62
Metodika návrhu světlometu v systému CATIA V5 vypracoval: Marek Mančík vedoucí práce: ing. František Samek Obor Aplikovaná mechanika Specializace Počítačová podpora konstruování 2005
Metodika návrhu světlometu v systému CATIA V5 vypracoval: Marek Mančík
vedoucí práce: ing. František Samek
Obor Aplikovaná mechanika
Specializace Počítačová podpora konstruování
2005


5
5
strana 5 Prohlášení
Prohlášení Prohlašuji, že jsem tuto diplomovou práci vypracoval samostatně a uvedl veškerou použitou literaturu. Marek Mančík

7
7
strana 7 Poděkování
Poděkování Rád bych tímto poděkoval vedoucímu diplomové práce panu ing. Františku Samkovi a Bohuslavu Lysovi za poskytnuté rady a odborné vedení, a vedoucímu konstrukční kanceláře firmy Automotive Lighting panu ing.Pavlu Zemanovi za poskytnutý prostor pro realizaci diplomové práce.


11
11
strana 9 Anotace
Anotace Tato diplomová práce postihuje problematiku návrhu světlometu v systému Catia v5r12. Popisuje veškeré problémy se kterými se konstruktér setkává a způsob jakými by je měl řešit je vysvětlen názorně na příkladech. Vše je tvořeno s ohledem na modifikovatelnost a možnosti snadných změn, ke kterým při návrhu světlometu dochází. Práce poslouží pro potřeby firmy Automotive Lighting k usnadnění a zrychlení návrhu světlometu. V praktické části je vytvořen samotný světlomet s aplikací všech doporučení, postupů a využití historie tam, kde je to možné a žádoucí. Anotation This thesis is solving the problem of the headlight’s proposal in a system Catia v5r12. It describes all the problems the constructor can have and also the way how to solve it, is explained on examples. It is all made with a look on the modification and opportunities of an easy changes, which this proposal may have. This project is going to be used for needs of Automotive lighting company to ease and accelerate headlamp’s design. In the practical part, there is a designed headlamp with an application of all recommendation, procedures and history uses, every possible way.

11
11
strana 11 Obsah
1 Úvod 14 1.1 Problematika, cíle a předpokládané přínosy 14 1.2 Struktura práce 15 2 Nejpoužívanější CAD systémy pro konstrukci automobilů 16 2.1 CATIA V4 16 2.2 CATIA V5 16 2.3 UNIGRAPHICS 17 2.4 Pro/engineer 17 2.5 ICEM Surf 17 2.6 Solid Works 18 3 Výrobci světlometů 19 3.1 HELLA 19 3.2 DEPO 19 3.3 TYC 19 3.4 VISTEON 19 3.5 VALEO 19 3.6 KOITO 20 3.7 Samlimp 20 3.8 Automotive Lighting 20 3.9 Podíl na trhu jednotlivých světlometů v roce 2003 21 4 Vývoj světlometu 23 4.1 Popis světlometu 23 4.1.1 Části světlometu 24 4.1.2 Rozdělení dle zdroje světla 25 4.1.2.1 Světlomety osazené běžnými žárovkami 25 4.1.2.2 Halogenové světlomety 25 4.1.2.3 Xenonové světlomety 26 4.1.2.4 Světlomety s LED 27 4.1.3 Rozdělení s ohledem na jejich tvorbu 27 5 Zásady a problémy konstrukce v CAD systému CATIA V5 29 5.1 Popis systému CATIA V5 29 5.2 Zásady a doporučení pro tvorbu v CATII V5 30 5.2.1 Vkládání plošné a objemové geometrie 30 5.2.2 Používat izolovanou výchozí geometrii 31 5.2.3 Skladba stromu při používání inteligentního součtu 31 5.2.4 Používání Part Body 34 5.2.5 Použití hlavních rovin 34 5.2.6 Používání izolovaných rovin 34 5.2.7 Vazby na 3D elementy 35 5.2.8 Tvorba složitějších těles z jednodušších 36 5.2.9 Vnitřní indexování Catie 37 6 Tvorba světlometu 38 6.1 Tvorba lepícího kanálu 38 6.1.1 Vodící křivka 38 6.1.2 Lepící kanál 39 6.1.2.1 Zadní uzavírací plocha 40 6.2.2.2 Modifikace lepícího kanálu změnou vodící křivky 41 6.2 Nohavice světlometu 43 6.3 Tvorba zadní části 43
12
strana 12 Obsah
6.4 Připojovací body 45 6.5 Bajonetová příruba 46 6.6 Odvětrání světlometu 47 6.7 Konektor 47 6.8 Seřizování světlometu 48 6.9 Úpravy pro upevnění směrového a parkovacího světla 49 6.10 Detailní úpravy světlometu 49 7 Závěr 51 8 Seznam pramenů 52 9 Přílohy 55
11
11
strana 13 1 Úvod
Přehled použitých zkratek CAD - (Computer Aided Design), počitačová podpora konstrukčních prací CAE – (Computer Aided Engineering), počítačová podpora inženýrských činností, zejména výpočtů CAM – (Computer Aided Manufacturing), počítačová podpora řízení výrobních strojů CAx – obecně všechny počítačem řízené procesy CNC – (Computer Numeric Control), vyšší forma řízení než NC, obsluha požadované operace je řízena většinou počítačem GPS – (Global Position Systém), systém globálního zaměřování slouží pro určování polohy LED – (Light Emitting Diode), polovodičová dioda vysoké životnosti a účinnosti produkující světlo NC – (Numeric Control), to jsou všechny stroje, které mají číslicové snímací polohy a je zde možnost si číselně nastavit požadovanou operaci PDM – (Product Data Management), Databázový systém využívaný pro řízení veškeré dokumentace, výkresů a ostatních dat, která jsou relevantní k výrobku. 3D – (3rd Dimension), prostorové 3 osé kreslení, 3D grafika/ funkce
12
12
strana 14 2. Nejpoužívanější CAD systémy pro konstrukci automobilů
1 Úvod
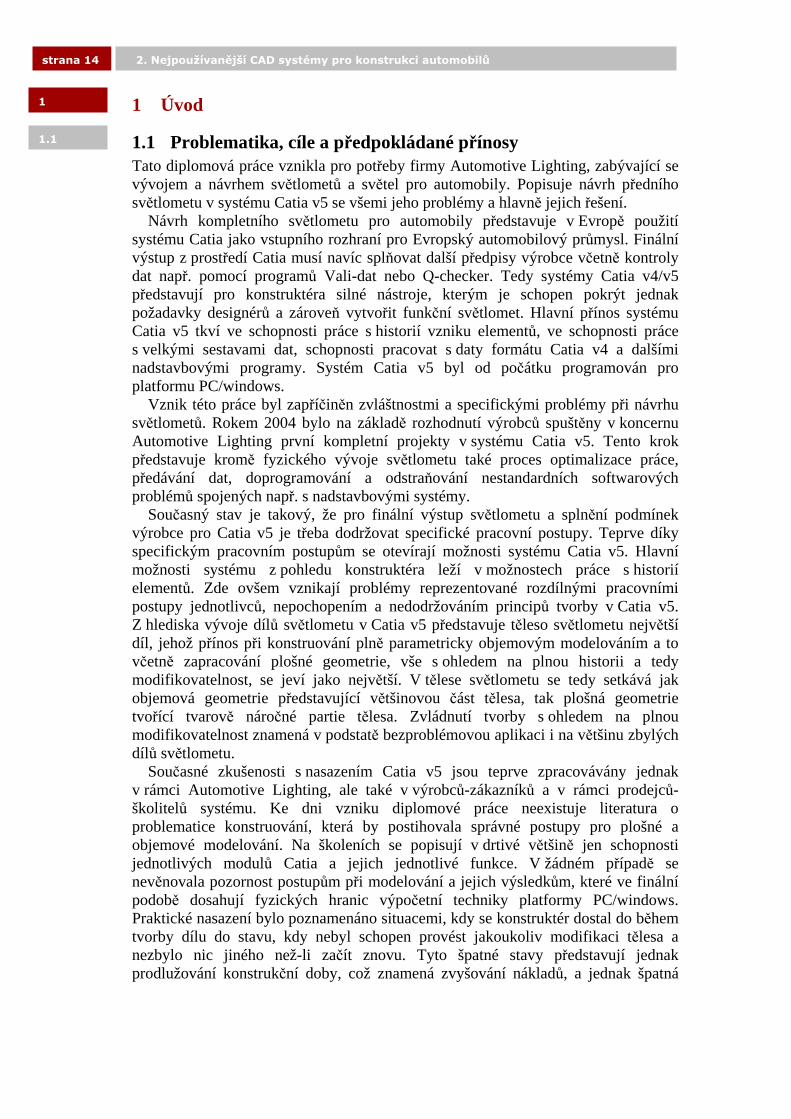
1.1 Problematika, cíle a předpokládané přínosy Tato diplomová práce vznikla pro potřeby firmy Automotive Lighting, zabývající se vývojem a návrhem světlometů a světel pro automobily. Popisuje návrh předního světlometu v systému Catia v5 se všemi jeho problémy a hlavně jejich řešení. Návrh kompletního světlometu pro automobily představuje v Evropě použití systému Catia jako vstupního rozhraní pro Evropský automobilový průmysl. Finální výstup z prostředí Catia musí navíc splňovat další předpisy výrobce včetně kontroly dat např. pomocí programů Vali-dat nebo Q-checker. Tedy systémy Catia v4/v5 představují pro konstruktéra silné nástroje, kterým je schopen pokrýt jednak požadavky designérů a zároveň vytvořit funkční světlomet. Hlavní přínos systému Catia v5 tkví ve schopnosti práce s historií vzniku elementů, ve schopnosti práce s velkými sestavami dat, schopnosti pracovat s daty formátu Catia v4 a dalšími nadstavbovými programy. Systém Catia v5 byl od počátku programován pro platformu PC/windows. Vznik této práce byl zapříčiněn zvláštnostmi a specifickými problémy při návrhu světlometů. Rokem 2004 bylo na základě rozhodnutí výrobců spuštěny v koncernu Automotive Lighting první kompletní projekty v systému Catia v5. Tento krok představuje kromě fyzického vývoje světlometu také proces optimalizace práce, předávání dat, doprogramování a odstraňování nestandardních softwarových problémů spojených např. s nadstavbovými systémy. Současný stav je takový, že pro finální výstup světlometu a splnění podmínek výrobce pro Catia v5 je třeba dodržovat specifické pracovní postupy. Teprve díky specifickým pracovním postupům se otevírají možnosti systému Catia v5. Hlavní možnosti systému z pohledu konstruktéra leží v možnostech práce s historií elementů. Zde ovšem vznikají problémy reprezentované rozdílnými pracovními postupy jednotlivců, nepochopením a nedodržováním principů tvorby v Catia v5. Z hlediska vývoje dílů světlometu v Catia v5 představuje těleso světlometu největší díl, jehož přínos při konstruování plně parametricky objemovým modelováním a to včetně zapracování plošné geometrie, vše s ohledem na plnou historii a tedy modifikovatelnost, se jeví jako největší. V tělese světlometu se tedy setkává jak objemová geometrie představující většinovou část tělesa, tak plošná geometrie tvořící tvarově náročné partie tělesa. Zvládnutí tvorby s ohledem na plnou modifikovatelnost znamená v podstatě bezproblémovou aplikaci i na většinu zbylých dílů světlometu. Současné zkušenosti s nasazením Catia v5 jsou teprve zpracovávány jednak v rámci Automotive Lighting, ale také v výrobců-zákazníků a v rámci prodejců-školitelů systému. Ke dni vzniku diplomové práce neexistuje literatura o problematice konstruování, která by postihovala správné postupy pro plošné a objemové modelování. Na školeních se popisují v drtivé většině jen schopnosti jednotlivých modulů Catia a jejich jednotlivé funkce. V žádném případě se nevěnovala pozornost postupům při modelování a jejich výsledkům, které ve finální podobě dosahují fyzických hranic výpočetní techniky platformy PC/windows. Praktické nasazení bylo poznamenáno situacemi, kdy se konstruktér dostal do během tvorby dílu do stavu, kdy nebyl schopen provést jakoukoliv modifikaci tělesa a nezbylo nic jiného než-li začít znovu. Tyto špatné stavy představují jednak prodlužování konstrukční doby, což znamená zvyšování nákladů, a jednak špatná
1.1
1
11
11
strana 15 1 Úvod
kvalita dat je předzvěstí problémů při tvorbě výkresové dokumentace a finální kontrole dat. Cílem je najít správnou cestu návrhu tělesa světlometu, jako jednoho ze hlavních dílů světlometu, a popsat veškeré problémy a jejich řešení s důrazem na modifikovatelnost, která provází celý vývoj světlometu. Těleso světlometu je nosným prvkem všech vnitřních dílů a skla, a zároveň dílem spojeným s karosérií vozu, tedy nejčastěji modifikovaný prvek během vývoje světlometu. Součástí cíle je provést parametrizaci lepícího kanálu včetně implantování do objemové geometrie zbylého tělesa. Tvorba optimalizovaného tělesa probíhala na testovacím tělese představovaném jednou z vyvíjených variant reálného světlometu s reálnými díly. Pro tvorbu obrazové dokumentace bylo těleso světlometu a některé díly upraveny z důvodu požadavků zákazníka na utajení dat. Přínosy optimalizace lze charakterizovat několika body: - zrychlení a usnadnění návrhu, - kratší čas potřebný pro provádění změn, ke kterým v průběhu návrhu dochází, - umožnění lepší a rychlejší reakce na potřeby zákazníka, - větší šance na získání zakázek, - snadnější orientace v geometrii provedené jiným konstruktérem, - schopnost se stejnou konstrukční kapacitou zvládnout větší objem zakázek, - minimalizace chyb, protože se jedná již o vyzkoušené postupy.
1.2 Struktura práce První část diplomové práce poukazuje na nejpoužívanější CAD systémy v automobilovém průmyslu. Jsou zde uvedeni výrobci světlometů a jejich podíl na Evropském a světovém trhu. Následuje vlastní seznámení s vývojem světlometů a jejich jednoduché rozdělení z pohledu konstruování a zdroje světla. V další části jsou objasněny a popsány jednotlivé zásady při konstruování v rámci Catia v5, které je nutné dodržovat pro dosažení výsledku. Jsou srozumitelně popsány a vysvětleny na příkladech i s jejich výhodami. Ve všech případech jsou dány do kontrastu s běžným pro tvorbu světlometu nevhodným řešením, aby sám čtenář viděl rozdíly. Dále jsou aplikovány veškeré poznatky z postupu konstruování na konkrétním zkušebním světlometu. Podrobně je popsána parametrizace lepícího kanálu jako jedné z hlavních částí tělesa světlometu a její zapracování do objemového tělesa.
1.2
12
12
strana 16 2. Nejpoužívanější CAD systémy pro konstrukci automobilů
2 Nejpoužívanější CAD systémy pro konstrukci automobilů
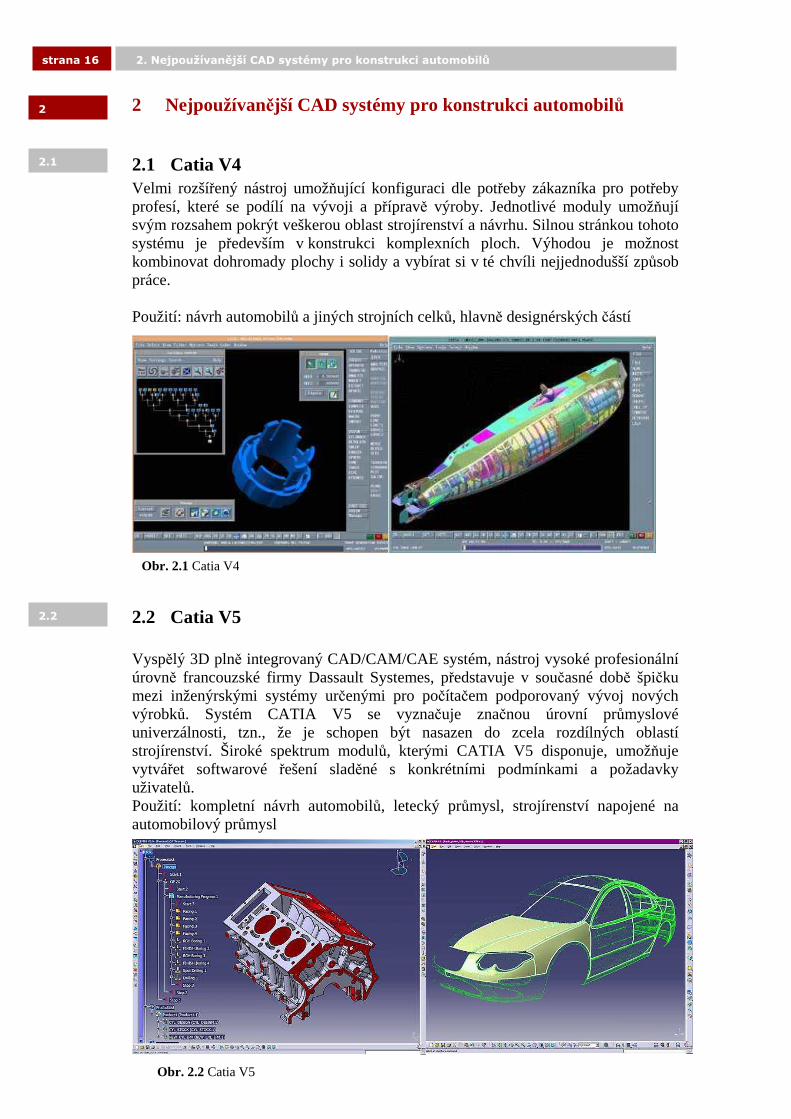
2.1 Catia V4 Velmi rozšířený nástroj umožňující konfiguraci dle potřeby zákazníka pro potřeby profesí, které se podílí na vývoji a přípravě výroby. Jednotlivé moduly umožňují svým rozsahem pokrýt veškerou oblast strojírenství a návrhu. Silnou stránkou tohoto systému je především v konstrukci komplexních ploch. Výhodou je možnost kombinovat dohromady plochy i solidy a vybírat si v té chvíli nejjednodušší způsob práce. Použití: návrh automobilů a jiných strojních celků, hlavně designérských částí
2.2 Catia V5 Vyspělý 3D plně integrovaný CAD/CAM/CAE systém, nástroj vysoké profesionální úrovně francouzské firmy Dassault Systemes, představuje v současné době špičku mezi inženýrskými systémy určenými pro počítačem podporovaný vývoj nových výrobků. Systém CATIA V5 se vyznačuje značnou úrovní průmyslové univerzálnosti, tzn., že je schopen být nasazen do zcela rozdílných oblastí strojírenství. Široké spektrum modulů, kterými CATIA V5 disponuje, umožňuje vytvářet softwarové řešení sladěné s konkrétními podmínkami a požadavky uživatelů. Použití: kompletní návrh automobilů, letecký průmysl, strojírenství napojené na automobilový průmysl
Obr. 2.1 Catia V4
Obr. 2.2 Catia V5
2.1
2
2.2
11
11
strana 17 2. Nejpoužívanější CAD systémy pro konstrukci automobilů
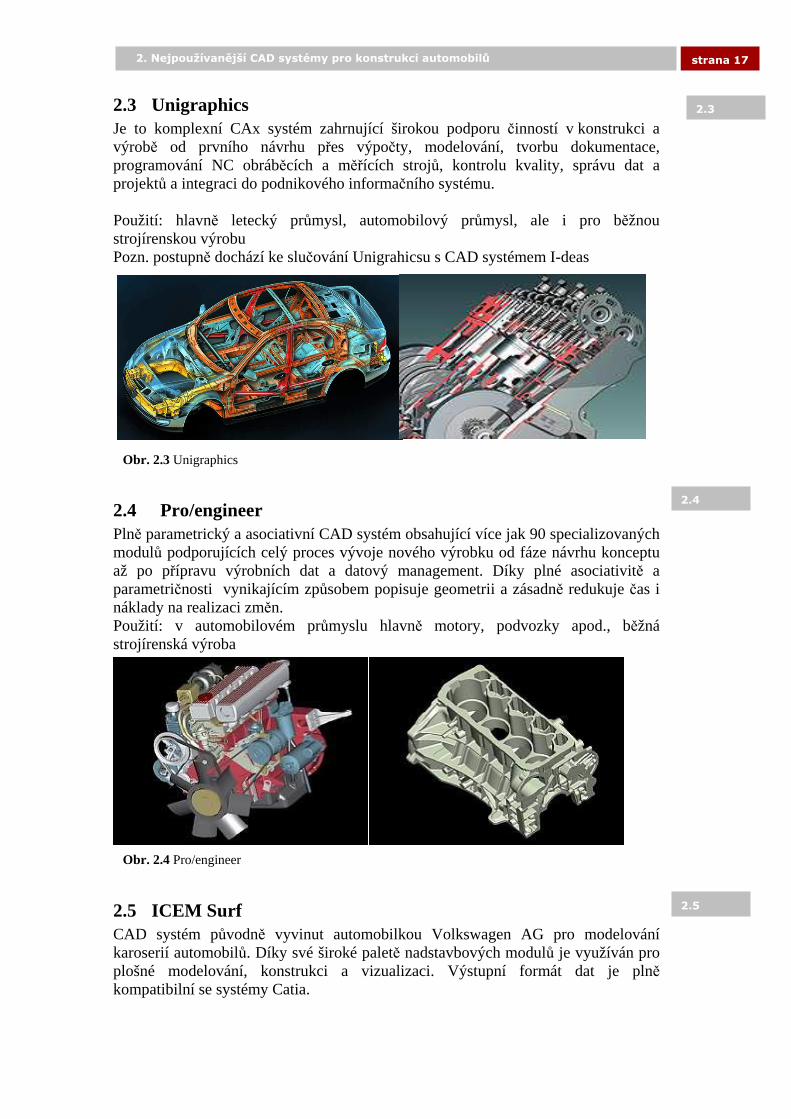
2.3 Unigraphics Je to komplexní CAx systém zahrnující širokou podporu činností v konstrukci a výrobě od prvního návrhu přes výpočty, modelování, tvorbu dokumentace, programování NC obráběcích a měřících strojů, kontrolu kvality, správu dat a projektů a integraci do podnikového informačního systému. Použití: hlavně letecký průmysl, automobilový průmysl, ale i pro běžnou strojírenskou výrobu Pozn. postupně dochází ke slučování Unigrahicsu s CAD systémem I-deas
2.4 Pro/engineer Plně parametrický a asociativní CAD systém obsahující více jak 90 specializovaných modulů podporujících celý proces vývoje nového výrobku od fáze návrhu konceptu až po přípravu výrobních dat a datový management. Díky plné asociativitě a parametričnosti vynikajícím způsobem popisuje geometrii a zásadně redukuje čas i náklady na realizaci změn. Použití: v automobilovém průmyslu hlavně motory, podvozky apod., běžná strojírenská výroba
2.5 ICEM Surf CAD systém původně vyvinut automobilkou Volkswagen AG pro modelování karoserií automobilů. Díky své široké paletě nadstavbových modulů je využíván pro plošné modelování, konstrukci a vizualizaci. Výstupní formát dat je plně kompatibilní se systémy Catia.
Obr. 2.3 Unigraphics
Obr. 2.4 Pro/engineer
2.3
2.4
2.5

12
12
strana 18 2. Nejpoužívanější CAD systémy pro konstrukci automobilů
Použití: stěžejní použití je v automobilovém průmyslu pro návrh designových konceptů
2.6 SolidWorks 3D parametrický objemový a plošný modelář, postaven na modelovacím jádru Parasolid. Vzhledem k jednoduchému a intuitivnímu ovládání je jeho zvládnutí rychlé. Použití: všeobecné strojírenství, v automobilovém průmyslu např. motory, různé součásti automobilů
Obr. 2.5 ICEM Surf
Obr. 2.6 SolidWorks
2.6

11
11
strana 19 3 Výrobci světlometů
3 Výrobci světlometů
3.1 Hella Společnost Hella je předním světovým výrobcem osvětlení pro osobní i nákladní automobily. Dodává své produkty přímo do výroby, ale i na trh náhradních dílů. Hlavní sídlo má v německém Lippstadtu a své aktivity rozvíjí v 54 výrobních závodech, které zaměstnávají 23 000 pracovníků. Sortiment společnosti Hella zahrnuje přibližně 15 000
položek soustředěných do ucelených výrobních řad: osvětlení automobilů, elektrika, elektronika. Hella spolupracuje s firmami Stanley Electric Tokyo, Leoni Bordnetz-Systeme, Siemens a Behr
3.2 Depo Společnost byla založena v roce 1977 na Taiwanu. Dnes dodává do více než 100 zemí světa. Společnost vlastní několik továren o celkové rozloze 30 000 m2 a zaměstnává na
800 zaměstnanců. Výkonné výrobní linky dokáží vyprodukovat až 50 000 výrobků denně.
3.3 Tyc Firma byla založena v roce 1986 ve městě Taipei na Taiwanu. Výrobce osvětlení osobních, dodávkových a nákladních automobilů s celosvětovou působností. Vlastní výrobní závody na Taiwanu, v Číně, Singapuru ale i v USA.
3.4 Visteon Tato firma patří mezi světovou špičku výrobců dílů pro automobilový průmysl. Jedním z produktů mimo světlometů je i chladící a klimatizační technika pro osobní automobily. Tato firma je zárukou vysoké kvality, což dokazuje i její spolupráce s největšími automobilovými společnostmi.
3.5 Valeo Společnost Valeo má v 25 zemích světa 143 výrobních závodů, 53 diagnostických center a 10 distribučních center. V současné době zaměstnává okolo 70 000 lidí. Své výrobky (osvětlení, zapalovací svíčky, chladiče, stěrače, zámky dveří,spínací skříňky, spojky, brzdy, chladiče
klimatizace, elektrické systémy) dodává převážně do prvovýroby firmám, jako Volkswagen, Renault, Nissan, Daimler Chrysler, Fiat, Ford nebo BMW, ale i na trh s náhradními díly.
3
3.1
3.2
3.3
3.4
3.5
12
12
strana 20 3 Výrobci světlometů
3.6 Koito Japonská firma Koito Manufacturing Co.Ltd působí i v České republice, kde v roce 2002 započala výrobu světlometů v Žatci. V roce 2005 plánuje jen v České republice výrobu 1,6 milionu světlometů. Hlavními zákazníky jsou Renault, Toyota, Isuzu,
Nissan, Honda, Suzuki, Iveko, Subaru .
3.7 Samlip Jihokorejská firma, která vznikla v roce 1987 v městě Daegu. Patří spolu s několika společnostmi do obchodního uskupení SL Corporation působící
v Korei, USA, Austrálii, Indii, Číně a Polsku. Světlomety vyrábí pro automobilky Hyundai, Opel, GM, Subaru, Mazda, Daihatsu.
3.8 Automotive Lighting Tato firma vznikla v roce 1999 sloučením Magneti Marelli Lighting a Bosch Lighting, kdy každá z těchto společností vlastnila polovinu Automotive Lighting. V roce 2001 byl výrobce zadních světel Seima
začleněn do AL Lighting, v tomto roce rovněž Bosch odprodal část svých akcií. O dva roky později Bosch odprodává své zbývající akcie Magneti Marelli. Automotive Lighting se zabývá výhradně vývojem a výrobou předních světlometů, pomocných a zadních světel. Své výrobní závody má v Mexiku, USA, Brazílii, Německu, Rakousku, Anglii, České republice, Španělsku, Francii, Itálii, Polsku, Rusku, Turecku, Japonsku a Malajsii. Zákazníky jsou např. BMW, Mercedes Benz, VW, Volvo, Honda, Fiat, Alfa-Romeo a další.
3.6
3.7
3.8
11
11
strana 21 3 Výrobci světlometů
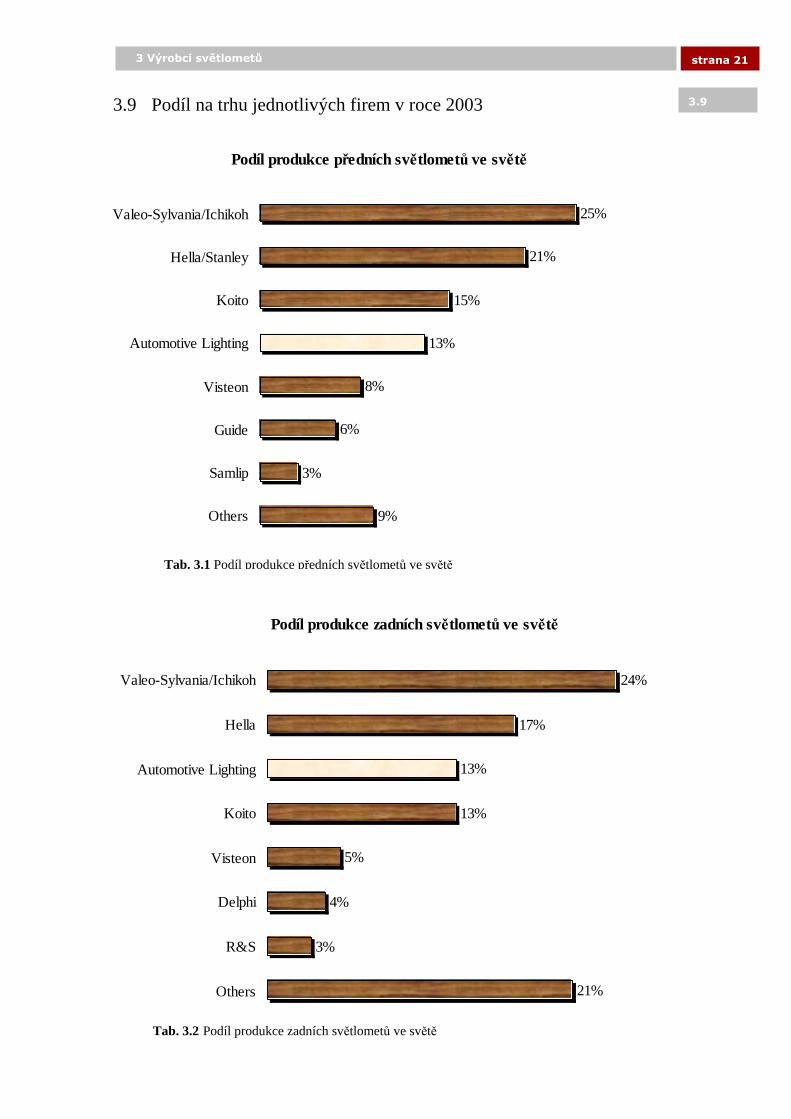
3.9 Podíl na trhu jednotlivých firem v roce 2003
Podíl produkce předních světlometů ve světě
9%
3%
6%
8%
13%
15%
21%
25%
Others
Samlip
Guide
Visteon
Automotive Lighting
Koito
Hella/Stanley
Valeo-Sylvania/Ichikoh
Podíl produkce zadních světlometů ve světě
21%
3%
4%
5%
13%
13%
17%
24%
Others
R&S
Delphi
Visteon
Koito
Automotive Lighting
Hella
Valeo-Sylvania/Ichikoh
Tab. 3.2 Podíl produkce zadních světlometů ve světě
Tab. 3.1 Podíl produkce předních světlometů ve světě
3.9
12
12
strana 22 4 Výrobce světlometu
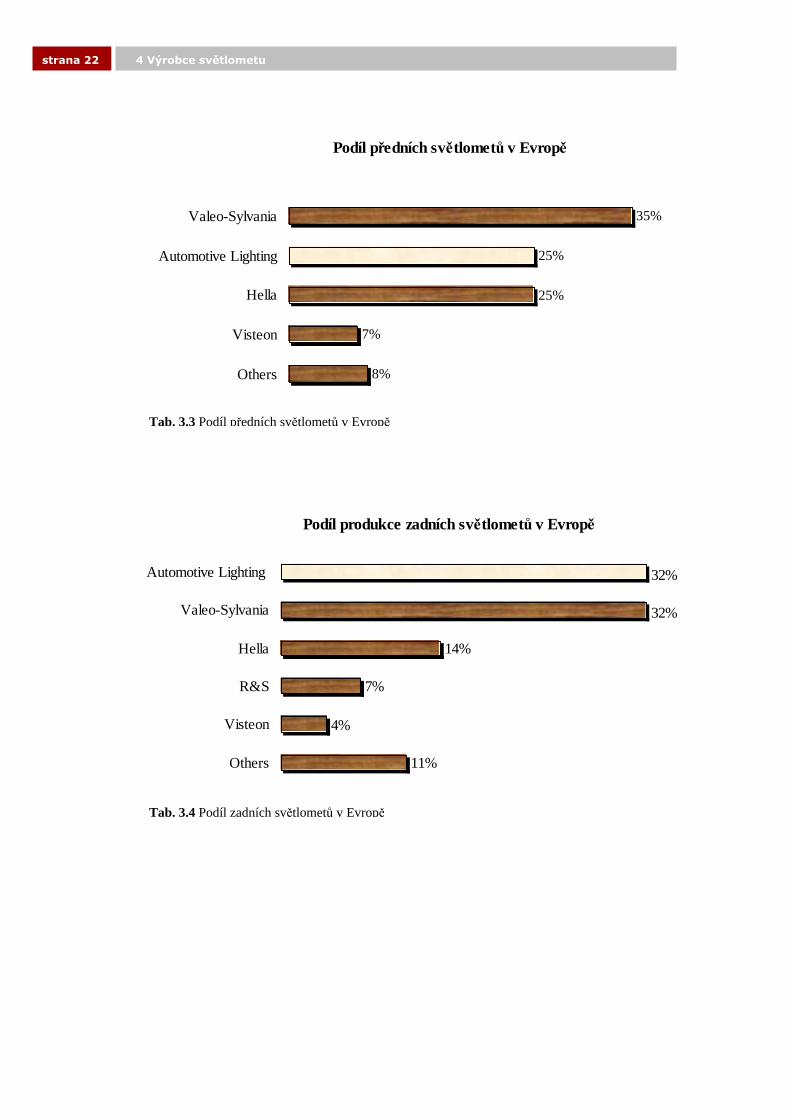
Podíl předních světlometů v Evropě
8%
7%
25%
25%
35%
Others
Visteon
Hella
Automotive Lighting
Valeo-Sylvania
Podíl produkce zadních světlometů v Evropě
11%
4%
7%
14%
32%
32%
Others
Visteon
R&S
Hella
Valeo-Sylvania
Automotive Lighting
Tab. 3.3 Podíl předních světlometů v Evropě
Tab. 3.4 Podíl zadních světlometů v Evropě
11
11
strana 23 4 Vývoj světlometu
4 Vývoj světlometu Prvním krokem ve vývoji světlometu je nabídka pro zákazníka vycházející z dat vytvořených pomocí reverzního inženýrství z hliněného modelu, nebo z návrhů designera. V této nabídce je vytvořen hrubý tvar světlometu s jeho vybavením a předpokládaným zástavbovým prostorem. V konstrukčních pracích se zohledňuje vyrobitelnost komponentů a to zejména designových dílů, jako jsou sklo a krycí ozdobné rámečky. Z pohledu spokojenosti zákazníka se musí vypracovat tyto nabídkové geometrie co nejdetailnější, protože propracovaná nabídka zvyšuje pravděpodobnost úspěchu. V této fázi návrhu je nutno vytvořit řadu variant světlometu v poměrně krátkém čase a tedy možnost parametrizace pro možnost rychlých změn jednotlivých geometrií je žádoucí. V dalším postupu konstrukčních prací se vytvářejí jednotlivé díly světlometu a vzájemně se upravují jejich prostorové tvary dle potřeb zákazníka, funkčnosti a vyrobitelnosti. Konstrukční fáze trvá dle jednotlivých projektů zhruba jeden rok, přičemž je nutno během vývoje vytvořit několik prototypů metodami Rapid Prototiping apod. Vytvoření prototypu v této fázi znamená přepracovat okamžitý stav tak, aby bylo možné jej vyrobit a použít pro zástavbu ve voze. Po dosažení finální podoby světlometu dochází k zadání výroby vstřikovacích forem a nástrojů, přípravy výroby a následně se rozběhne sériová výroba. Zároveň se vyrobí sada prototypů a to např. pomocí silikonové formy nebo CNC obráběním z hliníku. V této fázi se ještě zapracovávají jednotlivé změny, většinou drobného charakteru. Jedná se např. o zpevňující žebra na tělese, úpravy úkosů a zaoblení hran. Designové díly zůstávají většinou beze změn. Schválením a spuštěním výrobního procesu je vývoj samotného světlometu ukončen. Všechny části modelu světlometu jsou ve finálním stavu odevzdány jako uzavřené objemové těleso. V posledních letech dochází ke stále zvyšujícímu se tlaku na rychlost a modifikovatelnost dílů. Například v roce 2000 představoval objem konstrukčních prací na světlometu vývoj 1-2 verzí a jednoho prototypu během konstrukční fáze. V roce 2004 bylo pro stejného zákazníka zpracováno ve stejném období 6 variant nabídkového řešení, které vyústily ve tři finální verze světlometu a tři verze prototypu během konstrukční fáze. Dva měsíce před koncem konstrukční fáze došlo k zásadním změnám upevnění světlometu v karoserii vozu. To znamenalo přepracovat ve velmi krátkém čase tři verze světlometu.
4.1 Popis světlometu Přes 80 % všech silničních nehod se stane za šera, tmy či při špatném počasí. Cílem konstruktérů je připravit takové světlomety a osvětlení všeobecně, které zlepší výhled řidiče, což se musí projevit ve vyšší bezpečnosti jízdy i v cestovním komfortu.
Obr. 4.1 Natáčivý světlomet
4
4.1
12
12
strana 24 4 Vývoj světlometu
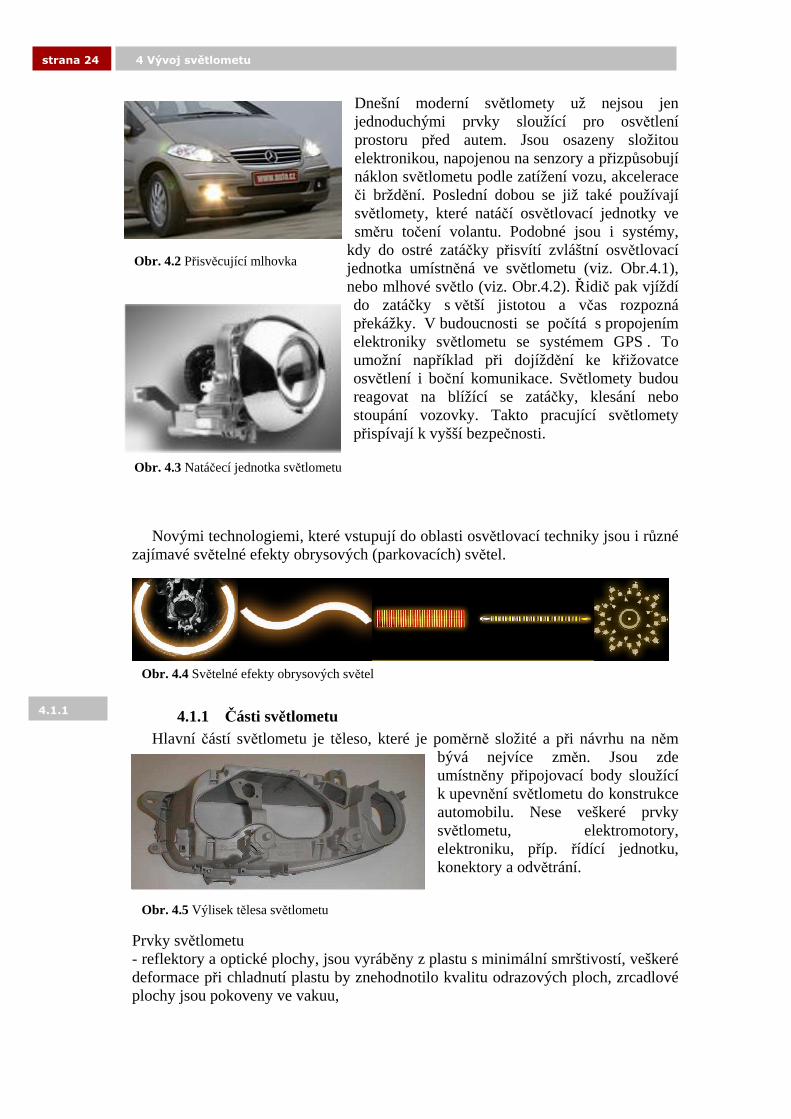
Dnešní moderní světlomety už nejsou jen jednoduchými prvky sloužící pro osvětlení prostoru před autem. Jsou osazeny složitou elektronikou, napojenou na senzory a přizpůsobují náklon světlometu podle zatížení vozu, akcelerace či brždění. Poslední dobou se již také používají světlomety, které natáčí osvětlovací jednotky ve směru točení volantu. Podobné jsou i systémy,
kdy do ostré zatáčky přisvítí zvláštní osvětlovací jednotka umístněná ve světlometu (viz. Obr.4.1), nebo mlhové světlo (viz. Obr.4.2). Řidič pak vjíždí do zatáčky s větší jistotou a včas rozpozná překážky. V budoucnosti se počítá s propojením elektroniky světlometu se systémem GPS . To umožní například při dojíždění ke křižovatce osvětlení i boční komunikace. Světlomety budou reagovat na blížící se zatáčky, klesání nebo stoupání vozovky. Takto pracující světlomety přispívají k vyšší bezpečnosti.
Novými technologiemi, které vstupují do oblasti osvětlovací techniky jsou i různé zajímavé světelné efekty obrysových (parkovacích) světel.
4.1.1 Části světlometu Hlavní částí světlometu je těleso, které je poměrně složité a při návrhu na něm
bývá nejvíce změn. Jsou zde umístněny připojovací body sloužící k upevnění světlometu do konstrukce automobilu. Nese veškeré prvky světlometu, elektromotory, elektroniku, příp. řídící jednotku, konektory a odvětrání.
Prvky světlometu - reflektory a optické plochy, jsou vyráběny z plastu s minimální smrštivostí, veškeré deformace při chladnutí plastu by znehodnotilo kvalitu odrazových ploch, zrcadlové plochy jsou pokoveny ve vakuu,
Obr. 4.2 Přisvěcující mlhovka
Obr. 4.4 Světelné efekty obrysových světel
Obr. 4.5 Výlisek tělesa světlometu
Obr. 4.3 Natáčecí jednotka světlometu
4.1.1
11
11
strana 25 4 Vývoj světlometu
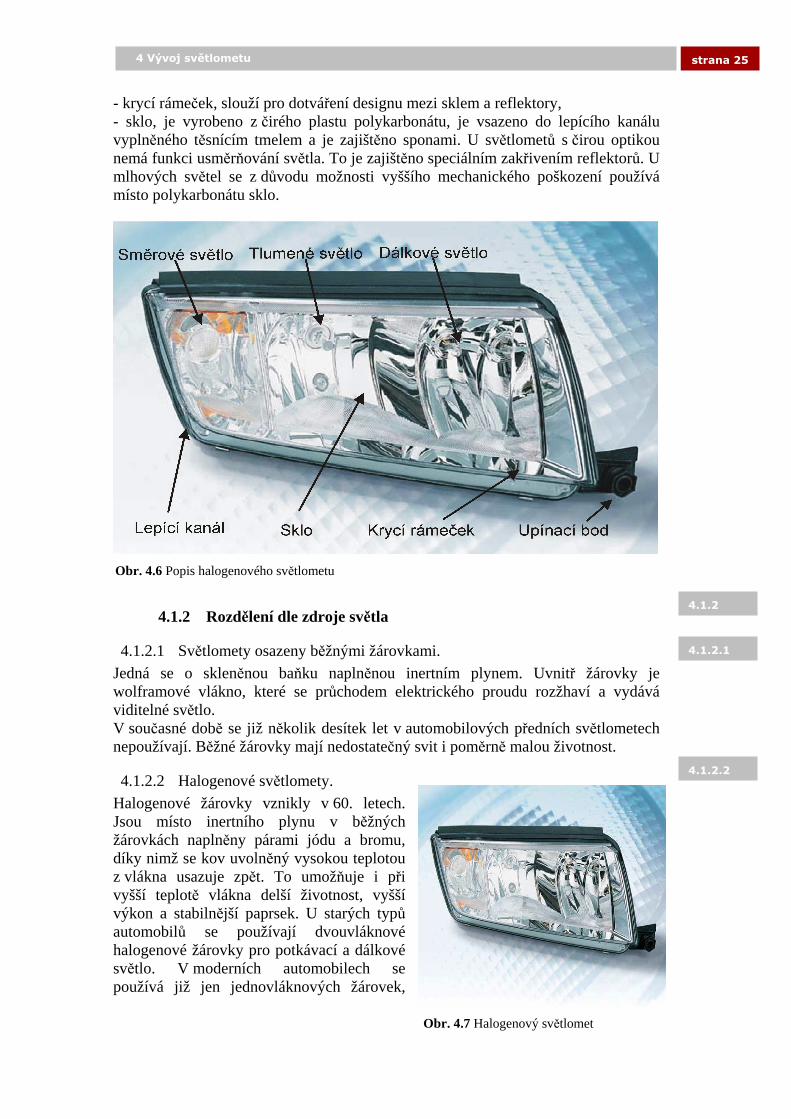
- krycí rámeček, slouží pro dotváření designu mezi sklem a reflektory, - sklo, je vyrobeno z čirého plastu polykarbonátu, je vsazeno do lepícího kanálu vyplněného těsnícím tmelem a je zajištěno sponami. U světlometů s čirou optikou nemá funkci usměrňování světla. To je zajištěno speciálním zakřivením reflektorů. U mlhových světel se z důvodu možnosti vyššího mechanického poškození používá místo polykarbonátu sklo.
4.1.2 Rozdělení dle zdroje světla
4.1.2.1 Světlomety osazeny běžnými žárovkami.
Jedná se o skleněnou baňku naplněnou inertním plynem. Uvnitř žárovky je wolframové vlákno, které se průchodem elektrického proudu rozžhaví a vydává viditelné světlo. V současné době se již několik desítek let v automobilových předních světlometech nepoužívají. Běžné žárovky mají nedostatečný svit i poměrně malou životnost.
4.1.2.2 Halogenové světlomety.
Halogenové žárovky vznikly v 60. letech. Jsou místo inertního plynu v běžných žárovkách naplněny párami jódu a bromu, díky nimž se kov uvolněný vysokou teplotou z vlákna usazuje zpět. To umožňuje i při vyšší teplotě vlákna delší životnost, vyšší výkon a stabilnější paprsek. U starých typů automobilů se používají dvouvláknové halogenové žárovky pro potkávací a dálkové světlo. V moderních automobilech se používá již jen jednovláknových žárovek,
Obr. 4.6 Popis halogenového světlometu
Obr. 4.7 Halogenový světlomet
4.1.2
4.1.2.1
4.1.2.2
12
12
strana 26 4 Vývoj světlometu
kdy přední světlomet má reflektor i žárovku zvlášť pro dálkové i potkávací světlo.
4.1.2.3 Xenonové světlomety
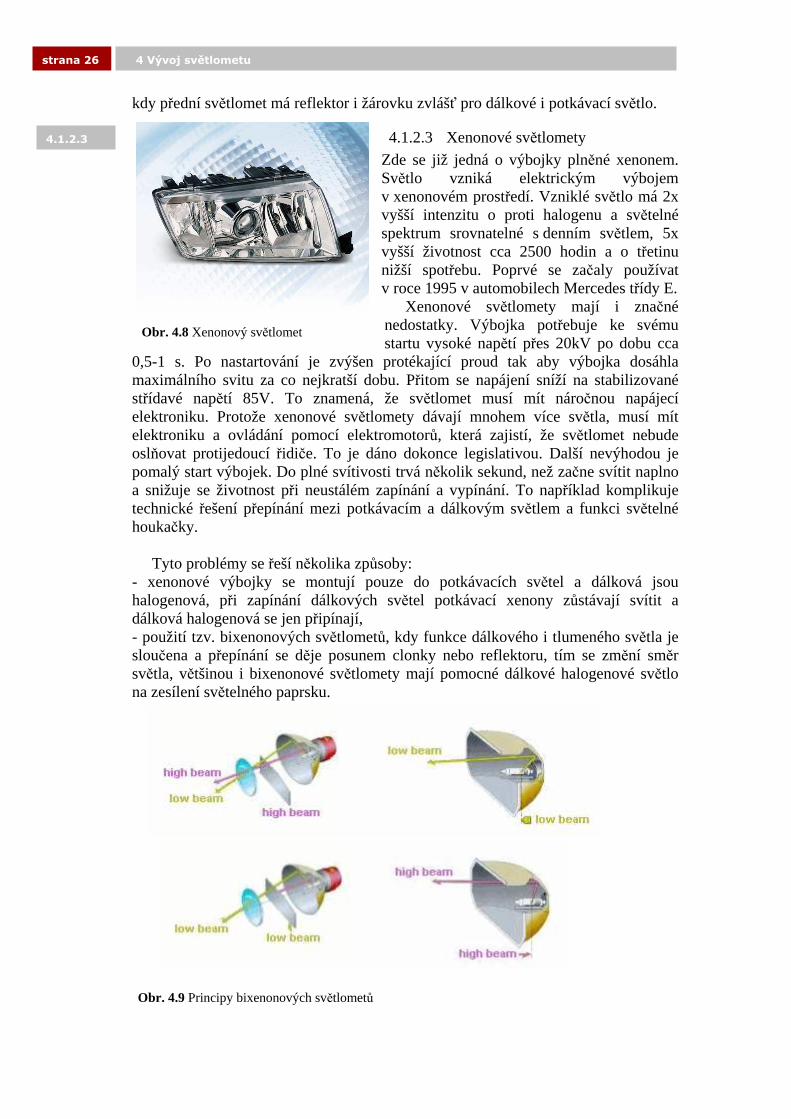
Zde se již jedná o výbojky plněné xenonem. Světlo vzniká elektrickým výbojem v xenonovém prostředí. Vzniklé světlo má 2x vyšší intenzitu o proti halogenu a světelné spektrum srovnatelné s denním světlem, 5x vyšší životnost cca 2500 hodin a o třetinu nižší spotřebu. Poprvé se začaly používat v roce 1995 v automobilech Mercedes třídy E. Xenonové světlomety mají i značné nedostatky. Výbojka potřebuje ke svému startu vysoké napětí přes 20kV po dobu cca
0,5-1 s. Po nastartování je zvýšen protékající proud tak aby výbojka dosáhla maximálního svitu za co nejkratší dobu. Přitom se napájení sníží na stabilizované střídavé napětí 85V. To znamená, že světlomet musí mít náročnou napájecí elektroniku. Protože xenonové světlomety dávají mnohem více světla, musí mít elektroniku a ovládání pomocí elektromotorů, která zajistí, že světlomet nebude oslňovat protijedoucí řidiče. To je dáno dokonce legislativou. Další nevýhodou je pomalý start výbojek. Do plné svítivosti trvá několik sekund, než začne svítit naplno a snižuje se životnost při neustálém zapínání a vypínání. To například komplikuje technické řešení přepínání mezi potkávacím a dálkovým světlem a funkci světelné houkačky. Tyto problémy se řeší několika způsoby: - xenonové výbojky se montují pouze do potkávacích světel a dálková jsou halogenová, při zapínání dálkových světel potkávací xenony zůstávají svítit a dálková halogenová se jen připínají, - použití tzv. bixenonových světlometů, kdy funkce dálkového i tlumeného světla je sloučena a přepínání se děje posunem clonky nebo reflektoru, tím se změní směr světla, většinou i bixenonové světlomety mají pomocné dálkové halogenové světlo na zesílení světelného paprsku.
Obr. 4.8 Xenonový světlomet
Obr. 4.9 Principy bixenonových světlometů
4.1.2.3
11
11
strana.27 4 Vývoj světlometu
4.1.2.4 Světlomety s LED
Jako zdroje světla se využívá polovodičových LED diod. Ty jsou malé, lehké, mají vysokou účinnost, dlouhou životnost a dosažení plného světelného výkonu ve velmi krátkém čase. Díky těmto vlastnostem je možné světlomety navrhovat menší a kompaktnější. Problémem je vyřešit jejich zahřívání. Jednotlivé LED diody nedodávají dostatečný světelný tok, a proto se tento problém řeší použitím potřebného množství diod. Evropská legislativa ještě neumožňuje použití LED diod jako zdroje světla pro hlavní světlomety. V současné době se používají do zadních světlometů a v předních pro směrová světla. Vhodné jsou pro použití do brzdových světel pro jejich rychlou reakci asi 50 milisekund proti běžným žárovkám cca 200 milisekund. Řidič jedoucí za brzdícím automobilem je tak mnohem rychleji informován o brždění automobilu jedoucího před ním.
4.1.3 Rozdělení s ohledem na jejich tvorbu Jednotlivé části světlometu můžeme rozdělit dle povahy na: - designové díly: sklo, reflektor,ozdobné rámečky a tubusy, tyto časti se konstruují s ohledem na optickou kvalitu, - nosné díly: těleso, pomocné díly, konstruují se bez ohledu na optickou kvalitu, - nakupované díly: šrouby, elektronické prvky, ozubené převody. U designových dílů nepřipadá parametrizace v úvahu. Z důvodu požadovaných kvalit ploch a geometrických tvarů, které vychází z obecných křivek a ploch, není parametrizace možná nebo nepřináší výhody. Nástroje pro práci s obecnými plochami jsou v systému Catia V5r14 nedostatečné. Designové díly je nutno tvořit v Catii V4 nebo v jiných CAD systémech (ICEM Surf) a pak je následně exportovat pro práci v Catii V5. Například podle směrnice VW pro designové díly, musí být zaručeno, že všechny designové plochy nesmí překročit hodnotu 9. řádu plochy. Systém Catia V5r14 dosud neobsahuje nástroje pro aproximaci ploch nebo křivek, tedy konstruktér nemá možnost plně ovlivnit kvalitu plochy v plném měřítku. Při návrhu nosných dílů je naopak vhodné využít alespoň částečné parametrizace. Hlavním komponentem je těleso světlometu, které je sice tvarově náročné na zpracování, ale nemá požadavky na optickou kvalitu. Je relativně tvarově podobné (má charakteristickou skladbu) a případná parametrizace by přinesla značné časové úspory v celém objemu konstrukčních prací.
Obr. 4.10 Světlomety s LED
4.1.2.4
4.1.3

12
12
strana 28 4 Vývoj světlometu
Pomocné díly, především různé nosníky apod. jsou většinou velmi atypické. Nedochází zde ke změnám v průběhu návrhu a z tohoto důvodu není parametrizace přínosná. Nakupované díly jako šrouby či elektronické systémy, případně další sériové komponenty není třeba při návrhu parametrizovat. Do procesu návrhu totiž vstupují jako nemněné a pouze se zohledňují co do funkčnosti a prostorových nároků.
11
11
strana.29 5 Zásady a problémy konstrukce v CAD systému Catia v5
5 Zásady a problémy konstrukce v CAD systému Catia V5
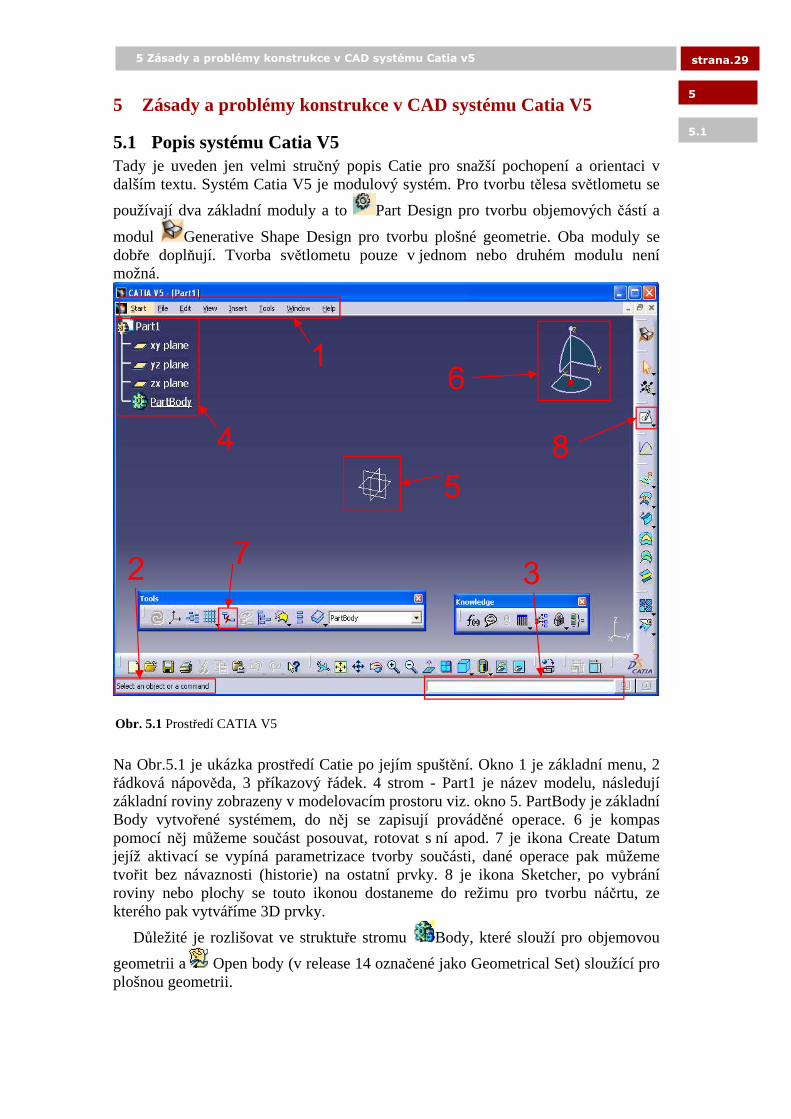
5.1 Popis systému Catia V5 Tady je uveden jen velmi stručný popis Catie pro snažší pochopení a orientaci v dalším textu. Systém Catia V5 je modulový systém. Pro tvorbu tělesa světlometu se
používají dva základní moduly a to Part Design pro tvorbu objemových částí a
modul Generative Shape Design pro tvorbu plošné geometrie. Oba moduly se dobře doplňují. Tvorba světlometu pouze v jednom nebo druhém modulu není možná.
Na Obr.5.1 je ukázka prostředí Catie po jejím spuštění. Okno 1 je základní menu, 2 řádková nápověda, 3 příkazový řádek. 4 strom - Part1 je název modelu, následují základní roviny zobrazeny v modelovacím prostoru viz. okno 5. PartBody je základní Body vytvořené systémem, do něj se zapisují prováděné operace. 6 je kompas pomocí něj můžeme součást posouvat, rotovat s ní apod. 7 je ikona Create Datum jejíž aktivací se vypíná parametrizace tvorby součásti, dané operace pak můžeme tvořit bez návaznosti (historie) na ostatní prvky. 8 je ikona Sketcher, po vybrání roviny nebo plochy se touto ikonou dostaneme do režimu pro tvorbu náčrtu, ze kterého pak vytváříme 3D prvky.
Důležité je rozlišovat ve struktuře stromu Body, které slouží pro objemovou
geometrii a Open body (v release 14 označené jako Geometrical Set) sloužící pro plošnou geometrii.
Obr. 5.1 Prostředí CATIA V5
5
5.1
12
12
strana 30 5 Zásady a problémy konstrukce v CAD systému Catia v5
Při modelování světlometů se velkou měrou využívá tzv. Booleanských operací (v textu nazývaných taky jako inteligentní součty). Každá logická část světlometu, se kterou se počítá, že by se v průběhu návrhu mohla měnit, myšleno tím nejen její rozměry ale hlavně poloha, se vloží do samostatného Body. Geometrie v Body musí být izolovaná od veškeré jiné geometrie a souřadnicového systému. Takto vytvořená geometrie se pak k základnímu tělesu přičítá. Tento způsob umožňuje snadnou a rychlou modifikaci s využitím kompasu. Můžeme tak snadno a rychle měnit polohu každé geometrie vložené právě v samostatném Body.
5.2 Zásady a doporučení pro tvorbu v Catii V5 Zde je třeba uvést několik doporučení, které je třeba dodržovat při návrhu světlometu. Světlomet tak bude lépe a rychleji modifikovatelný. Tyto doporučení se vztahují k release 12. Současná release 14 zásadně problém návrhu neřeší. Snad jedinou podstatnou změnou je možnost ponechat plošnou geometrii přímo v Body. V release 12 toto možné není. Plošná geometrie se vkládá do Body prostřednictvím Open_body. Pro tvorbu světlometu je ponechání plošné geometrie přímo v Body nevhodné z důvodu přehlednosti struktury stromu.
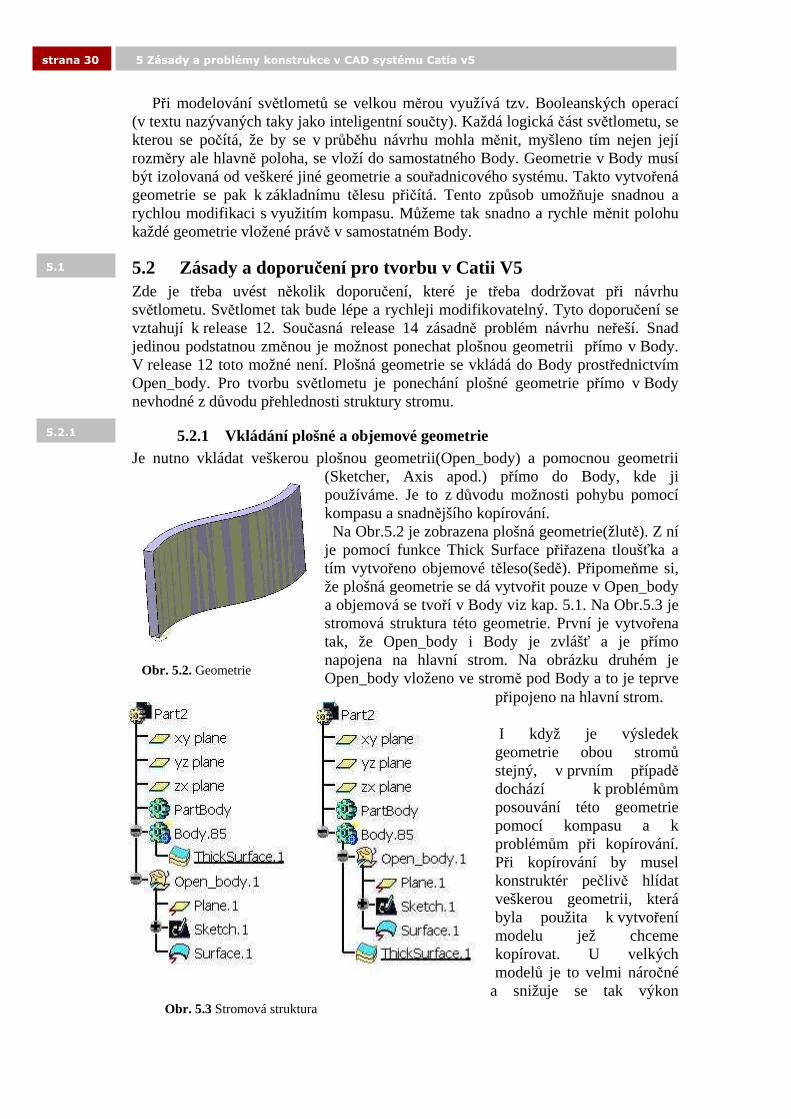
5.2.1 Vkládání plošné a objemové geometrie Je nutno vkládat veškerou plošnou geometrii(Open_body) a pomocnou geometrii
(Sketcher, Axis apod.) přímo do Body, kde ji používáme. Je to z důvodu možnosti pohybu pomocí kompasu a snadnějšího kopírování. Na Obr.5.2 je zobrazena plošná geometrie(žlutě). Z ní je pomocí funkce Thick Surface přiřazena tloušťka a tím vytvořeno objemové těleso(šedě). Připomeňme si, že plošná geometrie se dá vytvořit pouze v Open_body a objemová se tvoří v Body viz kap. 5.1. Na Obr.5.3 je stromová struktura této geometrie. První je vytvořena tak, že Open_body i Body je zvlášť a je přímo napojena na hlavní strom. Na obrázku druhém je Open_body vloženo ve stromě pod Body a to je teprve
připojeno na hlavní strom. I když je výsledek geometrie obou stromů stejný, v prvním případě dochází k problémům posouvání této geometrie pomocí kompasu a k problémům při kopírování. Při kopírování by musel konstruktér pečlivě hlídat veškerou geometrii, která byla použita k vytvoření modelu jež chceme kopírovat. U velkých modelů je to velmi náročné
a snižuje se tak výkon
Obr. 5.2. Geometrie
Obr. 5.3 Stromová struktura
5.1
5.2.1
11
11
strana.31 5 Zásady a problémy konstrukce v CAD systému Catia v5
konstruktéra. Strom na druhém obrázku všechny tyto komplikace řeší. Veškerá plošná geometrie je vložená přímo v Body, kde je použita.
5.2.2 Používat izolovanou výchozí geometrii Pro tvorbu složitých objemových těles je nutno zajistit, aby zdrojová plošná geometrie neměla vazby na ostatní části zbylé geometrie. To zajistíme vypnutím
historie před provedením operace pomocí funkce Create Datum.
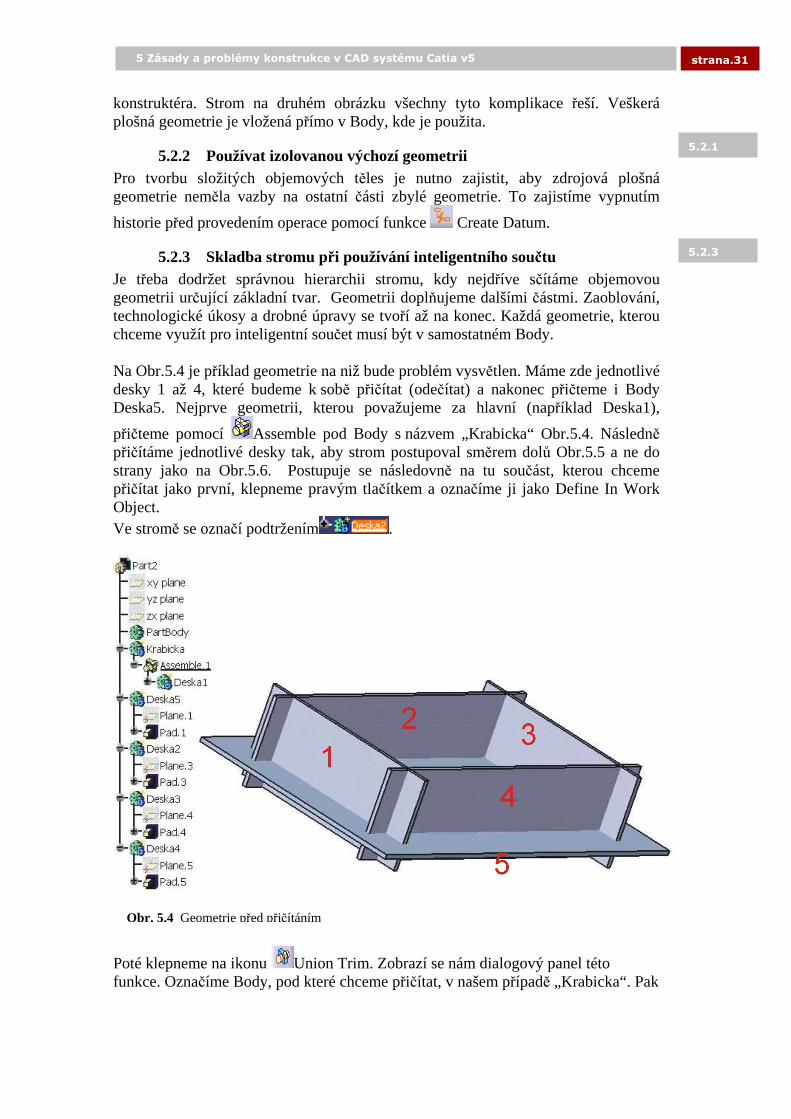
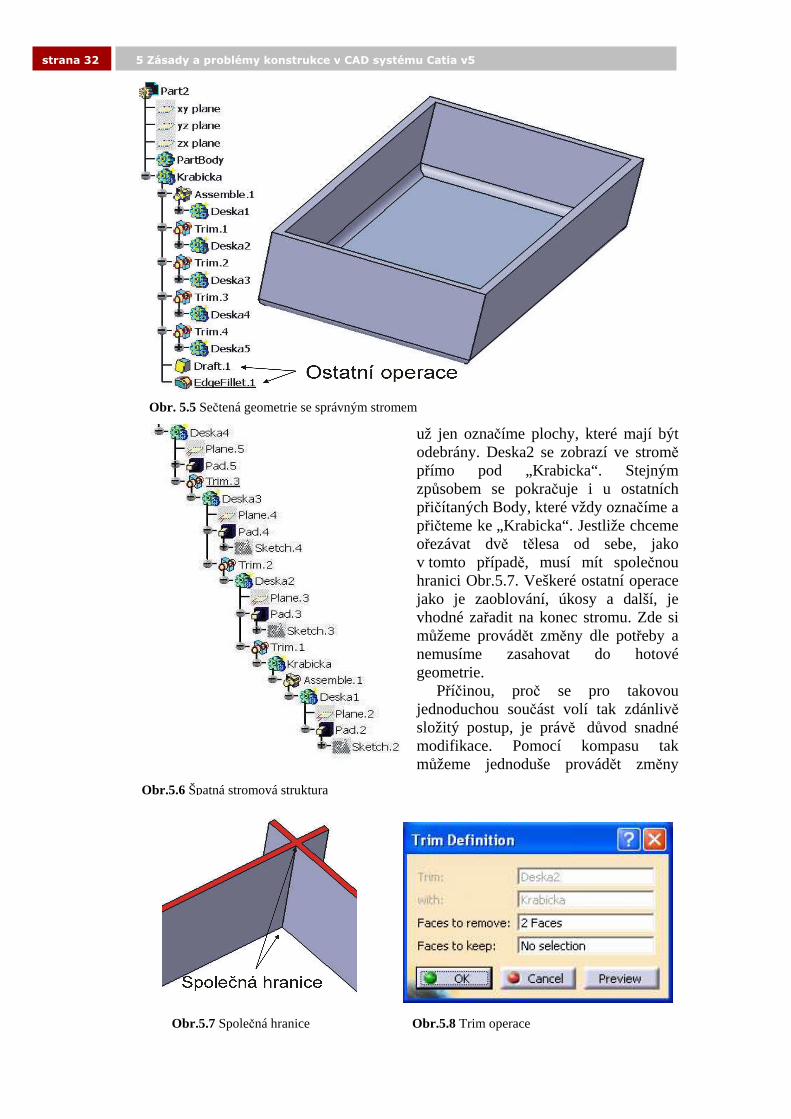
5.2.3 Skladba stromu při používání inteligentního součtu Je třeba dodržet správnou hierarchii stromu, kdy nejdříve sčítáme objemovou geometrii určující základní tvar. Geometrii doplňujeme dalšími částmi. Zaoblování, technologické úkosy a drobné úpravy se tvoří až na konec. Každá geometrie, kterou chceme využít pro inteligentní součet musí být v samostatném Body. Na Obr.5.4 je příklad geometrie na niž bude problém vysvětlen. Máme zde jednotlivé desky 1 až 4, které budeme k sobě přičítat (odečítat) a nakonec přičteme i Body Deska5. Nejprve geometrii, kterou považujeme za hlavní (například Deska1),
přičteme pomocí Assemble pod Body s názvem „Krabicka“ Obr.5.4. Následně přičítáme jednotlivé desky tak, aby strom postupoval směrem dolů Obr.5.5 a ne do strany jako na Obr.5.6. Postupuje se následovně na tu součást, kterou chceme přičítat jako první, klepneme pravým tlačítkem a označíme ji jako Define In Work Object. Ve stromě se označí podtržením .
Poté klepneme na ikonu Union Trim. Zobrazí se nám dialogový panel této funkce. Označíme Body, pod které chceme přičítat, v našem případě „Krabicka“. Pak
Obr. 5.4 Geometrie před přičítáním
5.2.1
5.2.3
12
12
strana 32 5 Zásady a problémy konstrukce v CAD systému Catia v5
Obr.5.6 Špatná stromová struktura
už jen označíme plochy, které mají být odebrány. Deska2 se zobrazí ve stromě přímo pod „Krabicka“. Stejným způsobem se pokračuje i u ostatních přičítaných Body, které vždy označíme a přičteme ke „Krabicka“. Jestliže chceme ořezávat dvě tělesa od sebe, jako v tomto případě, musí mít společnou hranici Obr.5.7. Veškeré ostatní operace jako je zaoblování, úkosy a další, je vhodné zařadit na konec stromu. Zde si můžeme provádět změny dle potřeby a nemusíme zasahovat do hotové geometrie. Příčinou, proč se pro takovou jednoduchou součást volí tak zdánlivě složitý postup, je právě důvod snadné modifikace. Pomocí kompasu tak můžeme jednoduše provádět změny
Obr. 5.5 Sečtená geometrie se správným stromem
Obr.5.8 Trim operace Obr.5.7 Společná hranice
11
11
strana 33 5 Zásady a problémy konstrukce v CAD systému Catia v5
Obr.5.11 Geometrie u níž nejde najít společnou hranici
Obr.5.12 Izolované roviny
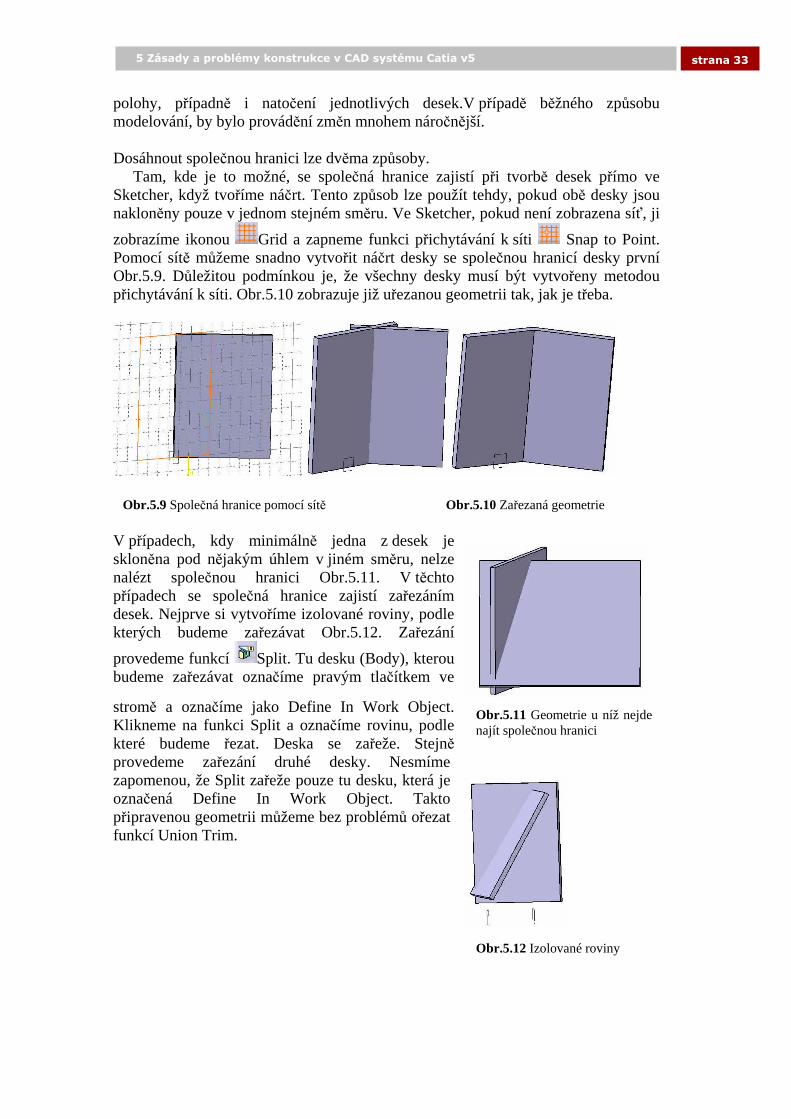
polohy, případně i natočení jednotlivých desek.V případě běžného způsobu modelování, by bylo provádění změn mnohem náročnější. Dosáhnout společnou hranici lze dvěma způsoby. Tam, kde je to možné, se společná hranice zajistí při tvorbě desek přímo ve Sketcher, když tvoříme náčrt. Tento způsob lze použít tehdy, pokud obě desky jsou nakloněny pouze v jednom stejném směru. Ve Sketcher, pokud není zobrazena síť, ji
zobrazíme ikonou Grid a zapneme funkci přichytávání k síti Snap to Point. Pomocí sítě můžeme snadno vytvořit náčrt desky se společnou hranicí desky první Obr.5.9. Důležitou podmínkou je, že všechny desky musí být vytvořeny metodou přichytávání k síti. Obr.5.10 zobrazuje již uřezanou geometrii tak, jak je třeba.
V případech, kdy minimálně jedna z desek je skloněna pod nějakým úhlem v jiném směru, nelze nalézt společnou hranici Obr.5.11. V těchto případech se společná hranice zajistí zařezáním desek. Nejprve si vytvoříme izolované roviny, podle kterých budeme zařezávat Obr.5.12. Zařezání
provedeme funkcí Split. Tu desku (Body), kterou budeme zařezávat označíme pravým tlačítkem ve
stromě a označíme jako Define In Work Object. Klikneme na funkci Split a označíme rovinu, podle které budeme řezat. Deska se zařeže. Stejně provedeme zařezání druhé desky. Nesmíme zapomenou, že Split zařeže pouze tu desku, která je označená Define In Work Object. Takto připravenou geometrii můžeme bez problémů ořezat funkcí Union Trim.
Obr.5.9 Společná hranice pomocí sítě Obr.5.10 Zařezaná geometrie
12
12
strana 34 5 Zásady a problémy konstrukce v CAD systému Catia v5
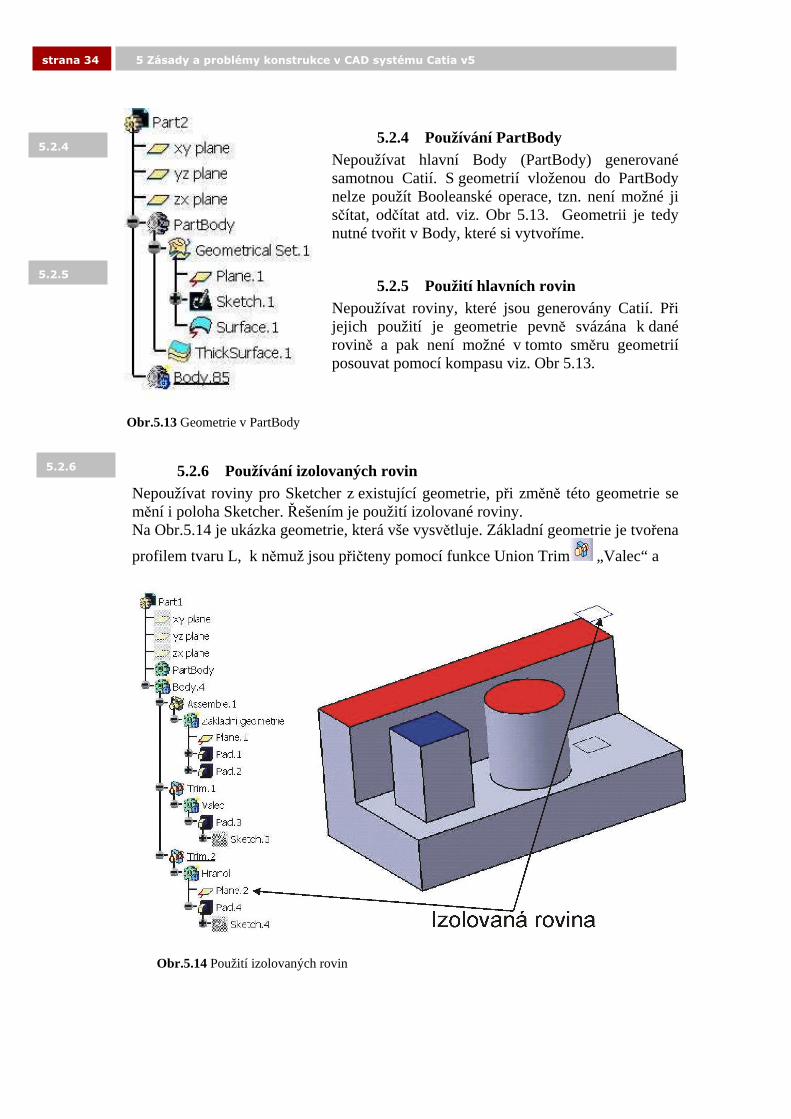
5.2.4 Používání PartBody Nepoužívat hlavní Body (PartBody) generované samotnou Catií. S geometrií vloženou do PartBody nelze použít Booleanské operace, tzn. není možné ji sčítat, odčítat atd. viz. Obr 5.13. Geometrii je tedy nutné tvořit v Body, které si vytvoříme.
5.2.5 Použití hlavních rovin Nepoužívat roviny, které jsou generovány Catií. Při jejich použití je geometrie pevně svázána k dané rovině a pak není možné v tomto směru geometrií posouvat pomocí kompasu viz. Obr 5.13.
5.2.6 Používání izolovaných rovin Nepoužívat roviny pro Sketcher z existující geometrie, při změně této geometrie se mění i poloha Sketcher. Řešením je použití izolované roviny. Na Obr.5.14 je ukázka geometrie, která vše vysvětluje. Základní geometrie je tvořena
profilem tvaru L, k němuž jsou přičteny pomocí funkce Union Trim „Valec“ a
Obr.5.14 Použití izolovaných rovin
Obr.5.13 Geometrie v PartBody
5.2.4
5.2.5
5.2.6
11
11
strana 35 5 Zásady a problémy konstrukce v CAD systému Catia v5
"Hranol“. „Valec“ je tvořen způsobem, jaký by se neměl používat. To znamená, že Sketcher je umístněn pomocí plochy „Zakladni geometrie“ (červeně), ale „Hranol“ je tvořen pomocí odizolované Plane.2 (modře). To jaký to má vliv na další modelování je na Obr.5.15. S „Hranolem“ je možné bez problému pohybovat pomocí kompasu. S „Valcem“ toto možné není.
Jestliže změníme polohu horní plochy (červeně), automaticky se mění zařezání „Valce“. U „Hranolu“ tento problém není. Tyto problémy jsou způsobené tím, že „Valec“ má vazbu na Základní geometrii.
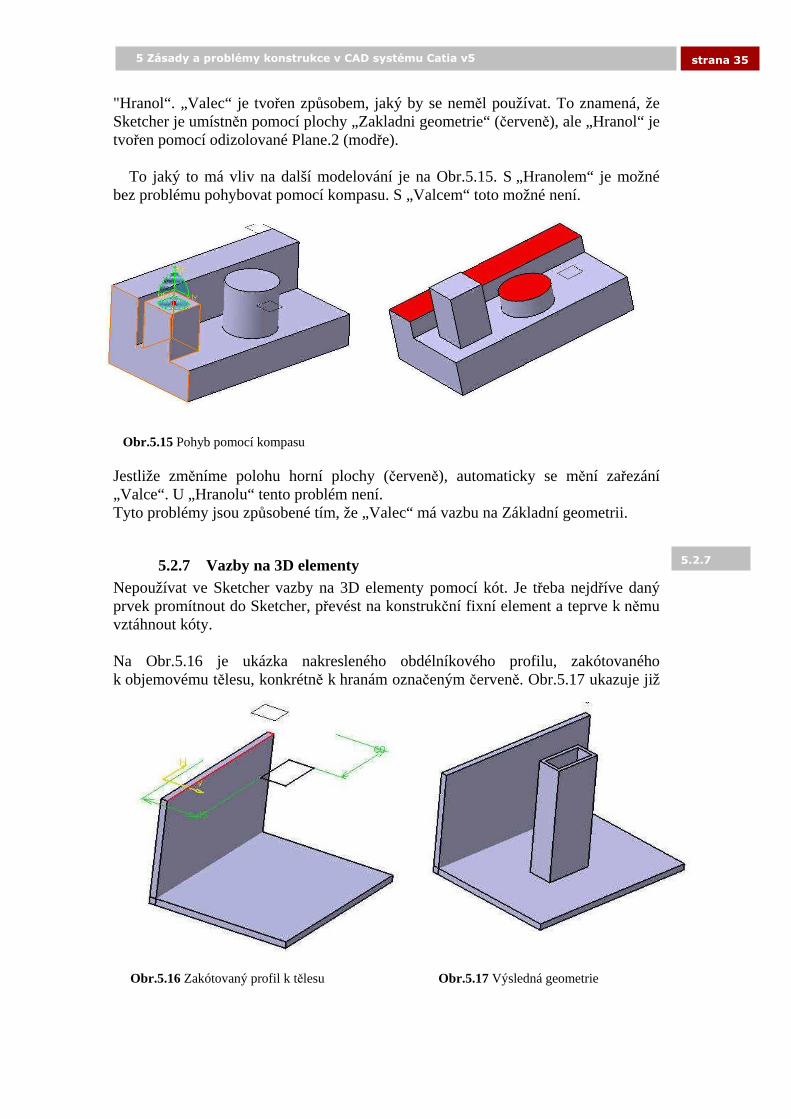
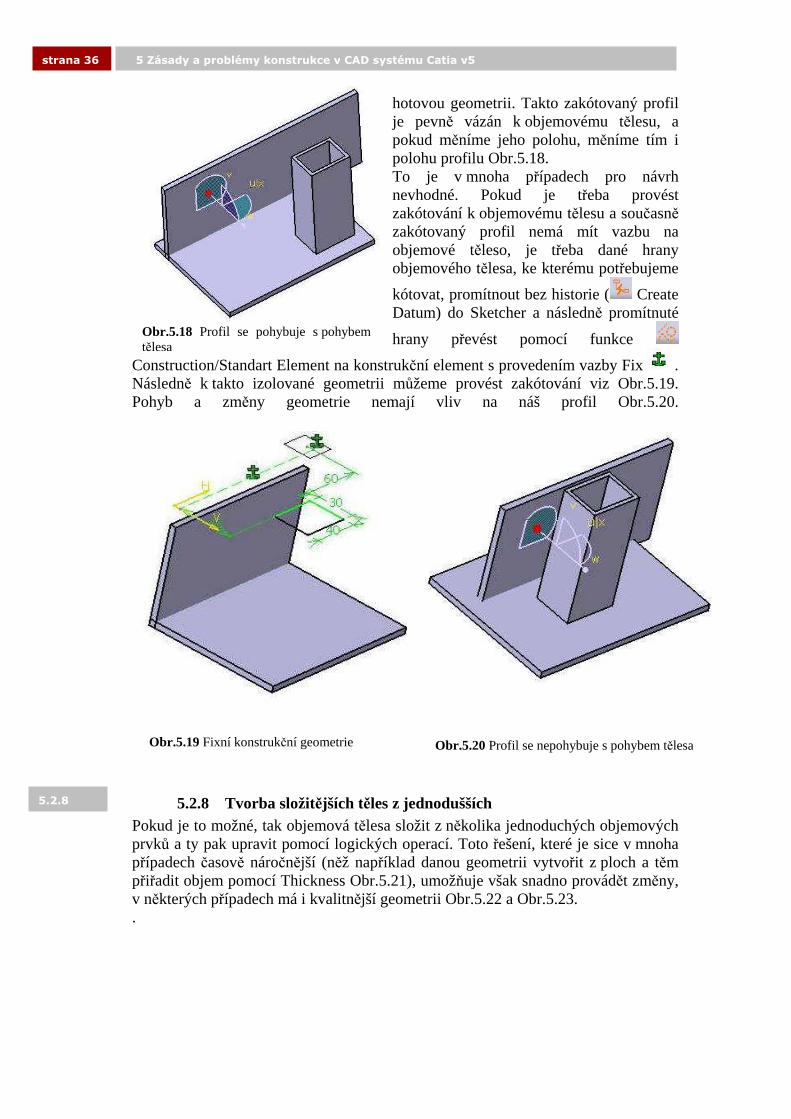
5.2.7 Vazby na 3D elementy Nepoužívat ve Sketcher vazby na 3D elementy pomocí kót. Je třeba nejdříve daný prvek promítnout do Sketcher, převést na konstrukční fixní element a teprve k němu vztáhnout kóty. Na Obr.5.16 je ukázka nakresleného obdélníkového profilu, zakótovaného k objemovému tělesu, konkrétně k hranám označeným červeně. Obr.5.17 ukazuje již
Obr.5.15 Pohyb pomocí kompasu
Obr.5.16 Zakótovaný profil k tělesu Obr.5.17 Výsledná geometrie
5.2.7
12
12
strana 36 5 Zásady a problémy konstrukce v CAD systému Catia v5
hotovou geometrii. Takto zakótovaný profil je pevně vázán k objemovému tělesu, a pokud měníme jeho polohu, měníme tím i polohu profilu Obr.5.18. To je v mnoha případech pro návrh nevhodné. Pokud je třeba provést zakótování k objemovému tělesu a současně zakótovaný profil nemá mít vazbu na objemové těleso, je třeba dané hrany objemového tělesa, ke kterému potřebujeme
kótovat, promítnout bez historie ( Create Datum) do Sketcher a následně promítnuté
hrany převést pomocí funkce
Construction/Standart Element na konstrukční element s provedením vazby Fix . Následně k takto izolované geometrii můžeme provést zakótování viz Obr.5.19. Pohyb a změny geometrie nemají vliv na náš profil Obr.5.20.
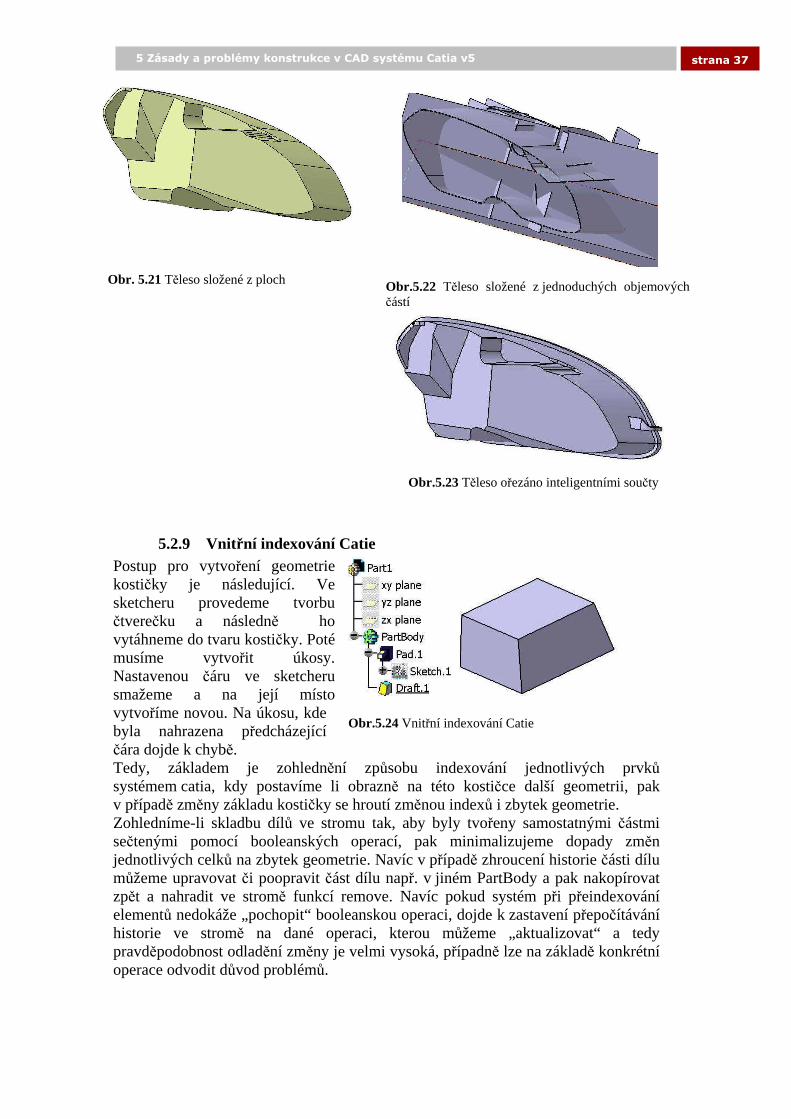
5.2.8 Tvorba složitějších těles z jednodušších Pokud je to možné, tak objemová tělesa složit z několika jednoduchých objemových prvků a ty pak upravit pomocí logických operací. Toto řešení, které je sice v mnoha případech časově náročnější (něž například danou geometrii vytvořit z ploch a těm přiřadit objem pomocí Thickness Obr.5.21), umožňuje však snadno provádět změny, v některých případech má i kvalitnější geometrii Obr.5.22 a Obr.5.23. .
Obr.5.19 Fixní konstrukční geometrie Obr.5.20 Profil se nepohybuje s pohybem tělesa
Obr.5.18 Profil se pohybuje s pohybem tělesa
5.2.8
11
11
strana 37 5 Zásady a problémy konstrukce v CAD systému Catia v5
5.2.9 Vnit řní indexování Catie Postup pro vytvoření geometrie kostičky je následující. Ve sketcheru provedeme tvorbu čtverečku a následně ho vytáhneme do tvaru kostičky. Poté musíme vytvořit úkosy. Nastavenou čáru ve sketcheru smažeme a na její místo vytvoříme novou. Na úkosu, kde byla nahrazena předcházející čára dojde k chybě. Tedy, základem je zohlednění způsobu indexování jednotlivých prvků systémem catia, kdy postavíme li obrazně na této kostičce další geometrii, pak v případě změny základu kostičky se hroutí změnou indexů i zbytek geometrie. Zohledníme-li skladbu dílů ve stromu tak, aby byly tvořeny samostatnými částmi sečtenými pomocí booleanských operací, pak minimalizujeme dopady změn jednotlivých celků na zbytek geometrie. Navíc v případě zhroucení historie části dílu můžeme upravovat či poopravit část dílu např. v jiném PartBody a pak nakopírovat zpět a nahradit ve stromě funkcí remove. Navíc pokud systém při přeindexování elementů nedokáže „pochopit“ booleanskou operaci, dojde k zastavení přepočítávání historie ve stromě na dané operaci, kterou můžeme „aktualizovat“ a tedy pravděpodobnost odladění změny je velmi vysoká, případně lze na základě konkrétní operace odvodit důvod problémů.
Obr.5.22 Těleso složené z jednoduchých objemových částí
Obr. 5.21 Těleso složené z ploch
Obr.5.23 Těleso ořezáno inteligentními součty
Obr.5.24 Vnitřní indexování Catie
12
12
strana 38 6 Tvorba světlometu
6 Tvorba světlometu
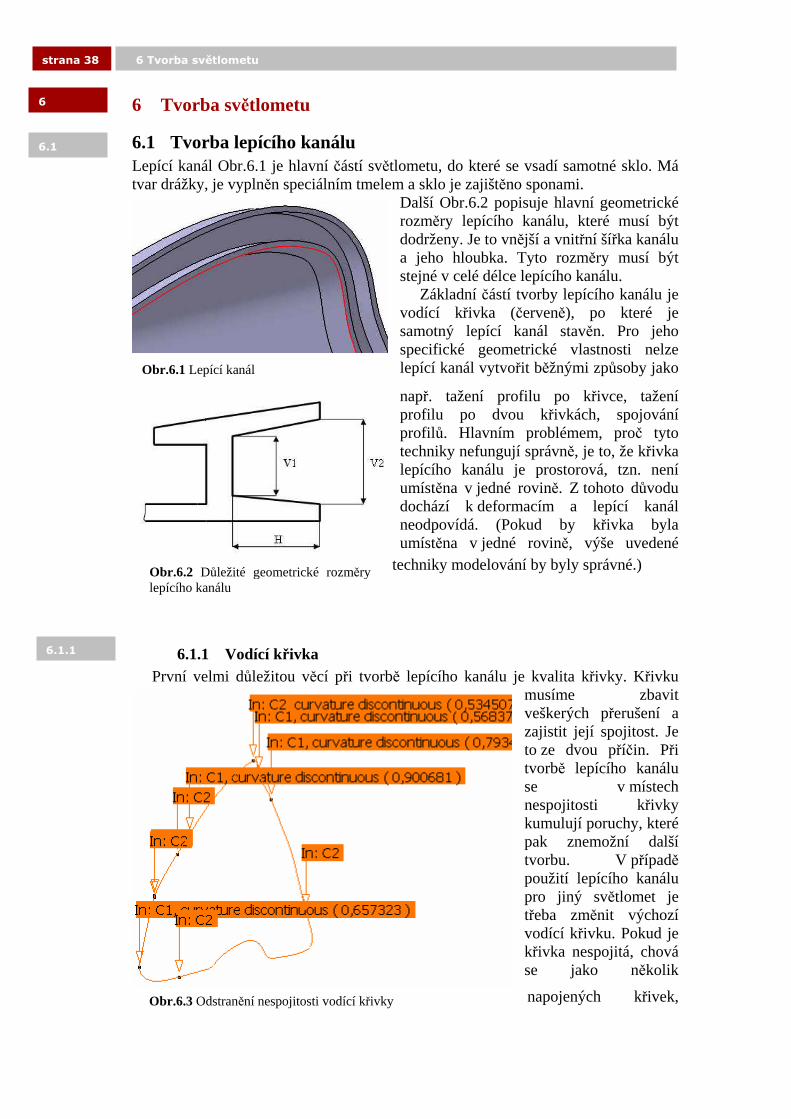
6.1 Tvorba lepícího kanálu Lepící kanál Obr.6.1 je hlavní částí světlometu, do které se vsadí samotné sklo. Má tvar drážky, je vyplněn speciálním tmelem a sklo je zajištěno sponami.
Další Obr.6.2 popisuje hlavní geometrické rozměry lepícího kanálu, které musí být dodrženy. Je to vnější a vnitřní šířka kanálu a jeho hloubka. Tyto rozměry musí být stejné v celé délce lepícího kanálu. Základní částí tvorby lepícího kanálu je vodící křivka (červeně), po které je samotný lepící kanál stavěn. Pro jeho specifické geometrické vlastnosti nelze lepící kanál vytvořit běžnými způsoby jako
např. tažení profilu po křivce, tažení profilu po dvou křivkách, spojování profilů. Hlavním problémem, proč tyto techniky nefungují správně, je to, že křivka lepícího kanálu je prostorová, tzn. není umístěna v jedné rovině. Z tohoto důvodu dochází k deformacím a lepící kanál neodpovídá. (Pokud by křivka byla umístěna v jedné rovině, výše uvedené
techniky modelování by byly správné.)
6.1.1 Vodící křivka První velmi důležitou věcí při tvorbě lepícího kanálu je kvalita křivky. Křivku
musíme zbavit veškerých přerušení a zajistit její spojitost. Je to ze dvou příčin. Při tvorbě lepícího kanálu se v místech nespojitosti křivky kumulují poruchy, které pak znemožní další tvorbu. V případě použití lepícího kanálu pro jiný světlomet je třeba změnit výchozí vodící křivku. Pokud je křivka nespojitá, chová se jako několik
napojených křivek, Obr.6.3 Odstranění nespojitosti vodící křivky
Obr.6.2 Důležité geometrické rozměry lepícího kanálu
Obr.6.1 Lepící kanál
6
6.1
6.1.1
11
11
strana 39 6 Tvorba světlometu
tzn. při jejich výměně se lepící kanál překreslí pouze na jedné z těchto křivek a zbylá část se již nevykreslí. Jestliže je křivka spojitá, k těmto problémům nedochází. Na Obr.6.3 je vidět křivka lepícího kanálu, kterou odstraníme nespojitosti
pomocí funkce Curve Smooth. Je jasné, že tato křivka má nespojitosti v několika bodech. V závorce je vyznačena jejich hodnota. Nespojitosti mohou být jak křivostní, tak i tangentní. Může se stát dokonce, že křivka se nenapojuje vůbec a v tom případě se zobrazí vzdálenost mezi konci. Obr.6.4 zobrazuje dialogový panel. Jednotlivé hodnoty vyjadřují mezní hodnotu daného typu nespojitosti, kterou opraví. Tyto hodnoty musí být nižší než hodnoty, které chceme opravit. Pokud toto splníme, v daných bodech se nespojitosti odstraní a křivka se stává v celé své délce spojitá. Tento proces je vhodné dělat bez historie. Tak dostaneme na ničem nezávislou křivku, se kterou můžeme pracovat dle potřeby.
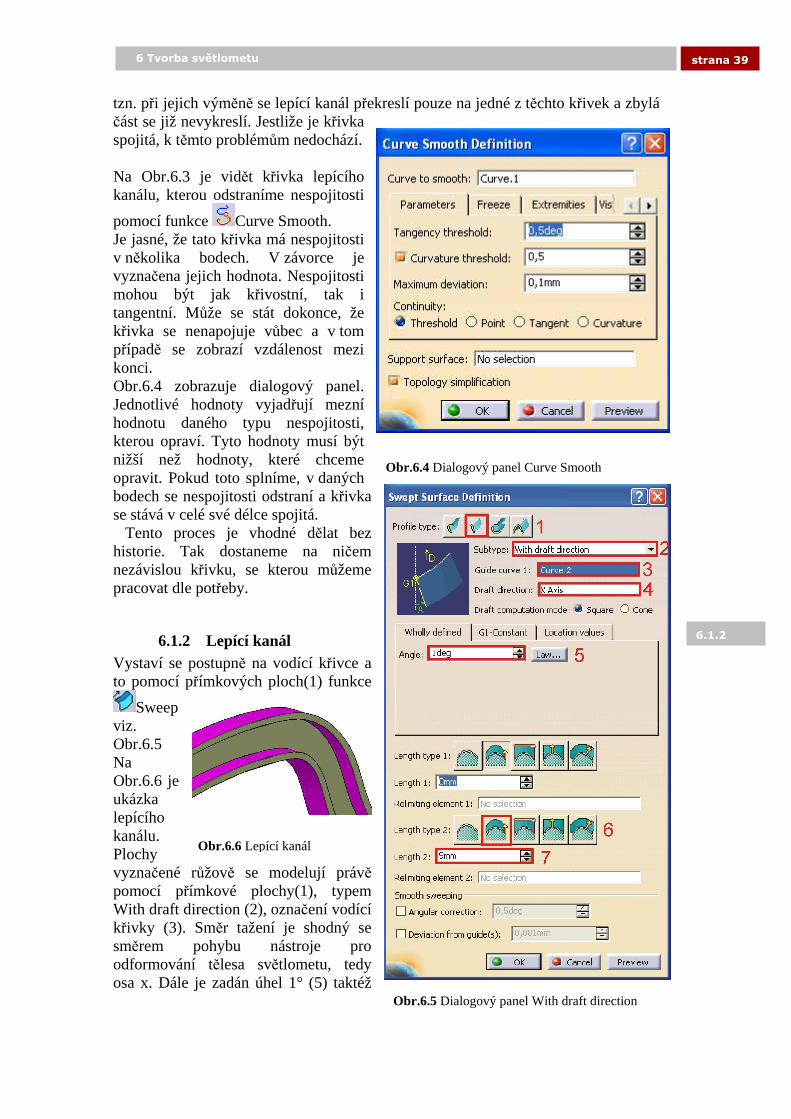
6.1.2 Lepící kanál Vystaví se postupně na vodící křivce a to pomocí přímkových ploch(1) funkce
Sweep viz. Obr.6.5 Na Obr.6.6 je ukázka lepícího kanálu. Plochy vyznačené růžově se modelují právě pomocí přímkové plochy(1), typem With draft direction (2), označení vodící křivky (3). Směr tažení je shodný se směrem pohybu nástroje pro odformování tělesa světlometu, tedy osa x. Dále je zadán úhel 1° (5) taktéž
Obr.6.5 Dialogový panel With draft direction
Obr.6.6 Lepící kanál
Obr.6.4 Dialogový panel Curve Smooth
6.1.2
12
12
strana 40 6 Tvorba světlometu
Obr.6.8 Dialogový panel With reference surface
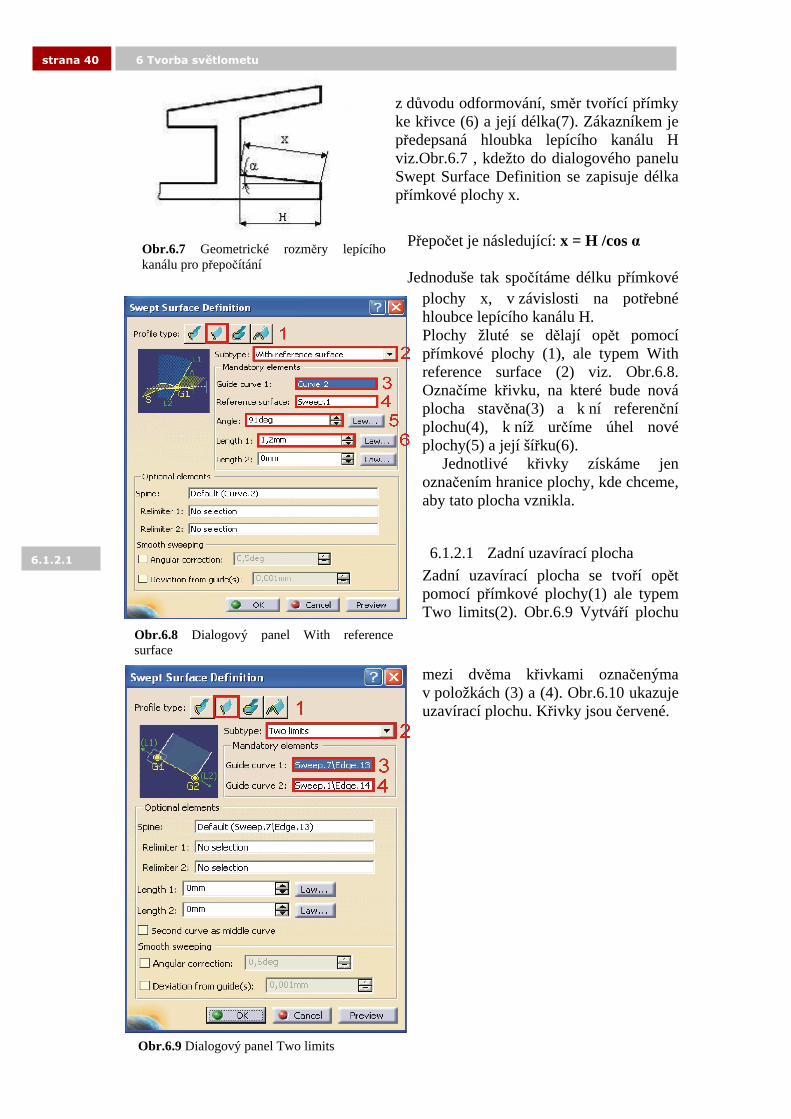
z důvodu odformování, směr tvořící přímky ke křivce (6) a její délka(7). Zákazníkem je předepsaná hloubka lepícího kanálu H viz.Obr.6.7 , kdežto do dialogového panelu Swept Surface Definition se zapisuje délka přímkové plochy x.
Přepočet je následující: x = H /cos α Jednoduše tak spočítáme délku přímkové
plochy x, v závislosti na potřebné hloubce lepícího kanálu H. Plochy žluté se dělají opět pomocí přímkové plochy (1), ale typem With reference surface (2) viz. Obr.6.8. Označíme křivku, na které bude nová plocha stavěna(3) a k ní referenční plochu(4), k níž určíme úhel nové plochy(5) a její šířku(6). Jednotlivé křivky získáme jen označením hranice plochy, kde chceme, aby tato plocha vznikla.
6.1.2.1 Zadní uzavírací plocha
Zadní uzavírací plocha se tvoří opět pomocí přímkové plochy(1) ale typem Two limits(2). Obr.6.9 Vytváří plochu
mezi dvěma křivkami označenýma v položkách (3) a (4). Obr.6.10 ukazuje uzavírací plochu. Křivky jsou červené.
Obr.6.7 Geometrické rozměry lepícího kanálu pro přepočítání
Obr.6.9 Dialogový panel Two limits
6.1.2.1

11
11
strana 41 6 Tvorba světlometu
Jakmile je lepící kanál složen, provede se jeho převedení na objemové těleso.
Nejprve se plochy tvořící lepící kanál spojí pomocí funkce Join. Ta nahradí několik stávajících ploch novou plochou, kterou uzavřeme do objemu funkcí
Close Surface. Na zadní části lepícího kanálu se ještě vytváří osazení na Obr.6.11 modře, pro zajištění sponek držících sklo. Takto vytvořený lepící kanál můžeme kdykoli modifikovat a to jak pomocí změn úhlů a velikostí přímkových ploch, tak i záměnou vodící křivky. Jednoduchým způsobem tak dostaneme nový lepící kanál, který se může použít na jiný světlomet.
6.1.2.2 Modifikace lepícího kanálu změnou vodící křivky
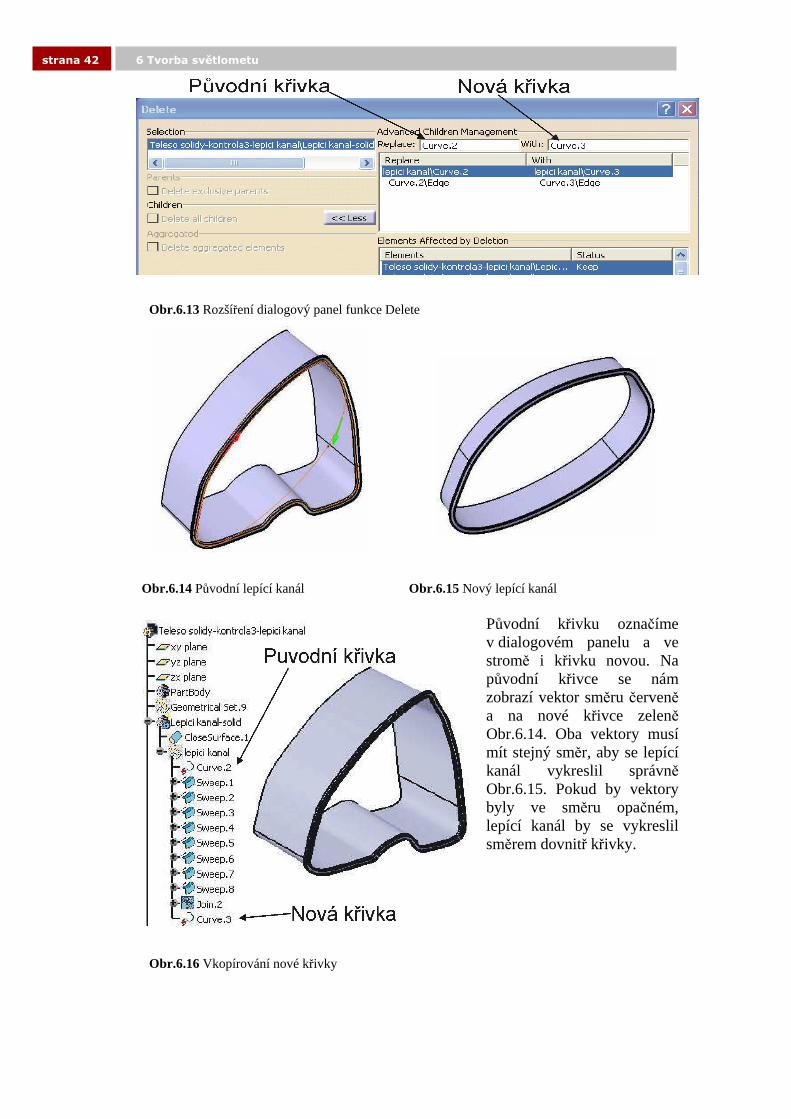
Je to důležitá část, kdy se využije parametrizace pro rychlou konstrukci nového nebo změnu stávajícího lepícího kanálu. Nejprve vkopírujeme novou křivku do stromu, a to nejlépe do stejného Open body, kde je křivka původní Obr.6.16. Původní křivku označíme a smažeme. Zobrazí se nám dialogový panel Obr.6.12. Odstraníme zaškrtnutí Delete all chidren, což znamená, že při odstranění původní křivky nebude
zbývající geometrie, která je na ni závislá odstraněna. Zmáčkneme tlačítko More. Dialogový panel se tím rozšíří o více funkcí Obr.6.13.
Obr. 6.12 Dialogový panel Delete
Obr.6.10 Uzavírací plocha Obr.6.11 Osazení na lepícím kanálu
6.1.2.2
12
12
strana 42 6 Tvorba světlometu
Původní křivku označíme v dialogovém panelu a ve stromě i křivku novou. Na původní křivce se nám zobrazí vektor směru červeně a na nové křivce zeleně Obr.6.14. Oba vektory musí mít stejný směr, aby se lepící kanál vykreslil správně Obr.6.15. Pokud by vektory byly ve směru opačném, lepící kanál by se vykreslil směrem dovnitř křivky.
Obr.6.15 Nový lepící kanál
Obr.6.16 Vkopírování nové křivky
Obr.6.13 Rozšíření dialogový panel funkce Delete
Obr.6.14 Původní lepící kanál
11
11
strana 43 6 Tvorba světlometu
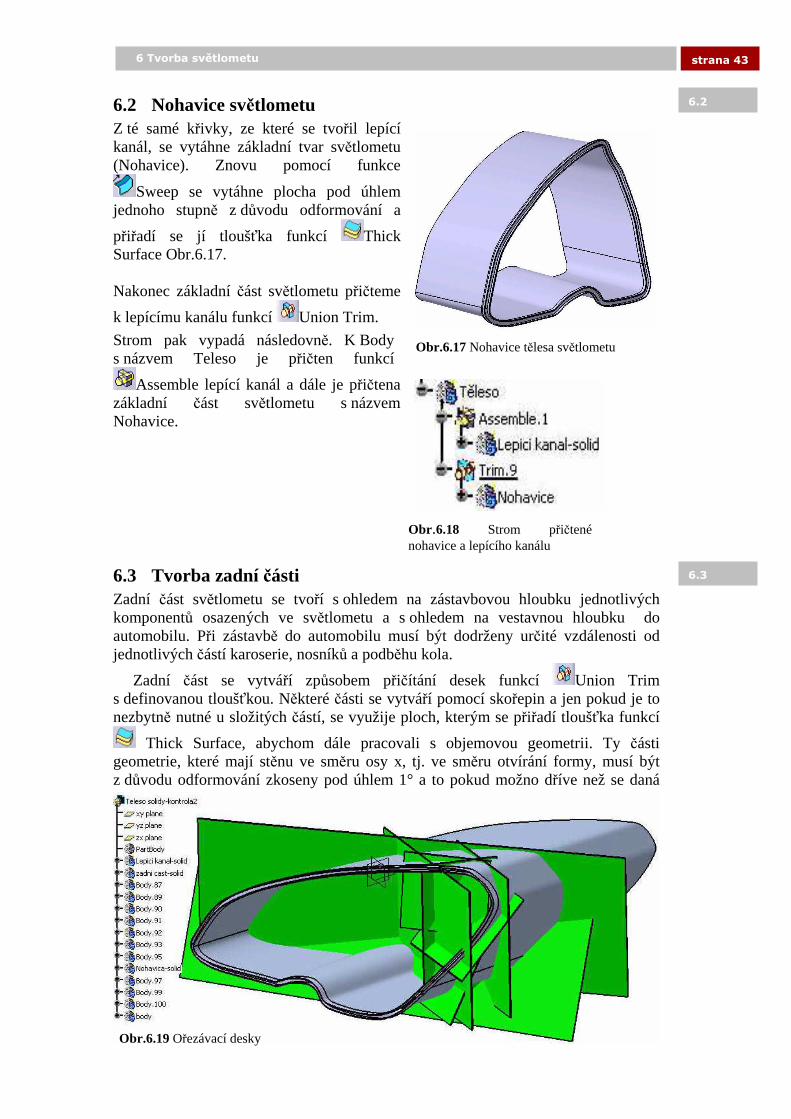
6.2 Nohavice světlometu Z té samé křivky, ze které se tvořil lepící kanál, se vytáhne základní tvar světlometu (Nohavice). Znovu pomocí funkce
Sweep se vytáhne plocha pod úhlem jednoho stupně z důvodu odformování a
přiřadí se jí tloušťka funkcí Thick Surface Obr.6.17. Nakonec základní část světlometu přičteme
k lepícímu kanálu funkcí Union Trim.
Strom pak vypadá následovně. K Body s názvem Teleso je přičten funkcí
Assemble lepící kanál a dále je přičtena základní část světlometu s názvem Nohavice.
6.3 Tvorba zadní části Zadní část světlometu se tvoří s ohledem na zástavbovou hloubku jednotlivých komponentů osazených ve světlometu a s ohledem na vestavnou hloubku do automobilu. Při zástavbě do automobilu musí být dodrženy určité vzdálenosti od jednotlivých částí karoserie, nosníků a podběhu kola.
Zadní část se vytváří způsobem přičítání desek funkcí Union Trim s definovanou tloušťkou. Některé části se vytváří pomocí skořepin a jen pokud je to nezbytně nutné u složitých částí, se využije ploch, kterým se přiřadí tloušťka funkcí
Thick Surface, abychom dále pracovali s objemovou geometrii. Ty části geometrie, které mají stěnu ve směru osy x, tj. ve směru otvírání formy, musí být z důvodu odformování zkoseny pod úhlem 1° a to pokud možno dříve než se daná
Obr.6.19 Ořezávací desky
Obr .6.18 Strom přičtené nohavice a lepícího kanálu
Obr.6.17 Nohavice tělesa světlometu
6.2
6.3
12
12
strana 44 6 Tvorba světlometu
geometrie přičte. Všechny tyto části (desky, skořepiny) musí být vytvořeny bez vazby na
jakýkoli souřadný
systém, nebo jinou geometrii, aby byl možný jejich posun
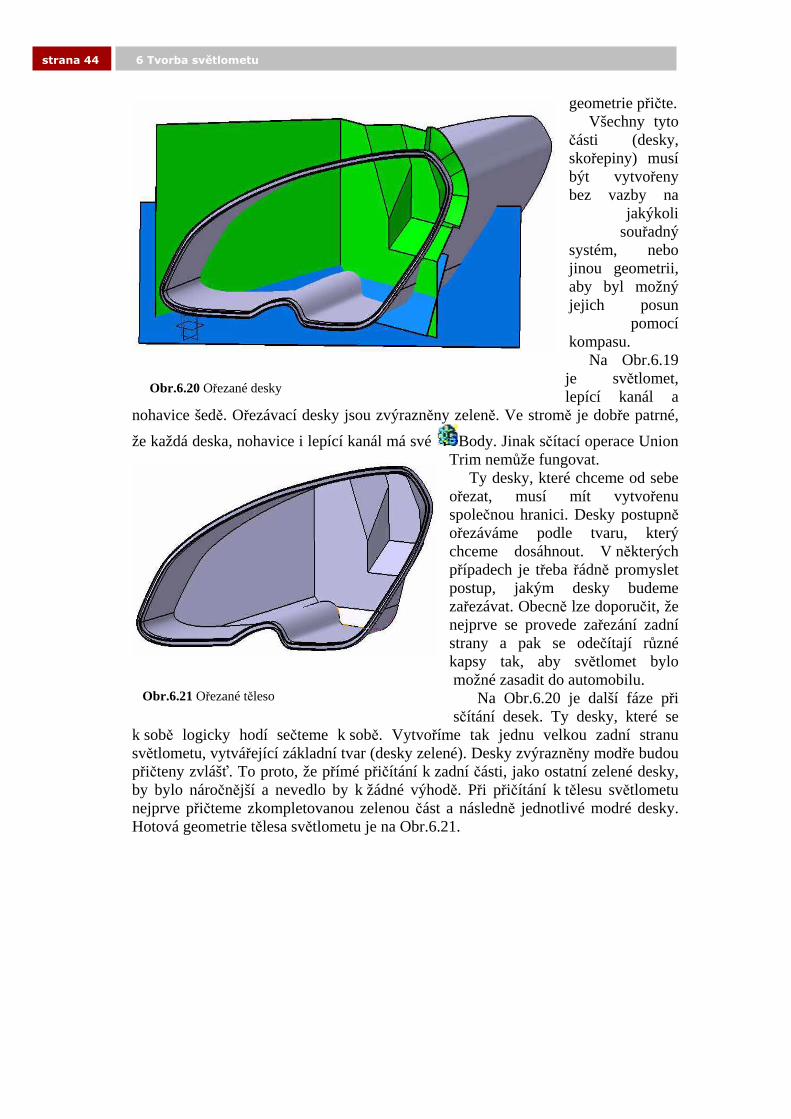
pomocí kompasu. Na Obr.6.19 je světlomet, lepící kanál a
nohavice šedě. Ořezávací desky jsou zvýrazněny zeleně. Ve stromě je dobře patrné,
že každá deska, nohavice i lepící kanál má své Body. Jinak sčítací operace Union Trim nemůže fungovat. Ty desky, které chceme od sebe ořezat, musí mít vytvořenu společnou hranici. Desky postupně ořezáváme podle tvaru, který chceme dosáhnout. V některých případech je třeba řádně promyslet postup, jakým desky budeme zařezávat. Obecně lze doporučit, že nejprve se provede zařezání zadní strany a pak se odečítají různé kapsy tak, aby světlomet bylo možné zasadit do automobilu. Na Obr.6.20 je další fáze při sčítání desek. Ty desky, které se
k sobě logicky hodí sečteme k sobě. Vytvoříme tak jednu velkou zadní stranu světlometu, vytvářející základní tvar (desky zelené). Desky zvýrazněny modře budou přičteny zvlášť. To proto, že přímé přičítání k zadní části, jako ostatní zelené desky, by bylo náročnější a nevedlo by k žádné výhodě. Při přičítání k tělesu světlometu nejprve přičteme zkompletovanou zelenou část a následně jednotlivé modré desky. Hotová geometrie tělesa světlometu je na Obr.6.21.
Obr.6.21 Ořezané těleso
Obr.6.20 Ořezané desky
11
11
strana 45 6 Tvorba světlometu
Obr.6.22 Odečítané kapsy
Obr.6.22 Těleso s odečtenými kapsami
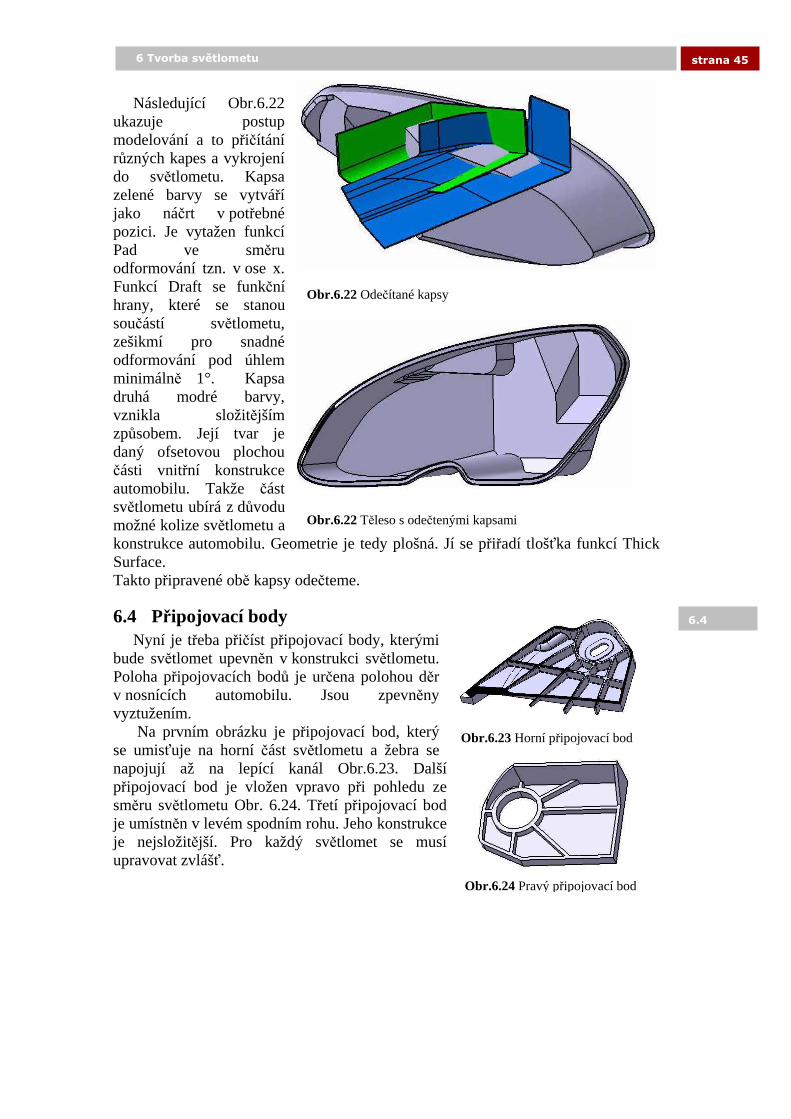
Obr.6.24 Pravý připojovací bod
Následující Obr.6.22 ukazuje postup modelování a to přičítání různých kapes a vykrojení do světlometu. Kapsa zelené barvy se vytváří jako náčrt v potřebné pozici. Je vytažen funkcí Pad ve směru odformování tzn. v ose x. Funkcí Draft se funkční hrany, které se stanou součástí světlometu, zešikmí pro snadné odformování pod úhlem minimálně 1°. Kapsa druhá modré barvy, vznikla složitějším způsobem. Její tvar je daný ofsetovou plochou části vnitřní konstrukce automobilu. Takže část světlometu ubírá z důvodu možné kolize světlometu a konstrukce automobilu. Geometrie je tedy plošná. Jí se přiřadí tlošťka funkcí Thick Surface. Takto připravené obě kapsy odečteme.
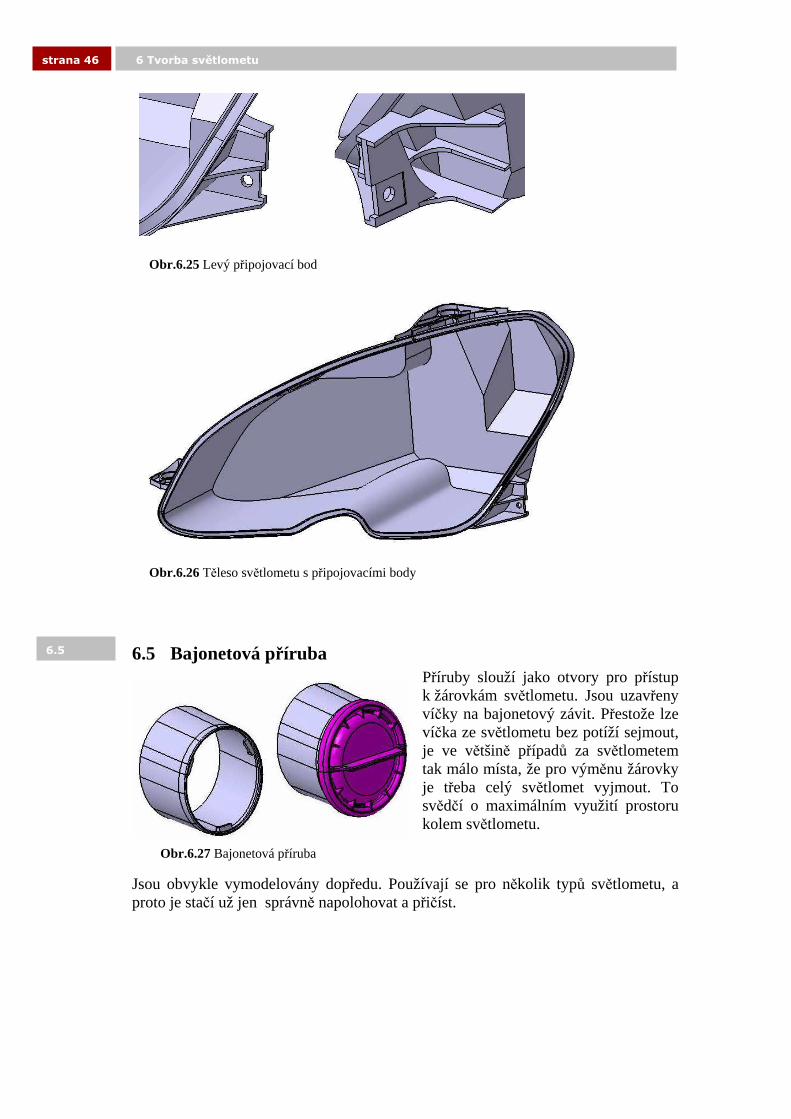
6.4 Připojovací body Nyní je třeba přičíst připojovací body, kterými bude světlomet upevněn v konstrukci světlometu. Poloha připojovacích bodů je určena polohou děr v nosnících automobilu. Jsou zpevněny vyztužením. Na prvním obrázku je připojovací bod, který se umisťuje na horní část světlometu a žebra se napojují až na lepící kanál Obr.6.23. Další připojovací bod je vložen vpravo při pohledu ze směru světlometu Obr. 6.24. Třetí připojovací bod je umístněn v levém spodním rohu. Jeho konstrukce je nejsložitější. Pro každý světlomet se musí upravovat zvlášť.
Obr.6.23 Horní připojovací bod
6.4
12
12
strana 46 6 Tvorba světlometu
6.5 Bajonetová příruba Příruby slouží jako otvory pro přístup k žárovkám světlometu. Jsou uzavřeny víčky na bajonetový závit. Přestože lze víčka ze světlometu bez potíží sejmout, je ve většině případů za světlometem tak málo místa, že pro výměnu žárovky je třeba celý světlomet vyjmout. To svědčí o maximálním využití prostoru kolem světlometu.
Jsou obvykle vymodelovány dopředu. Používají se pro několik typů světlometu, a proto je stačí už jen správně napolohovat a přičíst.
Obr.6.26 Těleso světlometu s připojovacími body
Obr.6.27 Bajonetová příruba
Obr.6.25 Levý připojovací bod
6.5
11
11
strana 47 6 Tvorba světlometu
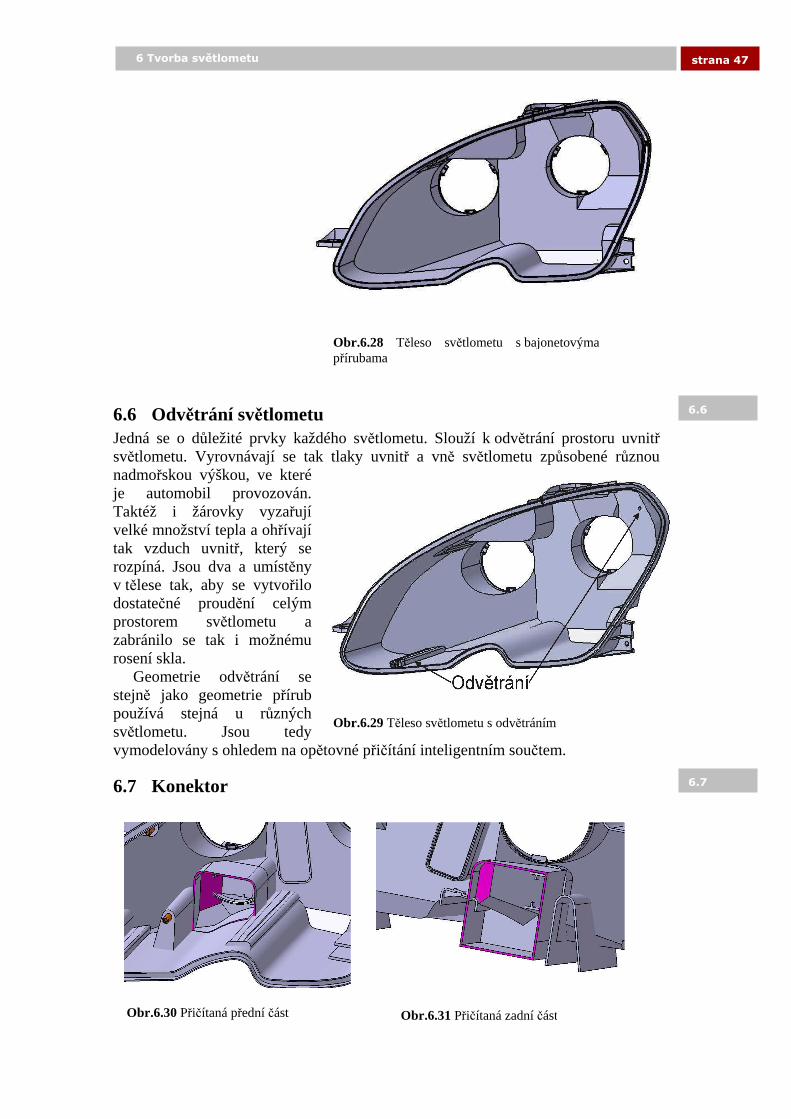
6.6 Odvětrání světlometu Jedná se o důležité prvky každého světlometu. Slouží k odvětrání prostoru uvnitř světlometu. Vyrovnávají se tak tlaky uvnitř a vně světlometu způsobené různou nadmořskou výškou, ve které je automobil provozován. Taktéž i žárovky vyzařují velké množství tepla a ohřívají tak vzduch uvnitř, který se rozpíná. Jsou dva a umístěny v tělese tak, aby se vytvořilo dostatečné proudění celým prostorem světlometu a zabránilo se tak i možnému rosení skla. Geometrie odvětrání se stejně jako geometrie přírub používá stejná u různých světlometu. Jsou tedy vymodelovány s ohledem na opětovné přičítání inteligentním součtem.
6.7 Konektor
Obr.6.28 Těleso světlometu s bajonetovýma přírubama
Obr.6.29 Těleso světlometu s odvětráním
Obr.6.31 Přičítaná zadní část Obr.6.30 Přičítaná přední část
6.6
6.7
12
12
strana 48 6 Tvorba světlometu
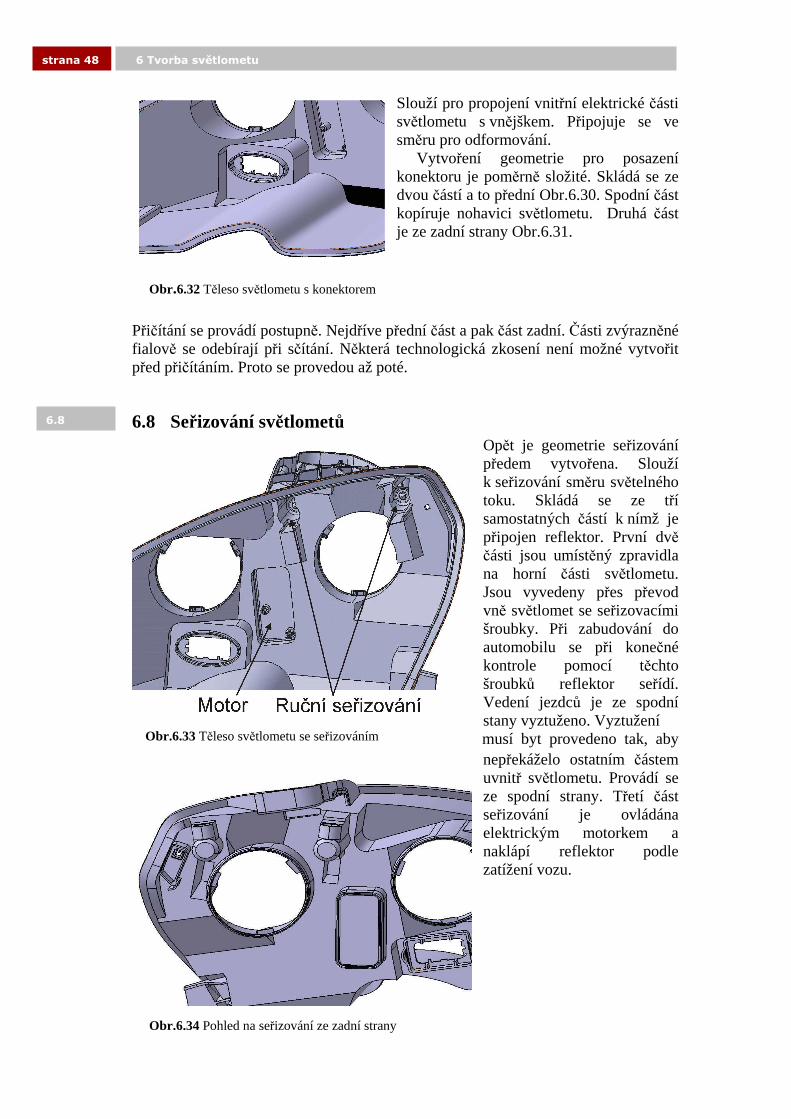
Slouží pro propojení vnitřní elektrické části světlometu s vnějškem. Připojuje se ve směru pro odformování. Vytvoření geometrie pro posazení konektoru je poměrně složité. Skládá se ze dvou částí a to přední Obr.6.30. Spodní část kopíruje nohavici světlometu. Druhá část je ze zadní strany Obr.6.31.
Přičítání se provádí postupně. Nejdříve přední část a pak část zadní. Části zvýrazněné fialově se odebírají při sčítání. Některá technologická zkosení není možné vytvořit před přičítáním. Proto se provedou až poté.
6.8 Seřizování světlometů Opět je geometrie seřizování předem vytvořena. Slouží k seřizování směru světelného toku. Skládá se ze tří samostatných částí k nímž je připojen reflektor. První dvě části jsou umístěný zpravidla na horní části světlometu. Jsou vyvedeny přes převod vně světlomet se seřizovacími šroubky. Při zabudování do automobilu se při konečné kontrole pomocí těchto šroubků reflektor seřídí. Vedení jezdců je ze spodní stany vyztuženo. Vyztužení musí byt provedeno tak, aby nepřekáželo ostatním částem uvnitř světlometu. Provádí se ze spodní strany. Třetí část seřizování je ovládána elektrickým motorkem a naklápí reflektor podle zatížení vozu.
Obr.6.33 Těleso světlometu se seřizováním
Obr.6.34 Pohled na seřizování ze zadní strany
Obr .6.32 Těleso světlometu s konektorem
6.8
11
11
strana 49 6 Tvorba světlometu
Obr.6.35 Těleso světlometu
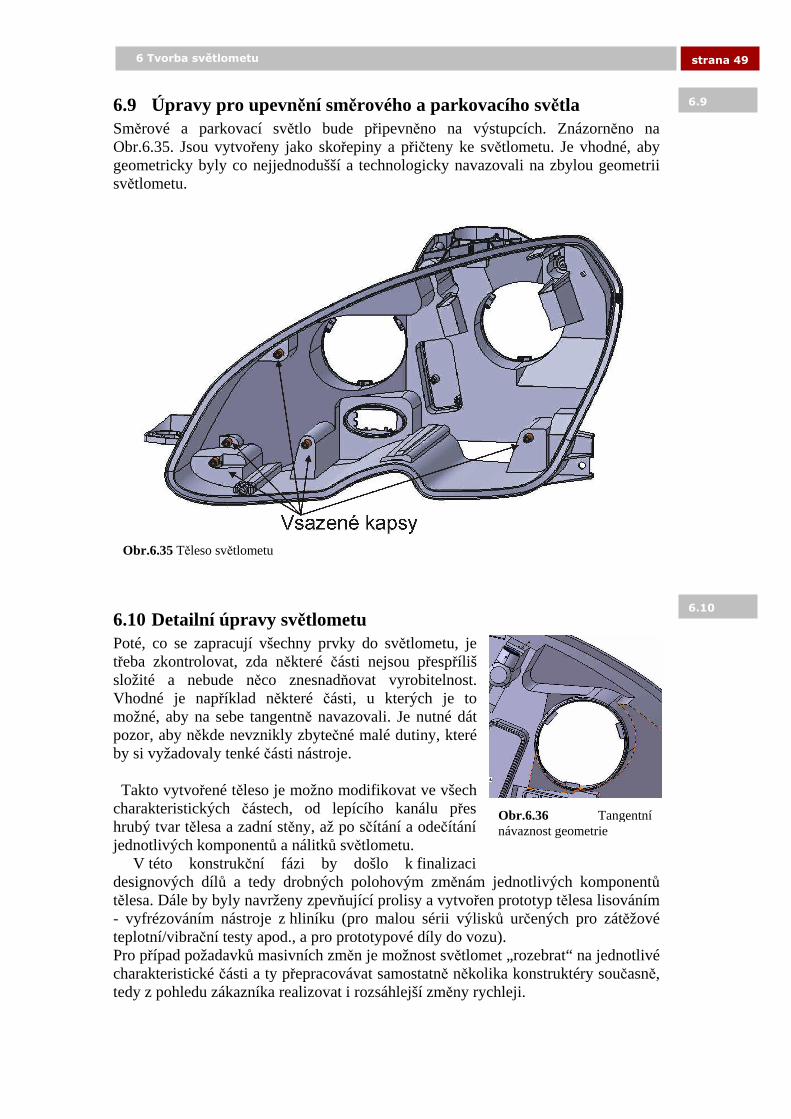
6.9 Úpravy pro upevnění směrového a parkovacího světla Směrové a parkovací světlo bude připevněno na výstupcích. Znázorněno na Obr.6.35. Jsou vytvořeny jako skořepiny a přičteny ke světlometu. Je vhodné, aby geometricky byly co nejjednodušší a technologicky navazovali na zbylou geometrii světlometu.
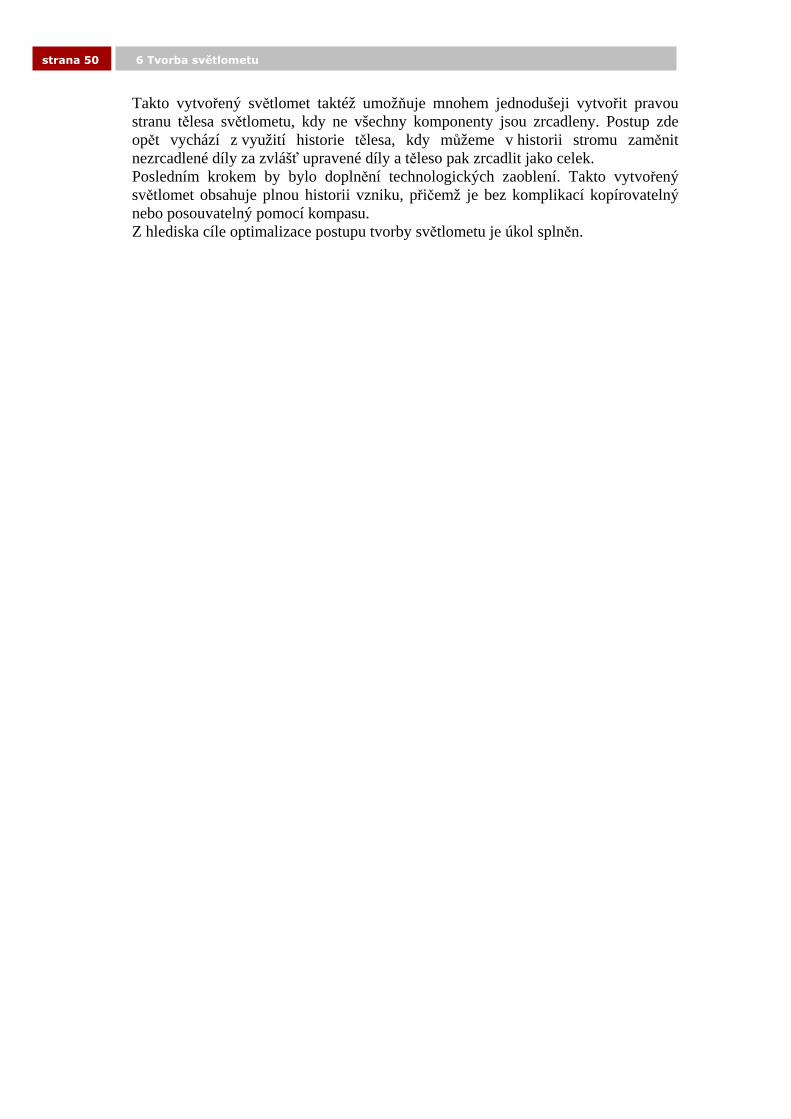
6.10 Detailní úpravy světlometu Poté, co se zapracují všechny prvky do světlometu, je třeba zkontrolovat, zda některé části nejsou přespříliš složité a nebude něco znesnadňovat vyrobitelnost. Vhodné je například některé části, u kterých je to možné, aby na sebe tangentně navazovali. Je nutné dát pozor, aby někde nevznikly zbytečné malé dutiny, které by si vyžadovaly tenké části nástroje. Takto vytvořené těleso je možno modifikovat ve všech charakteristických částech, od lepícího kanálu přes hrubý tvar tělesa a zadní stěny, až po sčítání a odečítání jednotlivých komponentů a nálitků světlometu. V této konstrukční fázi by došlo k finalizaci designových dílů a tedy drobných polohovým změnám jednotlivých komponentů tělesa. Dále by byly navrženy zpevňující prolisy a vytvořen prototyp tělesa lisováním - vyfrézováním nástroje z hliníku (pro malou sérii výlisků určených pro zátěžové teplotní/vibrační testy apod., a pro prototypové díly do vozu). Pro případ požadavků masivních změn je možnost světlomet „rozebrat“ na jednotlivé charakteristické části a ty přepracovávat samostatně několika konstruktéry současně, tedy z pohledu zákazníka realizovat i rozsáhlejší změny rychleji.
Obr.6.36 Tangentní návaznost geometrie
6.9
6.10
12
12
strana 50 6 Tvorba světlometu
Takto vytvořený světlomet taktéž umožňuje mnohem jednodušeji vytvořit pravou stranu tělesa světlometu, kdy ne všechny komponenty jsou zrcadleny. Postup zde opět vychází z využití historie tělesa, kdy můžeme v historii stromu zaměnit nezrcadlené díly za zvlášť upravené díly a těleso pak zrcadlit jako celek. Posledním krokem by bylo doplnění technologických zaoblení. Takto vytvořený světlomet obsahuje plnou historii vzniku, přičemž je bez komplikací kopírovatelný nebo posouvatelný pomocí kompasu. Z hlediska cíle optimalizace postupu tvorby světlometu je úkol splněn.
11
11
strana 51 Závěr
7 Závěr Jedním ze zásadních problémů této diplomové práci bylo nalézt a popsat cestu, jakým způsobem postupovat při návrhu světlometu. Veškeré problematické úkony jsou objasněny na jednotlivých jednoduchých příkladech a popsány tak, aby dobře daný problém vysvětlily. Tento postup slouží k snadnému a rychlému zvládnutí dané problematiky a k jednoduchému poznání. Na základě poznatků lze zvolit nejlépe vyhovující postup s alternativami pro a proti. Při samotném návrhu světlometu je vhodnější se držet již předem daných doporučení. Postup práce je nejdříve teoreticky přiblížen na prostých příkladech a následně aplikován přímo při návrhu tělesa světlometu. Důležitou částí světlometu je lepící kanál. Jeho tvorba je velmi složitá, náročná a zdlouhavá. V této práci se mi podařilo využít netradičního způsobu modelování lepícího kanálu a tím dosáhnout zefektivnění času a práce. Lepící kanál se lepe a rychleji modifikuje podle potřeb konstruktéra. Cílem diplomové práce nebylo objasnit popis obou modulů Catie, proto chce-li konstruktér využít zde popsaných informací, musí tyto moduly zvládat na dobré úrovni. Návaznost na moji práci vidím ve využití adaptivního modelování. Touto technikou by bylo možné docílit automatického přizpůsobování jednotlivých částí světlometu (např. změnou skla se upraví celý lepící kanál, změnou děr v nosnících automobilu se přizpůsobí upínací body na světlometu, změnou uchycení reflektoru se upraví seřizování reflektorů apod.).
7
12
12
strana 52 Seznam pramenů
8 Seznam pramenů
� Technocentrum CAD s.r.o., Technická dokumentace Catia v5r5, formát PDF
� Richard Cozzens, Brandon Griffiths, Southern Utah University, DCS Publication, Catia v5 Workbook release 3
� Help Catia v5r7, formát html
� Firemní materiály a prezentace firmy Automotive Lighting
� BEKO Engineering s.r.o. dodavatel PDM řešení Catia
http://www.catia.cz
� DYTRON s.r.o. prodejce CAD/CAM systému Catia www.dytron.cz
� Západočeská Univerzita v Plzni, Katedra konstruování strojů, studijní podklady Catia v5
http://www.kks.zcu.cz/podklady/CATIA/studentske
� TECHNODAT, CAE-systémy s.r.o. Dodavatel produktů Catia http://www.technodat.cz
� Technocentrum CAD s.r.o. Prodej software Catia http://www.tccad.cz
� Dassault Systemes, vývoj výrobku Catia http://www.3ds.com
� AV Engineering a.s. dodavatel inženýrských služeb http://www.aveng.com
� TPC, vývoj CAD systému Pro/engineer http://www.ptc.com
� UGS, vyvíjí a dodává CAD/CAM/CAE a PDM systémy NX http://www.ugs.com
� UGS, , vyvíjí a dodává CAD/CAM/CAE a PDM systémy NX http://www.ugs.cz
� EDS, vývoj CAD systému Unigraphics http://www.eds.com
� AIRON Technic, a.s., zástupce firmy ICEM Ltd. na českém trhu http://www.icem.cz
8

11
11
strana 53 Seznam pramenů
� ICEM Ltd. vývoj systému ICEM Surf http://www.icem.com
� SolidWorks Corporation, prodej CAD systému SolidWorks http://www.solidworks.cz
� Portál firmy 3E Praha Enginnering pro uživatele systému SolidWorks http://www.solidweb.cz
� Solid Vision, s.r.o., prodejce CAD systému SolidWorks http://www.solidvision.cz
� LANETE, spol s r.o., prodejce CAD systému SolidWorks http://www.lanete.cz
� Computer Design, časopis věnovaný CAx systémům http://www.cdesign.cz
� IT Cad, časopis věnovaný CAx systémům http://cad.ccb.cz
� Hella Autotechnik, s.r.o. výrobce světlometů v ČR http://www.hella.cz
� DEPO, výrobce světlometů http://www.depoautolamp.com
� Visteon, výrobce světlometů http://www.visteon.com
� Ostravské noviny, článek o firmě Visteon http://www.ostravskenoviny.cz/view.php?cisloclanku=2004072301
� Portál Tiskali, článek o firmě Visteon http://www.tiscali.cz/auto/auto_center_031120.669743.html
� Auto Kelly a.s., náhradní díly pro automobily http://www.autokelly.cz/dodavatele.php
� Valeo, výrobce světlometů http://www.valeo.com
� Koito czech s.r.o., výrobce světlometů v ČR http://www.koito-czech.cz
� on-line magazín deníku Právo a portálu Seznam.cz, článek o firmě Koito http://www.novinky.cz/03/31/90.html
12
12
strana 54 Seznam pramenů
� Samlip, výrobce světlometů http://www.samlip.co.kr
� Automotive Lighting, výrobce světlometů http://www.al-lighting.com
� Portál věnovaný automobilům www.auto.cz
� Isolit-Bravo spol, s.r.o., výrobce nástrojů pro výrobu světlometů http://www.isolit-bravo.cz/CZ/serv.htm

11
11
strana 55 9 Přílohy
9 Přílohy 9
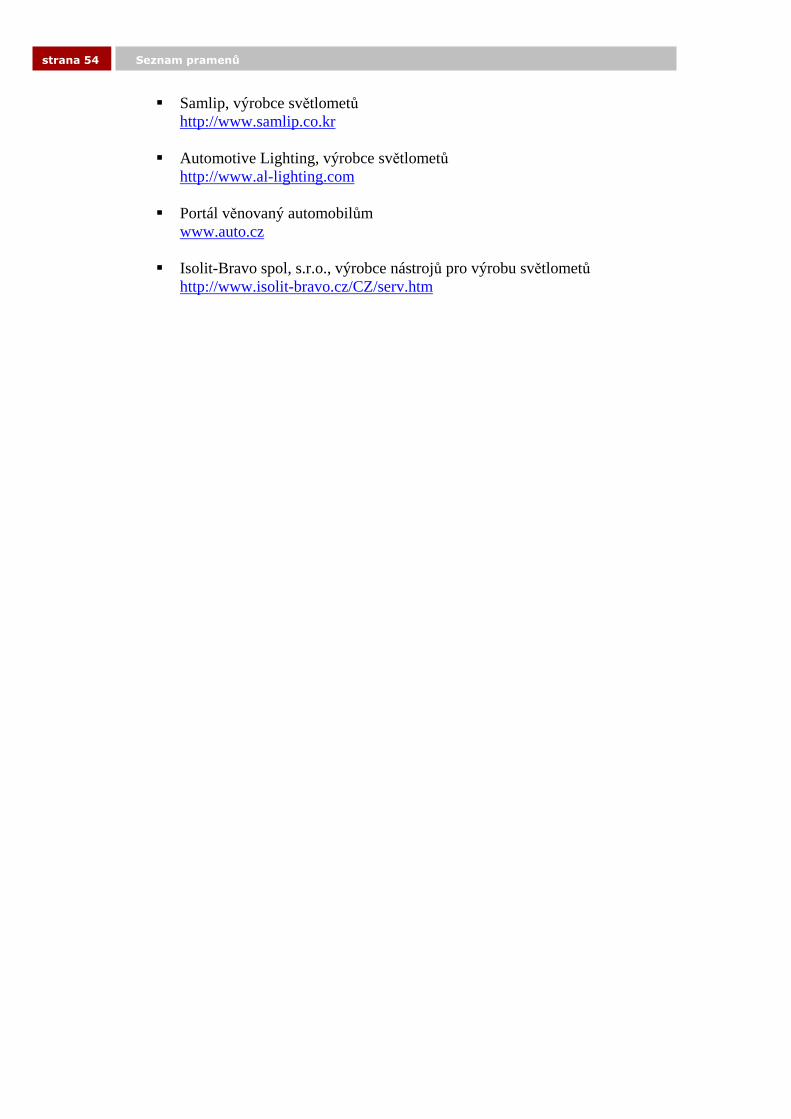
Příloha 1. Kompletní těleso světlometu i se stromovou strukturou

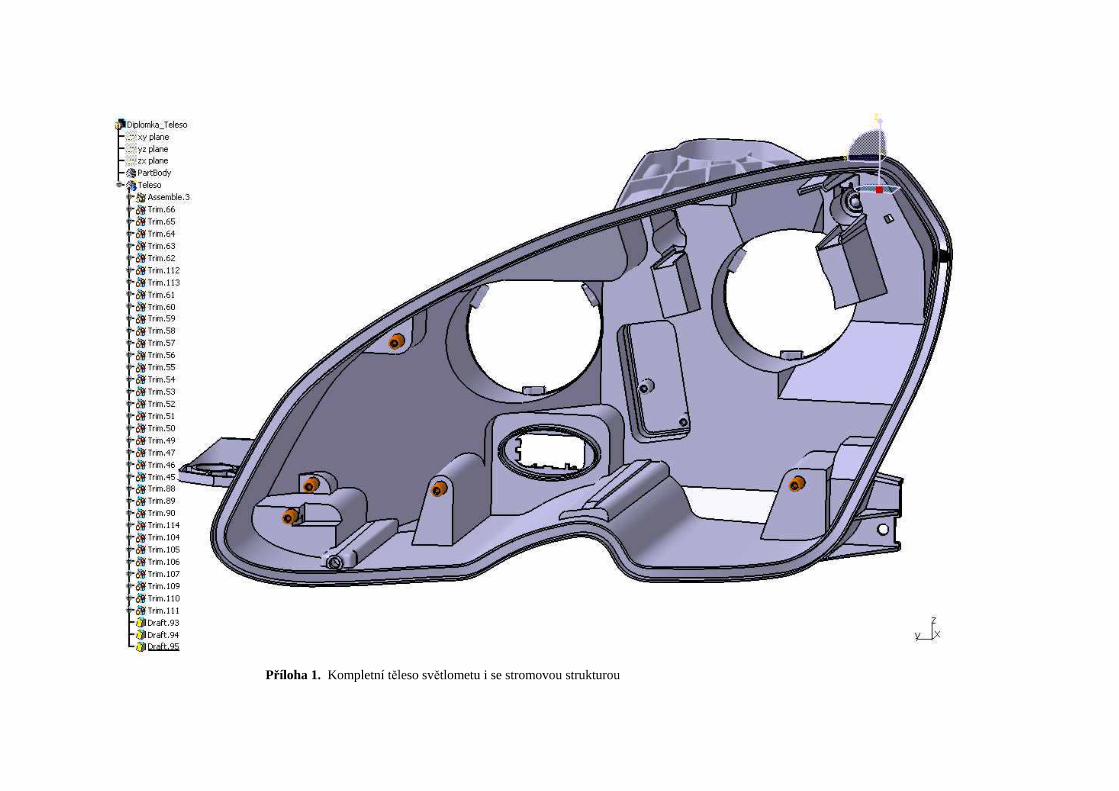
Příloha 2. Kompletní těleso světlometu – zadní pohled

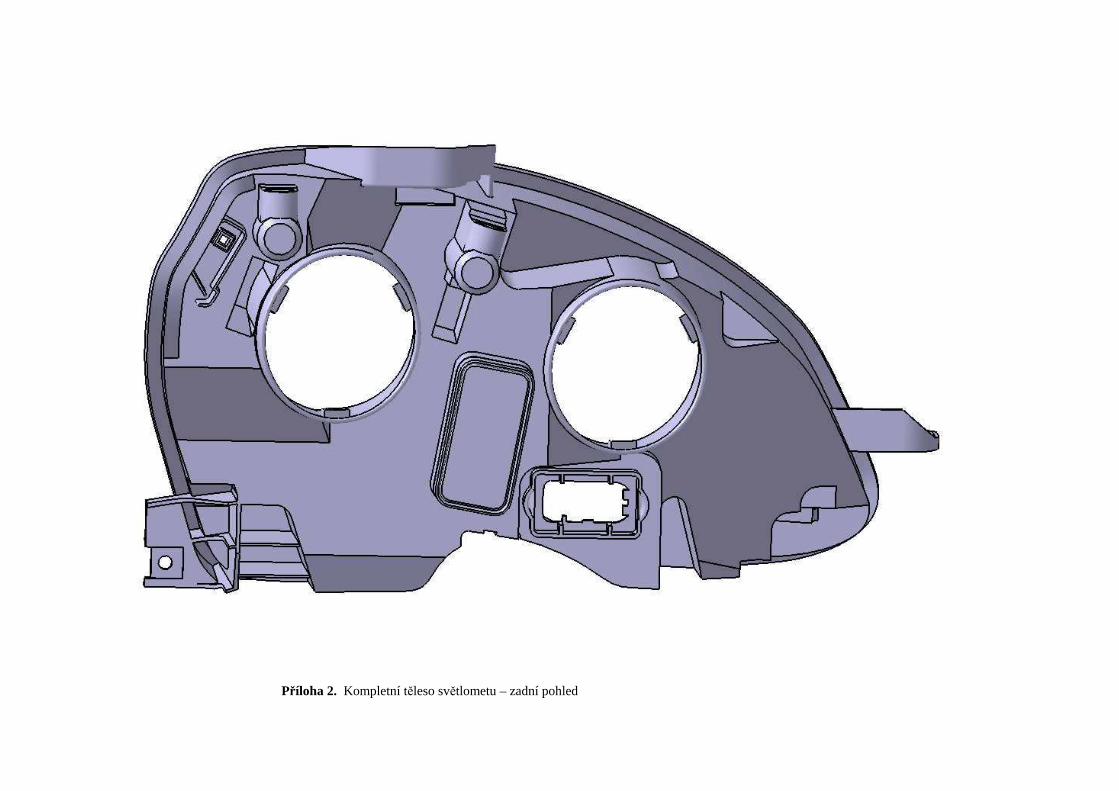
Příloha 3. Osazený světlomet

Příloha 4. Osazený světlomet – zadní pohled

Příloha 5. Světlomet vsazený v konstrukci automobilu

















