12
μ μ μProcesory a Robotika
µµµµProcesory a Robotika

Modelářské servomotory (serva)
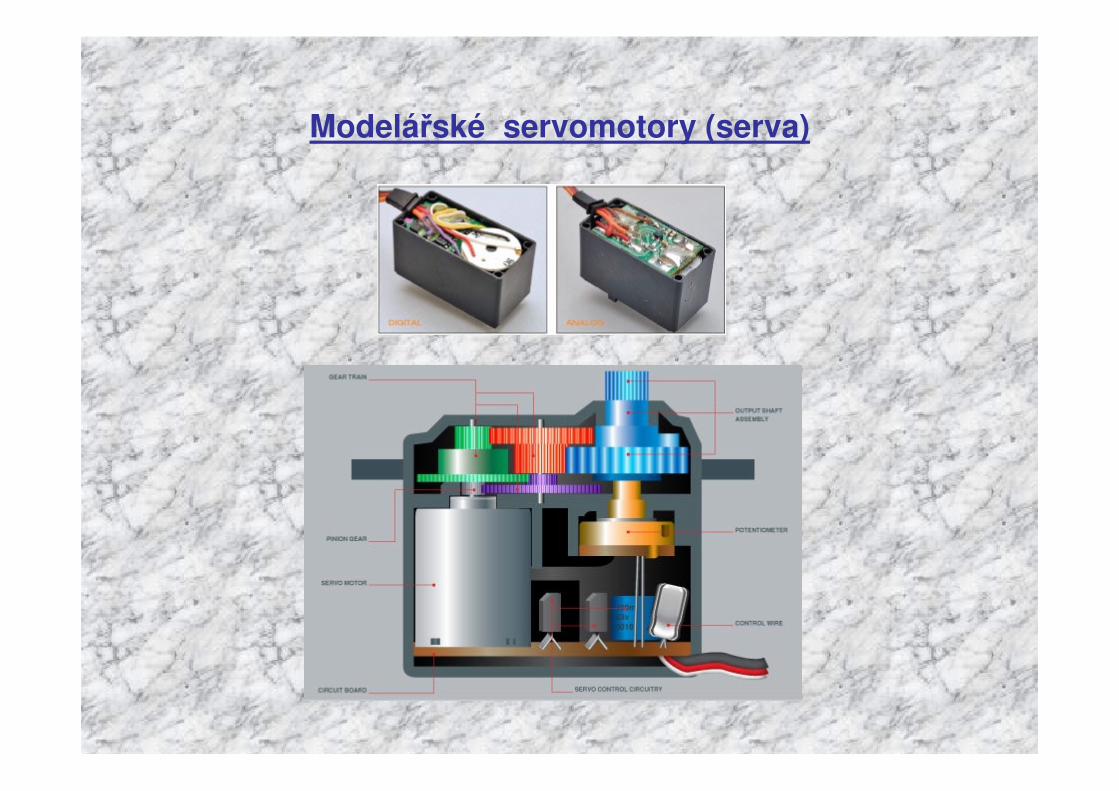
Modelářské servomotory (serva)
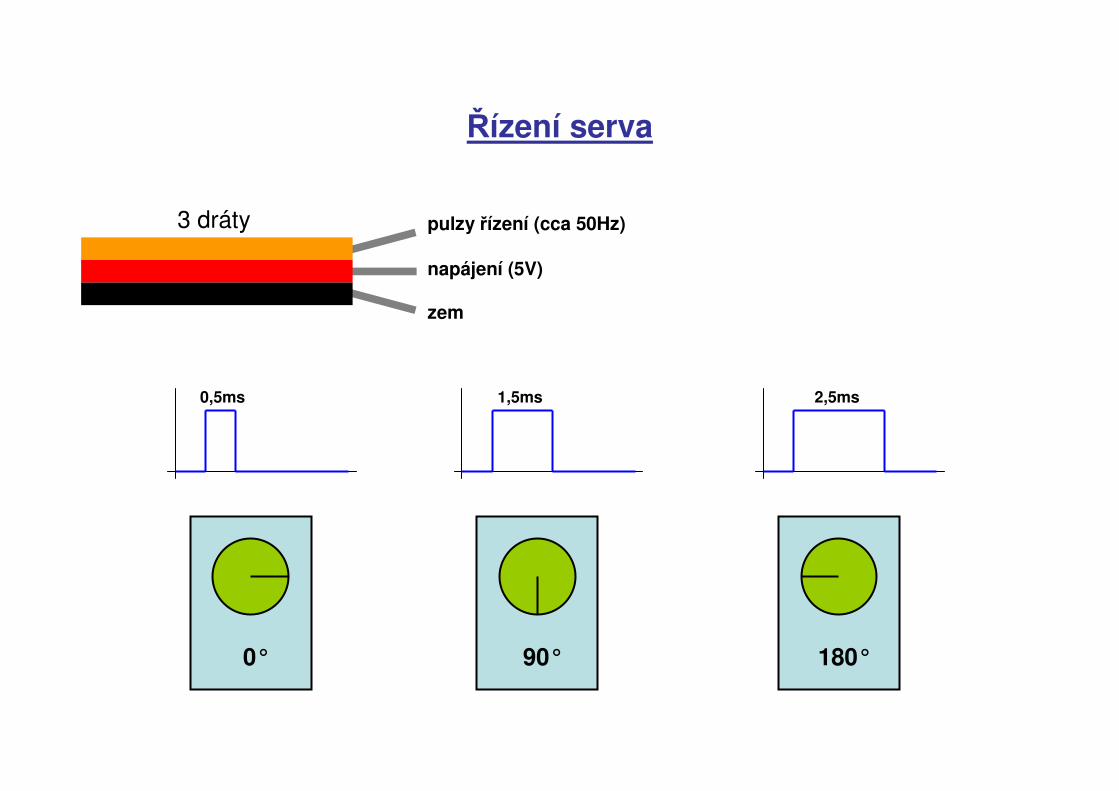
Řízení serva
3 dráty pulzy řízení (cca 50Hz)
napájení (5V)
zem
0,5ms
0°
1,5ms
90°
2,5ms
180°
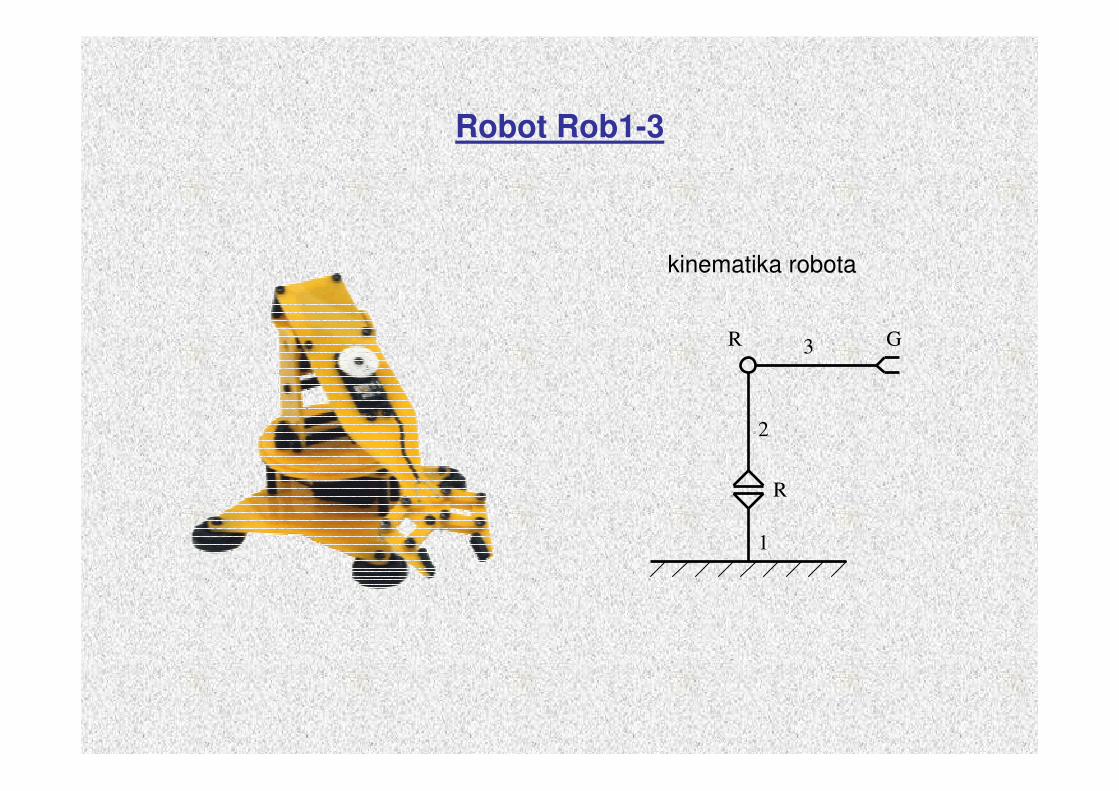
Robot Rob1-3
kinematika robota
1
2
3G
R
R
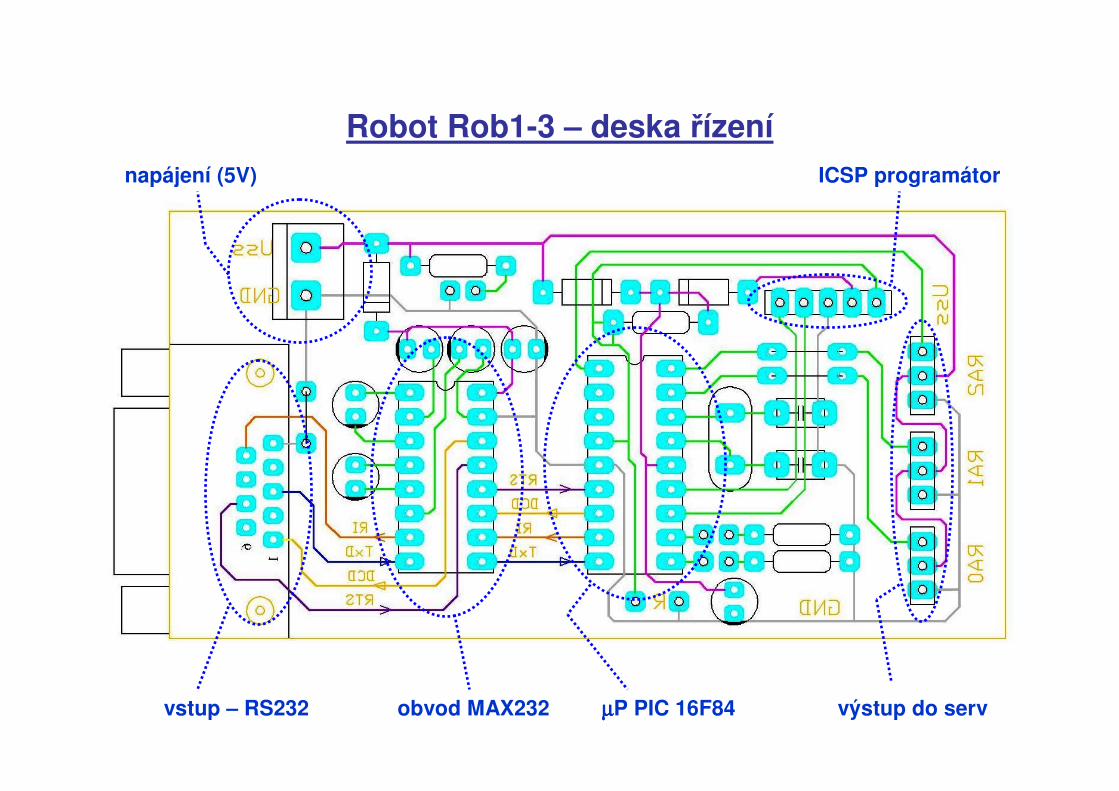
Robot Rob1-3 – deska řízení
vstup – RS232 obvod MAX232 µµµµP PIC 16F84 výstup do serv
ICSP programátornapájení (5V)
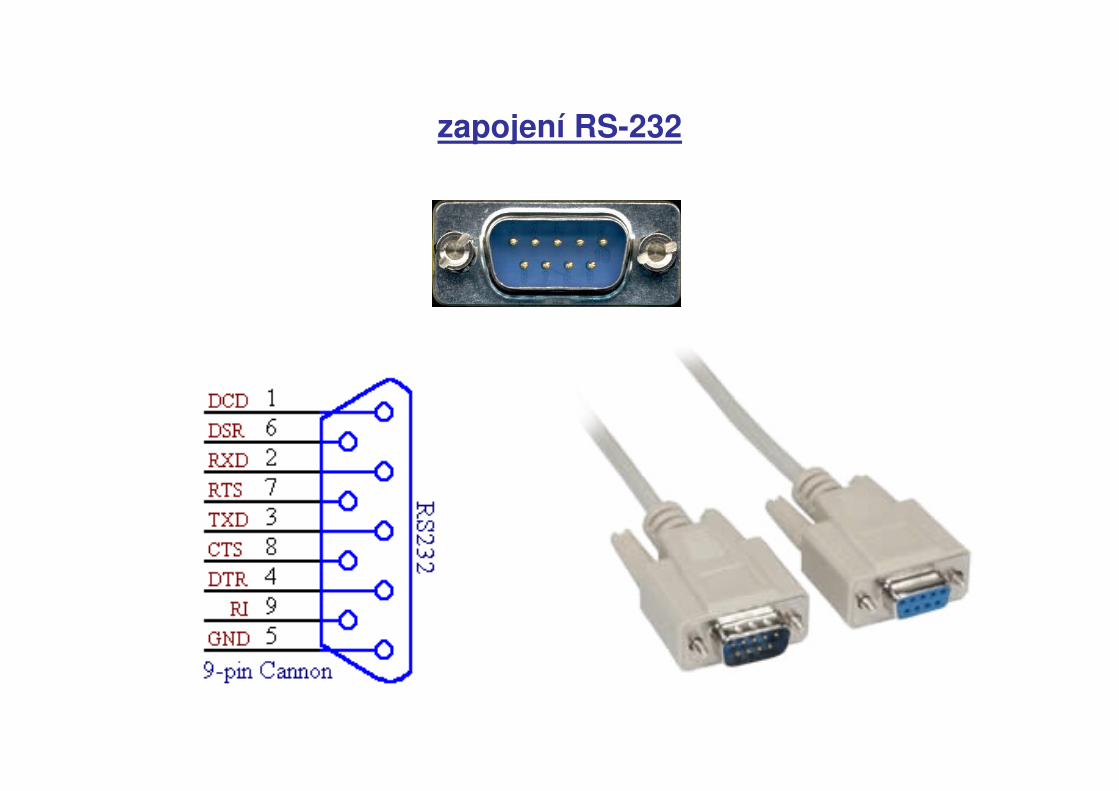
zapojení RS-232
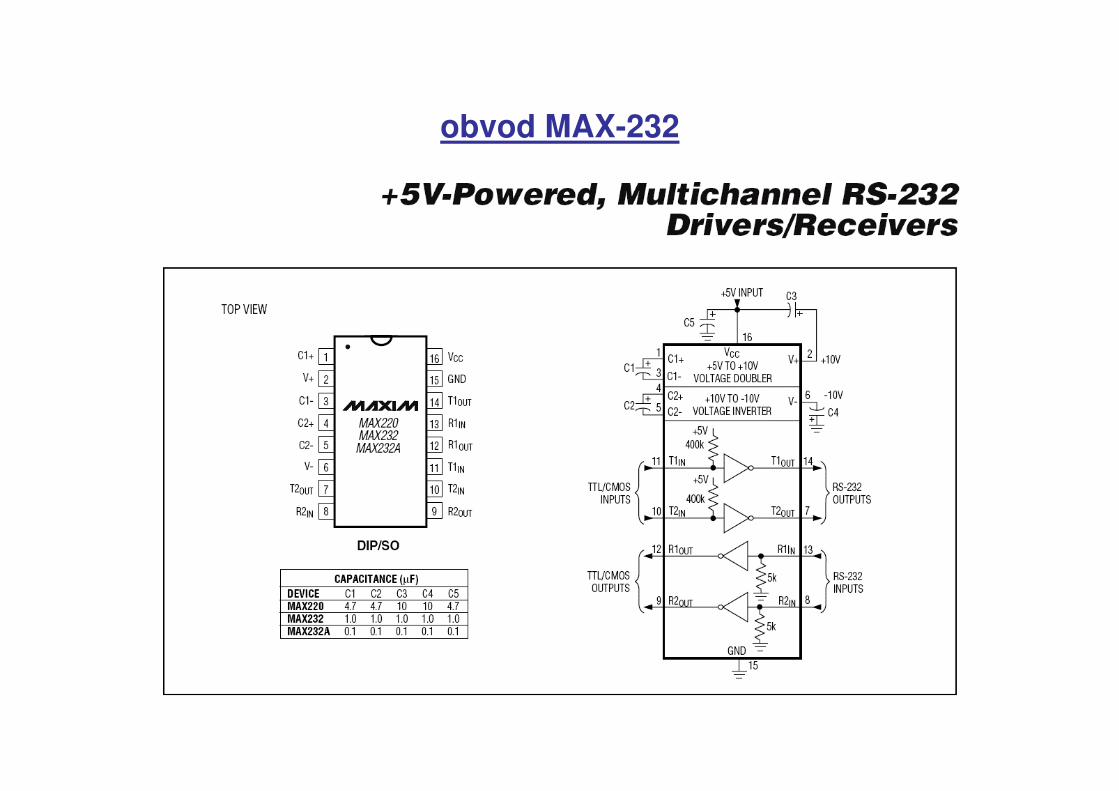
obvod MAX-232
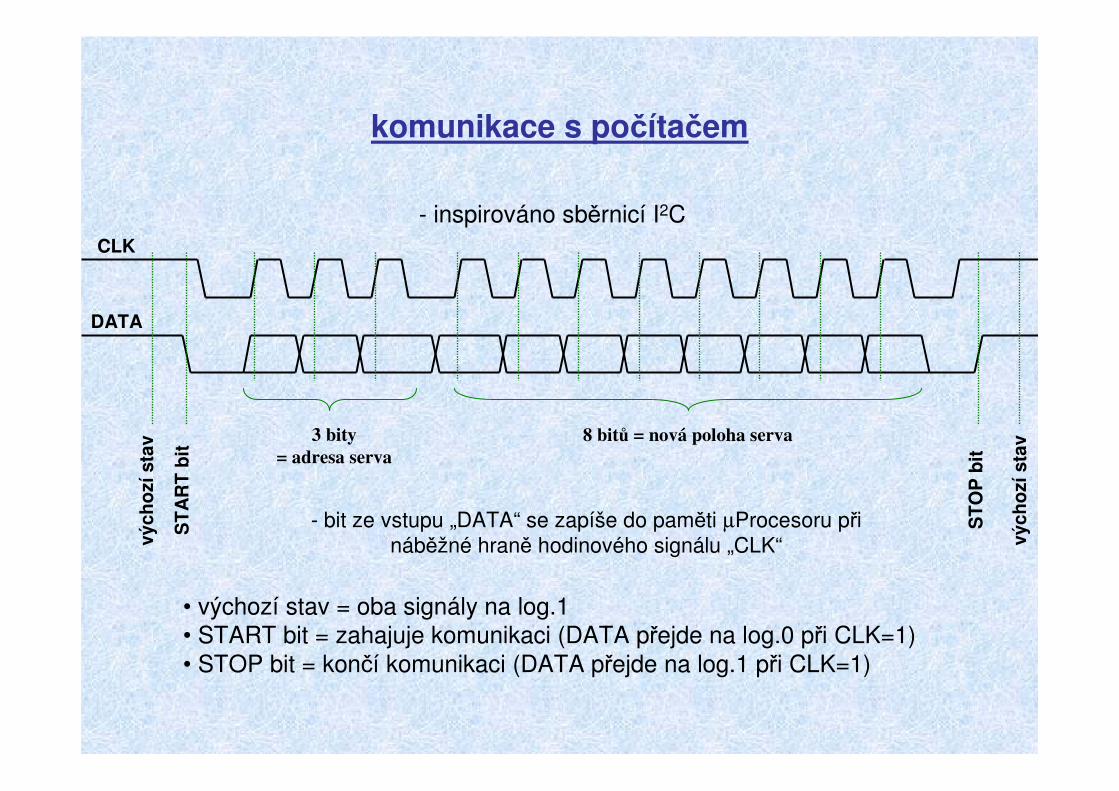
komunikace s počítačem
- inspirováno sběrnicí I2C
DATA
CLK
vý
ch
ozí
sta
v
ST
AR
T b
it
ST
OP
bit
3 bity
= adresa serva
8 bitů = nová poloha serva
- bit ze vstupu „DATA“ se zapíše do paměti µProcesoru při náběžné hraně hodinového signálu „CLK“
• výchozí stav = oba signály na log.1
• START bit = zahajuje komunikaci (DATA přejde na log.0 při CLK=1)
• STOP bit = končí komunikaci (DATA přejde na log.1 při CLK=1)
vý
ch
ozí
sta
v
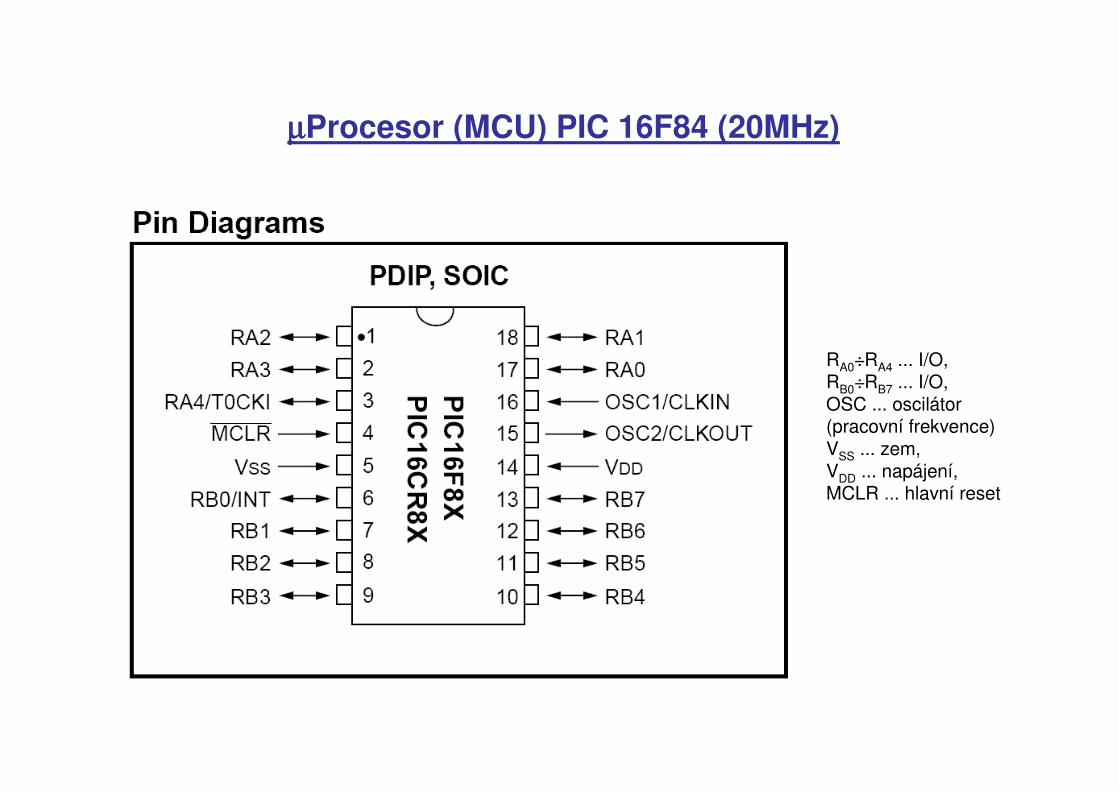
µµµµProcesor (MCU) PIC 16F84 (20MHz)
RA0÷RA4 ... I/O,RB0÷RB7 ... I/O, OSC ... oscilátor (pracovní frekvence)VSS ... zem, VDD ... napájení, MCLR ... hlavní reset
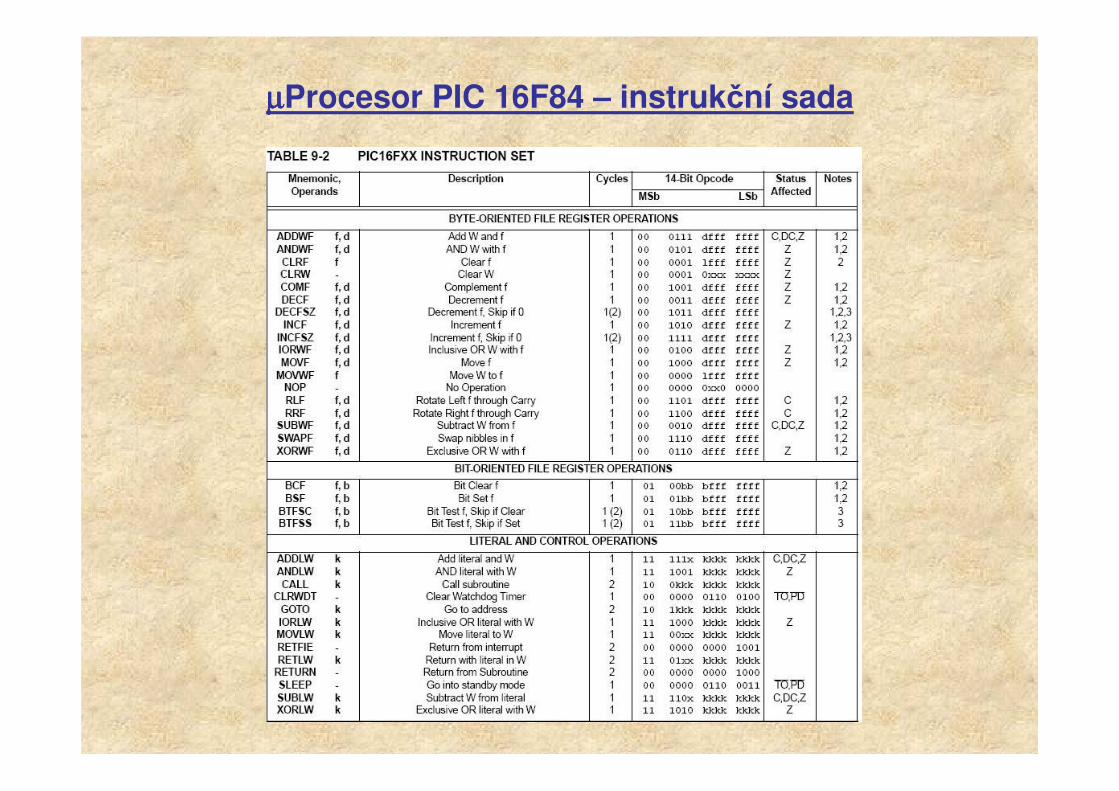
µµµµProcesor PIC 16F84 – instrukční sada
µµµµProcesor PIC 16F84 – vytvoření a nahrání programu
www.microchip.com►Products ► Development tools ► MPLAB IDE
- vývojové prostředí MPLab, zdarma ke stažení
- programování mikroprocesorů v Assembleru
http://www.belza.cz/digital/jdm.htm - návrhy programátorů pro µProcesory
http://www.ic-prog.com – jednoduchý program pro upload programu do MCU




![Víceúelový LED display - cvut.cz · 2018. 5. 28. · standardnímu protokolu (i2C, SPI, RS232). Pro ovládání Arduinem se používá knihovna NeoPixel od Adafruitu[2]. Komunikace](https://static.dokumenty.site/doc/80x56/6122070e6509457ef97c9fb7/vceelov-led-display-cvut-2018-5-28-standardnmu-protokolu-i2c-spi.jpg)












