174
PRUŽNOST A PEVNOST II PŘÍKLADY Jan Řezníček Praha 2018

PRUŽNOST A PEVNOST II
PŘÍKLADYJan Řezníček
Praha 2018
Motto: Já se chodím na přednášky bavit a byl bych moc rád, kdybyste se Vy bavili spolu se mnou a s pány Hookem, Newtonem, Eulerem a dalšími.
Text neprošel jazykovou ani redakční úpravou
© Jan Řezníček, Fakulta strojní ČVUT v Praze 2018
ÚSTAV MECHANIKY, BIOMECHANIKY A MECHATRONIKY ODBOR PRUŽNOSTI A PEVNOSTI
PRUŽNOST A PEVNOST II
PŘÍKLADY
K DOPLNĚNÍ PŘEDNÁŠEK V BAKALÁŘSKÉM STUDIJNÍM PROGRAMU
TEORETICKÝ ZÁKLAD STROJNÍHO INŽENÝRSTVÍ V ZIMNÍM SEMESTRU AKADEMICKÉHO ROKU 2018/2019
přednáší
Jan Řezníček
Praha 15. října 2018

Vážené kolegyně a vážení kolegové, dostalo se mi té cti, že mohu vést na Fakultě strojní Českého vysokého učení technického v Praze přednášky a semináře z předmětu Pružnost a pevnost II pro studenty bakalářského studijního programu „Teoretický základ strojního inženýrství“, ale také i pro zájemce z oborového bakalářského studijního programu „Strojírenství“.
Při přípravě podkladů pro tento předmět jsem vycházel ze zkušeností, které mám od akademického roku 2007/08 s novou formou výuky předmětu Pružnost a pevnost IA ve druhém ročníku bakalářských studijních programů na FS ČVUT v Praze. Původní (loňská) verze přednáškových podkladů z PP II obsahovala řadu příkladů, ze kterých jsem na přednáškách řešil jen některé, a na závěr většiny kapitol byly přidány další příklady, které se v posledních letech objevily ve zkouškových písemkách z PP II.
Původní (loňský) text byl zbytečně dlouhý, řadu příkladů jsem „přeskakoval“ a naopak Vaši předchůdci chtěli k příkladům z písemek alespoň výsledky „pro kontrolu“. Pro letošní rok jsem pozměnil strategii tvorby podkladů pro přednášky. Ty nově obsahují pouze teorii a jen ty příklady, které z důvodu názornosti budu na přednáškách opravdu kompletně řešit. Všechny ostatní příklady jsem přesunul do tohoto nového samostatného textu a během prázdnin jsem také všechny příklady vypočítal a doplnil k nim kompletní postup řešení.
Předkládám Vám, mým studentkám a studentům, cosi jako sbírku řešených příkladů, která by Vám mohla usnadnit práci při přípravě ke zkoušce – hlavně její písemné části. Netvrdím, že se u zkoušky nemohou objevit i jiné příklady, ale tento text tematicky pokrývá celou látku a při pochopení těchto příkladů Vás již u zkoušky nemůže „nic překvapit“.
Současně ušetříme i čas na přednáškách a já budu moci vysvětlovat teorii ve větším klidu. Přicházím s tímto textem v době, kdy všichni budete na závěr semestru konat celkovou semestrální zkoušku, a doufám, že tyto příklady Vám pomůžou k pochopení pružnosti jako celku a k bezproblémovému zvládnutí celé semestrální zkoušky.
Na závěr bych Vám všem chtěl popřát hodně úspěchů během celého studia. Pokud budete v průběhu následujících let na fakultě cokoliv potřebovat, tak jsem Vám k dispozici, protože jednou jste MOJI STUDENTI, a to je pro mě závazek i do budoucna, kdy Vás již nebudu učit.
: 224 352 424 : 725 351 511 : [email protected] : reznicek.jan : www.facebook.com/Pruznost
V Praze v pondělí dne 15. října 2018

Pružnost a pevnost II ZS 2018/2019
3
OBSAH
1. TENKÉ KŘIVÉ PRUTY A RÁMY .......................................................... 5
2. NAMÁHÁNÍ PŘI PROMĚNLIVÉM ZATÍŽENÍ ................................. 29
3. ROTAČNĚ SYMETRICKÉ ÚLOHY ................................................... 41
4. STABILITA PŘÍMÝCH PRUTŮ – VZPĚR ......................................... 77
5. MATEMATICKÁ TEORIE PRUŽNOSTI .......................................... 109
6. KRUT NEKRUHOVÝCH PROFILŮ ................................................ 123
7. TECHNICKÁ PLASTICITA ............................................................... 139
8. ZÁKLADY LOMOVÉ MECHANIKY ................................................ 165
SEZNAM DOPORUČENÉ LITERATURY ............................................ 170
4
SEZNAM NEJČASTĚJI POUŽÍVANÝCH VELIČIN velká/malá písmena řecká abeceda
A [mm2] plocha průřezu α [-] úhel B ; C ; K konstanta α [1] součinitel tvaru D [mm] rozměr – průměr β [-] úhel E [N⋅mm−2] modul pružnosti v tahu β [1] součinitel vrubu F [N] síla – obecná γ [N⋅mm−3] měrná tíha G [N⋅mm−2] modul pružnosti ve smyku δ [mm⋅N−1] poddajnost G [N] síla – gravitační ε [1] deformace H [mm] rozměr – výška ε [1] součinitel velikosti Ii [N⋅mm−2]i invarianta tenzoru i = 1, 2, 3 η [1] součinitel jakosti povrchu JP [mm4] polární kvadratický moment η [%] účinnost Jx, y, z [mm4] osový kvadratický moment η [mm] obecná souřadnice JK [mm4] kvadratický moment ϕ [-] úhel L [mm] rozměr – délka λ [N⋅mm−2] hustota deformační energie M [N⋅mm] obecný moment λ [1] štíhlost prutu MO [N⋅mm] ohybový moment µ [kg⋅mm−1] hmotnost jednotky délky MK [N⋅mm] krouticí moment ν [N⋅mm−2] napětí – obecné N [N] síla – normálová ν [-] Poissonovo číslo O [N] síla – odstředivá/osová π [-] Ludolfovo číslo (3,14159…) Q [N] síla – od spojitého zatížení ρ [kg⋅mm−3] hustota R [mm] rozměr – poloměr ρ [mm] obecný poloměr R [N] síla – reakční σ [N⋅mm−2] napětí – normálové T [N] síla – tečná τ [N⋅mm−2] napětí – smykové U [N⋅mm] deformační energie ω [s−1] úhlová rychlost V [mm3] objem ξ [mm] obecná souřadnice WO [mm3] modul průřezu v ohybu ψ [-] úhel WK [mm3] modul průřezu v krutu X [N] síla – do směru osy x Y [N] síla – do směru osy y Z [N] síla – do směru osy z a ; b ; c [mm] rozměr – délkový d [mm] rozměr – průměr e [mm] rozměr – excentricita f [1] síla – jednotková “1“ g [m⋅s−2] gravitační zrychlení (9,81…) h [mm] rozměr – hloubka i [mm] poloměr setrvačnosti i ; j ; n [-] sčítací index k [N⋅mm−1] tuhost [mm] rozměr – délka m [1⋅mm] moment od jednotkové síly m [kg] hmotnost p [MPa],[Pa] tlak/přetlak q [N⋅mm−1] spojité zatížení – pruty q [N⋅mm−2] spojitý tlak – desky q [-] Součinitel vrubové citlivosti r [mm] rozměr – poloměr s ; t [mm] rozměr – tloušťka u [mm] posunutí – do směru x v [mm] posunutí – do směru y w [mm] posunutí – do směru z x [mm] obecná souřadnice y [mm] obecná souřadnice z [mm] obecná souřadnice

Pružnost a pevnost II ZS 2018/2019
5
1. TENKÉ KŘIVÉ PRUTY A RÁMY PŘÍKLAD 1.1 (KŘIVÝ PRUT – STATICKY UČITÝ):
Dáno: M ; r ; E·J = konst. Určit: ϕB (natočení vrchního bodu B křivého prutu), a
uA (posunutí pravé posuvné podpěry A).
Řešení: Jedná o křivý prut ve tvaru části kružnice a musíme tedy použít k výpočtu Mohrův integrál.
JE
dssmsMs
mo
B
B
⋅
⋅⋅
=∫
)(
)()(ϕ a
JE
dssmsMu s
fo
A
A
⋅
⋅⋅
=∫
)(
)()( .
Protože úloha je staticky určitá (3 – 2 – 1 = 0), můžeme reakce v podpěrách vyvolané momentem M určit přímo ze statických rovnic ke krajním bodům A a C:
ΣMC: 02 =−⋅⋅ MrRAy a ΣMA: 02 =+⋅⋅− MrRCy
RAy = RCy = M/2⋅r (ΣFx: RCx = 0).
Nyní připojíme do bodu B jednotkový moment ″1″ a opět určíme reakce v podpěrách A a C: rAy = rCy = 1/2⋅r a rCx = 0 .
Pro výpočet posunutí uA připojíme jednotkovou sílu ″1″ do bodu A a určíme reakci v podpěře B: rCx = 1 .
pole 𝑑𝑑𝑑𝑑 |
𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑íℎ𝑑𝑑𝑜𝑜𝑑𝑑í Mo(s) )(sm Bm
o )(sm Afo
A – B 2/π
01ϕdR ⋅ )cos1(2 1ϕ−⋅⋅
⋅− r
rM )cos1(
21
1ϕ−⋅⋅⋅
− rr
1sin"1" ϕ⋅⋅r
B – C π
2/π2ϕdR ⋅ Mrr
M−−⋅⋅
⋅− )cos1(
2 2ϕ "1")cos1(21
2 +−⋅⋅⋅
− ϕrr
1sin"1" ϕ⋅⋅r
Hledané deformace (natočení ϕB a posuv uA) vypočteme integrací přes celou délku prutu:
𝜑𝜑𝐵𝐵 =1
𝐸𝐸 ∙ 𝐽𝐽∙ �� �−
𝑀𝑀2
∙ (1 − cos 𝜑𝜑1)� ∙
𝜋𝜋 2⁄
0
�−12
∙ (1 − cos 𝜑𝜑1)� ∙ [𝑟𝑟 ∙ 𝑑𝑑𝜑𝜑1] +
+ � �−𝑀𝑀2
∙ (1 − cos 𝜑𝜑2) + 𝑀𝑀� ∙𝜋𝜋
𝜋𝜋 2⁄
�−12
∙ (1 − cos 𝜑𝜑2) + "1"� ∙ [𝑟𝑟 ∙ 𝑑𝑑𝜑𝜑2]� = �3 ∙ 𝜋𝜋
8− 1� ∙
𝑀𝑀 ∙ 𝑟𝑟𝐸𝐸 ∙ 𝐽𝐽
.
𝑢𝑢𝐴𝐴 =1
𝐸𝐸 ∙ 𝐽𝐽∙ �� �−
𝑀𝑀2
∙ (1 − cos 𝜑𝜑1)� ∙
𝜋𝜋 2⁄
0
["1" ∙ 𝑟𝑟 ∙ sin 𝜑𝜑1] ∙ [𝑟𝑟 ∙ 𝑑𝑑𝜑𝜑1]
+ � �−𝑀𝑀2
∙ (1 − cos 𝜑𝜑2) + 𝑀𝑀� ∙𝜋𝜋
𝜋𝜋 2⁄
["1" ∙ 𝑟𝑟 ∙ sin 𝜑𝜑2] ∙ [𝑟𝑟 ∙ 𝑑𝑑𝜑𝜑2]� = �−14
+14
� ∙𝑀𝑀 ∙ 𝑟𝑟2
𝐸𝐸 ∙ 𝐽𝐽= 0 .
A
B
C
″1″ 1
ϕ1 ϕ2
M
A
B
C RCy
ϕ1 ϕ2
RAy
A
B
C 1/2⋅r
″1″
ϕ1 ϕ2
1/2⋅r
M
ϕ B
A
B
C r
uA
6
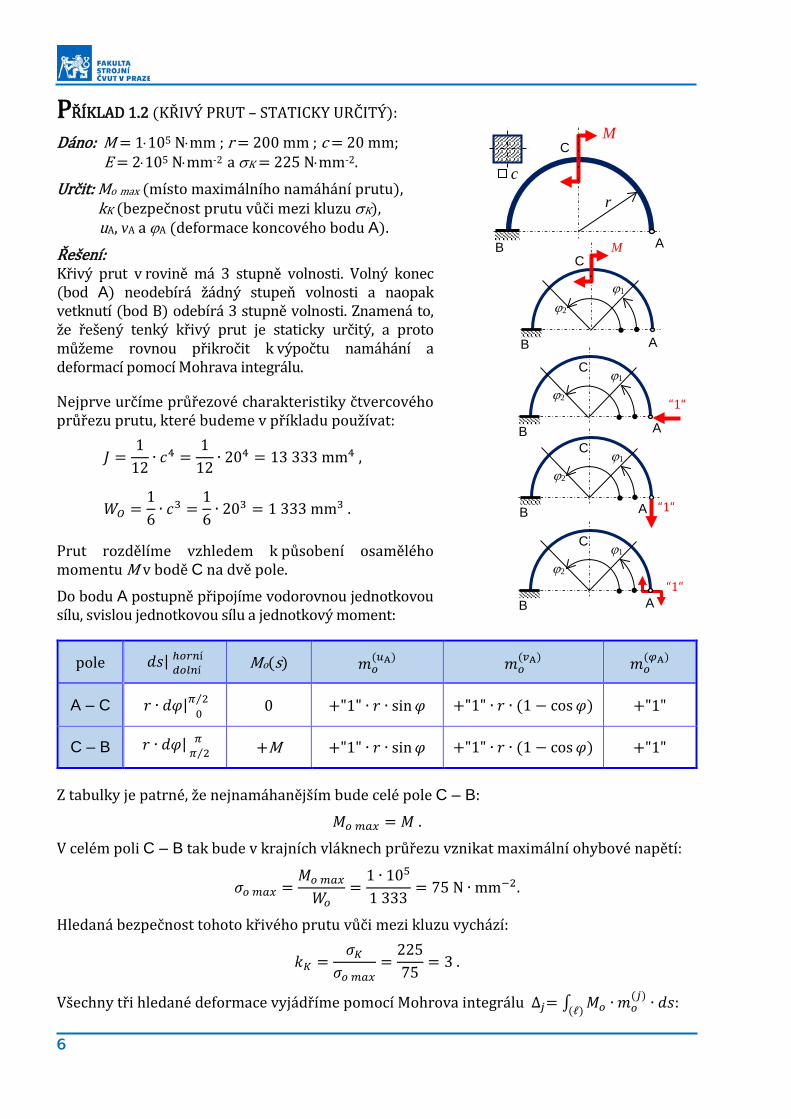
PŘÍKLAD 1.2 (KŘIVÝ PRUT – STATICKY URČITÝ):
Dáno: M = 1⋅105 N⋅mm ; r = 200 mm ; c = 20 mm; E = 2⋅105 N⋅mm-2 a σK = 225 N⋅mm-2.
Určit: Mo max (místo maximálního namáhání prutu), kK (bezpečnost prutu vůči mezi kluzu σK),
uA, vA a ϕA (deformace koncového bodu A).
Řešení: Křivý prut v rovině má 3 stupně volnosti. Volný konec (bod A) neodebírá žádný stupeň volnosti a naopak vetknutí (bod B) odebírá 3 stupně volnosti. Znamená to, že řešený tenký křivý prut je staticky určitý, a proto můžeme rovnou přikročit k výpočtu namáhání a deformací pomocí Mohrava integrálu.
Nejprve určíme průřezové charakteristiky čtvercového průřezu prutu, které budeme v příkladu používat:
𝐽𝐽 =1
12∙ 𝑐𝑐4 =
112
∙ 204 = 13 333 mm4 ,
𝑊𝑊𝑂𝑂 =16
∙ 𝑐𝑐3 =16
∙ 203 = 1 333 mm3 .
Prut rozdělíme vzhledem k působení osamělého momentu M v bodě C na dvě pole.
Do bodu A postupně připojíme vodorovnou jednotkovou sílu, svislou jednotkovou sílu a jednotkový moment:
pole 𝑑𝑑𝑑𝑑 |
𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑íℎ𝑑𝑑𝑜𝑜𝑑𝑑í Mo(s) 𝑚𝑚𝑑𝑑
(𝑢𝑢A) 𝑚𝑚𝑑𝑑(𝑣𝑣A) 𝑚𝑚𝑑𝑑
(𝜑𝜑A)
A – C 𝑟𝑟 ∙ 𝑑𝑑𝜑𝜑| 0𝜋𝜋 2⁄ 0 +"1" ∙ 𝑟𝑟 ∙ sin 𝜑𝜑 +"1" ∙ 𝑟𝑟 ∙ (1 − cos 𝜑𝜑) +"1"
C – B 𝑟𝑟 ∙ 𝑑𝑑𝜑𝜑| 𝜋𝜋 2⁄ 𝜋𝜋 +M +"1" ∙ 𝑟𝑟 ∙ sin 𝜑𝜑 +"1" ∙ 𝑟𝑟 ∙ (1 − cos 𝜑𝜑) +"1"
Z tabulky je patrné, že nejnamáhanějším bude celé pole C – B:
𝑀𝑀𝑑𝑑 𝑚𝑚𝑚𝑚𝑚𝑚 = 𝑀𝑀 .
V celém poli C – B tak bude v krajních vláknech průřezu vznikat maximální ohybové napětí:
𝜎𝜎𝑑𝑑 𝑚𝑚𝑚𝑚𝑚𝑚 =𝑀𝑀𝑑𝑑 𝑚𝑚𝑚𝑚𝑚𝑚
𝑊𝑊𝑑𝑑=
1 ∙ 105
1 333= 75 N ∙ mm−2.
Hledaná bezpečnost tohoto křivého prutu vůči mezi kluzu vychází:
𝑘𝑘𝐾𝐾 =𝜎𝜎𝐾𝐾
𝜎𝜎𝑑𝑑 𝑚𝑚𝑚𝑚𝑚𝑚=
22575
= 3 .
Všechny tři hledané deformace vyjádříme pomocí Mohrova integrálu ∆𝑗𝑗= ∫ 𝑀𝑀𝑑𝑑 ∙ 𝑚𝑚𝑑𝑑(𝑗𝑗) ∙ 𝑑𝑑𝑑𝑑
(ℓ) :
r
M
A B
C
c
M
A B
C
ϕ1
ϕ2
“1“
A B
C ϕ1
ϕ2
“1“ A B
C ϕ1
ϕ2
“1“
A B
C ϕ1
ϕ2
Pružnost a pevnost II ZS 2018/2019
7
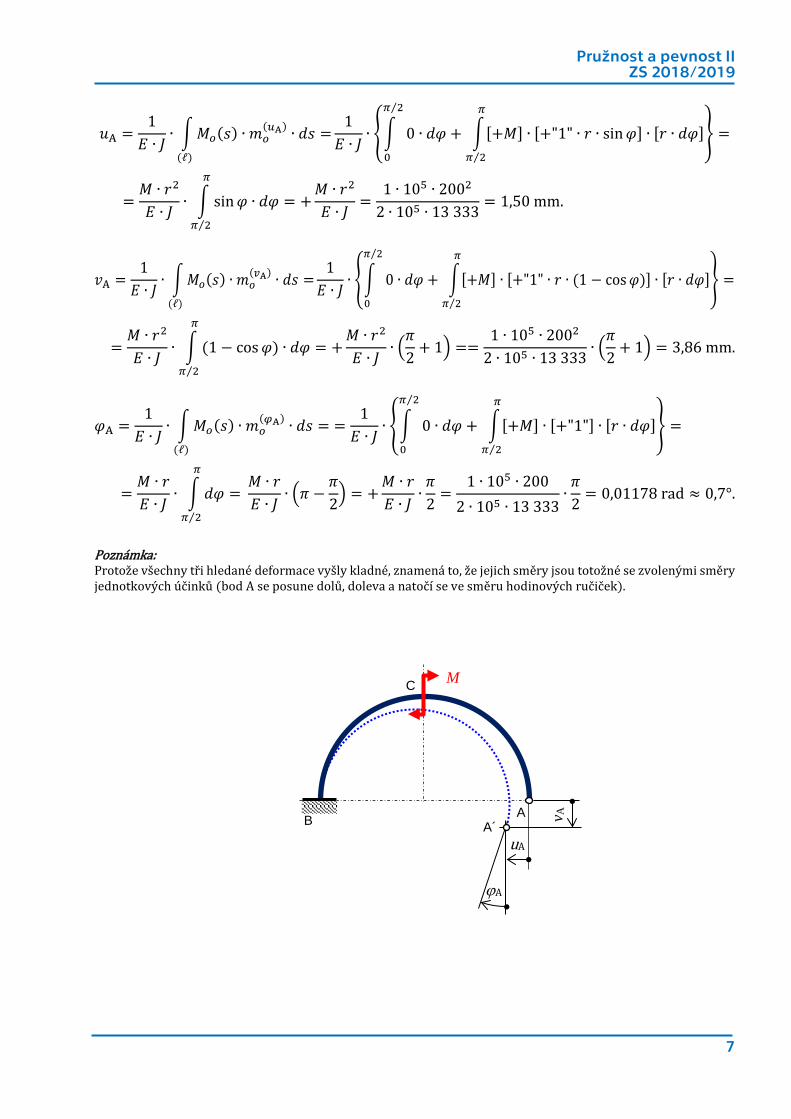
𝑢𝑢A =1
𝐸𝐸 ∙ 𝐽𝐽∙ � 𝑀𝑀𝑑𝑑(𝑑𝑑) ∙ 𝑚𝑚𝑑𝑑
(𝑢𝑢A) ∙ 𝑑𝑑𝑑𝑑 =
(ℓ)
1𝐸𝐸 ∙ 𝐽𝐽
∙ �� 0 ∙ 𝑑𝑑𝜑𝜑 + �[+𝑀𝑀] ∙ [+"1" ∙ 𝑟𝑟 ∙ sin 𝜑𝜑] ∙ [𝑟𝑟 ∙ 𝑑𝑑𝜑𝜑]𝜋𝜋
𝜋𝜋 2⁄
𝜋𝜋 2⁄
0
� =
=𝑀𝑀 ∙ 𝑟𝑟2
𝐸𝐸 ∙ 𝐽𝐽∙ � sin 𝜑𝜑 ∙ 𝑑𝑑𝜑𝜑
𝜋𝜋
𝜋𝜋 2⁄
= +𝑀𝑀 ∙ 𝑟𝑟2
𝐸𝐸 ∙ 𝐽𝐽=
1 ∙ 105 ∙ 2002
2 ∙ 105 ∙ 13 333= 1,50 mm.
𝑣𝑣A =1
𝐸𝐸 ∙ 𝐽𝐽∙ � 𝑀𝑀𝑑𝑑(𝑑𝑑) ∙ 𝑚𝑚𝑑𝑑
(𝑣𝑣A) ∙ 𝑑𝑑𝑑𝑑 =
(ℓ)
1𝐸𝐸 ∙ 𝐽𝐽
∙ �� 0 ∙ 𝑑𝑑𝜑𝜑 + �[+𝑀𝑀] ∙ [+"1" ∙ 𝑟𝑟 ∙ (1 − cos 𝜑𝜑)] ∙ [𝑟𝑟 ∙ 𝑑𝑑𝜑𝜑]𝜋𝜋
𝜋𝜋 2⁄
𝜋𝜋 2⁄
0
� =
=𝑀𝑀 ∙ 𝑟𝑟2
𝐸𝐸 ∙ 𝐽𝐽∙ � (1 − cos 𝜑𝜑) ∙ 𝑑𝑑𝜑𝜑
𝜋𝜋
𝜋𝜋 2⁄
= +𝑀𝑀 ∙ 𝑟𝑟2
𝐸𝐸 ∙ 𝐽𝐽∙ �
𝜋𝜋2
+ 1� ==1 ∙ 105 ∙ 2002
2 ∙ 105 ∙ 13 333∙ �
𝜋𝜋2
+ 1� = 3,86 mm.
𝜑𝜑A =1
𝐸𝐸 ∙ 𝐽𝐽∙ � 𝑀𝑀𝑑𝑑(𝑑𝑑) ∙ 𝑚𝑚𝑑𝑑
(𝜑𝜑A) ∙ 𝑑𝑑𝑑𝑑 =
(ℓ)
=1
𝐸𝐸 ∙ 𝐽𝐽∙ �� 0 ∙ 𝑑𝑑𝜑𝜑 + �[+𝑀𝑀] ∙ [+"1"] ∙ [𝑟𝑟 ∙ 𝑑𝑑𝜑𝜑]
𝜋𝜋
𝜋𝜋 2⁄
𝜋𝜋 2⁄
0
� =
=𝑀𝑀 ∙ 𝑟𝑟𝐸𝐸 ∙ 𝐽𝐽
∙ � 𝑑𝑑𝜑𝜑𝜋𝜋
𝜋𝜋 2⁄
=𝑀𝑀 ∙ 𝑟𝑟𝐸𝐸 ∙ 𝐽𝐽
∙ �𝜋𝜋 −𝜋𝜋2
� = +𝑀𝑀 ∙ 𝑟𝑟𝐸𝐸 ∙ 𝐽𝐽
∙𝜋𝜋2
=1 ∙ 105 ∙ 200
2 ∙ 105 ∙ 13 333∙
𝜋𝜋2
= 0,01178 rad ≈ 0,7°.
Poznámka: Protože všechny tři hledané deformace vyšly kladné, znamená to, že jejich směry jsou totožné se zvolenými směry jednotkových účinků (bod A se posune dolů, doleva a natočí se ve směru hodinových ručiček).
v A
M
A B
C
A´ uA
ϕA
8
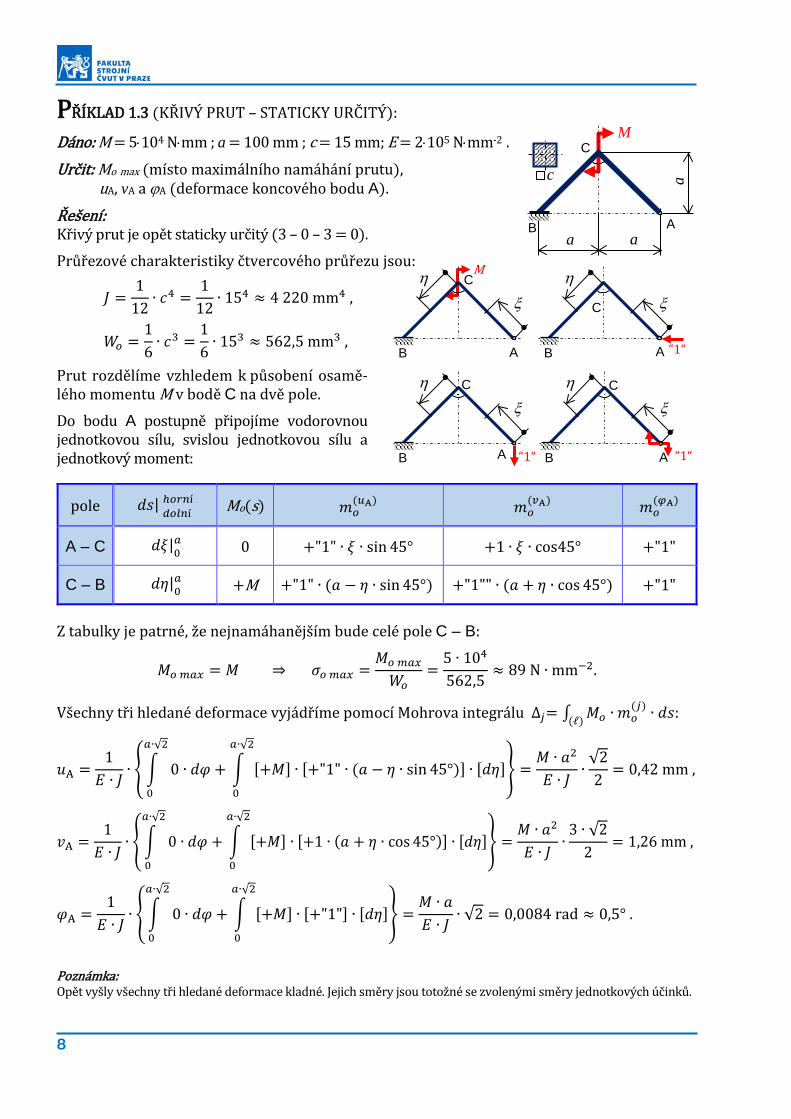
PŘÍKLAD 1.3 (KŘIVÝ PRUT – STATICKY URČITÝ):
Dáno: M = 5⋅104 N⋅mm ; a = 100 mm ; c = 15 mm; E = 2⋅105 N⋅mm-2 .
Určit: Mo max (místo maximálního namáhání prutu), uA, vA a ϕA (deformace koncového bodu A).
Řešení: Křivý prut je opět staticky určitý (3 – 0 – 3 = 0).
Průřezové charakteristiky čtvercového průřezu jsou:
𝐽𝐽 =1
12∙ 𝑐𝑐4 =
112
∙ 154 ≈ 4 220 mm4 ,
𝑊𝑊𝑑𝑑 =16
∙ 𝑐𝑐3 =16
∙ 153 ≈ 562,5 mm3 ,
Prut rozdělíme vzhledem k působení osamě-lého momentu M v bodě C na dvě pole.
Do bodu A postupně připojíme vodorovnou jednotkovou sílu, svislou jednotkovou sílu a jednotkový moment:
pole 𝑑𝑑𝑑𝑑 |
𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑íℎ𝑑𝑑𝑜𝑜𝑑𝑑í Mo(s) 𝑚𝑚𝑑𝑑
(𝑢𝑢A) 𝑚𝑚𝑑𝑑(𝑣𝑣A) 𝑚𝑚𝑑𝑑
(𝜑𝜑A)
A – C 𝑑𝑑𝑑𝑑 |
0𝑚𝑚 0 +"1" ∙ 𝑑𝑑 ∙ sin 45° +1 ∙ 𝑑𝑑 ∙ cos45° +"1"
C – B 𝑑𝑑𝑑𝑑 |
0𝑚𝑚 +M +"1" ∙ (𝑎𝑎 − 𝑑𝑑 ∙ sin 45°) +"1"" ∙ (𝑎𝑎 + 𝑑𝑑 ∙ cos 45°) +"1"
Z tabulky je patrné, že nejnamáhanějším bude celé pole C – B:
𝑀𝑀𝑑𝑑 𝑚𝑚𝑚𝑚𝑚𝑚 = 𝑀𝑀 ⇒ 𝜎𝜎𝑑𝑑 𝑚𝑚𝑚𝑚𝑚𝑚 =𝑀𝑀𝑑𝑑 𝑚𝑚𝑚𝑚𝑚𝑚
𝑊𝑊𝑑𝑑=
5 ∙ 104
562,5≈ 89 N ∙ mm−2.
Všechny tři hledané deformace vyjádříme pomocí Mohrova integrálu ∆𝑗𝑗= ∫ 𝑀𝑀𝑑𝑑 ∙ 𝑚𝑚𝑑𝑑(𝑗𝑗) ∙ 𝑑𝑑𝑑𝑑(ℓ) :
𝑢𝑢A =1
𝐸𝐸 ∙ 𝐽𝐽∙ � � 0 ∙ 𝑑𝑑𝜑𝜑 + � [+𝑀𝑀] ∙ [+"1" ∙ (𝑎𝑎 − 𝑑𝑑 ∙ sin 45°)] ∙ [𝑑𝑑𝑑𝑑]
𝑚𝑚∙√2
0
𝑚𝑚∙√2
0
� =𝑀𝑀 ∙ 𝑎𝑎2
𝐸𝐸 ∙ 𝐽𝐽∙
√22
= 0,42 mm ,
𝑣𝑣A =1
𝐸𝐸 ∙ 𝐽𝐽∙ � � 0 ∙ 𝑑𝑑𝜑𝜑 + � [+𝑀𝑀] ∙ [+1 ∙ (𝑎𝑎 + 𝑑𝑑 ∙ cos 45°)] ∙ [𝑑𝑑𝑑𝑑]
𝑚𝑚∙√2
0
𝑚𝑚∙√2
0
� =𝑀𝑀 ∙ 𝑎𝑎2
𝐸𝐸 ∙ 𝐽𝐽∙
3 ∙ √22
= 1,26 mm ,
𝜑𝜑A =1
𝐸𝐸 ∙ 𝐽𝐽∙ � � 0 ∙ 𝑑𝑑𝜑𝜑 + � [+𝑀𝑀] ∙ [+"1"] ∙ [𝑑𝑑𝑑𝑑]
𝑚𝑚∙√2
0
𝑚𝑚∙√2
0
� =𝑀𝑀 ∙ 𝑎𝑎𝐸𝐸 ∙ 𝐽𝐽
∙ √2 = 0,0084 rad ≈ 0,5° .
Poznámka: Opět vyšly všechny tři hledané deformace kladné. Jejich směry jsou totožné se zvolenými směry jednotkových účinků.
a
a a
M
A B
C
c
A B
C
ξ η
A B
C ξ η M
“1“
A B
C
ξ η
A B
C
ξ η
“1“ “1“
Pružnost a pevnost II ZS 2018/2019
9
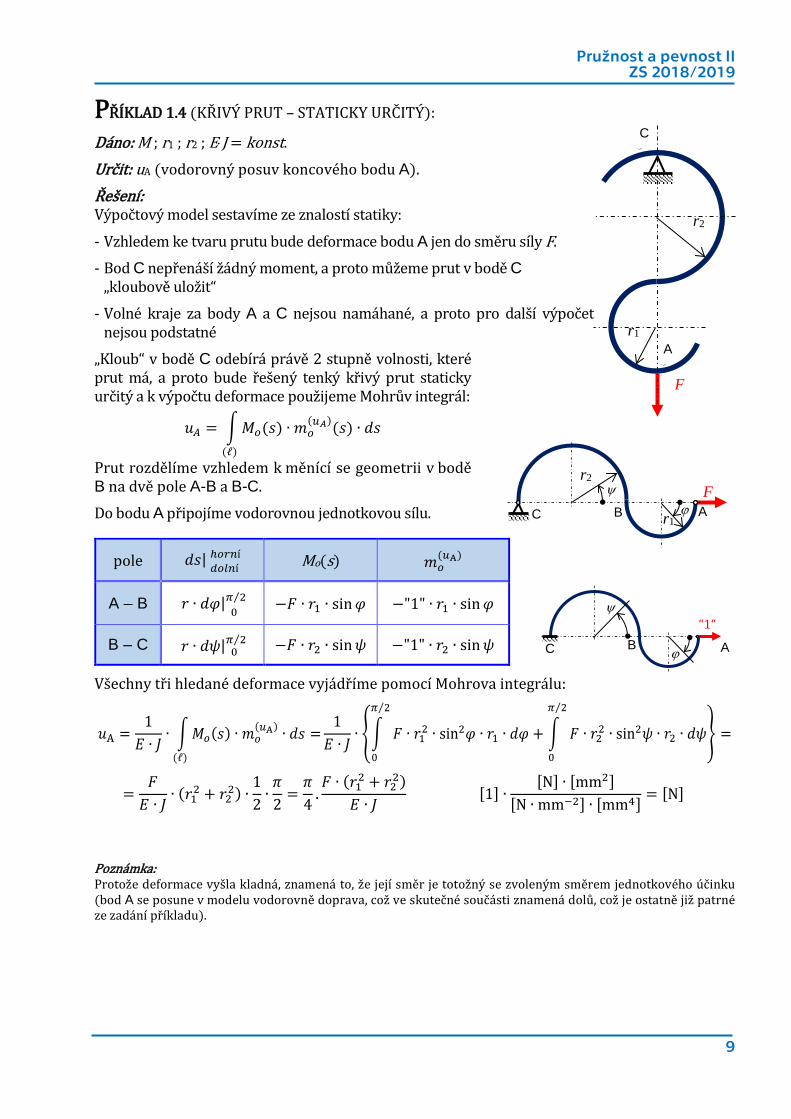
PŘÍKLAD 1.4 (KŘIVÝ PRUT – STATICKY URČITÝ):
Dáno: M ; r1 ; r2 ; E⋅J = konst.
Určit: uA (vodorovný posuv koncového bodu A).
Řešení: Výpočtový model sestavíme ze znalostí statiky:
- Vzhledem ke tvaru prutu bude deformace bodu A jen do směru síly F.
- Bod C nepřenáší žádný moment, a proto můžeme prut v bodě C „kloubově uložit“
- Volné kraje za body A a C nejsou namáhané, a proto pro další výpočet nejsou podstatné
„Kloub“ v bodě C odebírá právě 2 stupně volnosti, které prut má, a proto bude řešený tenký křivý prut staticky určitý a k výpočtu deformace použijeme Mohrův integrál:
𝑢𝑢𝐴𝐴 = � 𝑀𝑀𝑑𝑑(𝑑𝑑) ∙ 𝑚𝑚𝑑𝑑(𝑢𝑢𝐴𝐴)(𝑑𝑑) ∙ 𝑑𝑑𝑑𝑑
(ℓ)
Prut rozdělíme vzhledem k měnící se geometrii v bodě B na dvě pole A-B a B-C.
Do bodu A připojíme vodorovnou jednotkovou sílu.
pole 𝑑𝑑𝑑𝑑 |
𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑íℎ𝑑𝑑𝑜𝑜𝑑𝑑í Mo(s) 𝑚𝑚𝑑𝑑
(𝑢𝑢A)
A – B 𝑟𝑟 ∙ 𝑑𝑑𝜑𝜑| 0𝜋𝜋 2⁄ −𝐹𝐹 ∙ 𝑟𝑟1 ∙ sin 𝜑𝜑 −"1" ∙ 𝑟𝑟1 ∙ sin 𝜑𝜑
B – C 𝑟𝑟 ∙ 𝑑𝑑𝑑𝑑| 0𝜋𝜋 2⁄ −𝐹𝐹 ∙ 𝑟𝑟2 ∙ sin 𝑑𝑑 −"1" ∙ 𝑟𝑟2 ∙ sin 𝑑𝑑
Všechny tři hledané deformace vyjádříme pomocí Mohrova integrálu:
𝑢𝑢A =1
𝐸𝐸 ∙ 𝐽𝐽∙ � 𝑀𝑀𝑑𝑑(𝑑𝑑) ∙ 𝑚𝑚𝑑𝑑
(𝑢𝑢A) ∙ 𝑑𝑑𝑑𝑑 =
(ℓ)
1𝐸𝐸 ∙ 𝐽𝐽
∙ �� 𝐹𝐹 ∙ 𝑟𝑟12 ∙ sin2𝜑𝜑 ∙ 𝑟𝑟1 ∙ 𝑑𝑑𝜑𝜑 + � 𝐹𝐹 ∙ 𝑟𝑟2
2 ∙ sin2𝑑𝑑 ∙ 𝑟𝑟2 ∙ 𝑑𝑑𝑑𝑑
𝜋𝜋 2⁄
0
𝜋𝜋 2⁄
0
� =
=𝐹𝐹
𝐸𝐸 ∙ 𝐽𝐽∙ (𝑟𝑟1
2 + 𝑟𝑟22) ∙
12
∙𝜋𝜋2
=𝜋𝜋4
.𝐹𝐹 ∙ (𝑟𝑟1
2 + 𝑟𝑟22)
𝐸𝐸 ∙ 𝐽𝐽 [1] ∙
[N] ∙ [mm2][N ∙ mm−2] ∙ [mm4] = [N]
Poznámka: Protože deformace vyšla kladná, znamená to, že její směr je totožný se zvoleným směrem jednotkového účinku (bod A se posune v modelu vodorovně doprava, což ve skutečné součásti znamená dolů, což je ostatně již patrné ze zadání příkladu).
“1“
A B C
ψ
ϕ
F
r2
r1 A
C
r2 F
A
B r1 C
ψ
ϕ
10
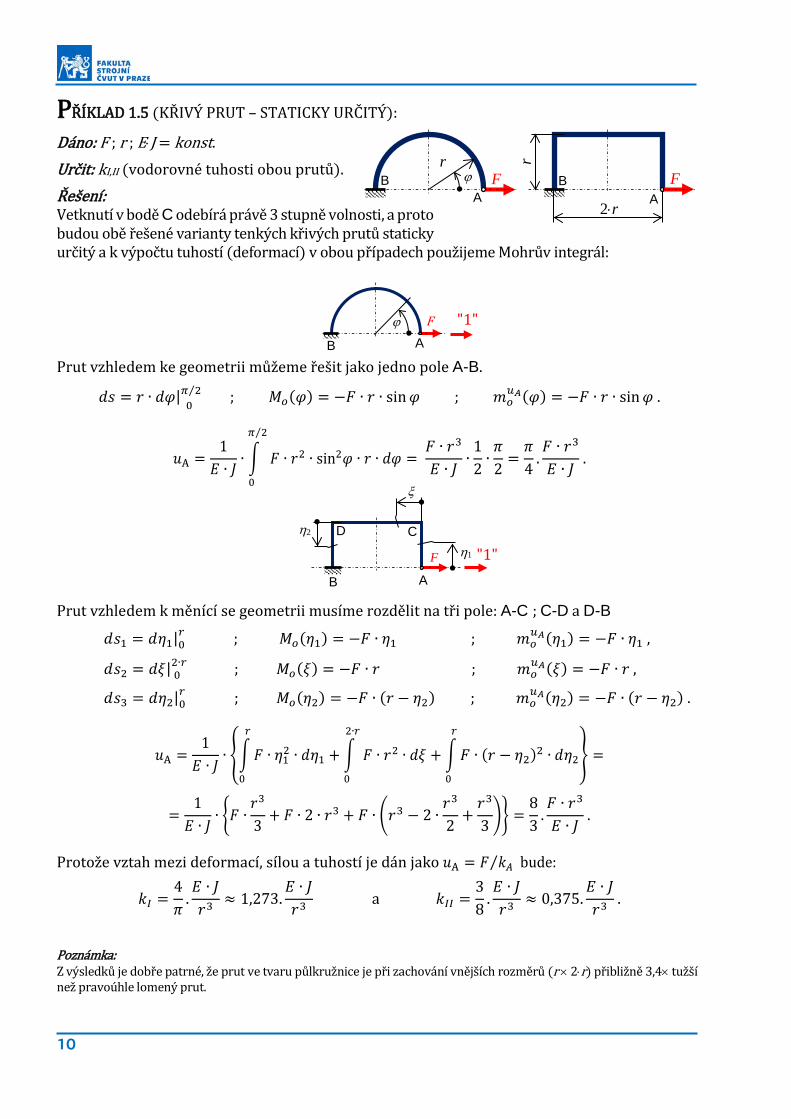
PŘÍKLAD 1.5 (KŘIVÝ PRUT – STATICKY URČITÝ):
Dáno: F ; r ; E⋅J = konst.
Určit: kI,II (vodorovné tuhosti obou prutů).
Řešení: Vetknutí v bodě C odebírá právě 3 stupně volnosti, a proto budou obě řešené varianty tenkých křivých prutů staticky určitý a k výpočtu tuhostí (deformací) v obou případech použijeme Mohrův integrál:
Prut vzhledem ke geometrii můžeme řešit jako jedno pole A-B.
𝑑𝑑𝑑𝑑 = 𝑟𝑟 ∙ 𝑑𝑑𝜑𝜑| 0𝜋𝜋 2⁄ ; 𝑀𝑀𝑑𝑑(𝜑𝜑) = −𝐹𝐹 ∙ 𝑟𝑟 ∙ sin 𝜑𝜑 ; 𝑚𝑚𝑑𝑑
𝑢𝑢𝐴𝐴(𝜑𝜑) = −𝐹𝐹 ∙ 𝑟𝑟 ∙ sin 𝜑𝜑 .
𝑢𝑢A =1
𝐸𝐸 ∙ 𝐽𝐽∙ � 𝐹𝐹 ∙ 𝑟𝑟
2 ∙ sin2𝜑𝜑 ∙ 𝑟𝑟 ∙ 𝑑𝑑𝜑𝜑
𝜋𝜋 2⁄
0
= 𝐹𝐹 ∙ 𝑟𝑟3
𝐸𝐸 ∙ 𝐽𝐽∙
12
∙𝜋𝜋2
=𝜋𝜋4
.𝐹𝐹 ∙ 𝑟𝑟3
𝐸𝐸 ∙ 𝐽𝐽 .
Prut vzhledem k měnící se geometrii musíme rozdělit na tři pole: A-C ; C-D a D-B
𝑑𝑑𝑑𝑑1 = 𝑑𝑑𝑑𝑑1|0 𝑜𝑜 ; 𝑀𝑀𝑑𝑑(𝑑𝑑1) = −𝐹𝐹 ∙ 𝑑𝑑1 ; 𝑚𝑚𝑑𝑑
𝑢𝑢𝐴𝐴(𝑑𝑑1) = −𝐹𝐹 ∙ 𝑑𝑑1 ,
𝑑𝑑𝑑𝑑2 = 𝑑𝑑𝑑𝑑| 0 2∙𝑜𝑜 ; 𝑀𝑀𝑑𝑑(𝑑𝑑) = −𝐹𝐹 ∙ 𝑟𝑟 ; 𝑚𝑚𝑑𝑑
𝑢𝑢𝐴𝐴(𝑑𝑑) = −𝐹𝐹 ∙ 𝑟𝑟 ,
𝑑𝑑𝑑𝑑3 = 𝑑𝑑𝑑𝑑2|0 𝑜𝑜 ; 𝑀𝑀𝑑𝑑(𝑑𝑑2) = −𝐹𝐹 ∙ (𝑟𝑟 − 𝑑𝑑2) ; 𝑚𝑚𝑑𝑑
𝑢𝑢𝐴𝐴(𝑑𝑑2) = −𝐹𝐹 ∙ (𝑟𝑟 − 𝑑𝑑2) .
𝑢𝑢A =1
𝐸𝐸 ∙ 𝐽𝐽∙ �� 𝐹𝐹 ∙ 𝑑𝑑1
2 ∙ 𝑑𝑑𝑑𝑑1
𝑜𝑜
0
+ � 𝐹𝐹 ∙ 𝑟𝑟 2 ∙ 𝑑𝑑𝑑𝑑
2∙𝑜𝑜
0
+ � 𝐹𝐹 ∙ (𝑟𝑟 − 𝑑𝑑2)2 ∙ 𝑑𝑑𝑑𝑑2
𝑜𝑜
0
� =
=1
𝐸𝐸 ∙ 𝐽𝐽∙ �𝐹𝐹 ∙
𝑟𝑟3
3+ 𝐹𝐹 ∙ 2 ∙ 𝑟𝑟
3 + 𝐹𝐹 ∙ �𝑟𝑟3 − 2 ∙𝑟𝑟3
2+
𝑟𝑟3
3�� =
83
.𝐹𝐹 ∙ 𝑟𝑟3
𝐸𝐸 ∙ 𝐽𝐽 .
Protože vztah mezi deformací, sílou a tuhostí je dán jako 𝑢𝑢A = 𝐹𝐹 𝑘𝑘𝐴𝐴⁄ bude:
𝑘𝑘𝐼𝐼 =4𝜋𝜋
.𝐸𝐸 ∙ 𝐽𝐽𝑟𝑟3 ≈ 1,273.
𝐸𝐸 ∙ 𝐽𝐽𝑟𝑟3 a 𝑘𝑘𝐼𝐼𝐼𝐼 =
38
.𝐸𝐸 ∙ 𝐽𝐽𝑟𝑟3 ≈ 0,375.
𝐸𝐸 ∙ 𝐽𝐽𝑟𝑟3 .
Poznámka: Z výsledků je dobře patrné, že prut ve tvaru půlkružnice je při zachování vnějších rozměrů (r × 2⋅r) přibližně 3,4× tužší než pravoúhle lomený prut.
F
A B
ϕ
r F
A B ϕ
2⋅r
F
A B
r
F
A B
η2
η1
ξ
C D
"1"
"1"
Pružnost a pevnost II ZS 2018/2019
11
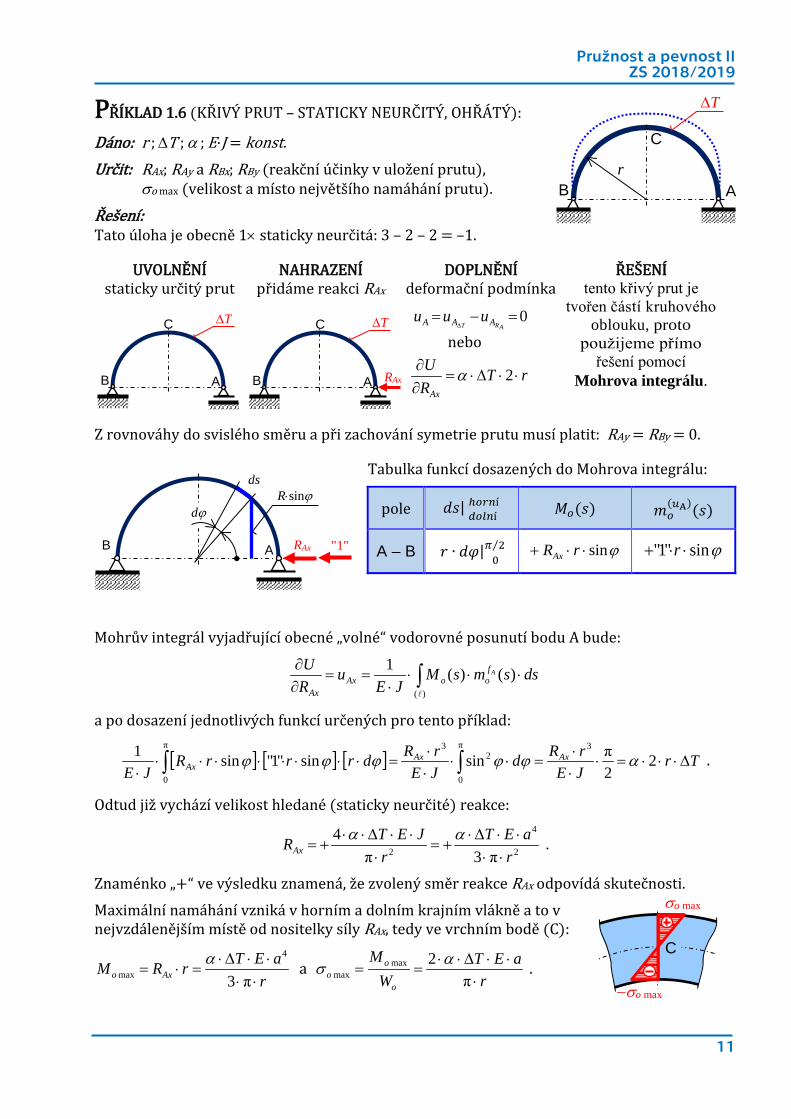
PŘÍKLAD 1.6 (KŘIVÝ PRUT – STATICKY NEURČITÝ, OHŘÁTÝ):
Dáno: r ; ∆T ; α ; E·J = konst. Určit: RAx; RAy a RBx; RBy (reakční účinky v uložení prutu),
σo max (velikost a místo největšího namáhání prutu).
Řešení: Tato úloha je obecně 1× staticky neurčitá: 3 – 2 – 2 = –1.
UVOLNĚNÍ NAHRAZENÍ DOPLNĚNÍ ŘEŠENÍ staticky určitý prut přidáme reakci RAx deformační podmínka
0=−=∆ ART AAA uuu
nebo
rTRU
Ax
⋅⋅∆⋅=∂∂ 2α
Z rovnováhy do svislého směru a při zachování symetrie prutu musí platit: RAy = RBy = 0.
Tabulka funkcí dosazených do Mohrova integrálu:
pole 𝑑𝑑𝑑𝑑 |
𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑íℎ𝑑𝑑𝑜𝑜𝑑𝑑í 𝑀𝑀𝑑𝑑(𝑑𝑑) 𝑚𝑚𝑑𝑑
(𝑢𝑢A)(𝑑𝑑)
A – B 𝑟𝑟 ∙ 𝑑𝑑𝜑𝜑| 0𝜋𝜋 2⁄ ϕsin⋅⋅+ rRAx ϕsin"1" ⋅⋅+ r
Mohrův integrál vyjadřující obecné „volné“ vodorovné posunutí bodu A bude:
∫ ⋅⋅⋅⋅
==∂∂
)(
)()(1
dssmsMJE
uRU
AfooAx
Ax
a po dosazení jednotlivých funkcí určených pro tento příklad:
[ ] [ ] [ ] TrJErRd
JErRdrrrR
JEAxAx
Ax ∆⋅⋅⋅=⋅⋅⋅
=⋅⋅⋅⋅
=⋅⋅⋅⋅⋅⋅⋅⋅⋅ ∫∫ 2
2πsinsin"1"sin1 3π
0
23π
0
αϕϕϕϕϕ .
Odtud již vychází velikost hledané (staticky neurčité) reakce:
2
4
2 π3π4
raET
rJETRAx ⋅⋅
⋅⋅∆⋅+=
⋅⋅⋅∆⋅⋅
+=αα .
Znaménko „+“ ve výsledku znamená, že zvolený směr reakce RAx odpovídá skutečnosti.
Maximální namáhání vzniká v horním a dolním krajním vlákně a to v nejvzdálenějším místě od nositelky síly RAx, tedy ve vrchním bodě (C):
raETrRM Axo ⋅⋅
⋅⋅∆⋅=⋅=
π3
4
maxα a
raET
WM
o
oo ⋅
⋅⋅∆⋅⋅==
π2max
maxασ .
tento křivý prut je tvořen částí kruhového
oblouku, proto použijeme přímo
řešení pomocí Mohrova integrálu.
∆T C
B A
∆T C
B A RAx
σo max
−σo max
C
ds
B A RAx "1"
dϕ
ϕ
R⋅sinϕ
A
∆T
C
B r

12
PŘÍKLAD 1.7 (KŘIVÝ PRUT – STATICKY NEURČITÝ):
Dáno: ∆T ; α ; a ; E⋅J = konst. Určit: Mo max (polohu a velikost maximálního ohybového momentu).
Řešení: Tato úloha je jedenkrát staticky neurčitá, protože kloubové podpěry odebírají po dvou stupních volnosti, ale rovinný křivý prut má jen 3 stupně volnosti (3 – 2 – 2 = –1).
Vzhledem k symetrii prutu stačí ale řešit pouze jeho jednu polovinu a tuto polovinu v ose symetrie vetknout (bod C) a v kloubové podpěře uvolnit (bod A), nahradit uvolněnou vazbu staticky neurčitým účinkem a doplnit deformační podmínku (ohřevem nevzniknou žádné reakce do směru y).
Bod A v základní staticky určité soustavě se může libovolně pohybovat ve vodorovném směru, ale původní soustava se vodorovně pohybovat nesměla. Tento fakt musí zajistit deformační podmínka:
𝑢𝑢A = 0 ≡ 𝑢𝑢A∆𝑇𝑇 − 𝑢𝑢A
𝑅𝑅A𝑥𝑥 = 0 ⟹ 𝑢𝑢A𝑅𝑅A𝑥𝑥 = 𝑢𝑢A
∆𝑇𝑇 = 𝛼𝛼 ∙𝑎𝑎2
∙ ∆𝑇𝑇 .
Pro výpočet deformace vyvolané silou RAx použijeme Mohrův integrál v polích A – B a A – C.
pole 𝑑𝑑𝑑𝑑 |
𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑íℎ𝑑𝑑𝑜𝑜𝑑𝑑í 𝑀𝑀𝑑𝑑(𝑑𝑑) 𝑚𝑚𝑑𝑑
(𝑢𝑢A)(𝑑𝑑)
A – B 𝑑𝑑𝑑𝑑 |
0𝑚𝑚 +𝑅𝑅A𝑚𝑚 ∙ 𝑑𝑑 +"1" ∙ 𝑑𝑑
B – C 𝑑𝑑𝑑𝑑 |
0𝑚𝑚 2⁄ +𝑅𝑅A𝑚𝑚 ∙ 𝑎𝑎 +"1" ∙ 𝑎𝑎
𝑢𝑢A𝑅𝑅A𝑥𝑥 =
1𝐸𝐸 ∙ 𝐽𝐽
∙ ��[+𝑅𝑅A𝑚𝑚 ∙ 𝑑𝑑] ∙ [+"1" ∙ 𝑑𝑑] ∙ [𝑑𝑑𝑑𝑑] + � [+𝑅𝑅A𝑚𝑚 ∙ 𝑎𝑎] ∙ [+"1" ∙ 𝑎𝑎] ∙ [𝑑𝑑𝑑𝑑]
𝑚𝑚 2⁄
0
𝑚𝑚
0
� = 𝛼𝛼 ∙𝑎𝑎2
∙ ∆𝑇𝑇 .
Z této rovnice již získáme staticky neurčitou veličinu:
𝑅𝑅A𝑚𝑚
𝐸𝐸 ∙ 𝐽𝐽∙ �
𝑎𝑎3
3+
𝑎𝑎3
2� = 𝛼𝛼 ∙
𝑎𝑎2
∙ ∆𝑇𝑇 ⟹ 𝑅𝑅A𝑚𝑚 =53
∙𝛼𝛼 ∙ 𝐸𝐸 ∙ 𝐽𝐽 ∙ ∆𝑇𝑇
𝑎𝑎2 .
Pro kontrolu provedeme rozměrovou analýzu získaného řešení:
[1][𝐾𝐾−1] ∙ [N ∙ mm−2] ∙ [mm4] ∙ [𝐾𝐾]
[m2] = [N]
Hledaný maximální ohybový moment Mo max vznikne v celé horní části tenkého křivého prutu (mezi body B – C – D):
𝑀𝑀𝑑𝑑 𝑚𝑚𝑚𝑚𝑚𝑚 = 𝑅𝑅A𝑚𝑚 ∙ 𝑎𝑎 =53
∙𝛼𝛼 ∙ 𝐸𝐸 ∙ 𝐽𝐽 ∙ ∆𝑇𝑇
𝑎𝑎 .
a
a
∆T
ξ
∆T
η
RAx
A
B C
A
B C
E
D ξ
η
“1“
A
B C
∆T
RAx·a
Pružnost a pevnost II ZS 2018/2019
13
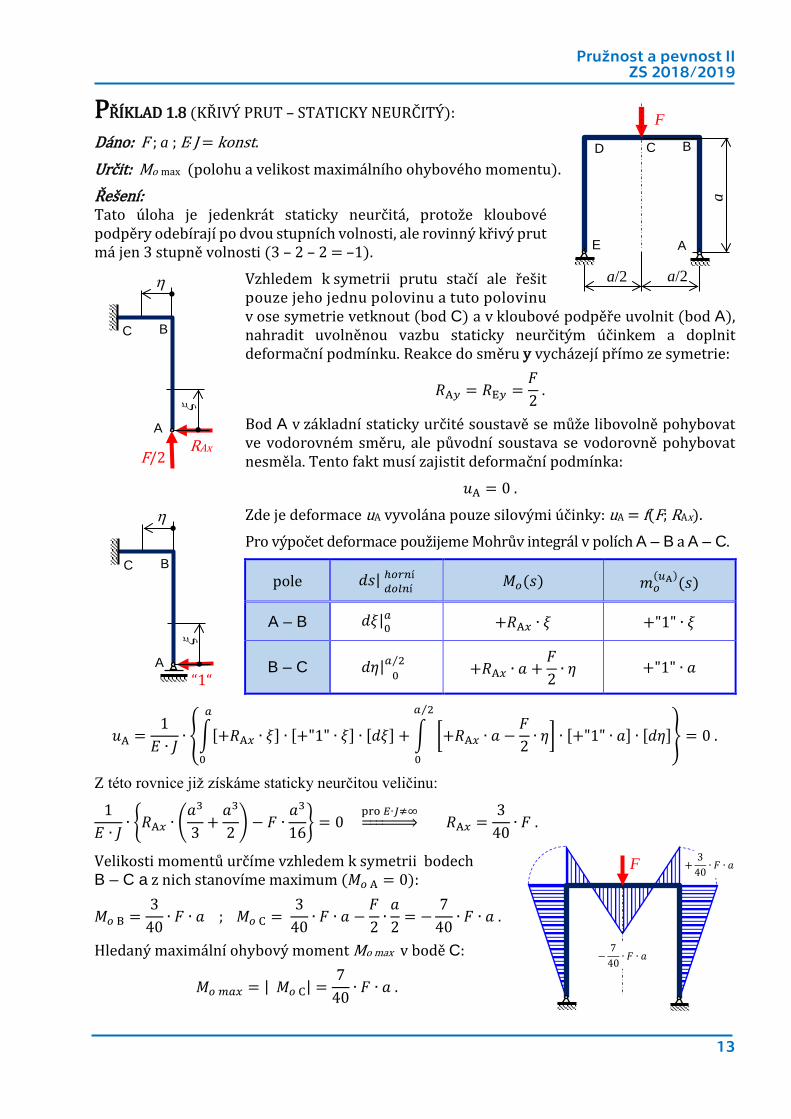
PŘÍKLAD 1.8 (KŘIVÝ PRUT – STATICKY NEURČITÝ):
Dáno: F ; a ; E⋅J = konst. Určit: Mo max (polohu a velikost maximálního ohybového momentu).
Řešení: Tato úloha je jedenkrát staticky neurčitá, protože kloubové podpěry odebírají po dvou stupních volnosti, ale rovinný křivý prut má jen 3 stupně volnosti (3 – 2 – 2 = –1).
Vzhledem k symetrii prutu stačí ale řešit pouze jeho jednu polovinu a tuto polovinu v ose symetrie vetknout (bod C) a v kloubové podpěře uvolnit (bod A), nahradit uvolněnou vazbu staticky neurčitým účinkem a doplnit deformační podmínku. Reakce do směru y vycházejí přímo ze symetrie:
𝑅𝑅A𝑦𝑦 = 𝑅𝑅E𝑦𝑦 =𝐹𝐹2
.
Bod A v základní staticky určité soustavě se může libovolně pohybovat ve vodorovném směru, ale původní soustava se vodorovně pohybovat nesměla. Tento fakt musí zajistit deformační podmínka:
𝑢𝑢A = 0 .
Zde je deformace uA vyvolána pouze silovými účinky: uA = f(F; RAx). Pro výpočet deformace použijeme Mohrův integrál v polích A – B a A – C.
pole 𝑑𝑑𝑑𝑑 |
𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑íℎ𝑑𝑑𝑜𝑜𝑑𝑑í 𝑀𝑀𝑑𝑑(𝑑𝑑) 𝑚𝑚𝑑𝑑
(𝑢𝑢A)(𝑑𝑑)
A – B 𝑑𝑑𝑑𝑑 |
0𝑚𝑚 +𝑅𝑅A𝑚𝑚 ∙ 𝑑𝑑 +"1" ∙ 𝑑𝑑
B – C 𝑑𝑑𝑑𝑑 |
0𝑚𝑚 2⁄ +𝑅𝑅A𝑚𝑚 ∙ 𝑎𝑎 +
𝐹𝐹2
∙ 𝑑𝑑 +"1" ∙ 𝑎𝑎
𝑢𝑢A =
1𝐸𝐸 ∙ 𝐽𝐽
∙ ��[+𝑅𝑅A𝑚𝑚 ∙ 𝑑𝑑] ∙ [+"1" ∙ 𝑑𝑑] ∙ [𝑑𝑑𝑑𝑑] + � �+𝑅𝑅A𝑚𝑚 ∙ 𝑎𝑎 −𝐹𝐹2
∙ 𝑑𝑑� ∙ [+"1" ∙ 𝑎𝑎] ∙ [𝑑𝑑𝑑𝑑]
𝑚𝑚 2⁄
0
𝑚𝑚
0
� = 0 .
Z této rovnice již získáme staticky neurčitou veličinu:
1𝐸𝐸 ∙ 𝐽𝐽
∙ �𝑅𝑅A𝑚𝑚 ∙ �𝑎𝑎3
3+
𝑎𝑎3
2� − 𝐹𝐹 ∙
𝑎𝑎3
16� = 0
pro 𝐸𝐸∙𝐽𝐽≠∞�������� 𝑅𝑅A𝑚𝑚 =
340
∙ 𝐹𝐹 .
Velikosti momentů určíme vzhledem k symetrii bodech B – C a z nich stanovíme maximum (𝑀𝑀𝑑𝑑 A = 0):
𝑀𝑀𝑑𝑑 B =3
40∙ 𝐹𝐹 ∙ 𝑎𝑎 ; 𝑀𝑀𝑑𝑑 C =
340
∙ 𝐹𝐹 ∙ 𝑎𝑎 −𝐹𝐹2
∙𝑎𝑎2
= −7
40∙ 𝐹𝐹 ∙ 𝑎𝑎 .
Hledaný maximální ohybový moment Mo max v bodě C:
𝑀𝑀𝑑𝑑 𝑚𝑚𝑚𝑚𝑚𝑚 = | 𝑀𝑀𝑑𝑑 C| =7
40∙ 𝐹𝐹 ∙ 𝑎𝑎 .
a
a/2 a/2
F
ξ
η
RAx
A
B C
A
B C
E
D
ξ
η
“1“
A
B C
F +3
40∙ 𝐹𝐹 ∙ 𝑎𝑎
−7
40∙ 𝐹𝐹 ∙ 𝑎𝑎
F/2
14
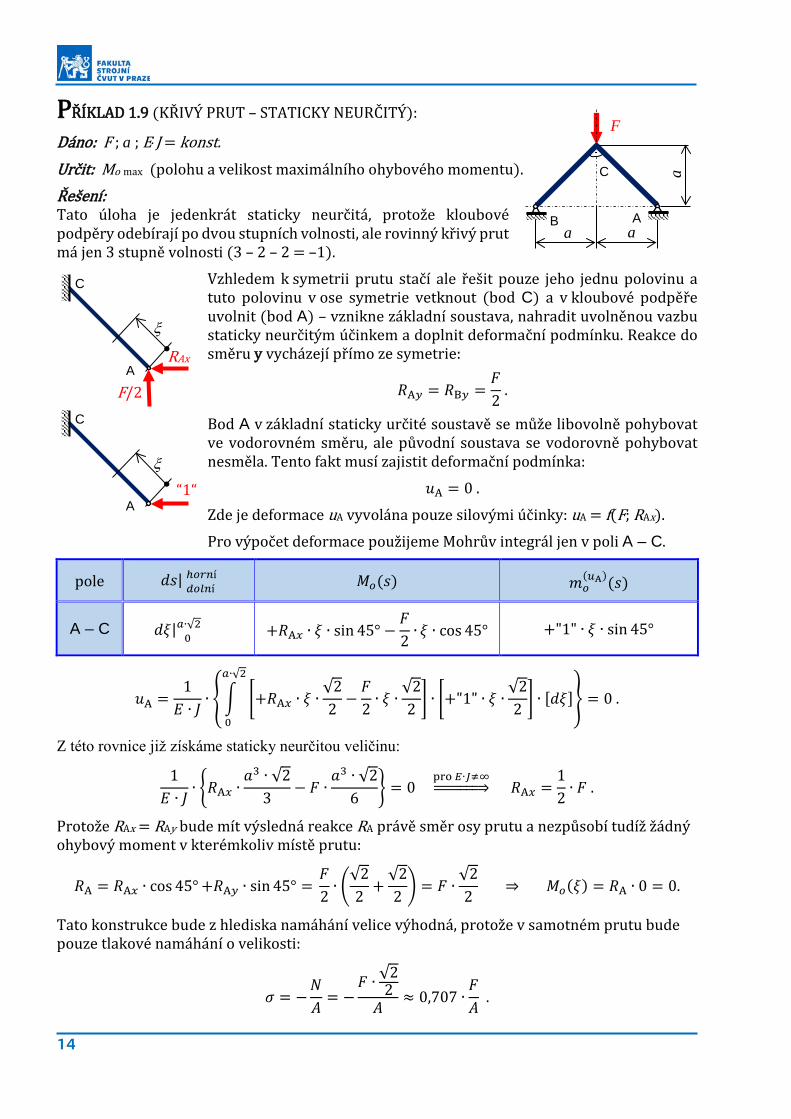
PŘÍKLAD 1.9 (KŘIVÝ PRUT – STATICKY NEURČITÝ):
Dáno: F ; a ; E⋅J = konst. Určit: Mo max (polohu a velikost maximálního ohybového momentu).
Řešení: Tato úloha je jedenkrát staticky neurčitá, protože kloubové podpěry odebírají po dvou stupních volnosti, ale rovinný křivý prut má jen 3 stupně volnosti (3 – 2 – 2 = –1).
Vzhledem k symetrii prutu stačí ale řešit pouze jeho jednu polovinu a tuto polovinu v ose symetrie vetknout (bod C) a v kloubové podpěře uvolnit (bod A) – vznikne základní soustava, nahradit uvolněnou vazbu staticky neurčitým účinkem a doplnit deformační podmínku. Reakce do směru y vycházejí přímo ze symetrie:
𝑅𝑅A𝑦𝑦 = 𝑅𝑅B𝑦𝑦 =𝐹𝐹2
.
Bod A v základní staticky určité soustavě se může libovolně pohybovat ve vodorovném směru, ale původní soustava se vodorovně pohybovat nesměla. Tento fakt musí zajistit deformační podmínka:
𝑢𝑢A = 0 .
Zde je deformace uA vyvolána pouze silovými účinky: uA = f(F; RAx). Pro výpočet deformace použijeme Mohrův integrál jen v poli A – C.
pole 𝑑𝑑𝑑𝑑 |
𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑íℎ𝑑𝑑𝑜𝑜𝑑𝑑í 𝑀𝑀𝑑𝑑(𝑑𝑑) 𝑚𝑚𝑑𝑑
(𝑢𝑢A)(𝑑𝑑)
A – C 𝑑𝑑𝑑𝑑 |
0𝑚𝑚∙√2 +𝑅𝑅A𝑚𝑚 ∙ 𝑑𝑑 ∙ sin 45° −
𝐹𝐹2
∙ 𝑑𝑑 ∙ cos 45° +"1" ∙ 𝑑𝑑 ∙ sin 45°
𝑢𝑢A =
1𝐸𝐸 ∙ 𝐽𝐽
∙ � � �+𝑅𝑅A𝑚𝑚 ∙ 𝑑𝑑 ∙√22
−𝐹𝐹2
∙ 𝑑𝑑 ∙√22
� ∙ �+"1" ∙ 𝑑𝑑 ∙√22
� ∙ [𝑑𝑑𝑑𝑑]𝑚𝑚∙√2
0
� = 0 .
Z této rovnice již získáme staticky neurčitou veličinu:
1𝐸𝐸 ∙ 𝐽𝐽
∙ �𝑅𝑅A𝑚𝑚 ∙𝑎𝑎3 ∙ √2
3− 𝐹𝐹 ∙
𝑎𝑎3 ∙ √26
� = 0 pro 𝐸𝐸∙𝐽𝐽≠∞�������� 𝑅𝑅A𝑚𝑚 =
12
∙ 𝐹𝐹 .
Protože RAx = RAy bude mít výsledná reakce RA právě směr osy prutu a nezpůsobí tudíž žádný ohybový moment v kterémkoliv místě prutu:
𝑅𝑅A = 𝑅𝑅A𝑚𝑚 ∙ cos 45° +𝑅𝑅A𝑦𝑦 ∙ sin 45° = 𝐹𝐹2
∙ �√22
+√22
� = 𝐹𝐹 ∙√22
⇒ 𝑀𝑀𝑑𝑑(𝑑𝑑) = 𝑅𝑅A ∙ 0 = 0.
Tato konstrukce bude z hlediska namáhání velice výhodná, protože v samotném prutu bude pouze tlakové namáhání o velikosti:
𝜎𝜎 = −𝑁𝑁𝐴𝐴
= −𝐹𝐹 ∙ √2
2𝐴𝐴
≈ 0,707 ∙𝐹𝐹𝐴𝐴
.
a
a a
F
A B
C
ξ
RAx
C
A F/2
ξ
C
A “1“
Pružnost a pevnost II ZS 2018/2019
15
F
r
E⋅J = konst.
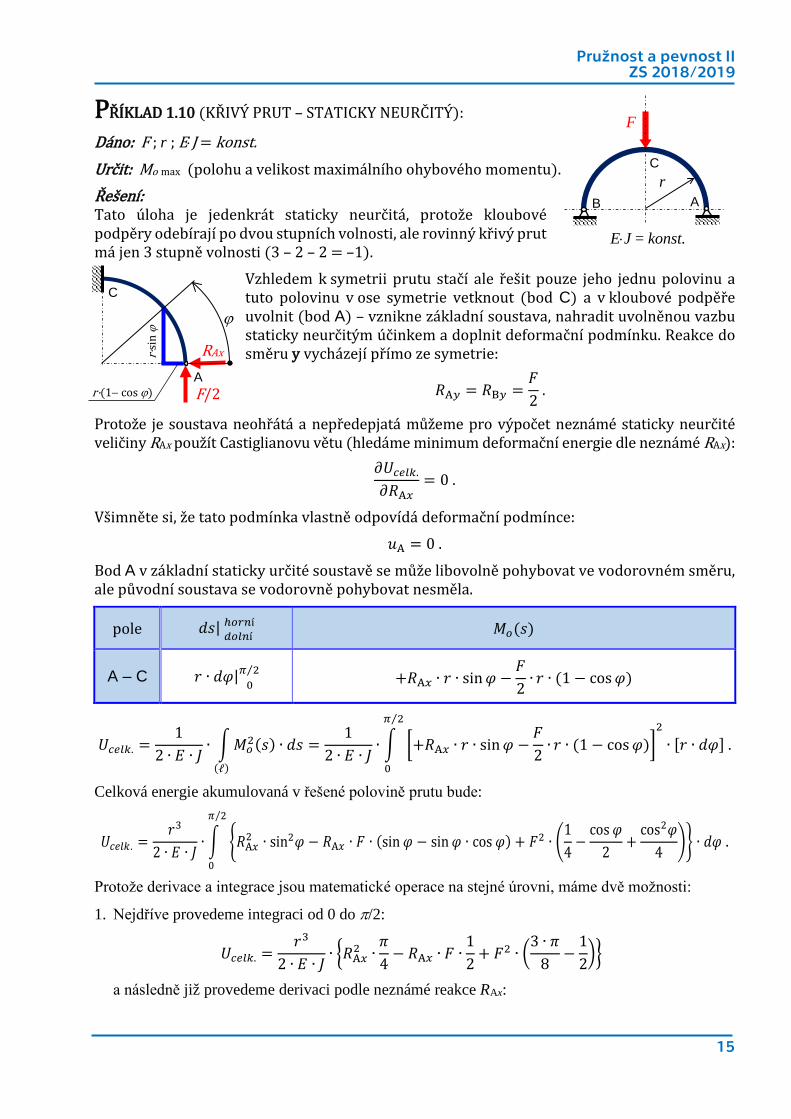
PŘÍKLAD 1.10 (KŘIVÝ PRUT – STATICKY NEURČITÝ):
Dáno: F ; r ; E⋅J = konst. Určit: Mo max (polohu a velikost maximálního ohybového momentu).
Řešení: Tato úloha je jedenkrát staticky neurčitá, protože kloubové podpěry odebírají po dvou stupních volnosti, ale rovinný křivý prut má jen 3 stupně volnosti (3 – 2 – 2 = –1).
Vzhledem k symetrii prutu stačí ale řešit pouze jeho jednu polovinu a tuto polovinu v ose symetrie vetknout (bod C) a v kloubové podpěře uvolnit (bod A) – vznikne základní soustava, nahradit uvolněnou vazbu staticky neurčitým účinkem a doplnit deformační podmínku. Reakce do směru y vycházejí přímo ze symetrie:
𝑅𝑅A𝑦𝑦 = 𝑅𝑅B𝑦𝑦 =𝐹𝐹2
.
Protože je soustava neohřátá a nepředepjatá můžeme pro výpočet neznámé staticky neurčité veličiny RAx použít Castiglianovu větu (hledáme minimum deformační energie dle neznámé RAx):
𝜕𝜕𝑈𝑈𝑐𝑐𝑐𝑐𝑑𝑑𝑐𝑐.
𝜕𝜕𝑅𝑅A𝑚𝑚= 0 .
Všimněte si, že tato podmínka vlastně odpovídá deformační podmínce:
𝑢𝑢A = 0 .
Bod A v základní staticky určité soustavě se může libovolně pohybovat ve vodorovném směru, ale původní soustava se vodorovně pohybovat nesměla.
pole 𝑑𝑑𝑑𝑑 |
𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑íℎ𝑑𝑑𝑜𝑜𝑑𝑑í 𝑀𝑀𝑑𝑑(𝑑𝑑)
A – C 𝑟𝑟 ∙ 𝑑𝑑𝜑𝜑 |
0𝜋𝜋 2⁄ +𝑅𝑅A𝑚𝑚 ∙ 𝑟𝑟 ∙ sin 𝜑𝜑 −
𝐹𝐹2
∙ 𝑟𝑟 ∙ (1 − cos 𝜑𝜑)
𝑈𝑈𝑐𝑐𝑐𝑐𝑑𝑑𝑐𝑐. =1
2 ∙ 𝐸𝐸 ∙ 𝐽𝐽∙ � 𝑀𝑀𝑑𝑑
2(𝑑𝑑) ∙ 𝑑𝑑𝑑𝑑
(ℓ)
=1
2 ∙ 𝐸𝐸 ∙ 𝐽𝐽∙ � �+𝑅𝑅A𝑚𝑚 ∙ 𝑟𝑟 ∙ sin 𝜑𝜑 −
𝐹𝐹2
∙ 𝑟𝑟 ∙ (1 − cos 𝜑𝜑)�2
𝜋𝜋 2⁄
0
∙ [𝑟𝑟 ∙ 𝑑𝑑𝜑𝜑] .
Celková energie akumulovaná v řešené polovině prutu bude:
𝑈𝑈𝑐𝑐𝑐𝑐𝑑𝑑𝑐𝑐. =𝑟𝑟3
2 ∙ 𝐸𝐸 ∙ 𝐽𝐽∙ � �𝑅𝑅A𝑚𝑚
2 ∙ sin2𝜑𝜑 − 𝑅𝑅A𝑚𝑚 ∙ 𝐹𝐹 ∙ (sin 𝜑𝜑 − sin 𝜑𝜑 ∙ cos 𝜑𝜑) + 𝐹𝐹2 ∙ �14
−cos 𝜑𝜑
2+
cos2𝜑𝜑4
�� ∙ 𝑑𝑑𝜑𝜑
𝜋𝜋 2⁄
0
.
Protože derivace a integrace jsou matematické operace na stejné úrovni, máme dvě možnosti:
1. Nejdříve provedeme integraci od 0 do π/2:
𝑈𝑈𝑐𝑐𝑐𝑐𝑑𝑑𝑐𝑐. =𝑟𝑟3
2 ∙ 𝐸𝐸 ∙ 𝐽𝐽∙ �𝑅𝑅A𝑚𝑚
2 ∙𝜋𝜋4
− 𝑅𝑅A𝑚𝑚 ∙ 𝐹𝐹 ∙12
+ 𝐹𝐹2 ∙ �3 ∙ 𝜋𝜋
8−
12
��
a následně již provedeme derivaci podle neznámé reakce RAx:
A B
C
ϕ
RAx
C
A F/2
r·sin
ϕ
r·(1− cos ϕ)
16
𝜕𝜕𝑈𝑈𝑐𝑐𝑐𝑐𝑑𝑑𝑐𝑐.
𝜕𝜕𝑅𝑅A𝑚𝑚=
𝑟𝑟3
2 ∙ 𝐸𝐸 ∙ 𝐽𝐽∙ �2 ∙ 𝑅𝑅A𝑚𝑚
∙𝜋𝜋4
− 𝐹𝐹 ∙12
+ 0� = 0
𝑜𝑜3
2∙𝐸𝐸∙𝐽𝐽≠0
����� 𝑅𝑅A𝑚𝑚 = +𝐹𝐹𝜋𝜋
.
2. Nejprve provedeme derivaci deformační energie podle neznámé reakce RAx:
𝜕𝜕𝑈𝑈𝑐𝑐𝑐𝑐𝑑𝑑𝑐𝑐.
𝜕𝜕𝑅𝑅A𝑚𝑚=
𝑟𝑟3
2 ∙ 𝐸𝐸 ∙ 𝐽𝐽∙ � {2 ∙ 𝑅𝑅A𝑚𝑚
∙ sin2𝜑𝜑 − 𝐹𝐹 ∙ (sin 𝜑𝜑 ∙ cos 𝜑𝜑 − sin 𝜑𝜑) + 0} ∙ 𝑑𝑑𝜑𝜑
𝜋𝜋 2⁄
0
= 0
a následně integrujeme výsledek 0 do π/2:
𝜕𝜕𝑈𝑈𝑐𝑐𝑐𝑐𝑑𝑑𝑐𝑐.
𝜕𝜕𝑅𝑅A𝑚𝑚=
𝑟𝑟3
2 ∙ 𝐸𝐸 ∙ 𝐽𝐽∙ �2 ∙ 𝑅𝑅A𝑚𝑚
∙𝜋𝜋2
− 𝐹𝐹 ∙12
� = 0
𝑜𝑜3
2∙𝐸𝐸∙𝐽𝐽≠0
����� 𝑅𝑅A𝑚𝑚 = +𝐹𝐹𝜋𝜋
.
Druhou možností výpočtu je použití Mohrova integrálu pro výpočet posuvu uA:
𝑢𝑢A =1
𝐸𝐸 ∙ 𝐽𝐽∙ � 𝑀𝑀𝑑𝑑(𝑑𝑑) ∙ 𝑚𝑚𝑑𝑑
(𝑢𝑢A)(𝑑𝑑) ∙ 𝑑𝑑𝑑𝑑
(ℓ)
.
pole 𝑑𝑑𝑑𝑑 |
𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑íℎ𝑑𝑑𝑜𝑜𝑑𝑑í 𝑀𝑀𝑑𝑑(𝑑𝑑) 𝑚𝑚𝑑𝑑
(𝑢𝑢A)(𝑑𝑑)
A – C 𝑟𝑟 ∙ 𝑑𝑑𝜑𝜑 |
0𝜋𝜋 2⁄ +𝑅𝑅A𝑚𝑚 ∙ 𝑟𝑟 ∙ sin 𝜑𝜑 −
𝐹𝐹2
∙ 𝑟𝑟 ∙ (1 − cos 𝜑𝜑) +"1" ∙ 𝑟𝑟 ∙ sin 𝜑𝜑
𝑢𝑢A =1
𝐸𝐸 ∙ 𝐽𝐽∙ � �+𝑅𝑅A𝑚𝑚 ∙ 𝑟𝑟 ∙ sin 𝜑𝜑 −
𝐹𝐹2
∙ 𝑟𝑟 ∙ (1 − cos 𝜑𝜑)� ∙ [+"1" ∙ 𝑟𝑟 ∙ sin 𝜑𝜑] ∙ [𝑟𝑟 ∙ 𝑑𝑑𝜑𝜑]
𝜋𝜋 2⁄
0
= 0 .
Pro 𝐸𝐸 ∙ 𝐽𝐽 ≠ ∞ dostáváme opět řešení ve tvaru:
𝑅𝑅A𝑚𝑚 ∙ 𝑟𝑟3 ∙𝜋𝜋4
− 𝐹𝐹 ∙ 𝑟𝑟3 ∙14
= 0 𝑜𝑜≠0��� 𝑅𝑅A𝑚𝑚 = +
𝐹𝐹𝜋𝜋
.
Průběh ohybového momentu podél prutu bude vyjádřen funkcí:
𝑀𝑀𝑑𝑑(𝜑𝜑) = 𝐹𝐹 ∙ 𝑟𝑟 ∙ �sin 𝜑𝜑
𝜋𝜋−
12
+cos 𝜑𝜑
2� .
Extrém této funkce v poli (0 ; π/2) najdeme pomocí derivace podle proměnného úhlu ϕ: 𝑑𝑑𝑀𝑀𝑑𝑑(𝜑𝜑)
𝑑𝑑𝜑𝜑= 0 ⇒ 𝐹𝐹 ∙ 𝑟𝑟 ∙ �
cos 𝜑𝜑𝜋𝜋
− 0 +−sin 𝜑𝜑
2� = 0
𝐹𝐹∙𝑜𝑜≠0����
sin 𝜑𝜑cos 𝜑𝜑
=2𝜋𝜋
⇒ 𝜑𝜑𝑐𝑐𝑚𝑚𝑒𝑒𝑜𝑜. ≈ 32,48° .
Odtud vychází maximální moment:
𝑀𝑀𝑑𝑑(𝜑𝜑𝑐𝑐𝑚𝑚𝑒𝑒𝑜𝑜.) = 𝐹𝐹 ∙ 𝑟𝑟 ∙ �sin 32,48°
𝜋𝜋−
12
+cos 32,48°
2� ≈ 0,0927 ∙ 𝐹𝐹 ∙ 𝑟𝑟 .
Dále ještě musíme stanovit hodnoty funkce Mo(ϕ) v krajních bodech intervalu 0 a π/2:
𝑀𝑀𝑑𝑑(0) = 0 a 𝑀𝑀𝑑𝑑(𝜋𝜋 2) = +𝑅𝑅A𝑚𝑚 ∙ 𝑟𝑟 −𝐹𝐹2
∙ 𝑟𝑟 = 𝐹𝐹 ∙ 𝑟𝑟 ∙ �1𝜋𝜋
−12
� ≈ −0,1817 ∙ 𝐹𝐹 ∙ 𝑟𝑟 .�
Maximální moment na tomto křivém prutu bude pod silou F (bod C):
𝑀𝑀𝑑𝑑 𝑚𝑚𝑚𝑚𝑚𝑚 = 𝑚𝑚𝑎𝑎𝑚𝑚(𝑀𝑀𝑑𝑑(𝜑𝜑𝑐𝑐𝑚𝑚𝑒𝑒𝑜𝑜. ; |𝑀𝑀𝑑𝑑(𝜋𝜋 2⁄ |) = 0,1817 ∙ 𝐹𝐹 ∙ 𝑟𝑟 .
Pružnost a pevnost II ZS 2018/2019
17
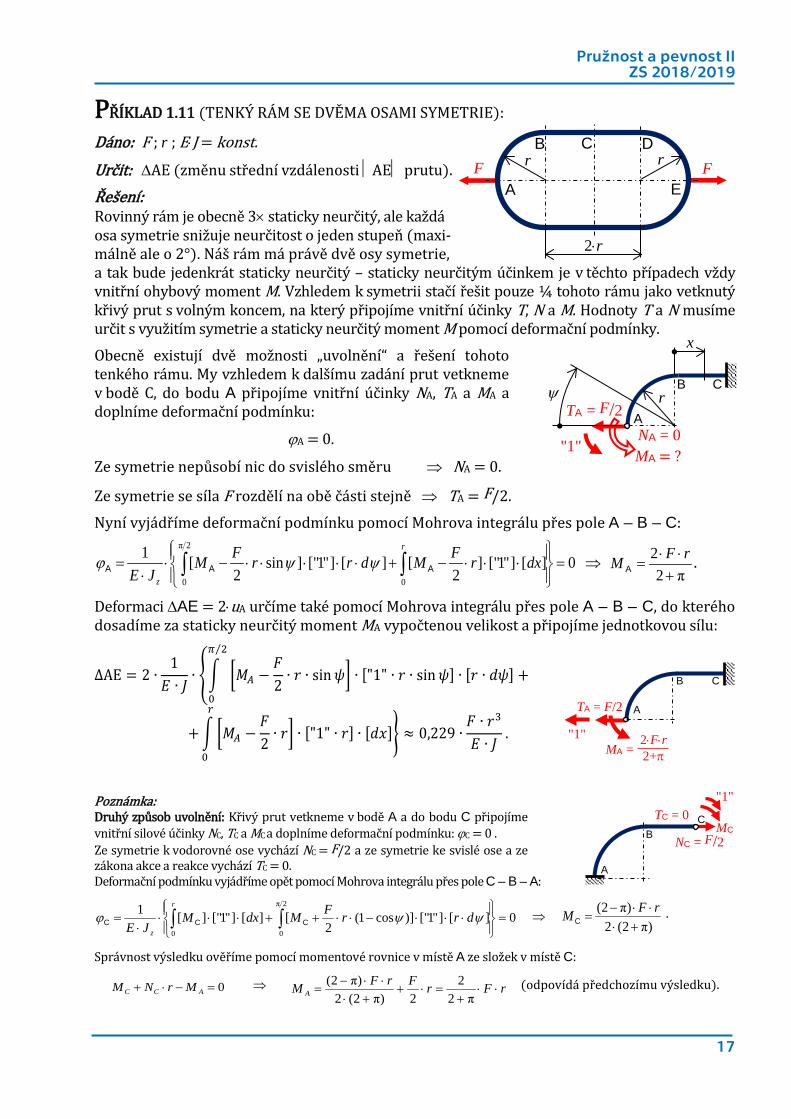
PŘÍKLAD 1.11 (TENKÝ RÁM SE DVĚMA OSAMI SYMETRIE):
Dáno: F ; r ; E⋅J = konst. Určit: ∆AE (změnu střední vzdálenosti AE prutu).
Řešení: Rovinný rám je obecně 3× staticky neurčitý, ale každá osa symetrie snižuje neurčitost o jeden stupeň (maxi- málně ale o 2°). Náš rám má právě dvě osy symetrie, a tak bude jedenkrát staticky neurčitý – staticky neurčitým účinkem je v těchto případech vždy vnitřní ohybový moment M. Vzhledem k symetrii stačí řešit pouze ¼ tohoto rámu jako vetknutý křivý prut s volným koncem, na který připojíme vnitřní účinky T, N a M. Hodnoty T a N musíme určit s využitím symetrie a staticky neurčitý moment M pomocí deformační podmínky.
Obecně existují dvě možnosti „uvolnění“ a řešení tohoto tenkého rámu. My vzhledem k dalšímu zadání prut vetkneme v bodě C, do bodu A připojíme vnitřní účinky NA, TA a MA a doplníme deformační podmínku:
ϕA = 0.
Ze symetrie nepůsobí nic do svislého směru ⇒ NA = 0.
Ze symetrie se síla F rozdělí na obě části stejně ⇒ TA = F/2.
Nyní vyjádříme deformační podmínku pomocí Mohrova integrálu přes pole A – B – C:
0][]"1["]2
[][]"1["]sin2
[1
0
2π
0
=
⋅⋅⋅−+⋅⋅⋅⋅⋅−⋅⋅
= ∫∫r
z
dxrFMdrrFMJE AAA ψψϕ ⇒
π22
+⋅⋅
=rFM A .
Deformaci ∆AE = 2⋅uA určíme také pomocí Mohrova integrálu přes pole A – B – C, do kterého dosadíme za staticky neurčitý moment MA vypočtenou velikost a připojíme jednotkovou sílu:
∆AE = 2 ∙1
𝐸𝐸 ∙ 𝐽𝐽∙ �� �𝑀𝑀𝐴𝐴 −
𝐹𝐹2
∙ 𝑟𝑟 ∙ sin 𝑑𝑑� ∙ ["1" ∙ 𝑟𝑟 ∙ sin 𝑑𝑑] ∙ [𝑟𝑟 ∙ 𝑑𝑑𝑑𝑑]
𝜋𝜋 2⁄
0
+
+ � �𝑀𝑀𝐴𝐴 −𝐹𝐹2
∙ 𝑟𝑟� ∙ ["1" ∙ 𝑟𝑟] ∙ [𝑑𝑑𝑚𝑚]𝑜𝑜
0
� ≈ 0,229 ∙𝐹𝐹 ∙ 𝑟𝑟3
𝐸𝐸 ∙ 𝐽𝐽 .
Poznámka: Druhý způsob uvolnění: Křivý prut vetkneme v bodě A a do bodu C připojíme vnitřní silové účinky NC, TC a MC a doplníme deformační podmínku: ϕC = 0 . Ze symetrie k vodorovné ose vychází NC = F/2 a ze symetrie ke svislé ose a ze zákona akce a reakce vychází TC = 0. Deformační podmínku vyjádříme opět pomocí Mohrova integrálu přes pole C – B – A:
0][]"1[")]cos1(2
[][]"1["][1 2π
00
=
⋅⋅⋅−⋅⋅++⋅⋅⋅⋅
= ∫∫ ψψϕ drrFMdxMJE
r
zCCC
⇒ )π2(2
)π2(+⋅
⋅⋅−=
rFMC .
Správnost výsledku ověříme pomocí momentové rovnice v místě A ze složek v místě C:
0=−⋅+ ACC MrNM ⇒ rFrFrFM A ⋅⋅+
=⋅++⋅
⋅⋅−=
π22
2)π2(2)π2( (odpovídá předchozímu výsledku).
2⋅r
r r F F A
B C D
E
B NC = F/2 MC
TC = 0
A
C
"1"
B
NA = 0 MA = ?
TA = F/2 A
C ψ
x
"1"
r
B
TA = F/2
C
"1"
A
MA = 2⋅F⋅r 2+π
18
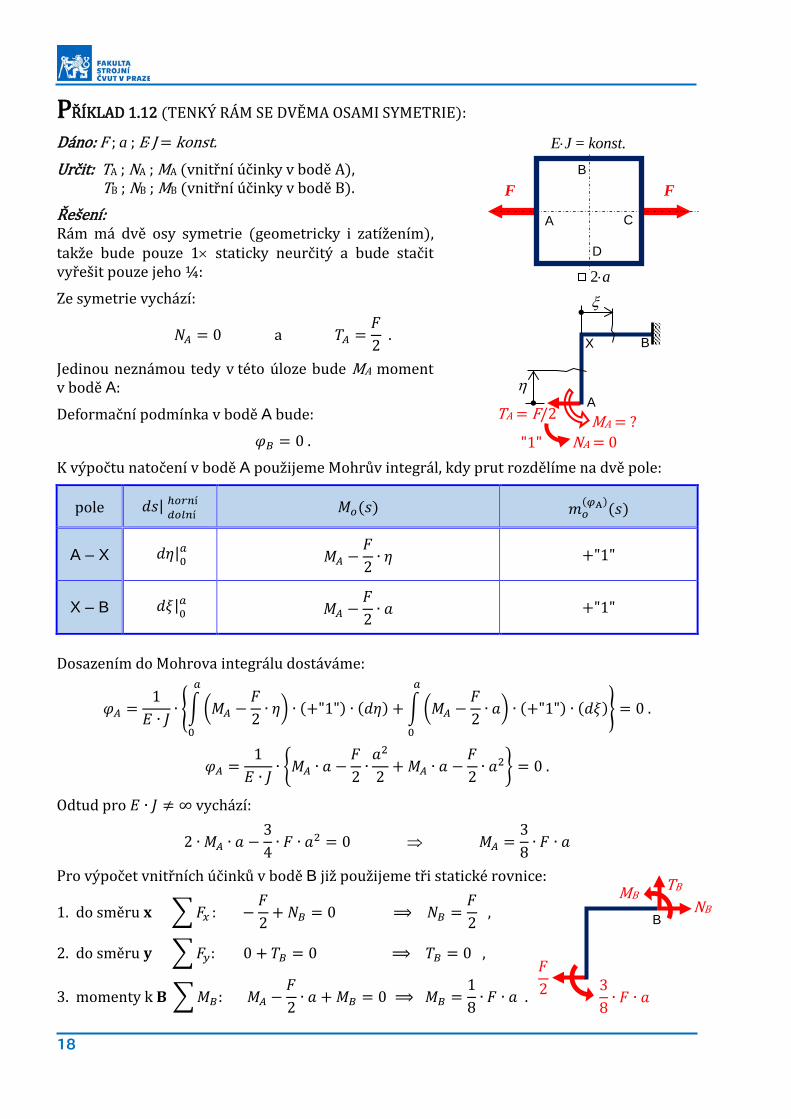
PŘÍKLAD 1.12 (TENKÝ RÁM SE DVĚMA OSAMI SYMETRIE):
Dáno: F ; a ; E⋅J = konst. Určit: TA ; NA ; MA (vnitřní účinky v bodě A), TB ; NB ; MB (vnitřní účinky v bodě B).
Řešení: Rám má dvě osy symetrie (geometricky i zatížením), takže bude pouze 1× staticky neurčitý a bude stačit vyřešit pouze jeho ¼:
Ze symetrie vychází:
𝑁𝑁𝐴𝐴 = 0 a 𝑇𝑇𝐴𝐴 =𝐹𝐹2
.
Jedinou neznámou tedy v této úloze bude MA moment v bodě A:
Deformační podmínka v bodě A bude:
𝜑𝜑𝐵𝐵 = 0 .
K výpočtu natočení v bodě A použijeme Mohrův integrál, kdy prut rozdělíme na dvě pole:
pole 𝑑𝑑𝑑𝑑 |
𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑íℎ𝑑𝑑𝑜𝑜𝑑𝑑í 𝑀𝑀𝑑𝑑(𝑑𝑑) 𝑚𝑚𝑑𝑑
(𝜑𝜑A)(𝑑𝑑)
A – X 𝑑𝑑𝑑𝑑 |
0𝑚𝑚 𝑀𝑀𝐴𝐴 −
𝐹𝐹2
∙ 𝑑𝑑 +"1"
X – B 𝑑𝑑𝑑𝑑 |
0𝑚𝑚 𝑀𝑀𝐴𝐴 −
𝐹𝐹2
∙ 𝑎𝑎 +"1"
Dosazením do Mohrova integrálu dostáváme:
𝜑𝜑𝐴𝐴 =1
𝐸𝐸 ∙ 𝐽𝐽∙ �� �𝑀𝑀𝐴𝐴 −
𝐹𝐹2
∙ 𝑑𝑑� ∙ (+"1") ∙ (𝑑𝑑𝑑𝑑)𝑚𝑚
0
+ � �𝑀𝑀𝐴𝐴 −𝐹𝐹2
∙ 𝑎𝑎� ∙ (+"1") ∙ (𝑑𝑑𝑑𝑑)𝑚𝑚
0
� = 0 .
𝜑𝜑𝐴𝐴 =1
𝐸𝐸 ∙ 𝐽𝐽∙ �𝑀𝑀𝐴𝐴 ∙ 𝑎𝑎 −
𝐹𝐹2
∙𝑎𝑎2
2+ 𝑀𝑀𝐴𝐴 ∙ 𝑎𝑎 −
𝐹𝐹2
∙ 𝑎𝑎2� = 0 .
Odtud pro 𝐸𝐸 ∙ 𝐽𝐽 ≠ ∞ vychází:
2 ∙ 𝑀𝑀𝐴𝐴 ∙ 𝑎𝑎 −34
∙ 𝐹𝐹 ∙ 𝑎𝑎2 = 0 ⇒ 𝑀𝑀𝐴𝐴 =38
∙ 𝐹𝐹 ∙ 𝑎𝑎
Pro výpočet vnitřních účinků v bodě B již použijeme tři statické rovnice:
1. do směru 𝐱𝐱 � 𝐹𝐹𝑚𝑚 : −𝐹𝐹2
+ 𝑁𝑁𝐵𝐵 = 0 ⟹ 𝑁𝑁𝐵𝐵 =𝐹𝐹2
,
2. do směru 𝐲𝐲 � 𝐹𝐹𝑦𝑦: 0 + 𝑇𝑇𝐵𝐵 = 0 ⟹ 𝑇𝑇𝐵𝐵 = 0 ,
3. momenty k 𝐁𝐁 � 𝑀𝑀𝐵𝐵: 𝑀𝑀𝐴𝐴 −𝐹𝐹2
∙ 𝑎𝑎 + 𝑀𝑀𝐵𝐵 = 0 ⟹ 𝑀𝑀𝐵𝐵 =18
∙ 𝐹𝐹 ∙ 𝑎𝑎 .
E⋅J = konst.
F F
C A
B
D
2⋅a
A
B X
38
∙ 𝐹𝐹 ∙ 𝑎𝑎
𝐹𝐹2
NB MB TB
B
MA = ? TA = F/2
NA = 0
η
ξ
"1"

Pružnost a pevnost II ZS 2018/2019
19
PŘÍKLAD 1.13 (TENKÝ RÁM SE DVĚMA OSAMI SYMETRIE):
Dáno: a ; qo ; E⋅J = konst. Určit: TA ; NA ; MA (vnitřní účinky v bodě A).
Řešení: Rám má dvě osy symetrie (geometricky i zatížením), takže bude pouze 1× staticky neurčitý a bude stačit vyřešit pouze jeho ¼:
Ze symetrie do vodorovného a svislého směru vychází:
𝑁𝑁𝐴𝐴 = 0 a 𝑇𝑇𝐴𝐴 = 0 .
Jedinou neznámou tedy v této úloze bude MA moment v bodě A:
Deformační podmínka v bodě A bude:
𝜑𝜑𝐴𝐴 = 0 .
K výpočtu natočení v bodě A použijeme Mohrův integrál, kdy prut rozdělíme na dvě pole A – X a X – B:
pole 𝑑𝑑𝑑𝑑 |
𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑íℎ𝑑𝑑𝑜𝑜𝑑𝑑í 𝑀𝑀𝑑𝑑(𝑑𝑑) 𝑚𝑚𝑑𝑑
(𝜑𝜑A)(𝑑𝑑)
A – X 𝑑𝑑𝑑𝑑 |
0𝑚𝑚 𝑀𝑀𝐴𝐴 − 𝑞𝑞𝑑𝑑 ∙
𝑑𝑑2
2 +"1"
X – B 𝑑𝑑𝑑𝑑 |
0𝑚𝑚 𝑀𝑀𝐴𝐴 − 𝑞𝑞𝑑𝑑 ∙
𝑎𝑎2
2 +"1"
Dosazením do Mohrova integrálu dostáváme:
𝜑𝜑𝐴𝐴 =1
𝐸𝐸 ∙ 𝐽𝐽∙ �� �𝑀𝑀𝐴𝐴 − 𝑞𝑞𝑑𝑑 ∙
𝑑𝑑2
2� ∙ (+"1") ∙ (𝑑𝑑𝑑𝑑)
𝑚𝑚
0
+ � �𝑀𝑀𝐴𝐴 − 𝑞𝑞𝑑𝑑 ∙𝑎𝑎2
2� ∙ (+"1") ∙ (𝑑𝑑𝑑𝑑)
𝑚𝑚
0
� = 0 .
𝜑𝜑𝐴𝐴 =1
𝐸𝐸 ∙ 𝐽𝐽∙ �𝑀𝑀𝐴𝐴 ∙ 𝑎𝑎 − 𝑞𝑞𝑑𝑑 ∙
𝑎𝑎3
6+ 𝑀𝑀𝐴𝐴 ∙ 𝑎𝑎 − 𝑞𝑞𝑑𝑑 ∙
𝑎𝑎3
2� = 0 .
Odtud pro 𝐸𝐸 ∙ 𝐽𝐽 ≠ ∞ vychází:
2 ∙ 𝑀𝑀𝐴𝐴 ∙ 𝑎𝑎 −46
∙ 𝑞𝑞𝑑𝑑 ∙ 𝑎𝑎3 = 0 ⇒ 𝑀𝑀𝐴𝐴 =13
∙ 𝑞𝑞𝑑𝑑 ∙ 𝑎𝑎2
Pro výpočet vnitřních účinků v bodě B již použijeme tři statické rovnice:
1. do směru 𝐱𝐱 � 𝐹𝐹𝑚𝑚 : − 𝑞𝑞𝑑𝑑 ∙ 𝑎𝑎 + 𝑁𝑁𝐵𝐵 = 0 ⟹ 𝑁𝑁𝐵𝐵 = 𝑞𝑞𝑑𝑑 ∙ 𝑎𝑎 ,
2. do směru 𝐲𝐲 � 𝐹𝐹𝑦𝑦: 0 + 𝑇𝑇𝐵𝐵 = 0 ⟹ 𝑇𝑇𝐵𝐵 = 0 ,
3. momenty k 𝐁𝐁 � 𝑀𝑀𝐵𝐵: 𝑀𝑀𝐴𝐴 − 𝑞𝑞𝑑𝑑 ∙𝑎𝑎2
2+ 𝑀𝑀𝐵𝐵 = 0 ⟹ 𝑀𝑀𝐵𝐵 =
16
∙ 𝑞𝑞𝑑𝑑 ∙𝑎𝑎2
2 .
E⋅J = konst.
2⋅a
qo qo
2⋅a
B
MA = ? TA = 0 NA = 0
η
ξ
"1"
qo
A
B X
13
∙ 𝒒𝒒𝒐𝒐 ∙ 𝑎𝑎2
NB MB TB
B qo
A
20
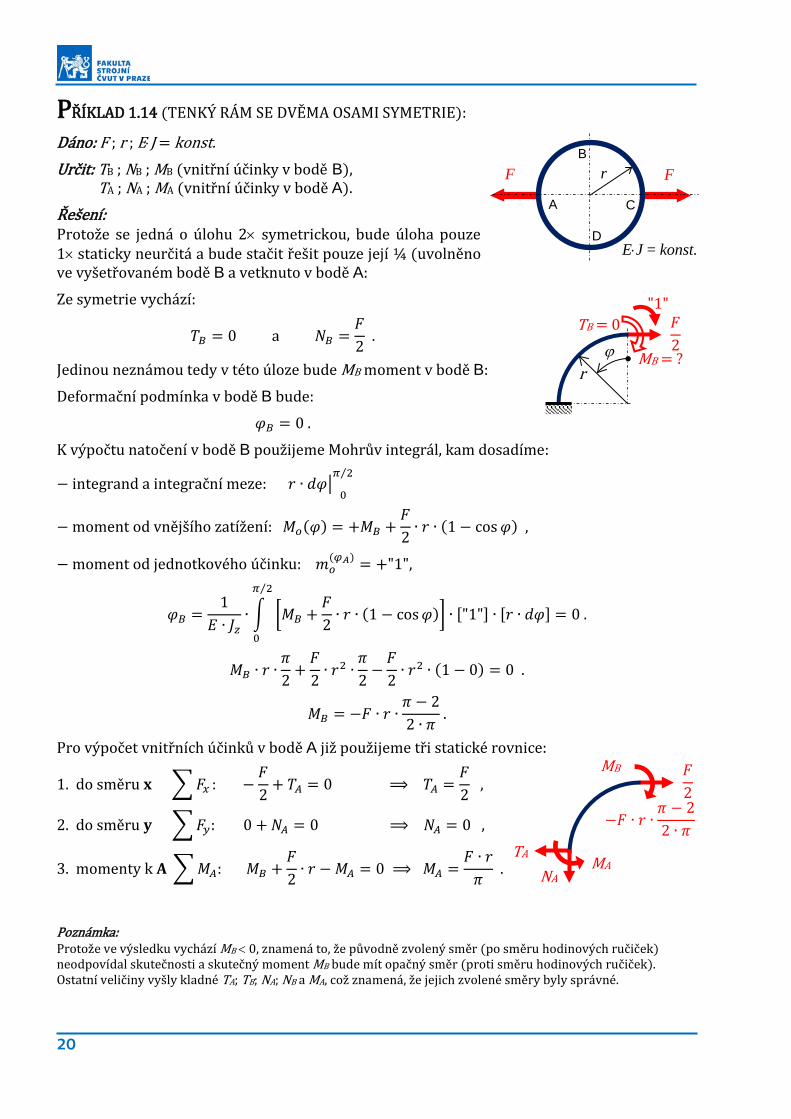
PŘÍKLAD 1.14 (TENKÝ RÁM SE DVĚMA OSAMI SYMETRIE):
Dáno: F ; r ; E⋅J = konst. Určit: TB ; NB ; MB (vnitřní účinky v bodě B),
TA ; NA ; MA (vnitřní účinky v bodě A).
Řešení: Protože se jedná o úlohu 2× symetrickou, bude úloha pouze 1× staticky neurčitá a bude stačit řešit pouze její ¼ (uvolněno ve vyšetřovaném bodě B a vetknuto v bodě A:
Ze symetrie vychází:
𝑇𝑇𝐵𝐵 = 0 a 𝑁𝑁𝐵𝐵 =𝐹𝐹2
.
Jedinou neznámou tedy v této úloze bude MB moment v bodě B:
Deformační podmínka v bodě B bude:
𝜑𝜑𝐵𝐵 = 0 .
K výpočtu natočení v bodě B použijeme Mohrův integrál, kam dosadíme:
− integrand a integrační meze: 𝑟𝑟 ∙ 𝑑𝑑𝜑𝜑�
0
𝜋𝜋 2⁄
− moment od vnějšího zatížení: 𝑀𝑀𝑑𝑑(𝜑𝜑) = +𝑀𝑀𝐵𝐵 +𝐹𝐹2
∙ 𝑟𝑟 ∙ (1 − cos 𝜑𝜑) ,
− moment od jednotkového účinku: 𝑚𝑚𝑑𝑑(𝜑𝜑𝐴𝐴) = +"1",
𝜑𝜑𝐵𝐵 =1
𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧∙ � �𝑀𝑀𝐵𝐵 +
𝐹𝐹2
∙ 𝑟𝑟 ∙ (1 − cos 𝜑𝜑)� ∙ ["1"] ∙ [𝑟𝑟 ∙ 𝑑𝑑𝜑𝜑]
𝜋𝜋 2⁄
0
= 0 .
𝑀𝑀𝐵𝐵 ∙ 𝑟𝑟 ∙𝜋𝜋2
+𝐹𝐹2
∙ 𝑟𝑟2 ∙𝜋𝜋2
−𝐹𝐹2
∙ 𝑟𝑟2 ∙ (1 − 0) = 0 .
𝑀𝑀𝐵𝐵 = −𝐹𝐹 ∙ 𝑟𝑟 ∙𝜋𝜋 − 22 ∙ 𝜋𝜋
.
Pro výpočet vnitřních účinků v bodě A již použijeme tři statické rovnice:
1. do směru 𝐱𝐱 � 𝐹𝐹𝑚𝑚 : −𝐹𝐹2
+ 𝑇𝑇𝐴𝐴 = 0 ⟹ 𝑇𝑇𝐴𝐴 =𝐹𝐹2
,
2. do směru 𝐲𝐲 � 𝐹𝐹𝑦𝑦: 0 + 𝑁𝑁𝐴𝐴 = 0 ⟹ 𝑁𝑁𝐴𝐴 = 0 ,
3. momenty k 𝐀𝐀 � 𝑀𝑀𝐴𝐴: 𝑀𝑀𝐵𝐵 +𝐹𝐹2
∙ 𝑟𝑟 − 𝑀𝑀𝐴𝐴 = 0 ⟹ 𝑀𝑀𝐴𝐴 =𝐹𝐹 ∙ 𝑟𝑟
𝜋𝜋 .
Poznámka: Protože ve výsledku vychází MB < 0, znamená to, že původně zvolený směr (po směru hodinových ručiček) neodpovídal skutečnosti a skutečný moment MB bude mít opačný směr (proti směru hodinových ručiček). Ostatní veličiny vyšly kladné TA; TB; NA; NB a MA, což znamená, že jejich zvolené směry byly správné.
E⋅J = konst.
r F F
C A
B
D
−𝐹𝐹 ∙ 𝑟𝑟 ∙𝜋𝜋 − 22 ∙ 𝜋𝜋
𝐹𝐹2
TA
MB
NA MA
𝐹𝐹2
TB = 0
MB = ? ϕ r
"1"
Pružnost a pevnost II ZS 2018/2019
21
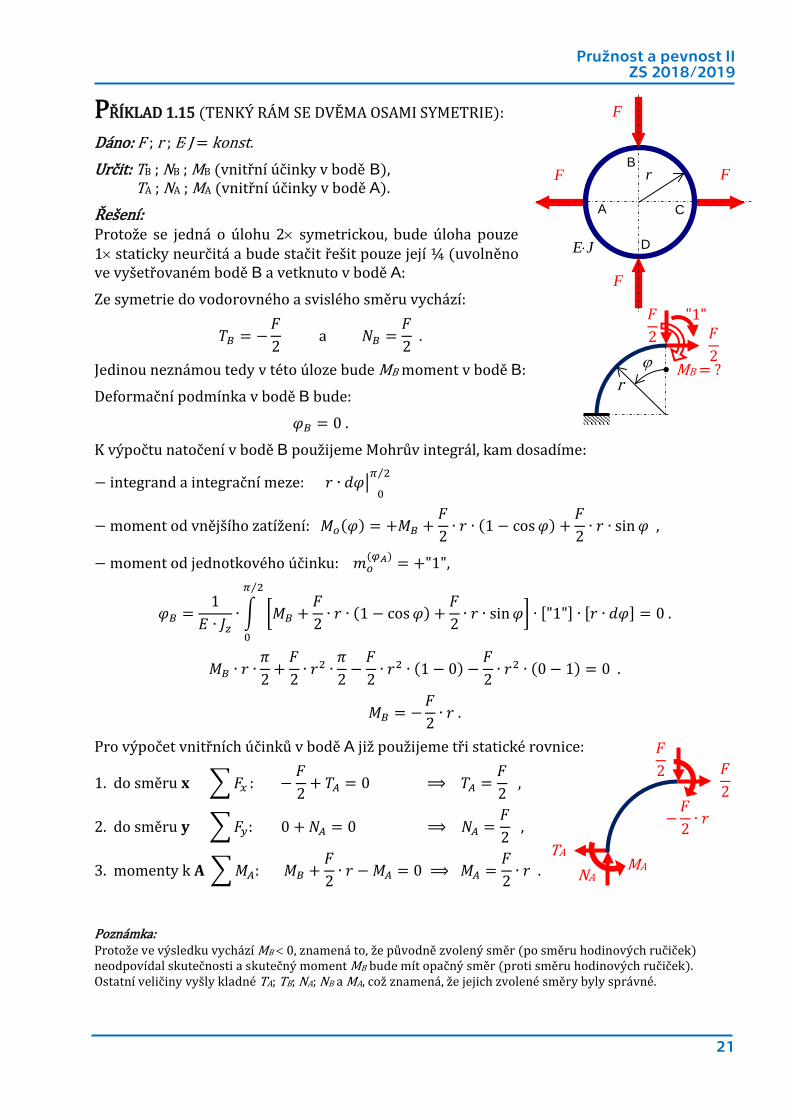
PŘÍKLAD 1.15 (TENKÝ RÁM SE DVĚMA OSAMI SYMETRIE):
Dáno: F ; r ; E⋅J = konst. Určit: TB ; NB ; MB (vnitřní účinky v bodě B),
TA ; NA ; MA (vnitřní účinky v bodě A).
Řešení: Protože se jedná o úlohu 2× symetrickou, bude úloha pouze 1× staticky neurčitá a bude stačit řešit pouze její ¼ (uvolněno ve vyšetřovaném bodě B a vetknuto v bodě A:
Ze symetrie do vodorovného a svislého směru vychází:
𝑇𝑇𝐵𝐵 = −𝐹𝐹2
a 𝑁𝑁𝐵𝐵 =𝐹𝐹2
.
Jedinou neznámou tedy v této úloze bude MB moment v bodě B:
Deformační podmínka v bodě B bude:
𝜑𝜑𝐵𝐵 = 0 .
K výpočtu natočení v bodě B použijeme Mohrův integrál, kam dosadíme:
− integrand a integrační meze: 𝑟𝑟 ∙ 𝑑𝑑𝜑𝜑
�
0
𝜋𝜋 2⁄
− moment od vnějšího zatížení: 𝑀𝑀𝑑𝑑(𝜑𝜑) = +𝑀𝑀𝐵𝐵 +𝐹𝐹2
∙ 𝑟𝑟 ∙ (1 − cos 𝜑𝜑) +𝐹𝐹2
∙ 𝑟𝑟 ∙ sin 𝜑𝜑 ,
− moment od jednotkového účinku: 𝑚𝑚𝑑𝑑(𝜑𝜑𝐴𝐴) = +"1",
𝜑𝜑𝐵𝐵 =1
𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧∙ � �𝑀𝑀𝐵𝐵 +
𝐹𝐹2
∙ 𝑟𝑟 ∙ (1 − cos 𝜑𝜑) +𝐹𝐹2
∙ 𝑟𝑟 ∙ sin 𝜑𝜑� ∙ ["1"] ∙ [𝑟𝑟 ∙ 𝑑𝑑𝜑𝜑]
𝜋𝜋 2⁄
0
= 0 .
𝑀𝑀𝐵𝐵 ∙ 𝑟𝑟 ∙𝜋𝜋2
+𝐹𝐹2
∙ 𝑟𝑟2 ∙𝜋𝜋2
−𝐹𝐹2
∙ 𝑟𝑟2 ∙ (1 − 0) −𝐹𝐹2
∙ 𝑟𝑟2 ∙ (0 − 1) = 0 .
𝑀𝑀𝐵𝐵 = −𝐹𝐹2
∙ 𝑟𝑟 .
Pro výpočet vnitřních účinků v bodě A již použijeme tři statické rovnice:
1. do směru 𝐱𝐱 � 𝐹𝐹𝑚𝑚 : −𝐹𝐹2
+ 𝑇𝑇𝐴𝐴 = 0 ⟹ 𝑇𝑇𝐴𝐴 =𝐹𝐹2
,
2. do směru 𝐲𝐲 � 𝐹𝐹𝑦𝑦: 0 + 𝑁𝑁𝐴𝐴 = 0 ⟹ 𝑁𝑁𝐴𝐴 =𝐹𝐹2
,
3. momenty k 𝐀𝐀 � 𝑀𝑀𝐴𝐴: 𝑀𝑀𝐵𝐵 +𝐹𝐹2
∙ 𝑟𝑟 − 𝑀𝑀𝐴𝐴 = 0 ⟹ 𝑀𝑀𝐴𝐴 =𝐹𝐹2
∙ 𝑟𝑟 .
Poznámka: Protože ve výsledku vychází MB < 0, znamená to, že původně zvolený směr (po směru hodinových ručiček) neodpovídal skutečnosti a skutečný moment MB bude mít opačný směr (proti směru hodinových ručiček). Ostatní veličiny vyšly kladné TA; TB; NA; NB a MA, což znamená, že jejich zvolené směry byly správné.
E⋅J
r F F
F
F
C A
B
D
−𝐹𝐹2
∙ 𝑟𝑟
𝐹𝐹2
TA NA MA
𝐹𝐹2
MB = ? ϕ
r
"1" 𝐹𝐹2
𝐹𝐹2
22
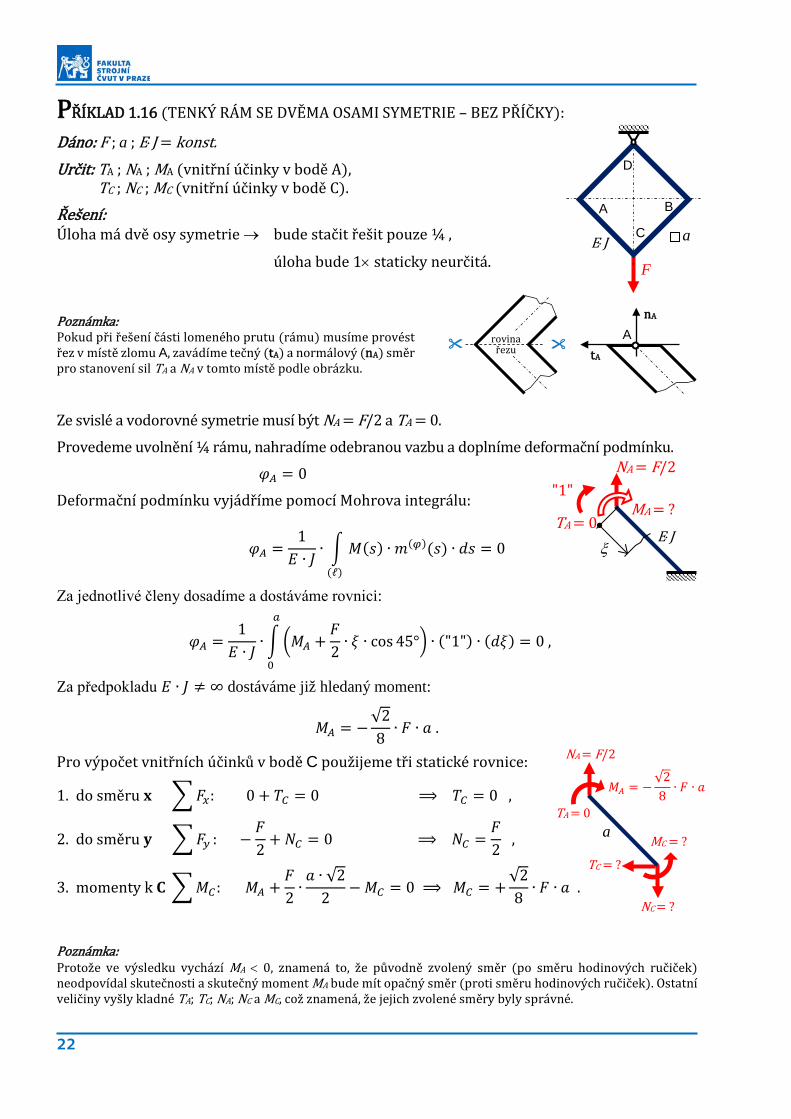
PŘÍKLAD 1.16 (TENKÝ RÁM SE DVĚMA OSAMI SYMETRIE – BEZ PŘÍČKY):
Dáno: F ; a ; E⋅J = konst. Určit: TA ; NA ; MA (vnitřní účinky v bodě A),
TC ; NC ; MC (vnitřní účinky v bodě C).
Řešení: Úloha má dvě osy symetrie → bude stačit řešit pouze ¼ ,
úloha bude 1× staticky neurčitá.
Poznámka: Pokud při řešení části lomeného prutu (rámu) musíme provést řez v místě zlomu A, zavádíme tečný (tA) a normálový (nA) směr pro stanovení sil TA a NA v tomto místě podle obrázku.
Ze svislé a vodorovné symetrie musí být NA = F/2 a TA = 0.
Provedeme uvolnění ¼ rámu, nahradíme odebranou vazbu a doplníme deformační podmínku.
𝜑𝜑𝐴𝐴 = 0
Deformační podmínku vyjádříme pomocí Mohrova integrálu:
𝜑𝜑𝐴𝐴 =1
𝐸𝐸 ∙ 𝐽𝐽∙ � 𝑀𝑀(𝑑𝑑) ∙ 𝑚𝑚(𝜑𝜑)(𝑑𝑑) ∙ 𝑑𝑑𝑑𝑑 = 0
(ℓ)
Za jednotlivé členy dosadíme a dostáváme rovnici:
𝜑𝜑𝐴𝐴 =1
𝐸𝐸 ∙ 𝐽𝐽∙ � �𝑀𝑀𝐴𝐴 +
𝐹𝐹2
∙ 𝑑𝑑 ∙ cos 45°� ∙ ("1") ∙ (𝑑𝑑𝑑𝑑) = 0𝑚𝑚
0
,
Za předpokladu 𝐸𝐸 ∙ 𝐽𝐽 ≠ ∞ dostáváme již hledaný moment:
𝑀𝑀𝐴𝐴 = −√28
∙ 𝐹𝐹 ∙ 𝑎𝑎 .
Pro výpočet vnitřních účinků v bodě C použijeme tři statické rovnice:
1. do směru 𝐱𝐱 � 𝐹𝐹𝑚𝑚: 0 + 𝑇𝑇𝐶𝐶 = 0 ⟹ 𝑇𝑇𝐶𝐶 = 0 ,
2. do směru 𝐲𝐲 � 𝐹𝐹𝑦𝑦 : −𝐹𝐹2
+ 𝑁𝑁𝐶𝐶 = 0 ⟹ 𝑁𝑁𝐶𝐶 =𝐹𝐹2
,
3. momenty k 𝐂𝐂 � 𝑀𝑀𝐶𝐶: 𝑀𝑀𝐴𝐴 +𝐹𝐹2
∙𝑎𝑎 ∙ √2
2− 𝑀𝑀𝐶𝐶 = 0 ⟹ 𝑀𝑀𝐶𝐶 = +
√28
∙ 𝐹𝐹 ∙ 𝑎𝑎 .
Poznámka: Protože ve výsledku vychází MA < 0, znamená to, že původně zvolený směr (po směru hodinových ručiček) neodpovídal skutečnosti a skutečný moment MA bude mít opačný směr (proti směru hodinových ručiček). Ostatní veličiny vyšly kladné TA; TC; NA; NC a MC, což znamená, že jejich zvolené směry byly správné.
F
B
D
A
E⋅J C a
rovina řezu
nA
tA
A
𝑀𝑀𝐴𝐴 = −√28
∙ 𝐹𝐹 ∙ 𝑎𝑎
TA = 0
NA = F/2
a
TC = ?
NC = ?
MC = ?
E⋅J
MA = ? TA = 0
NA = F/2
ξ
"1"

Pružnost a pevnost II ZS 2018/2019
23
PŘÍKLAD 1.17 (TENKÝ RÁM SE DVĚMA OSAMI SYMETRIE – S „TUHOU PŘÍČKOU“):
Dáno: F ; a ; E⋅J = konst.
Určit: TA ; NA ; MA (vnitřní účinky v bodě A).
Řešení: Úloha má dvě osy symetrie → bude stačit řešit pouze ¼ ,
úloha by mohla být jen 1× staticky neurčitá, ale vzhledem k existenci „tuhé příčky“ (A−B) se neurčitost zvýší o 1 stupeň a úloha bude 2×staticky neurčitá.
Provedeme uvolnění ¼ rámu, nahradíme odebrané vazby a doplníme deformační podmínky.
𝜑𝜑𝐴𝐴 = 0 a 𝑢𝑢𝐴𝐴 = 0
Obě deformační podmínky vyjádříme pomocí Mohrových integrálů:
𝜑𝜑𝐴𝐴 =1
(𝐸𝐸 ∙ 𝐽𝐽)𝑝𝑝𝑜𝑜𝑢𝑢𝑒𝑒𝑢𝑢∙ � 𝑀𝑀(𝑑𝑑) ∙ 𝑚𝑚(𝜑𝜑)(𝑑𝑑) ∙ 𝑑𝑑𝑑𝑑 = 0
(ℓ)
,
𝑢𝑢𝐴𝐴 =1
(𝐸𝐸 ∙ 𝐽𝐽)𝑝𝑝𝑜𝑜𝑢𝑢𝑒𝑒𝑢𝑢∙ � 𝑀𝑀(𝑑𝑑) ∙ 𝑚𝑚(𝑢𝑢)(𝑑𝑑) ∙ 𝑑𝑑𝑑𝑑 = 0 .
(ℓ)
Za jednotlivé členy dosadíme a dostáváme rovnice:
𝜑𝜑𝐴𝐴 =1
(𝐸𝐸 ∙ 𝐽𝐽)𝑝𝑝𝑜𝑜𝑢𝑢𝑒𝑒𝑢𝑢∙ � �𝑀𝑀𝐴𝐴 − 𝑇𝑇𝐴𝐴 ∙ 𝑑𝑑 ∙ sin 45° +
𝐹𝐹2
∙ 𝑑𝑑 ∙ cos 45°� ∙ ("1") ∙ (𝑑𝑑𝑑𝑑) = 0𝑚𝑚
0
,
𝑢𝑢𝐴𝐴 =1
(𝐸𝐸 ∙ 𝐽𝐽)𝑝𝑝𝑜𝑜𝑢𝑢𝑒𝑒𝑢𝑢∙ � �𝑀𝑀𝐴𝐴 − 𝑇𝑇𝐴𝐴 ∙ 𝑑𝑑 ∙ sin 45° +
𝐹𝐹2
∙ 𝑑𝑑 ∙ cos 45°� ∙ ("1" ∙ 𝑑𝑑 ∙ sin 45°) ∙ (𝑑𝑑𝑑𝑑) = 0𝑚𝑚
0
.
Z nich po úpravách dostáváme „jednoduchou“ soustavu:
8 ∙ 𝑀𝑀𝐴𝐴 − 2 ∙ √2 ∙ 𝑇𝑇𝐴𝐴 ∙ 𝑎𝑎 = −√2 ∙ 𝐹𝐹 ∙ 𝑎𝑎 ,
6 ∙ 𝑀𝑀𝐴𝐴 − 2 ∙ √2 ∙ 𝑇𝑇𝐴𝐴 ∙ 𝑎𝑎 = −√2 ∙ 𝐹𝐹 ∙ 𝑎𝑎 , ze které již vyjádříme hledanou sílu TB a hledaný moment MB:
𝑇𝑇𝐴𝐴 =𝐹𝐹2
,
𝑀𝑀𝐴𝐴 = 0 .
Poznámka: S ohledem na výsledky je patrné, že výslednice NB a TB má právě směr prutu, a proto nevzniká žádný moment a prut je tedy namáhán pouze osovou tahovou silou O:
𝑂𝑂 = 𝑁𝑁𝐴𝐴 ∙ cos 45° + 𝑇𝑇𝐴𝐴 ∙ sin 45° =𝐹𝐹2
∙√22
+𝐹𝐹2
∙√22
= 𝐹𝐹 ∙√22
.
F
B
D
A
E⋅J C a
E⋅J
MA = ? TA = ?
NA = F/2
ξ
"1" "1"
24
F
B
D
A
(E⋅J)prutu C a
(E⋅A)příčky
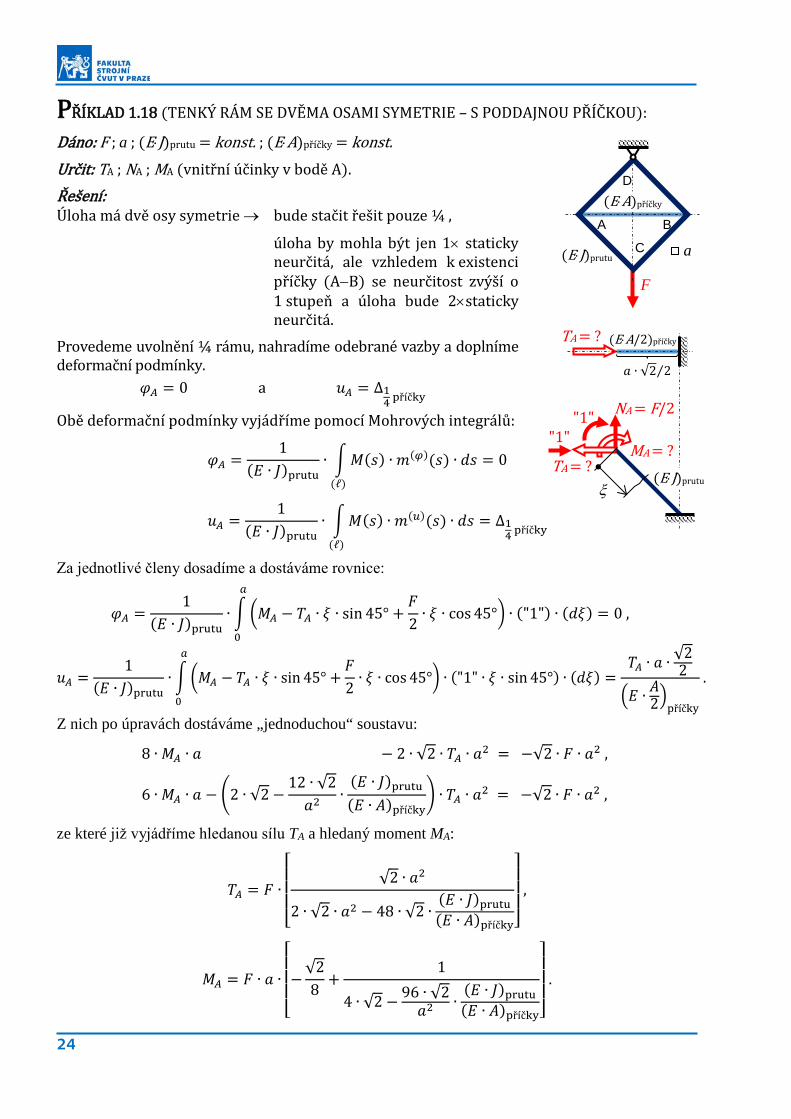
PŘÍKLAD 1.18 (TENKÝ RÁM SE DVĚMA OSAMI SYMETRIE – S PODDAJNOU PŘÍČKOU):
Dáno: F ; a ; (E⋅J)prutu = konst. ; (E⋅A)příčky = konst. Určit: TA ; NA ; MA (vnitřní účinky v bodě A).
Řešení: Úloha má dvě osy symetrie → bude stačit řešit pouze ¼ ,
úloha by mohla být jen 1× staticky neurčitá, ale vzhledem k existenci příčky (A−B) se neurčitost zvýší o 1 stupeň a úloha bude 2×staticky neurčitá.
Provedeme uvolnění ¼ rámu, nahradíme odebrané vazby a doplníme deformační podmínky.
𝜑𝜑𝐴𝐴 = 0 a 𝑢𝑢𝐴𝐴 = ∆14 příčky
Obě deformační podmínky vyjádříme pomocí Mohrových integrálů:
𝜑𝜑𝐴𝐴 =1
(𝐸𝐸 ∙ 𝐽𝐽)prutu∙ � 𝑀𝑀(𝑑𝑑) ∙ 𝑚𝑚(𝜑𝜑)(𝑑𝑑) ∙ 𝑑𝑑𝑑𝑑 = 0
(ℓ)
𝑢𝑢𝐴𝐴 =1
(𝐸𝐸 ∙ 𝐽𝐽)prutu∙ � 𝑀𝑀(𝑑𝑑) ∙ 𝑚𝑚(𝑢𝑢)(𝑑𝑑) ∙ 𝑑𝑑𝑑𝑑 = ∆1
4 příčky
(ℓ)
Za jednotlivé členy dosadíme a dostáváme rovnice:
𝜑𝜑𝐴𝐴 =1
(𝐸𝐸 ∙ 𝐽𝐽)prutu∙ � �𝑀𝑀𝐴𝐴 − 𝑇𝑇𝐴𝐴 ∙ 𝑑𝑑 ∙ sin 45° +
𝐹𝐹2
∙ 𝑑𝑑 ∙ cos 45°� ∙ ("1") ∙ (𝑑𝑑𝑑𝑑) = 0𝑚𝑚
0
,
𝑢𝑢𝐴𝐴 =1
(𝐸𝐸 ∙ 𝐽𝐽)prutu∙ � �𝑀𝑀𝐴𝐴 − 𝑇𝑇𝐴𝐴 ∙ 𝑑𝑑 ∙ sin 45° +
𝐹𝐹2
∙ 𝑑𝑑 ∙ cos 45°� ∙ ("1" ∙ 𝑑𝑑 ∙ sin 45°) ∙ (𝑑𝑑𝑑𝑑) =𝑇𝑇𝐴𝐴 ∙ 𝑎𝑎 ∙ √2
2�𝐸𝐸 ∙ 𝐴𝐴
2�příčky
𝑚𝑚
0
.
Z nich po úpravách dostáváme „jednoduchou“ soustavu:
8 ∙ 𝑀𝑀𝐴𝐴 ∙ 𝑎𝑎 − 2 ∙ √2 ∙ 𝑇𝑇𝐴𝐴 ∙ 𝑎𝑎2 = −√2 ∙ 𝐹𝐹 ∙ 𝑎𝑎2 ,
6 ∙ 𝑀𝑀𝐴𝐴 ∙ 𝑎𝑎 − �2 ∙ √2 −12 ∙ √2
𝑎𝑎2 ∙(𝐸𝐸 ∙ 𝐽𝐽)prutu
(𝐸𝐸 ∙ 𝐴𝐴)příčky� ∙ 𝑇𝑇𝐴𝐴 ∙ 𝑎𝑎2 = −√2 ∙ 𝐹𝐹 ∙ 𝑎𝑎2 ,
ze které již vyjádříme hledanou sílu TA a hledaný moment MA:
𝑇𝑇𝐴𝐴 = 𝐹𝐹 ∙
⎣⎢⎢⎢⎡
√2 ∙ 𝑎𝑎2
2 ∙ √2 ∙ 𝑎𝑎2 − 48 ∙ √2 ∙(𝐸𝐸 ∙ 𝐽𝐽)prutu(𝐸𝐸 ∙ 𝐴𝐴)příčky⎦
⎥⎥⎥⎤ ,
𝑀𝑀𝐴𝐴 = 𝐹𝐹 ∙ 𝑎𝑎 ∙
⎣⎢⎢⎢⎡−
√28
+1
4 ∙ √2 − 96 ∙ √2𝑎𝑎2 ∙
(𝐸𝐸 ∙ 𝐽𝐽)prutu(𝐸𝐸 ∙ 𝐴𝐴)příčky⎦
⎥⎥⎥⎤ .
TA = ? (E⋅A/2)příčky
(E⋅J)prutu
MA = ? TA = ?
NA = F/2
ξ
"1" "1"
𝑎𝑎 ∙ √2 2⁄
Pružnost a pevnost II ZS 2018/2019
25
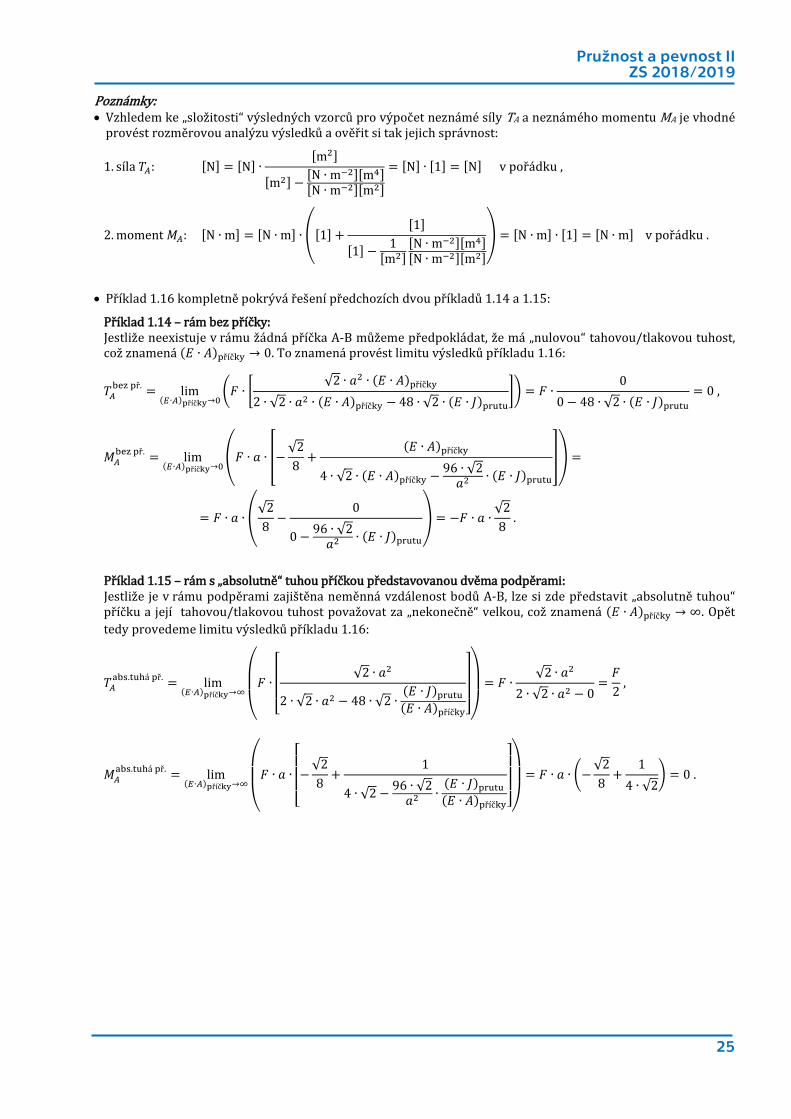
Poznámky: • Vzhledem ke „složitosti“ výsledných vzorců pro výpočet neznámé síly TA a neznámého momentu MA je vhodné
provést rozměrovou analýzu výsledků a ověřit si tak jejich správnost:
1. síla 𝑇𝑇𝐴𝐴: [N] = [N] ∙[m2]
[m2] − [N ∙ m−2][m4][N ∙ m−2][m2]
= [N] ∙ [1] = [N] v pořádku ,
2. moment 𝑀𝑀𝐴𝐴: [N ∙ m] = [N ∙ m] ∙ �[1] +[1]
[1] − 1[m2]
[N ∙ m−2][m4][N ∙ m−2][m2]
� = [N ∙ m] ∙ [1] = [N ∙ m] v pořádku .
• Příklad 1.16 kompletně pokrývá řešení předchozích dvou příkladů 1.14 a 1.15:
Příklad 1.14 – rám bez příčky: Jestliže neexistuje v rámu žádná příčka A-B můžeme předpokládat, že má „nulovou“ tahovou/tlakovou tuhost, což znamená (𝐸𝐸 ∙ 𝐴𝐴)příčky → 0. To znamená provést limitu výsledků příkladu 1.16:
𝑇𝑇𝐴𝐴bez př. = lim
(𝐸𝐸∙𝐴𝐴)příčky→0�𝐹𝐹 ∙ �
√2 ∙ 𝑎𝑎2 ∙ (𝐸𝐸 ∙ 𝐴𝐴)příčky
2 ∙ √2 ∙ 𝑎𝑎2 ∙ (𝐸𝐸 ∙ 𝐴𝐴)příčky − 48 ∙ √2 ∙ (𝐸𝐸 ∙ 𝐽𝐽)prutu�� = 𝐹𝐹 ∙
00 − 48 ∙ √2 ∙ (𝐸𝐸 ∙ 𝐽𝐽)prutu
= 0 ,
𝑀𝑀𝐴𝐴bez př. = lim
(𝐸𝐸∙𝐴𝐴)příčky→0�𝐹𝐹 ∙ 𝑎𝑎 ∙ �−
√28
+(𝐸𝐸 ∙ 𝐴𝐴)příčky
4 ∙ √2 ∙ (𝐸𝐸 ∙ 𝐴𝐴)příčky − 96 ∙ √2𝑎𝑎2 ∙ (𝐸𝐸 ∙ 𝐽𝐽)prutu
�� =
= 𝐹𝐹 ∙ 𝑎𝑎 ∙ �√28
−0
0 − 96 ∙ √2𝑎𝑎2 ∙ (𝐸𝐸 ∙ 𝐽𝐽)prutu
� = −𝐹𝐹 ∙ 𝑎𝑎 ∙√28
.
Příklad 1.15 – rám s „absolutně“ tuhou příčkou představovanou dvěma podpěrami: Jestliže je v rámu podpěrami zajištěna neměnná vzdálenost bodů A-B, lze si zde představit „absolutně tuhou“ příčku a její tahovou/tlakovou tuhost považovat za „nekonečně“ velkou, což znamená (𝐸𝐸 ∙ 𝐴𝐴)příčky → ∞. Opět tedy provedeme limitu výsledků příkladu 1.16:
𝑇𝑇𝐴𝐴abs.tuhá př. = lim
(𝐸𝐸∙𝐴𝐴)příčky→∞
⎝
⎜⎛
𝐹𝐹 ∙
⎣⎢⎢⎢⎡
√2 ∙ 𝑎𝑎2
2 ∙ √2 ∙ 𝑎𝑎2 − 48 ∙ √2 ∙(𝐸𝐸 ∙ 𝐽𝐽)prutu(𝐸𝐸 ∙ 𝐴𝐴)příčky⎦
⎥⎥⎥⎤
⎠
⎟⎞
= 𝐹𝐹 ∙√2 ∙ 𝑎𝑎2
2 ∙ √2 ∙ 𝑎𝑎2 − 0=
𝐹𝐹2
,
𝑀𝑀𝐴𝐴abs.tuhá př. = lim
(𝐸𝐸∙𝐴𝐴)příčky→∞
⎝
⎜⎛
𝐹𝐹 ∙ 𝑎𝑎 ∙
⎣⎢⎢⎢⎡−
√28
+1
4 ∙ √2 − 96 ∙ √2𝑎𝑎2 ∙
(𝐸𝐸 ∙ 𝐽𝐽)prutu(𝐸𝐸 ∙ 𝐴𝐴)příčky⎦
⎥⎥⎥⎤
⎠
⎟⎞
= 𝐹𝐹 ∙ 𝑎𝑎 ∙ �−√28
+1
4 ∙ √2� = 0 .
26
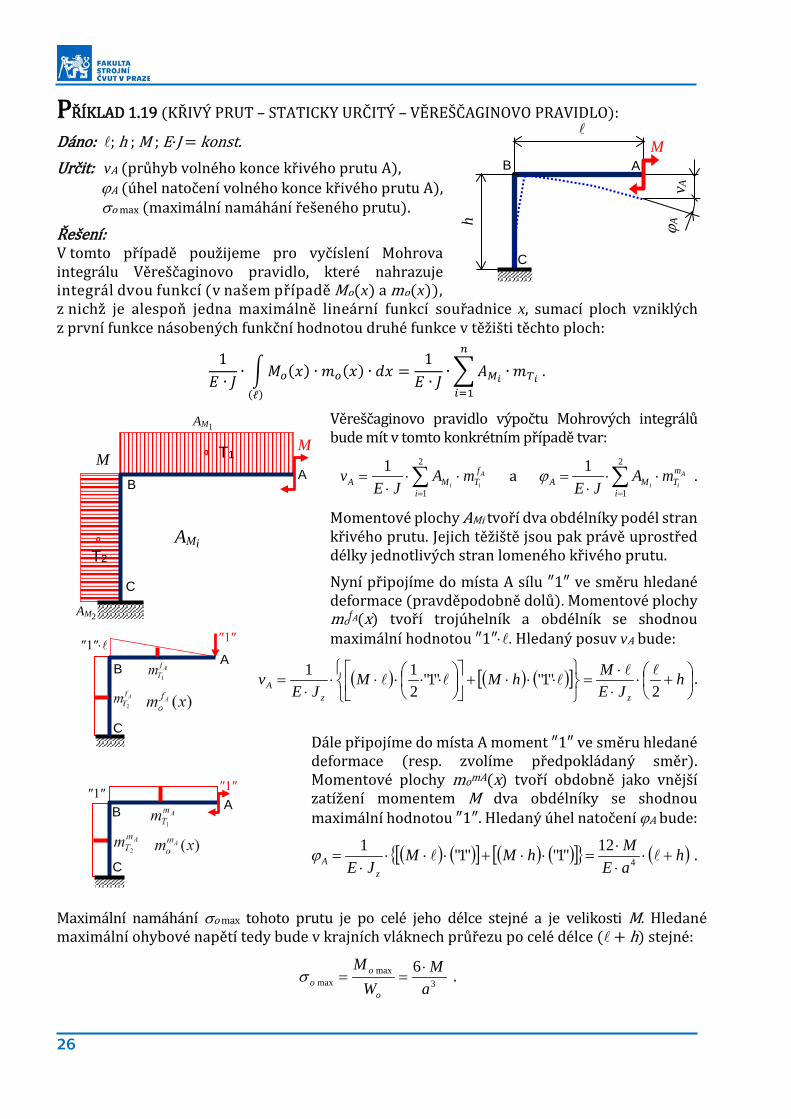
PŘÍKLAD 1.19 (KŘIVÝ PRUT – STATICKY URČITÝ – VĚREŠČAGINOVO PRAVIDLO):
Dáno: ; h ; M ; E·J = konst. Určit: vA (průhyb volného konce křivého prutu A),
ϕA (úhel natočení volného konce křivého prutu A), σo max (maximální namáhání řešeného prutu).
Řešení: V tomto případě použijeme pro vyčíslení Mohrova integrálu Věreščaginovo pravidlo, které nahrazuje integrál dvou funkcí (v našem případě Mo(x) a mo(x)), z nichž je alespoň jedna maximálně lineární funkcí souřadnice x, sumací ploch vzniklých z první funkce násobených funkční hodnotou druhé funkce v těžišti těchto ploch:
1𝐸𝐸 ∙ 𝐽𝐽
∙ � 𝑀𝑀𝑑𝑑(𝑚𝑚) ∙ 𝑚𝑚𝑑𝑑(𝑚𝑚) ∙ 𝑑𝑑𝑚𝑚
(ℓ)
=1
𝐸𝐸 ∙ 𝐽𝐽∙ � 𝐴𝐴𝑀𝑀𝑖𝑖 ∙ 𝑚𝑚𝑇𝑇𝑖𝑖
𝑑𝑑
𝑖𝑖=1
.
Věreščaginovo pravidlo výpočtu Mohrových integrálů bude mít v tomto konkrétním případě tvar:
∑=
⋅⋅⋅
=2
1
1i
fTMA
A
iimA
JEv a ∑
=
⋅⋅⋅
=2
1
1i
mTMA
A
iimA
JEϕ .
Momentové plochy AMi tvoří dva obdélníky podél stran křivého prutu. Jejich těžiště jsou pak právě uprostřed délky jednotlivých stran lomeného křivého prutu.
Nyní připojíme do místa A sílu ″1″ ve směru hledané deformace (pravděpodobně dolů). Momentové plochy mofA(x) tvoří trojúhelník a obdélník se shodnou maximální hodnotou ″1″⋅. Hledaný posuv vA bude:
( ) ( ) ( )[ ]
+⋅
⋅⋅
=
⋅⋅⋅+
⋅⋅⋅⋅⋅
⋅= h
JEMhMM
JEv
zzA 2
"1""1"211
.
Dále připojíme do místa A moment ″1″ ve směru hledané deformace (resp. zvolíme předpokládaný směr). Momentové plochy momA(x) tvoří obdobně jako vnější zatížení momentem M dva obdélníky se shodnou maximální hodnotou ″1″. Hledaný úhel natočení ϕA bude:
( ) ( )[ ] ( ) ( )[ ]{ } ( )haEMhMM
JE zA +⋅
⋅⋅
=⋅⋅+⋅⋅⋅⋅
= 412"1""1"1ϕ .
Maximální namáhání σo max tohoto prutu je po celé jeho délce stejné a je velikosti M. Hledané maximální ohybové napětí tedy bude v krajních vláknech průřezu po celé délce ( + h) stejné:
3max
max6
aM
WM
o
oo
⋅==σ .
A B
C
M M T1
T2
AM1
AM2
AMi
A B
C
″1″
″1″⋅
A B
C
″1″
″1″
A B
C
h
v A
ϕ A
M
Pružnost a pevnost II ZS 2018/2019
27
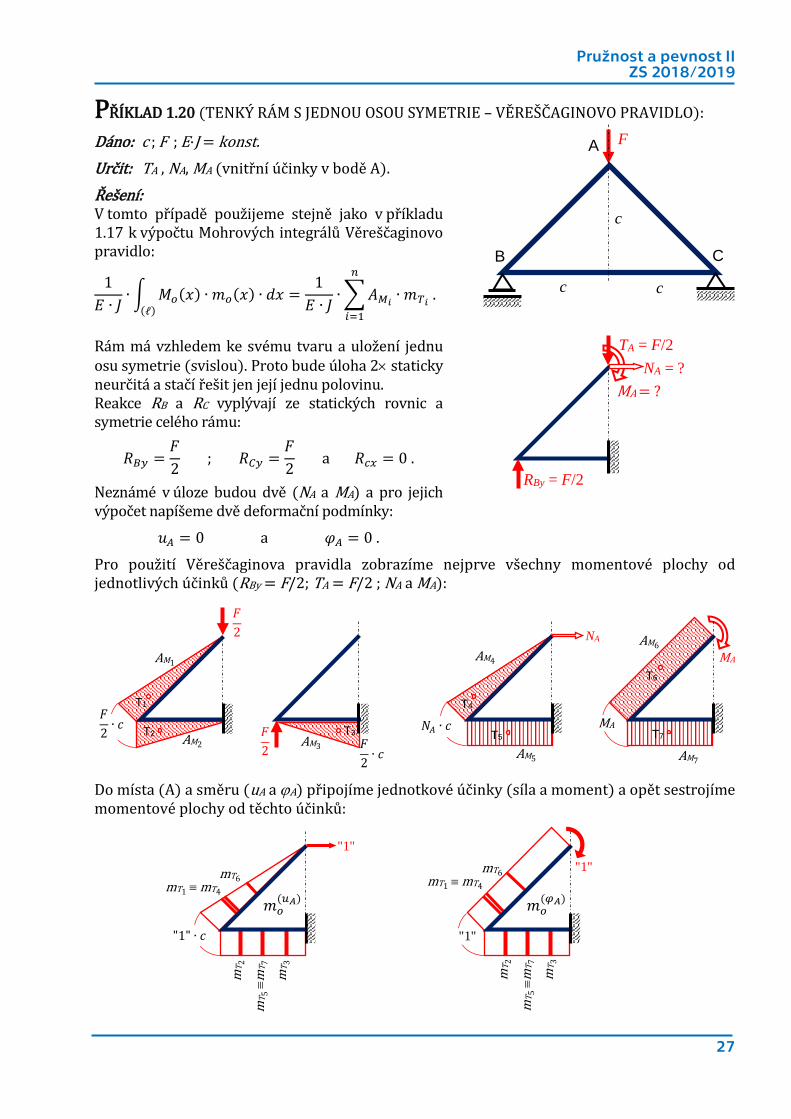
PŘÍKLAD 1.20 (TENKÝ RÁM S JEDNOU OSOU SYMETRIE – VĚREŠČAGINOVO PRAVIDLO):
Dáno: c ; F ; E·J = konst. Určit: TA , NA, MA (vnitřní účinky v bodě A).
Řešení: V tomto případě použijeme stejně jako v příkladu 1.17 k výpočtu Mohrových integrálů Věreščaginovo pravidlo:
1𝐸𝐸 ∙ 𝐽𝐽
∙ � 𝑀𝑀𝑑𝑑(𝑚𝑚) ∙ 𝑚𝑚𝑑𝑑(𝑚𝑚) ∙ 𝑑𝑑𝑚𝑚 =1
𝐸𝐸 ∙ 𝐽𝐽∙ � 𝐴𝐴𝑀𝑀𝑖𝑖 ∙ 𝑚𝑚𝑇𝑇𝑖𝑖
𝑑𝑑
𝑖𝑖=1
(ℓ) .
Rám má vzhledem ke svému tvaru a uložení jednu osu symetrie (svislou). Proto bude úloha 2× staticky neurčitá a stačí řešit jen její jednu polovinu. Reakce RB a RC vyplývají ze statických rovnic a symetrie celého rámu:
𝑅𝑅𝐵𝐵𝑦𝑦 =𝐹𝐹2
; 𝑅𝑅𝐶𝐶𝑦𝑦 =𝐹𝐹2
a 𝑅𝑅𝑐𝑐𝑚𝑚 = 0 .
Neznámé v úloze budou dvě (NA a MA) a pro jejich výpočet napíšeme dvě deformační podmínky:
𝑢𝑢𝐴𝐴 = 0 a 𝜑𝜑𝐴𝐴 = 0 . Pro použití Věreščaginova pravidla zobrazíme nejprve všechny momentové plochy od jednotlivých účinků (RBy = F/2; TA = F/2 ; NA a MA): Do místa (A) a směru (uA a ϕA) připojíme jednotkové účinky (síla a moment) a opět sestrojíme momentové plochy od těchto účinků:
𝑚𝑚𝑑𝑑(𝑢𝑢𝐴𝐴) 𝑚𝑚𝑑𝑑
(𝜑𝜑𝐴𝐴)
c c
c
F A
B C
TA = F/2 NA = ?
MA = ?
RBy = F/2
𝐹𝐹2
𝐹𝐹2
∙ 𝑐𝑐
AM1
AM2
T1
T2 𝐹𝐹2
AM3
T3
AM4
AM5
T4
T5
NA
𝑁𝑁𝐴𝐴 ∙ 𝑐𝑐
AM7
AM6
T6
T7
MA
MA 𝐹𝐹2
∙ 𝑐𝑐
mT1 ≡ mT4
mT 2
m
T 5 ≡
mT 7
mT 3
"1"
"1" ∙ 𝑐𝑐
mT6 "1"
"1"
mT1 ≡ mT4
mT 2
mT 5
≡m
T 7
mT 3
mT6
28
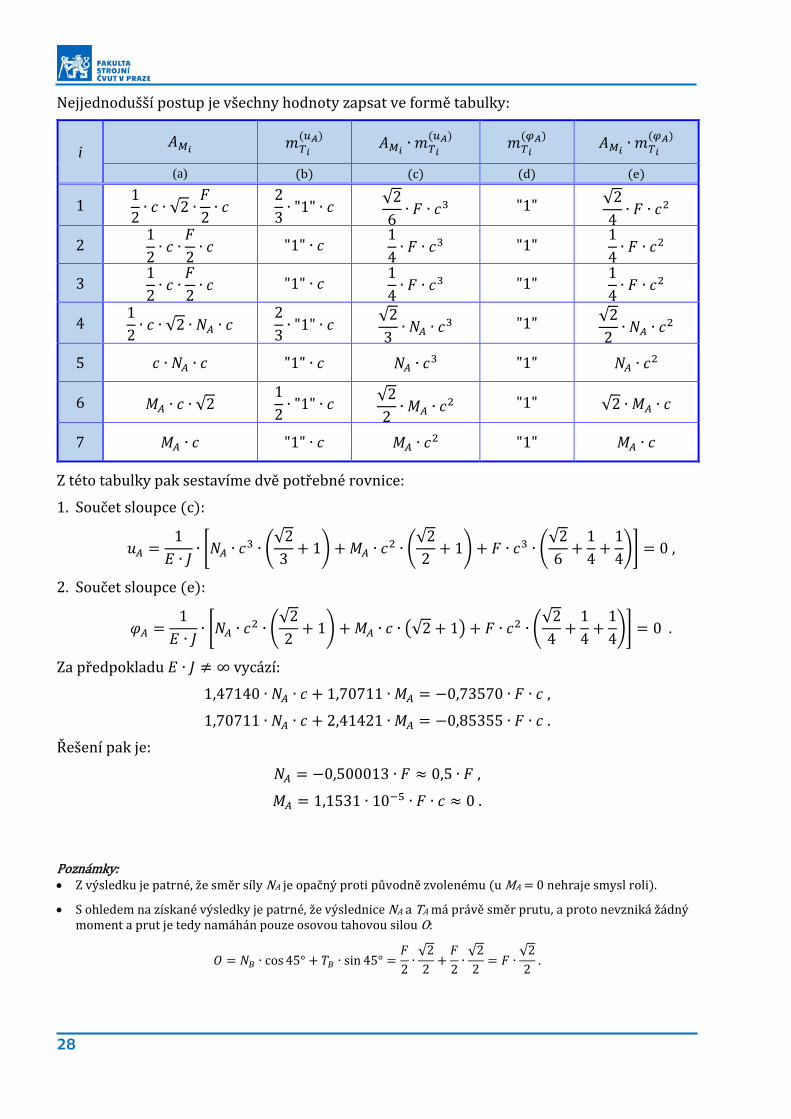
Nejjednodušší postup je všechny hodnoty zapsat ve formě tabulky:
i 𝐴𝐴𝑀𝑀𝑖𝑖 𝑚𝑚𝑇𝑇𝑖𝑖
(𝑢𝑢𝐴𝐴) 𝐴𝐴𝑀𝑀𝑖𝑖 ∙ 𝑚𝑚𝑇𝑇𝑖𝑖
(𝑢𝑢𝐴𝐴) 𝑚𝑚𝑇𝑇𝑖𝑖
(𝜑𝜑𝐴𝐴) 𝐴𝐴𝑀𝑀𝑖𝑖 ∙ 𝑚𝑚𝑇𝑇𝑖𝑖
(𝜑𝜑𝐴𝐴)
(a) (b) (c) (d) (e)
1 12
∙ 𝑐𝑐 ∙ √2 ∙𝐹𝐹2
∙ 𝑐𝑐 23
∙ "1" ∙ 𝑐𝑐 √26
∙ 𝐹𝐹 ∙ 𝑐𝑐3 "1" √24
∙ 𝐹𝐹 ∙ 𝑐𝑐2
2 12
∙ 𝑐𝑐 ∙𝐹𝐹2
∙ 𝑐𝑐 "1" ∙ 𝑐𝑐 14
∙ 𝐹𝐹 ∙ 𝑐𝑐3 "1" 14
∙ 𝐹𝐹 ∙ 𝑐𝑐2
3 12
∙ 𝑐𝑐 ∙𝐹𝐹2
∙ 𝑐𝑐 "1" ∙ 𝑐𝑐 14
∙ 𝐹𝐹 ∙ 𝑐𝑐3 "1" 14
∙ 𝐹𝐹 ∙ 𝑐𝑐2
4 12
∙ 𝑐𝑐 ∙ √2 ∙ 𝑁𝑁𝐴𝐴 ∙ 𝑐𝑐 23
∙ "1" ∙ 𝑐𝑐 √23
∙ 𝑁𝑁𝐴𝐴 ∙ 𝑐𝑐3 "1" √22
∙ 𝑁𝑁𝐴𝐴 ∙ 𝑐𝑐2
5 𝑐𝑐 ∙ 𝑁𝑁𝐴𝐴 ∙ 𝑐𝑐 "1" ∙ 𝑐𝑐 𝑁𝑁𝐴𝐴 ∙ 𝑐𝑐3 "1" 𝑁𝑁𝐴𝐴 ∙ 𝑐𝑐2
6 𝑀𝑀𝐴𝐴 ∙ 𝑐𝑐 ∙ √2 12
∙ "1" ∙ 𝑐𝑐 √22
∙ 𝑀𝑀𝐴𝐴 ∙ 𝑐𝑐2 "1" √2 ∙ 𝑀𝑀𝐴𝐴 ∙ 𝑐𝑐
7 𝑀𝑀𝐴𝐴 ∙ 𝑐𝑐 "1" ∙ 𝑐𝑐 𝑀𝑀𝐴𝐴 ∙ 𝑐𝑐2 "1" 𝑀𝑀𝐴𝐴 ∙ 𝑐𝑐
Z této tabulky pak sestavíme dvě potřebné rovnice:
1. Součet sloupce (c):
𝑢𝑢𝐴𝐴 =1
𝐸𝐸 ∙ 𝐽𝐽∙ �𝑁𝑁𝐴𝐴 ∙ 𝑐𝑐3 ∙ �
√23
+ 1� + 𝑀𝑀𝐴𝐴 ∙ 𝑐𝑐2 ∙ �√22
+ 1� + 𝐹𝐹 ∙ 𝑐𝑐3 ∙ �√26
+14
+14
�� = 0 ,
2. Součet sloupce (e):
𝜑𝜑𝐴𝐴 =1
𝐸𝐸 ∙ 𝐽𝐽∙ �𝑁𝑁𝐴𝐴 ∙ 𝑐𝑐2 ∙ �
√22
+ 1� + 𝑀𝑀𝐴𝐴 ∙ 𝑐𝑐 ∙ �√2 + 1� + 𝐹𝐹 ∙ 𝑐𝑐2 ∙ �√24
+14
+14
�� = 0 .
Za předpokladu 𝐸𝐸 ∙ 𝐽𝐽 ≠ ∞ vycází:
1,47140 ∙ 𝑁𝑁𝐴𝐴 ∙ 𝑐𝑐 + 1,70711 ∙ 𝑀𝑀𝐴𝐴 = −0,73570 ∙ 𝐹𝐹 ∙ 𝑐𝑐 ,
1,70711 ∙ 𝑁𝑁𝐴𝐴 ∙ 𝑐𝑐 + 2,41421 ∙ 𝑀𝑀𝐴𝐴 = −0,85355 ∙ 𝐹𝐹 ∙ 𝑐𝑐 .
Řešení pak je:
𝑁𝑁𝐴𝐴 = −0,500013 ∙ 𝐹𝐹 ≈ 0,5 ∙ 𝐹𝐹 ,
𝑀𝑀𝐴𝐴 = 1,1531 ∙ 10−5 ∙ 𝐹𝐹 ∙ 𝑐𝑐 ≈ 0 .
Poznámky: • Z výsledku je patrné, že směr síly NA je opačný proti původně zvolenému (u MA = 0 nehraje smysl roli).
• S ohledem na získané výsledky je patrné, že výslednice NA a TA má právě směr prutu, a proto nevzniká žádný moment a prut je tedy namáhán pouze osovou tahovou silou O:
𝑂𝑂 = 𝑁𝑁𝐵𝐵 ∙ cos 45° + 𝑇𝑇𝐵𝐵 ∙ sin 45° =𝐹𝐹2
∙√22
+𝐹𝐹2
∙√22
= 𝐹𝐹 ∙√22
.
Pružnost a pevnost II ZS 2018/2019
29
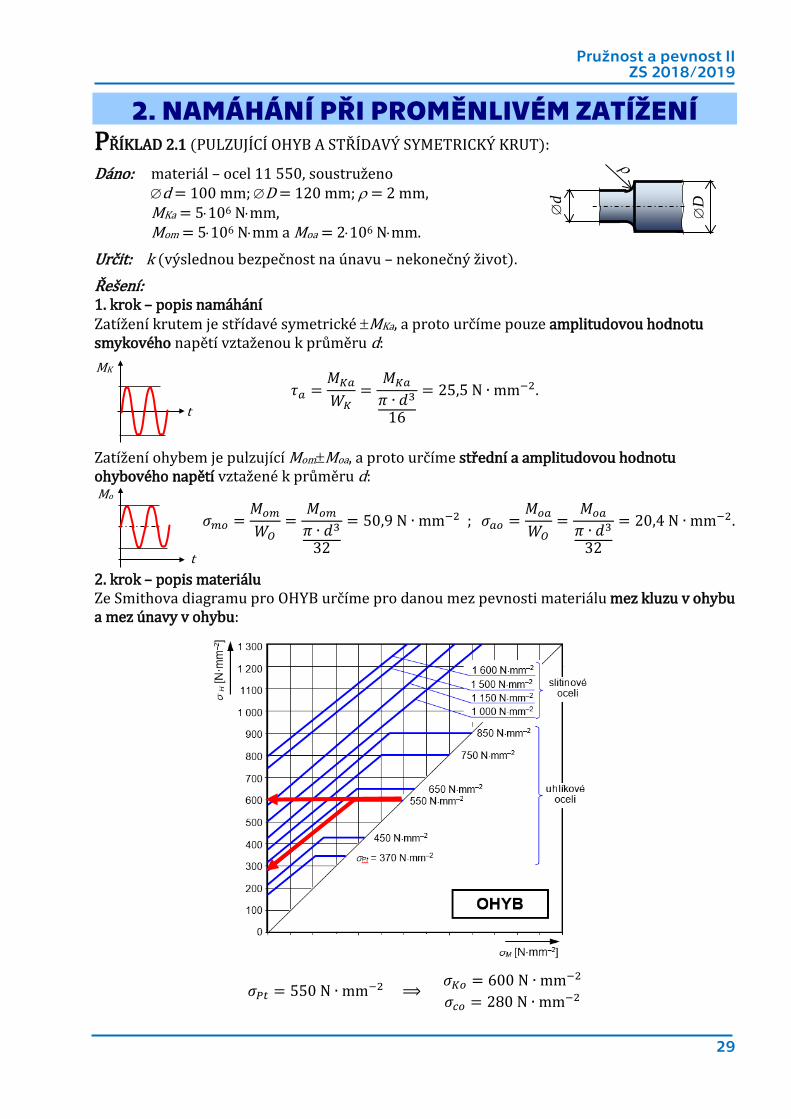
2. NAMÁHÁNÍ PŘI PROMĚNLIVÉM ZATÍŽENÍ PŘÍKLAD 2.1 (PULZUJÍCÍ OHYB A STŘÍDAVÝ SYMETRICKÝ KRUT):
Dáno: materiál – ocel 11 550, soustruženo ∅d = 100 mm; ∅D = 120 mm; ρ = 2 mm, MKa = 5⋅106 N⋅mm, Mom = 5⋅106 N⋅mm a Moa = 2⋅106 N⋅mm. Určit: k (výslednou bezpečnost na únavu – nekonečný život).
Řešení: 1. krok – popis namáhání Zatížení krutem je střídavé symetrické ±MKa, a proto určíme pouze amplitudovou hodnotu smykového napětí vztaženou k průměru d:
𝜏𝜏𝑚𝑚 =𝑀𝑀𝐾𝐾𝑚𝑚
𝑊𝑊𝐾𝐾=
𝑀𝑀𝐾𝐾𝑚𝑚𝜋𝜋 ∙ 𝑑𝑑3
16
= 25,5 N ∙ mm−2.
Zatížení ohybem je pulzující Mom±Moa, a proto určíme střední a amplitudovou hodnotu ohybového napětí vztažené k průměru d:
𝜎𝜎𝑚𝑚𝑑𝑑 =𝑀𝑀𝑑𝑑𝑚𝑚
𝑊𝑊𝑂𝑂=
𝑀𝑀𝑑𝑑𝑚𝑚𝜋𝜋 ∙ 𝑑𝑑3
32
= 50,9 N ∙ mm−2 ; 𝜎𝜎𝑚𝑚𝑑𝑑 =𝑀𝑀𝑑𝑑𝑚𝑚
𝑊𝑊𝑂𝑂=
𝑀𝑀𝑑𝑑𝑚𝑚𝜋𝜋 ∙ 𝑑𝑑3
32
= 20,4 N ∙ mm−2.
2. krok – popis materiálu Ze Smithova diagramu pro OHYB určíme pro danou mez pevnosti materiálu mez kluzu v ohybu a mez únavy v ohybu:
𝜎𝜎𝑃𝑃𝑒𝑒 = 550 N ∙ mm−2 ⟹ 𝜎𝜎𝐾𝐾𝑑𝑑 = 600 N ∙ mm−2
𝜎𝜎𝑐𝑐𝑑𝑑 = 280 N ∙ mm−2
t
MK
t
Mo
∅d
∅D
30
Pomocí meze únavy v ohybu určíme mez únavy ve smyku a fiktivní napětí v ohybu:
𝜎𝜎𝑐𝑐𝑑𝑑 = 280 N ∙ mm−2 ⟹
𝜏𝜏𝑐𝑐 ≈ 0,6 ∙ 𝜎𝜎𝑐𝑐𝑑𝑑 = 168 N ∙ mm−2
𝜎𝜎𝐹𝐹𝑑𝑑 =𝜎𝜎𝑐𝑐𝑑𝑑
𝑑𝑑=
2800,15
= 1867 N ∙ mm−2
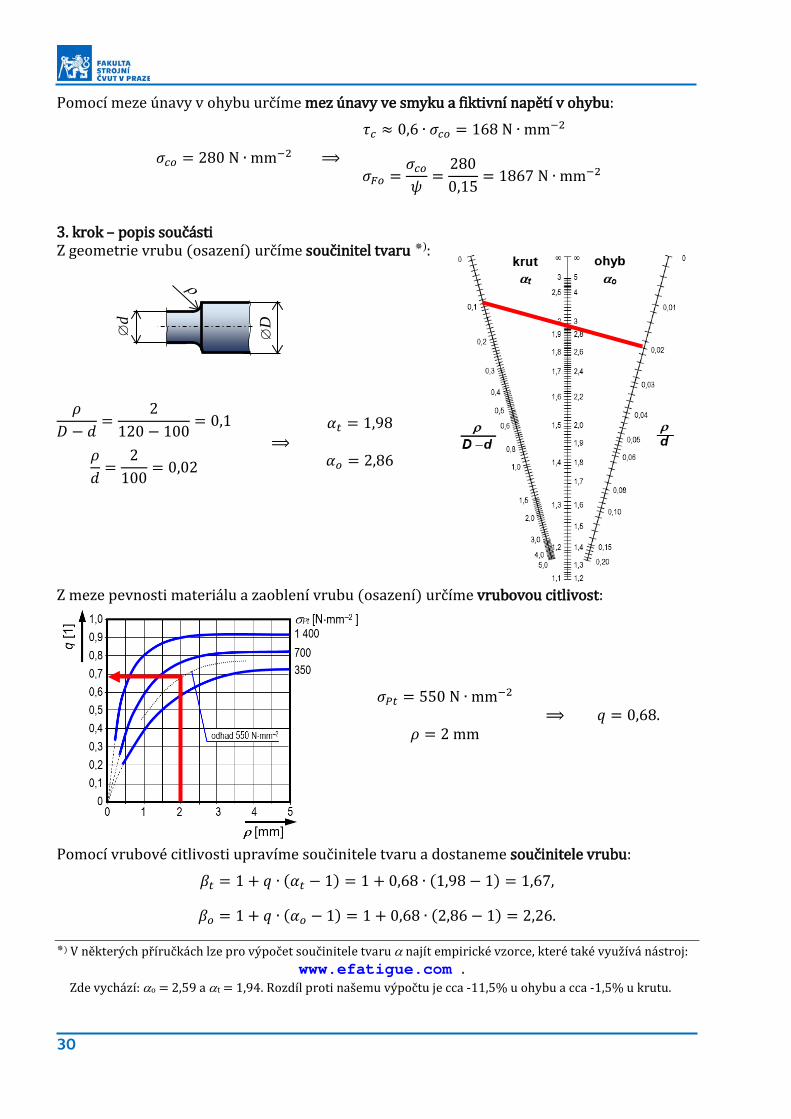
3. krok – popis součásti Z geometrie vrubu (osazení) určíme součinitel tvaru ):
𝜌𝜌
𝐷𝐷 − 𝑑𝑑=
2120 − 100
= 0,1
𝜌𝜌𝑑𝑑
=2
100= 0,02
⟹ 𝛼𝛼𝑒𝑒 = 1,98
𝛼𝛼𝑑𝑑 = 2,86
Z meze pevnosti materiálu a zaoblení vrubu (osazení) určíme vrubovou citlivost:
𝜎𝜎𝑃𝑃𝑒𝑒 = 550 N ∙ mm−2
𝜌𝜌 = 2 mm
⟹ 𝑞𝑞 = 0,68.
Pomocí vrubové citlivosti upravíme součinitele tvaru a dostaneme součinitele vrubu:
𝛽𝛽𝑒𝑒 = 1 + 𝑞𝑞 ∙ (𝛼𝛼𝑒𝑒 − 1) = 1 + 0,68 ∙ (1,98 − 1) = 1,67,
𝛽𝛽𝑑𝑑 = 1 + 𝑞𝑞 ∙ (𝛼𝛼𝑑𝑑 − 1) = 1 + 0,68 ∙ (2,86 − 1) = 2,26.
) V některých příručkách lze pro výpočet součinitele tvaru α najít empirické vzorce, které také využívá nástroj: www.efatigue.com .
Zde vychází: αo = 2,59 a αt = 1,94. Rozdíl proti našemu výpočtu je cca -11,5% u ohybu a cca -1,5% u krutu.
∅d
∅D
Pružnost a pevnost II ZS 2018/2019
31
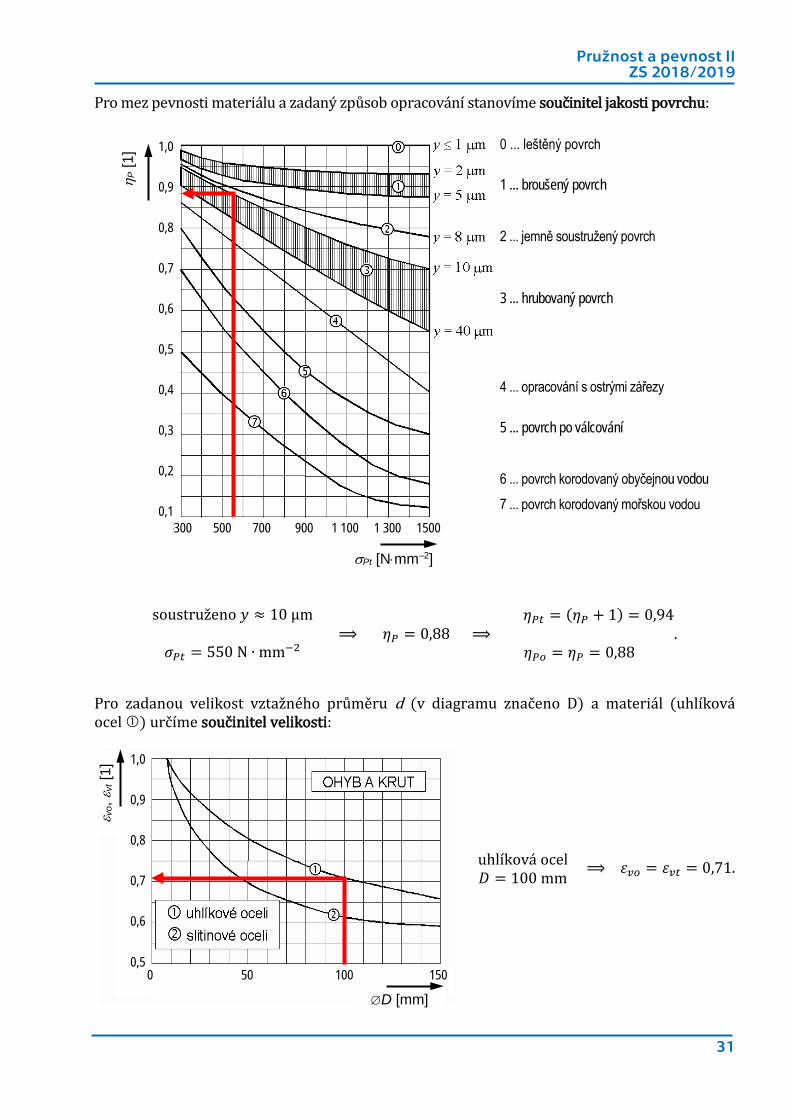
Pro mez pevnosti materiálu a zadaný způsob opracování stanovíme součinitel jakosti povrchu:
soustruženo 𝑦𝑦 ≈ 10 μm
𝜎𝜎𝑃𝑃𝑒𝑒 = 550 N ∙ mm−2 ⟹ 𝑑𝑑𝑃𝑃 = 0,88 ⟹
𝑑𝑑𝑃𝑃𝑒𝑒 = (𝑑𝑑𝑃𝑃 + 1) = 0,94
𝑑𝑑𝑃𝑃𝑑𝑑 = 𝑑𝑑𝑃𝑃 = 0,88 .
Pro zadanou velikost vztažného průměru d (v diagramu značeno D) a materiál (uhlíková ocel ) určíme součinitel velikosti:
uhlíková ocel𝐷𝐷 = 100 mm ⟹ 𝜀𝜀𝑣𝑣𝑑𝑑 = 𝜀𝜀𝑣𝑣𝑒𝑒 = 0,71.
1,0
0,9
0,8
0,7
0,6
0,5
ε vo,
ε vt [
1]
0 50 100 150
∅D [mm]
0 ... leštěný povrch
1 ... broušený povrch
2 ... jemně soustružený povrch
3 ... hrubovaný povrch
4 ... opracování s ostrými zářezy
5 ... povrch po válcování
6 ... povrch korodovaný obyčejnou vodou 7 ... povrch korodovaný mořskou vodou
1,0
0,9
0,8
0,7
0,6
0,5
0,4
0,3
0,2
0,1
η P [1
]
300 500 700 900 1 100 1 300 1500
σPt [N⋅mm–2]
32
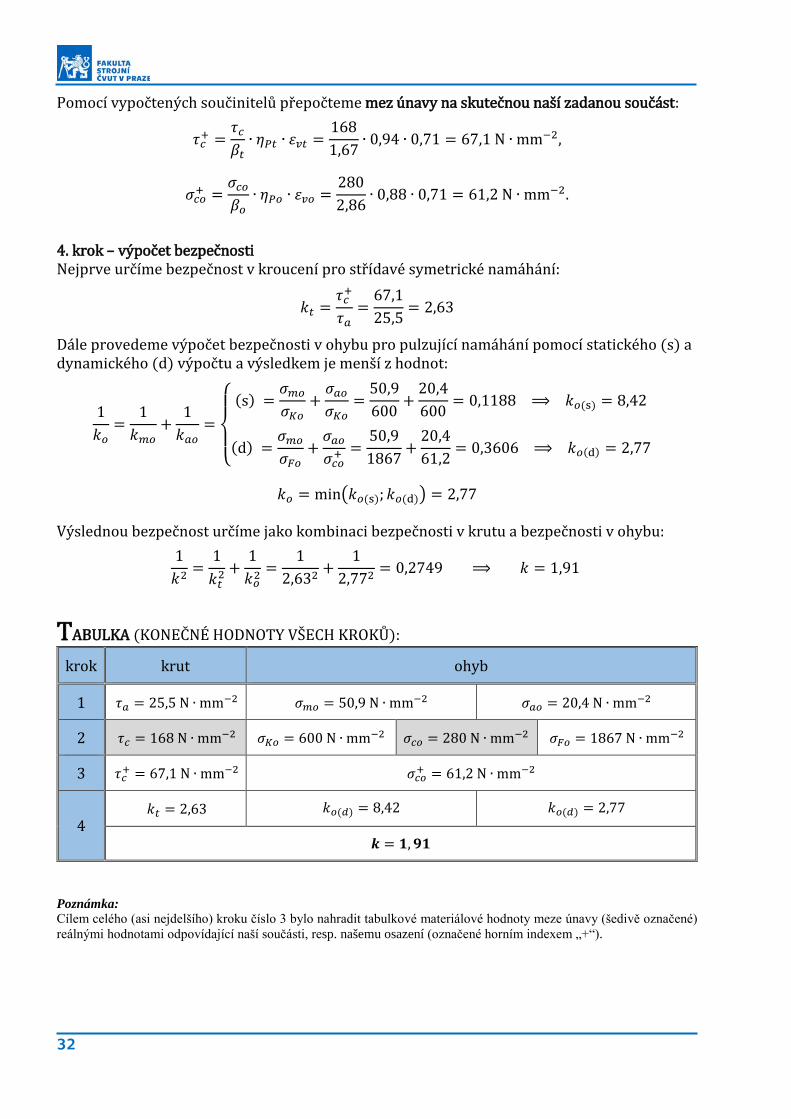
Pomocí vypočtených součinitelů přepočteme mez únavy na skutečnou naší zadanou součást:
𝜏𝜏𝑐𝑐+ =
𝜏𝜏𝑐𝑐
𝛽𝛽𝑒𝑒∙ 𝑑𝑑𝑃𝑃𝑒𝑒 ∙ 𝜀𝜀𝑣𝑣𝑒𝑒 =
1681,67
∙ 0,94 ∙ 0,71 = 67,1 N ∙ mm−2,
𝜎𝜎𝑐𝑐𝑑𝑑+ =
𝜎𝜎𝑐𝑐𝑑𝑑
𝛽𝛽𝑑𝑑∙ 𝑑𝑑𝑃𝑃𝑑𝑑 ∙ 𝜀𝜀𝑣𝑣𝑑𝑑 =
2802,86
∙ 0,88 ∙ 0,71 = 61,2 N ∙ mm−2.
4. krok – výpočet bezpečnosti Nejprve určíme bezpečnost v kroucení pro střídavé symetrické namáhání:
𝑘𝑘𝑒𝑒 =𝜏𝜏𝑐𝑐
+
𝜏𝜏𝑚𝑚=
67,125,5
= 2,63
Dále provedeme výpočet bezpečnosti v ohybu pro pulzující namáhání pomocí statického (s) a dynamického (d) výpočtu a výsledkem je menší z hodnot:
1𝑘𝑘𝑑𝑑
=1
𝑘𝑘𝑚𝑚𝑑𝑑+
1𝑘𝑘𝑚𝑚𝑑𝑑
=
⎩⎪⎨
⎪⎧ (s) =
𝜎𝜎𝑚𝑚𝑑𝑑
𝜎𝜎𝐾𝐾𝑑𝑑+
𝜎𝜎𝑚𝑚𝑑𝑑
𝜎𝜎𝐾𝐾𝑑𝑑=
50,9600
+20,4600
= 0,1188 ⟹ 𝑘𝑘𝑑𝑑(s) = 8,42
(d) =𝜎𝜎𝑚𝑚𝑑𝑑
𝜎𝜎𝐹𝐹𝑑𝑑+
𝜎𝜎𝑚𝑚𝑑𝑑
𝜎𝜎𝑐𝑐𝑑𝑑+ =
50,91867
+20,461,2
= 0,3606 ⟹ 𝑘𝑘𝑑𝑑(d) = 2,77
𝑘𝑘𝑑𝑑 = min�𝑘𝑘𝑑𝑑(s); 𝑘𝑘𝑑𝑑(d)� = 2,77
Výslednou bezpečnost určíme jako kombinaci bezpečnosti v krutu a bezpečnosti v ohybu: 1
𝑘𝑘2 =1
𝑘𝑘𝑒𝑒2 +
1𝑘𝑘𝑑𝑑
2 =1
2,632 +1
2,772 = 0,2749 ⟹ 𝑘𝑘 = 1,91
TABULKA (KONEČNÉ HODNOTY VŠECH KROKŮ):
krok krut ohyb
1 𝜏𝜏𝑚𝑚 = 25,5 N ∙ mm−2 𝜎𝜎𝑚𝑚𝑑𝑑 = 50,9 N ∙ mm−2 𝜎𝜎𝑚𝑚𝑑𝑑 = 20,4 N ∙ mm−2
2 𝜏𝜏𝑐𝑐 = 168 N ∙ mm−2 𝜎𝜎𝐾𝐾𝑑𝑑 = 600 N ∙ mm−2 𝜎𝜎𝑐𝑐𝑑𝑑 = 280 N ∙ mm−2 𝜎𝜎𝐹𝐹𝑑𝑑 = 1867 N ∙ mm−2
3 𝜏𝜏𝑐𝑐+ = 67,1 N ∙ mm−2 𝜎𝜎𝑐𝑐𝑑𝑑
+ = 61,2 N ∙ mm−2
4 𝑘𝑘𝑒𝑒 = 2,63 𝑘𝑘𝑑𝑑(𝑑𝑑) = 8,42 𝑘𝑘𝑑𝑑(𝑑𝑑) = 2,77
𝒌𝒌 = 𝟏𝟏, 𝟗𝟗𝟏𝟏
Poznámka: Cílem celého (asi nejdelšího) kroku číslo 3 bylo nahradit tabulkové materiálové hodnoty meze únavy (šedivě označené) reálnými hodnotami odpovídající naší součásti, resp. našemu osazení (označené horním indexem „+“).
Pružnost a pevnost II ZS 2018/2019
33
∅d
∅D
ρ
MK MK
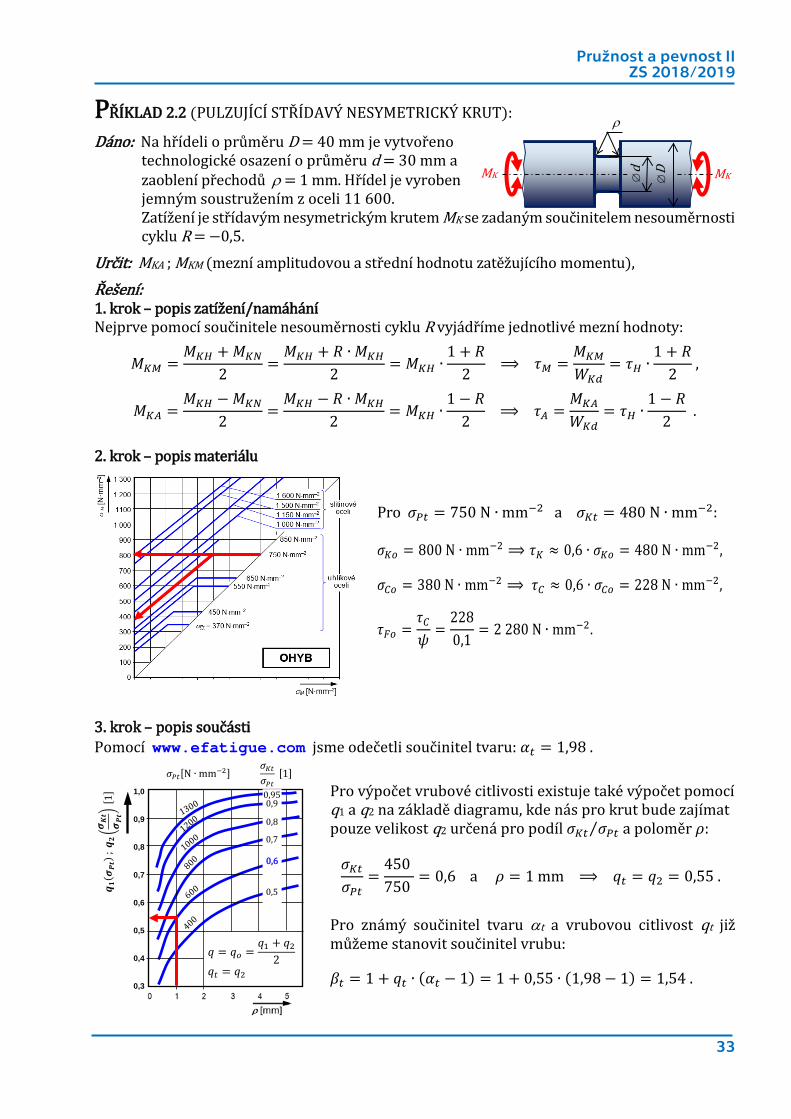
PŘÍKLAD 2.2 (PULZUJÍCÍ STŘÍDAVÝ NESYMETRICKÝ KRUT):
Dáno: Na hřídeli o průměru D = 40 mm je vytvořeno technologické osazení o průměru d = 30 mm a zaoblení přechodů ρ = 1 mm. Hřídel je vyroben jemným soustružením z oceli 11 600. Zatížení je střídavým nesymetrickým krutem MK se zadaným součinitelem nesouměrnosti cyklu R = −0,5.
Určit: MKA ; MKM (mezní amplitudovou a střední hodnotu zatěžujícího momentu),
Řešení: 1. krok – popis zatížení/namáhání Nejprve pomocí součinitele nesouměrnosti cyklu R vyjádříme jednotlivé mezní hodnoty:
𝑀𝑀𝐾𝐾𝑀𝑀 =𝑀𝑀𝐾𝐾𝐾𝐾 + 𝑀𝑀𝐾𝐾𝐾𝐾
2=
𝑀𝑀𝐾𝐾𝐾𝐾 + 𝑅𝑅 ∙ 𝑀𝑀𝐾𝐾𝐾𝐾
2= 𝑀𝑀𝐾𝐾𝐾𝐾 ∙
1 + 𝑅𝑅2
⟹ 𝜏𝜏𝑀𝑀 =𝑀𝑀𝐾𝐾𝑀𝑀
𝑊𝑊𝐾𝐾𝑑𝑑= 𝜏𝜏𝐾𝐾 ∙
1 + 𝑅𝑅2
,
𝑀𝑀𝐾𝐾𝐴𝐴 =𝑀𝑀𝐾𝐾𝐾𝐾 − 𝑀𝑀𝐾𝐾𝐾𝐾
2=
𝑀𝑀𝐾𝐾𝐾𝐾 − 𝑅𝑅 ∙ 𝑀𝑀𝐾𝐾𝐾𝐾
2= 𝑀𝑀𝐾𝐾𝐾𝐾 ∙
1 − 𝑅𝑅2
⟹ 𝜏𝜏𝐴𝐴 =𝑀𝑀𝐾𝐾𝐴𝐴
𝑊𝑊𝐾𝐾𝑑𝑑= 𝜏𝜏𝐾𝐾 ∙
1 − 𝑅𝑅2
.
2. krok – popis materiálu
Pro 𝜎𝜎𝑃𝑃𝑒𝑒 = 750 N ∙ mm−2 a 𝜎𝜎𝐾𝐾𝑒𝑒 = 480 N ∙ mm−2: 𝜎𝜎𝐾𝐾𝑑𝑑 = 800 N ∙ mm−2 ⟹ 𝜏𝜏𝐾𝐾 ≈ 0,6 ∙ 𝜎𝜎𝐾𝐾𝑑𝑑 = 480 N ∙ mm−2,
𝜎𝜎𝐶𝐶𝑑𝑑 = 380 N ∙ mm−2 ⟹ 𝜏𝜏𝐶𝐶 ≈ 0,6 ∙ 𝜎𝜎𝐶𝐶𝑑𝑑 = 228 N ∙ mm−2,
𝜏𝜏𝐹𝐹𝑑𝑑 =𝜏𝜏𝐶𝐶
𝑑𝑑=
2280,1
= 2 280 N ∙ mm−2.
3. krok – popis součásti Pomocí www.efatigue.com jsme odečetli součinitel tvaru: 𝛼𝛼𝑒𝑒 = 1,98 .
Pro výpočet vrubové citlivosti existuje také výpočet pomocí q1 a q2 na základě diagramu, kde nás pro krut bude zajímat pouze velikost q2 určená pro podíl 𝜎𝜎𝐾𝐾𝑒𝑒 𝜎𝜎𝑃𝑃𝑒𝑒⁄ a poloměr 𝜌𝜌:
𝜎𝜎𝐾𝐾𝑒𝑒
𝜎𝜎𝑃𝑃𝑒𝑒=
450 750
= 0,6 a 𝜌𝜌 = 1 mm ⟹ 𝑞𝑞𝑒𝑒 = 𝑞𝑞2 = 0,55 .
Pro známý součinitel tvaru αt a vrubovou citlivost qt již můžeme stanovit součinitel vrubu:
𝛽𝛽𝑒𝑒 = 1 + 𝑞𝑞𝑒𝑒 ∙ (𝛼𝛼𝑒𝑒 − 1) = 1 + 0,55 ∙ (1,98 − 1) = 1,54 .
1,0
0,9
0,8
0,7
0,6
0,5
0,4
0,3
𝒒𝒒 𝟏𝟏( 𝝈𝝈
𝑷𝑷𝑷𝑷)
; 𝒒𝒒 𝟐𝟐
�𝝈𝝈 𝑲𝑲𝑷𝑷
𝝈𝝈 𝑷𝑷𝑷𝑷�
[ 1]
𝜎𝜎𝑃𝑃𝑒𝑒[N ∙ mm−2] 𝜎𝜎𝐾𝐾𝑒𝑒
𝜎𝜎𝑃𝑃𝑒𝑒 [1]
𝑞𝑞 = 𝑞𝑞𝑑𝑑 =𝑞𝑞1 + 𝑞𝑞2
2
𝑞𝑞𝑒𝑒 = 𝑞𝑞2
0,95 0,9
0,8
0,7
0,6
0,5
34
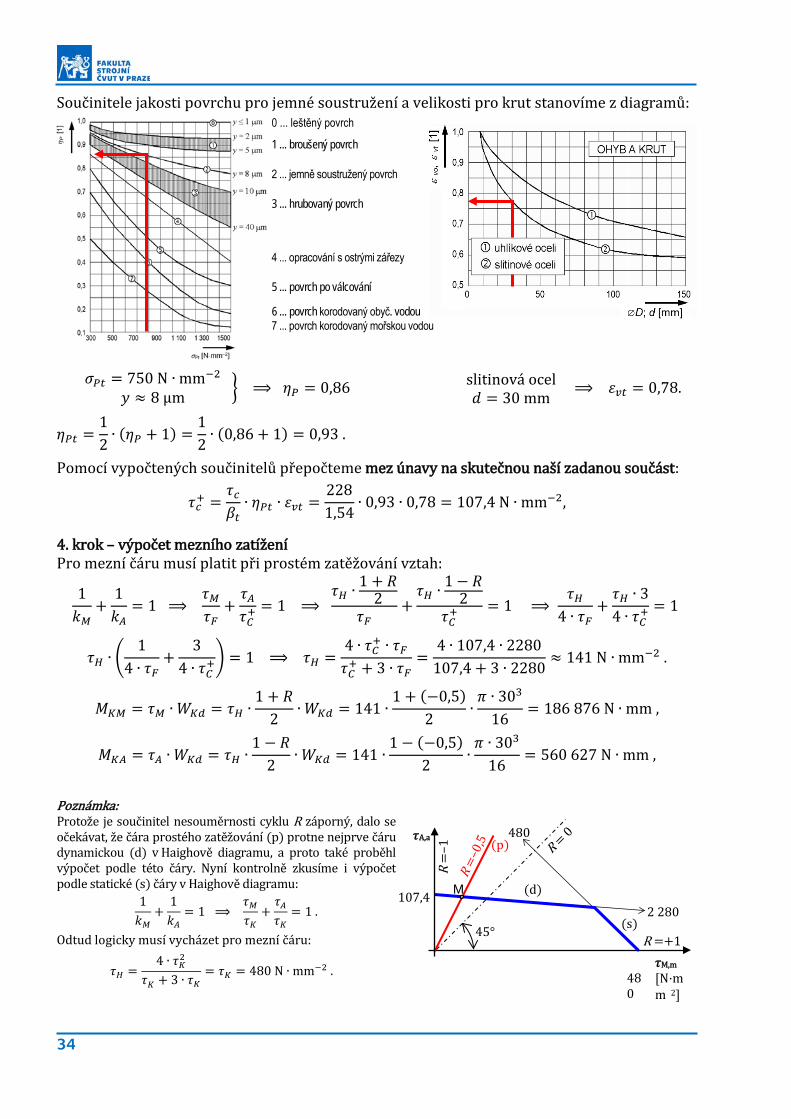
Součinitele jakosti povrchu pro jemné soustružení a velikosti pro krut stanovíme z diagramů:
𝜎𝜎𝑃𝑃𝑒𝑒 = 750 N ∙ mm−2
𝑦𝑦 ≈ 8 μm � ⟹ 𝑑𝑑𝑃𝑃 = 0,86 slitinová ocel𝑑𝑑 = 30 mm ⟹ 𝜀𝜀𝑣𝑣𝑒𝑒 = 0,78.
𝑑𝑑𝑃𝑃𝑒𝑒 =12
∙ (𝑑𝑑𝑃𝑃 + 1) =12
∙ (0,86 + 1) = 0,93 .
Pomocí vypočtených součinitelů přepočteme mez únavy na skutečnou naší zadanou součást:
𝜏𝜏𝑐𝑐+ =
𝜏𝜏𝑐𝑐
𝛽𝛽𝑒𝑒∙ 𝑑𝑑𝑃𝑃𝑒𝑒 ∙ 𝜀𝜀𝑣𝑣𝑒𝑒 =
2281,54
∙ 0,93 ∙ 0,78 = 107,4 N ∙ mm−2,
4. krok – výpočet mezního zatížení Pro mezní čáru musí platit při prostém zatěžování vztah:
1𝑘𝑘𝑀𝑀
+1
𝑘𝑘𝐴𝐴= 1 ⟹
𝜏𝜏𝑀𝑀
𝜏𝜏𝐹𝐹+
𝜏𝜏𝐴𝐴
𝜏𝜏𝐶𝐶+ = 1 ⟹
𝜏𝜏𝐾𝐾 ∙ 1 + 𝑅𝑅2
𝜏𝜏𝐹𝐹+
𝜏𝜏𝐾𝐾 ∙ 1 − 𝑅𝑅2
𝜏𝜏𝐶𝐶+ = 1 ⟹
𝜏𝜏𝐾𝐾
4 ∙ 𝜏𝜏𝐹𝐹+
𝜏𝜏𝐾𝐾 ∙ 34 ∙ 𝜏𝜏𝐶𝐶
+ = 1
𝜏𝜏𝐾𝐾 ∙ �1
4 ∙ 𝜏𝜏𝐹𝐹+
34 ∙ 𝜏𝜏𝐶𝐶
+� = 1 ⟹ 𝜏𝜏𝐾𝐾 =4 ∙ 𝜏𝜏𝐶𝐶
+ ∙ 𝜏𝜏𝐹𝐹
𝜏𝜏𝐶𝐶+ + 3 ∙ 𝜏𝜏𝐹𝐹
=4 ∙ 107,4 ∙ 2280
107,4 + 3 ∙ 2280≈ 141 N ∙ mm−2 .
𝑀𝑀𝐾𝐾𝑀𝑀 = 𝜏𝜏𝑀𝑀 ∙ 𝑊𝑊𝐾𝐾𝑑𝑑 = 𝜏𝜏𝐾𝐾 ∙1 + 𝑅𝑅
2∙ 𝑊𝑊𝐾𝐾𝑑𝑑 = 141 ∙
1 + (−0,5)2
∙𝜋𝜋 ∙ 303
16= 186 876 N ∙ mm ,
𝑀𝑀𝐾𝐾𝐴𝐴 = 𝜏𝜏𝐴𝐴 ∙ 𝑊𝑊𝐾𝐾𝑑𝑑 = 𝜏𝜏𝐾𝐾 ∙1 − 𝑅𝑅
2∙ 𝑊𝑊𝐾𝐾𝑑𝑑 = 141 ∙
1 − (−0,5)2
∙𝜋𝜋 ∙ 303
16= 560 627 N ∙ mm ,
Poznámka: Protože je součinitel nesouměrnosti cyklu R záporný, dalo se očekávat, že čára prostého zatěžování (p) protne nejprve čáru dynamickou (d) v Haighově diagramu, a proto také proběhl výpočet podle této čáry. Nyní kontrolně zkusíme i výpočet podle statické (s) čáry v Haighově diagramu:
1𝑘𝑘𝑀𝑀
+1
𝑘𝑘𝐴𝐴= 1 ⟹
𝜏𝜏𝑀𝑀
𝜏𝜏𝐾𝐾+
𝜏𝜏𝐴𝐴
𝜏𝜏𝐾𝐾= 1 .
Odtud logicky musí vycházet pro mezní čáru:
𝜏𝜏𝐾𝐾 =4 ∙ 𝜏𝜏𝐾𝐾
2
𝜏𝜏𝐾𝐾 + 3 ∙ 𝜏𝜏𝐾𝐾
= 𝜏𝜏𝐾𝐾 = 480 N ∙ mm−2 .
0 ... leštěný povrch
1 ... broušený povrch
2 ... jemně soustružený povrch
3 ... hrubovaný povrch
4 ... opracování s ostrými zářezy
5 ... povrch po válcování
6 ... povrch korodovaný obyč. vodou 7 ... povrch korodovaný mořskou vodou
𝜏𝜏M,m [N·mm 2]
𝜏𝜏A,a
107,4 (d)
(s)
480
2 280
480
M
R =
–1
R =+1
(p)
45°
Pružnost a pevnost II ZS 2018/2019
35
PŘÍKLAD 2.3 (PULZUJÍCÍ TAH):
Dáno: Je dán ojniční šroub, který bude za provozu v důsledku setrvačných sil namáhán amplitudovým napětím σa = ±75 N·mm−2. Základní parametry šroubu jsou: závit M10 ×1 (d3 ≈ 8 mm), materiál AISI 8740 Alloy Steel (UNS G87400) s mezí pevnosti v tahu σPt = 695 N·mm−2, mezí kluzu v tahu σKt = 415 N·mm−2, modulem pružnosti E = 1,96·105 N·mm−2, mezí únavy σc ≈ 0,32·σPt = 220 N·mm−2 a σF ≈ σc/0,15 = 1 467 N·mm−2. Z diagramů jsme odečetli β = 1,69 (součinitel vrubu), ηP = 0,88 (součinitel jakosti povrchu) a εv = 0,96 (součinitel velikosti pro slitinové oceli). Šroub má být provozován s bezpečností k = 2,5 vzhledem k „nekonečné“ únavové životnosti.
Určit: Qm max (maximální předpětí ve šroubu pro zadanou bezpečnost k).
Řešení: Nejprve stanovíme pomocí zadaných parametrů mez únavy skutečného šroubu:
𝜎𝜎𝑐𝑐+ =
𝜎𝜎𝑐𝑐
𝛽𝛽∙ η𝑃𝑃 ∙ 𝜀𝜀𝑣𝑣 =
2201,69
∙ 0,88 ∙ 0,96 ≈ 110 N ∙ mm−2 .
Vztahy pro výpočet středního napětí σm odvodíme z upraveného Haighova diagramu pro konstantní velikost amplitudy σa a proměnnou velikost střední hodnoty σm až do maximální mezní hodnoty σM. Řešení provedeme pro obě části, a to jak statickou (s), tak také pro dynamickou (d), protože neznáme poměr mezi zadaným σa a hledaným σm.
statická čára (s) dynamická čára (d) upraveného Haighova diagramu upraveného Haighova diagramu σM σKt
σm
σa
σKt
σa
M(s)
σM σF σm
σa
σc+
σa
M(d)
𝜎𝜎𝐾𝐾𝐾𝐾 𝜎𝜎𝐹𝐹
σm
σa
𝜎𝜎𝐾𝐾𝐾𝐾
𝜎𝜎𝑐𝑐
+
(s)
(d)
36
Z podobnosti vyšrafovaných trojúhelníků dostáváme vztahy mezi hlavními parametry:
𝜎𝜎𝐾𝐾𝑒𝑒 − 𝜎𝜎𝑀𝑀
𝜎𝜎𝑚𝑚=
𝜎𝜎𝑀𝑀
𝜎𝜎𝐾𝐾𝑒𝑒 − 𝜎𝜎𝑚𝑚 ⟹ 𝜎𝜎𝑀𝑀 = 𝜎𝜎𝐾𝐾𝑒𝑒 − 𝜎𝜎𝑚𝑚 ;
𝜎𝜎𝐹𝐹 − 𝜎𝜎𝑀𝑀
𝜎𝜎𝑚𝑚=
𝜎𝜎𝑀𝑀
𝜎𝜎𝑐𝑐+ − 𝜎𝜎𝑚𝑚
⟹ 𝜎𝜎𝑀𝑀 = 𝜎𝜎𝐹𝐹 − 𝜎𝜎𝑚𝑚 ∙𝜎𝜎𝐹𝐹
𝜎𝜎𝑐𝑐+ .
Pro zachování předepsané bezpečnosti k vůči „nekonečné“ životnosti musí být 𝜎𝜎𝑀𝑀 = 𝑘𝑘 ∙ 𝜎𝜎𝑚𝑚, a tak dosazením do obou vztahů odvozených vztahů dostáváme:
𝜎𝜎𝑚𝑚(s) =
1𝑘𝑘
∙ (𝜎𝜎𝐾𝐾𝑒𝑒 − 𝜎𝜎𝑚𝑚) = 𝜎𝜎𝑚𝑚(d) =
1𝑘𝑘
∙ �𝜎𝜎𝐹𝐹 − 𝜎𝜎𝑚𝑚 ∙𝜎𝜎𝐹𝐹
𝜎𝜎𝑐𝑐+� =
=415 − 75
2,5= 136 N ∙ mm−2 =
1467 − 75 ∙ 1467110
2,5= 187 N ∙ mm−2.
Řešením je menší z obou vypočtených středních napětí z upravených částí Haighova diagramu:
𝜎𝜎𝑚𝑚 = 𝑚𝑚𝑚𝑚𝑚𝑚 �𝜎𝜎𝑚𝑚(s) ; 𝜎𝜎𝑚𝑚
(d)� = 𝜎𝜎𝑚𝑚(s) = 136 N ∙ mm−2
Hledané maximální přípustné předpětí ve šroubu pro zachování dané bezpečnosti bude:
𝑄𝑄𝑚𝑚 𝑚𝑚𝑚𝑚𝑚𝑚 = 𝜎𝜎𝑚𝑚(s) ∙ 𝐴𝐴3 = 𝜎𝜎𝑚𝑚
(s) ∙𝜋𝜋 ∙ 𝑑𝑑3
2
4= 136 ∙
𝜋𝜋 ∙ 82
4≈ 6 836 N .
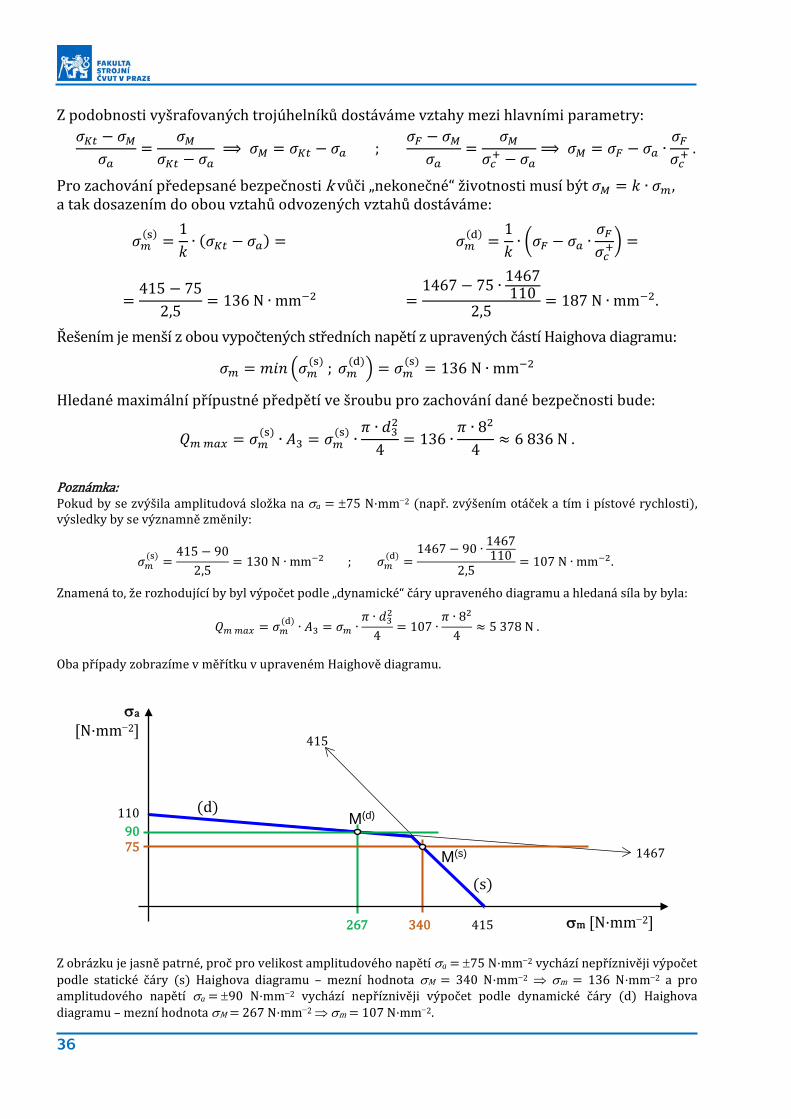
Poznámka: Pokud by se zvýšila amplitudová složka na σa = ±75 N·mm−2 (např. zvýšením otáček a tím i pístové rychlosti), výsledky by se významně změnily:
𝜎𝜎𝑚𝑚(s) =
415 − 902,5
= 130 N ∙ mm−2 ; 𝜎𝜎𝑚𝑚(d) =
1467 − 90 ∙ 1467110
2,5= 107 N ∙ mm−2.
Znamená to, že rozhodující by byl výpočet podle „dynamické“ čáry upraveného diagramu a hledaná síla by byla:
𝑄𝑄𝑚𝑚 𝑚𝑚𝑚𝑚𝑚𝑚 = 𝜎𝜎𝑚𝑚(d) ∙ 𝐴𝐴3 = 𝜎𝜎𝑚𝑚 ∙
𝜋𝜋 ∙ 𝑑𝑑32
4= 107 ∙
𝜋𝜋 ∙ 82
4≈ 5 378 N .
Oba případy zobrazíme v měřítku v upraveném Haighově diagramu.
Z obrázku je jasně patrné, proč pro velikost amplitudového napětí σa = ±75 N·mm−2 vychází nepříznivěji výpočet podle statické čáry (s) Haighova diagramu – mezní hodnota σM = 340 N·mm−2 ⇒ σm = 136 N·mm−2 a pro amplitudového napětí σa = ±90 N·mm−2 vychází nepříznivěji výpočet podle dynamické čáry (d) Haighova diagramu – mezní hodnota σM = 267 N·mm−2 ⇒ σm = 107 N·mm−2.
σm [N·mm−2]
σa [N·mm−2]
110 90 75
(d)
(s)
415
1467
267 340 415
M(s)
M(d)
Pružnost a pevnost II ZS 2018/2019
37
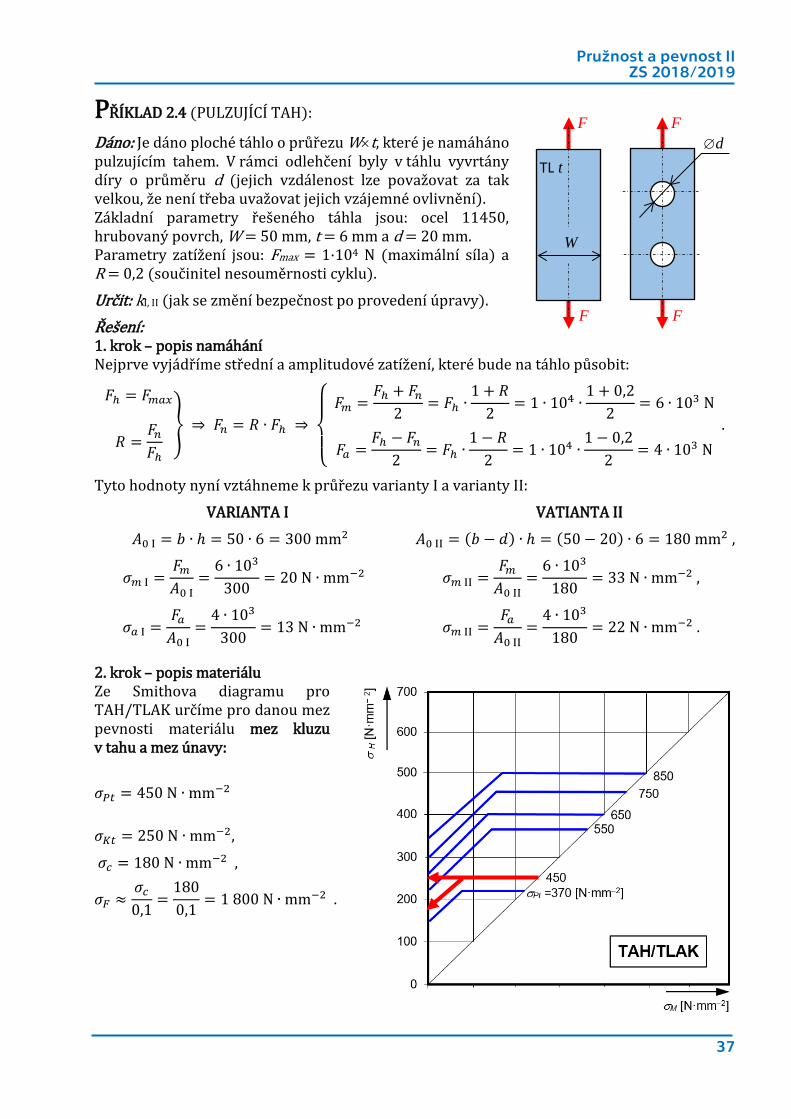
PŘÍKLAD 2.4 (PULZUJÍCÍ TAH):
Dáno: Je dáno ploché táhlo o průřezu W×t, které je namáháno pulzujícím tahem. V rámci odlehčení byly v táhlu vyvrtány díry o průměru d (jejich vzdálenost lze považovat za tak velkou, že není třeba uvažovat jejich vzájemné ovlivnění). Základní parametry řešeného táhla jsou: ocel 11450, hrubovaný povrch, W = 50 mm, t = 6 mm a d = 20 mm. Parametry zatížení jsou: Fmax = 1·104 N (maximální síla) a R = 0,2 (součinitel nesouměrnosti cyklu).
Určit: kI, II (jak se změní bezpečnost po provedení úpravy).
Řešení: 1. krok – popis namáhání Nejprve vyjádříme střední a amplitudové zatížení, které bude na táhlo působit:
𝐹𝐹ℎ = 𝐹𝐹𝑚𝑚𝑚𝑚𝑚𝑚
𝑅𝑅 =𝐹𝐹𝑑𝑑
𝐹𝐹ℎ
� ⇒ 𝐹𝐹𝑑𝑑 = 𝑅𝑅 ∙ 𝐹𝐹ℎ ⇒
⎩⎪⎨
⎪⎧ 𝐹𝐹𝑚𝑚 =
𝐹𝐹ℎ + 𝐹𝐹𝑑𝑑
2= 𝐹𝐹ℎ ∙
1 + 𝑅𝑅2
= 1 ∙ 104 ∙1 + 0,2
2= 6 ∙ 103 N
𝐹𝐹𝑚𝑚 =𝐹𝐹ℎ − 𝐹𝐹𝑑𝑑
2= 𝐹𝐹ℎ ∙
1 − 𝑅𝑅2
= 1 ∙ 104 ∙1 − 0,2
2= 4 ∙ 103 N
.
Tyto hodnoty nyní vztáhneme k průřezu varianty I a varianty II:
VARIANTA I VATIANTA II
𝐴𝐴0 I = 𝑏𝑏 ∙ ℎ = 50 ∙ 6 = 300 mm2 𝐴𝐴0 II = (𝑏𝑏 − 𝑑𝑑) ∙ ℎ = (50 − 20) ∙ 6 = 180 mm2 ,
𝜎𝜎𝑚𝑚 I =𝐹𝐹𝑚𝑚
𝐴𝐴0 I=
6 ∙ 103
300= 20 N ∙ mm−2 𝜎𝜎𝑚𝑚 II =
𝐹𝐹𝑚𝑚
𝐴𝐴0 II=
6 ∙ 103
180= 33 N ∙ mm−2 ,
𝜎𝜎𝑚𝑚 I =𝐹𝐹𝑚𝑚
𝐴𝐴0 I=
4 ∙ 103
300= 13 N ∙ mm−2 𝜎𝜎𝑚𝑚 II =
𝐹𝐹𝑚𝑚
𝐴𝐴0 II=
4 ∙ 103
180= 22 N ∙ mm−2 .
2. krok – popis materiálu Ze Smithova diagramu pro TAH/TLAK určíme pro danou mez pevnosti materiálu mez kluzu v tahu a mez únavy:
𝜎𝜎𝑃𝑃𝑒𝑒 = 450 N ∙ mm−2
𝜎𝜎𝐾𝐾𝑒𝑒 = 250 N ∙ mm−2,
𝜎𝜎𝑐𝑐 = 180 N ∙ mm−2 ,
𝜎𝜎𝐹𝐹 ≈𝜎𝜎𝑐𝑐
0,1=
1800,1
= 1 800 N ∙ mm−2 .
W
TL t ∅d
F F
F F
38
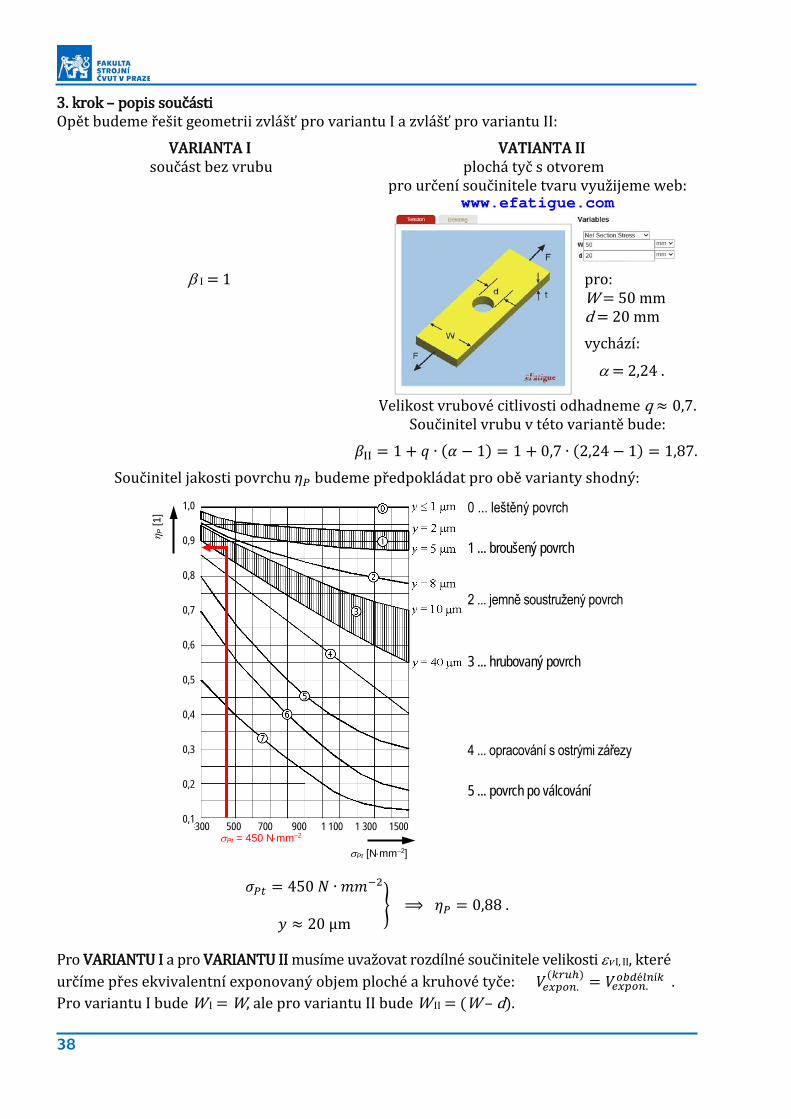
3. krok – popis součásti Opět budeme řešit geometrii zvlášť pro variantu I a zvlášť pro variantu II:
VARIANTA I VATIANTA II součást bez vrubu plochá tyč s otvorem
pro určení součinitele tvaru využijeme web: www.efatigue.com β I = 1 pro:
W = 50 mm d = 20 mm
vychází:
α = 2,24 .
Velikost vrubové citlivosti odhadneme q ≈ 0,7. Součinitel vrubu v této variantě bude:
𝛽𝛽II = 1 + 𝑞𝑞 ∙ (𝛼𝛼 − 1) = 1 + 0,7 ∙ (2,24 − 1) = 1,87.
Součinitel jakosti povrchu 𝑑𝑑𝑃𝑃 budeme předpokládat pro obě varianty shodný:
𝜎𝜎𝑃𝑃𝑒𝑒 = 450 𝑁𝑁 ∙ 𝑚𝑚𝑚𝑚−2
𝑦𝑦 ≈ 20 μm
� ⟹ 𝑑𝑑𝑃𝑃 = 0,88 .
Pro VARIANTU I a pro VARIANTU II musíme uvažovat rozdílné součinitele velikosti εv I, II, které určíme přes ekvivalentní exponovaný objem ploché a kruhové tyče: 𝑉𝑉𝑐𝑐𝑚𝑚𝑝𝑝𝑑𝑑𝑑𝑑.
(𝑐𝑐𝑜𝑜𝑢𝑢ℎ) = 𝑉𝑉𝑐𝑐𝑚𝑚𝑝𝑝𝑑𝑑𝑑𝑑.𝑑𝑑𝑜𝑜𝑑𝑑é𝑑𝑑𝑑𝑑í𝑐𝑐 .
Pro variantu I bude W I = W, ale pro variantu II bude W II = (W – d).
0 ... leštěný povrch
1 ... broušený povrch
2 ... jemně soustružený povrch
3 ... hrubovaný povrch
4 ... opracování s ostrými zářezy
5 ... povrch po válcování
1,0
0,9
0,8
0,7
0,6
0,5
0,4
0,3
0,2
0,1
η P [1
]
300 500 700 900 1 100 1 300 1500
σPt [N⋅mm–2] σPt = 450 N⋅mm–2
Pružnost a pevnost II ZS 2018/2019
39
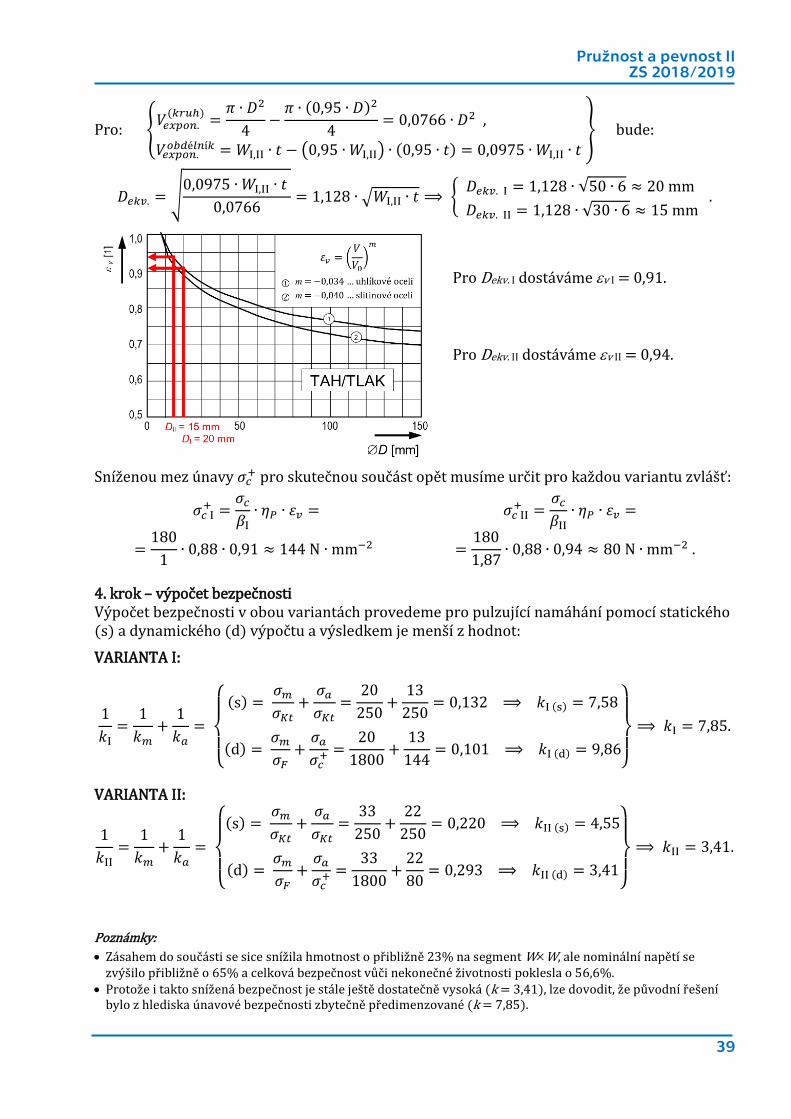
Pro: �𝑉𝑉𝑐𝑐𝑚𝑚𝑝𝑝𝑑𝑑𝑑𝑑.(𝑐𝑐𝑜𝑜𝑢𝑢ℎ) =
𝜋𝜋 ∙ 𝐷𝐷2
4−
𝜋𝜋 ∙ (0,95 ∙ 𝐷𝐷)2
4= 0,0766 ∙ 𝐷𝐷2 ,
𝑉𝑉𝑐𝑐𝑚𝑚𝑝𝑝𝑑𝑑𝑑𝑑.𝑑𝑑𝑜𝑜𝑑𝑑é𝑑𝑑𝑑𝑑í𝑐𝑐 = 𝑊𝑊I,II ∙ 𝐾𝐾 − �0,95 ∙ 𝑊𝑊I,II� ∙ (0,95 ∙ 𝐾𝐾) = 0,0975 ∙ 𝑊𝑊I,II ∙ 𝐾𝐾
� bude:
𝐷𝐷𝑐𝑐𝑐𝑐𝑣𝑣. = �0,0975 ∙ 𝑊𝑊I,II ∙ 𝐾𝐾
0,0766= 1,128 ∙ �𝑊𝑊I,II ∙ 𝐾𝐾 ⟹ � 𝐷𝐷𝑐𝑐𝑐𝑐𝑣𝑣. I = 1,128 ∙ √50 ∙ 6 ≈ 20 mm
𝐷𝐷𝑐𝑐𝑐𝑐𝑣𝑣. II = 1,128 ∙ √30 ∙ 6 ≈ 15 mm .
Pro Dekv. I dostáváme εv I = 0,91. Pro Dekv. II dostáváme εv II = 0,94.
Sníženou mez únavy 𝜎𝜎𝑐𝑐+ pro skutečnou součást opět musíme určit pro každou variantu zvlášť:
𝜎𝜎𝑐𝑐 I+ =
𝜎𝜎𝑐𝑐
𝛽𝛽I∙ 𝑑𝑑𝑃𝑃 ∙ 𝜀𝜀𝑣𝑣 = 𝜎𝜎𝑐𝑐 II
+ =𝜎𝜎𝑐𝑐
𝛽𝛽II∙ 𝑑𝑑𝑃𝑃 ∙ 𝜀𝜀𝑣𝑣 =
=180
1∙ 0,88 ∙ 0,91 ≈ 144 N ∙ mm−2 =
1801,87
∙ 0,88 ∙ 0,94 ≈ 80 N ∙ mm−2 .
4. krok – výpočet bezpečnosti Výpočet bezpečnosti v obou variantách provedeme pro pulzující namáhání pomocí statického (s) a dynamického (d) výpočtu a výsledkem je menší z hodnot:
VARIANTA I:
1𝑘𝑘I
=1
𝑘𝑘𝑚𝑚+
1𝑘𝑘𝑚𝑚
=
⎩⎪⎨
⎪⎧ (s) =
𝜎𝜎𝑚𝑚
𝜎𝜎𝐾𝐾𝑒𝑒+
𝜎𝜎𝑚𝑚
𝜎𝜎𝐾𝐾𝑒𝑒=
20250
+13
250= 0,132 ⟹ 𝑘𝑘I (s) = 7,58
(d) = 𝜎𝜎𝑚𝑚
𝜎𝜎𝐹𝐹+
𝜎𝜎𝑚𝑚
𝜎𝜎𝑐𝑐+ =
201800
+13
144= 0,101 ⟹ 𝑘𝑘I (d) = 9,86
⎭⎪⎬
⎪⎫
⟹ 𝑘𝑘I = 7,85.
VARIANTA II:
1𝑘𝑘II
=1
𝑘𝑘𝑚𝑚+
1𝑘𝑘𝑚𝑚
=
⎩⎪⎨
⎪⎧(s) =
𝜎𝜎𝑚𝑚
𝜎𝜎𝐾𝐾𝑒𝑒+
𝜎𝜎𝑚𝑚
𝜎𝜎𝐾𝐾𝑒𝑒=
33250
+22
250= 0,220 ⟹ 𝑘𝑘II (s) = 4,55
(d) = 𝜎𝜎𝑚𝑚
𝜎𝜎𝐹𝐹+
𝜎𝜎𝑚𝑚
𝜎𝜎𝑐𝑐+ =
331800
+2280
= 0,293 ⟹ 𝑘𝑘II (d) = 3,41⎭⎪⎬
⎪⎫
⟹ 𝑘𝑘II = 3,41.
Poznámky: • Zásahem do součásti se sice snížila hmotnost o přibližně 23% na segment W×W, ale nominální napětí se
zvýšilo přibližně o 65% a celková bezpečnost vůči nekonečné životnosti poklesla o 56,6%. • Protože i takto snížená bezpečnost je stále ještě dostatečně vysoká (k = 3,41), lze dovodit, že původní řešení
bylo z hlediska únavové bezpečnosti zbytečně předimenzované (k = 7,85).
40
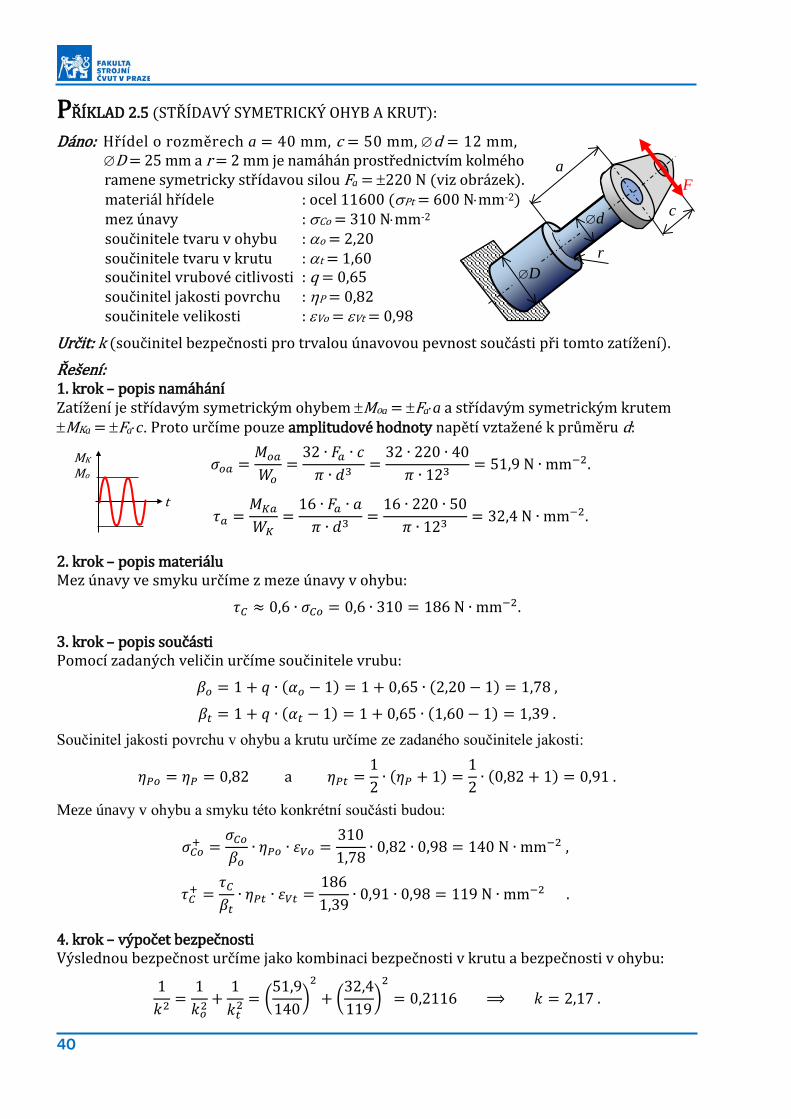
PŘÍKLAD 2.5 (STŘÍDAVÝ SYMETRICKÝ OHYB A KRUT):
Dáno: Hřídel o rozměrech a = 40 mm, c = 50 mm, ∅d = 12 mm, ∅D = 25 mm a r = 2 mm je namáhán prostřednictvím kolmého ramene symetricky střídavou silou Fa = ±220 N (viz obrázek). materiál hřídele : ocel 11600 (σPt = 600 N⋅mm-2) mez únavy : σCo = 310 N⋅mm-2 součinitele tvaru v ohybu : αo = 2,20 součinitele tvaru v krutu : αt = 1,60 součinitel vrubové citlivosti : q = 0,65 součinitel jakosti povrchu : ηP = 0,82 součinitele velikosti : εVo = εVt = 0,98
Určit: k (součinitel bezpečnosti pro trvalou únavovou pevnost součásti při tomto zatížení).
Řešení: 1. krok – popis namáhání Zatížení je střídavým symetrickým ohybem ±Moa = ±Fa⋅a a střídavým symetrickým krutem ±MKa = ±Fa⋅c. Proto určíme pouze amplitudové hodnoty napětí vztažené k průměru d:
𝜎𝜎𝑑𝑑𝑚𝑚 =𝑀𝑀𝑑𝑑𝑚𝑚
𝑊𝑊𝑑𝑑=
32 ∙ 𝐹𝐹𝑚𝑚 ∙ 𝑐𝑐𝜋𝜋 ∙ 𝑑𝑑3 =
32 ∙ 220 ∙ 40𝜋𝜋 ∙ 123 = 51,9 N ∙ mm−2.
𝜏𝜏𝑚𝑚 =𝑀𝑀𝐾𝐾𝑚𝑚
𝑊𝑊𝐾𝐾=
16 ∙ 𝐹𝐹𝑚𝑚 ∙ 𝑎𝑎𝜋𝜋 ∙ 𝑑𝑑3 =
16 ∙ 220 ∙ 50𝜋𝜋 ∙ 123 = 32,4 N ∙ mm−2.
2. krok – popis materiálu Mez únavy ve smyku určíme z meze únavy v ohybu:
𝜏𝜏𝐶𝐶 ≈ 0,6 ∙ 𝜎𝜎𝐶𝐶𝑑𝑑 = 0,6 ∙ 310 = 186 N ∙ mm−2.
3. krok – popis součásti Pomocí zadaných veličin určíme součinitele vrubu:
𝛽𝛽𝑑𝑑 = 1 + 𝑞𝑞 ∙ (𝛼𝛼𝑑𝑑 − 1) = 1 + 0,65 ∙ (2,20 − 1) = 1,78 , 𝛽𝛽𝑒𝑒 = 1 + 𝑞𝑞 ∙ (𝛼𝛼𝑒𝑒 − 1) = 1 + 0,65 ∙ (1,60 − 1) = 1,39 .
Součinitel jakosti povrchu v ohybu a krutu určíme ze zadaného součinitele jakosti:
𝑑𝑑𝑃𝑃𝑑𝑑 = 𝑑𝑑𝑃𝑃 = 0,82 a 𝑑𝑑𝑃𝑃𝑒𝑒 =12
∙ (𝑑𝑑𝑃𝑃 + 1) =12
∙ (0,82 + 1) = 0,91 .
Meze únavy v ohybu a smyku této konkrétní součásti budou:
𝜎𝜎𝐶𝐶𝑑𝑑+ =
𝜎𝜎𝐶𝐶𝑑𝑑
𝛽𝛽𝑑𝑑∙ 𝑑𝑑𝑃𝑃𝑑𝑑 ∙ 𝜀𝜀𝑉𝑉𝑑𝑑 =
3101,78
∙ 0,82 ∙ 0,98 = 140 N ∙ mm−2 ,
𝜏𝜏𝐶𝐶+ =
𝜏𝜏𝐶𝐶
𝛽𝛽𝑒𝑒∙ 𝑑𝑑𝑃𝑃𝑒𝑒 ∙ 𝜀𝜀𝑉𝑉𝑒𝑒 =
1861,39
∙ 0,91 ∙ 0,98 = 119 N ∙ mm−2 .
4. krok – výpočet bezpečnosti Výslednou bezpečnost určíme jako kombinaci bezpečnosti v krutu a bezpečnosti v ohybu:
1𝑘𝑘2 =
1𝑘𝑘𝑑𝑑
2 +1
𝑘𝑘𝑒𝑒2 = �
51,9140
�2
+ �32,4119
�2
= 0,2116 ⟹ 𝑘𝑘 = 2,17 .
t
MK Mo
c
a F
r
∅d
∅D
Pružnost a pevnost II ZS 2018/2019
41
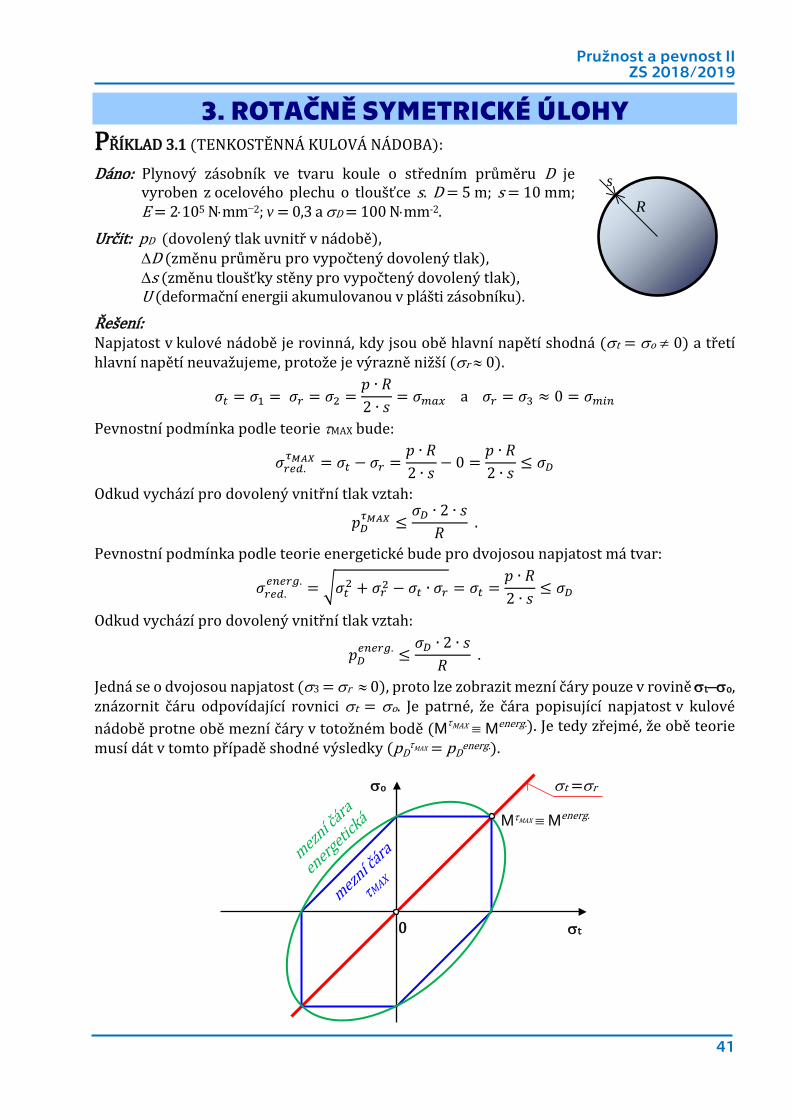
3. ROTAČNĚ SYMETRICKÉ ÚLOHY PŘÍKLAD 3.1 (TENKOSTĚNNÁ KULOVÁ NÁDOBA):
Dáno: Plynový zásobník ve tvaru koule o středním průměru D je vyroben z ocelového plechu o tloušťce s. D = 5 m; s = 10 mm; E = 2⋅105 N⋅mm−2; v = 0,3 a σD = 100 N⋅mm-2.
Určit: pD (dovolený tlak uvnitř v nádobě), ∆D (změnu průměru pro vypočtený dovolený tlak), ∆s (změnu tloušťky stěny pro vypočtený dovolený tlak), U (deformační energii akumulovanou v plášti zásobníku).
Řešení: Napjatost v kulové nádobě je rovinná, kdy jsou obě hlavní napětí shodná (σt = σo ≠ 0) a třetí hlavní napětí neuvažujeme, protože je výrazně nižší (σr ≈ 0).
𝜎𝜎𝑒𝑒 = 𝜎𝜎1 = 𝜎𝜎𝑜𝑜 = 𝜎𝜎2 =𝑝𝑝 ∙ 𝑅𝑅2 ∙ 𝑑𝑑
= 𝜎𝜎𝑚𝑚𝑚𝑚𝑚𝑚 a 𝜎𝜎𝑜𝑜 = 𝜎𝜎3 ≈ 0 = 𝜎𝜎𝑚𝑚𝑖𝑖𝑑𝑑
Pevnostní podmínka podle teorie τMAX bude:
𝜎𝜎𝑜𝑜𝑐𝑐𝑑𝑑.𝜏𝜏𝑀𝑀𝐴𝐴𝑀𝑀 = 𝜎𝜎𝑒𝑒 − 𝜎𝜎𝑜𝑜 =
𝑝𝑝 ∙ 𝑅𝑅2 ∙ 𝑑𝑑
− 0 =𝑝𝑝 ∙ 𝑅𝑅2 ∙ 𝑑𝑑
≤ 𝜎𝜎𝐷𝐷
Odkud vychází pro dovolený vnitřní tlak vztah:
𝑝𝑝𝐷𝐷𝜏𝜏𝑀𝑀𝐴𝐴𝑀𝑀 ≤
𝜎𝜎𝐷𝐷 ∙ 2 ∙ 𝑑𝑑𝑅𝑅
.
Pevnostní podmínka podle teorie energetické bude pro dvojosou napjatost má tvar:
𝜎𝜎𝑜𝑜𝑐𝑐𝑑𝑑.𝑐𝑐𝑑𝑑𝑐𝑐𝑜𝑜𝑒𝑒. = �𝜎𝜎𝑒𝑒
2 + 𝜎𝜎𝑜𝑜2 − 𝜎𝜎𝑒𝑒 ∙ 𝜎𝜎𝑜𝑜 = 𝜎𝜎𝑒𝑒 =
𝑝𝑝 ∙ 𝑅𝑅2 ∙ 𝑑𝑑
≤ 𝜎𝜎𝐷𝐷
Odkud vychází pro dovolený vnitřní tlak vztah:
𝑝𝑝𝐷𝐷𝑐𝑐𝑑𝑑𝑐𝑐𝑜𝑜𝑒𝑒. ≤
𝜎𝜎𝐷𝐷 ∙ 2 ∙ 𝑑𝑑𝑅𝑅
.
Jedná se o dvojosou napjatost (σ3 = σr ≈ 0), proto lze zobrazit mezní čáry pouze v rovině σt−σo, znázornit čáru odpovídající rovnici σt = σo. Je patrné, že čára popisující napjatost v kulové nádobě protne obě mezní čáry v totožném bodě (MτMAX ≡ Menerg.). Je tedy zřejmé, že obě teorie musí dát v tomto případě shodné výsledky (pD
τMAX = pDenerg.).
R s
σt
σo
0
MτMAX ≡ Menerg.
σt =σr

42
Hledaný dovolený tlak tedy bude mít podle obou teorií stejnou hodnotu:
𝑝𝑝𝐷𝐷𝜏𝜏𝑀𝑀𝐴𝐴𝑀𝑀 = 𝑝𝑝𝐷𝐷
𝑐𝑐𝑑𝑑𝑐𝑐𝑜𝑜𝑒𝑒. = 𝑝𝑝𝐷𝐷 ≤𝜎𝜎𝐷𝐷 ∙ 𝑑𝑑
𝑅𝑅=
100 ∙ 2 ∙ 105000
2= 0,80 MPa
Výsledné tečné a osové napětí v nádobě bude:
𝜎𝜎𝑒𝑒 = 𝜎𝜎𝑑𝑑 =0,40 ∙ 2500
2 ∙ 10= 100 N ∙ mm−2.
Pro tento tlak, resp. napjatost ve stěně kulové nádoby určíme pomocí rozšířeného Hookova zákona hledané deformace pláště nádoby:
∆𝑅𝑅 = 𝑅𝑅 ∙ 𝜀𝜀𝑒𝑒(𝑝𝑝𝐷𝐷 ) =
𝑅𝑅𝐸𝐸
∙ {𝜎𝜎𝑒𝑒 − 𝜈𝜈 ∙ [𝜎𝜎𝑜𝑜 + 𝜎𝜎𝑑𝑑]} =2500
2 ∙ 105 ∙ (100 − 0,3 ∙ 100) = 0,875 mm
∆𝑑𝑑 = 𝑑𝑑 ∙ 𝜀𝜀𝑜𝑜(𝑝𝑝𝐷𝐷 ) =
𝑑𝑑𝐸𝐸
∙ {𝜎𝜎𝑜𝑜 − 𝜈𝜈 ∙ [𝜎𝜎𝑒𝑒 + 𝜎𝜎𝑑𝑑]} =10
2 ∙ 105 ∙ [0 − 0,3 ∙ (100 + 100)] = −0,003 mm
Deformační energie akumulovaná v plášti plynového zásobníku bude pro pD:
𝑈𝑈 = � 𝜆𝜆 ∙ 𝑑𝑑𝑉𝑉
(𝑉𝑉)
𝜆𝜆=𝑐𝑐𝑑𝑑𝑑𝑑𝑘𝑘𝑒𝑒.������� 𝜆𝜆 ∙ 𝑉𝑉 = 𝜆𝜆 ∙ 𝑆𝑆 ∙ 𝑑𝑑,
kde: λ … hustota deformační energie pro dvojosou napjatost (σt = σo)
𝜆𝜆 =12
∙ 𝜎𝜎𝑒𝑒 ∙ 𝜀𝜀𝑒𝑒 +12
∙ 𝜎𝜎𝑑𝑑 ∙ 𝜀𝜀𝑑𝑑 =12
∙ 𝜎𝜎𝑒𝑒 ∙1𝐸𝐸
∙ (𝜎𝜎𝑒𝑒 − 𝜈𝜈 ∙ 𝜎𝜎𝑑𝑑) +12
∙ 𝜎𝜎𝑑𝑑 ∙1𝐸𝐸
∙ (𝜎𝜎𝑑𝑑 − 𝜈𝜈 ∙ 𝜎𝜎𝑒𝑒) =
=1
2 ∙ 𝐸𝐸∙ (𝜎𝜎𝑒𝑒
2 + 𝜎𝜎𝑑𝑑2 − 2 ∙ 𝜈𝜈 ∙ 𝜎𝜎𝑒𝑒 ∙ 𝜎𝜎𝑑𝑑) =
𝜎𝜎𝑒𝑒2
𝐸𝐸∙ (1 − 𝜈𝜈) =
1002
2 ∙ 105 ∙ (1 − 0,3) = 0,035 N ∙ mm−2
S … povrch koule dané středním průměrem D 𝑆𝑆 = 𝜋𝜋 ∙ 𝐷𝐷2 = 𝜋𝜋 ∙ 50002 = 78 539 816 mm2
V … objem pláště koule dané středním průměrem D a tloušťkou stěny s:
𝑉𝑉 = 𝑆𝑆 ∙ 𝑑𝑑 = 78 539 816 ∙ 10 = 785 398 160 mm3
Velikost celkové deformační energie U akumulované v plášti kulového zásobníku pro dovolený vnitřní tlak pD je:
𝑈𝑈 = 0,035 ∙ 785 398 160 = 27 488 936 N ∙ mm ≈ 27,5 kN ∙ m .

Pružnost a pevnost II ZS 2018/2019
43
PŘÍKLAD 3.2 (TENKOSTĚNNÁ KULOVÁ NÁDOBA):
Dáno: p ; R ; s ; E a ν.
Určit: σ1 a σ2 (hlavní napětí vznikající v plášti nádoby), pD (dovolený tlak podle teorie τMAX), ∆R a ∆s (změny hlavních rozměrů nádoby), U (celkovou deformační energii akumulovanou v plášti nádoby).
Řešení: Základem řešení je Laplaceova rovnice upravená pro předpoklady:
R1 = R2 = R ⇒ σt = σo = σ1 = σ2 = σ (σ3 ≈ 0).
(u kulové nádoby nelze rozhodnout, který směr je tečný a který směr je osový, protože tyto podmínky kterékoliv dva navzájem kolmé směry v tečné rovině k povrchu kulového pláště).
Po dosazení do Laplaceovy rovnice dostáváme:
𝜎𝜎𝑅𝑅
+𝜎𝜎𝑅𝑅
=𝑝𝑝𝑑𝑑
odkud vychází 𝜎𝜎𝑒𝑒 = 𝜎𝜎𝑑𝑑 = 𝜎𝜎 =𝑝𝑝 ∙ 𝑅𝑅2 ∙ 𝑑𝑑
Pevnostní podmínka podle hypotézy τMAX bude mít tvar:
𝜎𝜎𝑜𝑜𝑐𝑐𝑑𝑑.𝜏𝜏𝑀𝑀𝐴𝐴𝑀𝑀 = 𝜎𝜎𝑒𝑒 − 𝜎𝜎𝑜𝑜 =
𝑝𝑝 ∙ 𝑅𝑅2 ∙ 𝑑𝑑
− 0 =𝑝𝑝 ∙ 𝑅𝑅2 ∙ 𝑑𝑑
≤ 𝜎𝜎𝐷𝐷 ⟹ 𝑝𝑝𝐷𝐷𝜏𝜏𝑀𝑀𝐴𝐴𝑀𝑀 ≤
𝜎𝜎𝐷𝐷 ∙ 2 ∙ 𝑑𝑑𝑅𝑅
(nejmenším – minimálním – napětím je v tomto případě třetí – nulové – napětí σ3).
Pro výpočet změn hlavních rozměrů nádoby použijeme rozšířený Hookův zákon pro rovinnou napjatost (σ3 = σr ≈ 0):
∆𝑅𝑅 = 𝑅𝑅 ∙ 𝜀𝜀𝑒𝑒 =𝑅𝑅𝐸𝐸
∙ {𝜎𝜎𝑒𝑒 − 𝜈𝜈 ∙ 𝜎𝜎𝑑𝑑} =𝑝𝑝 ∙ 𝑅𝑅2
2 ∙ 𝐸𝐸 ∙ 𝑑𝑑∙ (1 − 𝜈𝜈) ; ∆𝑑𝑑 = 𝑑𝑑 ∙ 𝜀𝜀𝑅𝑅 =
𝑑𝑑𝐸𝐸
∙ {−𝜈𝜈 ∙ (𝜎𝜎𝑒𝑒 + 𝜎𝜎𝑑𝑑)} = −𝜈𝜈𝑝𝑝 ∙ 𝑅𝑅
𝐸𝐸.
Celkovou deformační energii U určíme pomocí hustoty deformační energie λ a objemu V pláště nádoby (objem pláště tenkostěnné kulové nádoby vypočteme jako V ≈ S⋅s, kde S je povrch koule a s je tloušťka):
𝑈𝑈 = � 𝜆𝜆 ∙ 𝑑𝑑𝑉𝑉
(𝑉𝑉)
𝜆𝜆=𝑐𝑐𝑑𝑑𝑑𝑑𝑘𝑘𝑒𝑒.������� 𝜆𝜆 ∙ 𝑉𝑉 =
12
∙ (𝜎𝜎𝑒𝑒 ∙ 𝜀𝜀𝑒𝑒 + 𝜎𝜎𝑑𝑑 ∙ 𝜀𝜀𝑑𝑑) ∙ 𝑆𝑆 ∙ 𝑑𝑑.
Po dosazení dostáváme:
𝑈𝑈 =𝜎𝜎
2
𝐸𝐸∙ (1 − 𝑣𝑣) ∙ 4 ∙ 𝜋𝜋 ∙ 𝑅𝑅2 ∙ 𝑑𝑑 = 2 ∙ 𝜋𝜋 ∙
𝑝𝑝2 ∙ 𝑅𝑅4
𝐸𝐸 ∙ 𝑑𝑑∙ (1 − 𝑣𝑣).
Na závěr provedeme rozměrovou kontrolu výsledku:
[U] = [1] ∙[N ∙ m−2]2 ∙ [m]4
[N ∙ m2] ∙ [m] ∙ [1] = [N ∙ m] … vše je v pořádku!
R
s
1
2
3
σ1 σ1
σ2
σ2
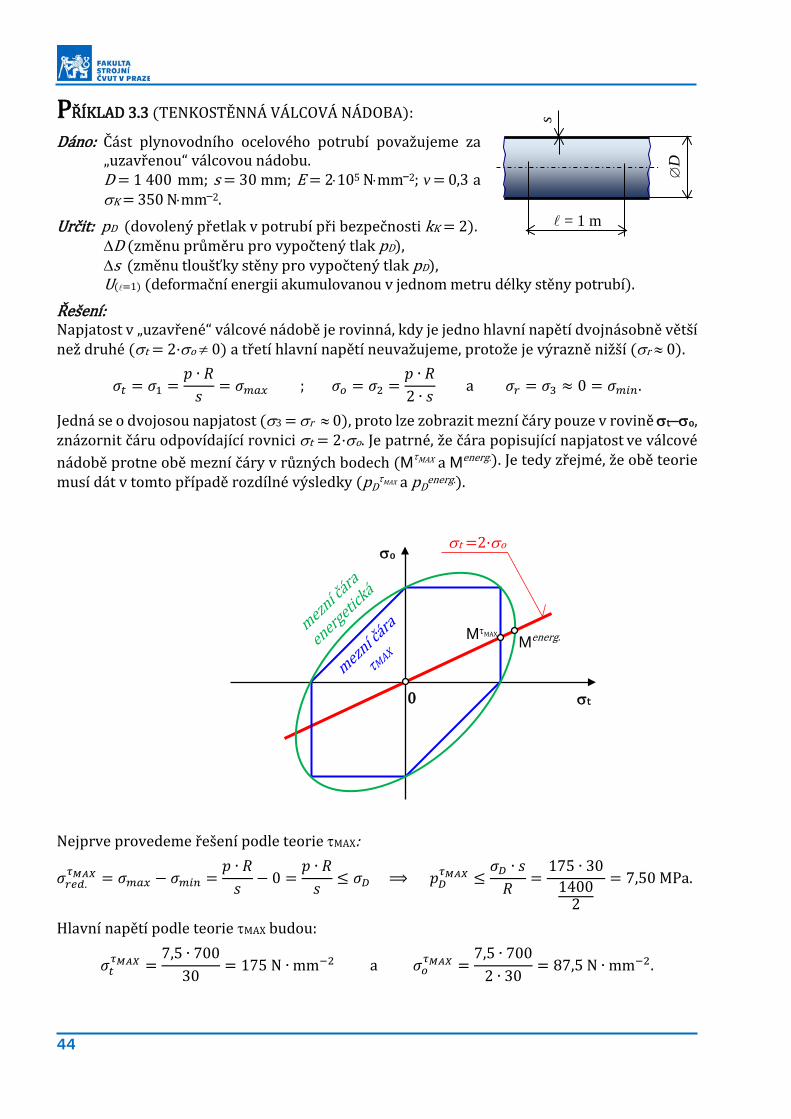
44
PŘÍKLAD 3.3 (TENKOSTĚNNÁ VÁLCOVÁ NÁDOBA):
Dáno: Část plynovodního ocelového potrubí považujeme za „uzavřenou“ válcovou nádobu. D = 1 400 mm; s = 30 mm; E = 2⋅105 N⋅mm−2; v = 0,3 a σK = 350 N⋅mm−2.
Určit: pD (dovolený přetlak v potrubí při bezpečnosti kK = 2). ∆D (změnu průměru pro vypočtený tlak pD), ∆s (změnu tloušťky stěny pro vypočtený tlak pD), U(=1) (deformační energii akumulovanou v jednom metru délky stěny potrubí).
Řešení: Napjatost v „uzavřené“ válcové nádobě je rovinná, kdy je jedno hlavní napětí dvojnásobně větší než druhé (σt = 2·σo ≠ 0) a třetí hlavní napětí neuvažujeme, protože je výrazně nižší (σr ≈ 0).
𝜎𝜎𝑒𝑒 = 𝜎𝜎1 =𝑝𝑝 ∙ 𝑅𝑅
𝑑𝑑= 𝜎𝜎𝑚𝑚𝑚𝑚𝑚𝑚 ; 𝜎𝜎𝑑𝑑 = 𝜎𝜎2 =
𝑝𝑝 ∙ 𝑅𝑅2 ∙ 𝑑𝑑
a 𝜎𝜎𝑜𝑜 = 𝜎𝜎3 ≈ 0 = 𝜎𝜎𝑚𝑚𝑖𝑖𝑑𝑑.
Jedná se o dvojosou napjatost (σ3 = σr ≈ 0), proto lze zobrazit mezní čáry pouze v rovině σt−σo, znázornit čáru odpovídající rovnici σt = 2·σo. Je patrné, že čára popisující napjatost ve válcové nádobě protne obě mezní čáry v různých bodech (MτMAX a Menerg.). Je tedy zřejmé, že obě teorie musí dát v tomto případě rozdílné výsledky (pD
τMAX a pDenerg.). Nejprve provedeme řešení podle teorie τMAX:
𝜎𝜎𝑜𝑜𝑐𝑐𝑑𝑑.𝜏𝜏𝑀𝑀𝐴𝐴𝑀𝑀 = 𝜎𝜎𝑚𝑚𝑚𝑚𝑚𝑚 − 𝜎𝜎𝑚𝑚𝑖𝑖𝑑𝑑 =
𝑝𝑝 ∙ 𝑅𝑅𝑑𝑑
− 0 =𝑝𝑝 ∙ 𝑅𝑅
𝑑𝑑≤ 𝜎𝜎𝐷𝐷 ⟹ 𝑝𝑝𝐷𝐷
𝜏𝜏𝑀𝑀𝐴𝐴𝑀𝑀 ≤𝜎𝜎𝐷𝐷 ∙ 𝑑𝑑
𝑅𝑅=
175 ∙ 301400
2= 7,50 MPa.
Hlavní napětí podle teorie τMAX budou:
𝜎𝜎𝑒𝑒𝜏𝜏𝑀𝑀𝐴𝐴𝑀𝑀 =
7,5 ∙ 70030
= 175 N ∙ mm−2 a 𝜎𝜎𝑑𝑑𝜏𝜏𝑀𝑀𝐴𝐴𝑀𝑀 =
7,5 ∙ 7002 ∙ 30
= 87,5 N ∙ mm−2.
∅D
s
= 1 m
σt
σo
0
Menerg.
σt =2·σo
MτMAX

Pružnost a pevnost II ZS 2018/2019
45
Obě deformace (poloměru a tloušťky stěny) určíme pomocí rozšířeného Hookova zákona, který se v tomto případě velmi zjednoduší (σ3 = σr ≈ 0):
∆𝐷𝐷𝜏𝜏𝑀𝑀𝐴𝐴𝑀𝑀 = 𝐷𝐷 ∙ 𝜀𝜀𝑒𝑒�𝑝𝑝𝐷𝐷𝜏𝜏𝑀𝑀𝐴𝐴𝑀𝑀� =
𝐷𝐷𝐸𝐸
∙ �𝜎𝜎𝑒𝑒𝜏𝜏𝑀𝑀𝐴𝐴𝑀𝑀 − 𝜈𝜈 ∙ �𝜎𝜎𝑜𝑜 + 𝜎𝜎𝑑𝑑
𝜏𝜏𝑀𝑀𝐴𝐴𝑀𝑀�� =𝐷𝐷𝐸𝐸
∙ 𝜎𝜎𝑒𝑒𝜏𝜏𝑀𝑀𝐴𝐴𝑀𝑀 ∙ �1 −
𝜈𝜈2
�
∆𝐷𝐷𝜏𝜏𝑀𝑀𝐴𝐴𝑀𝑀 =1400
2 ∙ 105 ∙ 175 ∙ �1 −0,32
� = 1,041 mm
∆𝑑𝑑𝜏𝜏𝑀𝑀𝐴𝐴𝑀𝑀 = 𝑑𝑑 ∙ 𝜀𝜀𝑜𝑜�𝑝𝑝𝐷𝐷𝜏𝜏𝑀𝑀𝐴𝐴𝑀𝑀� =
𝑑𝑑𝐸𝐸
∙ �𝜎𝜎𝑜𝑜 − 𝜈𝜈 ∙ �𝜎𝜎𝑒𝑒𝜏𝜏𝑀𝑀𝐴𝐴𝑀𝑀 + 𝜎𝜎𝑑𝑑
𝜏𝜏𝑀𝑀𝐴𝐴𝑀𝑀�� =𝑑𝑑𝐸𝐸
∙ 𝜎𝜎𝑒𝑒𝜏𝜏𝑀𝑀𝐴𝐴𝑀𝑀 ∙ �−
3 ∙ 𝜈𝜈2
�
∆𝑑𝑑𝜏𝜏𝑀𝑀𝐴𝐴𝑀𝑀 =30
2 ∙ 105 ∙ 175 ∙ �3 ∙ 0,3
2� = −0,0118 mm
Deformační energie akumulovaná v jednom metru válcového plynového potrubí bude pro pD:
𝑈𝑈 = � 𝜆𝜆 ∙ 𝑑𝑑𝑉𝑉
(𝑉𝑉)
𝜆𝜆=𝑐𝑐𝑑𝑑𝑑𝑑𝑘𝑘𝑒𝑒.������� 𝜆𝜆 ∙ 𝑉𝑉 = 𝜆𝜆 ∙ 𝑆𝑆 ∙ 𝑑𝑑,
kde: λ … hustota deformační energie pro dvojosou napjatost (σt = 2·σo)
𝜆𝜆 =12
∙ 𝜎𝜎𝑒𝑒 ∙ 𝜀𝜀𝑒𝑒 +12
∙ 𝜎𝜎𝑑𝑑 ∙ 𝜀𝜀𝑑𝑑 =12
∙ 𝜎𝜎𝑒𝑒 ∙1𝐸𝐸
∙ (𝜎𝜎𝑒𝑒 − 𝜈𝜈 ∙ 𝜎𝜎𝑑𝑑) +12
∙ 𝜎𝜎𝑑𝑑 ∙1𝐸𝐸
∙ (𝜎𝜎𝑑𝑑 − 𝜈𝜈 ∙ 𝜎𝜎𝑒𝑒) =
=𝜎𝜎𝑒𝑒
2
𝐸𝐸∙ �
12
−𝜈𝜈4
+18
−𝜈𝜈4
� =𝜎𝜎𝑒𝑒
2
𝐸𝐸∙ �
58
−𝜈𝜈2
� =1752
2 ∙ 105 ∙ �58
−0,32
� =
= 0,073 N ∙ mm−2
S(ℓ=1) … povrch válce daného středním průměrem D a délkou 1 m:
𝑆𝑆(ℓ=1) = 𝜋𝜋 ∙ 𝐷𝐷 ∙ ℓ = 𝜋𝜋 ∙ 1400 ∙ 1000 = 4 398 230 mm2
V(ℓ=1) … objem pláště válce daného středním průměrem D, délky ℓ a tloušťkou stěny s:
𝑉𝑉(ℓ=1) = 𝑆𝑆(ℓ=1) ∙ 𝑑𝑑 = 4 398 160 ∙ 30 = 131 944 800 mm3
Velikost celkové deformační energie akumulované v plášti kulového zásobníku pro dovolený tlak stanovený pomocí teorie τMAX je:
𝑈𝑈(ℓ=1) = 0,073 ∙ 131 944 800 = 9 631 970 N ∙ mm ≈ 9,6 kN ∙ m
Dále provedeme řešení podle teorie energetické:
𝜎𝜎𝑜𝑜𝑐𝑐𝑑𝑑.𝑐𝑐𝑑𝑑𝑐𝑐𝑜𝑜𝑒𝑒. =
√22
∙ �(𝜎𝜎𝑒𝑒 − 𝜎𝜎𝑜𝑜)2 + (𝜎𝜎𝑜𝑜 − 𝜎𝜎𝑑𝑑)2 + (𝜎𝜎𝑑𝑑 − 𝜎𝜎𝑒𝑒)2 = �𝜎𝜎𝑒𝑒2 + 𝜎𝜎𝑜𝑜
2 − 𝜎𝜎𝑒𝑒 ∙ 𝜎𝜎𝑜𝑜 ≤ 𝜎𝜎𝐷𝐷
𝜎𝜎𝑜𝑜𝑐𝑐𝑑𝑑.𝑐𝑐𝑑𝑑𝑐𝑐𝑜𝑜𝑒𝑒. = ��
𝑝𝑝 ∙ 𝑅𝑅𝑑𝑑
�2
+ �𝑝𝑝 ∙ 𝑅𝑅2 ∙ 𝑑𝑑
�2
− �𝑝𝑝 ∙ 𝑅𝑅
𝑑𝑑� ∙ �
𝑝𝑝 ∙ 𝑅𝑅2 ∙ 𝑑𝑑
� =𝑝𝑝 ∙ 𝑅𝑅
𝑑𝑑∙
√32
≈ 0,866 ∙𝑝𝑝 ∙ 𝑅𝑅
𝑑𝑑≤ 𝜎𝜎𝐷𝐷
Hledaný dovolený vnitřní tlak dle teorie energetické je:
𝑝𝑝𝐷𝐷𝑐𝑐𝑑𝑑𝑐𝑐𝑜𝑜𝑒𝑒. ≤
𝜎𝜎𝐷𝐷 ∙ 𝑑𝑑0,866 ∙ 𝑅𝑅
=175 ∙ 30
0,866 ∙ 14002
= 8,66 MPa
46
Hlavní napětí podle teorie energetické budou:
𝜎𝜎𝑒𝑒𝑐𝑐𝑑𝑑𝑐𝑐𝑜𝑜𝑒𝑒. =
8,66 ∙ 70030
= 202 N ∙ mm−2 a 𝜎𝜎𝑑𝑑𝑐𝑐𝑑𝑑𝑐𝑐𝑜𝑜𝑒𝑒. =
8,66 ∙ 7002 ∙ 30
= 101 N ∙ mm−2.
Obě deformace (poloměru a tloušťky stěny) určíme pomocí rozšířeného Hookova zákona, který se v tomto případě velmi zjednoduší (σ3 = σr ≈ 0):
∆𝐷𝐷𝑐𝑐𝑑𝑑𝑐𝑐𝑜𝑜𝑒𝑒. =𝐷𝐷𝐸𝐸
∙ 𝜎𝜎𝑒𝑒𝑐𝑐𝑑𝑑𝑐𝑐𝑜𝑜𝑒𝑒. ∙ �1 −
𝜈𝜈2
� =1400
2 ∙ 105 ∙ 202 ∙ �1 −0,32
� = 1,202 mm
∆𝑑𝑑𝑐𝑐𝑑𝑑𝑐𝑐𝑜𝑜𝑒𝑒. =𝑑𝑑𝐸𝐸
∙ 𝜎𝜎𝑒𝑒𝑐𝑐𝑑𝑑𝑐𝑐𝑜𝑜𝑒𝑒. ∙ �−
3 ∙ 𝜈𝜈2
� =30
2 ∙ 105 ∙ 202 ∙ �−3 ∙ 0,3
2� = −0,0136 mm
Deformační energie akumulovaná v jednom metru válcového plynového potrubí bude pro pD:
𝑈𝑈 = � 𝜆𝜆 ∙ 𝑑𝑑𝑉𝑉
(𝑉𝑉)
𝜆𝜆=𝑐𝑐𝑑𝑑𝑑𝑑𝑘𝑘𝑒𝑒.������� 𝜆𝜆 ∙ 𝑉𝑉 = 𝜆𝜆 ∙ 𝑆𝑆 ∙ 𝑑𝑑
kde: λ … hustota deformační energie pro dvojosou napjatost (σt = 2·σo)
𝜆𝜆 =𝜎𝜎𝑒𝑒
2
𝐸𝐸∙ �
58
−𝜈𝜈2
� =2022
2 ∙ 105 ∙ �58
−0,32
� = 0,097 N ∙ mm−2
Velikost celkové deformační energie akumulované v plášti kulového zásobníku pro dovolený tlak stanovený pomocí teorie energetické je:
𝑈𝑈(ℓ=1) = 0,097 ∙ 131 944 800 = 12 798 646 N ∙ mm ≈ 12,8 kN ∙ m

Pružnost a pevnost II ZS 2018/2019
47
PŘÍKLAD 3.4 (TENKOSTĚNNÁ VÁLCOVÁ NÁDOBA):
Dáno: p ; R ; s ; E a v.
Určit: a) pro otevřenou nádobu σ1 a σ2 (hlavní napětí v plášti nádoby) ∆R a ∆s (změny hlavních rozměrů)
b) pro uzavřenou nádobu σ1 a σ2 (hlavní napětí v plášti nádoby) ∆R a ∆s (změny hlavních rozměrů)
Řešení: Základem řešení obou případů je Laplaceova rovnice, pro kterou musí platit:
R1 = R a R2 → ∞ (σ3 ≈ 0).
Dosazením do Laplaceovy rovnice dostáváme:
sp
R=
∞+ 21 σσ odkud vychází v obou případech první hlavní napětí:
sRp ⋅
=1σ .
Druhé hlavní napětí bude v případě otevřeného válce (př. a) nulové: 02 =σ (ve stěně otevřené válcové nádoby tak vzniká pouze jednoosá napjatost).
V případě uzavřené válcové nádoby (př. b) vypočteme druhé hlavní napětí σ2 z podmínky silové rovnováhy do osového směru:
22 ππ2 RpFsR p ⋅⋅==⋅⋅⋅⋅σ a odtud již dostáváme:
sRp
⋅⋅
=22σ .
(ve stěně uzavřené válcové nádoby vzniká rovinná napjatost, kdy první hlavní napětí je dvakrát větší než druhé: σ1 = 2⋅σ2).
Pro výpočet změn hlavních rozměrů nádoby použijeme rozšířený Hookův zákon pro jednoosou resp. rovinnou napjatost:
a) otevřená nádoba:
∆𝑅𝑅(𝑂𝑂.𝐾𝐾.) = 𝑅𝑅 ∙ 𝜀𝜀𝑒𝑒 =𝑅𝑅𝐸𝐸
∙ 𝜎𝜎𝑒𝑒 =𝑝𝑝 ∙ 𝑅𝑅2
𝐸𝐸 ∙ 𝑑𝑑 a ∆𝑑𝑑(𝑂𝑂.𝐾𝐾.) = 𝑑𝑑 ∙ 𝜀𝜀𝑜𝑜 =
𝑑𝑑𝐸𝐸
∙ (−𝑣𝑣 ∙ 𝜎𝜎𝑒𝑒) = −𝑣𝑣 ∙𝑝𝑝 ∙ 𝑅𝑅
𝐸𝐸.
b)uzavřená nádoba:
∆𝑅𝑅(𝑈𝑈.𝐾𝐾.) = 𝑅𝑅 ∙ 𝜀𝜀𝑒𝑒 =𝑅𝑅𝐸𝐸
∙ (𝜎𝜎𝑒𝑒 − 𝑣𝑣 ∙ 𝜎𝜎𝑑𝑑) =𝑝𝑝 ∙ 𝑅𝑅2
𝐸𝐸 ∙ 𝑑𝑑∙ �1 −
𝑣𝑣2
�,
∆𝑑𝑑(𝑂𝑂.𝐾𝐾.) = 𝑑𝑑 ∙ 𝜀𝜀𝑜𝑜 =𝑑𝑑𝐸𝐸
∙ [−𝑣𝑣 ∙ (𝜎𝜎𝑒𝑒 + 𝜎𝜎𝑑𝑑)] = −𝑣𝑣 ∙32
∙𝑝𝑝 ∙ 𝑅𝑅
𝐸𝐸.
Poznámka: Pro Poissonovo číslo v = 0,3 vychází: Změna poloměru uzavřené nádoby je o 15% menší než u nádoby uzavřené: ∆Ruz. ≈ 0,85⋅∆Rot.. Stěna uzavřené nádoby se zeslabí o 50% více než stěna otevřené nádoby: ∆suz. ≈ 1,5⋅∆sot..
R
s
2
1
3
σ1
σ1
2
1
3
σ2 σ2
σ1
σ1
p Fp R s σ2
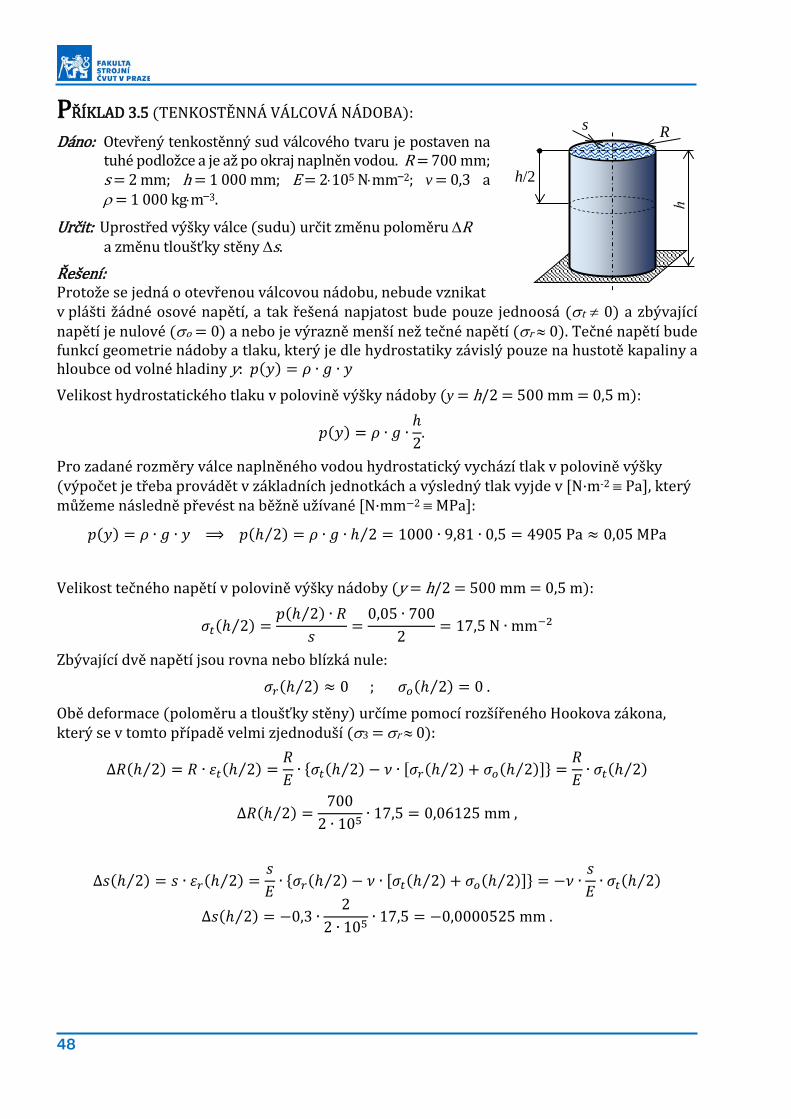
48
PŘÍKLAD 3.5 (TENKOSTĚNNÁ VÁLCOVÁ NÁDOBA):
Dáno: Otevřený tenkostěnný sud válcového tvaru je postaven na tuhé podložce a je až po okraj naplněn vodou. R = 700 mm; s = 2 mm; h = 1 000 mm; E = 2⋅105 N⋅mm−2; v = 0,3 a ρ = 1 000 kg⋅m−3.
Určit: Uprostřed výšky válce (sudu) určit změnu poloměru ∆R a změnu tloušťky stěny ∆s.
Řešení: Protože se jedná o otevřenou válcovou nádobu, nebude vznikat v plášti žádné osové napětí, a tak řešená napjatost bude pouze jednoosá (σt ≠ 0) a zbývající napětí je nulové (σo = 0) a nebo je výrazně menší než tečné napětí (σr ≈ 0). Tečné napětí bude funkcí geometrie nádoby a tlaku, který je dle hydrostatiky závislý pouze na hustotě kapaliny a hloubce od volné hladiny y: 𝑝𝑝(𝑦𝑦) = 𝜌𝜌 ∙ 𝑔𝑔 ∙ 𝑦𝑦 Velikost hydrostatického tlaku v polovině výšky nádoby (y = h/2 = 500 mm = 0,5 m):
𝑝𝑝(𝑦𝑦) = 𝜌𝜌 ∙ 𝑔𝑔 ∙ℎ2
.
Pro zadané rozměry válce naplněného vodou hydrostatický vychází tlak v polovině výšky (výpočet je třeba provádět v základních jednotkách a výsledný tlak vyjde v [N·m-2 ≡ Pa], který můžeme následně převést na běžně užívané [N·mm−2 ≡ MPa]:
𝑝𝑝(𝑦𝑦) = 𝜌𝜌 ∙ 𝑔𝑔 ∙ 𝑦𝑦 ⟹ 𝑝𝑝(ℎ 2⁄ ) = 𝜌𝜌 ∙ 𝑔𝑔 ∙ ℎ 2⁄ = 1000 ∙ 9,81 ∙ 0,5 = 4905 Pa ≈ 0,05 MPa Velikost tečného napětí v polovině výšky nádoby (y = h/2 = 500 mm = 0,5 m):
𝜎𝜎𝑒𝑒(ℎ 2⁄ ) =𝑝𝑝(ℎ 2⁄ ) ∙ 𝑅𝑅
𝑑𝑑=
0,05 ∙ 7002
= 17,5 N ∙ mm−2
Zbývající dvě napětí jsou rovna nebo blízká nule:
𝜎𝜎𝑜𝑜(ℎ 2⁄ ) ≈ 0 ; 𝜎𝜎𝑑𝑑(ℎ 2⁄ ) = 0 .
Obě deformace (poloměru a tloušťky stěny) určíme pomocí rozšířeného Hookova zákona, který se v tomto případě velmi zjednoduší (σ3 = σr ≈ 0):
∆𝑅𝑅(ℎ 2⁄ ) = 𝑅𝑅 ∙ 𝜀𝜀𝑒𝑒(ℎ 2⁄ ) =𝑅𝑅𝐸𝐸
∙ {𝜎𝜎𝑒𝑒(ℎ 2⁄ ) − 𝜈𝜈 ∙ [𝜎𝜎𝑜𝑜(ℎ 2⁄ ) + 𝜎𝜎𝑑𝑑(ℎ 2⁄ )]} =𝑅𝑅𝐸𝐸
∙ 𝜎𝜎𝑒𝑒(ℎ 2⁄ )
∆𝑅𝑅(ℎ 2⁄ ) =700
2 ∙ 105 ∙ 17,5 = 0,06125 mm ,
∆𝑑𝑑(ℎ 2⁄ ) = 𝑑𝑑 ∙ 𝜀𝜀𝑜𝑜(ℎ 2⁄ ) =𝑑𝑑𝐸𝐸
∙ {𝜎𝜎𝑜𝑜(ℎ 2⁄ ) − 𝜈𝜈 ∙ [𝜎𝜎𝑒𝑒(ℎ 2⁄ ) + 𝜎𝜎𝑑𝑑(ℎ 2⁄ )]} = −𝜈𝜈 ∙𝑑𝑑𝐸𝐸
∙ 𝜎𝜎𝑒𝑒(ℎ 2⁄ )
∆𝑑𝑑(ℎ 2⁄ ) = −0,3 ∙2
2 ∙ 105 ∙ 17,5 = −0,0000525 mm .
R s
h/2

Pružnost a pevnost II ZS 2018/2019
49
PŘÍKLAD 3.6 (TENKOSTĚNNÁ VÁLCOVÁ NÁDOBA):
Dáno: Válcová nádoba o průměru D a tloušťce stěny s je uzavřená tuhým víkem, na které působí svislá síla F. D = 200 mm; s = 3 mm a F = 1⋅105 N.
Určit: Velikost vnitřního talku p tak, aby ve stěně válce vznikla napjatost čistého smyku (σ1 = −σ3 a σ2 = 0).
Řešení: Napjatost v „uzavřené“ válcové nádobě je v důsledku působení pouze vnitřního přetlaku p podle Laplaceovy teorie rovinná, kdy je jedno hlavní napětí dvojnásobně větší než druhé (σt = 2·σo ≠ 0) a třetí hlavní napětí neuvažujeme, protože je výrazně nižší (σr ≈ 0):
𝜎𝜎𝑒𝑒(𝑝𝑝) =𝑝𝑝 ∙ 𝑅𝑅
𝑑𝑑 ; 𝜎𝜎𝑑𝑑(𝑝𝑝) =
𝑝𝑝 ∙ 𝑅𝑅2 ∙ 𝑑𝑑
a 𝜎𝜎𝑜𝑜(𝑝𝑝) ≈ 0.
V případě působení pouze osové tlakové síly F vzniká v plášti nádoby jednoosá tlaková napjatost:
𝜎𝜎𝑒𝑒(𝐹𝐹) = 0 ; 𝜎𝜎𝑑𝑑(𝐹𝐹) = −𝐹𝐹𝐴𝐴
= −𝐹𝐹
2 ∙ 𝜋𝜋 ∙ 𝑅𝑅 ∙ 𝑑𝑑 a 𝜎𝜎𝑜𝑜(𝐹𝐹) = 0.
Po superpozici obou účinků vznikne rovinná napjatost se složkami:
𝜎𝜎𝑒𝑒(𝑝𝑝 + 𝐹𝐹) =𝑝𝑝 ∙ 𝑅𝑅
𝑑𝑑+ 0 ; 𝜎𝜎𝑑𝑑(𝑝𝑝 + 𝐹𝐹) =
𝑝𝑝 ∙ 𝑅𝑅2 ∙ 𝑑𝑑
−𝐹𝐹
2 ∙ 𝜋𝜋 ∙ 𝑅𝑅 ∙ 𝑑𝑑 a 𝜎𝜎𝑜𝑜(𝑝𝑝 + 𝐹𝐹) = 0 + 0.
Napjatost čistého smyku je definována podmínkou σmax = − σmin. Protože tlakový síla F ovlivňuje pouze osové napětí, bude maximálním napětím tečné napětí vyvolané pouze vnitřním přetlakem p a minimálním bude osové napětí jako superpozice napětí od tlaku p a tlakové osové síly F:
𝜎𝜎𝑚𝑚𝑚𝑚𝑚𝑚 = 𝜎𝜎𝑒𝑒(𝑝𝑝 + 𝐹𝐹) =𝑝𝑝 ∙ 𝑅𝑅
𝑑𝑑 a 𝜎𝜎𝑚𝑚𝑖𝑖𝑑𝑑 = 𝜎𝜎𝑑𝑑(𝑝𝑝 + 𝐹𝐹) =
𝑝𝑝 ∙ 𝑅𝑅2 ∙ 𝑑𝑑
−𝐹𝐹
2 ∙ 𝜋𝜋 ∙ 𝑅𝑅 ∙ 𝑑𝑑.
Podmínka vzniku napjatosti čistého smyku ve stěně řešené válcové nádoby je: 𝑝𝑝 ∙ 𝑅𝑅
𝑑𝑑= − �
𝑝𝑝 ∙ 𝑅𝑅2 ∙ 𝑑𝑑
−𝐹𝐹
2 ∙ 𝜋𝜋 ∙ 𝑅𝑅 ∙ 𝑑𝑑�.
Hledaný vnitřní tlak pro vznik napjatosti čistý smyk ve stěně nádoby bude: 32
∙𝑝𝑝 ∙ 𝑅𝑅
𝑑𝑑=
𝐹𝐹2 ∙ 𝜋𝜋 ∙ 𝑅𝑅 ∙ 𝑑𝑑
.
Pro zadané hodnoty bude hledaný tlak:
𝑝𝑝 =13
.𝐹𝐹
𝜋𝜋 ∙ 𝑅𝑅2 =13
.1 ∙ 105
𝜋𝜋 ∙ �2002 �
2 = 1,06 MPa.
∅D
s
F
p = ? σ1
p
σ1
σ3
σ3
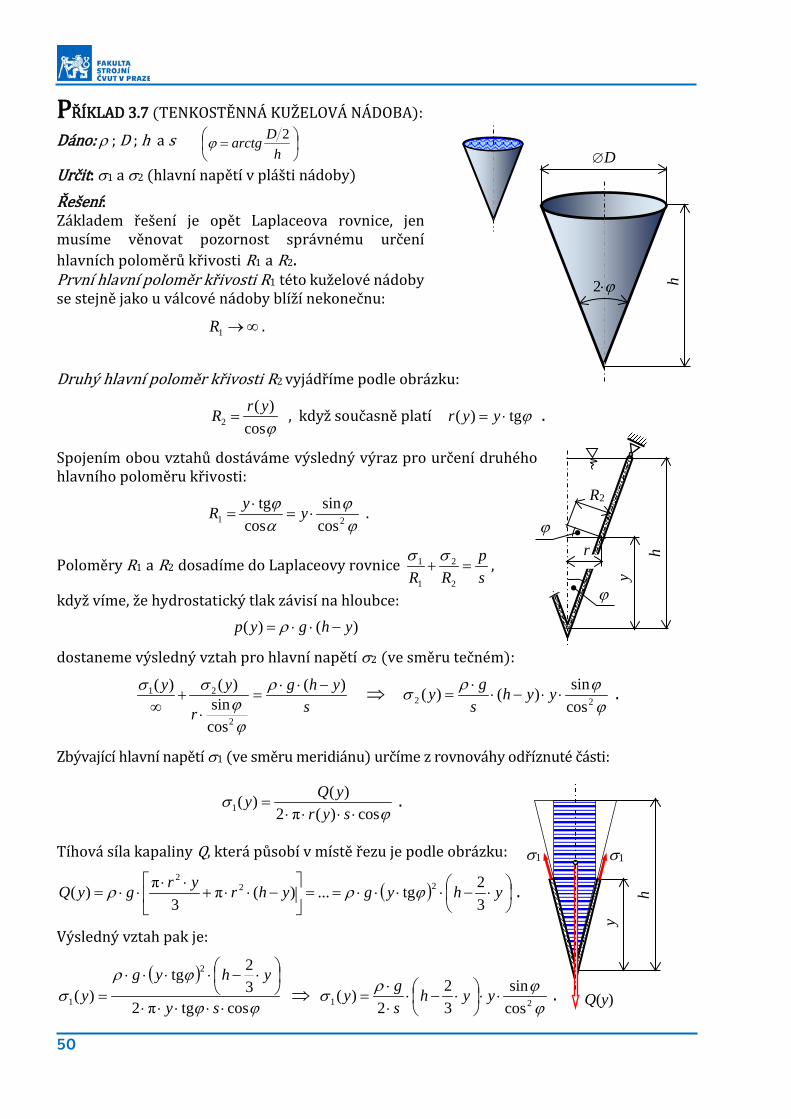
50
PŘÍKLAD 3.7 (TENKOSTĚNNÁ KUŽELOVÁ NÁDOBA):
Dáno: ρ ; D ; h a s
=
hDarctg 2ϕ
Určit: σ1 a σ2 (hlavní napětí v plášti nádoby)
Řešení: Základem řešení je opět Laplaceova rovnice, jen musíme věnovat pozornost správnému určení hlavních poloměrů křivosti R1 a R2. První hlavní poloměr křivosti R1 této kuželové nádoby se stejně jako u válcové nádoby blíží nekonečnu:
∞→1R .
Druhý hlavní poloměr křivosti R2 vyjádříme podle obrázku:
ϕcos)(
2yrR = , když současně platí ϕtg)( ⋅= yyr .
Spojením obou vztahů dostáváme výsledný výraz pro určení druhého hlavního poloměru křivosti:
ϕϕ
αϕ
21 cossin
costg
⋅=⋅
= yyR .
Poloměry R1 a R2 dosadíme do Laplaceovy rovnice sp
RR=+
2
2
1
1 σσ ,
když víme, že hydrostatický tlak závisí na hloubce: )()( yhgyp −⋅⋅= ρ
dostaneme výsledný vztah pro hlavní napětí σ2 (ve směru tečném):
syhg
r
yy )(
cossin
)()(
2
21 −⋅⋅=
⋅+
∞ρ
ϕϕ
σσ ⇒ ϕ
ϕρσ 22 cossin)()( ⋅⋅−⋅
⋅= yyh
sgy .
Zbývající hlavní napětí σ1 (ve směru meridiánu) určíme z rovnováhy odříznuté části:
ϕσ
cos)(π2)()(1 ⋅⋅⋅⋅
=syr
yQy .
Tíhová síla kapaliny Q, která působí v místě řezu je podle obrázku:
( )
⋅−⋅⋅⋅⋅==
−⋅⋅+
⋅⋅⋅⋅= yhygyhryrgyQ
32tg...)(π
3π)( 22
2
ϕρρ .
Výsledný vztah pak je:
( )
ϕϕ
ϕρσ
costgπ232tg
)(
2
1 ⋅⋅⋅⋅⋅
⋅−⋅⋅⋅⋅
=sy
yhygy ⇒
ϕϕρσ 21 cos
sin32
2)( ⋅⋅
⋅−⋅
⋅⋅
= yyhsgy .
∅D
h 2⋅ϕ
h
y
Q(y)
σ1 σ1
R2
h r
ϕ
y
ϕ
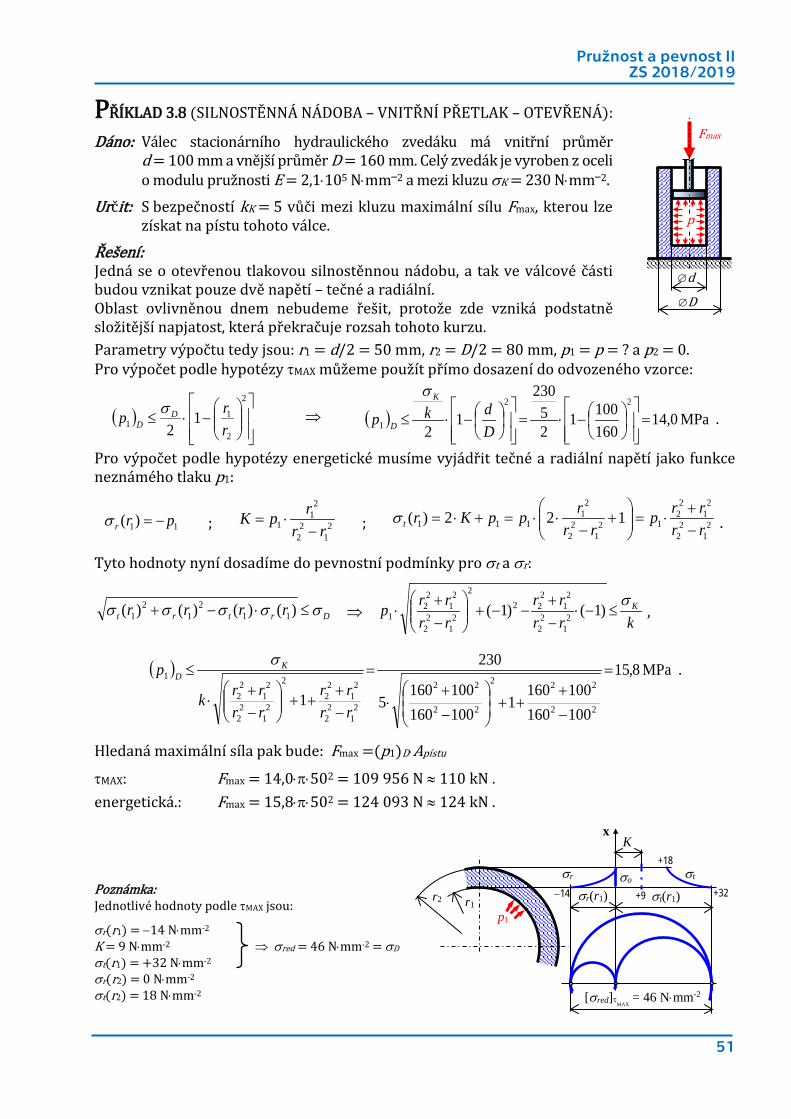
Pružnost a pevnost II ZS 2018/2019
51
σr(r1) r1 r2 σt(r1)
K
[σred]τMAX
= 46 N⋅mm-2
x
σt σr +32
+18
+9 −14
p1
σo
PŘÍKLAD 3.8 (SILNOSTĚNNÁ NÁDOBA – VNITŘNÍ PŘETLAK – OTEVŘENÁ):
Dáno: Válec stacionárního hydraulického zvedáku má vnitřní průměr d = 100 mm a vnější průměr D = 160 mm. Celý zvedák je vyroben z oceli o modulu pružnosti E = 2,1⋅105 N⋅mm−2 a mezi kluzu σK = 230 N⋅mm−2.
Určit: S bezpečností kK = 5 vůči mezi kluzu maximální sílu Fmax, kterou lze získat na pístu tohoto válce.
Řešení: Jedná se o otevřenou tlakovou silnostěnnou nádobu, a tak ve válcové části budou vznikat pouze dvě napětí – tečné a radiální. Oblast ovlivněnou dnem nebudeme řešit, protože zde vzniká podstatně složitější napjatost, která překračuje rozsah tohoto kurzu. Parametry výpočtu tedy jsou: r1 = d/2 = 50 mm, r2 = D/2 = 80 mm, p1 = p = ? a p2 = 0. Pro výpočet podle hypotézy τMAX můžeme použít přímo dosazení do odvozeného vzorce:
( )
−⋅≤
2
2
11 1
2 rrp D
Dσ
⇒
( ) MPa0,14
1601001
25
230
12
22
1 =
−⋅=
−⋅≤
Ddkp
K
D
σ
.
Pro výpočet podle hypotézy energetické musíme vyjádřit tečné a radiální napětí jako funkce neznámého tlaku p1:
11)( prr −=σ
; 21
22
21
1 rrrpK−
⋅=
;
21
22
21
22
121
22
21
111 122)(rrrrp
rrrppKrt −
+⋅=
+
−⋅⋅=+⋅=σ
.
Tyto hodnoty nyní dosadíme do pevnostní podmínky pro σt a σr:
Drtrt rrrr σσσσσ ≤⋅−+ )()()()( 112
12
1
⇒
krrrr
rrrrp Kσ
≤−⋅−+
−−+
−+
⋅ )1()1( 21
22
21
222
2
21
22
21
22
1
,
( ) MPa8,15
100160100160
1100160100160
5
230
122
222
22
22
21
22
21
22
2
21
22
21
22
1 =
−
+++
−
+⋅
=
−+
++
−+
⋅
≤
rrrr
rrrrk
p KD
σ .
Hledaná maximální síla pak bude: Fmax =(p1)D⋅Apístu
τMAX: Fmax = 14,0⋅π⋅502 = 109 956 N ≈ 110 kN . energetická.: Fmax = 15,8⋅π⋅502 = 124 093 N ≈ 124 kN .
Poznámka: Jednotlivé hodnoty podle τMAX jsou:
σr(r1) = −14 N⋅mm-2 K = 9 N⋅mm-2 ⇒ σred = 46 N⋅mm-2 = σD
σt(r1) = +32 N⋅mm-2 σr(r2) = 0 N⋅mm-2 σt(r2) = 18 N⋅mm-2
p
Fmax
∅d
∅D
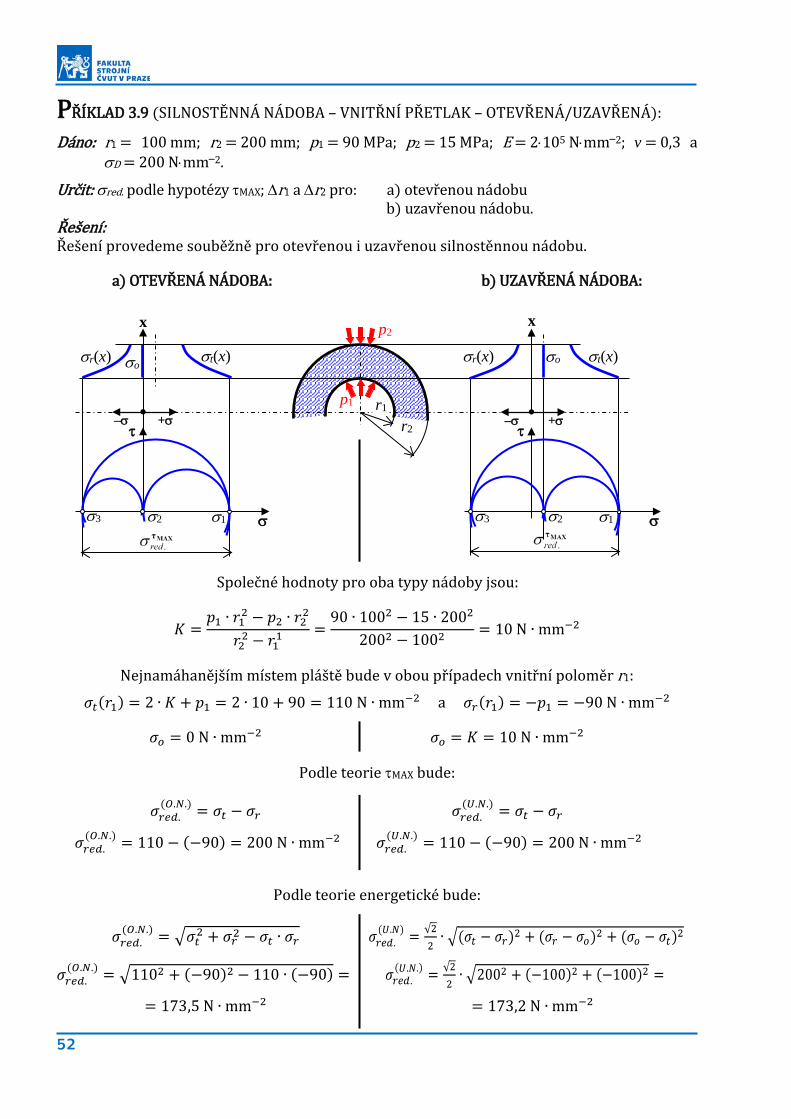
52
PŘÍKLAD 3.9 (SILNOSTĚNNÁ NÁDOBA – VNITŘNÍ PŘETLAK – OTEVŘENÁ/UZAVŘENÁ):
Dáno: r1 = 100 mm; r2 = 200 mm; p1 = 90 MPa; p2 = 15 MPa; E = 2⋅105 N⋅mm−2; v = 0,3 a σD = 200 N⋅mm−2.
Určit: σred. podle hypotézy τMAX; ∆r1 a ∆r2 pro: a) otevřenou nádobu b) uzavřenou nádobu.
Řešení: Řešení provedeme souběžně pro otevřenou i uzavřenou silnostěnnou nádobu.
a) OTEVŘENÁ NÁDOBA: b) UZAVŘENÁ NÁDOBA:
Společné hodnoty pro oba typy nádoby jsou:
𝐾𝐾 =𝑝𝑝1 ∙ 𝑟𝑟1
2 − 𝑝𝑝2 ∙ 𝑟𝑟22
𝑟𝑟22 − 𝑟𝑟1
1 =90 ∙ 1002 − 15 ∙ 2002
2002 − 1002 = 10 N ∙ mm−2
Nejnamáhanějším místem pláště bude v obou případech vnitřní poloměr r1:
𝜎𝜎𝑒𝑒(𝑟𝑟1) = 2 ∙ 𝐾𝐾 + 𝑝𝑝1 = 2 ∙ 10 + 90 = 110 N ∙ mm−2 a 𝜎𝜎𝑜𝑜(𝑟𝑟1) = −𝑝𝑝1 = −90 N ∙ mm−2
𝜎𝜎𝑑𝑑 = 0 N ∙ mm−2 𝜎𝜎𝑑𝑑 = 𝐾𝐾 = 10 N ∙ mm−2
Podle teorie τMAX bude:
𝜎𝜎𝑜𝑜𝑐𝑐𝑑𝑑.(𝑂𝑂.𝐾𝐾.) = 𝜎𝜎𝑒𝑒 − 𝜎𝜎𝑜𝑜 𝜎𝜎𝑜𝑜𝑐𝑐𝑑𝑑.
(𝑈𝑈.𝐾𝐾.) = 𝜎𝜎𝑒𝑒 − 𝜎𝜎𝑜𝑜
𝜎𝜎𝑜𝑜𝑐𝑐𝑑𝑑.(𝑂𝑂.𝐾𝐾.) = 110 − (−90) = 200 N ∙ mm−2 𝜎𝜎𝑜𝑜𝑐𝑐𝑑𝑑.
(𝑈𝑈.𝐾𝐾.) = 110 − (−90) = 200 N ∙ mm−2
Podle teorie energetické bude:
𝜎𝜎𝑜𝑜𝑐𝑐𝑑𝑑.(𝑂𝑂.𝐾𝐾.) = �𝜎𝜎𝑒𝑒
2 + 𝜎𝜎𝑜𝑜2 − 𝜎𝜎𝑒𝑒 ∙ 𝜎𝜎𝑜𝑜 𝜎𝜎𝑜𝑜𝑐𝑐𝑑𝑑.
(𝑈𝑈.𝐾𝐾) = √22
∙ �(𝜎𝜎𝑒𝑒 − 𝜎𝜎𝑜𝑜)2 + (𝜎𝜎𝑜𝑜 − 𝜎𝜎𝑑𝑑)2 + (𝜎𝜎𝑑𝑑 − 𝜎𝜎𝑒𝑒)2
𝜎𝜎𝑜𝑜𝑐𝑐𝑑𝑑.(𝑂𝑂.𝐾𝐾.) = �1102 + (−90)2 − 110 ∙ (−90) = 𝜎𝜎𝑜𝑜𝑐𝑐𝑑𝑑.
(𝑈𝑈.𝐾𝐾.) = √22
∙ �2002 + (−100)2 + (−100)2 =
= 173,5 N ∙ mm−2 = 173,2 N ∙ mm−2
r2 –σ +σ
σt(x) σr(x) σo σt(x) σr(x) σo
x
σ1
x
σ2 σ3 σ1 σ2 σ3 σ
τ
σ
τ –σ +σ
r1
p2
p1

Pružnost a pevnost II ZS 2018/2019
53
Z výsledků je patrné, že podle teorie τMAX vychází redukované napětí stejné pro otevřenou i uzavřenou nádobu (osové napětí, kterým se od sebe nádoby liší, se ve výpočtech neobjevuje). Při použití teorie energetické existuje rozdíl mezi otevřenou a uzavřenou nádobou, protože do výpočtu vstupuje i osové napětí (rozdíl v tomto případě je malý, protože je malá hodnota osového napětí).
Výpočet deformace pláště nádoby:
∆𝑟𝑟1 =𝑟𝑟1
𝐸𝐸∙ {𝜎𝜎𝑒𝑒(𝑟𝑟1) − 𝜈𝜈 ∙ [𝜎𝜎𝑜𝑜(𝑟𝑟1) + 𝜎𝜎𝑑𝑑]}
∆𝑟𝑟1 =𝑟𝑟1
𝐸𝐸∙ {𝜎𝜎𝑒𝑒(𝑟𝑟1) − 𝜈𝜈 ∙ [𝜎𝜎𝑜𝑜(𝑟𝑟1)]} ∆𝑟𝑟1 =
𝑟𝑟1
𝐸𝐸∙ {𝜎𝜎𝑒𝑒(𝑟𝑟1) − 𝜈𝜈 ∙ [𝜎𝜎𝑜𝑜(𝑟𝑟1) + 𝜎𝜎𝑑𝑑]}
∆𝑟𝑟1 =100
2 ∙ 105 ∙ {110 − 0,3 ∙ [−90]} ∆𝑟𝑟1 =100
2 ∙ 105 ∙ {110 − 0,3 ∙ [−90 + 10]}
= 0,0685 mm = 0,0670 mm
∆𝑟𝑟2 =𝑟𝑟2
𝐸𝐸∙ {𝜎𝜎𝑒𝑒(𝑟𝑟2) − 𝜈𝜈 ∙ [𝜎𝜎𝑜𝑜(𝑟𝑟2) + 𝜎𝜎𝑑𝑑]}
𝜎𝜎𝑒𝑒(𝑟𝑟2) = 2 ∙ 𝐾𝐾 + 𝑝𝑝2 = 2 ∙ 10 + 15 = 35 N ∙ mm−2 a 𝜎𝜎𝑜𝑜(𝑟𝑟2) = −𝑝𝑝2 = −15 N ∙ mm−2
∆𝑟𝑟2 =𝑟𝑟2
𝐸𝐸∙ {𝜎𝜎𝑒𝑒(𝑟𝑟2) − 𝜈𝜈 ∙ [𝜎𝜎𝑜𝑜(𝑟𝑟2)]} ∆𝑟𝑟2 =
𝑟𝑟1
𝐸𝐸∙ {𝜎𝜎𝑒𝑒(𝑟𝑟2) − 𝜈𝜈 ∙ [𝜎𝜎𝑜𝑜(𝑟𝑟2) + 𝜎𝜎𝑑𝑑]}
∆𝑟𝑟2 =200
2 ∙ 105 ∙ {35 − 0,3 ∙ [−15]} ∆𝑟𝑟2 =200
2 ∙ 105 ∙ {35 − 0,3 ∙ [−15 + 10]}
= 0,0395 mm = 0,0365 mm
Nová tloušťka stěny po zatížení bude:
𝐾𝐾∗ = 𝐾𝐾 + ∆𝑟𝑟2 − ∆𝑟𝑟1 𝐾𝐾∗ = 100 + 0,0395 − 0,0685 = 99,971 mm 𝐾𝐾∗ = 100 + 0,0365 − 0,0670 = 99,969 mm
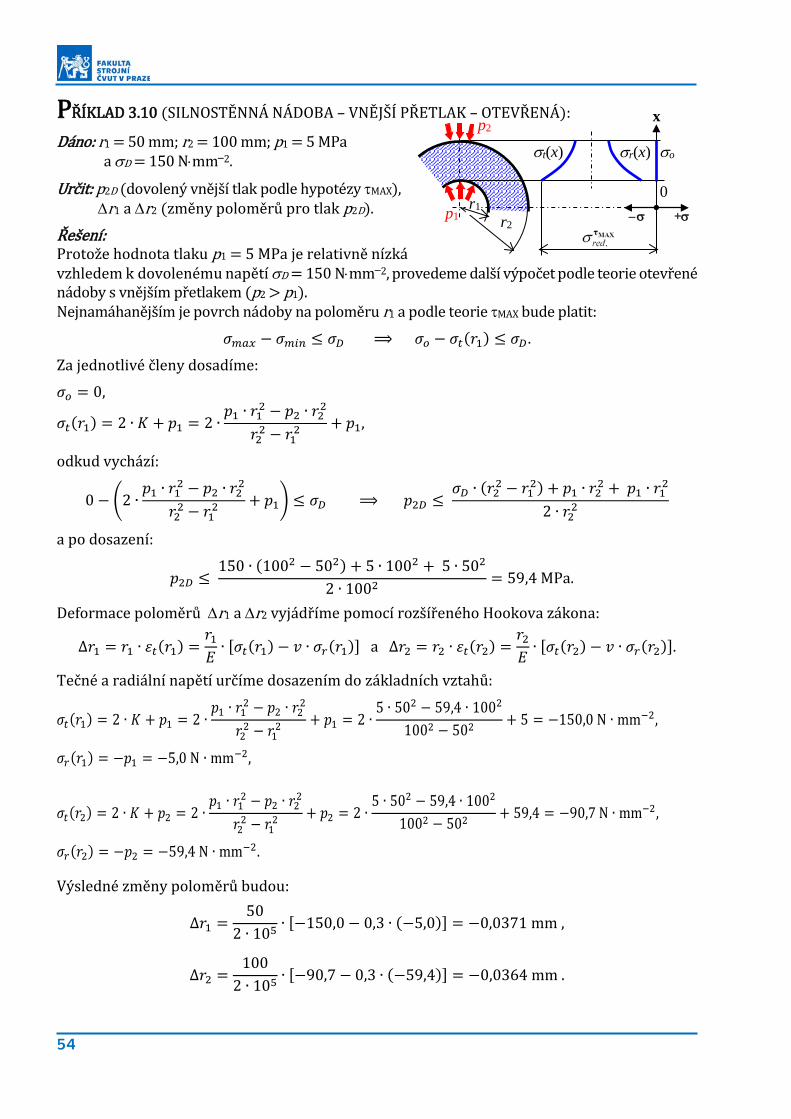
54
PŘÍKLAD 3.10 (SILNOSTĚNNÁ NÁDOBA – VNĚJŠÍ PŘETLAK – OTEVŘENÁ):
Dáno: r1 = 50 mm; r2 = 100 mm; p1 = 5 MPa a σD = 150 N⋅mm−2.
Určit: p2D (dovolený vnější tlak podle hypotézy τMAX), ∆r1 a ∆r2 (změny poloměrů pro tlak p2D).
Řešení: Protože hodnota tlaku p1 = 5 MPa je relativně nízká vzhledem k dovolenému napětí σD = 150 N⋅mm−2, provedeme další výpočet podle teorie otevřené nádoby s vnějším přetlakem (p2 > p1). Nejnamáhanějším je povrch nádoby na poloměru r1 a podle teorie τMAX bude platit:
𝜎𝜎𝑚𝑚𝑚𝑚𝑚𝑚 − 𝜎𝜎𝑚𝑚𝑖𝑖𝑑𝑑 ≤ 𝜎𝜎𝐷𝐷 ⟹ 𝜎𝜎𝑑𝑑 − 𝜎𝜎𝑒𝑒(𝑟𝑟1) ≤ 𝜎𝜎𝐷𝐷 .
Za jednotlivé členy dosadíme:
𝜎𝜎𝑑𝑑 = 0,
𝜎𝜎𝑒𝑒(𝑟𝑟1) = 2 ∙ 𝐾𝐾 + 𝑝𝑝1 = 2 ∙𝑝𝑝1 ∙ 𝑟𝑟1
2 − 𝑝𝑝2 ∙ 𝑟𝑟22
𝑟𝑟22 − 𝑟𝑟1
2 + 𝑝𝑝1,
odkud vychází:
0 − �2 ∙𝑝𝑝1 ∙ 𝑟𝑟1
2 − 𝑝𝑝2 ∙ 𝑟𝑟22
𝑟𝑟22 − 𝑟𝑟1
2 + 𝑝𝑝1� ≤ 𝜎𝜎𝐷𝐷 ⟹ 𝑝𝑝2𝐷𝐷 ≤ 𝜎𝜎𝐷𝐷 ∙ (𝑟𝑟2
2 − 𝑟𝑟12) + 𝑝𝑝1 ∙ 𝑟𝑟2
2 + 𝑝𝑝1 ∙ 𝑟𝑟12
2 ∙ 𝑟𝑟22
a po dosazení:
𝑝𝑝2𝐷𝐷 ≤ 150 ∙ (1002 − 502) + 5 ∙ 1002 + 5 ∙ 502
2 ∙ 1002 = 59,4 MPa.
Deformace poloměrů ∆r1 a ∆r2 vyjádříme pomocí rozšířeného Hookova zákona:
∆𝑟𝑟1 = 𝑟𝑟1 ∙ 𝜀𝜀𝑒𝑒(𝑟𝑟1) =𝑟𝑟1
𝐸𝐸∙ [𝜎𝜎𝑒𝑒(𝑟𝑟1) − 𝑣𝑣 ∙ 𝜎𝜎𝑜𝑜(𝑟𝑟1)] a ∆𝑟𝑟2 = 𝑟𝑟2 ∙ 𝜀𝜀𝑒𝑒(𝑟𝑟2) =
𝑟𝑟2
𝐸𝐸∙ [𝜎𝜎𝑒𝑒(𝑟𝑟2) − 𝑣𝑣 ∙ 𝜎𝜎𝑜𝑜(𝑟𝑟2)].
Tečné a radiální napětí určíme dosazením do základních vztahů:
𝜎𝜎𝑒𝑒(𝑟𝑟1) = 2 ∙ 𝐾𝐾 + 𝑝𝑝1 = 2 ∙𝑝𝑝1 ∙ 𝑟𝑟1
2 − 𝑝𝑝2 ∙ 𝑟𝑟22
𝑟𝑟22 − 𝑟𝑟1
2 + 𝑝𝑝1 = 2 ∙5 ∙ 502 − 59,4 ∙ 1002
1002 − 502 + 5 = −150,0 N ∙ mm−2,
𝜎𝜎𝑜𝑜(𝑟𝑟1) = −𝑝𝑝1 = −5,0 N ∙ mm−2,
𝜎𝜎𝑒𝑒(𝑟𝑟2) = 2 ∙ 𝐾𝐾 + 𝑝𝑝2 = 2 ∙𝑝𝑝1 ∙ 𝑟𝑟1
2 − 𝑝𝑝2 ∙ 𝑟𝑟22
𝑟𝑟22 − 𝑟𝑟1
2 + 𝑝𝑝2 = 2 ∙5 ∙ 502 − 59,4 ∙ 1002
1002 − 502 + 59,4 = −90,7 N ∙ mm−2,
𝜎𝜎𝑜𝑜(𝑟𝑟2) = −𝑝𝑝2 = −59,4 N ∙ mm−2.
Výsledné změny poloměrů budou:
∆𝑟𝑟1 =50
2 ∙ 105 ∙ [−150,0 − 0,3 ∙ (−5,0)] = −0,0371 mm ,
∆𝑟𝑟2 =100
2 ∙ 105 ∙ [−90,7 − 0,3 ∙ (−59,4)] = −0,0364 mm .
r2
σt(x) σr(x) σo
x
– σ +σ r1
p2
p1
0

Pružnost a pevnost II ZS 2018/2019
55
PŘÍKLAD 3.11 (SILNOSTĚNNÁ NÁDOBA – VNITŘNÍ PŘETLAK – UZAVŘENÁ):
Dáno: r1 = 251 mm; r2 = 355 mm; p2 = 0 a σD = 160 N⋅mm−2.
Určit: p1D (dovolený tlak podle hypotézy τMAX), ∆r1 a ∆r2 (změny poloměrů pro tlak p1D).
Řešení: Protože hodnota tlaku p2 = 0 MPa bude se jednat o nádobu s vnitřním přetlakem (p1 > p2). Nejnamáhanějším je povrch nádoby na poloměru r1 a podle teorie τMAX bude platit:
𝜎𝜎𝑚𝑚𝑚𝑚𝑚𝑚 − 𝜎𝜎𝑚𝑚𝑖𝑖𝑑𝑑 ≤ 𝜎𝜎𝐷𝐷 ⟹ 𝜎𝜎𝑒𝑒(𝑟𝑟1) − 𝜎𝜎𝑜𝑜(𝑟𝑟1) ≤ 𝜎𝜎𝐷𝐷 .
Pokud za jednotlivé členy dosadíme:
𝜎𝜎𝑑𝑑 = 𝐾𝐾 =𝑝𝑝1 ∙ 𝑟𝑟1
2 − 𝑝𝑝2 ∙ 𝑟𝑟22
𝑟𝑟22 − 𝑟𝑟1
2 ,
𝜎𝜎𝑒𝑒(𝑟𝑟1) = 2 ∙ 𝐾𝐾 + 𝑝𝑝1 = 2 ∙𝑝𝑝1 ∙ 𝑟𝑟1
2 − 𝑝𝑝2 ∙ 𝑟𝑟22
𝑟𝑟22 − 𝑟𝑟1
2 + 𝑝𝑝1,
𝜎𝜎𝑜𝑜(𝑟𝑟1) = −𝑝𝑝1.
dostáváme:
𝑝𝑝1𝐷𝐷 ≤𝜎𝜎𝐷𝐷
2∙ �1 − �
𝑟𝑟1
𝑟𝑟2�
2� ⟹ 𝑝𝑝1𝐷𝐷 ≤
1602
∙ �1 − �251355
�2
� = 40 MPa.
Deformace poloměrů ∆r1 a ∆r2 vyjádříme pomocí rozšířeného Hookova zákona:
∆𝑟𝑟1 = 𝑟𝑟1 ∙ 𝜀𝜀𝑒𝑒(𝑟𝑟1) =𝑟𝑟1
𝐸𝐸∙ {𝜎𝜎𝑒𝑒(𝑟𝑟1) − 𝑣𝑣 ∙ [𝜎𝜎𝑜𝑜(𝑟𝑟1) + 𝜎𝜎𝑑𝑑]} ,
∆𝑟𝑟2 = 𝑟𝑟2 ∙ 𝜀𝜀𝑒𝑒(𝑟𝑟2) =𝑟𝑟1
𝐸𝐸∙ {𝜎𝜎𝑒𝑒(𝑟𝑟2) − 𝑣𝑣 ∙ [𝜎𝜎𝑜𝑜(𝑟𝑟2) + 𝜎𝜎𝑑𝑑]} ,
Tečné a radiální napětí určíme dosazením do základních vztahů:
𝐾𝐾 =𝑝𝑝1 ∙ 𝑟𝑟1
2 − 𝑝𝑝2 ∙ 𝑟𝑟22
𝑟𝑟22 − 𝑟𝑟1
2 =40 ∙ 2512 − 0 ∙ 3552
3552 − 2512 = 40 N ∙ mm−2,
𝜎𝜎𝑑𝑑 = 𝐾𝐾 = 40 N ∙ mm−2,
𝜎𝜎𝑒𝑒(𝑟𝑟1) = 2 ∙ 𝐾𝐾 + 𝑝𝑝1 = 2 ∙ 40,0 + 40 = 120 N ∙ mm−2,
𝜎𝜎𝑜𝑜(𝑟𝑟1) = −𝑝𝑝1 = −40 N ∙ mm−2,
𝜎𝜎𝑒𝑒(𝑟𝑟2) = 2 ∙ 𝐾𝐾 + 𝑝𝑝2 = 2 ∙ 40,0 + 0 = 80 N ∙ mm−2,
𝜎𝜎𝑜𝑜(𝑟𝑟2) = −𝑝𝑝2 = 0 N ∙ mm−2.
Výsledné změny poloměrů budou:
∆𝑟𝑟1 =251
2 ∙ 105 ∙ [120 − 0,3 ∙ (−40 + 40)] = 0,1506 mm,
∆𝑟𝑟2 =355
2 ∙ 105 ∙ [80 − 0,3 ∙ (−0 + 40)] = 0,1207 mm.
r2
σt(x) σr(x) σo
x
– σ +σ r1
p1
0
p2 = 0
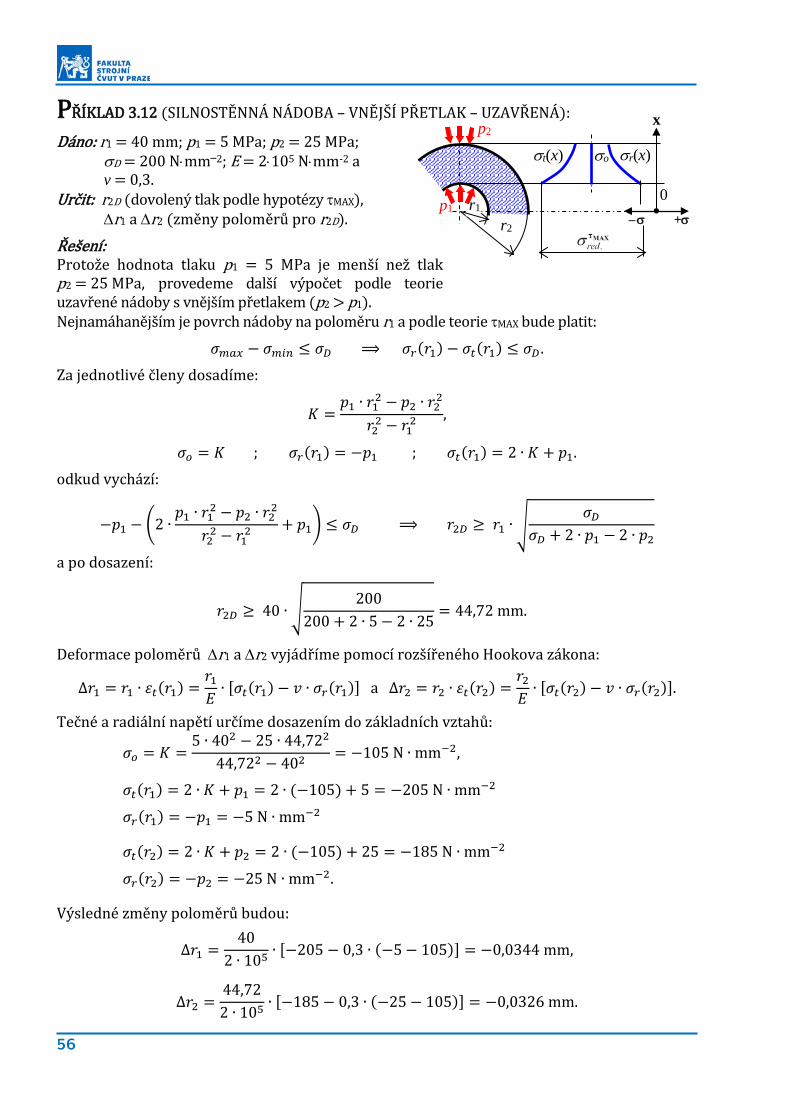
56
PŘÍKLAD 3.12 (SILNOSTĚNNÁ NÁDOBA – VNĚJŠÍ PŘETLAK – UZAVŘENÁ):
Dáno: r1 = 40 mm; p1 = 5 MPa; p2 = 25 MPa; σD = 200 N⋅mm−2; E = 2⋅105 N⋅mm-2 a v = 0,3.
Určit: r2D (dovolený tlak podle hypotézy τMAX), ∆r1 a ∆r2 (změny poloměrů pro r2D).
Řešení: Protože hodnota tlaku p1 = 5 MPa je menší než tlak p2 = 25 MPa, provedeme další výpočet podle teorie uzavřené nádoby s vnějším přetlakem (p2 > p1). Nejnamáhanějším je povrch nádoby na poloměru r1 a podle teorie τMAX bude platit:
𝜎𝜎𝑚𝑚𝑚𝑚𝑚𝑚 − 𝜎𝜎𝑚𝑚𝑖𝑖𝑑𝑑 ≤ 𝜎𝜎𝐷𝐷 ⟹ 𝜎𝜎𝑜𝑜(𝑟𝑟1) − 𝜎𝜎𝑒𝑒(𝑟𝑟1) ≤ 𝜎𝜎𝐷𝐷 .
Za jednotlivé členy dosadíme:
𝐾𝐾 =𝑝𝑝1 ∙ 𝑟𝑟1
2 − 𝑝𝑝2 ∙ 𝑟𝑟22
𝑟𝑟22 − 𝑟𝑟1
2 ,
𝜎𝜎𝑑𝑑 = 𝐾𝐾 ; 𝜎𝜎𝑜𝑜(𝑟𝑟1) = −𝑝𝑝1 ; 𝜎𝜎𝑒𝑒(𝑟𝑟1) = 2 ∙ 𝐾𝐾 + 𝑝𝑝1.
odkud vychází:
−𝑝𝑝1 − �2 ∙𝑝𝑝1 ∙ 𝑟𝑟1
2 − 𝑝𝑝2 ∙ 𝑟𝑟22
𝑟𝑟22 − 𝑟𝑟1
2 + 𝑝𝑝1� ≤ 𝜎𝜎𝐷𝐷 ⟹ 𝑟𝑟2𝐷𝐷 ≥ 𝑟𝑟1 ∙ �𝜎𝜎𝐷𝐷
𝜎𝜎𝐷𝐷 + 2 ∙ 𝑝𝑝1 − 2 ∙ 𝑝𝑝2
a po dosazení:
𝑟𝑟2𝐷𝐷 ≥ 40 ∙ � 200200 + 2 ∙ 5 − 2 ∙ 25
= 44,72 mm.
Deformace poloměrů ∆r1 a ∆r2 vyjádříme pomocí rozšířeného Hookova zákona:
∆𝑟𝑟1 = 𝑟𝑟1 ∙ 𝜀𝜀𝑒𝑒(𝑟𝑟1) =𝑟𝑟1
𝐸𝐸∙ [𝜎𝜎𝑒𝑒(𝑟𝑟1) − 𝑣𝑣 ∙ 𝜎𝜎𝑜𝑜(𝑟𝑟1)] a ∆𝑟𝑟2 = 𝑟𝑟2 ∙ 𝜀𝜀𝑒𝑒(𝑟𝑟2) =
𝑟𝑟2
𝐸𝐸∙ [𝜎𝜎𝑒𝑒(𝑟𝑟2) − 𝑣𝑣 ∙ 𝜎𝜎𝑜𝑜(𝑟𝑟2)].
Tečné a radiální napětí určíme dosazením do základních vztahů:
𝜎𝜎𝑑𝑑 = 𝐾𝐾 =5 ∙ 40
2 − 25 ∙ 44,72 2
44,72 2 − 40
2 = −105 N ∙ mm−2,
𝜎𝜎𝑒𝑒(𝑟𝑟1) = 2 ∙ 𝐾𝐾 + 𝑝𝑝1 = 2 ∙ (−105) + 5 = −205 N ∙ mm−2
𝜎𝜎𝑜𝑜(𝑟𝑟1) = −𝑝𝑝1 = −5 N ∙ mm−2
𝜎𝜎𝑒𝑒(𝑟𝑟2) = 2 ∙ 𝐾𝐾 + 𝑝𝑝2 = 2 ∙ (−105) + 25 = −185 N ∙ mm−2
𝜎𝜎𝑜𝑜(𝑟𝑟2) = −𝑝𝑝2 = −25 N ∙ mm−2.
Výsledné změny poloměrů budou:
∆𝑟𝑟1 =40
2 ∙ 105 ∙ [−205 − 0,3 ∙ (−5 − 105)] = −0,0344 mm,
∆𝑟𝑟2 =44,722 ∙ 105 ∙ [−185 − 0,3 ∙ (−25 − 105)] = −0,0326 mm.
r2
σt(x) σr(x) σo
x
– σ +σ r1
p2
p1
0

Pružnost a pevnost II ZS 2018/2019
57
PŘÍKLAD 3.13 (SILNOSTĚNNÁ NÁDOBA – VNĚJŠÍ PŘETLAK – UZAVŘENÁ):
Dáno: r1 = 40 mm; r2 = 50 MPa; p2 = 40 MPa; σD = 150 N⋅mm−2; E = 2⋅105 N⋅mm−2 a v = 0,3.
Určit: p1D (dovolený tlak podle hypotézy τMAX), ∆r1 a ∆r2 (změny poloměrů pro tlak p1D).
Řešení: Protože hodnota tlaku p2 = 0 MPa bude se jednat o nádobu s vnitřním přetlakem (p1 > p2). Nejnamáhanějším je povrch nádoby na poloměru r1 a podle teorie τMAX bude platit:
𝜎𝜎𝑚𝑚𝑚𝑚𝑚𝑚 − 𝜎𝜎𝑚𝑚𝑖𝑖𝑑𝑑 ≤ 𝜎𝜎𝐷𝐷 ⟹ 𝜎𝜎𝑒𝑒(𝑟𝑟1) − 𝜎𝜎𝑜𝑜(𝑟𝑟1) ≤ 𝜎𝜎𝐷𝐷 .
Pokud za jednotlivé členy dosadíme:
𝜎𝜎𝑑𝑑 = 𝐾𝐾 =𝑝𝑝1 ∙ 𝑟𝑟1
2 − 𝑝𝑝2 ∙ 𝑟𝑟22
𝑟𝑟22 − 𝑟𝑟1
2 ,
𝜎𝜎𝑒𝑒(𝑟𝑟1) = 2 ∙ 𝐾𝐾 + 𝑝𝑝1 = 2 ∙𝑝𝑝1 ∙ 𝑟𝑟1
2 − 𝑝𝑝2 ∙ 𝑟𝑟22
𝑟𝑟22 − 𝑟𝑟1
2 + 𝑝𝑝1,
𝜎𝜎𝑜𝑜(𝑟𝑟1) = −𝑝𝑝1. dostáváme:
𝑝𝑝1𝐷𝐷 ≥ 𝑝𝑝2 −𝜎𝜎𝐷𝐷
2∙ �1 − �
𝑟𝑟1
𝑟𝑟2�
2� ⟹ 𝑝𝑝1𝐷𝐷 ≥ 40 −
1502
∙ �1 − �4050
�2
� = 13 MPa.
Deformace poloměrů ∆r1 a ∆r2 vyjádříme pomocí rozšířeného Hookova zákona:
∆𝑟𝑟1 = 𝑟𝑟1 ∙ 𝜀𝜀𝑒𝑒(𝑟𝑟1) =𝑟𝑟1
𝐸𝐸∙ {𝜎𝜎𝑒𝑒(𝑟𝑟1) − 𝑣𝑣 ∙ [𝜎𝜎𝑜𝑜(𝑟𝑟1) + 𝜎𝜎𝑑𝑑]} ,
∆𝑟𝑟2 = 𝑟𝑟2 ∙ 𝜀𝜀𝑒𝑒(𝑟𝑟2) =𝑟𝑟1
𝐸𝐸∙ {𝜎𝜎𝑒𝑒(𝑟𝑟2) − 𝑣𝑣 ∙ [𝜎𝜎𝑜𝑜(𝑟𝑟2) + 𝜎𝜎𝑑𝑑]} ,
Tečné a radiální napětí určíme dosazením do základních vztahů:
𝜎𝜎𝑑𝑑 = 𝐾𝐾 =𝑝𝑝1 ∙ 𝑟𝑟1
2 − 𝑝𝑝2 ∙ 𝑟𝑟22
𝑟𝑟22 − 𝑟𝑟1
2 =13 ∙ 402 − 40 ∙ 502
502 − 402 = −88 N ∙ mm−2,
𝜎𝜎𝑒𝑒(𝑟𝑟1) = 2 ∙ 𝐾𝐾 + 𝑝𝑝1 = 2 ∙ (−88) + 13 = −163 N ∙ mm−2,
𝜎𝜎𝑜𝑜(𝑟𝑟1) = −𝑝𝑝1 = −40 N ∙ mm−2,
𝜎𝜎𝑒𝑒(𝑟𝑟2) = 2 ∙ 𝐾𝐾 + 𝑝𝑝2 = 2 ∙ (−88) + 40 = −136 N ∙ mm−2,
𝜎𝜎𝑜𝑜(𝑟𝑟2) = −𝑝𝑝2 = −40 N ∙ mm−2.
Výsledné změny poloměrů budou:
∆𝑟𝑟1 =40
2 ∙ 105 ∙ [−163 − 0,3 ∙ (−13 − 88)] = −0,0265 mm,
∆𝑟𝑟2 =50
2 ∙ 105 ∙ [−136 − 0,3 ∙ (−40 − 88)] = −0,0244 mm.
r2
σt(x) σr(x) σo
x
– σ +σ r1
p2
p1
0

58
PŘÍKLAD 3.14 (NALISOVANÝ SPOJ NÁBOJ/HŘÍDEL):
Dáno: d = 100 mm; D = 150 mm; b = 40 mm; f = 0,15 (součinitel tření v tečném směru); EH = EN = E = 2,1⋅105 N⋅mm–2; σDH = σDN = σD = 220 N⋅mm–2 .
Určit: ∆r2 (maximální přípustný přesah na poloměru r2), MKD (dovolený přenášený krouticí moment).
Řešení: Z teorie nalisovaných nádob víme, že při stejných materiálech je vždy namáhanější náboj (N) oproti plnému hřídeli (H). Maximální dovolený kontaktní tlak p2D tedy určíme z pevnostní podmínky samotného náboje sestavené podle pevnostní hypotézy τMAX (silnostěnná nádoba s vnitřním přetlakem p2D při p3 = 0):
𝑝𝑝2𝐷𝐷 ≤𝜎𝜎𝐷𝐷
2∙ �1 − �
𝑟𝑟2
𝑟𝑟3�
2� =
2202
∙ �1 − �100
2150
2�
2
� = 61,1 MPa .
Pro výpočet přesahu náboj/hřídel použijeme vztah z teorie nalisovaných nádob, který upravíme:
∆𝑟𝑟2 =𝑟𝑟2
𝐸𝐸∙ [𝜎𝜎𝑒𝑒
𝐾𝐾(𝑟𝑟2) − 𝜎𝜎𝑒𝑒𝐾𝐾(𝑟𝑟2)] =
𝑟𝑟2
𝐸𝐸∙ [(2 ∙ 𝐾𝐾𝐾𝐾 + 𝑝𝑝2𝐷𝐷) − (2 ∙ 𝐾𝐾𝐾𝐾 + 𝑝𝑝2𝐷𝐷)] =
2 ∙ 𝑟𝑟2
𝐸𝐸∙ (𝐾𝐾𝐾𝐾 − 𝐾𝐾𝐾𝐾).
Pro vypočtený kontaktní tlak p2D nyní určíme konstanty KH (hřídele) a KN (náboje):
𝐾𝐾𝐾𝐾 =𝑝𝑝1 ∙ 𝑟𝑟1
2 − 𝑝𝑝2𝐷𝐷 ∙ 𝑟𝑟22
𝑟𝑟22 − 𝑟𝑟1
2 𝑝𝑝1=0𝑜𝑜1=0���� 𝐾𝐾𝐾𝐾 =
−𝑝𝑝2𝐷𝐷 ∙ 𝑟𝑟22
𝑟𝑟22 = −𝑝𝑝2𝐷𝐷 = −61,1 N ∙ mm−2,
𝐾𝐾𝐾𝐾 =𝑝𝑝2𝐷𝐷 ∙ 𝑟𝑟2
2 − 𝑝𝑝3 ∙ 𝑟𝑟32
𝑟𝑟32 − 𝑟𝑟2
2 𝑝𝑝3=0���� 𝐾𝐾𝐾𝐾 =
𝑝𝑝2𝐷𝐷 ∙ 𝑟𝑟22
𝑟𝑟32 − 𝑟𝑟2
2=61,1 ∙ �100
2 �2
�1502 �
2− �100
2 �2 = 48,8 N ∙ mm−2.
Do upraveného vztahu pro výpočet přesahu nalisovaných nádob dosadíme vypočtené hodnoty konstant KN a KH:
∆𝑟𝑟2 =2 ∙ 𝑟𝑟2
𝐸𝐸∙ (𝐾𝐾𝐾𝐾 − 𝐾𝐾𝐾𝐾) =
2 ∙ 1002
2,1 ∙ 105 ∙ [48,8 − (61,1)] = 0,0523 mm ≈ 52 μm .
Maximální krouticí moment MKD bude záviset na:
• velikosti kontaktní plochy náboj/hřídel: 𝐴𝐴2 = 𝜋𝜋 ∙ 𝑑𝑑 ∙ 𝑏𝑏 = 𝜋𝜋 ∙ 100 ∙ 40 = 12 566,4 mm2 , • velikosti dovoleného kontaktního tlaku: 𝑝𝑝2𝐷𝐷 = 61,1 MPa , • součiniteli tření náboj/hřídel v tečném směru: 𝑓𝑓 = 0,15 .
𝑀𝑀𝐾𝐾𝐷𝐷 = 𝑇𝑇2 ∙𝑑𝑑2
= 𝑁𝑁2 ∙ 𝑓𝑓 ∙𝑑𝑑2
= 𝑝𝑝2𝐷𝐷 ∙ 𝐴𝐴2 ∙ 𝑓𝑓 ∙𝑑𝑑2
= 61,1 ∙ 12 566,4 ∙ 0,15 ∙100
2= 5 758 553 N ∙ mm .
Tento výsledek znamená, že při zachování pevnostní podmínky podle hypotézy τMAX, kdy bude redukované napětí v náboji na stykové ploše náboj/hřídel právě rovno zadanému dovolenému napětí, je schopen tento nalisovaný spoj přenést krouticí moment 𝑀𝑀𝐾𝐾𝐷𝐷 ≈ 5,76 kN ∙ m.
∅d
∅D
MK
b

Pružnost a pevnost II ZS 2018/2019
59
PŘÍKLAD 3.15 (VOLNÝ TENKÝ ROTUJÍCÍ KOTOUČ):
Dáno: Uvažujme běžné CD nebo DVD vyrobené z polykarbonátu. Základní parametry disku jsou: d = 15 mm, D = 120 mm, h = 1,2 mm, ρ = 1 190 kg⋅m−3, ν = 0,3, E = 850 N⋅mm−2, σK = 60 N⋅mm−2, σPt = 70 N⋅mm−2. POZOR!! Veškeré výpočty je třeba provádět v jednotkách soustavy SI vzhledem k zadané hustotě a hlavně k užívání úhlové rychlosti: (E = 850⋅106 N⋅m-2, σK = 60⋅106 N⋅m-2, σPt = 70⋅106 N⋅m-2).
Určit: kK a kPt (bezpečnosti k mezi kluzu a mezi pevnosti při otáčkách n = 10 000 1⋅min−1), ∆r1 a ∆r2 (změny poloměrů pro dané otáčky).
Řešení: Vztahy pro tečné a radiální napětí vznikající v tenkém rotujícím kotouči obecně jsou:
𝜎𝜎𝑒𝑒(𝑚𝑚) = 𝐶𝐶1 +𝐶𝐶2
𝑚𝑚2 −1 + 3 ∙ 𝑣𝑣
8∙ 𝐴𝐴 ∙ 𝑚𝑚2
𝜎𝜎𝑜𝑜(𝑚𝑚) = 𝐶𝐶1 −𝐶𝐶2
𝑚𝑚2 −3 + 𝑣𝑣
8∙ 𝐴𝐴 ∙ 𝑚𝑚2.
Velikost konstanty A závisí pouze na materiálu kotouče a otáčkách (úhlové rychlosti):
𝐴𝐴 = 𝜌𝜌 ∙ 𝜔𝜔2 = 𝜌𝜌 ∙ �2 ∙ 𝜋𝜋 ∙ 𝑚𝑚
60�
2
= 1190 ∙ �2 ∙ 𝜋𝜋 ∙ 10000
60�
2
= 1,305 ∙ 109 kg ∙ m−3 ∙ s−2
Konstanty C1 a C2 určíme z okrajových podmínek. CD/DVD disk můžeme považovat vzhledem ke způsobu unášení v jeho středu jako volný kotouč na obou svých okrajích, pro které tedy musí platit následující okrajové podmínky:
1. 𝜎𝜎𝑜𝑜(𝑟𝑟1) = 0 ⟹ 0 = 𝐶𝐶1 −𝐶𝐶2
𝑟𝑟12 −
3 + 𝑣𝑣8
∙ 𝐴𝐴 ∙ 𝑟𝑟12
2. 𝜎𝜎𝑜𝑜(𝑟𝑟2) = 0 ⟹ 0 = 𝐶𝐶1 −𝐶𝐶2
𝑟𝑟22 −
3 + 𝑣𝑣8
∙ 𝐴𝐴 ∙ 𝑟𝑟22.
Po dosazení zadaných hodnot dostáváme velikosti obou konstant:
𝐶𝐶1 =3 + 𝑣𝑣
8∙ 𝐴𝐴 ∙ (𝑟𝑟1
2 + 𝑟𝑟22) =
3,38
∙ 1,305 ∙ 109 ∙ (0,0075 2 + 0,06
2) = 1968205 N ∙ m−2,
𝐶𝐶2 =3 + 𝑣𝑣
8∙ 𝐴𝐴 ∙ 𝑟𝑟1
2 ∙ 𝑟𝑟22 =
3,38
∙ 1,305 ∙ 109 ∙ 0,0075 2 ∙ 0,06
2 = 109 N.
Poznámka: Povšimněte si rozměrů obou konstant, které jsou shodné s rozměry integračních konstant u silnostěnných nádob jen s tím rozdílem, že zde má konstanta C1 pouze „matematický“ význam, zatímco u silnostěnných nádob mohla mít i „fyzikální“ význam jako osové napětí v uzavřené nádobě. Rozměr konstanty C2 je sice stejný jako rozměr síly, ale je to jen „matematická“ shoda a konstanta má jen a jen „matematický“ význam.
Maximální tečné napětí vzniká na vnitřním poloměru disku r1 a jeho velikost je:
𝜎𝜎𝑒𝑒(𝑟𝑟1) =3 + 𝑣𝑣
8∙ 𝐴𝐴 ∙ (𝑟𝑟1
2 + 𝑟𝑟22) +
(3 + 𝑣𝑣) ∙ 𝐴𝐴 ∙ 𝑟𝑟22
8−
1 + 3 ∙ 𝑣𝑣8
∙ 𝐴𝐴 ∙ 𝑟𝑟12.
Výraz se poměrně zjednoduší:
𝜎𝜎𝑒𝑒(𝑟𝑟1) =𝐴𝐴4
∙ [𝑟𝑟12 ∙ (1 − 𝑣𝑣) + 𝑟𝑟2
2 ∙ (3 + 𝑣𝑣)]
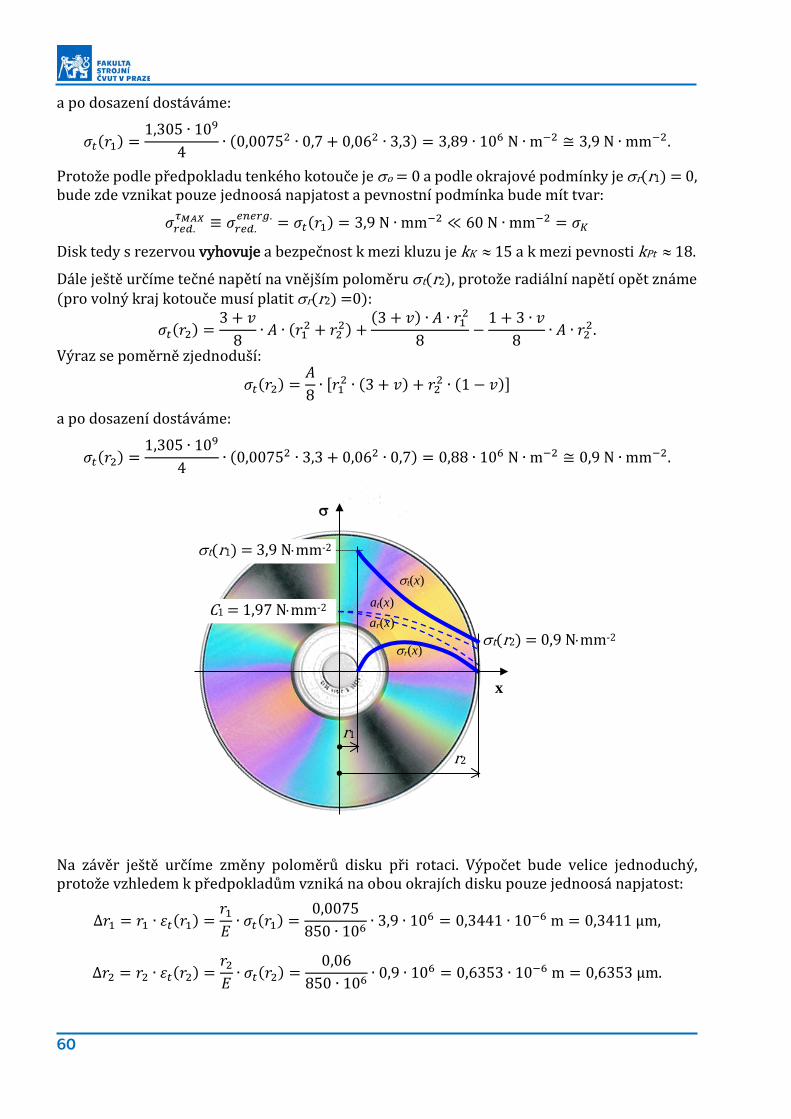
60
a po dosazení dostáváme:
𝜎𝜎𝑒𝑒(𝑟𝑟1) =1,305 ∙ 109
4∙ (0,0075
2 ∙ 0,7 + 0,06 2 ∙ 3,3) = 3,89 ∙ 106 N ∙ m−2 ≅ 3,9 N ∙ mm−2.
Protože podle předpokladu tenkého kotouče je σo = 0 a podle okrajové podmínky je σr(r1) = 0, bude zde vznikat pouze jednoosá napjatost a pevnostní podmínka bude mít tvar:
𝜎𝜎𝑜𝑜𝑐𝑐𝑑𝑑.𝜏𝜏𝑀𝑀𝐴𝐴𝑀𝑀 ≡ 𝜎𝜎𝑜𝑜𝑐𝑐𝑑𝑑.
𝑐𝑐𝑑𝑑𝑐𝑐𝑜𝑜𝑒𝑒. = 𝜎𝜎𝑒𝑒(𝑟𝑟1) = 3,9 N ∙ mm−2 ≪ 60 N ∙ mm−2 = 𝜎𝜎𝐾𝐾
Disk tedy s rezervou vyhovuje a bezpečnost k mezi kluzu je kK ≈ 15 a k mezi pevnosti kPt ≈ 18.
Dále ještě určíme tečné napětí na vnějším poloměru σt(r2), protože radiální napětí opět známe (pro volný kraj kotouče musí platit σr(r2) =0):
𝜎𝜎𝑒𝑒(𝑟𝑟2) =3 + 𝑣𝑣
8∙ 𝐴𝐴 ∙ (𝑟𝑟1
2 + 𝑟𝑟22) +
(3 + 𝑣𝑣) ∙ 𝐴𝐴 ∙ 𝑟𝑟12
8−
1 + 3 ∙ 𝑣𝑣8
∙ 𝐴𝐴 ∙ 𝑟𝑟22.
Výraz se poměrně zjednoduší:
𝜎𝜎𝑒𝑒(𝑟𝑟2) =𝐴𝐴8
∙ [𝑟𝑟12 ∙ (3 + 𝑣𝑣) + 𝑟𝑟2
2 ∙ (1 − 𝑣𝑣)]
a po dosazení dostáváme:
𝜎𝜎𝑒𝑒(𝑟𝑟2) =1,305 ∙ 109
4∙ (0,0075
2 ∙ 3,3 + 0,06 2 ∙ 0,7) = 0,88 ∙ 106 N ∙ m−2 ≅ 0,9 N ∙ mm−2.
Na závěr ještě určíme změny poloměrů disku při rotaci. Výpočet bude velice jednoduchý, protože vzhledem k předpokladům vzniká na obou okrajích disku pouze jednoosá napjatost:
∆𝑟𝑟1 = 𝑟𝑟1 ∙ 𝜀𝜀𝑒𝑒(𝑟𝑟1) =𝑟𝑟1
𝐸𝐸∙ 𝜎𝜎𝑒𝑒(𝑟𝑟1) =
0,0075850 ∙ 106 ∙ 3,9 ∙ 106 = 0,3441 ∙ 10−6 m = 0,3411 μm,
∆𝑟𝑟2 = 𝑟𝑟2 ∙ 𝜀𝜀𝑒𝑒(𝑟𝑟2) =𝑟𝑟2
𝐸𝐸∙ 𝜎𝜎𝑒𝑒(𝑟𝑟2) =
0,06850 ∙ 106 ∙ 0,9 ∙ 106 = 0,6353 ∙ 10−6 m = 0,6353 μm.
r1
σt(x)
σr(x)
at(x) ar(x)
σt(r1) = 3,9 N⋅mm-2
σt(r2) = 0,9 N⋅mm-2
r2
x
σ
C1 = 1,97 N⋅mm-2
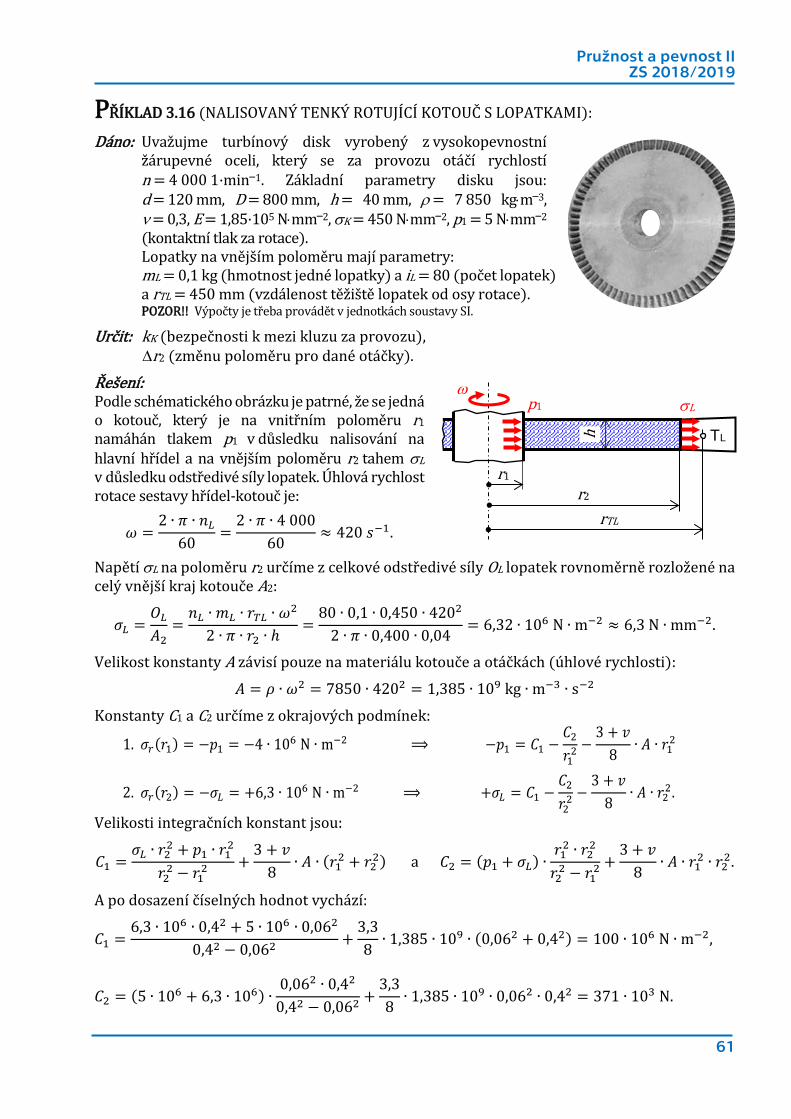
Pružnost a pevnost II ZS 2018/2019
61
PŘÍKLAD 3.16 (NALISOVANÝ TENKÝ ROTUJÍCÍ KOTOUČ S LOPATKAMI):
Dáno: Uvažujme turbínový disk vyrobený z vysokopevnostní žárupevné oceli, který se za provozu otáčí rychlostí n = 4 000 1·min−1. Základní parametry disku jsou: d = 120 mm, D = 800 mm, h = 40 mm, ρ = 7 850 kg⋅m−3, ν = 0,3, E = 1,85·105 N⋅mm−2, σK = 450 N⋅mm−2, p1 = 5 N⋅mm−2 (kontaktní tlak za rotace). Lopatky na vnějším poloměru mají parametry: mL = 0,1 kg (hmotnost jedné lopatky) a iL = 80 (počet lopatek) a rTL = 450 mm (vzdálenost těžiště lopatek od osy rotace). POZOR!! Výpočty je třeba provádět v jednotkách soustavy SI.
Určit: kK (bezpečnosti k mezi kluzu za provozu), ∆r2 (změnu poloměru pro dané otáčky).
Řešení: Podle schématického obrázku je patrné, že se jedná o kotouč, který je na vnitřním poloměru r1 namáhán tlakem p1 v důsledku nalisování na hlavní hřídel a na vnějším poloměru r2 tahem σL v důsledku odstředivé síly lopatek. Úhlová rychlost rotace sestavy hřídel-kotouč je:
𝜔𝜔 =2 ∙ 𝜋𝜋 ∙ 𝑚𝑚𝐿𝐿
60=
2 ∙ 𝜋𝜋 ∙ 4 00060
≈ 420 𝑑𝑑−1.
Napětí σL na poloměru r2 určíme z celkové odstředivé síly OL lopatek rovnoměrně rozložené na celý vnější kraj kotouče A2:
𝜎𝜎𝐿𝐿 =𝑂𝑂𝐿𝐿
𝐴𝐴2=
𝑚𝑚𝐿𝐿 ∙ 𝑚𝑚𝐿𝐿 ∙ 𝑟𝑟𝑇𝑇𝐿𝐿 ∙ 𝜔𝜔2
2 ∙ 𝜋𝜋 ∙ 𝑟𝑟2 ∙ ℎ=
80 ∙ 0,1 ∙ 0,450 ∙ 4202
2 ∙ 𝜋𝜋 ∙ 0,400 ∙ 0,04= 6,32 ∙ 106 N ∙ m−2 ≈ 6,3 N ∙ mm−2.
Velikost konstanty A závisí pouze na materiálu kotouče a otáčkách (úhlové rychlosti):
𝐴𝐴 = 𝜌𝜌 ∙ 𝜔𝜔2 = 7850 ∙ 4202 = 1,385 ∙ 109 kg ∙ m−3 ∙ s−2
Konstanty C1 a C2 určíme z okrajových podmínek:
1. 𝜎𝜎𝑜𝑜(𝑟𝑟1) = −𝑝𝑝1 = −4 ∙ 106 N ∙ m−2 ⟹ −𝑝𝑝1 = 𝐶𝐶1 −𝐶𝐶2
𝑟𝑟12 −
3 + 𝑣𝑣8
∙ 𝐴𝐴 ∙ 𝑟𝑟12
2. 𝜎𝜎𝑜𝑜(𝑟𝑟2) = −𝜎𝜎𝐿𝐿 = +6,3 ∙ 106 N ∙ m−2 ⟹ +𝜎𝜎𝐿𝐿 = 𝐶𝐶1 −𝐶𝐶2
𝑟𝑟22 −
3 + 𝑣𝑣8
∙ 𝐴𝐴 ∙ 𝑟𝑟22.
Velikosti integračních konstant jsou:
𝐶𝐶1 =𝜎𝜎𝐿𝐿 ∙ 𝑟𝑟2
2 + 𝑝𝑝1 ∙ 𝑟𝑟12
𝑟𝑟22 − 𝑟𝑟1
2 +3 + 𝑣𝑣
8∙ 𝐴𝐴 ∙ (𝑟𝑟1
2 + 𝑟𝑟22) a 𝐶𝐶2 = (𝑝𝑝1 + 𝜎𝜎𝐿𝐿) ∙
𝑟𝑟12 ∙ 𝑟𝑟2
2
𝑟𝑟22 − 𝑟𝑟1
2 +3 + 𝑣𝑣
8∙ 𝐴𝐴 ∙ 𝑟𝑟1
2 ∙ 𝑟𝑟22.
A po dosazení číselných hodnot vychází:
𝐶𝐶1 =6,3 ∙ 106 ∙ 0,42 + 5 ∙ 106 ∙ 0,062
0,4 2 − 0,06
2 +3,38
∙ 1,385 ∙ 109 ∙ (0,062 + 0,42) = 100 ∙ 106 N ∙ m−2,
𝐶𝐶2 = (5 ∙ 106 + 6,3 ∙ 106) ∙0,062 ∙ 0,42
0,4 2 − 0,06
2 +3,38
∙ 1,385 ∙ 109 ∙ 0,062 ∙ 0,42 = 371 ∙ 103 N.
TL
r1 r2
rTL
h
p1 σL
ω
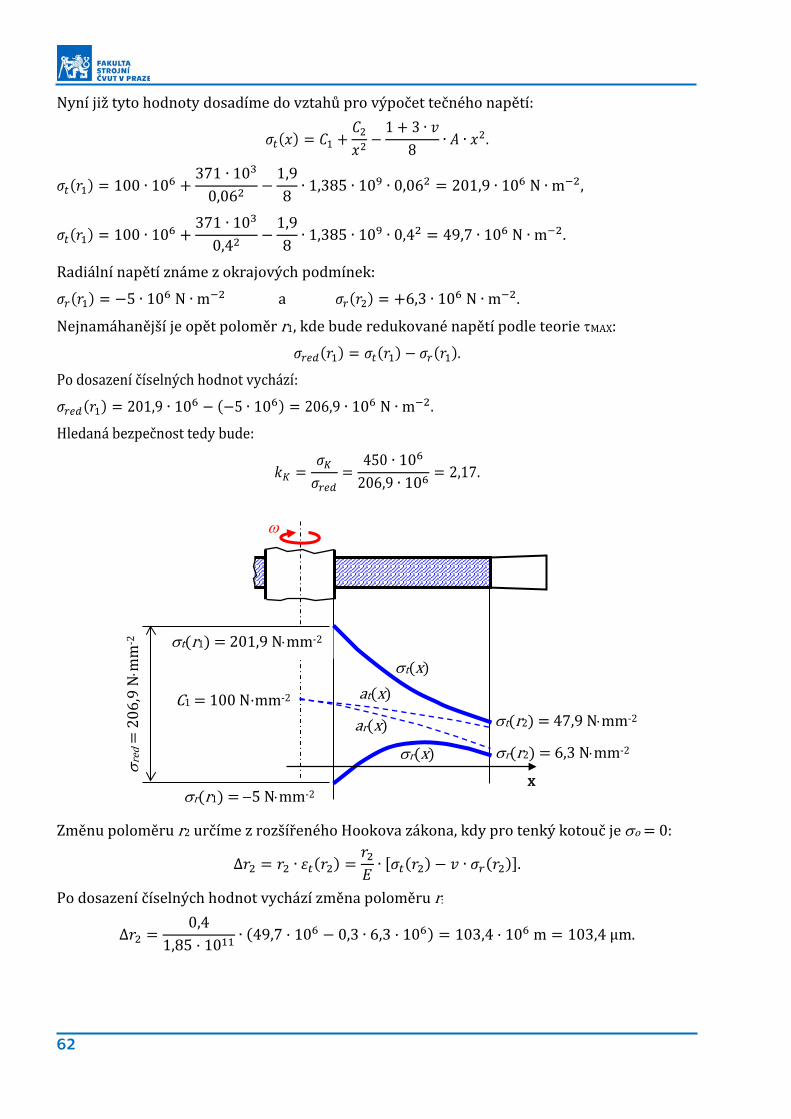
62
Nyní již tyto hodnoty dosadíme do vztahů pro výpočet tečného napětí:
𝜎𝜎𝑒𝑒(𝑚𝑚) = 𝐶𝐶1 +𝐶𝐶2
𝑚𝑚2 −1 + 3 ∙ 𝑣𝑣
8∙ 𝐴𝐴 ∙ 𝑚𝑚2.
𝜎𝜎𝑒𝑒(𝑟𝑟1) = 100 ∙ 106 +371 ∙ 103
0,06 2 −
1,98
∙ 1,385 ∙ 109 ∙ 0,062 = 201,9 ∙ 106 N ∙ m−2,
𝜎𝜎𝑒𝑒(𝑟𝑟1) = 100 ∙ 106 +371 ∙ 103
0,4 2 −
1,98
∙ 1,385 ∙ 109 ∙ 0,42 = 49,7 ∙ 106 N ∙ m−2.
Radiální napětí známe z okrajových podmínek:
𝜎𝜎𝑜𝑜(𝑟𝑟1) = −5 ∙ 106 N ∙ m−2 a 𝜎𝜎𝑜𝑜(𝑟𝑟2) = +6,3 ∙ 106 N ∙ m−2. Nejnamáhanější je opět poloměr r1, kde bude redukované napětí podle teorie τMAX:
𝜎𝜎𝑜𝑜𝑐𝑐𝑑𝑑(𝑟𝑟1) = 𝜎𝜎𝑒𝑒(𝑟𝑟1) − 𝜎𝜎𝑜𝑜(𝑟𝑟1).
Po dosazení číselných hodnot vychází:
𝜎𝜎𝑜𝑜𝑐𝑐𝑑𝑑(𝑟𝑟1) = 201,9 ∙ 106 − (−5 ∙ 106) = 206,9 ∙ 106 N ∙ m−2.
Hledaná bezpečnost tedy bude:
𝑘𝑘𝐾𝐾 =𝜎𝜎𝐾𝐾
𝜎𝜎𝑜𝑜𝑐𝑐𝑑𝑑=
450 ∙ 106
206,9 ∙ 106 = 2,17.
Změnu poloměru r2 určíme z rozšířeného Hookova zákona, kdy pro tenký kotouč je σo = 0:
∆𝑟𝑟2 = 𝑟𝑟2 ∙ 𝜀𝜀𝑒𝑒(𝑟𝑟2) =𝑟𝑟2
𝐸𝐸∙ [𝜎𝜎𝑒𝑒(𝑟𝑟2) − 𝑣𝑣 ∙ 𝜎𝜎𝑜𝑜(𝑟𝑟2)].
Po dosazení číselných hodnot vychází změna poloměru r:
∆𝑟𝑟2 =0,4
1,85 · 1011 ∙ (49,7 · 106 − 0,3 ∙ 6,3 · 106) = 103,4 · 106 m = 103,4 μm.
C1 = 100 N·mm-2
x
ω
σt(r1) = 201,9 N⋅mm-2
σr(r1) = −5 N⋅mm-2
σ red
= 2
06,9
N⋅m
m-2
σt(r2) = 47,9 N⋅mm-2
σr(r2) = 6,3 N⋅mm-2
σt(x)
σr(x)
ar(x)
at(x)
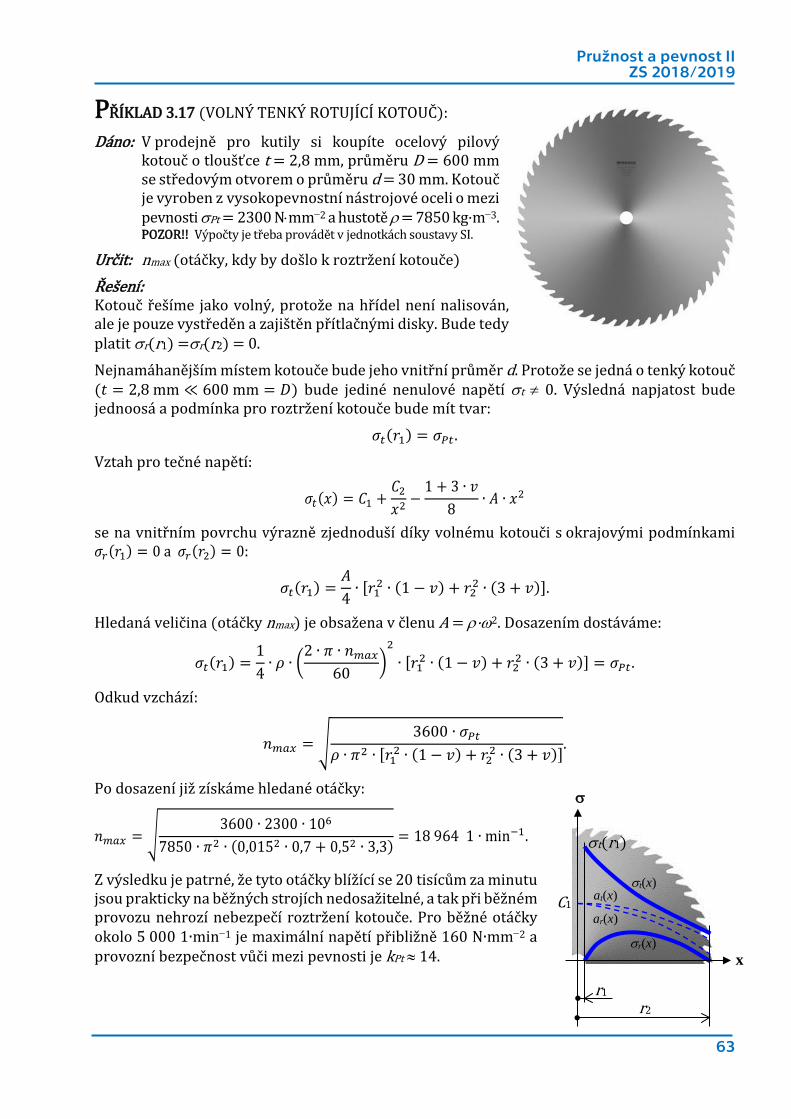
Pružnost a pevnost II ZS 2018/2019
63
PŘÍKLAD 3.17 (VOLNÝ TENKÝ ROTUJÍCÍ KOTOUČ):
Dáno: V prodejně pro kutily si koupíte ocelový pilový kotouč o tloušťce t = 2,8 mm, průměru D = 600 mm se středovým otvorem o průměru d = 30 mm. Kotouč je vyroben z vysokopevnostní nástrojové oceli o mezi pevnosti σPt = 2300 N⋅mm−2 a hustotě ρ = 7850 kg·m−3. POZOR!! Výpočty je třeba provádět v jednotkách soustavy SI.
Určit: nmax (otáčky, kdy by došlo k roztržení kotouče)
Řešení: Kotouč řešíme jako volný, protože na hřídel není nalisován, ale je pouze vystředěn a zajištěn přítlačnými disky. Bude tedy platit σr(r1) =σr(r2) = 0.
Nejnamáhanějším místem kotouče bude jeho vnitřní průměr d. Protože se jedná o tenký kotouč (𝐾𝐾 = 2,8 mm ≪ 600 mm = 𝐷𝐷) bude jediné nenulové napětí σt ≠ 0. Výsledná napjatost bude jednoosá a podmínka pro roztržení kotouče bude mít tvar:
𝜎𝜎𝑒𝑒(𝑟𝑟1) = 𝜎𝜎𝑃𝑃𝑒𝑒.
Vztah pro tečné napětí:
𝜎𝜎𝑒𝑒(𝑚𝑚) = 𝐶𝐶1 +𝐶𝐶2
𝑚𝑚2 −1 + 3 ∙ 𝑣𝑣
8∙ 𝐴𝐴 ∙ 𝑚𝑚2
se na vnitřním povrchu výrazně zjednoduší díky volnému kotouči s okrajovými podmínkami 𝜎𝜎𝑜𝑜(𝑟𝑟1) = 0 a 𝜎𝜎𝑜𝑜(𝑟𝑟2) = 0:
𝜎𝜎𝑒𝑒(𝑟𝑟1) =𝐴𝐴4
∙ [𝑟𝑟12 ∙ (1 − 𝑣𝑣) + 𝑟𝑟2
2 ∙ (3 + 𝑣𝑣)].
Hledaná veličina (otáčky nmax) je obsažena v členu A = ρ·ω2. Dosazením dostáváme:
𝜎𝜎𝑒𝑒(𝑟𝑟1) =14
∙ 𝜌𝜌 ∙ �2 ∙ 𝜋𝜋 ∙ 𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚
60�
2
∙ [𝑟𝑟12 ∙ (1 − 𝑣𝑣) + 𝑟𝑟2
2 ∙ (3 + 𝑣𝑣)] = 𝜎𝜎𝑃𝑃𝑒𝑒.
Odkud vzchází:
𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚 = �3600 ∙ 𝜎𝜎𝑃𝑃𝑒𝑒
𝜌𝜌 ∙ 𝜋𝜋2 ∙ [𝑟𝑟12 ∙ (1 − 𝑣𝑣) + 𝑟𝑟2
2 ∙ (3 + 𝑣𝑣)].
Po dosazení již získáme hledané otáčky:
𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚 = �3600 ∙ 2300 ∙ 106
7850 ∙ 𝜋𝜋2 ∙ (0,015 2 ∙ 0,7 + 0,5
2 ∙ 3,3) = 18 964 1 ∙ min−1.
Z výsledku je patrné, že tyto otáčky blížící se 20 tisícům za minutu jsou prakticky na běžných strojích nedosažitelné, a tak při běžném provozu nehrozí nebezpečí roztržení kotouče. Pro běžné otáčky okolo 5 000 1∙min−1 je maximální napětí přibližně 160 N∙mm−2 a provozní bezpečnost vůči mezi pevnosti je kPt ≈ 14.
σt(x)
at(x)
ar(x)
σt(r1)
r1
σr(x)
σ
C1
r2
x
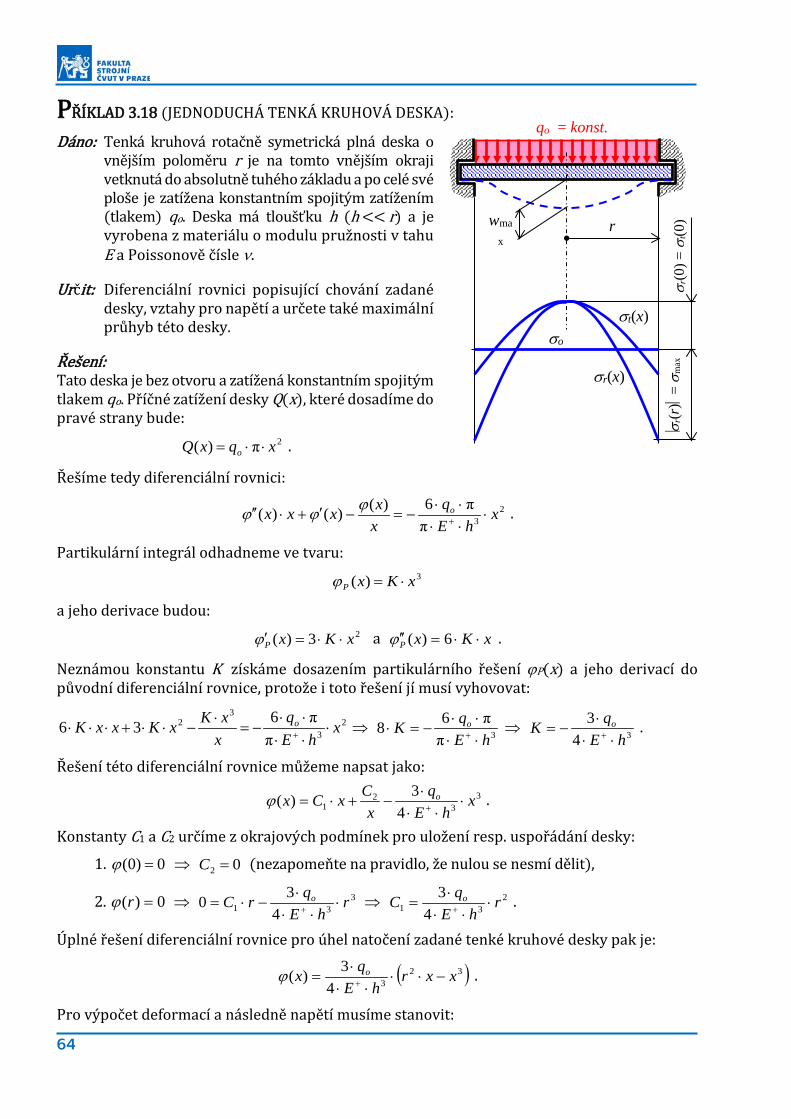
64
PŘÍKLAD 3.18 (JEDNODUCHÁ TENKÁ KRUHOVÁ DESKA):
Dáno: Tenká kruhová rotačně symetrická plná deska o vnějším poloměru r je na tomto vnějším okraji vetknutá do absolutně tuhého základu a po celé své ploše je zatížena konstantním spojitým zatížením (tlakem) qo. Deska má tloušťku h (h << r) a je vyrobena z materiálu o modulu pružnosti v tahu E a Poissonově čísle ν.
Určit: Diferenciální rovnici popisující chování zadané desky, vztahy pro napětí a určete také maximální průhyb této desky.
Řešení: Tato deska je bez otvoru a zatížená konstantním spojitým tlakem qo. Příčné zatížení desky Q(x), které dosadíme do pravé strany bude:
2π)( xqxQ o ⋅⋅= .
Řešíme tedy diferenciální rovnici:
23π
π6)()()( xhE
qxxxxx o ⋅
⋅⋅⋅⋅
−=−′+⋅′′+
ϕϕϕ .
Partikulární integrál odhadneme ve tvaru: 3)( xKxP ⋅=ϕ
a jeho derivace budou: 23)( xKxP ⋅⋅=′ϕ a xKxP ⋅⋅=′′ 6)(ϕ .
Neznámou konstantu K získáme dosazením partikulárního řešení ϕP(x) a jeho derivací do původní diferenciální rovnice, protože i toto řešení jí musí vyhovovat:
23
32
ππ636 xhE
qxxKxKxxK o ⋅
⋅⋅⋅⋅
−=⋅
−⋅⋅+⋅⋅⋅ + ⇒ 3ππ68hE
qK o
⋅⋅⋅⋅
−=⋅ + ⇒ 343
hEqK o
⋅⋅⋅
−= + .
Řešení této diferenciální rovnice můžeme napsat jako:
33
21 4
3)( xhE
qx
CxCx o ⋅⋅⋅
⋅−+⋅= +ϕ .
Konstanty C1 a C2 určíme z okrajových podmínek pro uložení resp. uspořádání desky:
1. 0)0( =ϕ ⇒ 02 =C (nezapomeňte na pravidlo, že nulou se nesmí dělit),
2. 0)( =rϕ ⇒ 331 4
30 rhE
qrC o ⋅⋅⋅
⋅−⋅= + ⇒ 2
31 43 r
hEqC o ⋅
⋅⋅⋅
= + .
Úplné řešení diferenciální rovnice pro úhel natočení zadané tenké kruhové desky pak je:
( )3234
3)( xxrhE
qx o −⋅⋅⋅⋅
⋅= +ϕ .
Pro výpočet deformací a následně napětí musíme stanovit:
σr(x)
σt(x)
wma
x
σ r(0
) = σ
t(0)
σr(r
) =
σm
ax
qo = konst.
r
σo

Pružnost a pevnost II ZS 2018/2019
65
( )2234
3)( xrhE
qxx o −⋅
⋅⋅⋅
= +
ϕ a ( )223 3
43)( xr
hEqx o ⋅−⋅
⋅⋅⋅
=′+ϕ
a tyto hodnoty dosadit do vztahů pro radiální a tečnou deformaci tenké kruhové desky:
( )
( )222
222
83)(
2)(
38
3)(2
)(
xrhE
qxxhx
xrhE
qxhx
ot
or
−⋅⋅⋅
⋅=⋅=
⋅−⋅⋅⋅
⋅=′⋅=
+
+
ϕε
ϕε
a následně do rozšířeného Hookova zákona:
[ ] [ ]
[ ] [ ])31()1(83)()()(
)3()1(83)()()(
222
222
ννενεσ
ννενεσ
⋅+⋅−+⋅⋅⋅⋅
=⋅+⋅=
+⋅−+⋅⋅⋅⋅
=⋅+⋅=
+
+
xrhqxxEx
xrhqxxEx
ortt
otrr
.
Poznámky: • Z průběhů je patrné, že radiální napětí „klesá“ strměji než tečné, protože (3 – ν) > (1 – 3⋅ν).
• Dále je z průběhů patrné, že vyhovují podmínce ve středu a maximálnímu napětí na poloměru r:
)1(8
3)0()0( 2
2
νσσ +⋅⋅
⋅⋅==
hrqo
tr .
• Maximální napětí v této desce bude absolutní hodnota radiálního napětí na poloměru r2:
2
2
2
2
max 43
43)(
hrq
hrqr oo
r ⋅⋅⋅
=⋅
⋅⋅−== σσ .
Výpočet deformace desky je pak již jen jednoduchou integrací funkce ϕ(x):
( ) 3
224
3332
3 2443
43)( Cxrx
hEqCdxxxr
hEqxw oo +
⋅−⋅
⋅⋅⋅
=+⋅−⋅⋅⋅⋅
⋅−= ++∫ .
Integrační konstantu určíme z podmínky pro uložení desky na poloměru r: w(r) = 0
3
224
3 24430 Crrr
hEqo +
⋅−⋅
⋅⋅⋅
= + ⇒ 44
3 4
33r
hEqC o ⋅
⋅⋅⋅
= + .
A tedy:
+
⋅−⋅
⋅⋅⋅
= + 42443)(
4224
3rxrx
hEqxw o .
Hledaný maximální průhyb uprostřed desky bude:
443)0(
4
33maxr
hEqCww o ⋅⋅⋅
⋅=== + .
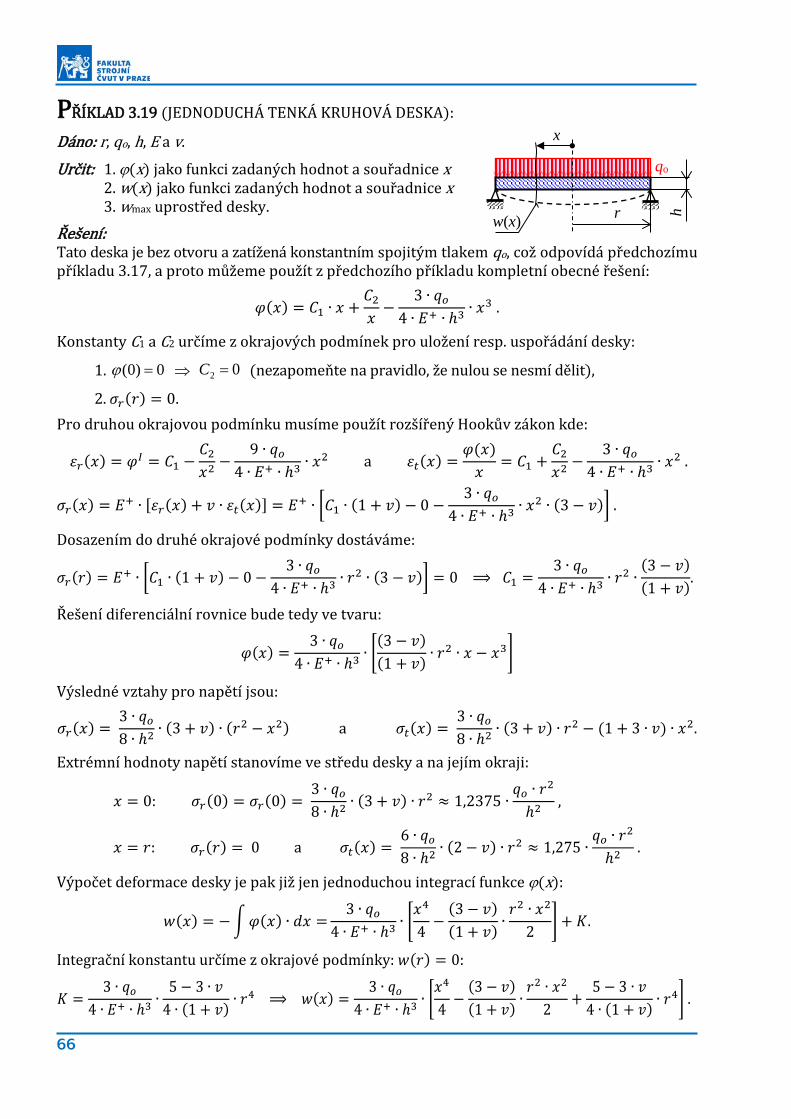
66
PŘÍKLAD 3.19 (JEDNODUCHÁ TENKÁ KRUHOVÁ DESKA):
Dáno: r, qo, h, E a v.
Určit: 1. ϕ(x) jako funkci zadaných hodnot a souřadnice x 2. w(x) jako funkci zadaných hodnot a souřadnice x 3. wmax uprostřed desky.
Řešení: Tato deska je bez otvoru a zatížená konstantním spojitým tlakem qo, což odpovídá předchozímu příkladu 3.17, a proto můžeme použít z předchozího příkladu kompletní obecné řešení:
𝜑𝜑(𝑚𝑚) = 𝐶𝐶1 ∙ 𝑚𝑚 +𝐶𝐶2
𝑚𝑚−
3 ∙ 𝑞𝑞𝑑𝑑
4 ∙ 𝐸𝐸+ ∙ ℎ3 ∙ 𝑚𝑚3 .
Konstanty C1 a C2 určíme z okrajových podmínek pro uložení resp. uspořádání desky:
1. ⇒ (nezapomeňte na pravidlo, že nulou se nesmí dělit),
2. 𝜎𝜎𝑜𝑜(𝑟𝑟) = 0. Pro druhou okrajovou podmínku musíme použít rozšířený Hookův zákon kde:
𝜀𝜀𝑜𝑜(𝑚𝑚) = 𝜑𝜑𝐼𝐼 = 𝐶𝐶1 −𝐶𝐶2
𝑚𝑚2 −9 ∙ 𝑞𝑞𝑑𝑑
4 ∙ 𝐸𝐸+ ∙ ℎ3 ∙ 𝑚𝑚2 a 𝜀𝜀𝑒𝑒(𝑚𝑚) =𝜑𝜑(𝑚𝑚)
𝑚𝑚= 𝐶𝐶1 +
𝐶𝐶2
𝑚𝑚2 −3 ∙ 𝑞𝑞𝑑𝑑
4 ∙ 𝐸𝐸+ ∙ ℎ3 ∙ 𝑚𝑚2 .
𝜎𝜎𝑜𝑜(𝑚𝑚) = 𝐸𝐸+ ∙ [𝜀𝜀𝑜𝑜(𝑚𝑚) + 𝑣𝑣 ∙ 𝜀𝜀𝑒𝑒(𝑚𝑚)] = 𝐸𝐸+ ∙ �𝐶𝐶1 ∙ (1 + 𝑣𝑣) − 0 −3 ∙ 𝑞𝑞𝑑𝑑
4 ∙ 𝐸𝐸+ ∙ ℎ3 ∙ 𝑚𝑚2 ∙ (3 − 𝑣𝑣)� .
Dosazením do druhé okrajové podmínky dostáváme:
𝜎𝜎𝑜𝑜(𝑟𝑟) = 𝐸𝐸+ ∙ �𝐶𝐶1 ∙ (1 + 𝑣𝑣) − 0 −3 ∙ 𝑞𝑞𝑑𝑑
4 ∙ 𝐸𝐸+ ∙ ℎ3 ∙ 𝑟𝑟2 ∙ (3 − 𝑣𝑣)� = 0 ⟹ 𝐶𝐶1 =3 ∙ 𝑞𝑞𝑑𝑑
4 ∙ 𝐸𝐸+ ∙ ℎ3 ∙ 𝑟𝑟2 ∙(3 − 𝑣𝑣)(1 + 𝑣𝑣).
Řešení diferenciální rovnice bude tedy ve tvaru:
𝜑𝜑(𝑚𝑚) =3 ∙ 𝑞𝑞𝑑𝑑
4 ∙ 𝐸𝐸+ ∙ ℎ3 ∙ �(3 − 𝑣𝑣)(1 + 𝑣𝑣) ∙ 𝑟𝑟2 ∙ 𝑚𝑚 − 𝑚𝑚3�
Výsledné vztahy pro napětí jsou:
𝜎𝜎𝑜𝑜(𝑚𝑚) = 3 ∙ 𝑞𝑞𝑑𝑑
8 ∙ ℎ2 ∙ (3 + 𝑣𝑣) ∙ (𝑟𝑟2 − 𝑚𝑚2) a 𝜎𝜎𝑒𝑒(𝑚𝑚) = 3 ∙ 𝑞𝑞𝑑𝑑
8 ∙ ℎ2 ∙ (3 + 𝑣𝑣) ∙ 𝑟𝑟2 − (1 + 3 ∙ 𝑣𝑣) ∙ 𝑚𝑚2.
Extrémní hodnoty napětí stanovíme ve středu desky a na jejím okraji:
𝑚𝑚 = 0: 𝜎𝜎𝑜𝑜(0) = 𝜎𝜎𝑜𝑜(0) = 3 ∙ 𝑞𝑞𝑑𝑑
8 ∙ ℎ2 ∙ (3 + 𝑣𝑣) ∙ 𝑟𝑟2 ≈ 1,2375 ∙𝑞𝑞𝑑𝑑 ∙ 𝑟𝑟2
ℎ2 ,
𝑚𝑚 = 𝑟𝑟: 𝜎𝜎𝑜𝑜(𝑟𝑟) = 0 a 𝜎𝜎𝑒𝑒(𝑚𝑚) = 6 ∙ 𝑞𝑞𝑑𝑑
8 ∙ ℎ2 ∙ (2 − 𝑣𝑣) ∙ 𝑟𝑟2 ≈ 1,275 ∙𝑞𝑞𝑑𝑑 ∙ 𝑟𝑟2
ℎ2 .
Výpočet deformace desky je pak již jen jednoduchou integrací funkce ϕ(x):
𝑤𝑤(𝑚𝑚) = − � 𝜑𝜑(𝑚𝑚) ∙ 𝑑𝑑𝑚𝑚 =3 ∙ 𝑞𝑞𝑑𝑑
4 ∙ 𝐸𝐸+ ∙ ℎ3 ∙ �𝑚𝑚4
4−
(3 − 𝑣𝑣)(1 + 𝑣𝑣) ∙
𝑟𝑟2 ∙ 𝑚𝑚2
2� + 𝐾𝐾.
Integrační konstantu určíme z okrajové podmínky: 𝑤𝑤(𝑟𝑟) = 0:
𝐾𝐾 =3 ∙ 𝑞𝑞𝑑𝑑
4 ∙ 𝐸𝐸+ ∙ ℎ3 ∙5 − 3 ∙ 𝑣𝑣
4 ∙ (1 + 𝑣𝑣) ∙ 𝑟𝑟4 ⟹ 𝑤𝑤(𝑚𝑚) =3 ∙ 𝑞𝑞𝑑𝑑
4 ∙ 𝐸𝐸+ ∙ ℎ3 ∙ �𝑚𝑚4
4−
(3 − 𝑣𝑣)(1 + 𝑣𝑣) ∙
𝑟𝑟2 ∙ 𝑚𝑚2
2+
5 − 3 ∙ 𝑣𝑣4 ∙ (1 + 𝑣𝑣) ∙ 𝑟𝑟4� .
0)0( =ϕ 02 =C
r h
qo
x
w(x)

Pružnost a pevnost II ZS 2018/2019
67
PŘÍKLAD 3.20 (JEDNODUCHÁ TENKÁ KRUHOVÁ DESKA):
Dáno: Tenká kruhová rotačně symetrická plná deska o vnějším poloměru r je na tomto vnějším okraji zatížena momentem m, který je spojitě rozložen po celém obvodě desky. Deska má tloušťku h (h << r) a je vyrobena z materiálu o modulu pružnosti v tahu E a Poissonově čísle ν.
Určit: 1. Diferenciální rovnici popisující chování desky 2. Vztahy pro napětí.
Řešení: Jedná se o desku bez otvoru zatíženou jen momentem m, na kterou tedy nepůsobí žádné příčné zatížení (Q(x) = 0), a proto bude pravá strana diferenciální rovnice rovna 0:
0)()()( =−′+⋅′′xxxxx ϕϕϕ ,
což odpovídá základní rovnici silnostěnných nádob a řešení tedy stanovíme stejně jako u nádob, tedy bez partikulární části ve tvaru:
xCxCx 2
1)( +⋅=ϕ .
Stejně jako u nádoby bez otvoru bude muset být C2 = 0, protože pro x = 0 by výraz C2/x neměl smysl. Průběh funkce ϕ(x) tedy bude jen lineární funkcí souřadnice x. Tím se zjednoduší vztahy pro napětí vyjádřené pomocí obecných vztahů pro deformace a rozšířeného Hookova zákona:
1
1
2)(
2)(
2)(
2)(
Chxxhx
Chxhx
t
r
⋅=⋅=
⋅=′⋅=
ϕε
ϕε ⇒
[ ]
[ ] )1(2
)()()(
)1(2
)()()(
1
1
νενεσ
νενεσ
+⋅⋅⋅=⋅+⋅=
+⋅⋅⋅=⋅+⋅=
++
++
ChExxEx
ChExxEx
rtt
trr
.
Znamená to tedy, že oba průběhy budou totožné a jejich velikost určíme z okrajové podmínky, kdy na vnějším okraji musí být radiální napětí σr vyvolané pouze ohybovým momentem m. Protože moment způsobuje „natahování“ spodního vlákna, budeme radiální napětí uvažovat kladné:
22
6
"1"61)(
hm
h
mwmr
orr
⋅+=
⋅⋅+=+=σ .
Hledané průběhy napětí v této tenké kruhové desce jsou:
2
6)(h
mxr⋅
+=σ a 2
6)(h
mxt⋅
+=σ .
Poznámky: • Pokud bychom dál chtěli řešit funkci ϕ(x), museli bychom stanovit konstantu C1:
216)1(
2)(
hmChExr
⋅=−⋅⋅⋅= + νσ ⇒
)1(12
31 ν−⋅⋅⋅
= + hEmC
• Dále si povšimněte, že průběhy napětí odpovídají nádobě bez otvoru (hřídeli) a jejich velikost je dána velikostí momentu m, který působí na okraji desky.
m
r σr ≡ σt = 6⋅m/h2
σo = 0
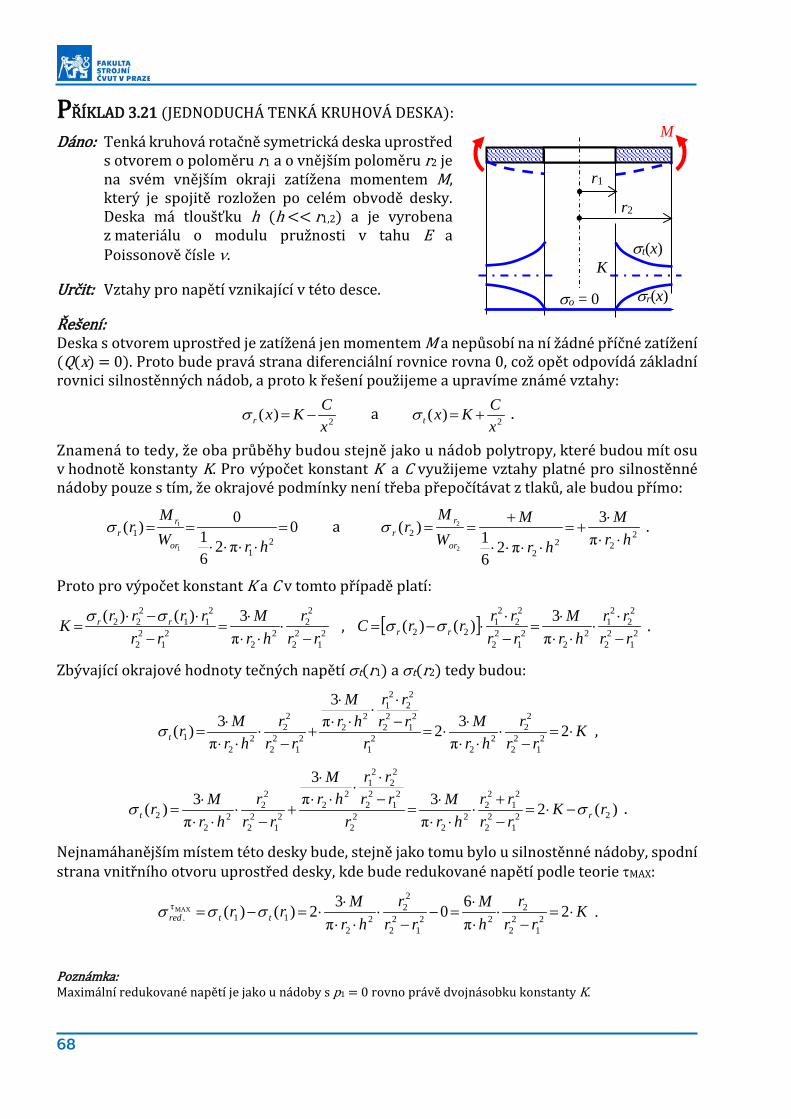
68
PŘÍKLAD 3.21 (JEDNODUCHÁ TENKÁ KRUHOVÁ DESKA):
Dáno: Tenká kruhová rotačně symetrická deska uprostřed s otvorem o poloměru r1 a o vnějším poloměru r2 je na svém vnějším okraji zatížena momentem M, který je spojitě rozložen po celém obvodě desky. Deska má tloušťku h (h << r1,2) a je vyrobena z materiálu o modulu pružnosti v tahu E a Poissonově čísle ν.
Určit: Vztahy pro napětí vznikající v této desce.
Řešení: Deska s otvorem uprostřed je zatížená jen momentem M a nepůsobí na ní žádné příčné zatížení (Q(x) = 0). Proto bude pravá strana diferenciální rovnice rovna 0, což opět odpovídá základní rovnici silnostěnných nádob, a proto k řešení použijeme a upravíme známé vztahy:
2)(xCKxr −=σ a 2)(
xCKxt +=σ .
Znamená to tedy, že oba průběhy budou stejně jako u nádob polytropy, které budou mít osu v hodnotě konstanty K. Pro výpočet konstant K a C využijeme vztahy platné pro silnostěnné nádoby pouze s tím, že okrajové podmínky není třeba přepočítávat z tlaků, ale budou přímo:
0π2
61
0)(2
1
11
1 =⋅⋅⋅⋅
==hrW
Mr
or
rrσ a 2
222
2 π3
π261)(
2
2
hrM
hr
MWM
ror
rr ⋅⋅
⋅+=
⋅⋅⋅⋅
+==σ .
Proto pro výpočet konstant K a C v tomto případě platí:
21
22
22
22
21
22
211
222
π3)()(
rrr
hrM
rrrrrrK rr
−⋅
⋅⋅⋅
=−
⋅−⋅=
σσ , [ ] 21
22
22
21
22
21
22
22
21
22 π3)()(
rrrr
hrM
rrrrrrC rr −
⋅⋅
⋅⋅⋅
=−⋅
⋅−= σσ .
Zbývající okrajové hodnoty tečných napětí σt(r1) a σt(r2) tedy budou:
Krr
rhr
Mr
rrrr
hrM
rrr
hrMrt ⋅=
−⋅
⋅⋅⋅
⋅=−⋅⋅
⋅⋅⋅
+−
⋅⋅⋅
⋅= 2
π32π
3
π3)( 2
12
2
22
22
21
21
22
22
21
22
21
22
22
22
1σ ,
)(2π
3π3
π3)( 22
12
2
21
22
22
22
21
22
22
21
22
21
22
22
22
2 rKrrrr
hrM
rrrrr
hrM
rrr
hrMr rt σσ −⋅=
−+
⋅⋅⋅
⋅=
−⋅
⋅⋅⋅
⋅
+−
⋅⋅⋅
⋅= .
Nejnamáhanějším místem této desky bude, stejně jako tomu bylo u silnostěnné nádoby, spodní strana vnitřního otvoru uprostřed desky, kde bude redukované napětí podle teorie τMAX:
Krr
rhM
rrr
hrMrr ttred ⋅=
−⋅
⋅⋅
=−−
⋅⋅⋅
⋅⋅=−= 2
π60
π32)()( 2
12
2
222
12
2
22
22
11τ
.MAX σσσ .
Poznámka: Maximální redukované napětí je jako u nádoby s p1 = 0 rovno právě dvojnásobku konstanty K.
M
r2
r1
σr(x)
σt(x)
K
σo = 0

Pružnost a pevnost II ZS 2018/2019
69
PŘÍKLAD 3.22 (JEDNODUCHÉ TENKÉ KRUHOVÉ DESKY):
Dáno: q0, resp. M; r1; r2; h; E a ν.
Určit: 1. Napište diferenciální rovnici pro řešení desek 2. Všechny okrajové podmínky potřebné pro řešení.
Řešení – deska A: Deska s otvorem uprostřed je zatížená konstantním spojitým tlakem qo. Řešení provedeme v jednom poli:
x ∈ ⟨0 ; r1⟩: 𝑄𝑄(𝑚𝑚) = 𝑞𝑞𝑂𝑂 ∙ 𝜋𝜋 ∙ (𝑚𝑚2 − 𝑟𝑟12),
𝜑𝜑𝐼𝐼𝐼𝐼(𝑚𝑚) ∙ 𝑚𝑚 + 𝜑𝜑𝐼𝐼(𝑚𝑚) −𝜑𝜑(𝑚𝑚)
𝑚𝑚= −
6 ∙ 𝑞𝑞𝑂𝑂 ∙ (𝑚𝑚2 − 𝑟𝑟12)
𝐸𝐸+ ∙ ℎ3 = −𝐵𝐵 ∙ 𝑚𝑚2 + 𝐶𝐶 ,
kde:
𝐵𝐵 =6 ∙ 𝑞𝑞0
𝐸𝐸+ ∙ ℎ3 a 𝐶𝐶 =6 ∙ 𝑞𝑞0 ∙ 𝑟𝑟1
2
𝐸𝐸+ ∙ ℎ3 .
Vzhledem k nenulové pravé straně bude obecné řešení obsahovat partikulární integrál 𝜑𝜑𝑃𝑃(𝑚𝑚), který by bylo možné buď odhadnout (pro zdatné matematiky) nebo vyřešit postupnou integrací „staženého“ tvaru diferenciální rovnice. Obecné řešení zapíšeme ve tvaru:
𝜑𝜑(𝑚𝑚) = 𝐶𝐶1 ∙ 𝑚𝑚 +𝐶𝐶2
𝑚𝑚+ 𝜑𝜑𝑃𝑃(𝑚𝑚).
Pro stanovení integračních konstant musíme sestavit dvě okrajové podmínky:
1. 𝑚𝑚 = 𝑟𝑟1: 𝜎𝜎𝑜𝑜(𝑟𝑟1) = 0 ,
2. 𝑚𝑚 = 𝑟𝑟2: 𝜑𝜑(𝑟𝑟2) = 0 .
Řešení – deska B: Deska s otvorem uprostřed je bez příčného zatížení. Řešení provedeme v jednom poli:
x ∈ ⟨0 ; r1⟩: 𝑄𝑄(𝑚𝑚) = 0 ,
𝜑𝜑𝐼𝐼𝐼𝐼(𝑚𝑚) ∙ 𝑚𝑚 + 𝜑𝜑𝐼𝐼(𝑚𝑚) −𝜑𝜑(𝑚𝑚)
𝑚𝑚= 0 .
Vzhledem k nulové pravé straně nebude obecné řešení obsahovat partikulární integrál a jeho tvar bude shodný s řešením silnostěnných nádob:
𝜑𝜑(𝑚𝑚) = 𝐶𝐶1 ∙ 𝑚𝑚 +𝐶𝐶2
𝑚𝑚 .
Pro stanovení integračních konstant musíme sestavit dvě okrajové podmínky:
1. 𝑚𝑚 = 𝑟𝑟1: 𝜎𝜎𝑜𝑜(𝑟𝑟1) = −𝑀𝑀𝑊𝑊𝑑𝑑
= −6 ∙ 𝑀𝑀
2 ∙ 𝜋𝜋 ∙ 𝑟𝑟1 ∙ ℎ2 ,
2. 𝑚𝑚 = 𝑟𝑟2: 𝜎𝜎𝑜𝑜(𝑟𝑟2) = 0 . Poznámka: Znaménko „−“ (minus) v první podmínce znamená tlakové radiální napětí na spodní straně desky, ke které jsou obecně vztahovány všechny průběhy napětí.
r2
h r1
qo
r2
h r1
M
A B
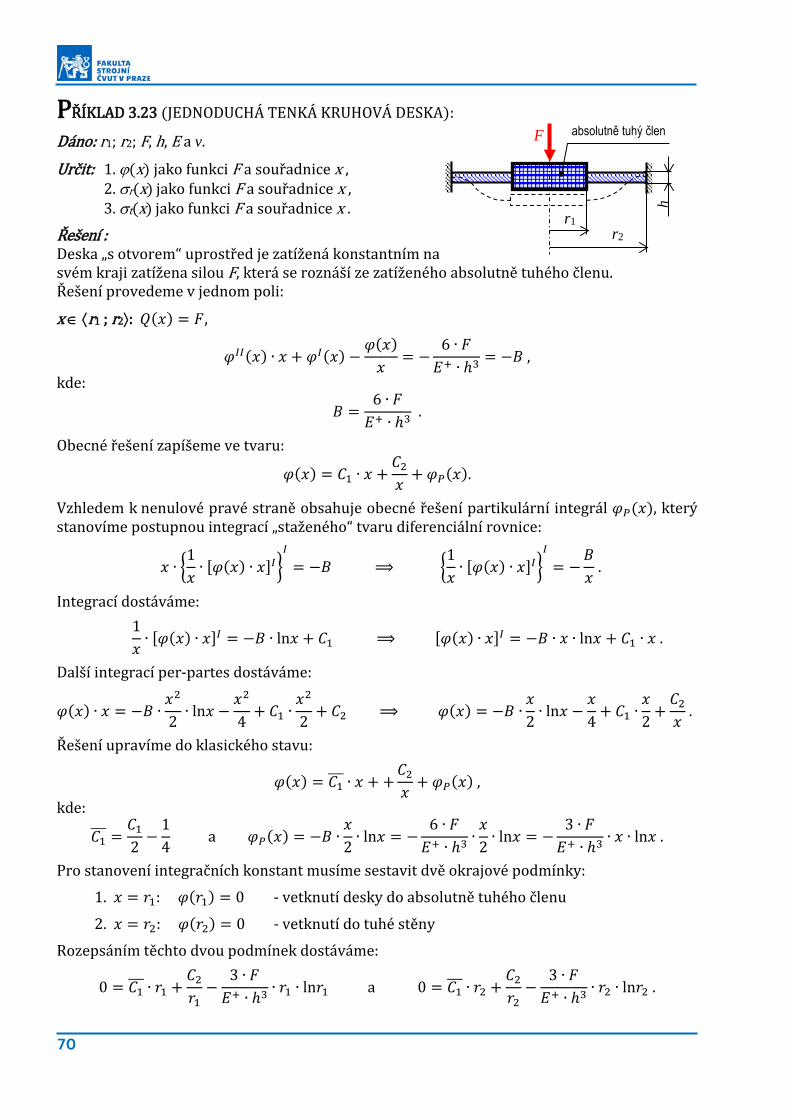
70
PŘÍKLAD 3.23 (JEDNODUCHÁ TENKÁ KRUHOVÁ DESKA):
Dáno: r1; r2; F, h, E a v.
Určit: 1. ϕ(x) jako funkci F a souřadnice x , 2. σr(x) jako funkci F a souřadnice x , 3. σt(x) jako funkci F a souřadnice x .
Řešení : Deska „s otvorem“ uprostřed je zatížená konstantním na svém kraji zatížena silou F, která se roznáší ze zatíženého absolutně tuhého členu. Řešení provedeme v jednom poli:
x ∈ ⟨r1 ; r2⟩: 𝑄𝑄(𝑚𝑚) = 𝐹𝐹,
𝜑𝜑𝐼𝐼𝐼𝐼(𝑚𝑚) ∙ 𝑚𝑚 + 𝜑𝜑𝐼𝐼(𝑚𝑚) −𝜑𝜑(𝑚𝑚)
𝑚𝑚= −
6 ∙ 𝐹𝐹𝐸𝐸+ ∙ ℎ3 = −𝐵𝐵 ,
kde:
𝐵𝐵 =6 ∙ 𝐹𝐹
𝐸𝐸+ ∙ ℎ3 .
Obecné řešení zapíšeme ve tvaru:
𝜑𝜑(𝑚𝑚) = 𝐶𝐶1 ∙ 𝑚𝑚 +𝐶𝐶2
𝑚𝑚+ 𝜑𝜑𝑃𝑃(𝑚𝑚).
Vzhledem k nenulové pravé straně obsahuje obecné řešení partikulární integrál 𝜑𝜑𝑃𝑃(𝑚𝑚), který stanovíme postupnou integrací „staženého“ tvaru diferenciální rovnice:
𝑚𝑚 ∙ �1𝑚𝑚
∙ [𝜑𝜑(𝑚𝑚) ∙ 𝑚𝑚]𝐼𝐼�𝐼𝐼
= −𝐵𝐵 ⟹ �1𝑚𝑚
∙ [𝜑𝜑(𝑚𝑚) ∙ 𝑚𝑚]𝐼𝐼�𝐼𝐼
= −𝐵𝐵𝑚𝑚
.
Integrací dostáváme: 1𝑚𝑚
∙ [𝜑𝜑(𝑚𝑚) ∙ 𝑚𝑚]𝐼𝐼 = −𝐵𝐵 ∙ ln𝑚𝑚 + 𝐶𝐶1 ⟹ [𝜑𝜑(𝑚𝑚) ∙ 𝑚𝑚]𝐼𝐼 = −𝐵𝐵 ∙ 𝑚𝑚 ∙ ln𝑚𝑚 + 𝐶𝐶1 ∙ 𝑚𝑚 .
Další integrací per-partes dostáváme:
𝜑𝜑(𝑚𝑚) ∙ 𝑚𝑚 = −𝐵𝐵 ∙𝑚𝑚2
2∙ ln𝑚𝑚 −
𝑚𝑚2
4+ 𝐶𝐶1 ∙
𝑚𝑚2
2+ 𝐶𝐶2 ⟹ 𝜑𝜑(𝑚𝑚) = −𝐵𝐵 ∙
𝑚𝑚2
∙ ln𝑚𝑚 −𝑚𝑚4
+ 𝐶𝐶1 ∙𝑚𝑚2
+𝐶𝐶2
𝑚𝑚 .
Řešení upravíme do klasického stavu:
𝜑𝜑(𝑚𝑚) = 𝐶𝐶1��� ∙ 𝑚𝑚 + +𝐶𝐶2
𝑚𝑚+ 𝜑𝜑𝑃𝑃(𝑚𝑚) ,
kde:
𝐶𝐶1��� =𝐶𝐶1
2−
14
a 𝜑𝜑𝑃𝑃(𝑚𝑚) = −𝐵𝐵 ∙𝑚𝑚2
∙ ln𝑚𝑚 = −6 ∙ 𝐹𝐹
𝐸𝐸+ ∙ ℎ3 ∙𝑚𝑚2
∙ ln𝑚𝑚 = −3 ∙ 𝐹𝐹
𝐸𝐸+ ∙ ℎ3 ∙ 𝑚𝑚 ∙ ln𝑚𝑚 .
Pro stanovení integračních konstant musíme sestavit dvě okrajové podmínky:
1. 𝑚𝑚 = 𝑟𝑟1: 𝜑𝜑(𝑟𝑟1) = 0 - vetknutí desky do absolutně tuhého členu
2. 𝑚𝑚 = 𝑟𝑟2: 𝜑𝜑(𝑟𝑟2) = 0 - vetknutí do tuhé stěny
Rozepsáním těchto dvou podmínek dostáváme:
0 = 𝐶𝐶1��� ∙ 𝑟𝑟1 +𝐶𝐶2
𝑟𝑟1−
3 ∙ 𝐹𝐹𝐸𝐸+ ∙ ℎ3 ∙ 𝑟𝑟1 ∙ ln𝑟𝑟1 a 0 = 𝐶𝐶1��� ∙ 𝑟𝑟2 +
𝐶𝐶2
𝑟𝑟2−
3 ∙ 𝐹𝐹𝐸𝐸+ ∙ ℎ3 ∙ 𝑟𝑟2 ∙ ln𝑟𝑟2 .
r1 r2
F
h
absolutně tuhý člen
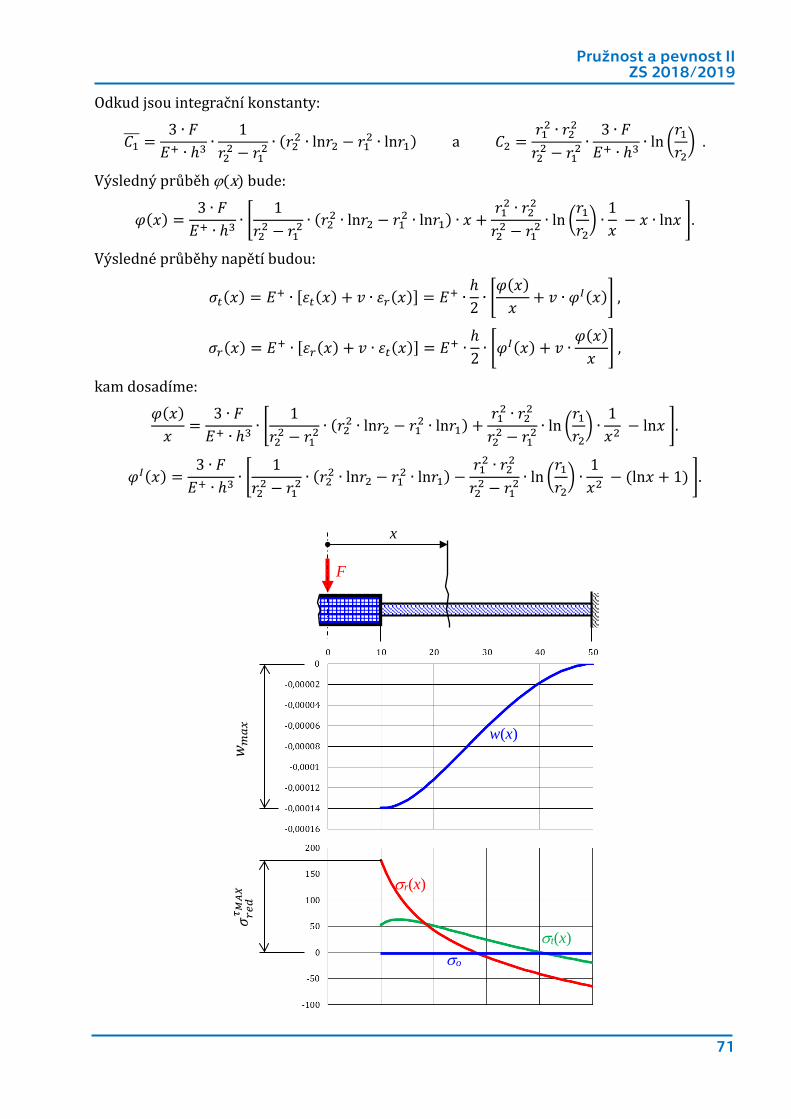
Pružnost a pevnost II ZS 2018/2019
71
Odkud jsou integrační konstanty:
𝐶𝐶1��� =3 ∙ 𝐹𝐹
𝐸𝐸+ ∙ ℎ3 ∙1
𝑟𝑟22 − 𝑟𝑟1
2 ∙ (𝑟𝑟22 ∙ ln𝑟𝑟2 − 𝑟𝑟1
2 ∙ ln𝑟𝑟1) a 𝐶𝐶2 =𝑟𝑟1
2 ∙ 𝑟𝑟22
𝑟𝑟22 − 𝑟𝑟1
2 ∙3 ∙ 𝐹𝐹
𝐸𝐸+ ∙ ℎ3 ∙ ln �𝑟𝑟1
𝑟𝑟2� .
Výsledný průběh ϕ(x) bude:
𝜑𝜑(𝑚𝑚) =3 ∙ 𝐹𝐹
𝐸𝐸+ ∙ ℎ3 ∙ �1
𝑟𝑟22 − 𝑟𝑟1
2 ∙ (𝑟𝑟22 ∙ ln𝑟𝑟2 − 𝑟𝑟1
2 ∙ ln𝑟𝑟1) ∙ 𝑚𝑚 +𝑟𝑟1
2 ∙ 𝑟𝑟22
𝑟𝑟22 − 𝑟𝑟1
2 ∙ ln �𝑟𝑟1
𝑟𝑟2� ∙
1𝑚𝑚
− 𝑚𝑚 ∙ ln𝑚𝑚 �.
Výsledné průběhy napětí budou:
𝜎𝜎𝑒𝑒(𝑚𝑚) = 𝐸𝐸+ ∙ [𝜀𝜀𝑒𝑒(𝑚𝑚) + 𝑣𝑣 ∙ 𝜀𝜀𝑜𝑜(𝑚𝑚)] = 𝐸𝐸+ ∙ℎ2
∙ �𝜑𝜑(𝑚𝑚)
𝑚𝑚+ 𝑣𝑣 ∙ 𝜑𝜑𝐼𝐼(𝑚𝑚)� ,
𝜎𝜎𝑜𝑜(𝑚𝑚) = 𝐸𝐸+ ∙ [𝜀𝜀𝑜𝑜(𝑚𝑚) + 𝑣𝑣 ∙ 𝜀𝜀𝑒𝑒(𝑚𝑚)] = 𝐸𝐸+ ∙ℎ2
∙ �𝜑𝜑𝐼𝐼(𝑚𝑚) + 𝑣𝑣 ∙𝜑𝜑(𝑚𝑚)
𝑚𝑚� ,
kam dosadíme:
𝜑𝜑(𝑚𝑚)𝑚𝑚
=3 ∙ 𝐹𝐹
𝐸𝐸+ ∙ ℎ3 ∙ �1
𝑟𝑟22 − 𝑟𝑟1
2 ∙ (𝑟𝑟22 ∙ ln𝑟𝑟2 − 𝑟𝑟1
2 ∙ ln𝑟𝑟1) +𝑟𝑟1
2 ∙ 𝑟𝑟22
𝑟𝑟22 − 𝑟𝑟1
2 ∙ ln �𝑟𝑟1
𝑟𝑟2� ∙
1𝑚𝑚2 − ln𝑚𝑚 �.
𝜑𝜑𝐼𝐼(𝑚𝑚) =3 ∙ 𝐹𝐹
𝐸𝐸+ ∙ ℎ3 ∙ �1
𝑟𝑟22 − 𝑟𝑟1
2 ∙ (𝑟𝑟22 ∙ ln𝑟𝑟2 − 𝑟𝑟1
2 ∙ ln𝑟𝑟1) −𝑟𝑟1
2 ∙ 𝑟𝑟22
𝑟𝑟22 − 𝑟𝑟1
2 ∙ ln �𝑟𝑟1
𝑟𝑟2� ∙
1𝑚𝑚2 − (ln𝑚𝑚 + 1) �.
F
w(x)
σt(x) σo
σr(x)
𝜎𝜎 𝑜𝑜𝑐𝑐𝑑𝑑
𝜏𝜏 𝑀𝑀𝐴𝐴
𝑀𝑀
𝑤𝑤𝑚𝑚
𝑚𝑚𝑚𝑚
x

72
PŘÍKLAD 3.24 (SLOŽENÁ TENKÁ KRUHOVÁ DESKA – 2 POLE):
Dáno: q0; r1; r2; h; E a ν. Určit: - rozdělit desku na příslušný počet polí - sestavit diferenciální rovnice pro jednotlivá pole - napsat obecná řešení jednotlivých rovnic - napsat odpovídající počet okrajových podmínek
Řešení: Nejprve desku rozdělíme na dvě pole podle měnícího se příčného zatížení:
Pole I: x∈⟨0 ; r1⟩: 20I )( xqxQ ⋅⋅= π
Pole II: x∈⟨ r1 ; r2⟩: 210II )( rqxQ ⋅⋅= π
Na základě tohoto rozdělení musíme sestavit dvě diferenciální rovnice:
I) 23
0III
6)()()( xhE
qxxxxx ⋅
⋅⋅⋅⋅
−=−′+′′⋅ +ππϕϕϕ ,
II) 213
0IIIIII
6)()()( rhE
qx
xxxx ⋅⋅⋅⋅⋅
−=−′+′′⋅ +ππϕϕϕ .
Protože diferenciální rovnice obsahují pravou stranu, budou mít obě řešení jak homogenní část obsahující celkem 4 integrační konstanty C1 ÷ C4, tak také partikulární řešení:
I) )()( I2
1I xx
CxCx Pϕϕ ++⋅= ,
II) )()( II4
3II xx
CxCx Pϕϕ ++⋅= .
Ke stanovení partikulárních řešení buď použijeme znalosti z matematiky diferenciálních rovnic anebo využijeme tzv. stažený tvar diferenciální rovnice a jeho postupnou integrací a následným zjednodušováním určíme tvar partikulárních řešení.
Poznámka: Paradoxně jednodušší by bylo partikulární řešení I. rovnice, kde PSI = f(x2) než II. rovnice, kde PSII = konst.: Vycházelo by: 𝜑𝜑I𝑃𝑃(𝑚𝑚) = 𝑓𝑓(𝑚𝑚3), ale 𝜑𝜑I𝑃𝑃(𝑚𝑚) = 𝑓𝑓(𝑚𝑚 ∙ ln𝑚𝑚).
Pro výpočet 4 integračních konstant C1 ÷ C4 je třeba sestavit 4 okrajové podmínky:
1) x = 0 ϕI = 0 uprostřed desky musí být nulové natočení Tuto podmínku lze také zaměnit ze podmínku σt(0) = σr(0), která vychází z předpokladu, že statická rovnováha středového bodu musí být zachována)
2) x = r1 ϕI(r1) = ϕII(r1) průhybová plocha musí být ve spojení obou polí hladká Toto je naprosto univerzální podmínka, která se ve spojení dvou polí kontinuální desky, ale třeba i nosníku zaručuje hladkost plochy nebo průhybové čáry u nosníků
3) x = r1 σr I(r1) = σr II(r1) v místě spojení obou polí nepůsobí žádný vnější moment Toto je vlastně statická momentová podmínka, kdy se v obecném místě, v němž nepůsobí žádný ohybový moment, musí velikost momentu „zleva“ musí rovnat velikosti momentu „zprava“
4) x = r2 σr II(r2)= 0 na nezatíženém volném kraji desky není žádné radiální napětí Na volném kraji bez zatížení neexistuje nic, co by vytvářelo rovnováhu s případným vnitřním radiálním napětím, a proto toto napětí musí být nulové.
r2
h r1
qo
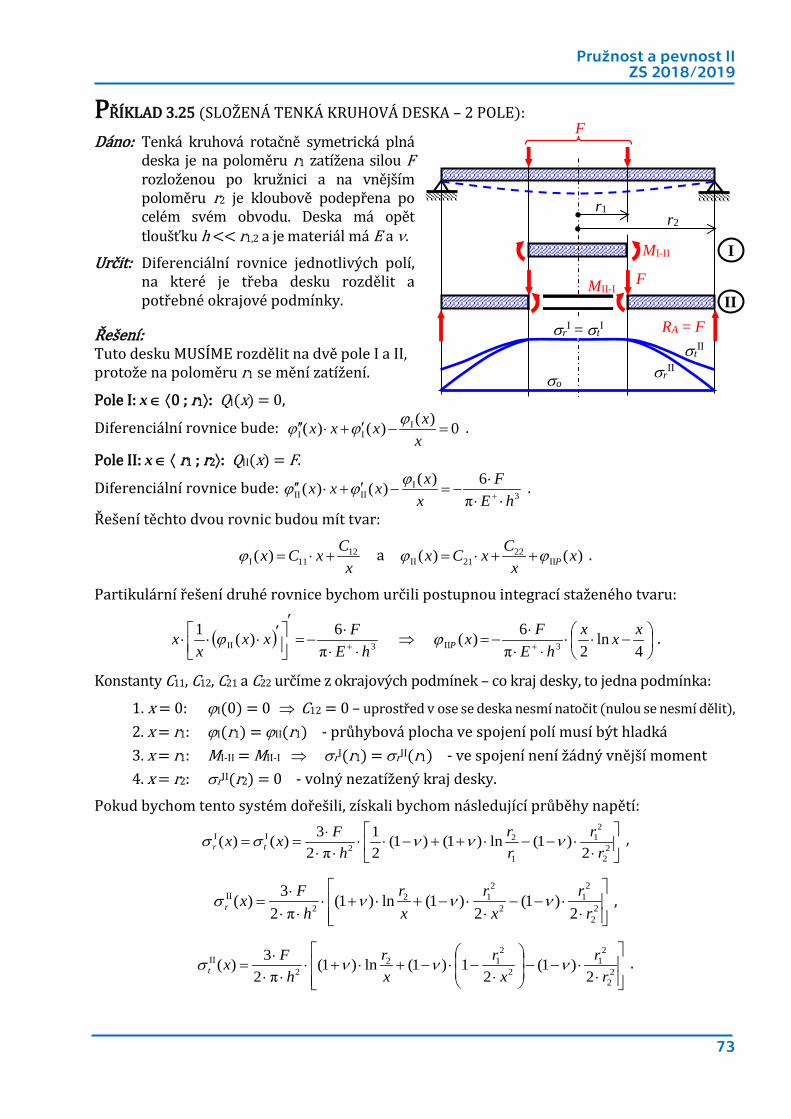
Pružnost a pevnost II ZS 2018/2019
73
PŘÍKLAD 3.25 (SLOŽENÁ TENKÁ KRUHOVÁ DESKA – 2 POLE):
Dáno: Tenká kruhová rotačně symetrická plná deska je na poloměru r1 zatížena silou F rozloženou po kružnici a na vnějším poloměru r2 je kloubově podepřena po celém svém obvodu. Deska má opět tloušťku h << r1,2 a je materiál má E a ν.
Určit: Diferenciální rovnice jednotlivých polí, na které je třeba desku rozdělit a potřebné okrajové podmínky.
Řešení: Tuto desku MUSÍME rozdělit na dvě pole I a II, protože na poloměru r1 se mění zatížení.
Pole I: x ∈ ⟨0 ; r1⟩: QI(x) = 0,
Diferenciální rovnice bude: 0)()()( III =−′+⋅′′
xxxxx ϕϕϕ .
Pole II: x ∈ ⟨ r1 ; r2⟩: QII(x) = F.
Diferenciální rovnice bude: 3I
IIII π6)()()(
hEF
xxxxx
⋅⋅⋅
−=−′+⋅′′+
ϕϕϕ .
Řešení těchto dvou rovnic budou mít tvar:
xCxCx 12
11I )( +⋅=ϕ a )()( II22
21II xx
CxCx Pϕϕ ++⋅= .
Partikulární řešení druhé rovnice bychom určili postupnou integrací staženého tvaru:
( ) 3II π6)(1
hEFxx
xx
⋅⋅⋅
−=′
′⋅⋅⋅ +ϕ ⇒
−⋅⋅
⋅⋅⋅
−= + 4ln
2π6)( 3II
xxxhE
FxPϕ .
Konstanty C11, C12, C21 a C22 určíme z okrajových podmínek – co kraj desky, to jedna podmínka:
1. x = 0: ϕI(0) = 0 ⇒ C12 = 0 – uprostřed v ose se deska nesmí natočit (nulou se nesmí dělit), 2. x = r1: ϕI(r1) = ϕII(r1) - průhybová plocha ve spojení polí musí být hladká 3. x = r1: MI-II = MII-I ⇒ σrI(r1) = σrII(r1) - ve spojení není žádný vnější moment 4. x = r2: σrII(r2) = 0 - volný nezatížený kraj desky.
Pokud bychom tento systém dořešili, získali bychom následující průběhy napětí:
⋅
⋅−−⋅++−⋅⋅⋅⋅
⋅== 2
2
21
1
22
II
2)1(ln)1()1(
21
π23)()(
rr
rr
hFxx tr νννσσ ,
⋅⋅−−
⋅⋅−+⋅+⋅
⋅⋅⋅
= 22
21
2
212
2II
2)1(
2)1(ln)1(
π23)(
rr
xr
xr
hFxr νννσ ,
⋅⋅−−
⋅−⋅−+⋅+⋅
⋅⋅⋅
= 22
21
2
212
2II
2)1(
21)1(ln)1(
π23)(
rr
xr
xr
hFxt νννσ .
I
II
F
r1 r2
MI-II
MII-I F
RA = F σt
II
σrII
σrI = σt
I
σo
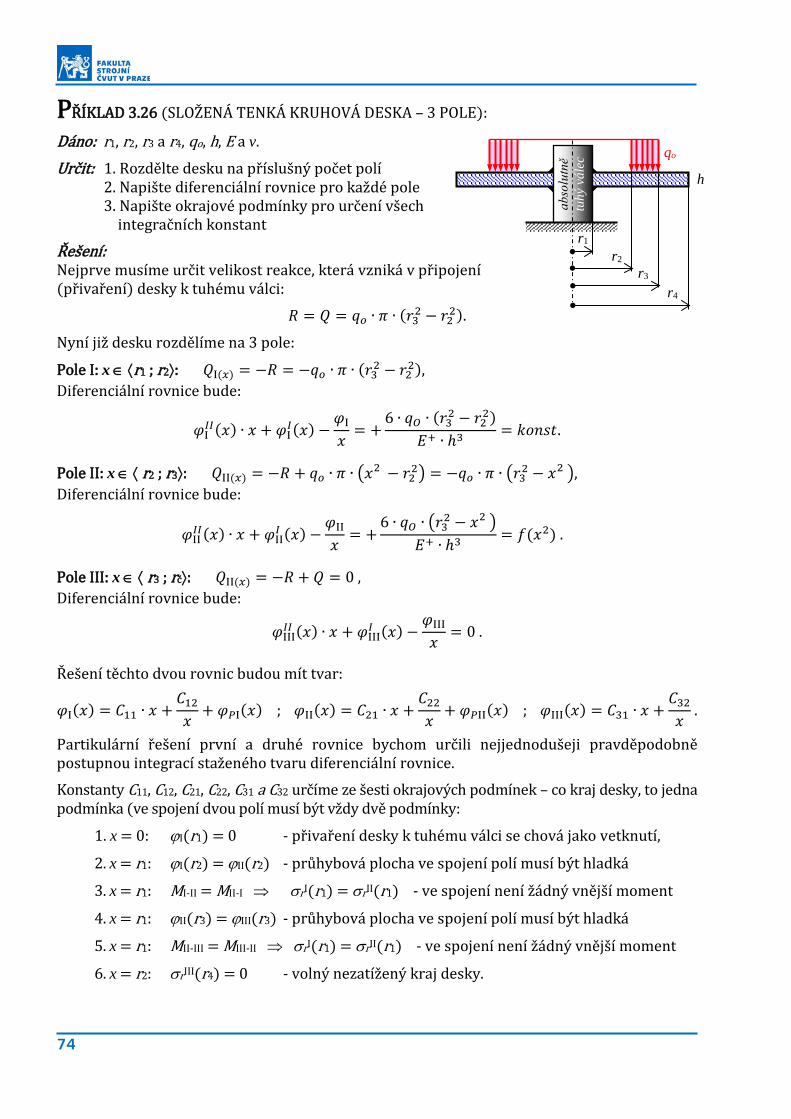
74
PŘÍKLAD 3.26 (SLOŽENÁ TENKÁ KRUHOVÁ DESKA – 3 POLE):
Dáno: r1, r2, r3 a r4, qo, h, E a v.
Určit: 1. Rozdělte desku na příslušný počet polí 2. Napište diferenciální rovnice pro každé pole 3. Napište okrajové podmínky pro určení všech integračních konstant
Řešení: Nejprve musíme určit velikost reakce, která vzniká v připojení (přivaření) desky k tuhému válci:
𝑅𝑅 = 𝑄𝑄 = 𝑞𝑞𝑑𝑑 ∙ 𝜋𝜋 ∙ (𝑟𝑟32 − 𝑟𝑟2
2).
Nyní již desku rozdělíme na 3 pole:
Pole I: x ∈ ⟨r1 ; r2⟩: 𝑄𝑄I(𝑚𝑚) = −𝑅𝑅 = −𝑞𝑞𝑑𝑑 ∙ 𝜋𝜋 ∙ (𝑟𝑟32 − 𝑟𝑟2
2), Diferenciální rovnice bude:
𝜑𝜑I𝐼𝐼𝐼𝐼(𝑚𝑚) ∙ 𝑚𝑚 + 𝜑𝜑I
𝐼𝐼(𝑚𝑚) −𝜑𝜑I
𝑚𝑚= +
6 ∙ 𝑞𝑞𝑂𝑂 ∙ (𝑟𝑟32 − 𝑟𝑟2
2)𝐸𝐸+ ∙ ℎ3 = 𝑘𝑘𝑘𝑘𝑚𝑚𝑑𝑑𝐾𝐾.
Pole II: x ∈ ⟨ r2 ; r3⟩: 𝑄𝑄II(𝑚𝑚) = −𝑅𝑅 + 𝑞𝑞𝑑𝑑 ∙ 𝜋𝜋 ∙ �𝑚𝑚2 − 𝑟𝑟22� = −𝑞𝑞𝑑𝑑 ∙ 𝜋𝜋 ∙ �𝑟𝑟3
2 − 𝑚𝑚2 �, Diferenciální rovnice bude:
𝜑𝜑II𝐼𝐼𝐼𝐼(𝑚𝑚) ∙ 𝑚𝑚 + 𝜑𝜑II
𝐼𝐼 (𝑚𝑚) −𝜑𝜑II
𝑚𝑚= +
6 ∙ 𝑞𝑞𝑂𝑂 ∙ �𝑟𝑟32 − 𝑚𝑚2 �
𝐸𝐸+ ∙ ℎ3 = 𝑓𝑓(𝑚𝑚2) .
Pole III: x ∈ ⟨ r3 ; rč⟩: 𝑄𝑄II(𝑚𝑚) = −𝑅𝑅 + 𝑄𝑄 = 0 , Diferenciální rovnice bude:
𝜑𝜑III𝐼𝐼𝐼𝐼 (𝑚𝑚) ∙ 𝑚𝑚 + 𝜑𝜑III
𝐼𝐼 (𝑚𝑚) −𝜑𝜑III
𝑚𝑚= 0 .
Řešení těchto dvou rovnic budou mít tvar:
𝜑𝜑I(𝑚𝑚) = 𝐶𝐶11 ∙ 𝑚𝑚 +𝐶𝐶12
𝑚𝑚+ 𝜑𝜑𝑃𝑃I(𝑚𝑚) ; 𝜑𝜑II(𝑚𝑚) = 𝐶𝐶21 ∙ 𝑚𝑚 +
𝐶𝐶22
𝑚𝑚+ 𝜑𝜑𝑃𝑃II(𝑚𝑚) ; 𝜑𝜑III(𝑚𝑚) = 𝐶𝐶31 ∙ 𝑚𝑚 +
𝐶𝐶32
𝑚𝑚 .
Partikulární řešení první a druhé rovnice bychom určili nejjednodušeji pravděpodobně postupnou integrací staženého tvaru diferenciální rovnice.
Konstanty C11, C12, C21, C22, C31 a C32 určíme ze šesti okrajových podmínek – co kraj desky, to jedna podmínka (ve spojení dvou polí musí být vždy dvě podmínky:
1. x = 0: ϕI(r1) = 0 - přivaření desky k tuhému válci se chová jako vetknutí,
2. x = r1: ϕI(r2) = ϕII(r2) - průhybová plocha ve spojení polí musí být hladká
3. x = r1: MI-II = MII-I ⇒ σrI(r1) = σrII(r1) - ve spojení není žádný vnější moment
4. x = r1: ϕII(r3) = ϕIII(r3) - průhybová plocha ve spojení polí musí být hladká
5. x = r1: MII-III = MIII-II ⇒ σrI(r1) = σrII(r1) - ve spojení není žádný vnější moment
6. x = r2: σrIII(r4) = 0 - volný nezatížený kraj desky.
r1
r2
r3
r4
h
qo
abso
lutn
ě tu
hý v
álec

Pružnost a pevnost II ZS 2018/2019
75
PŘÍKLAD 3.27 (SLOŽENÁ TENKÁ KRUHOVÁ DESKA – 3 POLE):
Dáno: q0; r1; r2; r3; h; E a ν.
Určit: 1. Rozdělte desku na příslušný počet polí 2. Napište diferenciální rovnice pro každé pole 3. Napište okrajové podmínky pro určení konstant.
Řešení: Nejprve musíme určit velikost reakce, která vzniká v připojení (přivaření) desky k tuhému válci:
𝑅𝑅 = 𝑄𝑄 = 𝑞𝑞𝑑𝑑 ∙ 𝜋𝜋 ∙ 𝑟𝑟12.
Nyní již desku rozdělíme na 3 pole:
Pole I: x ∈ ⟨r1 ; r2⟩: 𝑄𝑄I(𝑚𝑚) = 𝑞𝑞𝑑𝑑 ∙ 𝜋𝜋 ∙ 𝑚𝑚2, Diferenciální rovnice bude:
𝜑𝜑I𝐼𝐼𝐼𝐼(𝑚𝑚) ∙ 𝑚𝑚 + 𝜑𝜑I
𝐼𝐼(𝑚𝑚) −𝜑𝜑I
𝑚𝑚= −
6 ∙ 𝑞𝑞𝑂𝑂 ∙ 𝑚𝑚2
𝐸𝐸+ ∙ ℎ3 = 𝑓𝑓(𝑚𝑚2) .
Pole II: x ∈ ⟨ r2 ; r3⟩: 𝑄𝑄II(𝑚𝑚) = 𝑄𝑄 = 𝑞𝑞𝑑𝑑 ∙ 𝜋𝜋 ∙ 𝑟𝑟12,
Diferenciální rovnice bude:
𝜑𝜑II𝐼𝐼𝐼𝐼(𝑚𝑚) ∙ 𝑚𝑚 + 𝜑𝜑II
𝐼𝐼 (𝑚𝑚) −𝜑𝜑II
𝑚𝑚= −
6 ∙ 𝑞𝑞𝑂𝑂 ∙ 𝑟𝑟12
𝐸𝐸+ ∙ ℎ3 = 𝑘𝑘𝑘𝑘𝑚𝑚𝑑𝑑𝐾𝐾.
Pole III: x ∈ ⟨ r3 ; rč⟩: 𝑄𝑄II(𝑚𝑚) = 𝑄𝑄 − 𝑅𝑅 = 0 , Diferenciální rovnice bude:
𝜑𝜑III𝐼𝐼𝐼𝐼 (𝑚𝑚) ∙ 𝑚𝑚 + 𝜑𝜑III
𝐼𝐼 (𝑚𝑚) −𝜑𝜑III
𝑚𝑚= 0 .
Řešení těchto dvou rovnic budou mít tvar:
𝜑𝜑I(𝑚𝑚) = 𝐶𝐶11 ∙ 𝑚𝑚 +𝐶𝐶12
𝑚𝑚+ 𝜑𝜑𝑃𝑃I(𝑚𝑚) ; 𝜑𝜑II(𝑚𝑚) = 𝐶𝐶21 ∙ 𝑚𝑚 +
𝐶𝐶22
𝑚𝑚+ 𝜑𝜑𝑃𝑃II(𝑚𝑚) ; 𝜑𝜑III(𝑚𝑚) = 𝐶𝐶31 ∙ 𝑚𝑚 +
𝐶𝐶32
𝑚𝑚 .
Partikulární řešení první a druhé rovnice bychom určili nejjednodušeji pravděpodobně postupnou integrací staženého tvaru diferenciální rovnice.
Konstanty C11, C12, C21, C22, C31 a C32 určíme ze šesti okrajových podmínek – co kraj desky, to jedna podmínka (ve spojení dvou polí musí být vždy dvě podmínky:
1. x = 0: ϕI(0) = 0 ⇒ C12 = 0 - uprostřed v ose se deska nesmí natočit (nulou se nesmí dělit),
2. x = r1: ϕI(r1) = ϕII(r1) - průhybová plocha ve spojení polí musí být hladká
3. x = r1: MI-II = MII-I ⇒ σrI(r1) = σrII(r1) - ve spojení není žádný vnější moment
4. x = r1: ϕII(r2) = ϕIII(r2) - průhybová plocha ve spojení polí musí být hladká
5. x = r1: MII-III = MIII-II ⇒ σrI(r1) = σrII(r1) - ve spojení není žádný vnější moment
6. x = r2: σrIII(r3) = 0 - volný nezatížený kraj desky.
r2
h r1
qo
r3
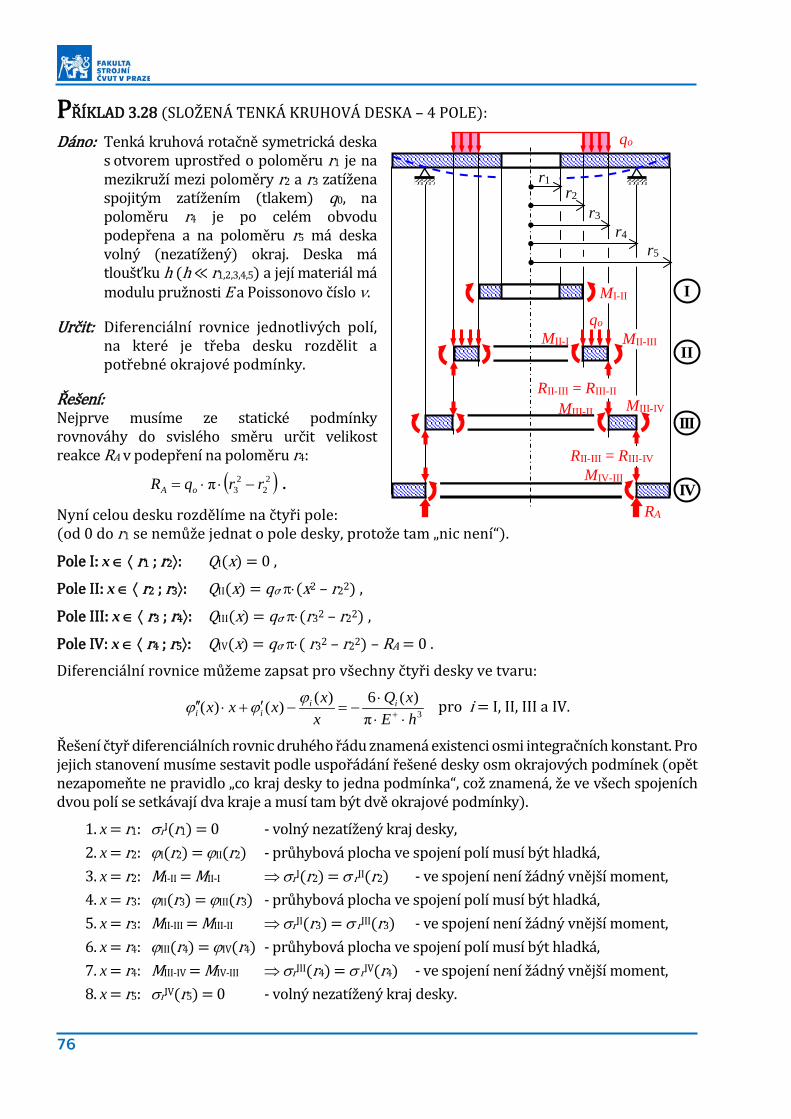
76
PŘÍKLAD 3.28 (SLOŽENÁ TENKÁ KRUHOVÁ DESKA – 4 POLE):
Dáno: Tenká kruhová rotačně symetrická deska s otvorem uprostřed o poloměru r1 je na mezikruží mezi poloměry r2 a r3 zatížena spojitým zatížením (tlakem) q0, na poloměru r4 je po celém obvodu podepřena a na poloměru r5 má deska volný (nezatížený) okraj. Deska má tloušťku h (h ≪ r1,2,3,4,5) a její materiál má modulu pružnosti E a Poissonovo číslo ν.
Určit: Diferenciální rovnice jednotlivých polí, na které je třeba desku rozdělit a potřebné okrajové podmínky.
Řešení: Nejprve musíme ze statické podmínky rovnováhy do svislého směru určit velikost reakce RA v podepření na poloměru r4:
( )22
23π rrqR oA −⋅⋅= .
Nyní celou desku rozdělíme na čtyři pole: (od 0 do r1 se nemůže jednat o pole desky, protože tam „nic není“).
Pole I: x ∈ ⟨ r1 ; r2⟩: QI(x) = 0 ,
Pole II: x ∈ ⟨ r2 ; r3⟩: QII(x) = qo⋅π⋅(x2 – r22) ,
Pole III: x ∈ ⟨ r3 ; r4⟩: QIII(x) = qo⋅π⋅(r32 – r22) ,
Pole IV: x ∈ ⟨ r4 ; r5⟩: QIV(x) = qo⋅π⋅( r32 – r22) – RA = 0 .
Diferenciální rovnice můžeme zapsat pro všechny čtyři desky ve tvaru:
3π)(6)()()(
hExQ
xxxxx ii
ii ⋅⋅⋅
−=−′+⋅′′+
ϕϕϕ pro i = I, II, III a IV.
Řešení čtyř diferenciálních rovnic druhého řádu znamená existenci osmi integračních konstant. Pro jejich stanovení musíme sestavit podle uspořádání řešené desky osm okrajových podmínek (opět nezapomeňte ne pravidlo „co kraj desky to jedna podmínka“, což znamená, že ve všech spojeních dvou polí se setkávají dva kraje a musí tam být dvě okrajové podmínky).
1. x = r1: σrI(r1) = 0 - volný nezatížený kraj desky, 2. x = r2: ϕI(r2) = ϕII(r2) - průhybová plocha ve spojení polí musí být hladká, 3. x = r2: MI-II = MII-I ⇒ σrI(r2) = σ rII(r2) - ve spojení není žádný vnější moment, 4. x = r3: ϕII(r3) = ϕIII(r3) - průhybová plocha ve spojení polí musí být hladká, 5. x = r3: MII-III = MIII-II ⇒ σrII(r3) = σ rIII(r3) - ve spojení není žádný vnější moment, 6. x = r4: ϕIII(r4) = ϕIV(r4) - průhybová plocha ve spojení polí musí být hladká, 7. x = r4: MIII-IV = MIV-III ⇒ σrIII(r4) = σ rIV(r4) - ve spojení není žádný vnější moment, 8. x = r5: σrIV(r5) = 0 - volný nezatížený kraj desky.
MIII-IV
I
II
III
IV
qo
r1 r2
MI-II
RA
RII-III = RIII-II
qo
r3
r4 r5
MII-III
MIII-II
MII-I
MIV-III
RII-III = RIII-IV

Pružnost a pevnost II ZS 2018/2019
77
4. STABILITA PŘÍMÝCH PRUTŮ (VZPĚR) PŘÍKLAD 4.1 (VÝPOČET DOVOLENÉ SÍLY):
Dáno: σK = 260 N⋅mm–2, σu = 200 N⋅mm–2, E = 2,1⋅105 N⋅mm–2, = 0,7 m, ∅d = 30 mm, k = 3,5.
Určit: FD (dovolená síla pro I. případ vzpěru).
Řešení: Nejprve popíšeme geometrii prutu (vzpěry):
• Kvadratický moment kruhového průřezu je:
4min 64
dJ ⋅=π .
• Plocha kruhového průřezu je:
2
4dA ⋅=
π
• Z těchto hodnot dostáváme kvadratický poloměr kruhového průřezu:
44
642
4
minmin
d
d
d
AJi =
⋅
⋅== π
π
.
S využitím kvadratického poloměru průřezu stanovíme štíhlost řešeného prutu jako:
3,933070044
min
=⋅
=⋅
==diλ .
Mezní štíhlost pro I. případ vzpěru stanovená z podmínky σkr = σu je:
9,50200
101,241 522
I.. =
⋅⋅⋅=
⋅⋅=
πσ
πλu
mezEn .
Protože λ > λmez provedeme další výpočet podle Eulerova vztahu pro pružné řešení ztráty stability přímého prutu zatíženého osovou tlakovou silou:
N04542700256
30101,2π256
π64ππ
41π
2
453
2
43
2
42
2min
2I.
1. =⋅
⋅⋅⋅=
⋅⋅⋅
=
⋅⋅⋅⋅=
⋅⋅⋅=
dEdEJEnFkr .
Hledaná dovolená síla při uvažování bezpečnosti k tedy bude:
kN12N013125,304542I.
1. ≈==≤k
FF kr
D .
∅d
FD = ?
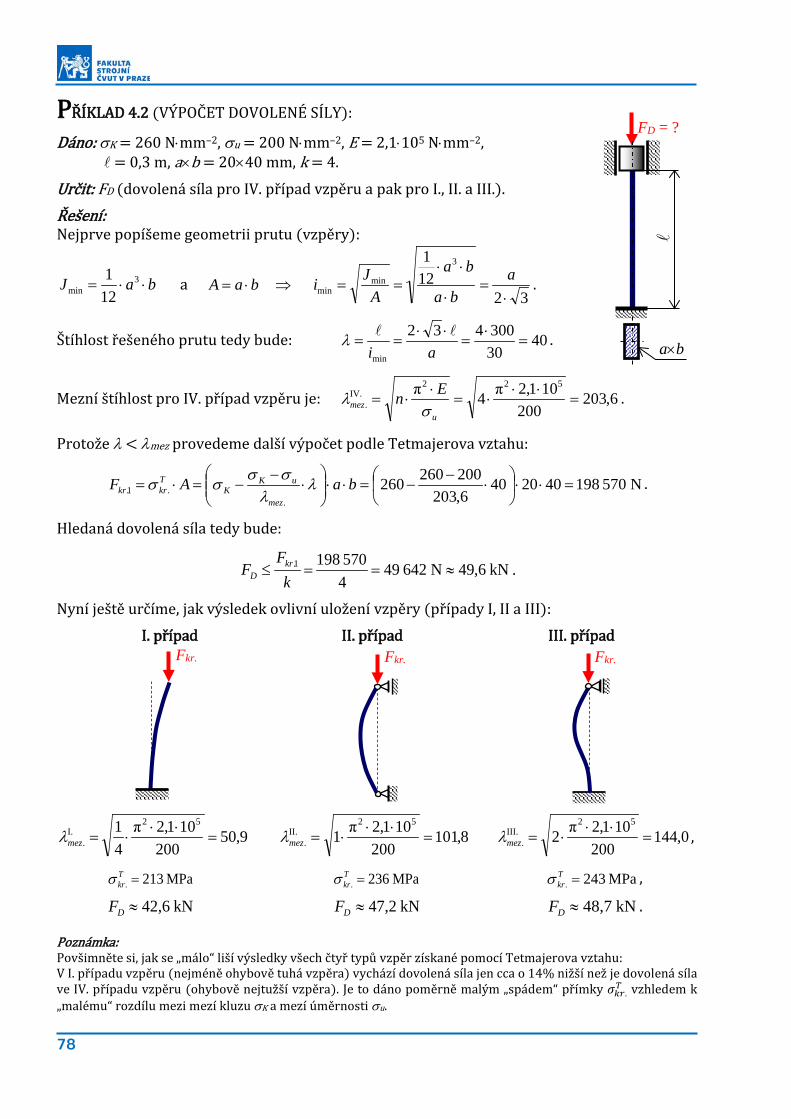
78
PŘÍKLAD 4.2 (VÝPOČET DOVOLENÉ SÍLY):
Dáno: σK = 260 N⋅mm–2, σu = 200 N⋅mm–2, E = 2,1⋅105 N⋅mm–2, = 0,3 m, a×b = 20×40 mm, k = 4.
Určit: FD (dovolená síla pro IV. případ vzpěru a pak pro I., II. a III.). Řešení: Nejprve popíšeme geometrii prutu (vzpěry):
baJ ⋅⋅= 3min 12
1 a baA ⋅= ⇒ 32
121 3
minmin ⋅
=⋅
⋅⋅==
aba
ba
AJi .
Štíhlost řešeného prutu tedy bude: 4030300432
min
=⋅
=⋅⋅
==ai
λ .
Mezní štíhlost pro IV. případ vzpěru je: 6,203200
101,2π4π 522IV.
. =⋅⋅
⋅=⋅
⋅=u
mezEn
σλ .
Protože λ < λmez provedeme další výpočet podle Tetmajerova vztahu:
N5701984020406,203200260260
..1. =⋅⋅
⋅
−−=⋅⋅
⋅
−−=⋅= baAF
mez
uKK
Tkrkr λ
λσσσσ .
Hledaná dovolená síla tedy bude:
kN6,49N6424945701981. ≈==≤
kF
F krD .
Nyní ještě určíme, jak výsledek ovlivní uložení vzpěry (případy I, II a III):
I. případ II. případ III. případ
9,50200
101,2π41 52
I.. =
⋅⋅⋅=mezλ 8,101
200101,2π1
52II.
. =⋅⋅
⋅=mezλ 0,144200
101,2π252
III.. =
⋅⋅⋅=mezλ ,
MPa213. =Tkrσ MPa236. =T
krσ MPa243. =Tkrσ ,
kN42,6 ≈DF kN47,2≈DF kN48,7 ≈DF . Poznámka: Povšimněte si, jak se „málo“ liší výsledky všech čtyř typů vzpěr získané pomocí Tetmajerova vztahu: V I. případu vzpěru (nejméně ohybově tuhá vzpěra) vychází dovolená síla jen cca o 14% nižší než je dovolená síla ve IV. případu vzpěru (ohybově nejtužší vzpěra). Je to dáno poměrně malým „spádem“ přímky 𝜎𝜎𝑐𝑐𝑜𝑜.
𝑇𝑇 vzhledem k „malému“ rozdílu mezi mezí kluzu σK a mezí úměrnosti σu.
Fkr. Fkr. Fkr.
a×b
FD = ?
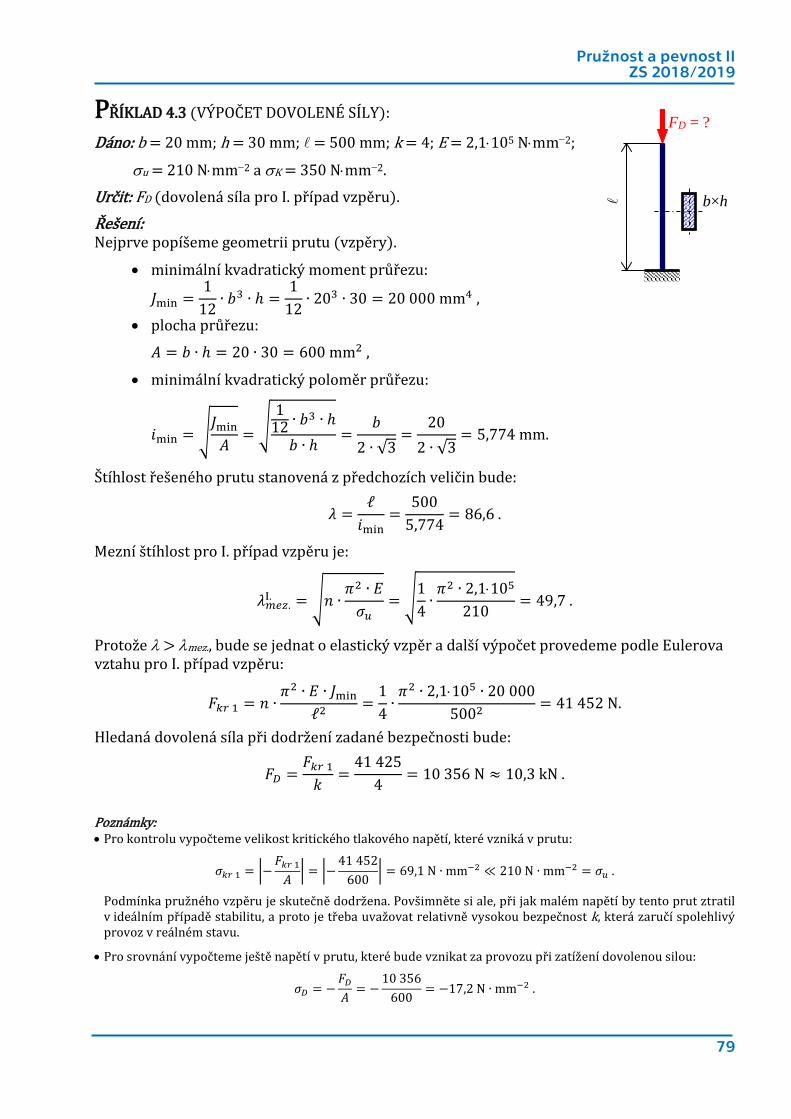
Pružnost a pevnost II ZS 2018/2019
79
PŘÍKLAD 4.3 (VÝPOČET DOVOLENÉ SÍLY):
Dáno: b = 20 mm; h = 30 mm; = 500 mm; k = 4; E = 2,1⋅105 N⋅mm−2;
σu = 210 N⋅mm−2 a σK = 350 N⋅mm−2.
Určit: FD (dovolená síla pro I. případ vzpěru).
Řešení: Nejprve popíšeme geometrii prutu (vzpěry).
• minimální kvadratický moment průřezu:
𝐽𝐽min =1
12∙ 𝑏𝑏3 ∙ ℎ =
112
∙ 203 ∙ 30 = 20 000 mm4 ,
• plocha průřezu:
𝐴𝐴 = 𝑏𝑏 ∙ ℎ = 20 ∙ 30 = 600 mm2 ,
• minimální kvadratický poloměr průřezu:
𝑚𝑚min = �𝐽𝐽min
𝐴𝐴= �
112 ∙ 𝑏𝑏3 ∙ ℎ
𝑏𝑏 ∙ ℎ=
𝑏𝑏2 ∙ √3
=20
2 ∙ √3= 5,774 mm.
Štíhlost řešeného prutu stanovená z předchozích veličin bude:
𝜆𝜆 =ℓ
𝑚𝑚min=
5005,774
= 86,6 .
Mezní štíhlost pro I. případ vzpěru je:
𝜆𝜆𝑚𝑚𝑐𝑐𝑧𝑧.I. = �𝑚𝑚 ∙
𝜋𝜋2 ∙ 𝐸𝐸𝜎𝜎𝑢𝑢
= �14
∙𝜋𝜋2 ∙ 2,1⋅105
210= 49,7 .
Protože λ > λmez., bude se jednat o elastický vzpěr a další výpočet provedeme podle Eulerova vztahu pro I. případ vzpěru:
𝐹𝐹𝑐𝑐𝑜𝑜 1 = 𝑚𝑚 ∙𝜋𝜋2 ∙ 𝐸𝐸 ∙ 𝐽𝐽min
ℓ2 =14
∙𝜋𝜋2 ∙ 2,1⋅105 ∙ 20 000
5002 = 41 452 N.
Hledaná dovolená síla při dodržení zadané bezpečnosti bude:
𝐹𝐹𝐷𝐷 =𝐹𝐹𝑐𝑐𝑜𝑜 1
𝑘𝑘=
41 4254
= 10 356 N ≈ 10,3 kN .
Poznámky: • Pro kontrolu vypočteme velikost kritického tlakového napětí, které vzniká v prutu:
𝜎𝜎𝑐𝑐𝑜𝑜 1 = �−𝐹𝐹𝑐𝑐𝑜𝑜 1
𝐴𝐴� = �−
41 452600
� = 69,1 N ∙ mm−2 ≪ 210 N ∙ mm−2 = 𝜎𝜎𝑢𝑢 .
Podmínka pružného vzpěru je skutečně dodržena. Povšimněte si ale, při jak malém napětí by tento prut ztratil v ideálním případě stabilitu, a proto je třeba uvažovat relativně vysokou bezpečnost k, která zaručí spolehlivý provoz v reálném stavu.
• Pro srovnání vypočteme ještě napětí v prutu, které bude vznikat za provozu při zatížení dovolenou silou:
𝜎𝜎𝐷𝐷 = −𝐹𝐹𝐷𝐷
𝐴𝐴= −
10 356600
= −17,2 N ∙ mm−2 .
FD = ?
b×h
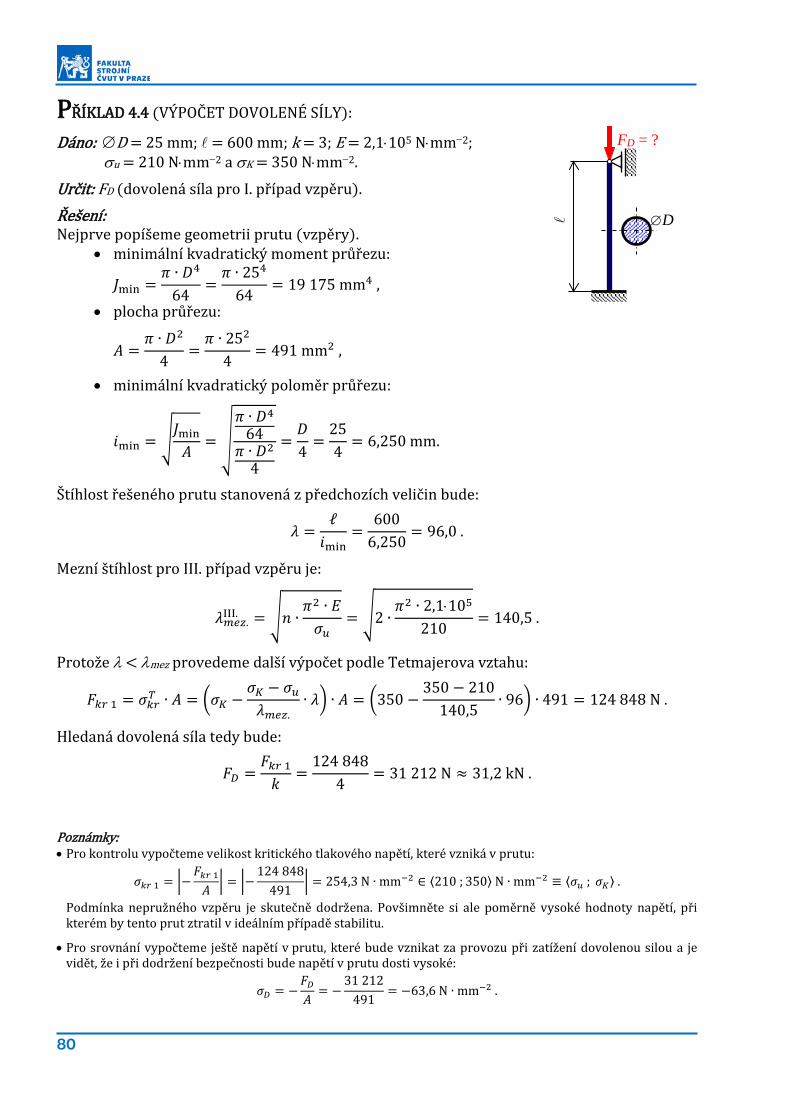
80
PŘÍKLAD 4.4 (VÝPOČET DOVOLENÉ SÍLY):
Dáno: ∅D = 25 mm; = 600 mm; k = 3; E = 2,1⋅105 N⋅mm−2; σu = 210 N⋅mm−2 a σK = 350 N⋅mm−2.
Určit: FD (dovolená síla pro I. případ vzpěru).
Řešení: Nejprve popíšeme geometrii prutu (vzpěry).
• minimální kvadratický moment průřezu:
𝐽𝐽min =𝜋𝜋 ∙ 𝐷𝐷4
64=
𝜋𝜋 ∙ 254
64= 19 175 mm4 ,
• plocha průřezu:
𝐴𝐴 =𝜋𝜋 ∙ 𝐷𝐷2
4=
𝜋𝜋 ∙ 252
4= 491 mm2 ,
• minimální kvadratický poloměr průřezu:
𝑚𝑚min = �𝐽𝐽min
𝐴𝐴= �
𝜋𝜋 ∙ 𝐷𝐷4
64𝜋𝜋 ∙ 𝐷𝐷2
4
=𝐷𝐷4
=254
= 6,250 mm.
Štíhlost řešeného prutu stanovená z předchozích veličin bude:
𝜆𝜆 =ℓ
𝑚𝑚min=
6006,250
= 96,0 .
Mezní štíhlost pro III. případ vzpěru je:
𝜆𝜆𝑚𝑚𝑐𝑐𝑧𝑧.III. = �𝑚𝑚 ∙
𝜋𝜋2 ∙ 𝐸𝐸𝜎𝜎𝑢𝑢
= �2 ∙𝜋𝜋2 ∙ 2,1⋅105
210= 140,5 .
Protože λ < λmez provedeme další výpočet podle Tetmajerova vztahu:
𝐹𝐹𝑐𝑐𝑜𝑜 1 = 𝜎𝜎𝑐𝑐𝑜𝑜𝑇𝑇 ∙ 𝐴𝐴 = �𝜎𝜎𝐾𝐾 −
𝜎𝜎𝐾𝐾 − 𝜎𝜎𝑢𝑢
𝜆𝜆𝑚𝑚𝑐𝑐𝑧𝑧.∙ 𝜆𝜆� ∙ 𝐴𝐴 = �350 −
350 − 210140,5
∙ 96� ∙ 491 = 124 848 N .
Hledaná dovolená síla tedy bude:
𝐹𝐹𝐷𝐷 =𝐹𝐹𝑐𝑐𝑜𝑜 1
𝑘𝑘=
124 8484
= 31 212 N ≈ 31,2 kN .
Poznámky: • Pro kontrolu vypočteme velikost kritického tlakového napětí, které vzniká v prutu:
𝜎𝜎𝑐𝑐𝑜𝑜 1 = �−𝐹𝐹𝑐𝑐𝑜𝑜 1
𝐴𝐴� = �−
124 848491
� = 254,3 N ∙ mm−2 ∈ ⟨210 ; 350⟩ N ∙ mm−2 ≡ ⟨𝜎𝜎𝑢𝑢 ; 𝜎𝜎𝐾𝐾⟩ .
Podmínka nepružného vzpěru je skutečně dodržena. Povšimněte si ale poměrně vysoké hodnoty napětí, při kterém by tento prut ztratil v ideálním případě stabilitu.
• Pro srovnání vypočteme ještě napětí v prutu, které bude vznikat za provozu při zatížení dovolenou silou a je vidět, že i při dodržení bezpečnosti bude napětí v prutu dosti vysoké:
𝜎𝜎𝐷𝐷 = −𝐹𝐹𝐷𝐷
𝐴𝐴= −
31 212491
= −63,6 N ∙ mm−2 .
FD = ?
∅D

Pružnost a pevnost II ZS 2018/2019
81
PŘÍKLAD 4.5 (DIMENZOVÁNÍ VZPĚRY):
Dáno: σK = 280 N⋅mm–2, σu = 210 N⋅mm–2, E = 2,1⋅105 N⋅mm–2, = 0,5 m, F = 300 kN, k = 3,5.
Určit: ∅d (potřebný průměr tyče pro III. Případ vzpěru).
Řešení: Řešení úlohy provedeme v několika krocích:
0. KROK: POPIS GEOMETRIE ŘEŠENÉHO PRUTU
Pro další výpočty vyjádříme všechny potřebné geometrické charakteristiky prutu jako funkce hledaného rozměru d:
• kvadratický moment průřezu:
44
min 0491,064
π ddJ ⋅≈⋅
= ,
• plochu průřezu: 2
2
7854,04
π ddA ⋅≈⋅
= ,
• kvadratický poloměr průřezu:
dA
Ji ⋅== 25,0minmin
Pomocí kvadratického poloměru a délky prutu stanovíme štíhlost řešeného prutu:
di5004
min
⋅==
λ
Mezní štíhlost pro III. případ vzpěru stanovená z podmínky σkr = σu je:
5,140π2III.
. =⋅
⋅=u
mezEn
σλ .
1. KROK: NÁVRH PODLE EULEROVA VZTAHU PRO III. PŘÍPAD VZPĚRU
Nejprve budeme předpokládat vznik pružného vzpěru, a proto první návrh průřezu prutu provedeme podle Eulerova vztahu:
FkJEFkr ⋅=⋅⋅
⋅= 2min
2III.
1.π2
.
V tomto vztahu se vyskytuje jediná neznámá (průměr d), která je obsažena v kvadratickém momentu průřezu. Proto musí současně platit:
42
2
min 0491,0π2 Ed
EFkJ ⋅=
⋅⋅⋅⋅
=
.
Odkud již dostáváme hledaný rozměr podle Eulerova vztahu:
mm1,46101,2π0491,02
5000003005,3π0491,02
452
2
42
2
=⋅⋅⋅⋅
⋅⋅=
⋅⋅⋅⋅⋅
=E
Fkd E .
∅d
F

82
2. KROK: KONTROLA PLATNOSTI EULEROVA VZTAHU
Nyní se musíme přesvědčit, zda byla splněna podmínka použitelnosti Eulerova vztahu. Kontrola se dá provést dvojím způsobem:
a) primární kontrola by měla být přes napětí, zda je splněna podmínka 𝜎𝜎𝑐𝑐𝑜𝑜.𝐸𝐸 ≤ 𝜎𝜎𝑢𝑢:
2-2. mmN1,629
7854,00003005,3
⋅=⋅
⋅=
⋅=
EE
Ekr dA
Fkσ .
b) alternativní podmínka pro platnost Eulerova vztahu je přes štíhlost 𝜆𝜆𝐸𝐸 ≥ 𝜆𝜆𝑚𝑚𝑐𝑐𝑧𝑧 :
4,431,46
00025004
min
≈=⋅
==EE
E diλ
Protože 𝜎𝜎𝑐𝑐𝑜𝑜.𝐸𝐸 > 𝜎𝜎𝑢𝑢, resp. λE < λmez není možné použít při dimenzování vztahy pro
pružný rozsah (Eulerův vztah) a JE tedy třeba dále provést přepočet pomocí vztahů platných pro nepružný rozsah (např. Tetmajerův vztah).
3. KROK: PŘEPOČET PODLE TETMAJERA Kritické Tetmajerovo napětí je dáno vztahem:
⋅
−−= λ
λσσ
σσ.
.mez
uKK
Tkr
a současně musí platit vztah pro tlakové napětí při dodržení zadané bezpečnosti:
AFkT
kr⋅
=.σ .
Spojením těchto rovnic a dosazením za λ a A funkce rozměru d dostáváme rovnici:
ddFk
mez
uKK
00027854,0 .
2 ⋅−
−=⋅
⋅λ
σσσ ⇒ 0
7854,00002
.
2 =⋅
⋅−⋅⋅
−−
KKmez
uK Fkddσσλ
σσ .
Odkud vychází:
7854,044
20002
20002
2
..2,1 ⋅⋅
⋅⋅+
⋅
⋅−
−±⋅
⋅−
=KmezK
uK
mezK
uKT
Fkdσλσ
σσλσ
σσ .
Výsledkem jsoudva rozměry �
𝑑𝑑T1 = 70,9 mm − toto je hledaná VELIKOST průměru 𝑑𝑑 ,
𝑑𝑑T2 = −67,3 mm − záporný rozměr NEMÁ fyzikální smysl!
Poznámka: Pro ověření správnosti vypočteme pro výsledný rozměr dT1 = 70,9 mm velikost Tetmajerova napětí, které musí být v intervalu ⟨σu ÷ σK ⟩:
2-2. mmN266
9,707854,00003005,3
⋅≈⋅
⋅=
⋅=
T
Tkr A
Fkσ
Kontrola je v pořádku, protože pro vypočtený průměr d splňuje opravdu hodnota Tetmajerova napětí podmínku nepružného vzpěru: σkr.∈ ⟨σu ; σK⟩.
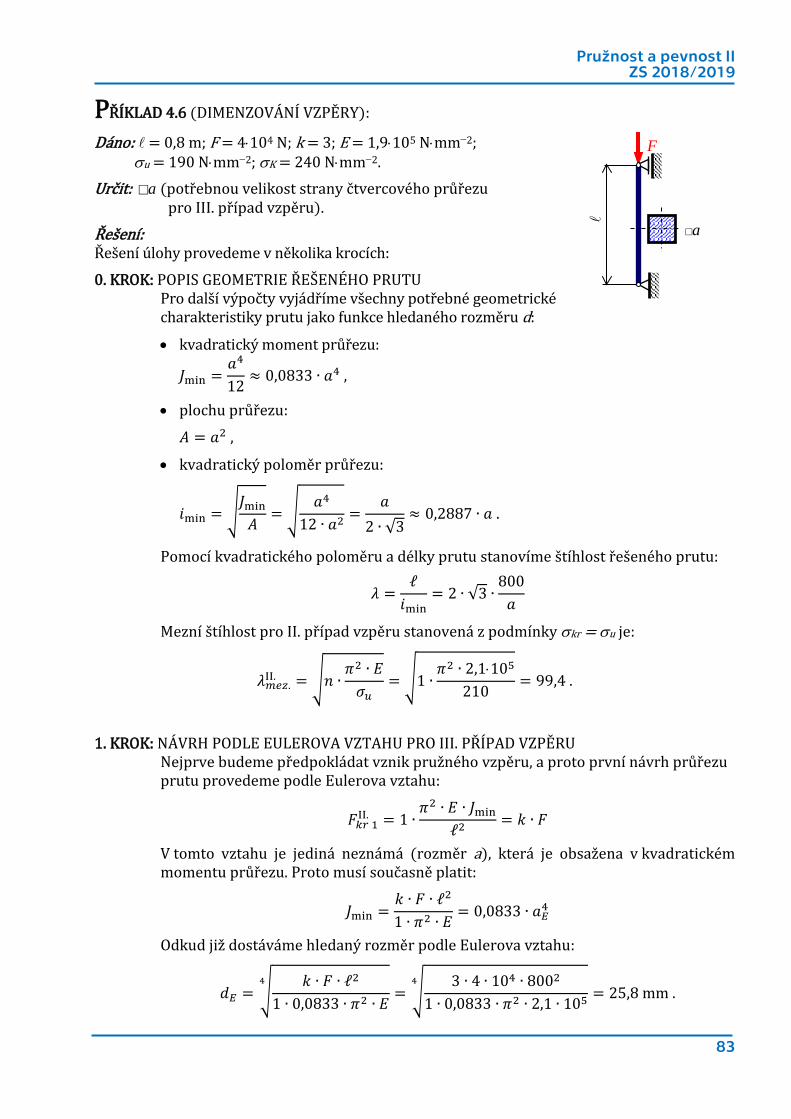
Pružnost a pevnost II ZS 2018/2019
83
PŘÍKLAD 4.6 (DIMENZOVÁNÍ VZPĚRY):
Dáno: = 0,8 m; F = 4⋅104 N; k = 3; E = 1,9⋅105 N⋅mm−2; σu = 190 N⋅mm−2; σK = 240 N⋅mm−2. Určit: a (potřebnou velikost strany čtvercového průřezu pro III. případ vzpěru).
Řešení: Řešení úlohy provedeme v několika krocích:
0. KROK: POPIS GEOMETRIE ŘEŠENÉHO PRUTU Pro další výpočty vyjádříme všechny potřebné geometrické charakteristiky prutu jako funkce hledaného rozměru d:
• kvadratický moment průřezu:
𝐽𝐽min =𝑎𝑎4
12≈ 0,0833 ∙ 𝑎𝑎4 ,
• plochu průřezu:
𝐴𝐴 = 𝑎𝑎2 ,
• kvadratický poloměr průřezu:
𝑚𝑚min = �𝐽𝐽min
𝐴𝐴= � 𝑎𝑎4
12 ∙ 𝑎𝑎2 =𝑎𝑎
2 ∙ √3≈ 0,2887 ∙ 𝑎𝑎 .
Pomocí kvadratického poloměru a délky prutu stanovíme štíhlost řešeného prutu:
𝜆𝜆 =ℓ
𝑚𝑚min= 2 ∙ √3 ∙
800𝑎𝑎
Mezní štíhlost pro II. případ vzpěru stanovená z podmínky σkr = σu je:
𝜆𝜆𝑚𝑚𝑐𝑐𝑧𝑧.II. = �𝑚𝑚 ∙
𝜋𝜋2 ∙ 𝐸𝐸𝜎𝜎𝑢𝑢
= �1 ∙𝜋𝜋2 ∙ 2,1⋅105
210= 99,4 .
1. KROK: NÁVRH PODLE EULEROVA VZTAHU PRO III. PŘÍPAD VZPĚRU
Nejprve budeme předpokládat vznik pružného vzpěru, a proto první návrh průřezu prutu provedeme podle Eulerova vztahu:
𝐹𝐹𝑐𝑐𝑜𝑜 1II. = 1 ∙
𝜋𝜋2 ∙ 𝐸𝐸 ∙ 𝐽𝐽min
ℓ2 = 𝑘𝑘 ∙ 𝐹𝐹
V tomto vztahu je jediná neznámá (rozměr a), která je obsažena v kvadratickém momentu průřezu. Proto musí současně platit:
𝐽𝐽min =𝑘𝑘 ∙ 𝐹𝐹 ∙ ℓ2
1 ∙ 𝜋𝜋2 ∙ 𝐸𝐸= 0,0833 ∙ 𝑎𝑎𝐸𝐸
4
Odkud již dostáváme hledaný rozměr podle Eulerova vztahu:
𝑑𝑑𝐸𝐸 = � 𝑘𝑘 ∙ 𝐹𝐹 ∙ ℓ2
1 ∙ 0,0833 ∙ 𝜋𝜋2 ∙ 𝐸𝐸4
= � 3 ∙ 4 ∙ 104 ∙ 8002
1 ∙ 0,0833 ∙ 𝜋𝜋2 ∙ 2,1 ∙ 105
4= 25,8 mm .
F
a

84
2. KROK: KONTROLA PLATNOSTI EULEROVA VZTAHU Nyní se musíme přesvědčit, zda byla splněna podmínka použitelnosti Eulerova vztahu. Kontrola se dá provést dvojím způsobem:
a) primární kontrola by měla být přes napětí, zda je splněna podmínka 𝜎𝜎𝑐𝑐𝑜𝑜.𝐸𝐸 ≤ 𝜎𝜎𝑢𝑢:
𝜎𝜎𝑐𝑐𝑜𝑜 1𝐸𝐸 =
𝑘𝑘 ∙ 𝐹𝐹𝐴𝐴𝐸𝐸
=𝑘𝑘 ∙ 𝐹𝐹𝑎𝑎𝐸𝐸
2 =3 ∙ 4 ∙ 104
36,32 = 180,3 N ∙ mm−2 .
b) alternativní podmínka pro platnost Eulerova vztahu je přes štíhlost 𝜆𝜆𝐸𝐸 ≥ 𝜆𝜆𝑚𝑚𝑐𝑐𝑧𝑧 :
𝜆𝜆 =ℓ
𝑚𝑚min=
2 ∙ √3 ∙ ℓ𝑎𝑎𝐸𝐸
=2 ∙ √3 ∙ 800
25,8= 107,4
Protože 𝜎𝜎𝑐𝑐𝑜𝑜 1
𝐸𝐸 < 𝜎𝜎𝑢𝑢, resp. λE >λmez bylo použití Eulerova vztahu pro pružný vzpěr zcela oprávněné a tedy NENÍ třeba dále provést přepočet pomocí vztahů platných pro nepružný rozsah (např. Tetmajerův vztah).
3. KROK: PŘEPOČET PODLE TETMAJERA – NENÍ TŘEBA PROVÁDĚT

Pružnost a pevnost II ZS 2018/2019
85
PŘÍKLAD 4.7 (DIMENZOVÁNÍ VZPĚRY):
Dáno: F = 2⋅103 N; = 350 mm; k = 4; E = 2,1⋅105 N⋅mm−2; σu = 180 N⋅mm−2 a σK = 280 N⋅mm−2. Určit: h (potřebnou velikost obdélníkového průřezu pro I. případ vzpěru).
Řešení: Řešení úlohy provedeme v několika krocích:
0. KROK: POPIS GEOMETRIE ŘEŠENÉHO PRUTU Pro další výpočty vyjádříme všechny potřebné geometrické charakteristiky prutu jako funkce hledaného rozměru d:
• kvadratický moment průřezu:
𝐽𝐽min =2 ∙ ℎ ∙ ℎ3
12=
ℎ4
6≈ 0,1667 ∙ ℎ4 ,
• plochu průřezu:
𝐴𝐴 = 2 ∙ ℎ ∙ ℎ = 2 ∙ ℎ2 ,
• kvadratický poloměr průřezu:
𝑚𝑚min = �𝐽𝐽min
𝐴𝐴= � ℎ4
6 ∙ 2 ∙ ℎ2 =ℎ
√6≈ 0,4082 ∙ ℎ .
Pomocí kvadratického poloměru a délky prutu stanovíme štíhlost řešeného prutu:
𝜆𝜆 =ℓ
𝑚𝑚min= √6 ∙
350ℎ
Mezní štíhlost pro II. případ vzpěru stanovená z podmínky σkr = σu je:
𝜆𝜆𝑚𝑚𝑐𝑐𝑧𝑧.I. = �𝑚𝑚 ∙
𝜋𝜋2 ∙ 𝐸𝐸𝜎𝜎𝑢𝑢
= �14
∙𝜋𝜋2 ∙ 2,1⋅105
180= 53,6 .
1. KROK: NÁVRH PODLE EULEROVA VZTAHU PRO III. PŘÍPAD VZPĚRU
Nejprve budeme předpokládat vznik pružného vzpěru, a proto první návrh průřezu prutu provedeme podle Eulerova vztahu:
𝐹𝐹𝑐𝑐𝑜𝑜 1I. =
14
∙𝜋𝜋2 ∙ 𝐸𝐸 ∙ 𝐽𝐽min
ℓ2 = 𝑘𝑘 ∙ 𝐹𝐹
V tomto vztahu je jediná neznámá (rozměr a), která je obsažena v kvadratickém momentu průřezu. Proto musí současně platit:
𝐽𝐽min =4 ∙ 𝑘𝑘 ∙ 𝐹𝐹 ∙ ℓ2
𝜋𝜋2 ∙ 𝐸𝐸= 0,1667 ∙ ℎ𝐸𝐸
4
Odkud již dostáváme hledaný rozměr podle Eulerova vztahu:
ℎ𝐸𝐸 = � 𝑘𝑘 ∙ 𝐹𝐹 ∙ ℓ2
1 ∙ 0,1667 ∙ 𝜋𝜋2 ∙ 𝐸𝐸4
= � 4 ∙ 4 ∙ 2 ∙ 103 ∙ 3502
0,1667 ∙ 𝜋𝜋2 ∙ 2,1 ∙ 105
4= 10,3 mm .
F
h×2⋅h

86
2. KROK: KONTROLA PLATNOSTI EULEROVA VZTAHU Nyní se musíme přesvědčit, zda byla splněna podmínka použitelnosti Eulerova vztahu. Kontrola se dá provést dvojím způsobem:
a) primární kontrola by měla být přes napětí, zda je splněna podmínka 𝜎𝜎𝑐𝑐𝑜𝑜.𝐸𝐸 ≤ 𝜎𝜎𝑢𝑢:
𝜎𝜎𝑐𝑐𝑜𝑜 1𝐸𝐸 =
𝑘𝑘 ∙ 𝐹𝐹𝐴𝐴𝐸𝐸
=𝑘𝑘 ∙ 𝐹𝐹2 ∙ ℎ𝐸𝐸
2 =4 ∙ 2 ∙ 103
2 ∙ 10,32 = 37,7 N ∙ mm−2 .
b) alternativní podmínka pro platnost Eulerova vztahu je přes štíhlost 𝜆𝜆𝐸𝐸 ≥ 𝜆𝜆𝑚𝑚𝑐𝑐𝑧𝑧 :
𝜆𝜆 =ℓ
𝑚𝑚min=
√6 ∙ ℓ𝑎𝑎𝐸𝐸
=√6 ∙ 350
10,3= 83,2
Protože 𝝈𝝈𝒌𝒌𝒌𝒌 𝟏𝟏𝑬𝑬 < 𝝈𝝈𝒖𝒖, resp. λE >λmez bylo použití Eulerova vztahu pro pružný vzpěr zcela
oprávněné a NENÍ tedy třeba dále provést přepočet pomocí vztahů platných pro nepružný rozsah (např. Tetmajerův vztah).
3. KROK: PŘEPOČET PODLE TETMAJERA – NENÍ TŘEBA PROVÁDĚT
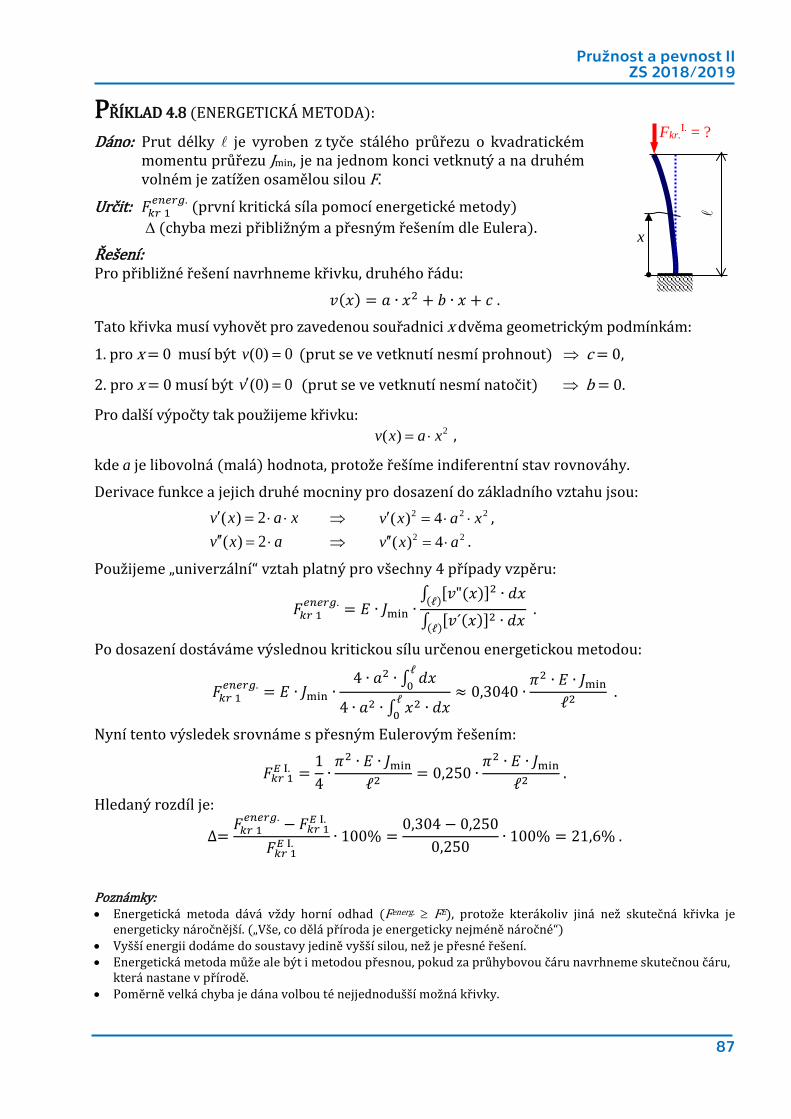
Pružnost a pevnost II ZS 2018/2019
87
PŘÍKLAD 4.8 (ENERGETICKÁ METODA):
Dáno: Prut délky je vyroben z tyče stálého průřezu o kvadratickém momentu průřezu Jmin, je na jednom konci vetknutý a na druhém volném je zatížen osamělou silou F.
Určit: 𝐹𝐹𝑐𝑐𝑜𝑜 1𝑐𝑐𝑑𝑑𝑐𝑐𝑜𝑜𝑒𝑒. (první kritická síla pomocí energetické metody)
∆ (chyba mezi přibližným a přesným řešením dle Eulera).
Řešení: Pro přibližné řešení navrhneme křivku, druhého řádu:
𝑣𝑣(𝑚𝑚) = 𝑎𝑎 ∙ 𝑚𝑚2 + 𝑏𝑏 ∙ 𝑚𝑚 + 𝑐𝑐 .
Tato křivka musí vyhovět pro zavedenou souřadnici x dvěma geometrickým podmínkám:
1. pro x = 0 musí být 0)0( =v (prut se ve vetknutí nesmí prohnout) ⇒ c = 0,
2. pro x = 0 musí být 0)0( =′v (prut se ve vetknutí nesmí natočit) ⇒ b = 0.
Pro další výpočty tak použijeme křivku: 2)( xaxv ⋅= ,
kde a je libovolná (malá) hodnota, protože řešíme indiferentní stav rovnováhy.
Derivace funkce a jejich druhé mocniny pro dosazení do základního vztahu jsou: xaxv ⋅⋅=′ 2)( ⇒ 222 4)( xaxv ⋅⋅=′ ,
axv ⋅=′′ 2)( ⇒ 22 4)( axv ⋅=′′ .
Použijeme „univerzální“ vztah platný pro všechny 4 případy vzpěru:
𝐹𝐹𝑐𝑐𝑜𝑜 1𝑐𝑐𝑑𝑑𝑐𝑐𝑜𝑜𝑒𝑒. = 𝐸𝐸 ∙ 𝐽𝐽min ∙
∫ [𝑣𝑣"(𝑚𝑚)]2 ∙ 𝑑𝑑𝑚𝑚 (ℓ)
∫ [𝑣𝑣´(𝑚𝑚)]2 ∙ 𝑑𝑑𝑚𝑚 (ℓ)
.
Po dosazení dostáváme výslednou kritickou sílu určenou energetickou metodou:
𝐹𝐹𝑐𝑐𝑜𝑜 1𝑐𝑐𝑑𝑑𝑐𝑐𝑜𝑜𝑒𝑒. = 𝐸𝐸 ∙ 𝐽𝐽min ∙
4 ∙ 𝑎𝑎2 ∙ ∫ 𝑑𝑑𝑚𝑚ℓ0
4 ∙ 𝑎𝑎2 ∙ ∫ 𝑚𝑚2 ∙ 𝑑𝑑𝑚𝑚ℓ0
≈ 0,3040 ∙𝜋𝜋2 ∙ 𝐸𝐸 ∙ 𝐽𝐽min
ℓ2 .
Nyní tento výsledek srovnáme s přesným Eulerovým řešením:
𝐹𝐹𝑐𝑐𝑜𝑜 1𝐸𝐸 I. =
14
∙𝜋𝜋2 ∙ 𝐸𝐸 ∙ 𝐽𝐽min
ℓ2 = 0,250 ∙𝜋𝜋2 ∙ 𝐸𝐸 ∙ 𝐽𝐽min
ℓ2 .
Hledaný rozdíl je:
∆=𝐹𝐹𝑐𝑐𝑜𝑜 1
𝑐𝑐𝑑𝑑𝑐𝑐𝑜𝑜𝑒𝑒. − 𝐹𝐹𝑐𝑐𝑜𝑜 1𝐸𝐸 I.
𝐹𝐹𝑐𝑐𝑜𝑜 1𝐸𝐸 I. ∙ 100% =
0,304 − 0,2500,250
∙ 100% = 21,6% .
Poznámky: • Energetická metoda dává vždy horní odhad (Fenerg. ≥ FE), protože kterákoliv jiná než skutečná křivka je
energeticky náročnější. („Vše, co dělá příroda je energeticky nejméně náročné“) • Vyšší energii dodáme do soustavy jedině vyšší silou, než je přesné řešení. • Energetická metoda může ale být i metodou přesnou, pokud za průhybovou čáru navrhneme skutečnou čáru,
která nastane v přírodě. • Poměrně velká chyba je dána volbou té nejjednodušší možná křivky.
Fkr.I. = ?
x
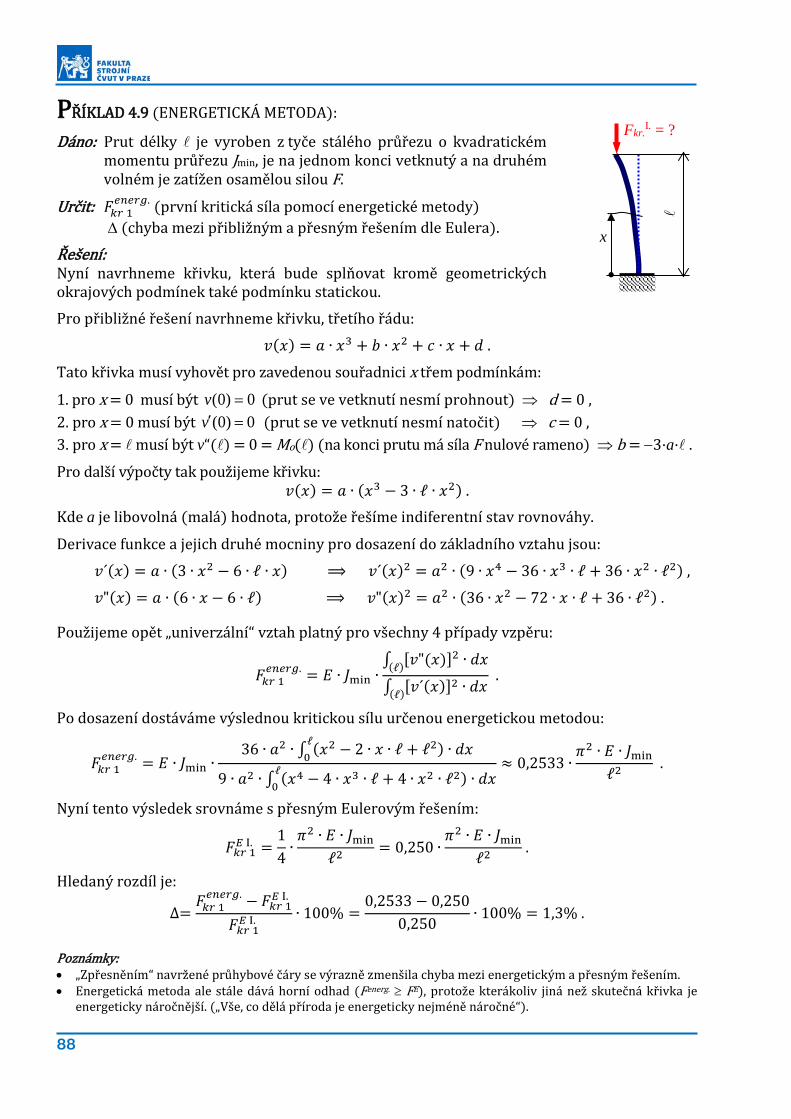
88
PŘÍKLAD 4.9 (ENERGETICKÁ METODA):
Dáno: Prut délky je vyroben z tyče stálého průřezu o kvadratickém momentu průřezu Jmin, je na jednom konci vetknutý a na druhém volném je zatížen osamělou silou F.
Určit: 𝐹𝐹𝑐𝑐𝑜𝑜 1𝑐𝑐𝑑𝑑𝑐𝑐𝑜𝑜𝑒𝑒. (první kritická síla pomocí energetické metody)
∆ (chyba mezi přibližným a přesným řešením dle Eulera).
Řešení: Nyní navrhneme křivku, která bude splňovat kromě geometrických okrajových podmínek také podmínku statickou.
Pro přibližné řešení navrhneme křivku, třetího řádu:
𝑣𝑣(𝑚𝑚) = 𝑎𝑎 ∙ 𝑚𝑚3 + 𝑏𝑏 ∙ 𝑚𝑚2 + 𝑐𝑐 ∙ 𝑚𝑚 + 𝑑𝑑 .
Tato křivka musí vyhovět pro zavedenou souřadnici x třem podmínkám:
1. pro x = 0 musí být 0)0( =v (prut se ve vetknutí nesmí prohnout) ⇒ d = 0 , 2. pro x = 0 musí být 0)0( =′v (prut se ve vetknutí nesmí natočit) ⇒ c = 0 , 3. pro x = musí být v“() = 0 = Mo() (na konci prutu má síla F nulové rameno) ⇒ b = −3·a· .
Pro další výpočty tak použijeme křivku: 𝑣𝑣(𝑚𝑚) = 𝑎𝑎 ∙ (𝑚𝑚3 − 3 ∙ ℓ ∙ 𝑚𝑚2) .
Kde a je libovolná (malá) hodnota, protože řešíme indiferentní stav rovnováhy.
Derivace funkce a jejich druhé mocniny pro dosazení do základního vztahu jsou:
𝑣𝑣´(𝑚𝑚) = 𝑎𝑎 ∙ (3 ∙ 𝑚𝑚2 − 6 ∙ ℓ ∙ 𝑚𝑚) ⟹ 𝑣𝑣´(𝑚𝑚)2 = 𝑎𝑎2 ∙ (9 ∙ 𝑚𝑚4 − 36 ∙ 𝑚𝑚3 ∙ ℓ + 36 ∙ 𝑚𝑚2 ∙ ℓ2) ,
𝑣𝑣"(𝑚𝑚) = 𝑎𝑎 ∙ (6 ∙ 𝑚𝑚 − 6 ∙ ℓ) ⟹ 𝑣𝑣"(𝑚𝑚)2 = 𝑎𝑎2 ∙ (36 ∙ 𝑚𝑚2 − 72 ∙ 𝑚𝑚 ∙ ℓ + 36 ∙ ℓ2) .
Použijeme opět „univerzální“ vztah platný pro všechny 4 případy vzpěru:
𝐹𝐹𝑐𝑐𝑜𝑜 1𝑐𝑐𝑑𝑑𝑐𝑐𝑜𝑜𝑒𝑒. = 𝐸𝐸 ∙ 𝐽𝐽min ∙
∫ [𝑣𝑣"(𝑚𝑚)]2 ∙ 𝑑𝑑𝑚𝑚 (ℓ)
∫ [𝑣𝑣´(𝑚𝑚)]2 ∙ 𝑑𝑑𝑚𝑚 (ℓ)
.
Po dosazení dostáváme výslednou kritickou sílu určenou energetickou metodou:
𝐹𝐹𝑐𝑐𝑜𝑜 1𝑐𝑐𝑑𝑑𝑐𝑐𝑜𝑜𝑒𝑒. = 𝐸𝐸 ∙ 𝐽𝐽min ∙
36 ∙ 𝑎𝑎2 ∙ ∫ (𝑚𝑚2 − 2 ∙ 𝑚𝑚 ∙ ℓ + ℓ2) ∙ 𝑑𝑑𝑚𝑚ℓ0
9 ∙ 𝑎𝑎2 ∙ ∫ (𝑚𝑚4 − 4 ∙ 𝑚𝑚3 ∙ ℓ + 4 ∙ 𝑚𝑚2 ∙ ℓ2) ∙ 𝑑𝑑𝑚𝑚ℓ0
≈ 0,2533 ∙𝜋𝜋2 ∙ 𝐸𝐸 ∙ 𝐽𝐽min
ℓ2 .
Nyní tento výsledek srovnáme s přesným Eulerovým řešením:
𝐹𝐹𝑐𝑐𝑜𝑜 1𝐸𝐸 I. =
14
∙𝜋𝜋2 ∙ 𝐸𝐸 ∙ 𝐽𝐽min
ℓ2 = 0,250 ∙𝜋𝜋2 ∙ 𝐸𝐸 ∙ 𝐽𝐽min
ℓ2 .
Hledaný rozdíl je:
∆=𝐹𝐹𝑐𝑐𝑜𝑜 1
𝑐𝑐𝑑𝑑𝑐𝑐𝑜𝑜𝑒𝑒. − 𝐹𝐹𝑐𝑐𝑜𝑜 1𝐸𝐸 I.
𝐹𝐹𝑐𝑐𝑜𝑜 1𝐸𝐸 I. ∙ 100% =
0,2533 − 0,2500,250
∙ 100% = 1,3% .
Poznámky: • „Zpřesněním“ navržené průhybové čáry se výrazně zmenšila chyba mezi energetickým a přesným řešením. • Energetická metoda ale stále dává horní odhad (Fenerg. ≥ FE), protože kterákoliv jiná než skutečná křivka je
energeticky náročnější. („Vše, co dělá příroda je energeticky nejméně náročné“).
Fkr.I. = ?
x
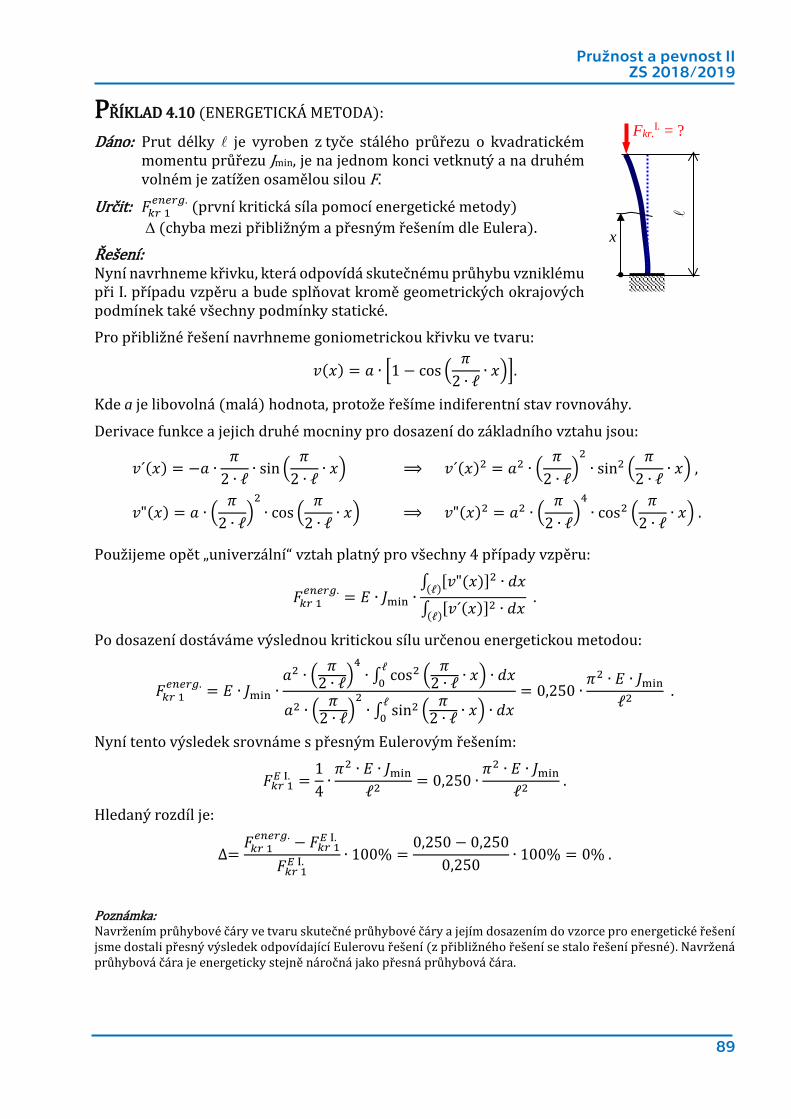
Pružnost a pevnost II ZS 2018/2019
89
PŘÍKLAD 4.10 (ENERGETICKÁ METODA):
Dáno: Prut délky je vyroben z tyče stálého průřezu o kvadratickém momentu průřezu Jmin, je na jednom konci vetknutý a na druhém volném je zatížen osamělou silou F.
Určit: 𝐹𝐹𝑐𝑐𝑜𝑜 1𝑐𝑐𝑑𝑑𝑐𝑐𝑜𝑜𝑒𝑒. (první kritická síla pomocí energetické metody)
∆ (chyba mezi přibližným a přesným řešením dle Eulera).
Řešení: Nyní navrhneme křivku, která odpovídá skutečnému průhybu vzniklému při I. případu vzpěru a bude splňovat kromě geometrických okrajových podmínek také všechny podmínky statické.
Pro přibližné řešení navrhneme goniometrickou křivku ve tvaru:
𝑣𝑣(𝑚𝑚) = 𝑎𝑎 ∙ �1 − cos �𝜋𝜋
2 ∙ ℓ∙ 𝑚𝑚��.
Kde a je libovolná (malá) hodnota, protože řešíme indiferentní stav rovnováhy.
Derivace funkce a jejich druhé mocniny pro dosazení do základního vztahu jsou:
𝑣𝑣´(𝑚𝑚) = −𝑎𝑎 ∙𝜋𝜋
2 ∙ ℓ∙ sin �
𝜋𝜋2 ∙ ℓ
∙ 𝑚𝑚� ⟹ 𝑣𝑣´(𝑚𝑚)2 = 𝑎𝑎2 ∙ �𝜋𝜋
2 ∙ ℓ�
2∙ sin2 �
𝜋𝜋2 ∙ ℓ
∙ 𝑚𝑚� ,
𝑣𝑣"(𝑚𝑚) = 𝑎𝑎 ∙ �𝜋𝜋
2 ∙ ℓ�
2∙ cos �
𝜋𝜋2 ∙ ℓ
∙ 𝑚𝑚� ⟹ 𝑣𝑣"(𝑚𝑚)2 = 𝑎𝑎2 ∙ �𝜋𝜋
2 ∙ ℓ�
4∙ cos2 �
𝜋𝜋2 ∙ ℓ
∙ 𝑚𝑚� .
Použijeme opět „univerzální“ vztah platný pro všechny 4 případy vzpěru:
𝐹𝐹𝑐𝑐𝑜𝑜 1𝑐𝑐𝑑𝑑𝑐𝑐𝑜𝑜𝑒𝑒. = 𝐸𝐸 ∙ 𝐽𝐽min ∙
∫ [𝑣𝑣"(𝑚𝑚)]2 ∙ 𝑑𝑑𝑚𝑚 (ℓ)
∫ [𝑣𝑣´(𝑚𝑚)]2 ∙ 𝑑𝑑𝑚𝑚 (ℓ)
.
Po dosazení dostáváme výslednou kritickou sílu určenou energetickou metodou:
𝐹𝐹𝑐𝑐𝑜𝑜 1𝑐𝑐𝑑𝑑𝑐𝑐𝑜𝑜𝑒𝑒. = 𝐸𝐸 ∙ 𝐽𝐽min ∙
𝑎𝑎2 ∙ � 𝜋𝜋2 ∙ ℓ�
4∙ ∫ cos2 � 𝜋𝜋
2 ∙ ℓ ∙ 𝑚𝑚� ∙ 𝑑𝑑𝑚𝑚ℓ0
𝑎𝑎2 ∙ � 𝜋𝜋2 ∙ ℓ�
2∙ ∫ sin2 � 𝜋𝜋
2 ∙ ℓ ∙ 𝑚𝑚� ∙ 𝑑𝑑𝑚𝑚ℓ0
= 0,250 ∙𝜋𝜋2 ∙ 𝐸𝐸 ∙ 𝐽𝐽min
ℓ2 .
Nyní tento výsledek srovnáme s přesným Eulerovým řešením:
𝐹𝐹𝑐𝑐𝑜𝑜 1𝐸𝐸 I. =
14
∙𝜋𝜋2 ∙ 𝐸𝐸 ∙ 𝐽𝐽min
ℓ2 = 0,250 ∙𝜋𝜋2 ∙ 𝐸𝐸 ∙ 𝐽𝐽min
ℓ2 .
Hledaný rozdíl je:
∆=𝐹𝐹𝑐𝑐𝑜𝑜 1
𝑐𝑐𝑑𝑑𝑐𝑐𝑜𝑜𝑒𝑒. − 𝐹𝐹𝑐𝑐𝑜𝑜 1𝐸𝐸 I.
𝐹𝐹𝑐𝑐𝑜𝑜 1𝐸𝐸 I. ∙ 100% =
0,250 − 0,2500,250
∙ 100% = 0% .
Poznámka: Navržením průhybové čáry ve tvaru skutečné průhybové čáry a jejím dosazením do vzorce pro energetické řešení jsme dostali přesný výsledek odpovídající Eulerovu řešení (z přibližného řešení se stalo řešení přesné). Navržená průhybová čára je energeticky stejně náročná jako přesná průhybová čára.
Fkr.I. = ?
x
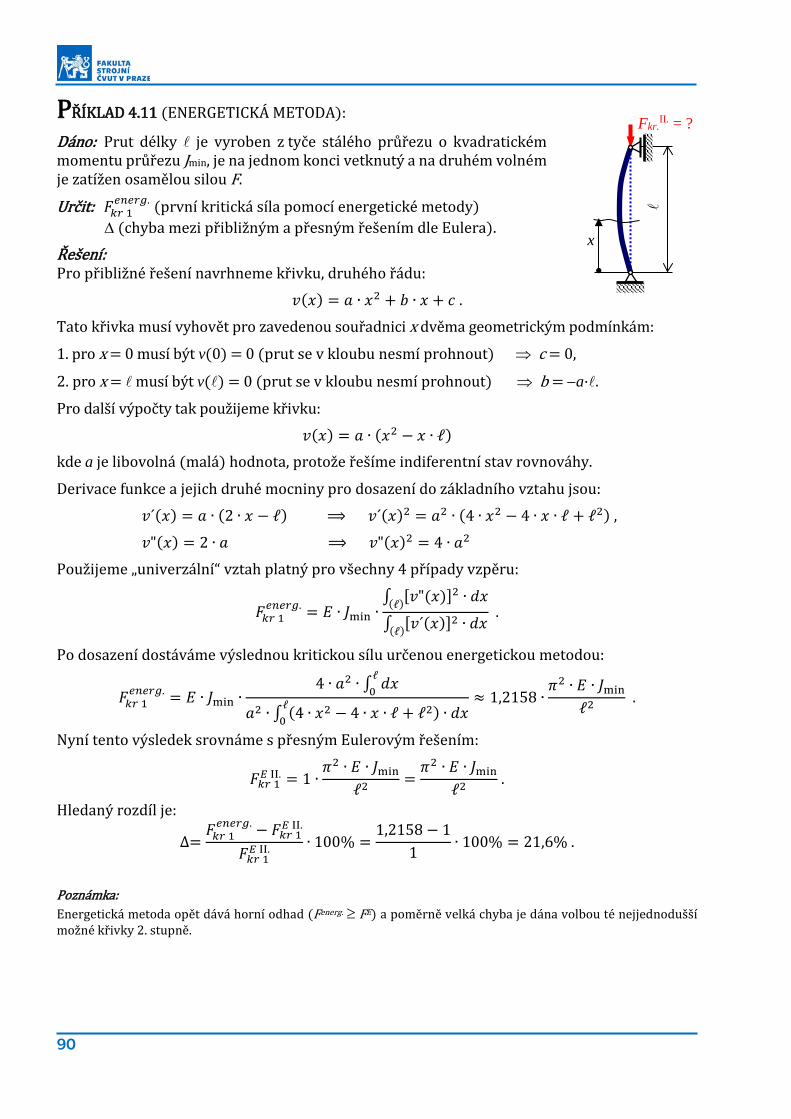
90
PŘÍKLAD 4.11 (ENERGETICKÁ METODA):
Dáno: Prut délky je vyroben z tyče stálého průřezu o kvadratickém momentu průřezu Jmin, je na jednom konci vetknutý a na druhém volném je zatížen osamělou silou F.
Určit: 𝐹𝐹𝑐𝑐𝑜𝑜 1𝑐𝑐𝑑𝑑𝑐𝑐𝑜𝑜𝑒𝑒. (první kritická síla pomocí energetické metody)
∆ (chyba mezi přibližným a přesným řešením dle Eulera).
Řešení: Pro přibližné řešení navrhneme křivku, druhého řádu:
𝑣𝑣(𝑚𝑚) = 𝑎𝑎 ∙ 𝑚𝑚2 + 𝑏𝑏 ∙ 𝑚𝑚 + 𝑐𝑐 .
Tato křivka musí vyhovět pro zavedenou souřadnici x dvěma geometrickým podmínkám:
1. pro x = 0 musí být v(0) = 0 (prut se v kloubu nesmí prohnout) ⇒ c = 0,
2. pro x = musí být v() = 0 (prut se v kloubu nesmí prohnout) ⇒ b = −a·.
Pro další výpočty tak použijeme křivku:
𝑣𝑣(𝑚𝑚) = 𝑎𝑎 ∙ (𝑚𝑚2 − 𝑚𝑚 ∙ ℓ) kde a je libovolná (malá) hodnota, protože řešíme indiferentní stav rovnováhy.
Derivace funkce a jejich druhé mocniny pro dosazení do základního vztahu jsou:
𝑣𝑣´(𝑚𝑚) = 𝑎𝑎 ∙ (2 ∙ 𝑚𝑚 − ℓ) ⟹ 𝑣𝑣´(𝑚𝑚)2 = 𝑎𝑎2 ∙ (4 ∙ 𝑚𝑚2 − 4 ∙ 𝑚𝑚 ∙ ℓ + ℓ2) ,
𝑣𝑣"(𝑚𝑚) = 2 ∙ 𝑎𝑎 ⟹ 𝑣𝑣"(𝑚𝑚)2 = 4 ∙ 𝑎𝑎2
Použijeme „univerzální“ vztah platný pro všechny 4 případy vzpěru:
𝐹𝐹𝑐𝑐𝑜𝑜 1𝑐𝑐𝑑𝑑𝑐𝑐𝑜𝑜𝑒𝑒. = 𝐸𝐸 ∙ 𝐽𝐽min ∙
∫ [𝑣𝑣"(𝑚𝑚)]2 ∙ 𝑑𝑑𝑚𝑚 (ℓ)
∫ [𝑣𝑣´(𝑚𝑚)]2 ∙ 𝑑𝑑𝑚𝑚 (ℓ)
.
Po dosazení dostáváme výslednou kritickou sílu určenou energetickou metodou:
𝐹𝐹𝑐𝑐𝑜𝑜 1𝑐𝑐𝑑𝑑𝑐𝑐𝑜𝑜𝑒𝑒. = 𝐸𝐸 ∙ 𝐽𝐽min ∙
4 ∙ 𝑎𝑎2 ∙ ∫ 𝑑𝑑𝑚𝑚ℓ0
𝑎𝑎2 ∙ ∫ (4 ∙ 𝑚𝑚2 − 4 ∙ 𝑚𝑚 ∙ ℓ + ℓ2) ∙ 𝑑𝑑𝑚𝑚ℓ0
≈ 1,2158 ∙𝜋𝜋2 ∙ 𝐸𝐸 ∙ 𝐽𝐽min
ℓ2 .
Nyní tento výsledek srovnáme s přesným Eulerovým řešením:
𝐹𝐹𝑐𝑐𝑜𝑜 1𝐸𝐸 II. = 1 ∙
𝜋𝜋2 ∙ 𝐸𝐸 ∙ 𝐽𝐽min
ℓ2 =𝜋𝜋2 ∙ 𝐸𝐸 ∙ 𝐽𝐽min
ℓ2 .
Hledaný rozdíl je:
∆=𝐹𝐹𝑐𝑐𝑜𝑜 1
𝑐𝑐𝑑𝑑𝑐𝑐𝑜𝑜𝑒𝑒. − 𝐹𝐹𝑐𝑐𝑜𝑜 1𝐸𝐸 II.
𝐹𝐹𝑐𝑐𝑜𝑜 1𝐸𝐸 II. ∙ 100% =
1,2158 − 11
∙ 100% = 21,6% .
Poznámka: Energetická metoda opět dává horní odhad (Fenerg. ≥ FE) a poměrně velká chyba je dána volbou té nejjednodušší možné křivky 2. stupně.
Fkr.II. = ?
x

Pružnost a pevnost II ZS 2018/2019
91
PŘÍKLAD 4.12 (ENERGETICKÁ METODA):
Dáno: Prut délky je vyroben z tyče stálého průřezu o kvadratickém momentu průřezu Jmin, je na jednom konci vetknutý a na druhém volném je zatížen osamělou silou F.
Určit: 𝐹𝐹𝑐𝑐𝑜𝑜 1𝑐𝑐𝑑𝑑𝑐𝑐𝑜𝑜𝑒𝑒. (první kritická síla pomocí energetické metody)
∆ (chyba mezi přibližným a přesným řešením dle Eulera).
Řešení: Pro přibližné řešení navrhneme křivku, druhého řádu:
𝑣𝑣(𝑚𝑚) = 𝑎𝑎 ∙ 𝑚𝑚2 + 𝑏𝑏 ∙ 𝑚𝑚 + 𝑐𝑐 .
Tato křivka musí vyhovět pro zavedenou souřadnici x dvěma geometrickým podmínkám:
1. pro x = 0 musí být v(0) = 0 (prut se v kloubu nesmí prohnout) ⇒ c = 0,
2. pro x = musí být v() = 0 (prut se v kloubu nesmí prohnout) ⇒ b = −a·.
Pro další výpočty tak použijeme křivku:
𝑣𝑣(𝑚𝑚) = 𝑎𝑎 ∙ (𝑚𝑚2 − 𝑚𝑚 ∙ ℓ) kde a je libovolná (malá) hodnota, protože řešíme indiferentní stav rovnováhy.
Derivace funkce a jejich druhé mocniny pro dosazení do základního vztahu jsou:
𝑣𝑣(𝑚𝑚) = 𝑎𝑎 ∙ (𝑚𝑚2 − 𝑚𝑚 ∙ ℓ) ⟹ 𝑣𝑣(𝑚𝑚)2 = 𝑎𝑎2 ∙ (𝑚𝑚4 − 2 ∙ 𝑚𝑚3 ∙ ℓ + 𝑚𝑚2 ∙ ℓ2) ,
𝑣𝑣´(𝑚𝑚) = 𝑎𝑎 ∙ (2 ∙ 𝑚𝑚 − ℓ) ⟹ 𝑣𝑣´(𝑚𝑚)2 = 𝑎𝑎2 ∙ (4 ∙ 𝑚𝑚2 − 4 ∙ 𝑚𝑚 ∙ ℓ + ℓ2) ,
Použijeme upravený vztah platný pouze pro 2. případ vzpěru:
𝐹𝐹𝑐𝑐𝑜𝑜 1𝑐𝑐𝑑𝑑𝑐𝑐𝑜𝑜𝑒𝑒. (II.) =
∫ [𝑣𝑣´(𝑚𝑚)]2 ∙ 𝑑𝑑𝑚𝑚 (ℓ)
1𝐸𝐸 ∙ 𝐽𝐽min
∙ ∫ [𝑣𝑣(𝑚𝑚)]2 ∙ 𝑑𝑑𝑚𝑚 (ℓ)
.
Po dosazení dostáváme výslednou kritickou sílu určenou energetickou metodou:
𝐹𝐹𝑐𝑐𝑜𝑜 1𝑐𝑐𝑑𝑑𝑐𝑐𝑜𝑜𝑒𝑒. (II.) = 𝐸𝐸 ∙ 𝐽𝐽min ∙
𝑎𝑎2 ∙ ∫ (4 ∙ 𝑚𝑚2 − 4 ∙ 𝑚𝑚 ∙ ℓ + ℓ2) ∙ 𝑑𝑑𝑚𝑚ℓ0
𝑎𝑎2 ∙ ∫ (𝑚𝑚4 − 2 ∙ 𝑚𝑚3 ∙ ℓ + 𝑚𝑚2 ∙ ℓ2) ∙ 𝑑𝑑𝑚𝑚ℓ0
≈ 1,0132 ∙𝜋𝜋2 ∙ 𝐸𝐸 ∙ 𝐽𝐽min
ℓ2 .
Nyní tento výsledek srovnáme s přesným Eulerovým řešením:
𝐹𝐹𝑐𝑐𝑜𝑜 1𝐸𝐸 II. = 1 ∙
𝜋𝜋2 ∙ 𝐸𝐸 ∙ 𝐽𝐽min
ℓ2 =𝜋𝜋2 ∙ 𝐸𝐸 ∙ 𝐽𝐽min
ℓ2 .
Hledaný rozdíl je:
∆=𝐹𝐹𝑐𝑐𝑜𝑜 1
𝑐𝑐𝑑𝑑𝑐𝑐𝑜𝑜𝑒𝑒.(II.) − 𝐹𝐹𝑐𝑐𝑜𝑜 1𝐸𝐸 II.
𝐹𝐹𝑐𝑐𝑜𝑜 1𝐸𝐸 II. ∙ 100% =
1,0132 − 11
∙ 100% = 1,3% .
Poznámky: • Energetická metoda opět dává horní odhad (Fenerg. ≥ FE). • Při použití původní průhybové čáry a jejím dosazením do upraveného vzorce pro energetické řešení II. případu
vzpěru se výrazně snížila chyba výsledku oproti přesnému Eulerovu řešení.
Fkr.II. = ?
x
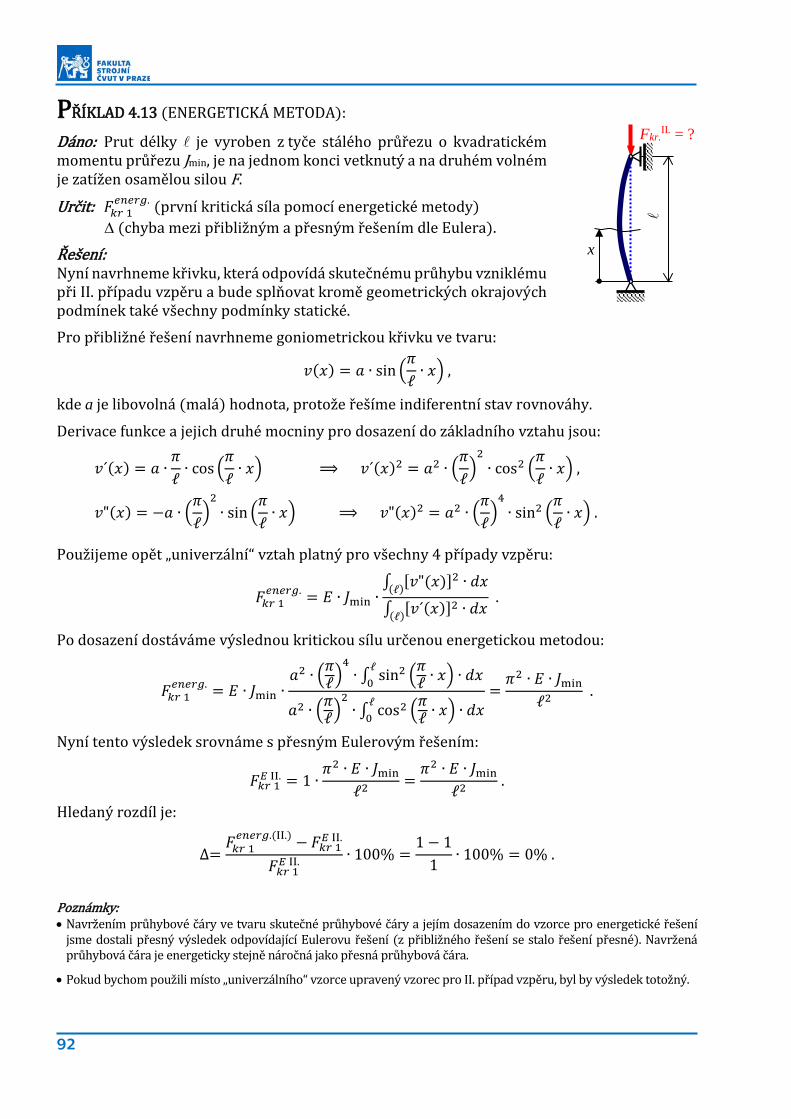
92
PŘÍKLAD 4.13 (ENERGETICKÁ METODA):
Dáno: Prut délky je vyroben z tyče stálého průřezu o kvadratickém momentu průřezu Jmin, je na jednom konci vetknutý a na druhém volném je zatížen osamělou silou F.
Určit: 𝐹𝐹𝑐𝑐𝑜𝑜 1𝑐𝑐𝑑𝑑𝑐𝑐𝑜𝑜𝑒𝑒. (první kritická síla pomocí energetické metody)
∆ (chyba mezi přibližným a přesným řešením dle Eulera).
Řešení: Nyní navrhneme křivku, která odpovídá skutečnému průhybu vzniklému při II. případu vzpěru a bude splňovat kromě geometrických okrajových podmínek také všechny podmínky statické.
Pro přibližné řešení navrhneme goniometrickou křivku ve tvaru:
𝑣𝑣(𝑚𝑚) = 𝑎𝑎 ∙ sin �𝜋𝜋ℓ
∙ 𝑚𝑚� ,
kde a je libovolná (malá) hodnota, protože řešíme indiferentní stav rovnováhy.
Derivace funkce a jejich druhé mocniny pro dosazení do základního vztahu jsou:
𝑣𝑣´(𝑚𝑚) = 𝑎𝑎 ∙𝜋𝜋ℓ
∙ cos �𝜋𝜋ℓ
∙ 𝑚𝑚� ⟹ 𝑣𝑣´(𝑚𝑚)2 = 𝑎𝑎2 ∙ �𝜋𝜋ℓ
�2
∙ cos2 �𝜋𝜋ℓ
∙ 𝑚𝑚� ,
𝑣𝑣"(𝑚𝑚) = −𝑎𝑎 ∙ �𝜋𝜋ℓ
�2
∙ sin �𝜋𝜋ℓ
∙ 𝑚𝑚� ⟹ 𝑣𝑣"(𝑚𝑚)2 = 𝑎𝑎2 ∙ �𝜋𝜋ℓ
�4
∙ sin2 �𝜋𝜋ℓ
∙ 𝑚𝑚� .
Použijeme opět „univerzální“ vztah platný pro všechny 4 případy vzpěru:
𝐹𝐹𝑐𝑐𝑜𝑜 1𝑐𝑐𝑑𝑑𝑐𝑐𝑜𝑜𝑒𝑒. = 𝐸𝐸 ∙ 𝐽𝐽min ∙
∫ [𝑣𝑣"(𝑚𝑚)]2 ∙ 𝑑𝑑𝑚𝑚 (ℓ)
∫ [𝑣𝑣´(𝑚𝑚)]2 ∙ 𝑑𝑑𝑚𝑚 (ℓ)
.
Po dosazení dostáváme výslednou kritickou sílu určenou energetickou metodou:
𝐹𝐹𝑐𝑐𝑜𝑜 1𝑐𝑐𝑑𝑑𝑐𝑐𝑜𝑜𝑒𝑒. = 𝐸𝐸 ∙ 𝐽𝐽min ∙
𝑎𝑎2 ∙ �𝜋𝜋ℓ�
4∙ ∫ sin2 �𝜋𝜋
ℓ ∙ 𝑚𝑚� ∙ 𝑑𝑑𝑚𝑚ℓ0
𝑎𝑎2 ∙ �𝜋𝜋ℓ�
2∙ ∫ cos2 �𝜋𝜋
ℓ ∙ 𝑚𝑚� ∙ 𝑑𝑑𝑚𝑚ℓ0
=𝜋𝜋2 ∙ 𝐸𝐸 ∙ 𝐽𝐽min
ℓ2 .
Nyní tento výsledek srovnáme s přesným Eulerovým řešením:
𝐹𝐹𝑐𝑐𝑜𝑜 1𝐸𝐸 II. = 1 ∙
𝜋𝜋2 ∙ 𝐸𝐸 ∙ 𝐽𝐽min
ℓ2 =𝜋𝜋2 ∙ 𝐸𝐸 ∙ 𝐽𝐽min
ℓ2 .
Hledaný rozdíl je:
∆=𝐹𝐹𝑐𝑐𝑜𝑜 1
𝑐𝑐𝑑𝑑𝑐𝑐𝑜𝑜𝑒𝑒.(II.) − 𝐹𝐹𝑐𝑐𝑜𝑜 1𝐸𝐸 II.
𝐹𝐹𝑐𝑐𝑜𝑜 1𝐸𝐸 II. ∙ 100% =
1 − 11
∙ 100% = 0% .
Poznámky: • Navržením průhybové čáry ve tvaru skutečné průhybové čáry a jejím dosazením do vzorce pro energetické řešení
jsme dostali přesný výsledek odpovídající Eulerovu řešení (z přibližného řešení se stalo řešení přesné). Navržená průhybová čára je energeticky stejně náročná jako přesná průhybová čára.
• Pokud bychom použili místo „univerzálního“ vzorce upravený vzorec pro II. případ vzpěru, byl by výsledek totožný.
Fkr.II. = ?
x
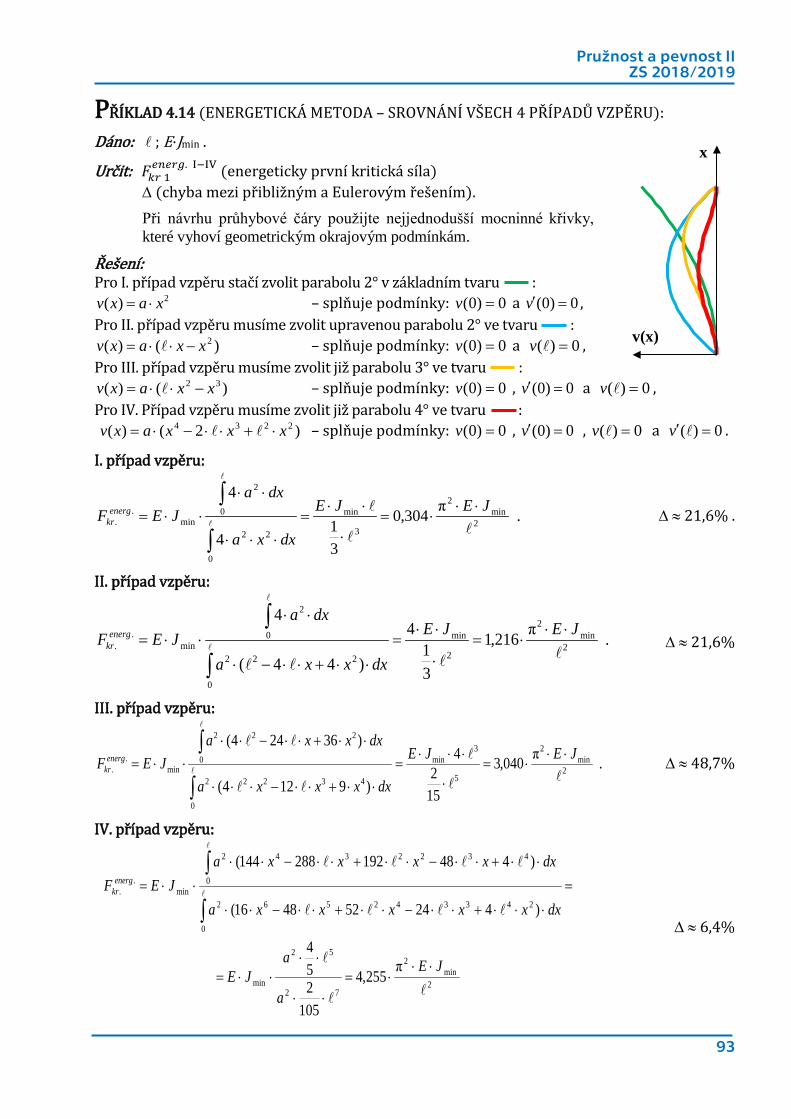
Pružnost a pevnost II ZS 2018/2019
93
PŘÍKLAD 4.14 (ENERGETICKÁ METODA – SROVNÁNÍ VŠECH 4 PŘÍPADŮ VZPĚRU):
Dáno: ; E·Jmin .
Určit: 𝐹𝐹𝑐𝑐𝑜𝑜 1𝑐𝑐𝑑𝑑𝑐𝑐𝑜𝑜𝑒𝑒. I−IV (energeticky první kritická síla)
∆ (chyba mezi přibližným a Eulerovým řešením). Při návrhu průhybové čáry použijte nejjednodušší mocninné křivky, které vyhoví geometrickým okrajovým podmínkám.
Řešení: Pro I. případ vzpěru stačí zvolit parabolu 2° v základním tvaru :
2)( xaxv ⋅= – splňuje podmínky: 0)0( =v a 0)0( =′v , Pro II. případ vzpěru musíme zvolit upravenou parabolu 2° ve tvaru :
)()( 2xxaxv −⋅⋅= – splňuje podmínky: 0)0( =v a 0)( =v , Pro III. případ vzpěru musíme zvolit již parabolu 3° ve tvaru :
)()( 32 xxaxv −⋅⋅= – splňuje podmínky: 0)0( =v , 0)0( =′v a 0)( =v , Pro IV. Případ vzpěru musíme zvolit již parabolu 4° ve tvaru : )2()( 2234 xxxaxv ⋅+⋅⋅−⋅= – splňuje podmínky: 0)0( =v , 0)0( =′v , 0)( =v a 0)( =′ v .
I. případ vzpěru:
.π304,0
31
4
4
2min
2
3
min
0
22
0
2
min.
.
JEJE
dxxa
dxaJEF energ
kr⋅⋅
⋅=⋅
⋅⋅=
⋅⋅⋅
⋅⋅⋅⋅=
∫
∫ ∆ ≈ 21,6% .
II. případ vzpěru:
.π216,1
31
4
)44(
4
2min
2
2
min
0
222
0
2
min.
.
JEJE
dxxxa
dxaJEF energ
kr⋅⋅
⋅=⋅
⋅⋅=
⋅⋅+⋅⋅−⋅
⋅⋅⋅⋅=
∫
∫ ∆ ≈ 21,6%
III. případ vzpěru:
.π040,3
152
4
)9124(
)36244(
2min
2
5
3min
0
43222
0
222
min.
.
JEJE
dxxxxa
dxxxaJEF energ
kr⋅⋅
⋅=⋅
⋅⋅⋅=
⋅⋅+⋅⋅−⋅⋅⋅
⋅⋅+⋅⋅−⋅⋅⋅⋅=
∫
∫ ∆ ≈ 48,7%
IV. případ vzpěru:
2min
2
72
52
min
0
243342562
0
4322342
min.
.
π255,4
105254
)424524816(
)448192288144(
JE
a
aJE
dxxxxxxa
dxxxxxaJEF energ
kr
⋅⋅⋅=
⋅⋅
⋅⋅⋅⋅=
=⋅⋅⋅+⋅⋅−⋅⋅+⋅⋅−⋅⋅
⋅⋅+⋅⋅−⋅⋅+⋅⋅−⋅⋅⋅⋅=
∫
∫
∆ ≈ 6,4%
x
v(x)

94
PŘÍKLAD 4.15 (METODA POSTUPNÝCH APROXIMACÍ):
Dáno: Prut délky je vyroben z tyče stálého průřezu o kvadratickém momentu průřezu Jmin a je na koncích kloubově uložen a zatížen osamělou silou F.
Určit: 𝐹𝐹𝑐𝑐𝑜𝑜 1𝑝𝑝𝑑𝑑𝑘𝑘𝑒𝑒.𝑚𝑚𝑝𝑝. (první kritická síla pomocí postupných aproximací)
∆ (chyba mezi přibližným a přesným řešením dle Eulera).
Řešení: Jako počáteční odhad použijeme sílu F0 = 1 a průhybovou čáru v0(x) navrhneme ve zcela „nesmyslném“ tvaru konstantní funkce po celé délce prutu:
axv =)(0 .
Tyto hodnoty nyní dosadíme do základní rovnice, kterou postupně integrujeme:
min1 )(
JEaxv
⋅−=′′ ⇒ 11
min1 )( Cx
JEaxv +⋅
⋅−=′ ⇒ 1211
2
min1 2
)( CxCxJEaxv +⋅+⋅
⋅−= .
Integrační konstanty C11 a C12 určíme z okrajových podmínek pro uložení řešené vzpěry:
1. x = 0: 0)0(1 =v ⇒ 012 =C
2. x = : 0)(1 =v ⇒ 2min
11
⋅⋅
=JEaC
Nyní vyjádříme poměr funkcí v0(x) a v1(x) a budeme se zabývat jeho závislostí na souřadnici x: 𝑣𝑣0(𝑚𝑚)𝑣𝑣1(𝑚𝑚)
=𝑎𝑎
𝑎𝑎𝐸𝐸 ∙ 𝐽𝐽min
∙ �ℓ ∙ x2 − 𝑚𝑚2
2 �=
𝐸𝐸 ∙ 𝐽𝐽min
ℓ2 ∙2
𝑚𝑚ℓ − �𝑚𝑚
ℓ�2 =
𝐸𝐸 ∙ 𝐽𝐽min
ℓ2 ∙ 𝑑𝑑0−1 ,
kde 𝑑𝑑0−1 představuje proměnný koeficient závislý na poloze popsané souřadnicí x:
𝑑𝑑0−1 =2
𝑚𝑚ℓ − �𝑚𝑚
ℓ�2
Tento podíl můžeme popsat pro celou délku vzpěry, ale stačí jen např. v pěti diskrétních bodech:
x 0,1⋅ 0,2⋅ 0,3⋅ 0,4⋅ 0,5⋅ ∅ ±s
𝑑𝑑0−1 22,2 12,5 9,5 8,3 8,0 12,10 5,30
Koeficient 𝑑𝑑0−1 ∈ ⟨8,0 ; 22,2⟩ popisující podíl funkcí v0(x) a v1(x) rozhodně není konstantní, ale již průměrná hodnota je 𝑑𝑑0−1 = 12,10. Po první provedené aproximaci tato hodnota představuje první dostupný výsledek:
𝐹𝐹𝑐𝑐𝑜𝑜 1𝑝𝑝𝑑𝑑𝑘𝑘𝑒𝑒.ap. 0−1 = 1,226 ∙
𝜋𝜋2 ∙ 𝐸𝐸 ∙ 𝐽𝐽min
ℓ2 .
Přesné Eulerovo řešení pro II. případ vzpěru je:
𝐹𝐹𝑐𝑐𝑜𝑜 1𝐸𝐸 II. =
𝜋𝜋2 ∙ 𝐸𝐸 ∙ 𝐽𝐽min
ℓ2 .
⇒
−
⋅⋅
⋅=
22)(
2
min1
xxJEaxv .
v0(x) = a = konst.
E⋅Jmin = konst. Fkr. = ?

Pružnost a pevnost II ZS 2018/2019
95
Chyba je po provedení 1. postupné aproximaci +22,6% oproti známému přesnému Eulerovu řešení. Z výsledků je patrné, že provedení jedné postupné aproximace k určení přesnější hodnoty Fkr. nestačí a je třeba celý postup opakovat.
Výsledkem 2. postupné aproximace je průměrná velikost kritické síly určena jako:
𝐹𝐹𝑐𝑐𝑜𝑜 1𝑝𝑝𝑑𝑑𝑘𝑘𝑒𝑒.ap. 1−2 ≈ 1,048 ∙
𝜋𝜋2 ∙ 𝐸𝐸 ∙ 𝐽𝐽min
ℓ2 .
Chyba je po provedení 2. postupné aproximaci by vycházela přibližně +5% oproti známému přesnému Eulerovu řešení. Pokud nám tato přesnost ještě nestačí, je třeba celý postup opakovat.
Po dalším zopakování celého postupu až do vyjádření poměru funkcí v2(x) a v3(x) získáme jejich poměr v závislosti na x ve tvaru:
𝑣𝑣2(𝑚𝑚)𝑣𝑣3(𝑚𝑚)
=𝐸𝐸 ∙ 𝐽𝐽min
ℓ2 ∙30 ∙ �𝑚𝑚
ℓ�4
− 60 ∙ �𝑚𝑚ℓ�
3+ 30 ∙ 𝑚𝑚
ℓ
3 ∙ 𝑚𝑚ℓ − 5 ∙ �𝑚𝑚
ℓ�3
+ 3 ∙ �𝑚𝑚ℓ�
5− �𝑚𝑚
ℓ�6 =
𝐸𝐸 ∙ 𝐽𝐽min
ℓ2 ∙ 𝑑𝑑2−3 ,
kde 𝑑𝑑2−3 představuje proměnný koeficient závislý na poloze popsané souřadnicí x:
𝑑𝑑2−3 =30 ∙ �𝑚𝑚
ℓ�4
− 60 ∙ �𝑚𝑚ℓ�
3+ 30 ∙ 𝑚𝑚
ℓ
3 ∙ 𝑚𝑚ℓ − 5 ∙ �𝑚𝑚
ℓ�3
+ 3 ∙ �𝑚𝑚ℓ�
5− �𝑚𝑚
ℓ�6
Tento podíl můžeme opět popsat pro celou délku vzpěry nebo vybrat jen pět diskrétních bodů:
x 0,1⋅ 0,2⋅ 0,3⋅ 0,4⋅ 0,5⋅ ∅ ±s
𝑑𝑑2−3 9,975 9,927 9,880 9,848 9,836 9,893 0,052
Koeficient 𝑑𝑑2−3 ∈ ⟨9,836 ; 9,975⟩ se podle tabulky již blíží konstantě a průměrná hodnota po třetí postupné aproximaci je 𝑑𝑑2−3 = 9,893. Po třech provedených postupných aproximacích zdánlivě „nesmyslný“ první odhad průhybové čáry se „doaproximoval“ přibližně do správného výsledku:
𝐹𝐹𝑐𝑐𝑜𝑜 1𝑝𝑝𝑑𝑑𝑘𝑘𝑒𝑒.ap. 2−3 = 1,00237 ∙
𝜋𝜋2 ∙ 𝐸𝐸 ∙ 𝐽𝐽min
ℓ2 .
Přesné Eulerovo řešení pro II. případ vzpěru je:
𝐹𝐹𝑐𝑐𝑜𝑜 1𝐸𝐸 II. =
𝜋𝜋2 ∙ 𝐸𝐸 ∙ 𝐽𝐽min
ℓ2 .
Chyba je jen +0,237% oproti známému přesnému Eulerovu řešení, což je hodnota dostatečně přesná, další postupné aproximace již není třeba provádět a dosaženou hodnotu lze považovat za konečný výsledek.
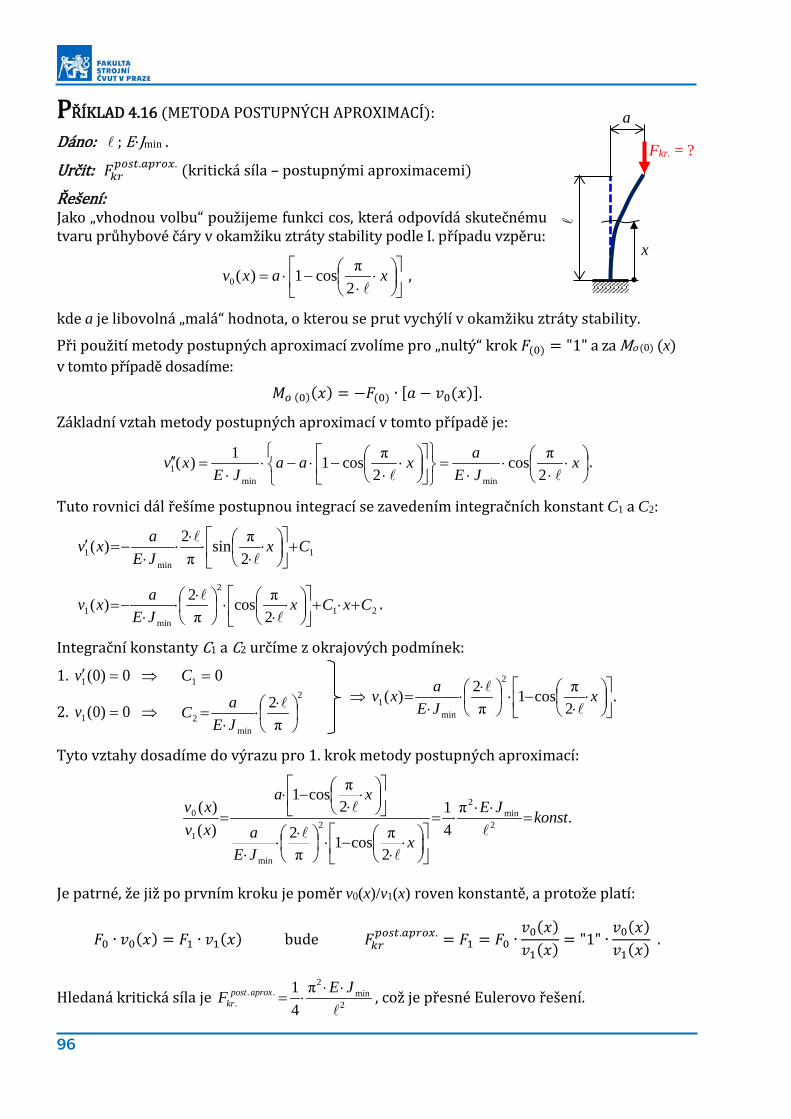
96
PŘÍKLAD 4.16 (METODA POSTUPNÝCH APROXIMACÍ):
Dáno: ; E·Jmin .
Určit: 𝐹𝐹𝑐𝑐𝑜𝑜𝑝𝑝𝑑𝑑𝑘𝑘𝑒𝑒.𝑚𝑚𝑝𝑝𝑜𝑜𝑑𝑑𝑚𝑚. (kritická síla – postupnými aproximacemi)
Řešení: Jako „vhodnou volbu“ použijeme funkci cos, která odpovídá skutečnému tvaru průhybové čáry v okamžiku ztráty stability podle I. případu vzpěru:
⋅
⋅−⋅= xaxv
2πcos1)(0 ,
kde a je libovolná „malá“ hodnota, o kterou se prut vychýlí v okamžiku ztráty stability.
Při použití metody postupných aproximací zvolíme pro „nultý“ krok 𝐹𝐹(0) = "1" a za Mo (0) (x) v tomto případě dosadíme:
𝑀𝑀𝑑𝑑 (0)(𝑚𝑚) = −𝐹𝐹(0) ∙ [𝑎𝑎 − 𝑣𝑣0(𝑚𝑚)].
Základní vztah metody postupných aproximací v tomto případě je:
⋅
⋅⋅
⋅=
⋅
⋅−⋅−⋅
⋅=′′ x
JEaxaa
JExv
2πcos
2πcos11)(
minmin1 .
Tuto rovnici dál řešíme postupnou integrací se zavedením integračních konstant C1 a C2:
1min
1 2πsin
π2)( Cx
JEaxv +
⋅
⋅⋅
⋅⋅
⋅−=′
21
2
min1 2
πcosπ
2)( CxCxJEaxv +⋅+
⋅
⋅⋅
⋅⋅
⋅−=
.
Integrační konstanty C1 a C2 určíme z okrajových podmínek:
1. 0)0(1 =′v ⇒ 01 =C
2. 0)0(1 =v ⇒ 2
min2 π
2
⋅⋅
⋅=
JEaC
Tyto vztahy dosadíme do výrazu pro 1. krok metody postupných aproximací:
.π41
2πcos1
π2
2πcos1
)()(
2min
2
2
min
1
0 konstJE
xJEa
xa
xvxv
=⋅⋅
⋅=
⋅
⋅−⋅
⋅⋅
⋅
⋅
⋅−⋅
=
Je patrné, že již po prvním kroku je poměr v0(x)/v1(x) roven konstantě, a protože platí:
𝐹𝐹0 ∙ 𝑣𝑣0(𝑚𝑚) = 𝐹𝐹1 ∙ 𝑣𝑣1(𝑚𝑚) bude 𝐹𝐹𝑐𝑐𝑜𝑜𝑝𝑝𝑑𝑑𝑘𝑘𝑒𝑒.𝑚𝑚𝑝𝑝𝑜𝑜𝑑𝑑𝑚𝑚. = 𝐹𝐹1 = 𝐹𝐹0 ∙
𝑣𝑣0(𝑚𝑚)𝑣𝑣1(𝑚𝑚) = "1" ∙
𝑣𝑣0(𝑚𝑚)𝑣𝑣1(𝑚𝑚) .
Hledaná kritická síla je 2min
2..
.π
41
JEF aproxpostkr
⋅⋅⋅= , což je přesné Eulerovo řešení.
.2πcos1
π2)(
2
min1
⋅
⋅−⋅
⋅⋅
⋅=⇒ x
JEaxv
a
x
Fkr. = ?
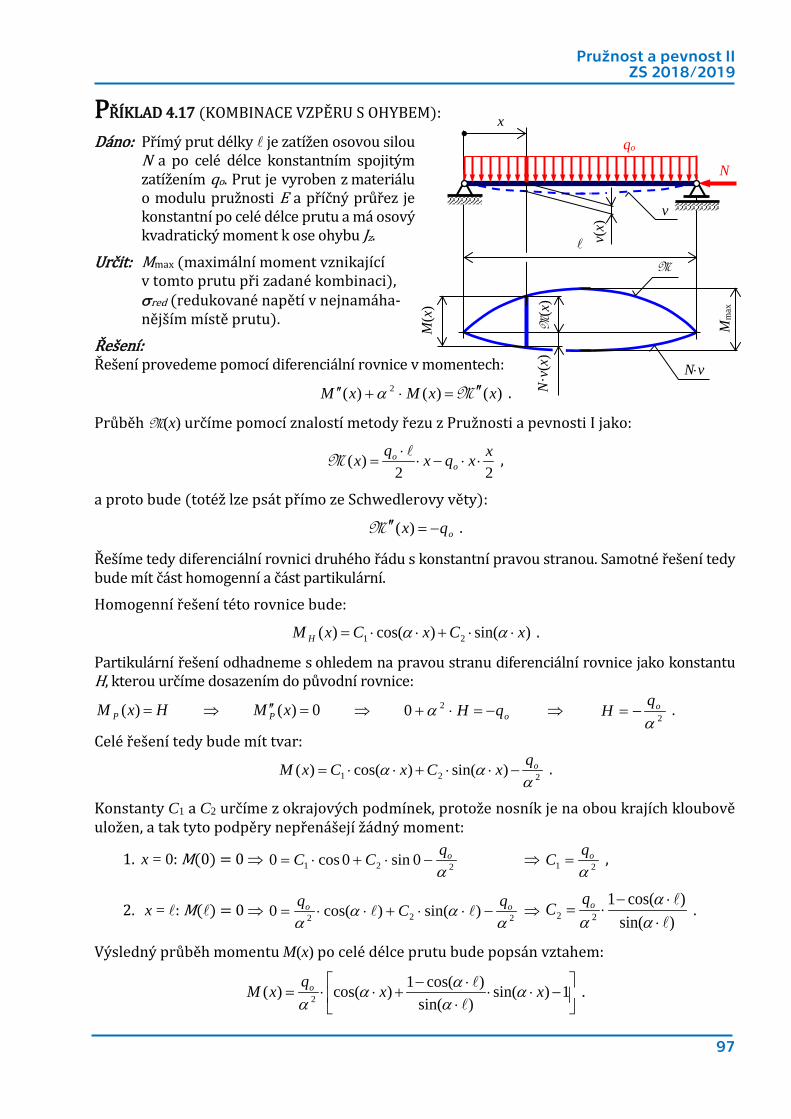
Pružnost a pevnost II ZS 2018/2019
97
PŘÍKLAD 4.17 (KOMBINACE VZPĚRU S OHYBEM):
Dáno: Přímý prut délky je zatížen osovou silou N a po celé délce konstantním spojitým zatížením qo. Prut je vyroben z materiálu o modulu pružnosti E a příčný průřez je konstantní po celé délce prutu a má osový kvadratický moment k ose ohybu Jz.
Určit: Mmax (maximální moment vznikající v tomto prutu při zadané kombinaci),
σred (redukované napětí v nejnamáha-nějším místě prutu).
Řešení: Řešení provedeme pomocí diferenciální rovnice v momentech:
)()()( 2 xxMxM M ′′=⋅+′′ α .
Průběh M(x) určíme pomocí znalostí metody řezu z Pružnosti a pevnosti I jako:
22)( xxqxqx o
o ⋅⋅−⋅⋅
=M ,
a proto bude (totéž lze psát přímo ze Schwedlerovy věty):
oqx −=′′ )(M .
Řešíme tedy diferenciální rovnici druhého řádu s konstantní pravou stranou. Samotné řešení tedy bude mít část homogenní a část partikulární.
Homogenní řešení této rovnice bude:
)sin()cos()( 21 xCxCxM H ⋅⋅+⋅⋅= αα .
Partikulární řešení odhadneme s ohledem na pravou stranu diferenciální rovnice jako konstantu H, kterou určíme dosazením do původní rovnice:
HxM P =)( ⇒ 0)( =′′ xM P ⇒ oqH −=⋅+ 20 α ⇒ 2αoq
H −= .
Celé řešení tedy bude mít tvar:
221 )sin()cos()(α
αα oqxCxCxM −⋅⋅+⋅⋅= .
Konstanty C1 a C2 určíme z okrajových podmínek, protože nosník je na obou krajích kloubově uložen, a tak tyto podpěry nepřenášejí žádný moment:
1. x = 0: M(0) = 0 ⇒ 221 0sin0cos0α
oqCC −⋅+⋅= ⇒ 21 αoqC = ,
2. x = : M() = 0 ⇒ 222 )sin()cos(0α
ααα
oo qCq−⋅⋅+⋅⋅= ⇒
)sin()cos(1
22
⋅⋅−
⋅=α
αα
oqC .
Výsledný průběh momentu M(x) po celé délce prutu bude popsán vztahem:
−⋅⋅
⋅⋅−
+⋅⋅= 1)sin()sin(
)cos(1)cos()( 2 xxqxM o αα
ααα
.
M(x
)
M(x
)
N·v
(x)
v(x)
x
N
qo
M
N⋅v
v
Mm
ax

98
Při použití matematických vztahů pro poloviční úhly bychom dostali „zjednodušený“ tvar:
22
⋅
⋅=⋅αα ⇒
−⋅⋅
⋅
+⋅⋅= 1)sin(2
tan)cos()( 2 xxqxM o αααα
.
Místo, kde dosáhne výsledný moment M(x) maximální hodnoty Mmax bychom obecně určovali pomocí derivace podle souřadnice:
0)(=
dxxdM .
Z této podmínky získáme hodnotu xextr.− místo extrému funkce M(x) – a tuto hodnotu dosadíme do původní rovnice vyjadřující průběh momentu po celé délce prutu:
)( extr.max xMM = .
V našem případě ale využijeme symetrie úlohy, kdy víme, že maximální moment Mmax bude právě uprostřed řešeného prutu (xextr. = /2):
−
⋅
⋅
⋅
+
⋅
⋅=
= 1
2sin
2tan
2cos
2 2max ααα
αoqMM .
Tento výraz můžeme opět ještě zjednodušit využitím vztahů pro poloviční úhly:
⋅
⋅
−⋅=
2cos
2cos1
2max
α
α
αoqM .
Pokud ještě v tomto vztahu zavedeme novou proměnnou 2⋅
=αu ⇒ 2
2
2 41
u⋅=
α ,
můžeme pomocí těchto vztahů vyjádřit maximální moment Mmax jako:
ψ⋅=⋅−⋅
⋅⋅
=−
⋅⋅⋅
= max2
2
2
2
max cos)cos1(2
8coscos1
4M
uuuq
uu
uqM oo
.
Maximální moment od příčného zatížení Mmax je tedy násoben koeficientem ψ, který je funkcí proměnné u resp. součinu α⋅ a lze dokázat, že ψ(α⋅) > 1 a tedy Mmax > Mmax.
Největší redukované napětí vznikne uprostřed prutu a jeho velikost bude:
𝜎𝜎𝑜𝑜𝑐𝑐𝑑𝑑 =𝑀𝑀max
𝑊𝑊𝑑𝑑+ �−
𝑁𝑁𝐴𝐴
� ≤ 𝜎𝜎𝐷𝐷
Poznámka: Známe-li průběh momentu M(x), můžeme rovnici popisující průhyb prutu v(x) namáhaného kombinací vzpěru a ohybu určit z Bernoulliho diferenciální rovnice průhybové čáry (viz PP I):
zJExMxv
⋅−=′′ )()( ⇒
−⋅⋅
⋅
+⋅⋅⋅⋅
−=′′ 1)sin(2
tan)cos()( 2 xxJEqxv
z
o αααα
.
Postupnou integrací dostaneme řešení se dvěma integračními konstantami K1 a K2. Ty opět určíme z okrajových podmínek na obou podepřených koncích, kde je nosník kloubově uložen a nemůže se tedy v těchto bodech prohnout: 1. x = 0: v(0) = 0
⇒ K1 a K2 . 2. x = : v() = 0 Výsledný vztah v(x) popisující průhyb prutu při zadané kombinaci vzpěru s ohybem by vycházel vzhledem k předchozím výsledkům poměrně složitý.
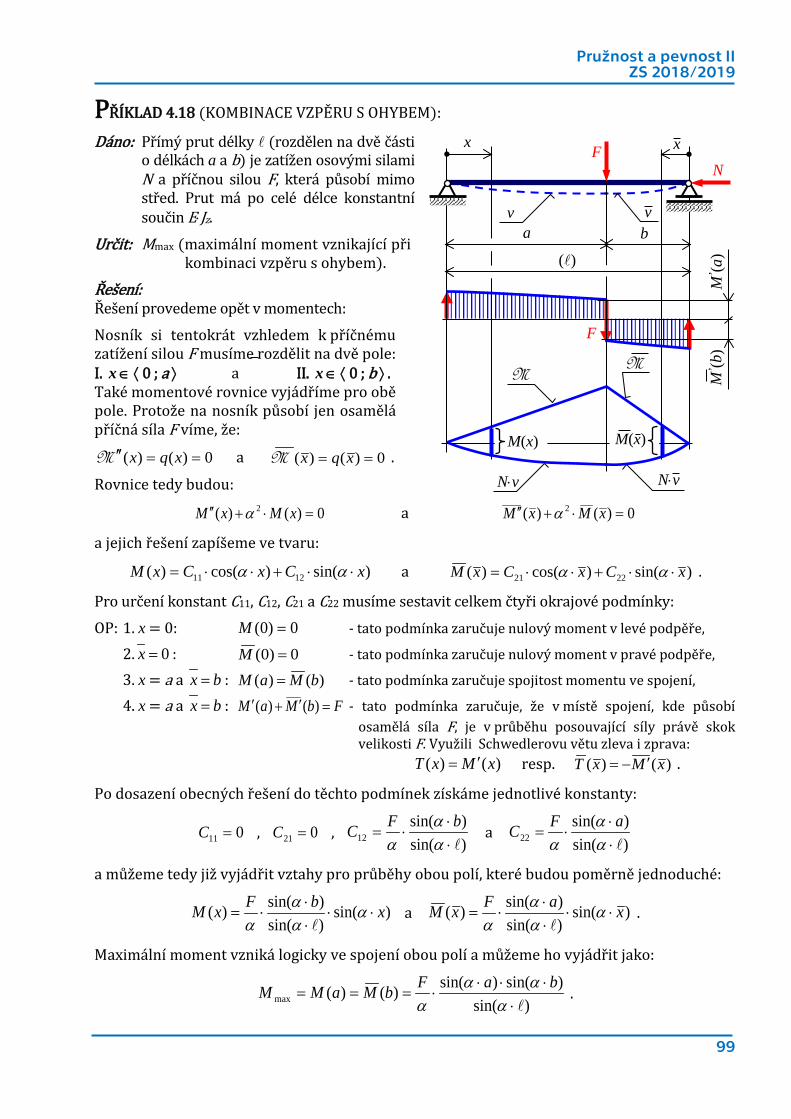
Pružnost a pevnost II ZS 2018/2019
99
PŘÍKLAD 4.18 (KOMBINACE VZPĚRU S OHYBEM):
Dáno: Přímý prut délky (rozdělen na dvě části o délkách a a b) je zatížen osovými silami N a příčnou silou F, která působí mimo střed. Prut má po celé délce konstantní součin E⋅Jz.
Určit: Mmax (maximální moment vznikající při kombinaci vzpěru s ohybem).
Řešení: Řešení provedeme opět v momentech:
Nosník si tentokrát vzhledem k příčnému zatížení silou F musíme rozdělit na dvě pole: I. x ∈ ⟨ 0 ; a ⟩ a II. x ∈ ⟨ 0 ; b ⟩ . Také momentové rovnice vyjádříme pro obě pole. Protože na nosník působí jen osamělá příčná síla F víme, že:
0)()( ==′′ xqxM a 0)()( == xqxM .
Rovnice tedy budou:
0)()( 2 =⋅+′′ xMxM α a 0)()( 2 =⋅+′′ xMxM α
a jejich řešení zapíšeme ve tvaru:
)sin()cos()( 1211 xCxCxM ⋅⋅+⋅⋅= αα a )sin()cos()( 2221 xCxCxM ⋅⋅+⋅⋅= αα .
Pro určení konstant C11, C12, C21 a C22 musíme sestavit celkem čtyři okrajové podmínky:
OP: 1. x = 0: 0)0( =M - tato podmínka zaručuje nulový moment v levé podpěře,
2. 0=x : 0)0( =M - tato podmínka zaručuje nulový moment v pravé podpěře,
3. x = a a bx = : )()( bMaM = - tato podmínka zaručuje spojitost momentu ve spojení,
4. x = a a bx = : FbMaM =′+′ )()( - tato podmínka zaručuje, že v místě spojení, kde působí osamělá síla F, je v průběhu posouvající síly právě skok velikosti F. Využili Schwedlerovu větu zleva i zprava:
)()( xMxT ′= resp. )()( xMxT ′−= .
Po dosazení obecných řešení do těchto podmínek získáme jednotlivé konstanty:
011 =C , 021 =C , )sin()sin(
12⋅
⋅⋅=
αα
αbFC a
)sin()sin(
22⋅
⋅⋅=
αα
αaFC
a můžeme tedy již vyjádřit vztahy pro průběhy obou polí, které budou poměrně jednoduché:
)sin()sin()sin()( xbFxM ⋅⋅
⋅⋅
⋅= ααα
α a )sin(
)sin()sin()( xaFxM ⋅⋅
⋅⋅
⋅= ααα
α .
Maximální moment vzniká logicky ve spojení obou polí a můžeme ho vyjádřit jako:
)sin()sin()sin()()(max
⋅⋅⋅⋅
⋅===α
ααα
baFbMaMM .
a
N F
()
N⋅v
b
x x
v v
N⋅v
M M
M’ (a
) M
’ (b)
M(x) M(x)
F
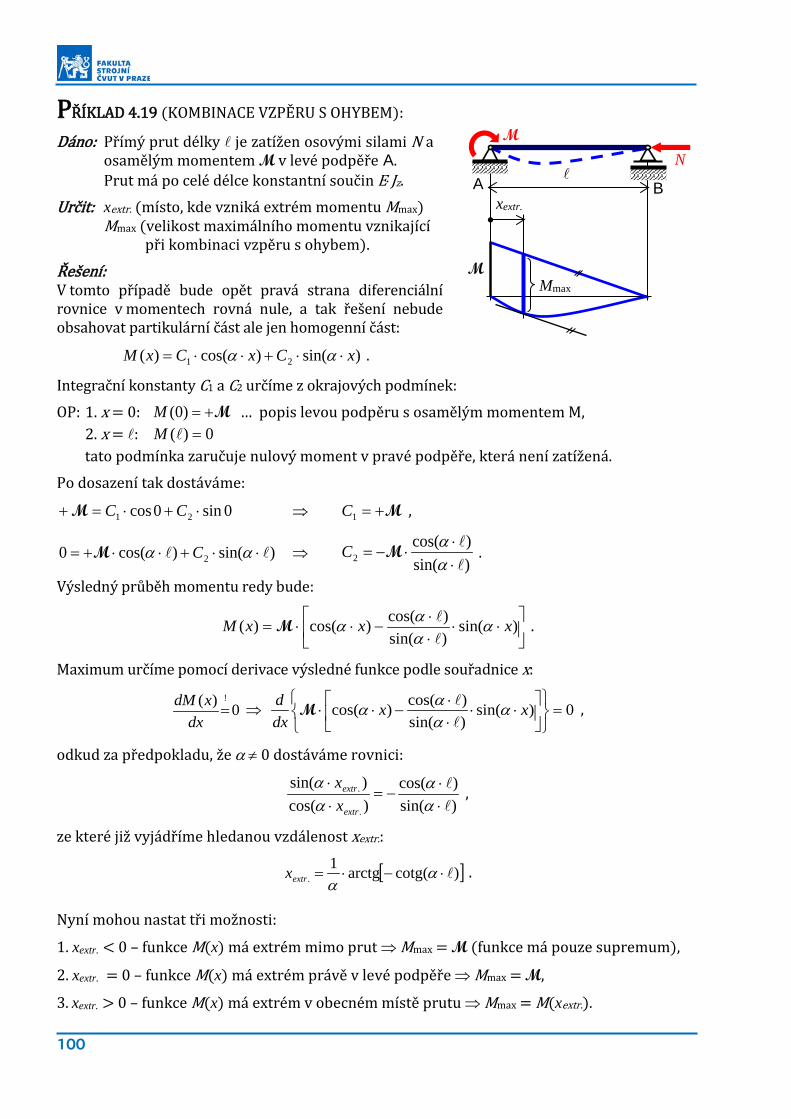
100
PŘÍKLAD 4.19 (KOMBINACE VZPĚRU S OHYBEM):
Dáno: Přímý prut délky je zatížen osovými silami N a osamělým momentem M v levé podpěře A. Prut má po celé délce konstantní součin E⋅Jz.
Určit: xextr. (místo, kde vzniká extrém momentu Mmax) Mmax (velikost maximálního momentu vznikající
při kombinaci vzpěru s ohybem).
Řešení: V tomto případě bude opět pravá strana diferenciální rovnice v momentech rovná nule, a tak řešení nebude obsahovat partikulární část ale jen homogenní část:
)sin()cos()( 21 xCxCxM ⋅⋅+⋅⋅= αα .
Integrační konstanty C1 a C2 určíme z okrajových podmínek:
OP: 1. x = 0: M+=)0(M … popis levou podpěru s osamělým momentem M, 2. x = : 0)( =M
tato podmínka zaručuje nulový moment v pravé podpěře, která není zatížená.
Po dosazení tak dostáváme:
0sin0cos 21 ⋅+⋅=+ CCM ⇒ M+=1C ,
)sin()cos(0 2 ⋅⋅+⋅⋅+= αα CM ⇒ )sin()cos(
2
⋅⋅
⋅−=αα
MC .
Výsledný průběh momentu redy bude:
⋅⋅
⋅⋅
−⋅⋅= )sin()sin()cos()cos()( xxxM α
ααα
M .
Maximum určíme pomocí derivace výsledné funkce podle souřadnice x:
0)( !=
dxxdM ⇒ 0)sin(
)sin()cos()cos( =
⋅⋅
⋅⋅
−⋅⋅ xxdxd α
ααα
M ,
odkud za předpokladu, že α ≠ 0 dostáváme rovnici:
)sin()cos(
)cos()sin(
.
.
⋅⋅
−=⋅⋅
αα
αα
extr
extr
xx
,
ze které již vyjádříme hledanou vzdálenost xextr.:
[ ])cotg(arctg1. ⋅−⋅= α
αextrx .
Nyní mohou nastat tři možnosti:
1. xextr. < 0 – funkce M(x) má extrém mimo prut ⇒ Mmax = M (funkce má pouze supremum),
2. xextr. = 0 – funkce M(x) má extrém právě v levé podpěře ⇒ Mmax = M,
3. xextr. > 0 – funkce M(x) má extrém v obecném místě prutu ⇒ Mmax = M(xextr.).
A B
N
M
Mmax
xextr.
M
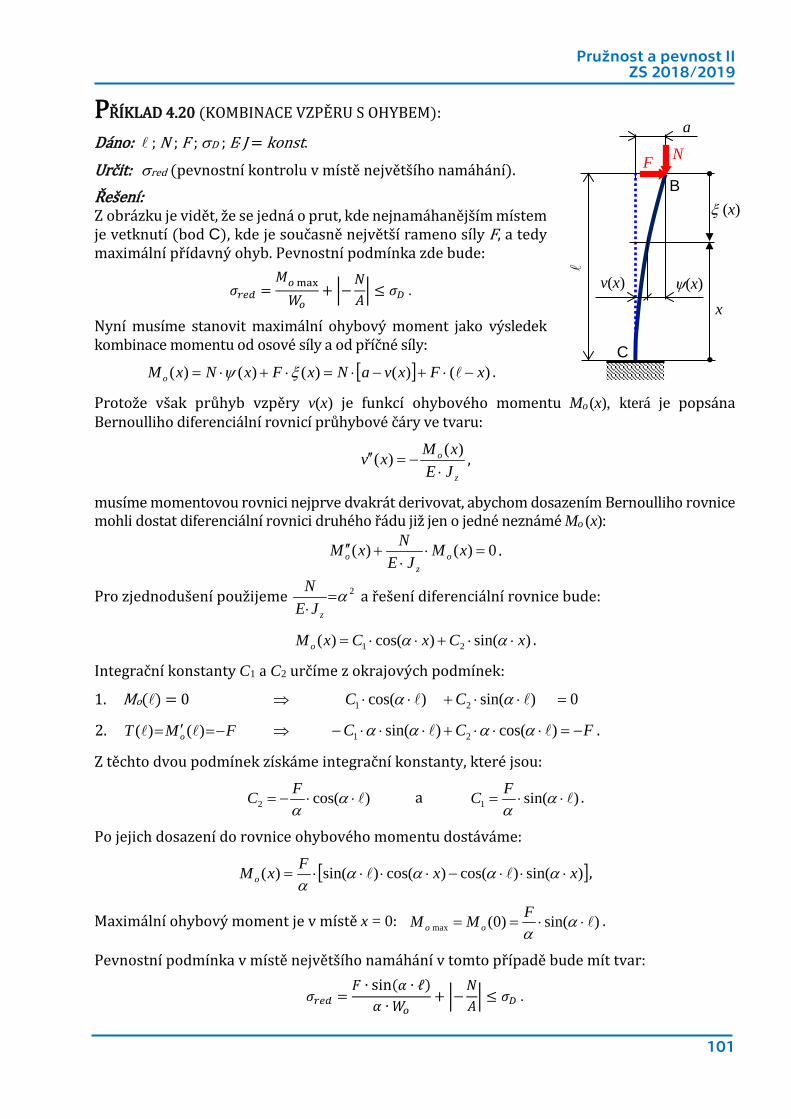
Pružnost a pevnost II ZS 2018/2019
101
PŘÍKLAD 4.20 (KOMBINACE VZPĚRU S OHYBEM):
Dáno: ; N ; F ; σD ; E⋅J = konst.
Určit: σred (pevnostní kontrolu v místě největšího namáhání).
Řešení: Z obrázku je vidět, že se jedná o prut, kde nejnamáhanějším místem je vetknutí (bod C), kde je současně největší rameno síly F, a tedy maximální přídavný ohyb. Pevnostní podmínka zde bude:
𝜎𝜎𝑜𝑜𝑐𝑐𝑑𝑑 =𝑀𝑀𝑑𝑑 max
𝑊𝑊𝑑𝑑+ �−
𝑁𝑁𝐴𝐴� ≤ 𝜎𝜎𝐷𝐷 .
Nyní musíme stanovit maximální ohybový moment jako výsledek kombinace momentu od osové síly a od příčné síly:
[ ] )()()()()( xFxvaNxFxNxM o −⋅+−⋅=⋅+⋅= ξψ .
Protože však průhyb vzpěry v(x) je funkcí ohybového momentu Mo (x), která je popsána Bernoulliho diferenciální rovnicí průhybové čáry ve tvaru:
z
o
JExMxv
⋅−=′′ )()( ,
musíme momentovou rovnici nejprve dvakrát derivovat, abychom dosazením Bernoulliho rovnice mohli dostat diferenciální rovnici druhého řádu již jen o jedné neznámé Mo (x):
0)()( =⋅⋅
+′′ xMJE
NxM oz
o .
Pro zjednodušení použijeme 2α=⋅ zJEN a řešení diferenciální rovnice bude:
)sin()cos()( 21 xCxCxM o ⋅⋅+⋅⋅= αα .
Integrační konstanty C1 a C2 určíme z okrajových podmínek:
1. Mo() = 0 ⇒ 0)sin()cos( 21 =⋅⋅+⋅⋅ αα CC
2. FMT o −=′= )()( ⇒ FCC −=⋅⋅⋅+⋅⋅⋅− )cos()sin( 21 αααα .
Z těchto dvou podmínek získáme integrační konstanty, které jsou:
)cos(2 ⋅⋅−= ααFC a )sin(1 ⋅⋅= α
αFC .
Po jejich dosazení do rovnice ohybového momentu dostáváme:
[ ])sin()cos()cos()sin()( xxFxM o ⋅⋅⋅−⋅⋅⋅⋅= ααααα
,
Maximální ohybový moment je v místě x = 0: )sin()0(max ⋅⋅== ααFMM oo .
Pevnostní podmínka v místě největšího namáhání v tomto případě bude mít tvar:
𝜎𝜎𝑜𝑜𝑐𝑐𝑑𝑑 =𝐹𝐹 ∙ sin(𝛼𝛼 ∙ ℓ)
𝛼𝛼 ∙ 𝑊𝑊𝑑𝑑+ �−
𝑁𝑁𝐴𝐴� ≤ 𝜎𝜎𝐷𝐷 .
a
ξ (x)
x
v(x)
N F
C
B
ψ(x)
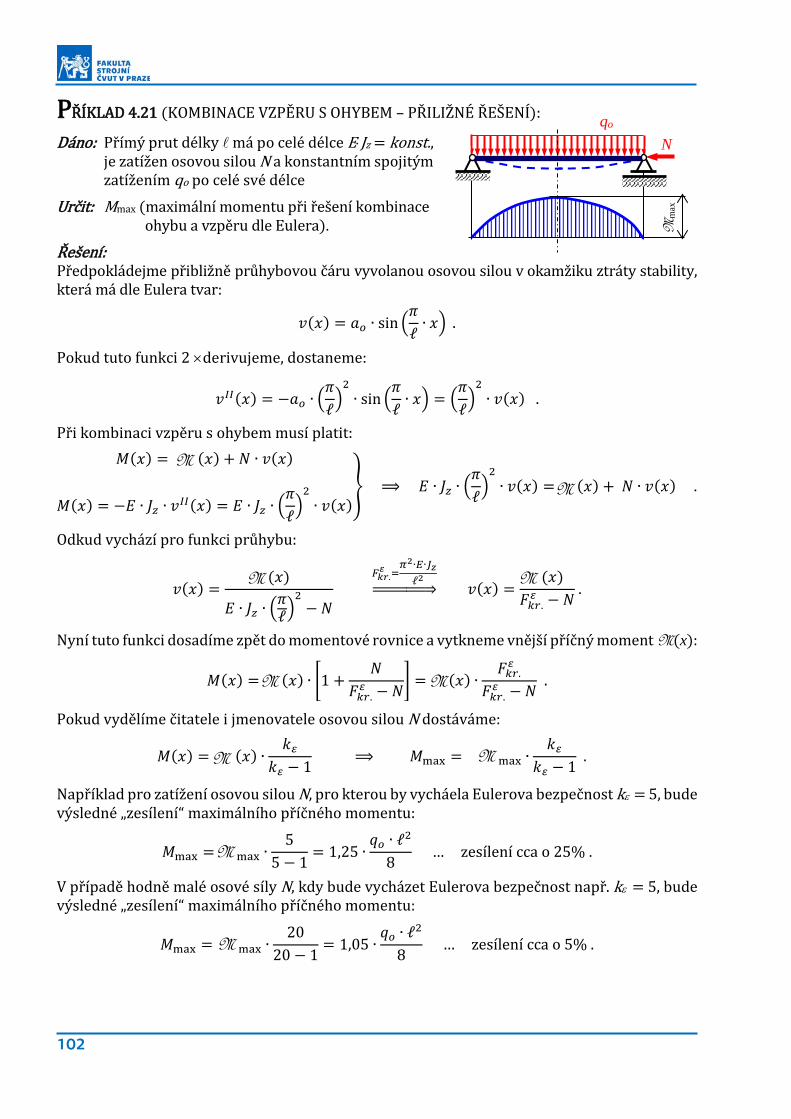
102
PŘÍKLAD 4.21 (KOMBINACE VZPĚRU S OHYBEM – PŘILIŽNÉ ŘEŠENÍ):
Dáno: Přímý prut délky má po celé délce E⋅Jz = konst., je zatížen osovou silou N a konstantním spojitým zatížením qo po celé své délce
Určit: Mmax (maximální momentu při řešení kombinace ohybu a vzpěru dle Eulera).
Řešení: Předpokládejme přibližně průhybovou čáru vyvolanou osovou silou v okamžiku ztráty stability, která má dle Eulera tvar:
𝑣𝑣(𝑚𝑚) = 𝑎𝑎𝑑𝑑 ∙ sin �𝜋𝜋ℓ
∙ 𝑚𝑚� .
Pokud tuto funkci 2 ×derivujeme, dostaneme:
𝑣𝑣𝐼𝐼𝐼𝐼(𝑚𝑚) = −𝑎𝑎𝑑𝑑 ∙ �𝜋𝜋ℓ
�2
∙ sin �𝜋𝜋ℓ
∙ 𝑚𝑚� = �𝜋𝜋ℓ
�2
∙ 𝑣𝑣(𝑚𝑚) .
Při kombinaci vzpěru s ohybem musí platit: 𝑀𝑀(𝑚𝑚) = (𝑚𝑚) + 𝑁𝑁 ∙ 𝑣𝑣(𝑚𝑚)
𝑀𝑀(𝑚𝑚) = −𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧 ∙ 𝑣𝑣𝐼𝐼𝐼𝐼(𝑚𝑚) = 𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧 ∙ �𝜋𝜋ℓ
�2
∙ 𝑣𝑣(𝑚𝑚)� ⟹ 𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧 ∙ �
𝜋𝜋ℓ
�2
∙ 𝑣𝑣(𝑚𝑚) = (𝑚𝑚) + 𝑁𝑁 ∙ 𝑣𝑣(𝑚𝑚) .
Odkud vychází pro funkci průhybu:
𝑣𝑣(𝑚𝑚) =(𝑚𝑚)
𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧 ∙ �𝜋𝜋ℓ�
2− 𝑁𝑁
𝐹𝐹𝑘𝑘𝑘𝑘.
𝜀𝜀 =𝜋𝜋2∙𝐸𝐸∙𝐽𝐽𝑧𝑧
ℓ2��������� 𝑣𝑣(𝑚𝑚) =
(𝑚𝑚)𝐹𝐹𝑐𝑐𝑜𝑜.
𝜀𝜀 − 𝑁𝑁 .
Nyní tuto funkci dosadíme zpět do momentové rovnice a vytkneme vnější příčný moment M(x):
𝑀𝑀(𝑚𝑚) = (𝑚𝑚) ∙ �1 +𝑁𝑁
𝐹𝐹𝑐𝑐𝑜𝑜.𝜀𝜀 − 𝑁𝑁
� = (𝑚𝑚) ∙𝐹𝐹𝑐𝑐𝑜𝑜.
𝜀𝜀
𝐹𝐹𝑐𝑐𝑜𝑜.𝜀𝜀 − 𝑁𝑁
.
Pokud vydělíme čitatele i jmenovatele osovou silou N dostáváme:
𝑀𝑀(𝑚𝑚) = (𝑚𝑚) ∙𝑘𝑘𝜀𝜀
𝑘𝑘𝜀𝜀 − 1 ⟹ 𝑀𝑀max = max ∙
𝑘𝑘𝜀𝜀
𝑘𝑘𝜀𝜀 − 1 .
Například pro zatížení osovou silou N, pro kterou by vycháela Eulerova bezpečnost kε = 5, bude výsledné „zesílení“ maximálního příčného momentu:
𝑀𝑀max = max ∙5
5 − 1= 1,25 ∙
𝑞𝑞𝑑𝑑 ∙ ℓ2
8 … zesílení cca o 25% .
V případě hodně malé osové síly N, kdy bude vycházet Eulerova bezpečnost např. kε = 5, bude výsledné „zesílení“ maximálního příčného momentu:
𝑀𝑀max = max ∙20
20 − 1= 1,05 ∙
𝑞𝑞𝑑𝑑 ∙ ℓ2
8 … zesílení cca o 5% .
N qo
Mm
ax
M M
M M
M
M
M M
M M
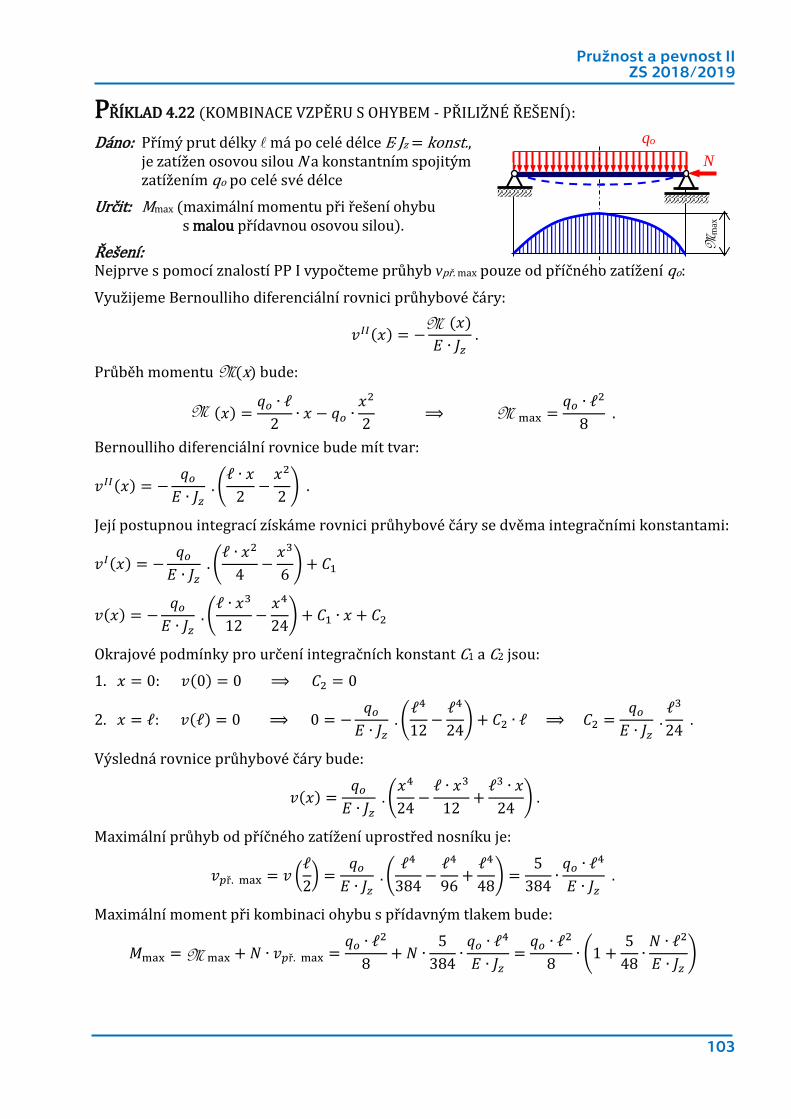
Pružnost a pevnost II ZS 2018/2019
103
PŘÍKLAD 4.22 (KOMBINACE VZPĚRU S OHYBEM - PŘILIŽNÉ ŘEŠENÍ):
Dáno: Přímý prut délky má po celé délce E⋅Jz = konst., je zatížen osovou silou N a konstantním spojitým zatížením qo po celé své délce
Určit: Mmax (maximální momentu při řešení ohybu s malou přídavnou osovou silou).
Řešení: Nejprve s pomocí znalostí PP I vypočteme průhyb vpř. max pouze od příčného zatížení qo:
Využijeme Bernoulliho diferenciální rovnici průhybové čáry:
𝑣𝑣𝐼𝐼𝐼𝐼(𝑚𝑚) = − (𝑚𝑚)𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧
.
Průběh momentu M(x) bude:
(𝑚𝑚) =𝑞𝑞𝑑𝑑 ∙ ℓ
2∙ 𝑚𝑚 − 𝑞𝑞𝑑𝑑 ∙
𝑚𝑚2
2 ⟹ max =
𝑞𝑞𝑑𝑑 ∙ ℓ2
8 .
Bernoulliho diferenciální rovnice bude mít tvar:
𝑣𝑣𝐼𝐼𝐼𝐼(𝑚𝑚) = −𝑞𝑞𝑑𝑑
𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧 . �
ℓ ∙ 𝑚𝑚2
−𝑚𝑚2
2� .
Její postupnou integrací získáme rovnici průhybové čáry se dvěma integračními konstantami:
𝑣𝑣𝐼𝐼(𝑚𝑚) = −𝑞𝑞𝑑𝑑
𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧 . �
ℓ ∙ 𝑚𝑚2
4−
𝑚𝑚3
6� + 𝐶𝐶1
𝑣𝑣(𝑚𝑚) = −𝑞𝑞𝑑𝑑
𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧 . �
ℓ ∙ 𝑚𝑚3
12−
𝑚𝑚4
24� + 𝐶𝐶1 ∙ 𝑚𝑚 + 𝐶𝐶2
Okrajové podmínky pro určení integračních konstant C1 a C2 jsou:
1. 𝑚𝑚 = 0: 𝑣𝑣(0) = 0 ⟹ 𝐶𝐶2 = 0
2. 𝑚𝑚 = ℓ: 𝑣𝑣(ℓ) = 0 ⟹ 0 = −𝑞𝑞𝑑𝑑
𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧 . �
ℓ4
12−
ℓ4
24� + 𝐶𝐶2 ∙ ℓ ⟹ 𝐶𝐶2 =
𝑞𝑞𝑑𝑑
𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧 .
ℓ3
24 .
Výsledná rovnice průhybové čáry bude:
𝑣𝑣(𝑚𝑚) =𝑞𝑞𝑑𝑑
𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧 . �
𝑚𝑚4
24−
ℓ ∙ 𝑚𝑚3
12+
ℓ3 ∙ 𝑚𝑚24
� .
Maximální průhyb od příčného zatížení uprostřed nosníku je:
𝑣𝑣𝑝𝑝ř. max = 𝑣𝑣 �ℓ2
� =𝑞𝑞𝑑𝑑
𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧 . �
ℓ4
384−
ℓ4
96+
ℓ4
48� =
5384
∙𝑞𝑞𝑑𝑑 ∙ ℓ4
𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧 .
Maximální moment při kombinaci ohybu s přídavným tlakem bude:
𝑀𝑀max = max + 𝑁𝑁 ∙ 𝑣𝑣𝑝𝑝ř. max =𝑞𝑞𝑑𝑑 ∙ ℓ2
8+ 𝑁𝑁 ∙
5384
∙𝑞𝑞𝑑𝑑 ∙ ℓ4
𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧=
𝑞𝑞𝑑𝑑 ∙ ℓ2
8∙ �1 +
548
∙𝑁𝑁 ∙ ℓ2
𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧�
N qo
Mm
ax
M
M M
M
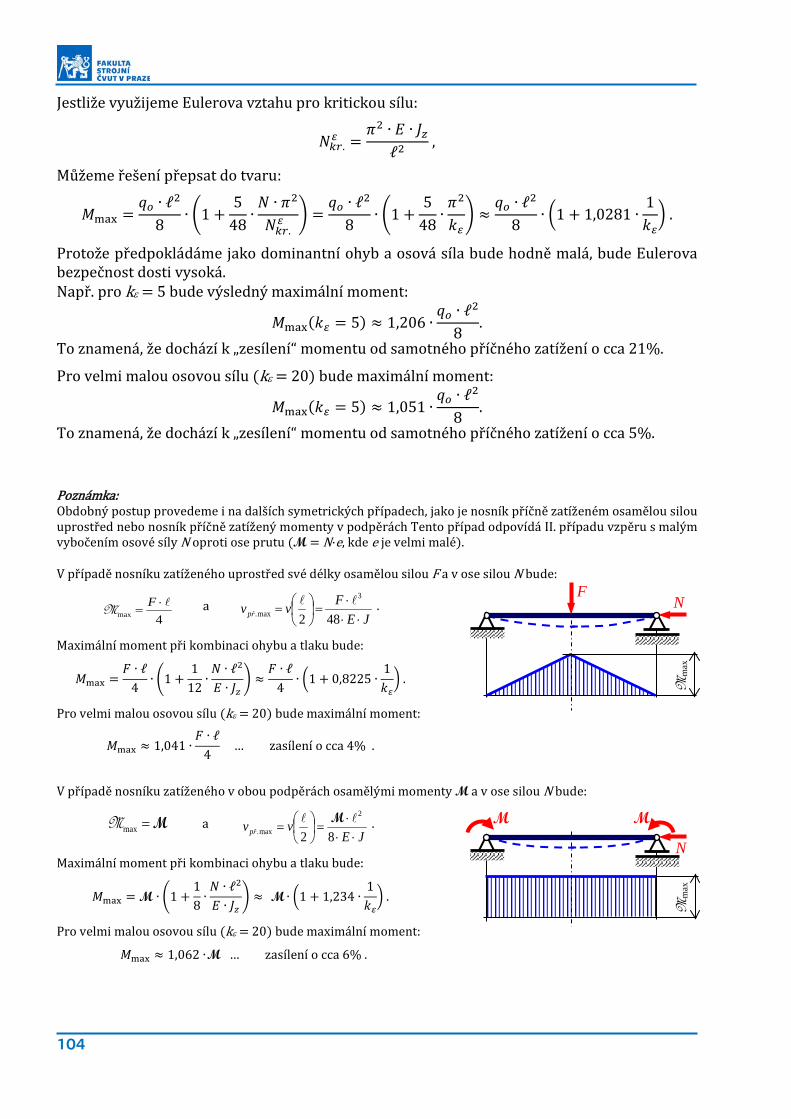
104
Jestliže využijeme Eulerova vztahu pro kritickou sílu:
𝑁𝑁𝑐𝑐𝑜𝑜.𝜀𝜀 =
𝜋𝜋2 ∙ 𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧
ℓ2 ,
Můžeme řešení přepsat do tvaru:
𝑀𝑀max =𝑞𝑞𝑑𝑑 ∙ ℓ2
8∙ �1 +
548
∙𝑁𝑁 ∙ 𝜋𝜋2
𝑁𝑁𝑐𝑐𝑜𝑜.𝜀𝜀 � =
𝑞𝑞𝑑𝑑 ∙ ℓ2
8∙ �1 +
548
∙𝜋𝜋2
𝑘𝑘𝜀𝜀� ≈
𝑞𝑞𝑑𝑑 ∙ ℓ2
8∙ �1 + 1,0281 ∙
1𝑘𝑘𝜀𝜀
� .
Protože předpokládáme jako dominantní ohyb a osová síla bude hodně malá, bude Eulerova bezpečnost dosti vysoká. Např. pro kε = 5 bude výsledný maximální moment:
𝑀𝑀max(𝑘𝑘𝜀𝜀 = 5) ≈ 1,206 ∙𝑞𝑞𝑑𝑑 ∙ ℓ2
8.
To znamená, že dochází k „zesílení“ momentu od samotného příčného zatížení o cca 21%.
Pro velmi malou osovou sílu (kε = 20) bude maximální moment:
𝑀𝑀max(𝑘𝑘𝜀𝜀 = 5) ≈ 1,051 ∙𝑞𝑞𝑑𝑑 ∙ ℓ2
8.
To znamená, že dochází k „zesílení“ momentu od samotného příčného zatížení o cca 5%.
Poznámka: Obdobný postup provedeme i na dalších symetrických případech, jako je nosník příčně zatíženém osamělou silou uprostřed nebo nosník příčně zatížený momenty v podpěrách Tento případ odpovídá II. případu vzpěru s malým vybočením osové síly N oproti ose prutu (M = N·e, kde e je velmi malé). V případě nosníku zatíženého uprostřed své délky osamělou silou F a v ose silou N bude:
4max⋅
=FM a
JEFvvpř ⋅⋅
⋅=
=
482
3
max. .
Maximální moment při kombinaci ohybu a tlaku bude:
𝑀𝑀max =𝐹𝐹 ∙ ℓ
4∙ �1 +
112
∙𝑁𝑁 ∙ ℓ2
𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧� ≈
𝐹𝐹 ∙ ℓ4
∙ �1 + 0,8225 ∙1𝑘𝑘𝜀𝜀
� .
Pro velmi malou osovou sílu (kε = 20) bude maximální moment:
𝑀𝑀max ≈ 1,041 ∙𝐹𝐹 ∙ ℓ
4 … zasílení o cca 4% .
V případě nosníku zatíženého v obou podpěrách osamělými momenty M a v ose silou N bude:
M=maxM a JE
vvpř ⋅⋅⋅
=
=
82
2
max. M .
Maximální moment při kombinaci ohybu a tlaku bude:
𝑀𝑀max = ∙ �1 +18
∙𝑁𝑁 ∙ ℓ2
𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧� ≈ ∙ �1 + 1,234 ∙
1𝑘𝑘𝜀𝜀
� .
Pro velmi malou osovou sílu (kε = 20) bude maximální moment:
𝑀𝑀max ≈ 1,062 ∙ … zasílení o cca 6% .
F N
Mm
ax
M
N
Mm
ax
M
M M
M

Pružnost a pevnost II ZS 2018/2019
105
PŘÍKLAD 4.23 (KOMBINACE VZPĚRU S OHYBEM – PŘILIŽNÉ ŘEŠENÍ):
Dáno: Přímý prut délky má po celé délce E⋅Jz = konst., je zatížen osovou silou N a osamělým momentem M na svém pravém konci.
Určit: Mmax (maximální momentu při řešení ohybu s malou přídavnou osovou silou).
Řešení: V případě nosníku zatíženého osamělým momentem M bude při postupu zleva platit pro M (x) a z toho vypočteme průhyb v(x) pomocí Bernoulliho rovnice:
xMx ⋅=
)(M ⇒
−⋅⋅
⋅⋅=
3
6)( xx
JEMxv
z
.
Pokud chceme najít extrém funkce v(x), musíme její první derivaci položit rovnu nule a dostáváme:
𝜕𝜕𝑣𝑣(𝑚𝑚)𝜕𝜕𝑚𝑚
=𝑀𝑀
6 ∙ 𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧∙ �ℓ −
3 ∙ 𝑚𝑚2
ℓ� = 0
𝑀𝑀𝐸𝐸∙𝐽𝐽𝑧𝑧
≠0
����� 𝑚𝑚𝑐𝑐𝑚𝑚𝑒𝑒𝑜𝑜. = ℓ ∙√33
A maximální průhyb od příčného zatížení v tomto místě bude:
𝑣𝑣𝑝𝑝ř. max = 𝑣𝑣(𝑚𝑚𝑐𝑐𝑚𝑚𝑒𝑒𝑜𝑜.) =𝑀𝑀
6 ∙ 𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧∙
⎣⎢⎢⎢⎡
ℓ ∙√33
∙ ℓ −�ℓ ∙ √3
3 �3
ℓ
⎦⎥⎥⎥⎤
=√318
∙𝑀𝑀 ∙ ℓ2
𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧
V místě xextr. nyní určíme také velikost M (xextr.):
(𝑚𝑚𝑐𝑐𝑚𝑚𝑒𝑒𝑜𝑜.) =𝑀𝑀ℓ
∙ ℓ ∙√33
= 𝑀𝑀 ∙√33
.
Přibližný maximální moment Mmax určíme jako:
𝑀𝑀max = (𝑚𝑚𝑐𝑐𝑚𝑚𝑒𝑒𝑜𝑜.) + 𝑁𝑁 ∙ 𝑣𝑣𝑝𝑝ř. max = 𝑀𝑀 ∙√33
+ 𝑁𝑁 ∙√318
∙𝑀𝑀 ∙ ℓ2
𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧= 𝑀𝑀 ∙
√33
∙ �1 +𝑁𝑁 ∙ ℓ2
6 ∙ 𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧�
Při zavedení kritické Eulerovy síly pro II. případ vzpěru a Eulerovy bezpečnosti:
𝐹𝐹𝑐𝑐𝑜𝑜.𝜀𝜀 II =
𝜋𝜋2 ∙ 𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧
ℓ2 ⟹ 𝑘𝑘𝜀𝜀 =𝐹𝐹𝑐𝑐𝑜𝑜.
𝜀𝜀 II
𝑁𝑁
bude:
𝑀𝑀max = 𝑀𝑀 ∙√33
∙ �1 +𝜋𝜋2 ∙ 𝑁𝑁 ∙ ℓ2
𝜋𝜋2 ∙ 6 ∙ 𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧� = 𝑀𝑀 ∙
√33
∙ �1 +𝜋𝜋2
6∙
1𝑘𝑘𝜀𝜀
� ≈ 𝑀𝑀 ∙√33
∙ �1 + 1,645 ∙1𝑘𝑘𝜀𝜀
� .
Tedy například pro 𝑘𝑘𝜀𝜀 = 10 bude přibližná hodnota maximálního ohybového momentu:
𝑀𝑀max = 1,1645 ∙ 𝑀𝑀 ∙√33
.
Tuto hodnotu bychom nyní dosadili do pevnostní podmínky pro kombinaci tlaku s ohybem:
𝜎𝜎𝑜𝑜𝑐𝑐𝑑𝑑 =𝑀𝑀max
𝑊𝑊𝑑𝑑+ �−
𝑁𝑁𝐴𝐴
� ≤ 𝜎𝜎𝐷𝐷 .
M
N
Mm
ax
xextr.
M (xextr.)
vpř.max
M
M
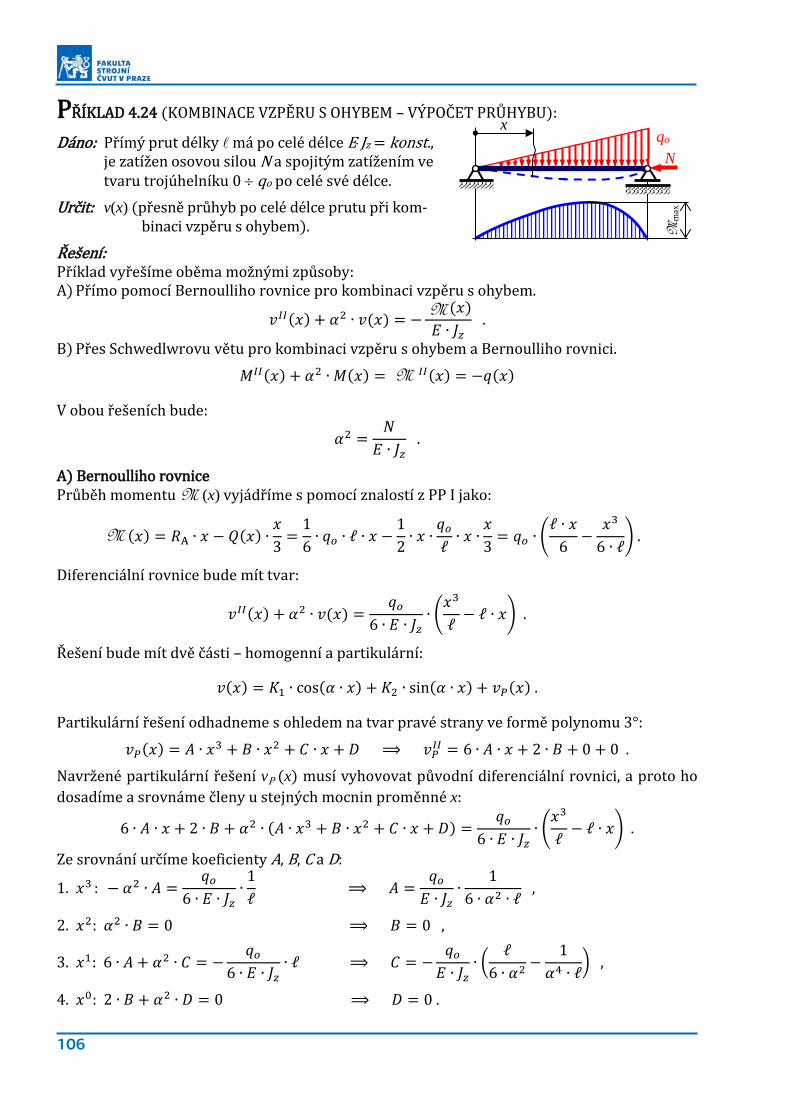
106
PŘÍKLAD 4.24 (KOMBINACE VZPĚRU S OHYBEM – VÝPOČET PRŮHYBU):
Dáno: Přímý prut délky má po celé délce E⋅Jz = konst., je zatížen osovou silou N a spojitým zatížením ve tvaru trojúhelníku 0 ÷ qo po celé své délce.
Určit: v(x) (přesně průhyb po celé délce prutu při kom- binaci vzpěru s ohybem).
Řešení: Příklad vyřešíme oběma možnými způsoby: A) Přímo pomocí Bernoulliho rovnice pro kombinaci vzpěru s ohybem.
𝑣𝑣𝐼𝐼𝐼𝐼(𝑚𝑚) + 𝛼𝛼2 ∙ 𝑣𝑣(𝑚𝑚) = − (𝑚𝑚)𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧
.
B) Přes Schwedlwrovu větu pro kombinaci vzpěru s ohybem a Bernoulliho rovnici.
𝑀𝑀𝐼𝐼𝐼𝐼(𝑚𝑚) + 𝛼𝛼2 ∙ 𝑀𝑀(𝑚𝑚) = 𝐼𝐼𝐼𝐼(𝑚𝑚) = −𝑞𝑞(𝑚𝑚)
V obou řešeních bude:
𝛼𝛼2 =𝑁𝑁
𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧 .
A) Bernoulliho rovnice Průběh momentu M (x) vyjádříme s pomocí znalostí z PP I jako:
(𝑚𝑚) = 𝑅𝑅A ∙ 𝑚𝑚 − 𝑄𝑄(𝑚𝑚) ∙𝑚𝑚3
=16
∙ 𝑞𝑞𝑑𝑑 ∙ ℓ ∙ 𝑚𝑚 −12
∙ 𝑚𝑚 ∙𝑞𝑞𝑑𝑑
ℓ∙ 𝑚𝑚 ∙
𝑚𝑚3
= 𝑞𝑞𝑑𝑑 ∙ �ℓ ∙ 𝑚𝑚
6−
𝑚𝑚3
6 ∙ ℓ� .
Diferenciální rovnice bude mít tvar:
𝑣𝑣𝐼𝐼𝐼𝐼(𝑚𝑚) + 𝛼𝛼2 ∙ 𝑣𝑣(𝑚𝑚) =𝑞𝑞𝑑𝑑
6 ∙ 𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧∙ �
𝑚𝑚3
ℓ− ℓ ∙ 𝑚𝑚� .
Řešení bude mít dvě části – homogenní a partikulární:
𝑣𝑣(𝑚𝑚) = 𝐾𝐾1 ∙ cos(𝛼𝛼 ∙ 𝑚𝑚) + 𝐾𝐾2 ∙ sin(𝛼𝛼 ∙ 𝑚𝑚) + 𝑣𝑣𝑃𝑃(𝑚𝑚) .
Partikulární řešení odhadneme s ohledem na tvar pravé strany ve formě polynomu 3°:
𝑣𝑣𝑃𝑃(𝑚𝑚) = 𝐴𝐴 ∙ 𝑚𝑚3 + 𝐵𝐵 ∙ 𝑚𝑚2 + 𝐶𝐶 ∙ 𝑚𝑚 + 𝐷𝐷 ⟹ 𝑣𝑣𝑃𝑃𝐼𝐼𝐼𝐼 = 6 ∙ 𝐴𝐴 ∙ 𝑚𝑚 + 2 ∙ 𝐵𝐵 + 0 + 0 .
Navržené partikulární řešení vP (x) musí vyhovovat původní diferenciální rovnici, a proto ho dosadíme a srovnáme členy u stejných mocnin proměnné x:
6 ∙ 𝐴𝐴 ∙ 𝑚𝑚 + 2 ∙ 𝐵𝐵 + 𝛼𝛼2 ∙ (𝐴𝐴 ∙ 𝑚𝑚3 + 𝐵𝐵 ∙ 𝑚𝑚2 + 𝐶𝐶 ∙ 𝑚𝑚 + 𝐷𝐷) =𝑞𝑞𝑑𝑑
6 ∙ 𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧∙ �
𝑚𝑚3
ℓ− ℓ ∙ 𝑚𝑚� .
Ze srovnání určíme koeficienty A, B, C a D:
1. 𝑚𝑚3 : − 𝛼𝛼2 ∙ 𝐴𝐴 =𝑞𝑞𝑑𝑑
6 ∙ 𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧∙
1ℓ
⟹ 𝐴𝐴 =𝑞𝑞𝑑𝑑
𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧∙
16 ∙ 𝛼𝛼2 ∙ ℓ
,
2. 𝑚𝑚2: 𝛼𝛼2 ∙ 𝐵𝐵 = 0 ⟹ 𝐵𝐵 = 0 ,
3. 𝑚𝑚1: 6 ∙ 𝐴𝐴 + 𝛼𝛼2 ∙ 𝐶𝐶 = −𝑞𝑞𝑑𝑑
6 ∙ 𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧∙ ℓ ⟹ 𝐶𝐶 = −
𝑞𝑞𝑑𝑑
𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧∙ �
ℓ6 ∙ 𝛼𝛼2 −
1𝛼𝛼4 ∙ ℓ
� ,
4. 𝑚𝑚0: 2 ∙ 𝐵𝐵 + 𝛼𝛼2 ∙ 𝐷𝐷 = 0 ⟹ 𝐷𝐷 = 0 .
N qo
Mm
ax
x
M
M
M

Pružnost a pevnost II ZS 2018/2019
107
Partikulární řešení tedy bude:
𝑣𝑣𝑃𝑃(𝑚𝑚) =𝑞𝑞𝑑𝑑
𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧∙
16 ∙ 𝛼𝛼2 ∙ ℓ
∙ 𝑚𝑚3 −𝑞𝑞𝑑𝑑
𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧∙ �
ℓ6 ∙ 𝛼𝛼2 −
1𝛼𝛼4 ∙ ℓ
� ∙ 𝑚𝑚 =𝑞𝑞𝑑𝑑
𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧∙ �
𝑚𝑚3
6 ∙ 𝛼𝛼2 ∙ ℓ−
ℓ ∙ 𝑚𝑚6 ∙ 𝛼𝛼2 −
𝑚𝑚𝛼𝛼4 ∙ ℓ
� .
Výsledné řešení diferenciální rovnice v průhybech bude:
𝑣𝑣(𝑚𝑚) = 𝐾𝐾1 ∙ cos(𝛼𝛼 ∙ 𝑚𝑚) + 𝐾𝐾2 ∙ sin(𝛼𝛼 ∙ 𝑚𝑚) +𝑞𝑞𝑑𝑑
𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧∙ �
𝑚𝑚3
6 ∙ 𝛼𝛼2 ∙ ℓ−
ℓ ∙ 𝑚𝑚6 ∙ 𝛼𝛼2 −
𝑚𝑚𝛼𝛼4 ∙ ℓ
� .
Integrační konstanty K1 a K2 určíme y okrajových podmínek:
1. 𝑚𝑚 = 0: 𝑣𝑣(0) = 0 ⟹ 𝐾𝐾1 ∙ 1 + 𝐾𝐾2 ∙ 0 + 0 = 0 ⟹ 𝐾𝐾1 = 0 ,
2. 𝑚𝑚 = ℓ: 𝑣𝑣(ℓ) = 0 ⟹ 0 + 𝐾𝐾2 ∙ sin(𝛼𝛼 ∙ ℓ) +𝑞𝑞𝑑𝑑
𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧∙ �−
1𝛼𝛼4� ⟹ 𝐾𝐾2 =
1sin(𝛼𝛼 ∙ ℓ) ∙
𝑞𝑞𝑑𝑑
𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧∙
1𝛼𝛼4 .
Hledaná rovnice průhybové čáry při zadané kombinaci vzpěru s ohybem bude mít tvar:
𝑣𝑣(𝑚𝑚) =𝑞𝑞𝑑𝑑
𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧∙ �
1𝛼𝛼4 ∙
sin(𝛼𝛼 ∙ 𝑚𝑚)sin(𝛼𝛼 ∙ ℓ) +
𝑚𝑚3
6 ∙ 𝛼𝛼2 ∙ ℓ−
ℓ ∙ 𝑚𝑚6 ∙ 𝛼𝛼2 −
𝑚𝑚𝛼𝛼4 ∙ ℓ
� .
Pokud bychom chtěli najít extrém, museli bychom nejprve pomocí derivace funkce v(x) najít jeho polohu vextr. a pak spočítat v tomto bodě funkční hodnotu 𝑣𝑣(𝑚𝑚𝑐𝑐𝑚𝑚𝑒𝑒𝑜𝑜.):
𝑑𝑑𝑣𝑣(𝑚𝑚)𝑑𝑑𝑚𝑚
= 0 ⟹ 𝑞𝑞𝑑𝑑
𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧∙ �
𝛼𝛼𝛼𝛼4 ∙
cos(𝛼𝛼 ∙ 𝑚𝑚)sin(𝛼𝛼 ∙ ℓ) +
𝑚𝑚2
2 ∙ 𝛼𝛼2 ∙ ℓ−
ℓ6 ∙ 𝛼𝛼2 −
1𝛼𝛼4 ∙ ℓ
� = 0 ⟹ 𝑚𝑚𝑐𝑐𝑚𝑚𝑒𝑒𝑜𝑜.
𝑣𝑣max = 𝑣𝑣(𝑚𝑚𝑐𝑐𝑚𝑚𝑒𝑒𝑜𝑜.) =𝑞𝑞𝑑𝑑
𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧∙ �
1𝛼𝛼4 ∙
sin(𝛼𝛼 ∙ 𝑚𝑚𝑐𝑐𝑚𝑚𝑒𝑒𝑜𝑜.)sin(𝛼𝛼 ∙ ℓ) +
𝑚𝑚𝑐𝑐𝑚𝑚𝑒𝑒𝑜𝑜.3
6 ∙ 𝛼𝛼2 ∙ ℓ−
ℓ ∙ 𝑚𝑚𝑐𝑐𝑚𝑚𝑒𝑒𝑜𝑜.
6 ∙ 𝛼𝛼2 −𝑚𝑚𝑐𝑐𝑚𝑚𝑒𝑒𝑜𝑜.
𝛼𝛼4 ∙ ℓ� .
B) Schwedlerova věta Průběh spojitého zatížení q(x) vyjádříme s pomocí znalostí z PP I jako:
𝑞𝑞(𝑚𝑚) =𝑞𝑞𝑑𝑑
ℓ∙ 𝑚𝑚 .
Diferenciální rovnice pak bude mít tvar:
𝑀𝑀𝐼𝐼𝐼𝐼(𝑚𝑚) + 𝛼𝛼2 ∙ 𝑀𝑀(𝑚𝑚) = −𝑞𝑞𝑑𝑑
ℓ∙ 𝑚𝑚 .
Řešení bude mít vzhledem k nenulové pravé straně také partikulární řešení, které odhadneme s ohledem na tvar pravé strany ve formě polynomu 1°:
𝑀𝑀𝑃𝑃(𝑚𝑚) = 𝐴𝐴 ∙ 𝑚𝑚 + 𝐵𝐵 ⟹ 𝑀𝑀𝑃𝑃𝐼𝐼𝐼𝐼 = 0 .
Navržené partikulární řešení musí vyhovovat původní diferenciální rovnici, a proto ho dosadíme a srovnáme členy u stejných mocnin proměnné x:
0 + 𝛼𝛼2 ∙ (𝐴𝐴 ∙ 𝑚𝑚 + 𝐵𝐵) = −𝑞𝑞𝑑𝑑
ℓ∙ 𝑚𝑚 .
Ze srovnání určíme koeficienty A, B, C a D:
1. 𝑚𝑚1: 𝛼𝛼2 ∙ 𝐴𝐴 = −𝑞𝑞𝑑𝑑
ℓ ⟹ 𝐴𝐴 = −
𝑞𝑞𝑑𝑑
𝛼𝛼2 ∙ ℓ ,
2. 𝑚𝑚0: 𝛼𝛼2 ∙ 𝐵𝐵 = 0 ⟹ 𝐵𝐵 = 0 ,

108
Partikulární řešení a následně celkové řešení tedy bude:
𝑀𝑀𝑃𝑃(𝑚𝑚) = −𝑞𝑞𝑑𝑑
𝛼𝛼2 ∙ ℓ∙ 𝑚𝑚 ⟹ 𝑀𝑀(𝑚𝑚) = 𝐾𝐾1 ∙ cos(𝛼𝛼 ∙ 𝑚𝑚) + 𝐾𝐾2 ∙ sin(𝛼𝛼 ∙ 𝑚𝑚) −
𝑞𝑞𝑑𝑑
𝛼𝛼2 ∙ ℓ∙ 𝑚𝑚 .
Integrační konstanty K1 a K2 určíme y okrajových podmínek:
1. 𝑚𝑚 = 0: 𝑀𝑀(0) = 0 ⟹ 𝐾𝐾1 ∙ 1 + 𝐾𝐾2 ∙ 0 + 0 = 0 ⟹ 𝐾𝐾1 = 0 ,
2. 𝑚𝑚 = ℓ: 𝑀𝑀(ℓ) = 0 ⟹ 0 + 𝐾𝐾2 ∙ sin(𝛼𝛼 ∙ ℓ) −𝑞𝑞𝑑𝑑
𝛼𝛼2 ⟹ 𝐾𝐾2 =1
sin(𝛼𝛼 ∙ ℓ) ∙𝑞𝑞𝑑𝑑
𝛼𝛼2 .
Hledaný průběh momentu M(x) bude:
𝑀𝑀(𝑚𝑚) =𝑞𝑞𝑑𝑑
𝛼𝛼2 ∙ �sin(𝛼𝛼 ∙ 𝑚𝑚)sin(𝛼𝛼 ∙ ℓ) −
𝑚𝑚ℓ
� .
Nyní dosadíme tento získaný průběh do Bernoulliho diferenciální rovnici průhybové čáry, kterou budeme následně 2× integrovat s připojením neznámých integračních konstant:
𝑣𝑣𝐼𝐼𝐼𝐼(𝑚𝑚) = −𝑀𝑀(𝑚𝑚)𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧
⟹ 𝑣𝑣𝐼𝐼𝐼𝐼(𝑚𝑚) = −𝑞𝑞𝑑𝑑
𝛼𝛼2 ∙ 𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧∙ �
sin(𝛼𝛼 ∙ 𝑚𝑚)sin(𝛼𝛼 ∙ ℓ) −
𝑚𝑚ℓ
� ,
𝑣𝑣𝐼𝐼(𝑚𝑚) = −𝑞𝑞𝑑𝑑
𝛼𝛼2 ∙ 𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧∙ �−
cos(𝛼𝛼 ∙ 𝑚𝑚)𝛼𝛼 ∙ sin(𝛼𝛼 ∙ ℓ) −
𝑚𝑚2
2 ∙ ℓ� + 𝐶𝐶1 ,
𝑣𝑣(𝑚𝑚) = −𝑞𝑞𝑑𝑑
𝛼𝛼2 ∙ 𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧∙ �−
sin(𝛼𝛼 ∙ 𝑚𝑚)𝛼𝛼2 ∙ sin(𝛼𝛼 ∙ ℓ) −
𝑚𝑚3
6 ∙ ℓ� + 𝐶𝐶1 ∙ 𝑚𝑚 + 𝐶𝐶2 .
Integrační konstanty C1 a C2 určíme z okrajových podmínek pro krajní podpěry prutu:
1. 𝑚𝑚 = 0: 𝑣𝑣(0) = 0 ⟹ 𝐶𝐶2 = 0 ,
2. 𝑚𝑚 = ℓ: 𝑣𝑣(ℓ) = 0 ⟹ 𝐶𝐶1 = −𝑞𝑞𝑑𝑑
𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧∙ �
1𝛼𝛼4 ∙ ℓ
+ℓ
6𝛼𝛼2� .
Výsledná rovnice průhybové čáry při zadané kombinaci vzpěru s ohybem bude:
𝑣𝑣(𝑚𝑚) =𝑞𝑞𝑑𝑑
𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧∙ �
1𝛼𝛼4 ∙
sin(𝛼𝛼 ∙ 𝑚𝑚)sin(𝛼𝛼 ∙ ℓ) +
𝑚𝑚3
6 ∙ 𝛼𝛼2 ∙ ℓ−
ℓ ∙ 𝑚𝑚6 ∙ 𝛼𝛼2 −
𝑚𝑚𝛼𝛼4 ∙ ℓ
� .
Poznámka: Je patrné, že výsledek řešení pomocí Schwedlerovy věty pro kombinaci vzpěru s ohybem je shodný s řešením pomocí Bernoulliho diferenciální rovnice pro kombinaci vzpěru s ohybem, což je pochopitelné.
Pokud bychom chtěli najít extrém, museli bychom nejprve pomocí derivace funkce v(x) najít jeho polohu vextr. a pak spočítat v tomto bodě funkční hodnotu 𝑣𝑣(𝑚𝑚𝑐𝑐𝑚𝑚𝑒𝑒𝑜𝑜.):
𝑑𝑑𝑣𝑣(𝑚𝑚)𝑑𝑑𝑚𝑚
= 0 ⟹ 𝑞𝑞𝑑𝑑
𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧∙ �
𝛼𝛼𝛼𝛼4 ∙
cos(𝛼𝛼 ∙ 𝑚𝑚)sin(𝛼𝛼 ∙ ℓ) +
𝑚𝑚2
2 ∙ 𝛼𝛼2 ∙ ℓ−
ℓ6 ∙ 𝛼𝛼2 −
1𝛼𝛼4 ∙ ℓ
� = 0 ⟹ 𝑚𝑚𝑐𝑐𝑚𝑚𝑒𝑒𝑜𝑜.
𝑣𝑣max = 𝑣𝑣(𝑚𝑚𝑐𝑐𝑚𝑚𝑒𝑒𝑜𝑜.) =𝑞𝑞𝑑𝑑
𝐸𝐸 ∙ 𝐽𝐽𝑧𝑧∙ �
1𝛼𝛼4 ∙
sin(𝛼𝛼 ∙ 𝑚𝑚𝑐𝑐𝑚𝑚𝑒𝑒𝑜𝑜.)sin(𝛼𝛼 ∙ ℓ) +
𝑚𝑚𝑐𝑐𝑚𝑚𝑒𝑒𝑜𝑜.3
6 ∙ 𝛼𝛼2 ∙ ℓ−
ℓ ∙ 𝑚𝑚𝑐𝑐𝑚𝑚𝑒𝑒𝑜𝑜.
6 ∙ 𝛼𝛼2 −𝑚𝑚𝑐𝑐𝑚𝑚𝑒𝑒𝑜𝑜.
𝛼𝛼4 ∙ ℓ� .

Pružnost a pevnost II ZS 2018/2019
109
5. MATEMATICKÁ TEORIE PRUŽNOSTI PŘÍKLAD 5.1 (ROVNICE MATEMATICKÉ TEORIE PRUŽNOSTI):
Dáno: Váleček délky a plochy průřezu A je vyroben z oceli, nachází se v gravitačním poli a je na svém konci zatížen osamělou silou F.
Určit: σ(x), ε(x), u(x) a ∆ (vše pomocí rovnic matematické teorie pružnosti).
Řešení: V tomto prutu bude vznikat pouze jednoosá napjatost.
Rovnici rovnováhy můžeme použít jen jednu do směru osy x, parciální derivace můžeme nahradit obyčejnými derivacemi a za objemovou sílu dosadíme 𝑋𝑋 = 𝜌𝜌 ∙ 𝑔𝑔:
𝜕𝜕𝜎𝜎𝑚𝑚
𝜕𝜕𝑚𝑚+
𝜕𝜕𝜏𝜏𝑧𝑧
𝜕𝜕𝑦𝑦+
𝜕𝜕𝜎𝜎𝑦𝑦
𝜕𝜕𝜕𝜕+ 𝑋𝑋 = 0 ⟹
𝑑𝑑𝜎𝜎𝑚𝑚
𝑑𝑑𝑚𝑚+ 𝜌𝜌 ∙ 𝑔𝑔 = 0 .
Separujeme proměnné a integrujeme levou a pravou stranu s připojením integrační konstanty:
𝑑𝑑𝜎𝜎𝑚𝑚 = −𝜌𝜌 ∙ 𝑔𝑔 ∙ 𝑑𝑑𝑚𝑚 ⟹ 𝜎𝜎𝑚𝑚(𝑚𝑚) = −𝜌𝜌 ∙ 𝑔𝑔 ∙ 𝑚𝑚 + 𝐾𝐾1 .
Pro určení konstanty K1 musíme sestavit vhodnou okrajovou podmínku:
pro 𝑚𝑚 = ℓ musí platit 𝜎𝜎𝑚𝑚(ℓ) = +𝐹𝐹𝐴𝐴
⟹ +𝐹𝐹𝐴𝐴
= −𝜌𝜌 ∙ 𝑔𝑔 ∙ ℓ + 𝐾𝐾1 ⟹ 𝐾𝐾1 =𝐹𝐹𝐴𝐴
+ 𝜌𝜌 ∙ 𝑔𝑔 ∙ ℓ .
Hledaný průběh napětí tedy bude:
𝜎𝜎𝑚𝑚(𝑚𝑚) = −𝜌𝜌 ∙ 𝑔𝑔 ∙ 𝑚𝑚 + �𝐹𝐹𝐴𝐴
+ 𝜌𝜌 ∙ 𝑔𝑔 ∙ ℓ� =𝐹𝐹𝐴𝐴
+ 𝜌𝜌 ∙ 𝑔𝑔 ∙ (ℓ − 𝑚𝑚) ⟹ 𝜎𝜎max = 𝜎𝜎𝑚𝑚(0) =𝐹𝐹𝐴𝐴
+ 𝜌𝜌 ∙ 𝑔𝑔 ∙ ℓ .
Pro stanovení deformace použijeme rozšířený Hookův zákon:
𝜀𝜀𝑚𝑚(𝑚𝑚) =1𝐸𝐸
∙ �𝜎𝜎𝑚𝑚 − 𝑣𝑣 ∙ �𝜎𝜎𝑦𝑦 + 𝜎𝜎𝑧𝑧�� =1𝐸𝐸
∙ �𝐹𝐹𝐴𝐴
+ 𝜌𝜌 ∙ 𝑔𝑔 ∙ (ℓ − 𝑚𝑚)� =𝐹𝐹
𝐸𝐸 ∙ 𝐴𝐴+
𝜌𝜌 ∙ 𝑔𝑔𝐸𝐸
∙ (ℓ − 𝑚𝑚) .
Posuv u(x) určíme z deformační rovnice, kde opět nahradíme parciální derivace obyčejnou: 𝜕𝜕𝑢𝑢𝜕𝜕𝑚𝑚
= 𝜀𝜀𝑚𝑚 ⟹ 𝑑𝑑𝑢𝑢𝑑𝑑𝑚𝑚
=𝐹𝐹
𝐸𝐸 ∙ 𝐴𝐴+
𝜌𝜌 ∙ 𝑔𝑔𝐸𝐸
∙ (ℓ − 𝑚𝑚) .
Separujeme proměnné a integrujeme levou a pravou stranu s připojením integrační konstanty:
𝑑𝑑𝑢𝑢(𝑚𝑚) = �𝐹𝐹
𝐸𝐸 ∙ 𝐴𝐴+
𝜌𝜌 ∙ 𝑔𝑔𝐸𝐸
∙ (ℓ − 𝑚𝑚) � ∙ 𝑑𝑑𝑚𝑚 ⟹ 𝑢𝑢(𝑚𝑚) = 𝐹𝐹 ∙ 𝑚𝑚𝐸𝐸 ∙ 𝐴𝐴
+𝜌𝜌 ∙ 𝑔𝑔
𝐸𝐸∙ �ℓ ∙ 𝑚𝑚 −
𝑚𝑚2
2� + 𝐾𝐾2 .
Pro určení konstanty K1 musíme sestavit vhodnou okrajovou podmínku: pro 𝑚𝑚 = 0 musí platit 𝑢𝑢(0) = 0 ⟹ +𝐾𝐾1 = 0 . Hledaný průběh posunutí tedy bude:
𝑢𝑢(𝑚𝑚) = 𝐹𝐹 ∙ 𝑚𝑚𝐸𝐸 ∙ 𝐴𝐴
+𝜌𝜌 ∙ 𝑔𝑔
𝐸𝐸∙ (ℓ ∙ 𝑚𝑚 − 𝑚𝑚2) .
Celkové prodloužení prutu určíme jako:
∆ℓ = 𝑢𝑢(ℓ) =𝐹𝐹 ∙ ℓ𝐸𝐸 ∙ 𝐴𝐴
+𝜌𝜌 ∙ 𝑔𝑔 ∙ ℓ2
2 ∙ 𝐸𝐸 .
A
x
F

110
PŘÍKLAD 5.2 (PROSTOROVÁ NAPJATOST – HLAVNÍ NAPĚTÍ A HLAVNÍ ROVINY):
Dáno: σx = 60 N⋅mm-2, σy = −50 N⋅mm-2, σz = 20 N⋅mm-2, τx = 40 N⋅mm-2, τy= 0 N⋅mm-2 a τz = −30 N⋅mm-2.
Určit: σ1,2,3 (hlavní napětí této napjatosti), cos α1,2,3 ; cos β1,2,3 a cos γ1,2,3 (směrové cosiny normál hlavních rovin).
Řešení: Nejprve sestavíme tenzor napětí pro zadanou napjatost:
−−−
=
=2040040503003060
zxy
xyz
yzx
Tστττστττσ
σ
Řešení hlavních napětí provedeme pomocí kubické rovnice:
0322
13 =−⋅+⋅− III σσσ .
Pro dosazení do kubické rovnice musíme vypočítat jednotlivé invarianty tenzoru napětí: 2
1 mmN30205060 −⋅=+−=++= zyxI σσσ
( )22
2
mmN3005120065002001600100019000003
600020
20404050
50303060
−⋅−=+−=+−−−−=
=+−+−−−=++=
xy
yz
zx
xy
yz
zxI σττσ
σττσ
σττσ
( )323 mmN000174000960001800060
2040040503003060
−⋅−=−−−=−−−
==
zxy
xyz
yzx
Iστττστττσ
Tyto hodnoty invariant dosadíme do základní kubické rovnice platné pro napjatost:
0)000174()3005(30 23 =−−⋅−+⋅− σσσ .
Kořeny této základní kubické rovnice lze určit různými způsoby, a to ať již metodami známými z matematiky nebo pomocí výpočetní techniky. Po výpočtu je:
21 mmN19,70 −⋅=σ ; 2
2 mmN60,33 −⋅=σ a 21 mmN79,73 −⋅−=σ
Poznámka: Pro kontrolu vypočteme invarianty i pomocí hlavních napětí. Invarianty jsou vlastnostmi tenzoru napětí a transformací se nezmění – jsou neměnné = invariantní):
23211 mmN3079,7360,3319,70 −⋅=−+=++= σσσI
( ) 0,007%chyba−⋅−≈−=−−=
=−+−+=++=
− 22
1
3
3
2
2
12
mmN300538,300532,179544,479238,3582
19,700079,73
79,730060,33
60,330019,70
00
00
00
σσ
σσ
σσI
( )32
3
2
1
3 mmN00017402514779,7300
060,3300019,70
000000
−⋅−≈−=−
==σ
σσ
I − chyba 0,01%.
Z výsledků je patrná velmi dobrá shoda (nepřesnosti jsou způsobeny jen zaokrouhlováním).
σx
σy
σz
τz
τx
τx τz
Pružnost a pevnost II ZS 2018/2019
111
Pro výpočet hlavních rovin musíme postupně dosadit jednotlivé kořeny – hlavní napětí – do soustavy základních rovnic prostorové napjatosti:
( )( )
( ) 0coscoscos0coscoscos0coscoscos
1111
1111
1111
=⋅−+⋅+⋅
=⋅+⋅−+⋅
=⋅+⋅+⋅−
γσσβτατ
γτβσσατ
γτβτασσ
zxy
xyz
yzx
Pro σ1 = 70,19 N⋅mm-2:
0cos19,50cos40cos0)30cos40cos9,120cos30)20cos0cos30cos19,10)1
111
111
111
=⋅−⋅+⋅=⋅+⋅−⋅−=⋅+⋅−⋅−
γβαγβαγβα
Protože soustava je po dosazení hlavního napětí lineárně závislá, použijeme jen dvě rovnice a jako třetí doplníme rovnici analytické geometrie.
1coscoscos 12
12
12 =++ γβα
Je výhodné použít 1. a 3. rovnici, které obsahují jen dvě ze tří neznámých:
1111
1111
cos19,50
40cos0cos19,50cos40)2
cos19,10
30cos0cos30cos19,10)1
βγγβ
βαβα
⋅+=⇒=⋅−⋅
⋅−=⇒=⋅−⋅−
Tyto vztahy dosadíme do geometrické rovnice: 119,50
40119,10
30cos22
12 =
++
−⋅β
Odtud dostáváme řešení všech tří směrových cosinů 1. hlavní roviny:
91722,0cos 1 =α ; 31155,0cos 1 ±=β ; 24830,0cos 1 ±=γ .
Pro σ2 = 33,60 N⋅mm-2 bychom provedli obdobný postup: vybereme dvě ze tří rovnic a doplní-me rovnici analytické geometrie a dostáváme:
36541,0cos 2 =α ; 0,29964cos 2 ±=β ; 88129,0cos 2 ±=γ
Pro σ3 = −73,79 N⋅mm-2 bychom provedli obdobný postup: vybereme dvě ze tří rovnic a dopl-níme rovnici analytické geometrie a dostáváme:
86772,0cos 3 =α ; 0,39886cos 3 ±=β ; 29661,0cos 3 ±=γ
Hlavní napětí σi Hlavní roviny HRi (i = 1; 2; 3)
[N⋅mm-2] [1]
+70,19 91722,0cos 1 =α 31155,0cos 1 ±=β 24830,0cos 1 ±=γ
+33,60 36541,0cos 1 =α 0,29964cos 1 ±=β 88129,0cos 1 ±=γ
−73,19 86772,0cos 1 =α 0,39886cos 1 ±=β 29661,0cos 1 ±=γ

112
PŘÍKLAD 5.3 (PROSTOROVÁ NAPJATOST – HLAVNÍ NAPĚTÍ A HLAVNÍ ROVINY):
Dáno: σx = 50 N⋅mm−2, σy = −20 N⋅mm−2, σz = 80 N⋅mm−2, τx = −10 N⋅mm−2, τy = 30 N⋅mm−2 a τz = 40 N⋅mm−2.
Určit: Velikosti hlavních napětí σ1 >σ2 > σ3 a hlavní rovinu HR1 odpo- vídající maximálnímu hlavnímu napětí σ1.
Řešení: V tomto případě bude mít tenzor napětí tvar:
+−+−−++++
=
=801030102040304050
zxy
xyz
yzx
στττστττσ
σT .
Základem řešení hlavních napětí je kubická rovnice sestavená na základě předpokladu lineární závislosti původního systému:
+𝜎𝜎3 − 𝐼𝐼1 ∙ 𝜎𝜎2 + 𝐼𝐼2 ∙ 𝜎𝜎 − 𝐼𝐼3 = 0 .
Nejprve vypočítáme jednotlivé invarianty 𝐼𝐼1÷3 tenzoru napětí: 2
1 mmN11080)20(50 −⋅=+−+=++= zyxI σσσ ,
( )22
2
mmN2001)9401161610(100
50303080
80101020
20404050
−⋅−=−+−−−−⋅=
=++++
++−−−
+−+++
=++=xy
yz
zx
xy
yz
zxI σττσ
σττσ
σττσ
,
[ ] ( )32
3
mmN000219)512818(1212801000
801030102040304050
−⋅−=++−−−−−⋅=
=+−+−−++++
==
zxy
xyz
yzx
Iστττστττσ
.
Tyto hodnoty dosadíme do základní kubické rovnice: 00002192001110 23 =+⋅−⋅− σσσ .
Jejím řešením získáme TŘI REÁLNÉ kořeny, které jsou hledanými hlavními napětími σ1, σ2 a σ3: σ1 = 100,15 N⋅mm-2 , σ2 = 51,95 N⋅mm-2 a σ3 = −42,10 N⋅mm-2 .
Poznámka: Správnost výpočtu ověříme výpočtem invariant I1, I2 a I3 z vypočtených hlavních napětí σ1, σ2 a σ3: 𝐼𝐼1 = 𝜎𝜎1 + 𝜎𝜎2 + 𝜎𝜎3 = 100,15 + 51,95 + (−42,10) = 110 N ∙ mm−2, 𝐼𝐼2 = 𝜎𝜎1 ∙ 𝜎𝜎2 + 𝜎𝜎2 ∙ 𝜎𝜎3 + 𝜎𝜎3 ∙ 𝜎𝜎1 = 100,15 ∙ 51,95 + 51,95 ∙ (−42,10) + (−42,10) ∙ 100,15 = 1 200,6 (N ∙ mm−2)2, 𝐼𝐼3 = 𝜎𝜎1 ∙ 𝜎𝜎2 ∙ 𝜎𝜎3 = 100,15 ∙ 51,95 ∙ (−42,10) = −219 037 (N ∙ mm−2)3, Z výsledků je patrné, že se jednotlivé invarianty (neměnné hodnoty) transformací tenzoru napětí nezměnily. Nepatrné rozdíly (0,05% a 0,02%) jsou způsobeny pouze chybou zaokrouhlováním na dvě desetinná místa, protože při použití více desetinných míst by byla chyba „nulová“: 𝐼𝐼2 = 100,14646 ∙ 51,94879 + 51,94879 ∙ (−42,09525) + (−42,09525) ∙ 100,14646 = 1 200,0002 (N ∙ mm−2)2, 𝐼𝐼3 = 100,14646 ∙ 51,94879 ∙ (−42,09525) = −219 000,009 (N ∙ mm−2)3.
σx
σy
σz
τx
τx
τy τy
τz τz
x
y
z
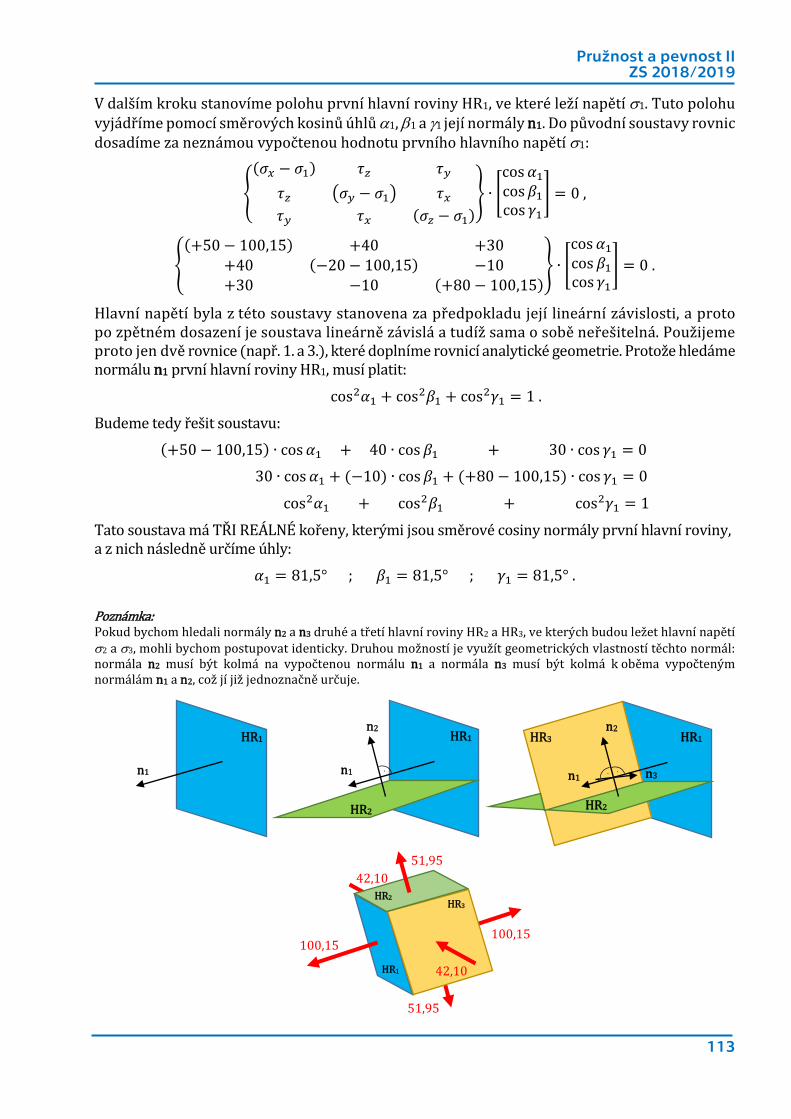
Pružnost a pevnost II ZS 2018/2019
113
V dalším kroku stanovíme polohu první hlavní roviny HR1, ve které leží napětí σ1. Tuto polohu vyjádříme pomocí směrových kosinů úhlů α1, β1 a γ1 její normály n1. Do původní soustavy rovnic dosadíme za neznámou vypočtenou hodnotu prvního hlavního napětí σ1:
�(𝜎𝜎𝑚𝑚 − 𝜎𝜎1) 𝜏𝜏𝑧𝑧 𝜏𝜏𝑦𝑦
𝜏𝜏𝑧𝑧 �𝜎𝜎𝑦𝑦 − 𝜎𝜎1� 𝜏𝜏𝑚𝑚
𝜏𝜏𝑦𝑦 𝜏𝜏𝑚𝑚 (𝜎𝜎𝑧𝑧 − 𝜎𝜎1)� ∙ �
cos 𝛼𝛼1cos 𝛽𝛽1cos 𝛾𝛾1
� = 0 ,
�(+50 − 100,15) +40 +30
+40 (−20 − 100,15) −10+30 −10 (+80 − 100,15)
� ∙ �cos 𝛼𝛼1cos 𝛽𝛽1cos 𝛾𝛾1
� = 0 .
Hlavní napětí byla z této soustavy stanovena za předpokladu její lineární závislosti, a proto po zpětném dosazení je soustava lineárně závislá a tudíž sama o sobě neřešitelná. Použijeme proto jen dvě rovnice (např. 1. a 3.), které doplníme rovnicí analytické geometrie. Protože hledáme normálu n1 první hlavní roviny HR1, musí platit:
cos2𝛼𝛼1 + cos2𝛽𝛽1 + cos2𝛾𝛾1 = 1 .
Budeme tedy řešit soustavu: (+50 − 100,15) ∙ cos 𝛼𝛼1 + 40 ∙ cos 𝛽𝛽1 + 30 ∙ cos 𝛾𝛾1 = 0 30 ∙ cos 𝛼𝛼1 + (−10) ∙ cos 𝛽𝛽1 + (+80 − 100,15) ∙ cos 𝛾𝛾1 = 0
cos2𝛼𝛼1 + cos2𝛽𝛽1 + cos2𝛾𝛾1 = 1
Tato soustava má TŘI REÁLNÉ kořeny, kterými jsou směrové cosiny normály první hlavní roviny, a z nich následně určíme úhly:
𝛼𝛼1 = 81,5° ; 𝛽𝛽1 = 81,5° ; 𝛾𝛾1 = 81,5° .
Poznámka: Pokud bychom hledali normály n2 a n3 druhé a třetí hlavní roviny HR2 a HR3, ve kterých budou ležet hlavní napětí σ2 a σ3, mohli bychom postupovat identicky. Druhou možností je využít geometrických vlastností těchto normál: normála n2 musí být kolmá na vypočtenou normálu n1 a normála n3 musí být kolmá k oběma vypočteným normálám n1 a n2, což jí již jednoznačně určuje.
HR1
n1
n2 HR3
n3
HR2
HR1
n1
HR1
n1
n2
HR2
HR1
HR3 HR2
100,15
51,95
42,10
100,15
51,95
42,10

114
PŘÍKLAD 5.4 (TENZOR NAPĚTÍ A TENZOR PŘETVOŘENÍ):
Dáno: Při tenzometrickém měření byly v určitém místě na povrchu ocelové součásti (E = 2,1·105 N·mm−2 a v = 0,3) stanovené deformace εa = 600 µi, εb = 90 µi a εc = 120 µi.
Určit: Tε (tenzor deformací v daném místě), Tσ (tenzor napětí v daném místě), ε1, 2, 3 (hlavní deformace v daném místě), σ1, 2, 3 (hlavní napětí v daném místě).
Řešení: Deformace se pomocí tenzometrů nejčastěji měří v tzv. mikrojednotkách (µi), což je veličina 106−krát zvětšená oproti skutečným hodnotám, protože 1 µi = 1 µi/m. Souřadnicový systém x−y zvolíme totožný s osami tenzometrů a−b. Z experimentální pružnosti a pevnosti víme, že zkos γz v ose 45° (c) se určí podle vztahu:
𝛾𝛾𝑧𝑧
2=
𝜀𝜀𝑚𝑚 + 𝜀𝜀𝑜𝑜
2− 𝜀𝜀𝑐𝑐 = �
600 + 902
− 120� ∙ 10−6 = 225 ∙ 10−6 .
Protože měření probíhalo na volném povrchu součásti, musela být vznikající napjatost rovinná (σ3 = σz = 0) a musí platit rozšířený Hookův zákon ve tvaru (použijeme dvě rovnice pro normálová napětí a deformace a jednu rovnici pro smykové napětí a zkos):
𝜀𝜀𝑚𝑚 =1𝐸𝐸
∙ �𝜎𝜎𝑚𝑚 − 𝑣𝑣 ∙ (𝜎𝜎𝑦𝑦 + 0)�
𝜀𝜀𝑦𝑦 =1𝐸𝐸
∙ �𝜎𝜎𝑦𝑦 − 𝑣𝑣 ∙ (𝜎𝜎𝑚𝑚 + 0)� ⎭⎪⎬
⎪⎫
⟹
⎩⎪⎨
⎪⎧ 𝜎𝜎𝑚𝑚 =
𝐸𝐸1 − 𝑣𝑣2 ∙ �𝜀𝜀𝑚𝑚 + 𝑣𝑣 ∙ 𝜀𝜀𝑦𝑦�
𝜎𝜎𝑦𝑦 =𝐸𝐸
1 − 𝑣𝑣2 ∙ �𝜀𝜀𝑦𝑦 + 𝑣𝑣 ∙ 𝜀𝜀𝑚𝑚� ,
𝛾𝛾𝑧𝑧 =1𝐺𝐺
∙ 𝜏𝜏𝑧𝑧 ⟹ 𝜏𝜏𝑧𝑧 = 𝐺𝐺 ∙ 𝛾𝛾𝑧𝑧 . Po dosazení naměřených hodnot dostáváme dvě normálová a jedno smykové napětí, která působí v řešeném místě na povrchu součásti:
𝜎𝜎𝑚𝑚 =2,1 ∙ 105
1 − 0,32 ∙ [600 ∙ 10−6 + 0,3 ∙ 90 ∙ 10−6] = 144,7 N ∙ mm−2 ,
𝜎𝜎𝑦𝑦 =2,1 ∙ 105
1 − 0,32 ∙ [90 ∙ 10−6 + 0,3 ∙ 600 ∙ 10−6] = 62,3 N ∙ mm−2 ,
𝜏𝜏𝑧𝑧 = 𝐺𝐺 ∙ 𝛾𝛾𝑧𝑧 =𝐸𝐸
2 ∙ (1 + 𝑣𝑣) ∙ 2 ∙𝛾𝛾𝑧𝑧
2=
2,1 ∙ 105
2 ∙ (1 + 0,3) ∙ 2 ∙ 225 ∙ 10−6 = 36,3 N ∙ mm−2 .
Protože zbývající napětí jsou nulová (σz = 𝜏𝜏x = 𝜏𝜏y = 0), můžeme zapsat tenzor napětí:
𝐓𝐓𝛔𝛔 = �𝜎𝜎𝑚𝑚 𝜏𝜏𝑧𝑧 𝜏𝜏𝑦𝑦𝜏𝜏𝑧𝑧 𝜎𝜎𝑦𝑦 𝜏𝜏𝑚𝑚𝜏𝜏𝑦𝑦 𝜏𝜏𝑚𝑚 𝜎𝜎𝑧𝑧
� = �144,7 36,3 036,3 62,3 0
0 0 0�
Pro zápis tenzoru přetvoření (deformací) musíme ještě z rozšířeného Hookova zákona dopočítat třetí deformaci ve směru kolmém k řešenému povrchu:
𝜀𝜀𝑧𝑧 =1𝐸𝐸
∙ [0 − 𝑣𝑣 ∙ (𝜎𝜎𝑚𝑚 + 𝜎𝜎𝑚𝑚)] =1
2,1 ∙ 105 ∙ [−0,3 ∙ (144,7 + 62,3)] = −296 ∙ 10−6 .
a b
c

Pružnost a pevnost II ZS 2018/2019
115
Tenzor přetvoření (deformací) teď již můžeme zapsat:
𝐓𝐓𝛆𝛆 =
⎩⎪⎨
⎪⎧ 𝜀𝜀𝑚𝑚
𝛾𝛾𝑧𝑧2� 𝛾𝛾𝑦𝑦
2�𝛾𝛾𝑧𝑧
2� 𝜀𝜀𝑦𝑦𝛾𝛾𝑚𝑚
2�𝛾𝛾𝑦𝑦
2� 𝛾𝛾𝑚𝑚2� 𝜀𝜀𝑧𝑧 ⎭
⎪⎬
⎪⎫
= �600 ∙ 10−6 225 ∙ 10−6 0225 ∙ 10−6 90 ∙ 10−6 0
0 0 −296 ∙ 10−6� .
Hlavní deformace ε1,2,3 určíme ze vztahu pro deformace (obdoba Mohrových vztahů pro napětí):
𝜀𝜀1,2 =𝜀𝜀𝑚𝑚 + 𝜀𝜀𝑜𝑜
2± ��
𝜀𝜀𝑚𝑚 − 𝜀𝜀𝑜𝑜
2�
2+ �
𝜀𝜀𝑚𝑚 + 𝜀𝜀𝑜𝑜
2− 𝜀𝜀𝑐𝑐�
2 a 𝜀𝜀3 = 𝜀𝜀𝑧𝑧 .
Po dosazení dostáváme:
𝜀𝜀1,2 = �600 + 90
2± ��
600 − 902
�2
+ �600 + 90
2− 120�
2
� ∙ 10−6 = �685 ∙ 10−6
5 ∙ 10−6
a 𝜀𝜀3 = −296 ∙ 10−6 .
Hlavní napětí σ1,2,3 můžeme nyní určit třemi způsoby:
1. Pomocí invariant tenzoru napětí, které dosadíme do rovnice σ 3 − I1⋅σ 2 + I2⋅σ − I3 = 0:
𝐼𝐼1 = 𝜎𝜎𝑚𝑚 + 𝜎𝜎𝑦𝑦 + 𝜎𝜎𝑧𝑧 = 144,7 + 62,3 + 0 = 207 N ∙ mm−2 ,
𝐼𝐼2 = �𝜎𝜎𝑚𝑚 𝜏𝜏𝑧𝑧𝜏𝜏𝑧𝑧 𝜎𝜎𝑦𝑦
� + �𝜎𝜎𝑦𝑦 𝜏𝜏𝑚𝑚𝜏𝜏𝑚𝑚 𝜎𝜎𝑧𝑧
� + �𝜎𝜎𝑚𝑚 𝜏𝜏𝑦𝑦𝜏𝜏𝑦𝑦 𝜎𝜎𝑧𝑧
� = �144,7 36,336,3 62,3� + �62,3 0
0 0� + �144,7 00 0� = 7 697,12 (N ∙ mm−2)2,
𝐼𝐼3 = �𝜎𝜎𝑚𝑚 𝜏𝜏𝑧𝑧 𝜏𝜏𝑦𝑦𝜏𝜏𝑧𝑧 𝜎𝜎𝑦𝑦 𝜏𝜏𝑚𝑚𝜏𝜏𝑦𝑦 𝜏𝜏𝑚𝑚 𝜎𝜎𝑧𝑧
� = �144,7 36,3 036,3 62,3 0
0 0 0� = 0 (N ∙ mm−2)3.
Odkud po dosazení dostáváme rovnici:
𝜎𝜎3 − 207 ∙ 𝜎𝜎2 + 7 697,12 ∙ 𝜎𝜎 = 0 ⟹ 𝜎𝜎 ∙ �𝜎𝜎2 − 207 ∙ 𝜎𝜎 + 7 697,12� = 0,
a její řešení ve tvaru:
𝜎𝜎1,2 =207 ± �2072 − 4 ∙ 7 697,12
2= �
158,4 N ∙ mm−2
48,6 N ∙ mm−2
a 𝜎𝜎3 = 0 .
2. Pomocí rozšířeného Hookova zákona ze známých hlavních deformací:
𝜎𝜎1 =𝐸𝐸
1 − 𝑣𝑣2 ∙ [𝜀𝜀1 + 𝑣𝑣 ∙ 𝜀𝜀2] =2,1 ∙ 105
1 − 0,32 ∙ [685 ∙ 10−6 + 0,3 ∙ 5 ∙ 10−6] = 158,4 N ∙ mm−2 ,
𝜎𝜎2 =𝐸𝐸
1 − 𝑣𝑣2 ∙ [𝜀𝜀2 + 𝑣𝑣 ∙ 𝜀𝜀1] =2,1 ∙ 105
1 − 0,32 ∙ [ 5 ∙ 10−6 + 0,3 ∙ 685 ∙ 10−6] = 48,6 N ∙ mm−2 .
3. Pomocí vztahů pro rovinnou napjatost (Mohrovy kružnice) pro 𝜎𝜎3 = 0:
𝜎𝜎1,2 =𝜎𝜎𝑚𝑚 + 𝜎𝜎𝑦𝑦
2± ��
𝜎𝜎𝑚𝑚 − 𝜎𝜎𝑦𝑦
2�
2+ 𝜏𝜏𝑧𝑧
2 =144,7 + 62,3
2± ��
144,7 − 62,32
�2
+ 36,32 = � 158,6 N ∙ mm−2
48,4 N ∙ mm−2
.
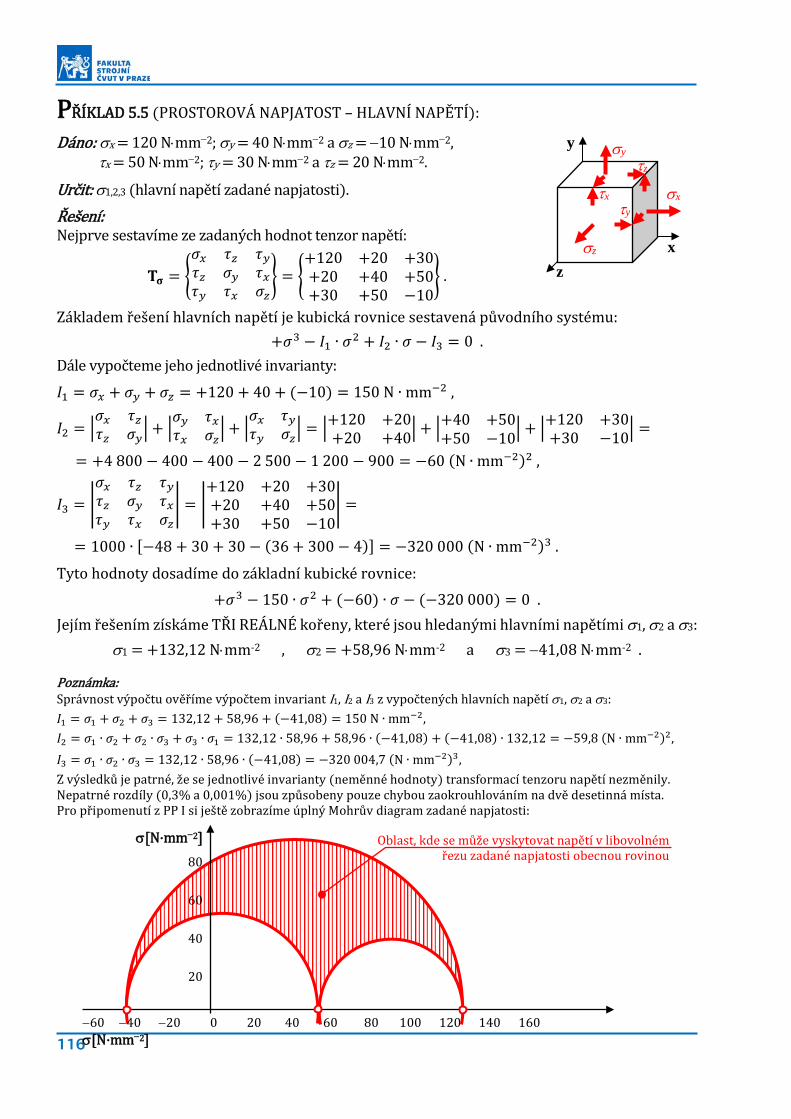
116
PŘÍKLAD 5.5 (PROSTOROVÁ NAPJATOST – HLAVNÍ NAPĚTÍ):
Dáno: σx = 120 N⋅mm−2; σy = 40 N⋅mm−2 a σz = −10 N⋅mm−2, τx = 50 N⋅mm−2; τy = 30 N⋅mm−2 a τz = 20 N⋅mm−2.
Určit: σ1,2,3 (hlavní napětí zadané napjatosti).
Řešení: Nejprve sestavíme ze zadaných hodnot tenzor napětí:
𝐓𝐓𝛔𝛔 = �𝜎𝜎𝑚𝑚 𝜏𝜏𝑧𝑧 𝜏𝜏𝑦𝑦𝜏𝜏𝑧𝑧 𝜎𝜎𝑦𝑦 𝜏𝜏𝑚𝑚𝜏𝜏𝑦𝑦 𝜏𝜏𝑚𝑚 𝜎𝜎𝑧𝑧
� = �+120 +20 +30+20 +40 +50+30 +50 −10
� .
Základem řešení hlavních napětí je kubická rovnice sestavená původního systému: +𝜎𝜎3 − 𝐼𝐼1 ∙ 𝜎𝜎2 + 𝐼𝐼2 ∙ 𝜎𝜎 − 𝐼𝐼3 = 0 .
Dále vypočteme jeho jednotlivé invarianty:
𝐼𝐼1 = 𝜎𝜎𝑚𝑚 + 𝜎𝜎𝑦𝑦 + 𝜎𝜎𝑧𝑧 = +120 + 40 + (−10) = 150 N ∙ mm−2 ,
𝐼𝐼2 = �𝜎𝜎𝑚𝑚 𝜏𝜏𝑧𝑧𝜏𝜏𝑧𝑧 𝜎𝜎𝑦𝑦
� + �𝜎𝜎𝑦𝑦 𝜏𝜏𝑚𝑚𝜏𝜏𝑚𝑚 𝜎𝜎𝑧𝑧
� + �𝜎𝜎𝑚𝑚 𝜏𝜏𝑦𝑦𝜏𝜏𝑦𝑦 𝜎𝜎𝑧𝑧
� = �+120 +20+20 +40� + �+40 +50
+50 −10� + �+120 +30+30 −10� =
= +4 800 − 400 − 400 − 2 500 − 1 200 − 900 = −60 (N ∙ mm−2)2 ,
𝐼𝐼3 = �𝜎𝜎𝑚𝑚 𝜏𝜏𝑧𝑧 𝜏𝜏𝑦𝑦𝜏𝜏𝑧𝑧 𝜎𝜎𝑦𝑦 𝜏𝜏𝑚𝑚𝜏𝜏𝑦𝑦 𝜏𝜏𝑚𝑚 𝜎𝜎𝑧𝑧
� = �+120 +20 +30+20 +40 +50+30 +50 −10
� =
= 1000 ∙ [−48 + 30 + 30 − (36 + 300 − 4)] = −320 000 (N ∙ mm−2)3 .
Tyto hodnoty dosadíme do základní kubické rovnice: +𝜎𝜎3 − 150 ∙ 𝜎𝜎2 + (−60) ∙ 𝜎𝜎 − (−320 000) = 0 .
Jejím řešením získáme TŘI REÁLNÉ kořeny, které jsou hledanými hlavními napětími σ1, σ2 a σ3: σ1 = +132,12 N⋅mm-2 , σ2 = +58,96 N⋅mm-2 a σ3 = −41,08 N⋅mm-2 .
Poznámka: Správnost výpočtu ověříme výpočtem invariant I1, I2 a I3 z vypočtených hlavních napětí σ1, σ2 a σ3: 𝐼𝐼1 = 𝜎𝜎1 + 𝜎𝜎2 + 𝜎𝜎3 = 132,12 + 58,96 + (−41,08) = 150 N ∙ mm−2, 𝐼𝐼2 = 𝜎𝜎1 ∙ 𝜎𝜎2 + 𝜎𝜎2 ∙ 𝜎𝜎3 + 𝜎𝜎3 ∙ 𝜎𝜎1 = 132,12 ∙ 58,96 + 58,96 ∙ (−41,08) + (−41,08) ∙ 132,12 = −59,8 (N ∙ mm−2)2, 𝐼𝐼3 = 𝜎𝜎1 ∙ 𝜎𝜎2 ∙ 𝜎𝜎3 = 132,12 ∙ 58,96 ∙ (−41,08) = −320 004,7 (N ∙ mm−2)3, Z výsledků je patrné, že se jednotlivé invarianty (neměnné hodnoty) transformací tenzoru napětí nezměnily. Nepatrné rozdíly (0,3% a 0,001%) jsou způsobeny pouze chybou zaokrouhlováním na dvě desetinná místa. Pro připomenutí z PP I si ještě zobrazíme úplný Mohrův diagram zadané napjatosti:
x z
y
σx
σy
σz
τx τy
τz
σ[N·mm−2]
80
60
40
20
−60 −40 −20 0 20 40 60 80 100 120 140 160 σ[N·mm−2]
Oblast, kde se může vyskytovat napětí v libovolném řezu zadané napjatosti obecnou rovinou
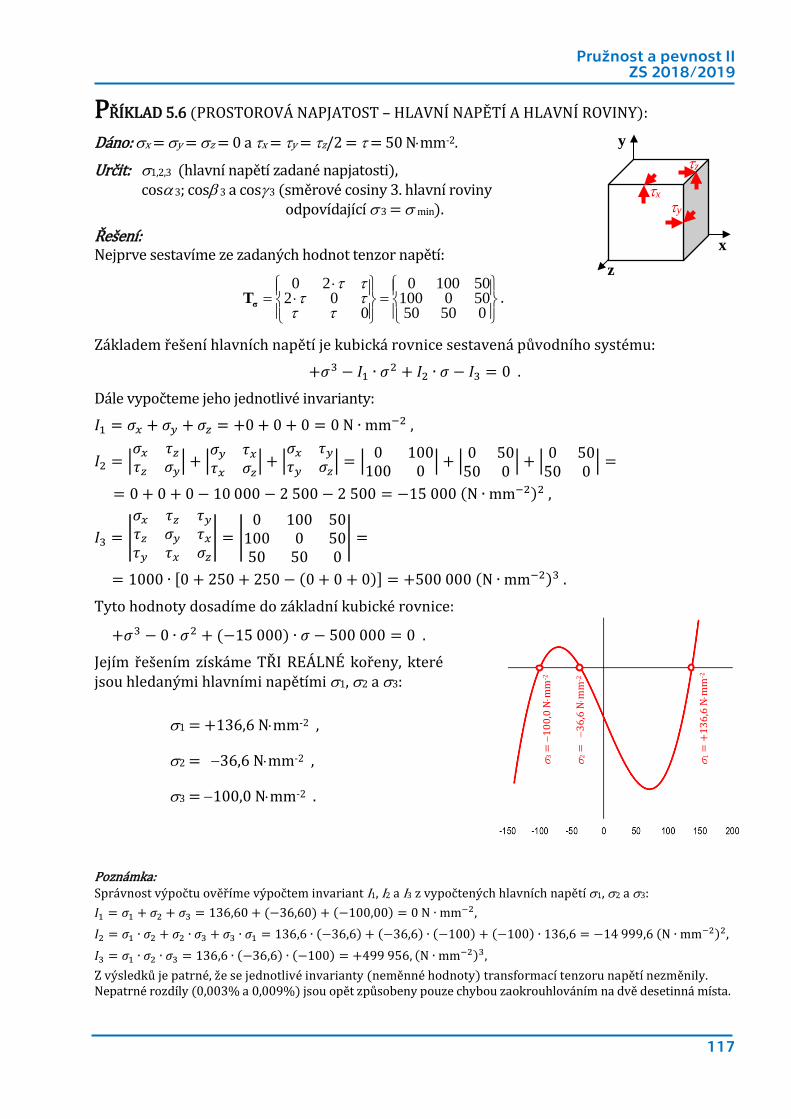
Pružnost a pevnost II ZS 2018/2019
117
PŘÍKLAD 5.6 (PROSTOROVÁ NAPJATOST – HLAVNÍ NAPĚTÍ A HLAVNÍ ROVINY):
Dáno: σx = σy = σz = 0 a τx = τy = τz/2 = τ = 50 N⋅mm-2.
Určit: σ1,2,3 (hlavní napětí zadané napjatosti), cosα 3; cosβ 3 a cosγ 3 (směrové cosiny 3. hlavní roviny
odpovídající σ 3 = σ min).
Řešení: Nejprve sestavíme ze zadaných hodnot tenzor napětí:
=
⋅⋅
=05050
500100501000
002
20
ττττττ
σT .
Základem řešení hlavních napětí je kubická rovnice sestavená původního systému:
+𝜎𝜎3 − 𝐼𝐼1 ∙ 𝜎𝜎2 + 𝐼𝐼2 ∙ 𝜎𝜎 − 𝐼𝐼3 = 0 .
Dále vypočteme jeho jednotlivé invarianty:
𝐼𝐼1 = 𝜎𝜎𝑚𝑚 + 𝜎𝜎𝑦𝑦 + 𝜎𝜎𝑧𝑧 = +0 + 0 + 0 = 0 N ∙ mm−2 ,
𝐼𝐼2 = �𝜎𝜎𝑚𝑚 𝜏𝜏𝑧𝑧𝜏𝜏𝑧𝑧 𝜎𝜎𝑦𝑦
� + �𝜎𝜎𝑦𝑦 𝜏𝜏𝑚𝑚𝜏𝜏𝑚𝑚 𝜎𝜎𝑧𝑧
� + �𝜎𝜎𝑚𝑚 𝜏𝜏𝑦𝑦𝜏𝜏𝑦𝑦 𝜎𝜎𝑧𝑧
� = � 0 100100 0 � + � 0 50
50 0 � + � 0 5050 0 � =
= 0 + 0 + 0 − 10 000 − 2 500 − 2 500 = −15 000 (N ∙ mm−2)2 ,
𝐼𝐼3 = �𝜎𝜎𝑚𝑚 𝜏𝜏𝑧𝑧 𝜏𝜏𝑦𝑦𝜏𝜏𝑧𝑧 𝜎𝜎𝑦𝑦 𝜏𝜏𝑚𝑚𝜏𝜏𝑦𝑦 𝜏𝜏𝑚𝑚 𝜎𝜎𝑧𝑧
� = �0 100 50
100 0 5050 50 0
� =
= 1000 ∙ [0 + 250 + 250 − (0 + 0 + 0)] = +500 000 (N ∙ mm−2)3 .
Tyto hodnoty dosadíme do základní kubické rovnice:
+𝜎𝜎3 − 0 ∙ 𝜎𝜎2 + (−15 000) ∙ 𝜎𝜎 − 500 000 = 0 .
Jejím řešením získáme TŘI REÁLNÉ kořeny, které jsou hledanými hlavními napětími σ1, σ2 a σ3:
σ1 = +136,6 N⋅mm-2 ,
σ2 = −36,6 N⋅mm-2 ,
σ3 = −100,0 N⋅mm-2 .
Poznámka: Správnost výpočtu ověříme výpočtem invariant I1, I2 a I3 z vypočtených hlavních napětí σ1, σ2 a σ3: 𝐼𝐼1 = 𝜎𝜎1 + 𝜎𝜎2 + 𝜎𝜎3 = 136,60 + (−36,60) + (−100,00) = 0 N ∙ mm−2, 𝐼𝐼2 = 𝜎𝜎1 ∙ 𝜎𝜎2 + 𝜎𝜎2 ∙ 𝜎𝜎3 + 𝜎𝜎3 ∙ 𝜎𝜎1 = 136,6 ∙ (−36,6) + (−36,6) ∙ (−100) + (−100) ∙ 136,6 = −14 999,6 (N ∙ mm−2)2, 𝐼𝐼3 = 𝜎𝜎1 ∙ 𝜎𝜎2 ∙ 𝜎𝜎3 = 136,6 ∙ (−36,6) ∙ (−100) = +499 956, (N ∙ mm−2)3, Z výsledků je patrné, že se jednotlivé invarianty (neměnné hodnoty) transformací tenzoru napětí nezměnily. Nepatrné rozdíly (0,003% a 0,009%) jsou opět způsobeny pouze chybou zaokrouhlováním na dvě desetinná místa.
x z
y
τx τy
τz
σ 3 =
−10
0,0
N⋅m
m-2
σ 2
= −
36,6
N⋅m
m-2
σ 1
= +
136,
6 N
⋅mm
-2
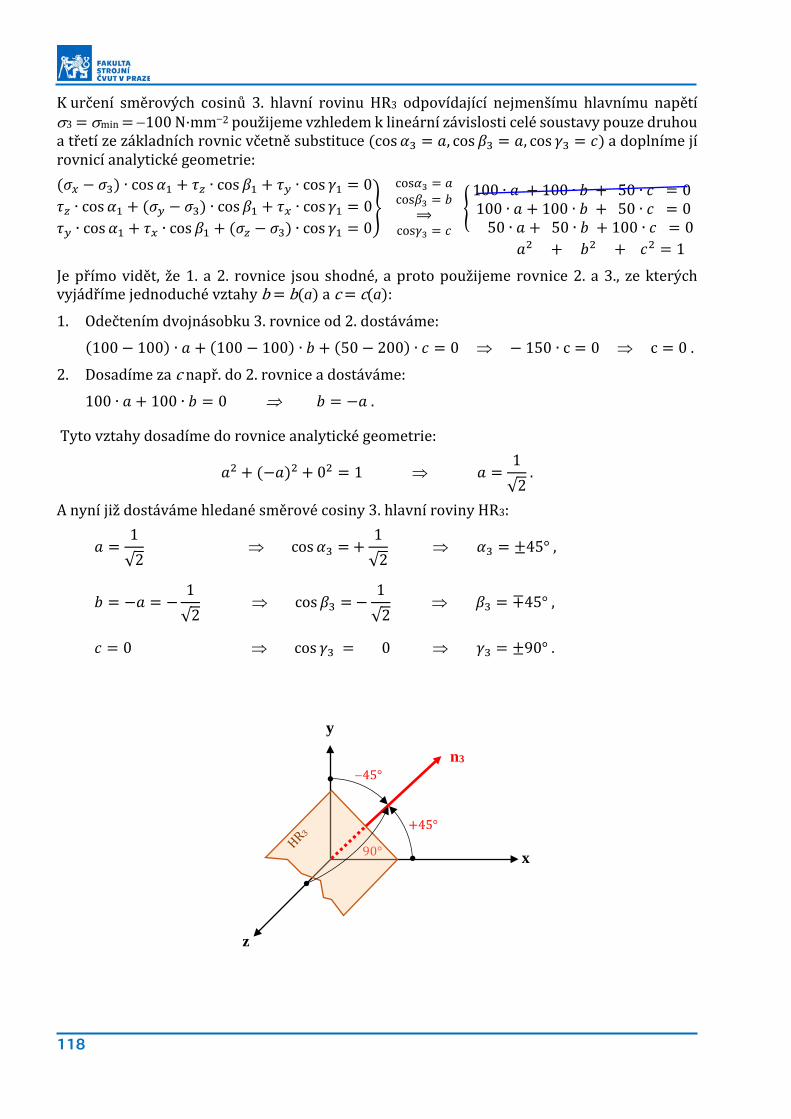
118
K určení směrových cosinů 3. hlavní rovinu HR3 odpovídající nejmenšímu hlavnímu napětí σ3 = σmin = −100 N·mm−2 použijeme vzhledem k lineární závislosti celé soustavy pouze druhou a třetí ze základních rovnic včetně substituce (cos 𝛼𝛼3 = 𝑎𝑎, cos 𝛽𝛽3 = 𝑎𝑎, cos 𝛾𝛾3 = 𝑐𝑐) a doplníme jí rovnicí analytické geometrie: (𝜎𝜎𝑚𝑚 − 𝜎𝜎3) ∙ cos 𝛼𝛼1 + 𝜏𝜏𝑧𝑧 ∙ cos 𝛽𝛽1 + 𝜏𝜏𝑦𝑦 ∙ cos 𝛾𝛾1 = 0𝜏𝜏𝑧𝑧 ∙ cos 𝛼𝛼1 + (𝜎𝜎𝑦𝑦 − 𝜎𝜎3) ∙ cos 𝛽𝛽1 + 𝜏𝜏𝑚𝑚 ∙ cos 𝛾𝛾1 = 0𝜏𝜏𝑦𝑦 ∙ cos 𝛼𝛼1 + 𝜏𝜏𝑚𝑚 ∙ cos 𝛽𝛽1 + (𝜎𝜎𝑧𝑧 − 𝜎𝜎3) ∙ cos 𝛾𝛾1 = 0
� cos𝛼𝛼3 = 𝑎𝑎cos𝛽𝛽3 = 𝑏𝑏
⟹cos𝛾𝛾3 = 𝑐𝑐
�100 ∙ 𝑎𝑎 + 100 ∙ 𝑏𝑏 + 50 ∙ 𝑐𝑐 = 0 100 ∙ 𝑎𝑎 + 100 ∙ 𝑏𝑏 + 50 ∙ 𝑐𝑐 = 0 50 ∙ 𝑎𝑎 + 50 ∙ 𝑏𝑏 + 100 ∙ 𝑐𝑐 = 0
𝑎𝑎2 + 𝑏𝑏2 + 𝑐𝑐2 = 1
Je přímo vidět, že 1. a 2. rovnice jsou shodné, a proto použijeme rovnice 2. a 3., ze kterých vyjádříme jednoduché vztahy b = b(a) a c = c(a):
1. Odečtením dvojnásobku 3. rovnice od 2. dostáváme: (100 − 100) ∙ 𝑎𝑎 + (100 − 100) ∙ 𝑏𝑏 + (50 − 200) ∙ 𝑐𝑐 = 0 ⇒ − 150 ∙ c = 0 ⇒ c = 0 .
2. Dosadíme za c např. do 2. rovnice a dostáváme:
100 ∙ 𝑎𝑎 + 100 ∙ 𝑏𝑏 = 0 ⇒ 𝑏𝑏 = −𝑎𝑎 .
Tyto vztahy dosadíme do rovnice analytické geometrie:
𝑎𝑎2 + (−𝑎𝑎)2 + 02 = 1 ⇒ 𝑎𝑎 =1
√2 .
A nyní již dostáváme hledané směrové cosiny 3. hlavní roviny HR3:
𝑎𝑎 =1
√2 ⇒ cos 𝛼𝛼3 = +
1√2
⇒ 𝛼𝛼3 = ±45° ,
𝑏𝑏 = −𝑎𝑎 = −1
√2 ⇒ cos 𝛽𝛽3 = −
1√2
⇒ 𝛽𝛽3 = ∓45° ,
𝑐𝑐 = 0 ⇒ cos 𝛾𝛾3 = 0 ⇒ 𝛾𝛾3 = ±90° .
x
y
z
+45°
−45°
90°
n3

Pružnost a pevnost II ZS 2018/2019
119
PŘÍKLAD 5.7 (HLAVNÍ DEFORMACE A HLAVNÍ NAPĚTÍ):
Dáno: εx = 80⋅10−6; εy = 20⋅10−6 a εz = 60⋅10−6, γx/2 = 50⋅10−6; γy/2 = 30⋅10−6 a γz/2 = 40⋅10−6.
Určit: ε1,2,3 (hlavní deformace zadané napjatosti). σ1,2,3 (hlavní napětí zadané napjatosti).
Řešení: Nejprve sestavíme ze zadaných hodnot tenzor přetvoření (deformací):
𝐓𝐓𝛔𝛔 = �𝜀𝜀𝑚𝑚 𝛾𝛾𝑧𝑧/2 𝛾𝛾𝑦𝑦/2
𝛾𝛾𝑧𝑧/2 𝜀𝜀𝑦𝑦 𝛾𝛾𝑚𝑚/2𝛾𝛾𝑦𝑦/2 𝛾𝛾𝑚𝑚/2 𝜀𝜀𝑧𝑧
� = �80 ∙ 10−6 40 ∙ 10−6 30 ∙ 10−6
40 ∙ 10−6 20 ∙ 10−6 50 ∙ 10−6
30 ∙ 10−6 50 ∙ 10−6 60 ∙ 10−6� .
Základem řešení hlavních napětí je kubická rovnice sestavená původního systému:
+𝜀𝜀3 − 𝐼𝐼1𝜀𝜀 ∙ 𝜀𝜀2 + 𝐼𝐼2𝜀𝜀 ∙ 𝜀𝜀 − 𝐼𝐼3𝜀𝜀 = 0 .
Dále vypočteme jeho jednotlivé invarianty:
𝐼𝐼1𝜀𝜀 = 𝜀𝜀𝑚𝑚 + 𝜀𝜀𝑦𝑦 + 𝜀𝜀𝑧𝑧 = (80 + 20 + 60) ∙ 10−6 = 160 ∙ 10−6 ,
𝐼𝐼2 = �𝜀𝜀𝑚𝑚 𝛾𝛾𝑧𝑧/2
𝛾𝛾𝑧𝑧/2 𝜎𝜎𝑦𝑦� + �
𝜀𝜀𝑦𝑦 𝛾𝛾𝑚𝑚/2𝛾𝛾𝑚𝑚/2 𝜀𝜀𝑧𝑧
� + �𝜀𝜀𝑚𝑚 𝛾𝛾𝑦𝑦/2
𝛾𝛾𝑦𝑦/2 𝜀𝜀𝑧𝑧� =
= �80 ∙ 10−6 40 ∙ 10−6
40 ∙ 10−6 20 ∙ 10−6� + �20 ∙ 10−6 50 ∙ 10−6
50 ∙ 10−6 60 ∙ 10−6� + �80 ∙ 10−6 30 ∙ 10−6
30 ∙ 10−6 60 ∙ 10−6� =
= (1 600 − 1 600 + 1 200 − 2 500 + 4 800 − 900) ∙ 10−12 = 2 600 ∙ 10−12,
𝐼𝐼3 = �𝜀𝜀𝑚𝑚 𝛾𝛾𝑧𝑧/2 𝛾𝛾𝑦𝑦/2
𝛾𝛾𝑧𝑧/2 𝜀𝜀𝑦𝑦 𝛾𝛾𝑚𝑚/2𝛾𝛾𝑦𝑦/2 𝛾𝛾𝑚𝑚/2 𝜀𝜀𝑧𝑧
� = �80 ∙ 10−6 40 ∙ 10−6 30 ∙ 10−6
40 ∙ 10−6 20 ∙ 10−6 50 ∙ 10−6
30 ∙ 10−6 50 ∙ 10−6 60 ∙ 10−6� =
= �96 000 + 60 000 + 60 000 − �18 000 + 96 000 + 200 000�� = −98 000 ∙ 10−18 .
Tyto hodnoty dosadíme do základní kubické rovnice:
+𝜀𝜀3 − 160 ∙ 10−6 ∙ 𝜎𝜎2 + 2 600 ∙ 10−12 ∙ 𝜀𝜀 − (−98 000 ∙ 10−18) = 0 .
Jejím řešením získáme TŘI REÁLNÉ kořeny, které jsou hledanými hlavními napětími σ1, σ2 a σ3:
𝜀𝜀1 = 135,5 ∙ 10−6 ; 𝜀𝜀2 = 41,8 ∙ 10−6 a 𝜀𝜀3 = −17,3 ∙ 10−6 .
Pro výpočet hlavních napětí použijeme rozšířený Hookův zákon:
𝜎𝜎1 = 𝐸𝐸 ∙𝜀𝜀1 ∙ (1 − 𝑣𝑣2) + (𝜀𝜀2 + 𝜀𝜀3) ∙ (𝑣𝑣 + 𝑣𝑣2)
1 − 3 ∙ 𝑣𝑣2 − 2 ∙ 𝑣𝑣3 =
= 2,1 ∙ 105 ∙135,5 ∙ 10−6 ∙ (1 − 0,32) + (41,8 − 17,3) ∙ 10−6 ∙ (0,3 + 0,32)
1 − 3 ∙ 0,32 − 2 ∙ 0,33 = 41,3 N ∙ mm−2.
𝜎𝜎2 = 𝐸𝐸 ∙𝜀𝜀2 ∙ (1 − 𝑣𝑣2) + (𝜀𝜀1 + 𝜀𝜀3) ∙ (𝑣𝑣 + 𝑣𝑣2)
1 − 3 ∙ 𝑣𝑣2 − 2 ∙ 𝑣𝑣3 = 26,1 N ∙ mm−2,
𝜎𝜎3 = 𝐸𝐸 ∙𝜀𝜀3 ∙ (1 − 𝑣𝑣2) + (𝜀𝜀1 + 𝜀𝜀2) ∙ (𝑣𝑣 + 𝑣𝑣2)
1 − 3 ∙ 𝑣𝑣2 − 2 ∙ 𝑣𝑣3 = 16,6 N ∙ mm−2.
x z
y
σx
σy
σz
τx τy
τz
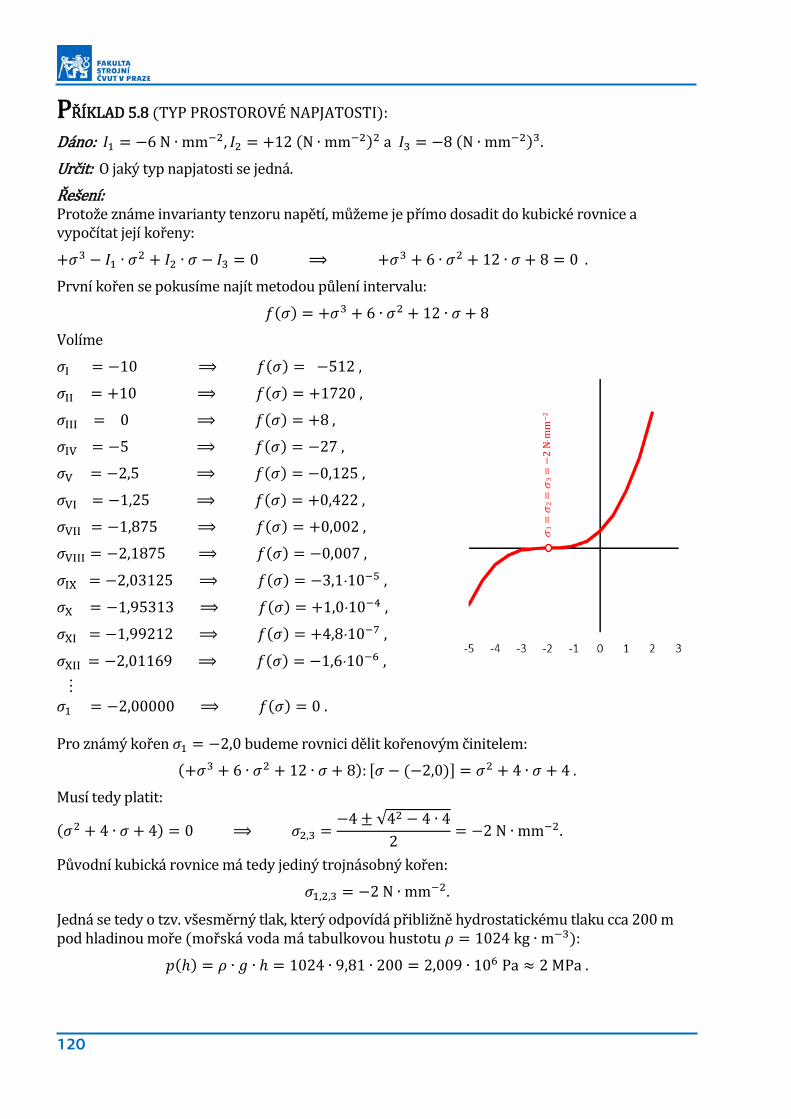
120
PŘÍKLAD 5.8 (TYP PROSTOROVÉ NAPJATOSTI):
Dáno: 𝐼𝐼1 = −6 N ∙ mm−2, 𝐼𝐼2 = +12 (N ∙ mm−2)2 a 𝐼𝐼3 = −8 (N ∙ mm−2)3.
Určit: O jaký typ napjatosti se jedná.
Řešení: Protože známe invarianty tenzoru napětí, můžeme je přímo dosadit do kubické rovnice a vypočítat její kořeny:
+𝜎𝜎3 − 𝐼𝐼1 ∙ 𝜎𝜎2 + 𝐼𝐼2 ∙ 𝜎𝜎 − 𝐼𝐼3 = 0 ⟹ +𝜎𝜎3 + 6 ∙ 𝜎𝜎2 + 12 ∙ 𝜎𝜎 + 8 = 0 .
První kořen se pokusíme najít metodou půlení intervalu:
𝑓𝑓(𝜎𝜎) = +𝜎𝜎3 + 6 ∙ 𝜎𝜎2 + 12 ∙ 𝜎𝜎 + 8
Volíme
𝜎𝜎I = −10 ⟹ 𝑓𝑓(𝜎𝜎) = −512 ,
𝜎𝜎II = +10 ⟹ 𝑓𝑓(𝜎𝜎) = +1720 ,
𝜎𝜎III = 0 ⟹ 𝑓𝑓(𝜎𝜎) = +8 ,
𝜎𝜎IV = −5 ⟹ 𝑓𝑓(𝜎𝜎) = −27 ,
𝜎𝜎V = −2,5 ⟹ 𝑓𝑓(𝜎𝜎) = −0,125 ,
𝜎𝜎VI = −1,25 ⟹ 𝑓𝑓(𝜎𝜎) = +0,422 ,
𝜎𝜎VII = −1,875 ⟹ 𝑓𝑓(𝜎𝜎) = +0,002 ,
𝜎𝜎VIII = −2,1875 ⟹ 𝑓𝑓(𝜎𝜎) = −0,007 ,
𝜎𝜎IX = −2,03125 ⟹ 𝑓𝑓(𝜎𝜎) = −3,1⋅10−5 ,
𝜎𝜎X = −1,95313 ⟹ 𝑓𝑓(𝜎𝜎) = +1,0⋅10−4 ,
𝜎𝜎XI = −1,99212 ⟹ 𝑓𝑓(𝜎𝜎) = +4,8⋅10−7 ,
𝜎𝜎XII = −2,01169 ⟹ 𝑓𝑓(𝜎𝜎) = −1,6⋅10−6 ,
𝜎𝜎1 = −2,00000 ⟹ 𝑓𝑓(𝜎𝜎) = 0 . Pro známý kořen 𝜎𝜎1 = −2,0 budeme rovnici dělit kořenovým činitelem:
(+𝜎𝜎3 + 6 ∙ 𝜎𝜎2 + 12 ∙ 𝜎𝜎 + 8): [𝜎𝜎 − (−2,0)] = 𝜎𝜎2 + 4 ∙ 𝜎𝜎 + 4 .
Musí tedy platit:
(𝜎𝜎2 + 4 ∙ 𝜎𝜎 + 4) = 0 ⟹ 𝜎𝜎2,3 =−4 ± √42 − 4 ∙ 4
2= −2 N ∙ mm−2.
Původní kubická rovnice má tedy jediný trojnásobný kořen:
𝜎𝜎1,2,3 = −2 N ∙ mm−2.
Jedná se tedy o tzv. všesměrný tlak, který odpovídá přibližně hydrostatickému tlaku cca 200 m pod hladinou moře (mořská voda má tabulkovou hustotu 𝜌𝜌 = 1024 kg ∙ m−3):
𝑝𝑝(ℎ) = 𝜌𝜌 ∙ 𝑔𝑔 ∙ ℎ = 1024 ∙ 9,81 ∙ 200 = 2,009 ∙ 106 Pa ≈ 2 MPa .
σ 1 =
σ 2
= σ
3 =
−2
N⋅m
m−
2
…
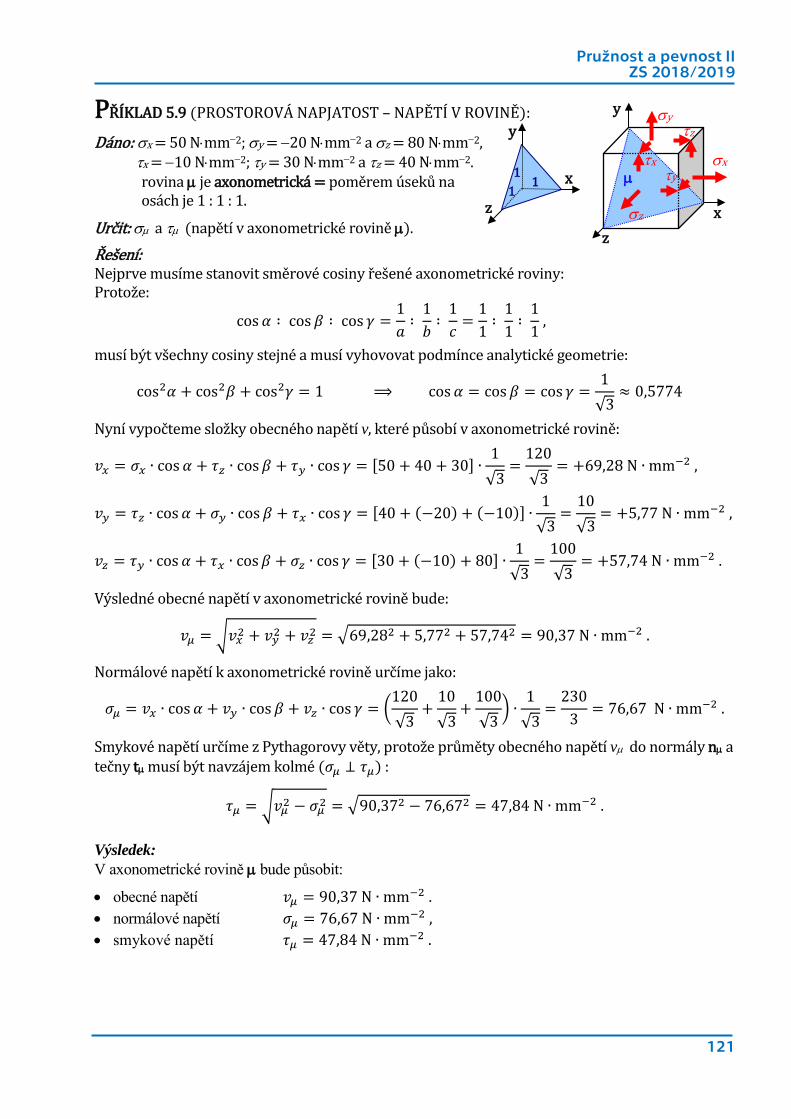
Pružnost a pevnost II ZS 2018/2019
121
PŘÍKLAD 5.9 (PROSTOROVÁ NAPJATOST – NAPĚTÍ V ROVINĚ):
Dáno: σx = 50 N⋅mm−2; σy = −20 N⋅mm−2 a σz = 80 N⋅mm−2, τx = −10 N⋅mm−2; τy = 30 N⋅mm−2 a τz = 40 N⋅mm−2.
rovina µ je axonometrická = poměrem úseků na osách je 1 : 1 : 1.
Určit: σµ a τµ (napětí v axonometrické rovině µ).
Řešení: Nejprve musíme stanovit směrové cosiny řešené axonometrické roviny: Protože:
cos 𝛼𝛼 ∶ cos 𝛽𝛽 ∶ cos 𝛾𝛾 =1𝑎𝑎
∶ 1𝑏𝑏
∶ 1𝑐𝑐
=11
∶ 11
∶ 11
,
musí být všechny cosiny stejné a musí vyhovovat podmínce analytické geometrie:
cos2𝛼𝛼 + cos2𝛽𝛽 + cos2𝛾𝛾 = 1 ⟹ cos 𝛼𝛼 = cos 𝛽𝛽 = cos 𝛾𝛾 =1
√3≈ 0,5774
Nyní vypočteme složky obecného napětí v, které působí v axonometrické rovině:
𝑣𝑣𝑚𝑚 = 𝜎𝜎𝑚𝑚 ∙ cos 𝛼𝛼 + 𝜏𝜏𝑧𝑧 ∙ cos 𝛽𝛽 + 𝜏𝜏𝑦𝑦 ∙ cos 𝛾𝛾 = [50 + 40 + 30] ∙1
√3=
120√3
= +69,28 N ∙ mm−2 ,
𝑣𝑣𝑦𝑦 = 𝜏𝜏𝑧𝑧 ∙ cos 𝛼𝛼 + 𝜎𝜎𝑦𝑦 ∙ cos 𝛽𝛽 + 𝜏𝜏𝑚𝑚 ∙ cos 𝛾𝛾 = [40 + (−20) + (−10)] ∙1
√3=
10√3
= +5,77 N ∙ mm−2 ,
𝑣𝑣𝑧𝑧 = 𝜏𝜏𝑦𝑦 ∙ cos 𝛼𝛼 + 𝜏𝜏𝑚𝑚 ∙ cos 𝛽𝛽 + 𝜎𝜎𝑧𝑧 ∙ cos 𝛾𝛾 = [30 + (−10) + 80] ∙1
√3=
100√3
= +57,74 N ∙ mm−2 .
Výsledné obecné napětí v axonometrické rovině bude:
𝑣𝑣𝜇𝜇 = �𝑣𝑣𝑚𝑚2 + 𝑣𝑣𝑦𝑦
2 + 𝑣𝑣𝑧𝑧2 = �69,282 + 5,772 + 57,742 = 90,37 N ∙ mm−2 .
Normálové napětí k axonometrické rovině určíme jako:
𝜎𝜎𝜇𝜇 = 𝑣𝑣𝑚𝑚 ∙ cos 𝛼𝛼 + 𝑣𝑣𝑦𝑦 ∙ cos 𝛽𝛽 + 𝑣𝑣𝑧𝑧 ∙ cos 𝛾𝛾 = �120√3
+10√3
+100√3
� ∙1
√3=
2303
= 76,67 N ∙ mm−2 .
Smykové napětí určíme z Pythagorovy věty, protože průměty obecného napětí vµ do normály nµ a tečny tµ musí být navzájem kolmé (𝜎𝜎𝜇𝜇 ⊥ 𝜏𝜏𝜇𝜇) :
𝜏𝜏𝜇𝜇 = �𝑣𝑣𝜇𝜇2 − 𝜎𝜎𝜇𝜇
2 = �90,372 − 76,672 = 47,84 N ∙ mm−2 .
Výsledek: V axonometrické rovině µ bude působit:
• obecné napětí 𝑣𝑣𝜇𝜇 = 90,37 N ∙ mm−2 . • normálové napětí 𝜎𝜎𝜇𝜇 = 76,67 N ∙ mm−2 , • smykové napětí 𝜏𝜏𝜇𝜇 = 47,84 N ∙ mm−2 .
x z
y
σx
σy τz
µ
σz
τx τy 1
1 1
x
z
y
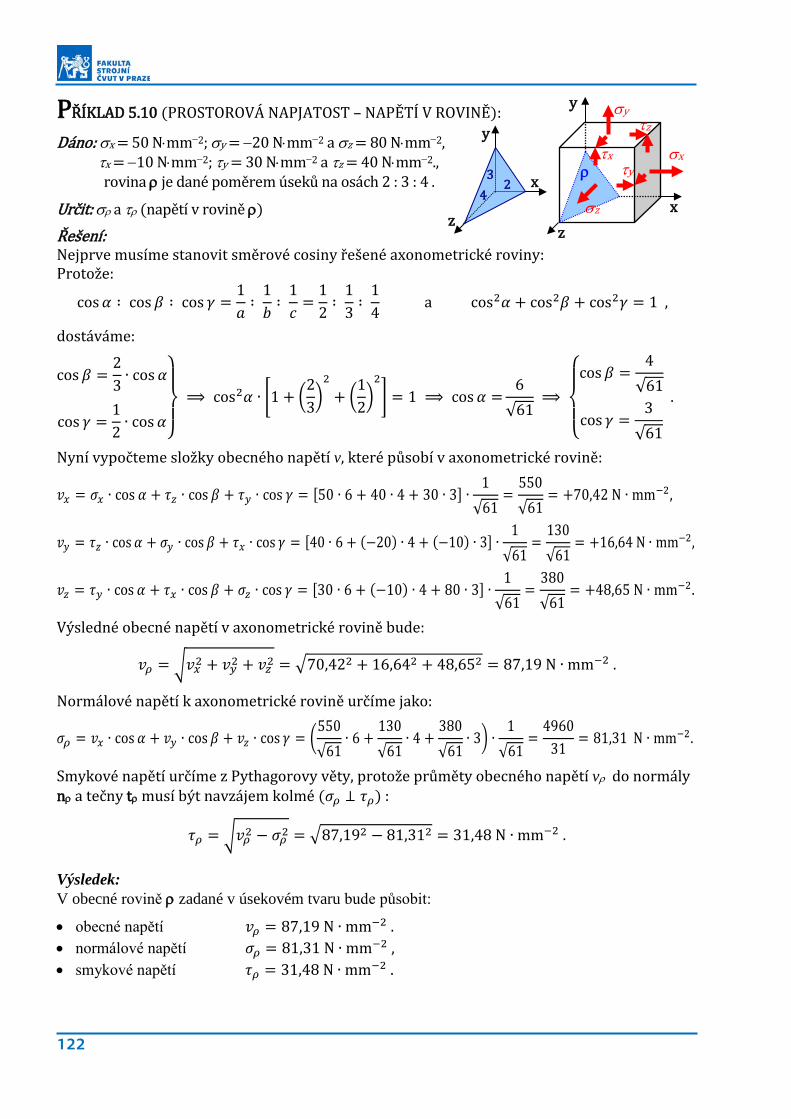
122
PŘÍKLAD 5.10 (PROSTOROVÁ NAPJATOST – NAPĚTÍ V ROVINĚ):
Dáno: σx = 50 N⋅mm−2; σy = −20 N⋅mm−2 a σz = 80 N⋅mm−2, τx = −10 N⋅mm−2; τy = 30 N⋅mm−2 a τz = 40 N⋅mm−2.,
rovina ρ je dané poměrem úseků na osách 2 : 3 : 4 .
Určit: σρ a τρ (napětí v rovině ρ)
Řešení: Nejprve musíme stanovit směrové cosiny řešené axonometrické roviny: Protože:
cos 𝛼𝛼 ∶ cos 𝛽𝛽 ∶ cos 𝛾𝛾 =1𝑎𝑎
∶ 1𝑏𝑏
∶ 1𝑐𝑐
=12
∶ 13
∶ 14
a cos2𝛼𝛼 + cos2𝛽𝛽 + cos2𝛾𝛾 = 1 ,
dostáváme:
cos 𝛽𝛽 =23
∙ cos 𝛼𝛼
cos 𝛾𝛾 =12
∙ cos 𝛼𝛼⎭⎪⎬
⎪⎫
⟹ cos2𝛼𝛼 ∙ �1 + �23
�2
+ �12
�2
� = 1 ⟹ cos 𝛼𝛼 =6
√61 ⟹
⎩⎪⎨
⎪⎧cos 𝛽𝛽 =
4√61
cos 𝛾𝛾 =3
√61
.
Nyní vypočteme složky obecného napětí v, které působí v axonometrické rovině:
𝑣𝑣𝑚𝑚 = 𝜎𝜎𝑚𝑚 ∙ cos 𝛼𝛼 + 𝜏𝜏𝑧𝑧 ∙ cos 𝛽𝛽 + 𝜏𝜏𝑦𝑦 ∙ cos 𝛾𝛾 = [50 ∙ 6 + 40 ∙ 4 + 30 ∙ 3] ∙1
√61=
550√61
= +70,42 N ∙ mm−2,
𝑣𝑣𝑦𝑦 = 𝜏𝜏𝑧𝑧 ∙ cos 𝛼𝛼 + 𝜎𝜎𝑦𝑦 ∙ cos 𝛽𝛽 + 𝜏𝜏𝑚𝑚 ∙ cos 𝛾𝛾 = [40 ∙ 6 + (−20) ∙ 4 + (−10) ∙ 3] ∙1
√61=
130√61
= +16,64 N ∙ mm−2,
𝑣𝑣𝑧𝑧 = 𝜏𝜏𝑦𝑦 ∙ cos 𝛼𝛼 + 𝜏𝜏𝑚𝑚 ∙ cos 𝛽𝛽 + 𝜎𝜎𝑧𝑧 ∙ cos 𝛾𝛾 = [30 ∙ 6 + (−10) ∙ 4 + 80 ∙ 3] ∙1
√61=
380√61
= +48,65 N ∙ mm−2.
Výsledné obecné napětí v axonometrické rovině bude:
𝑣𝑣𝜌𝜌 = �𝑣𝑣𝑚𝑚2 + 𝑣𝑣𝑦𝑦
2 + 𝑣𝑣𝑧𝑧2 = �70,422 + 16,642 + 48,652 = 87,19 N ∙ mm−2 .
Normálové napětí k axonometrické rovině určíme jako:
𝜎𝜎𝜌𝜌 = 𝑣𝑣𝑚𝑚 ∙ cos 𝛼𝛼 + 𝑣𝑣𝑦𝑦 ∙ cos 𝛽𝛽 + 𝑣𝑣𝑧𝑧 ∙ cos 𝛾𝛾 = �550√61
∙ 6 +130√61
∙ 4 +380√61
∙ 3� ∙1
√61=
496031
= 81,31 N ∙ mm−2.
Smykové napětí určíme z Pythagorovy věty, protože průměty obecného napětí vρ do normály nρ a tečny tρ musí být navzájem kolmé (𝜎𝜎𝜌𝜌 ⊥ 𝜏𝜏𝜌𝜌) :
𝜏𝜏𝜌𝜌 = �𝑣𝑣𝜌𝜌2 − 𝜎𝜎𝜌𝜌
2 = �87,192 − 81,312 = 31,48 N ∙ mm−2 .
Výsledek: V obecné rovině ρ zadané v úsekovém tvaru bude působit:
• obecné napětí 𝑣𝑣𝜌𝜌 = 87,19 N ∙ mm−2 . • normálové napětí 𝜎𝜎𝜌𝜌 = 81,31 N ∙ mm−2 , • smykové napětí 𝜏𝜏𝜌𝜌 = 31,48 N ∙ mm−2 .
x z
y
σx
σy τz
ρ
σz
τx τy
2 3
4 x
z
y
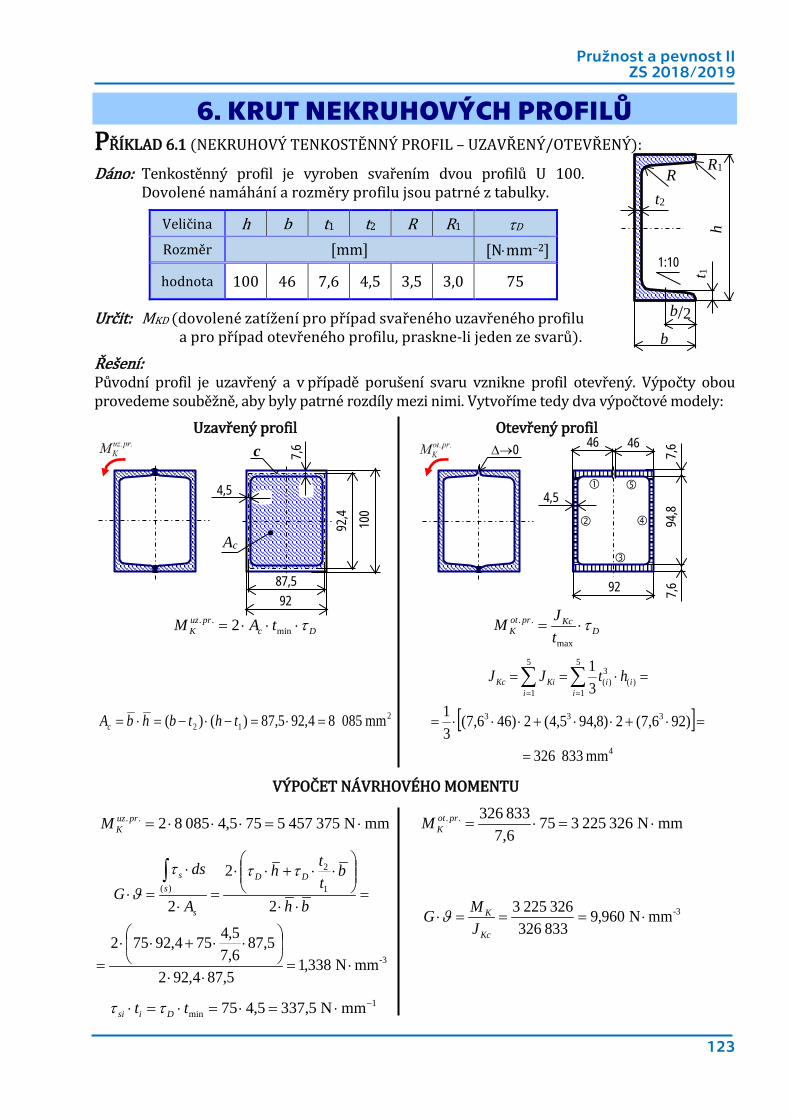
Pružnost a pevnost II ZS 2018/2019
123
6. KRUT NEKRUHOVÝCH PROFILŮ PŘÍKLAD 6.1 (NEKRUHOVÝ TENKOSTĚNNÝ PROFIL – UZAVŘENÝ/OTEVŘENÝ):
Dáno: Tenkostěnný profil je vyroben svařením dvou profilů U 100. Dovolené namáhání a rozměry profilu jsou patrné z tabulky.
Veličina h b t1 t2 R R1 τD
Rozměr [mm] [N⋅mm–2]
hodnota 100 46 7,6 4,5 3,5 3,0 75
Určit: MKD (dovolené zatížení pro případ svařeného uzavřeného profilu a pro případ otevřeného profilu, praskne-li jeden ze svarů).
Řešení: Původní profil je uzavřený a v případě porušení svaru vznikne profil otevřený. Výpočty obou provedeme souběžně, aby byly patrné rozdíly mezi nimi. Vytvoříme tedy dva výpočtové modely:
Uzavřený profil Otevřený profil
Dcpruz
K tAM τ⋅⋅⋅= min.. 2 D
KcprotK t
JM τ⋅=max
..
212 mm08584,925,87)()( =⋅=−⋅−=⋅= thtbhbAc [ ]
4
333
5
1)(
3)(
5
1
mm833326
)926,7(2)8,945,4(2)466,7(31
31
=
=⋅+⋅⋅+⋅⋅⋅=
=⋅== ∑∑== i
iii
KiKc htJJ
VÝPOČET NÁVRHOVÉHO MOMENTU
mmN3754575755,408582.. ⋅=⋅⋅⋅=pruzKM mmN326225375
6,7833326.. ⋅=⋅=prot
KM
-3
1
2
)(
mmN338,15,874,922
5,876,75,4754,92752
2
2
2
⋅=⋅⋅
⋅⋅+⋅⋅=
=⋅⋅
⋅⋅+⋅⋅
=⋅
⋅
=⋅∫
bh
btth
A
dsG
DD
s
ss τττ
ϑ -3mmN960,9
8333263262253
⋅===⋅Kc
K
JMG ϑ
1min mmN5,3375,475 −⋅=⋅=⋅=⋅ tt Disi ττ
b
R
b/2
R1
t2
t 1 h
1:10
c
Ac
92 87,5
92,4
100
4,5
7,6
46 46
92
7,6
94,8
7,6
4,5
∆→0
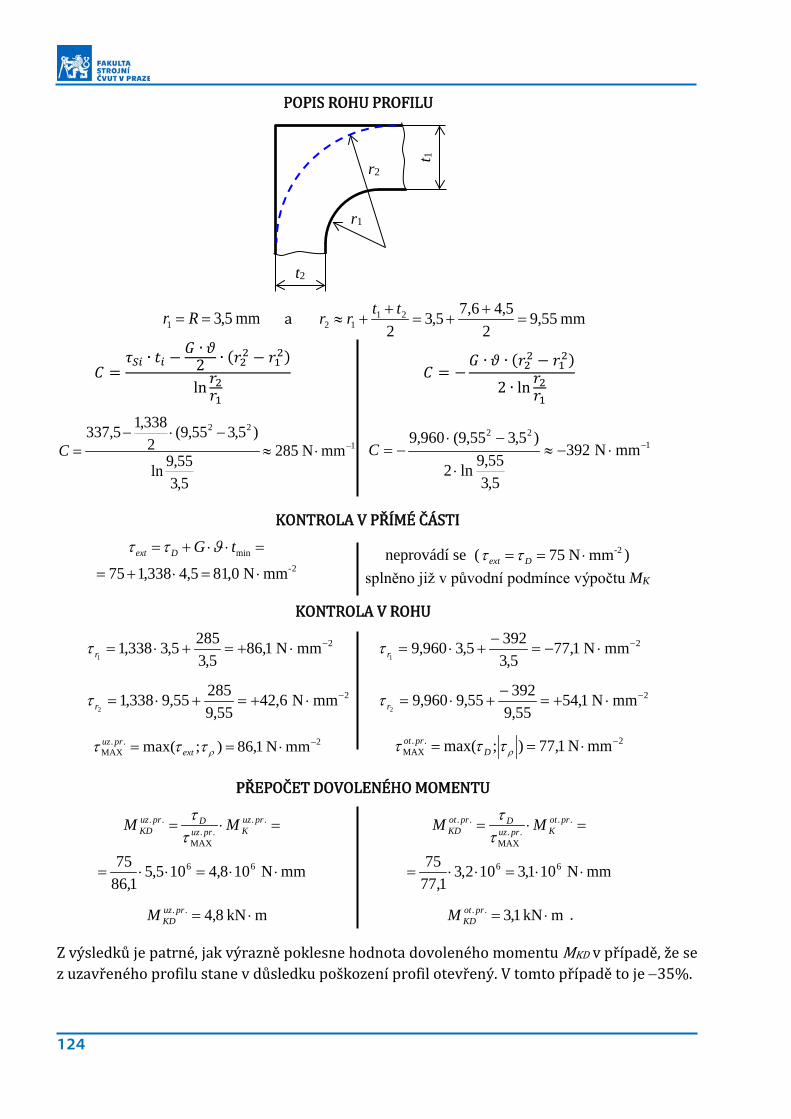
124
POPIS ROHU PROFILU
mm5,31 == Rr a mm55,92
5,46,75,32
2112 =
++=
++≈
ttrr
𝐶𝐶 =𝜏𝜏𝑆𝑆𝑖𝑖 ∙ 𝐾𝐾𝑖𝑖 − 𝐺𝐺 ∙ 𝜗𝜗
2 ∙ (𝑟𝑟22 − 𝑟𝑟1
2)
ln 𝑟𝑟2𝑟𝑟1
𝐶𝐶 = −𝐺𝐺 ∙ 𝜗𝜗 ∙ (𝑟𝑟2
2 − 𝑟𝑟12)
2 ∙ ln 𝑟𝑟2𝑟𝑟1
1
22
mmN285
5,355,9ln
)5,355,9(2338,15,337
−⋅≈−⋅−
=C 122
mmN392
5,355,9ln2
)5,355,9(960,9 −⋅−≈⋅
−⋅−=C
KONTROLA V PŘÍMÉ ČÁSTI
2-min
mmN0,815,4338,175 ⋅=⋅+=
=⋅⋅+= tGDext ϑττ
KONTROLA V ROHU
2mmN1,865,3
2855,3338,11
−⋅+=+⋅=rτ 2mmN1,775,3
3925,3960,91
−⋅−=−
+⋅=rτ
2mmN6,4255,9
28555,9338,12
−⋅+=+⋅=rτ 2mmN1,5455,939255,9960,9
2
−⋅+=−
+⋅=rτ
2..MAX mmN1,86);max( −⋅== ρτττ ext
pruz 2..MAX mmN1,77);max( −⋅== ρτττ D
prot
PŘEPOČET DOVOLENÉHO MOMENTU
mmN108,4105,5
1,8675 66
....
MAX
..
⋅⋅=⋅⋅=
=⋅= pruzKpruz
DpruzKD MM
ττ
mmN101,3102,3
1,7775 66
....
MAX
..
⋅⋅=⋅⋅=
=⋅= protKpruz
DprotKD MM
ττ
mkN8,4.. ⋅=pruzKDM mkN1,3.. ⋅=prot
KDM .
Z výsledků je patrné, jak výrazně poklesne hodnota dovoleného momentu MKD v případě, že se z uzavřeného profilu stane v důsledku poškození profil otevřený. V tomto případě to je −35%.
neprovádí se ( -2mmN75 ⋅== Dext ττ ) splněno již v původní podmínce výpočtu MK
ρ r2
r1
t 1
t2
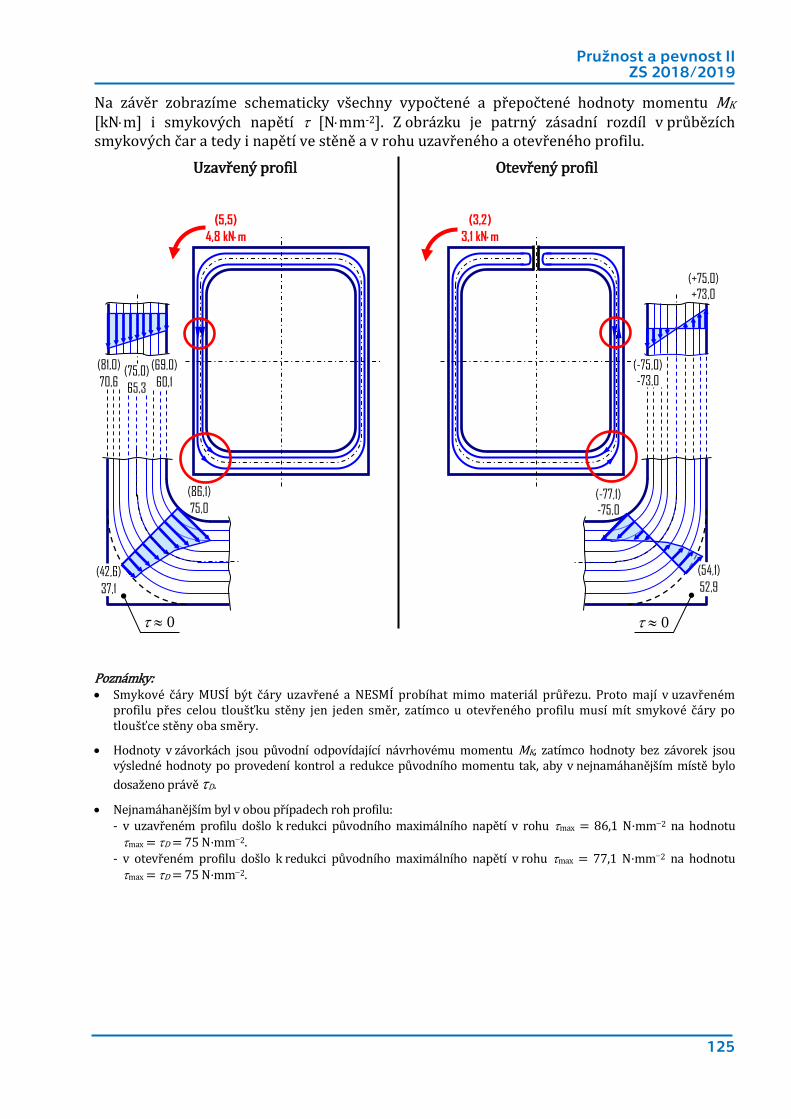
Pružnost a pevnost II ZS 2018/2019
125
Na závěr zobrazíme schematicky všechny vypočtené a přepočtené hodnoty momentu MK [kN⋅m] i smykových napětí τ [N⋅mm-2]. Z obrázku je patrný zásadní rozdíl v průbězích smykových čar a tedy i napětí ve stěně a v rohu uzavřeného a otevřeného profilu.
Uzavřený profil Otevřený profil
Poznámky: • Smykové čáry MUSÍ být čáry uzavřené a NESMÍ probíhat mimo materiál průřezu. Proto mají v uzavřeném
profilu přes celou tloušťku stěny jen jeden směr, zatímco u otevřeného profilu musí mít smykové čáry po tloušťce stěny oba směry.
• Hodnoty v závorkách jsou původní odpovídající návrhovému momentu MK, zatímco hodnoty bez závorek jsou výsledné hodnoty po provedení kontrol a redukce původního momentu tak, aby v nejnamáhanějším místě bylo dosaženo právě τD.
• Nejnamáhanějším byl v obou případech roh profilu: - v uzavřeném profilu došlo k redukci původního maximálního napětí v rohu τmax = 86,1 N·mm−2 na hodnotu
τmax = τD = 75 N·mm−2. - v otevřeném profilu došlo k redukci původního maximálního napětí v rohu τmax = 77,1 N·mm−2 na hodnotu
τmax = τD = 75 N·mm−2.
(5,5) 4,8 kN⋅m
(3,2) 3,1 kN⋅m
(54,1) 52,9
τ ≈ 0
(-77,1) -75,0
(-75,0) -73,0
(+75,0) +73,0
(42,6) 37,1
τ ≈ 0
(86,1) 75,0
(81,0) 70,6
(69,0) 60,1
(75,0) 65,3
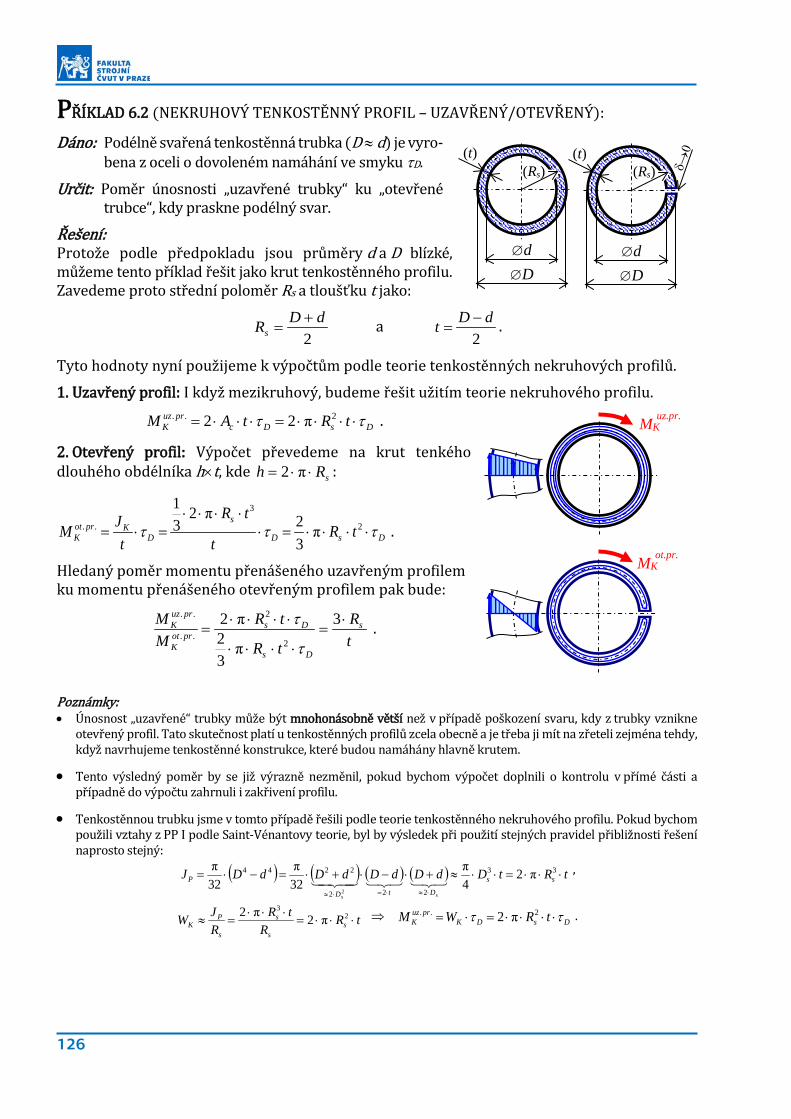
126
PŘÍKLAD 6.2 (NEKRUHOVÝ TENKOSTĚNNÝ PROFIL – UZAVŘENÝ/OTEVŘENÝ):
Dáno: Podélně svařená tenkostěnná trubka (D ≈ d) je vyro- bena z oceli o dovoleném namáhání ve smyku τD.
Určit: Poměr únosnosti „uzavřené trubky“ ku „otevřené trubce“, kdy praskne podélný svar.
Řešení: Protože podle předpokladu jsou průměry d a D blízké, můžeme tento příklad řešit jako krut tenkostěnného profilu. Zavedeme proto střední poloměr Rs a tloušťku t jako:
2dDRs
+= a
2dDt −
= .
Tyto hodnoty nyní použijeme k výpočtům podle teorie tenkostěnných nekruhových profilů.
1. Uzavřený profil: I když mezikruhový, budeme řešit užitím teorie nekruhového profilu.
DsDcpruz
K tRtAM ττ ⋅⋅⋅⋅=⋅⋅⋅= 2.. π22 .
2. Otevřený profil: Výpočet převedeme na krut tenkého dlouhého obdélníka h×t, kde sRh ⋅⋅= π2 :
DsD
s
DKprot
K tRt
tR
tJM τττ ⋅⋅⋅⋅=⋅
⋅⋅⋅⋅=⋅= 2
3
.. π32π2
31
.
Hledaný poměr momentu přenášeného uzavřeným profilem ku momentu přenášeného otevřeným profilem pak bude:
tR
tR
tRMM s
Ds
Dsprot
K
pruzK ⋅
=⋅⋅⋅⋅
⋅⋅⋅⋅=
3
π32
π22
2
..
..
τ
τ .
Poznámky: • Únosnost „uzavřené“ trubky může být mnohonásobně větší než v případě poškození svaru, kdy z trubky vznikne
otevřený profil. Tato skutečnost platí u tenkostěnných profilů zcela obecně a je třeba ji mít na zřeteli zejména tehdy, když navrhujeme tenkostěnné konstrukce, které budou namáhány hlavně krutem.
• Tento výsledný poměr by se již výrazně nezměnil, pokud bychom výpočet doplnili o kontrolu v přímé části a případně do výpočtu zahrnuli i zakřivení profilu.
• Tenkostěnnou trubku jsme v tomto případě řešili podle teorie tenkostěnného nekruhového profilu. Pokud bychom použili vztahy z PP I podle Saint-Vénantovy teorie, byl by výsledek při použití stejných pravidel přibližnosti řešení naprosto stejný:
( ) ( ) ( ) ( ) tRtDdDdDdDdDJ ss
DtD
P
ss
⋅⋅⋅=⋅⋅≈+⋅−⋅+⋅=−⋅=⋅≈⋅=⋅≈
33
222
2244 π24π
32π
32π
2
,
tRR
tRRJW s
s
s
s
PK ⋅⋅⋅=
⋅⋅⋅=≈ 2
3
π2π2 ⇒ DsDKpruz
K tRWM ττ ⋅⋅⋅⋅=⋅= 2.. π2 .
MK uz.pr.
MK ot.pr.
∅d ∅D
∅d ∅D
(Rs) (Rs) (t) (t)
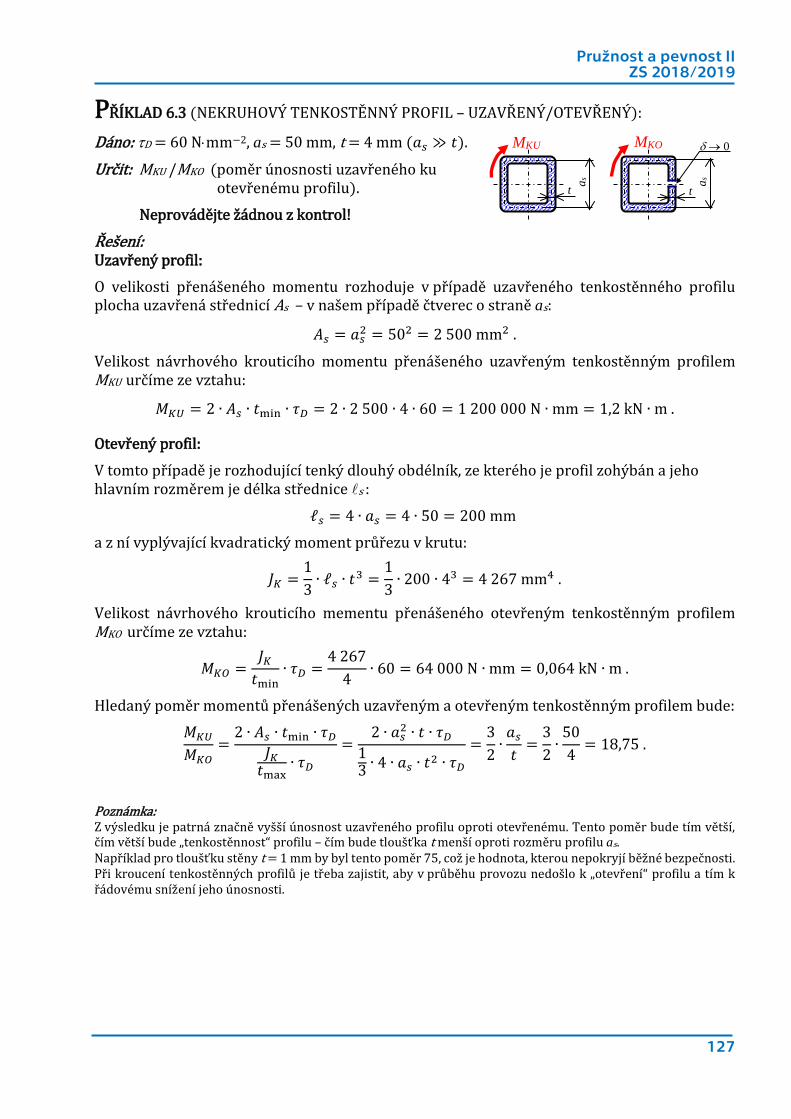
Pružnost a pevnost II ZS 2018/2019
127
PŘÍKLAD 6.3 (NEKRUHOVÝ TENKOSTĚNNÝ PROFIL – UZAVŘENÝ/OTEVŘENÝ):
Dáno: τD = 60 N⋅mm−2, as = 50 mm, t = 4 mm (𝑎𝑎𝑘𝑘 ≫ 𝐾𝐾).
Určit: MKU /MKO (poměr únosnosti uzavřeného ku otevřenému profilu).
Neprovádějte žádnou z kontrol!
Řešení: Uzavřený profil:
O velikosti přenášeného momentu rozhoduje v případě uzavřeného tenkostěnného profilu plocha uzavřená střednicí As – v našem případě čtverec o straně as:
𝐴𝐴𝑘𝑘 = 𝑎𝑎𝑘𝑘2 = 502 = 2 500 mm2 .
Velikost návrhového krouticího momentu přenášeného uzavřeným tenkostěnným profilem MKU určíme ze vztahu:
𝑀𝑀𝐾𝐾𝑈𝑈 = 2 ∙ 𝐴𝐴𝑘𝑘 ∙ 𝐾𝐾min ∙ 𝜏𝜏𝐷𝐷 = 2 ∙ 2 500 ∙ 4 ∙ 60 = 1 200 000 N ∙ mm = 1,2 kN ∙ m .
Otevřený profil:
V tomto případě je rozhodující tenký dlouhý obdélník, ze kterého je profil zohýbán a jeho hlavním rozměrem je délka střednice s :
ℓ𝑘𝑘 = 4 ∙ 𝑎𝑎𝑘𝑘 = 4 ∙ 50 = 200 mm
a z ní vyplývající kvadratický moment průřezu v krutu:
𝐽𝐽𝐾𝐾 =13
∙ ℓ𝑘𝑘 ∙ 𝐾𝐾3 =13
∙ 200 ∙ 43 = 4 267 mm4 .
Velikost návrhového krouticího mementu přenášeného otevřeným tenkostěnným profilem MKO určíme ze vztahu:
𝑀𝑀𝐾𝐾𝑂𝑂 =𝐽𝐽𝐾𝐾
𝐾𝐾min∙ 𝜏𝜏𝐷𝐷 =
4 2674
∙ 60 = 64 000 N ∙ mm = 0,064 kN ∙ m .
Hledaný poměr momentů přenášených uzavřeným a otevřeným tenkostěnným profilem bude: 𝑀𝑀𝐾𝐾𝑈𝑈
𝑀𝑀𝐾𝐾𝑂𝑂=
2 ∙ 𝐴𝐴𝑘𝑘 ∙ 𝐾𝐾min ∙ 𝜏𝜏𝐷𝐷𝐽𝐽𝐾𝐾
𝐾𝐾max∙ 𝜏𝜏𝐷𝐷
=2 ∙ 𝑎𝑎𝑘𝑘
2 ∙ 𝐾𝐾 ∙ 𝜏𝜏𝐷𝐷13 ∙ 4 ∙ 𝑎𝑎𝑘𝑘 ∙ 𝐾𝐾2 ∙ 𝜏𝜏𝐷𝐷
=32
∙𝑎𝑎𝑘𝑘
𝐾𝐾=
32
∙504
= 18,75 .
Poznámka: Z výsledku je patrná značně vyšší únosnost uzavřeného profilu oproti otevřenému. Tento poměr bude tím větší, čím větší bude „tenkostěnnost“ profilu – čím bude tloušťka t menší oproti rozměru profilu as. Například pro tloušťku stěny t = 1 mm by byl tento poměr 75, což je hodnota, kterou nepokryjí běžné bezpečnosti. Při kroucení tenkostěnných profilů je třeba zajistit, aby v průběhu provozu nedošlo k „otevření“ profilu a tím k řádovému snížení jeho únosnosti.
a s
t
MKU
a s
MKO
t
δ → 0

128
PŘÍKLAD 6.4 (NEKRUHOVÝ TENKOSTĚNNÝ PROFIL – UZAVŘENÝ):
Dáno: Prut je vyroben z tenkostěnného šestihranného profilu a je namáhán krouticím momentem MK (rozměry jsou patrné z obrázku a všechny jsou funkcí velikosti a).
Určit: MKD (dovolený krouticí moment při zohlednění kon-centrace v rohu a rozložení napětí v přímé části).
Řešení: Prut je tvořen pravidelným tenkostěnným šestihranným profilem, který můžeme rozdělit celkem na 6 rovnostranných trojúhelníků o straně a.
Je-li základna zadaná a, musí platit z Pythagorovy věty:
𝑣𝑣 = �𝑎𝑎2 − �𝑎𝑎2
�2
=√32
∙ 𝑎𝑎
a obsah jednoho trojúhelníku bude:
𝐴𝐴1 ▲ =12
∙ 𝑎𝑎 ∙ 𝑣𝑣 =√34
∙ 𝑎𝑎2 .
Celková plocha střednice tenkostěnného šestihranného profilu je:
𝐴𝐴𝑘𝑘 = 6 ∙ 𝐴𝐴1 ▲ = 6 ∙√34
∙ 𝑎𝑎 =32
∙ √3 ∙ 𝑎𝑎2 .
Návrhový krouticí moment, který přenese tenkostěnný šestihranný profil je:
𝑀𝑀𝐾𝐾 = 2 ∙ 𝐴𝐴𝑘𝑘 ∙ 𝐾𝐾min ∙ 𝜏𝜏𝐷𝐷 = 2 ∙32
∙ √3 ∙ 𝑎𝑎2 ∙𝑎𝑎8
∙ 𝜏𝜏𝐷𝐷 =3 ∙ √3
8∙ 𝑎𝑎3 ∙ 𝜏𝜏𝐷𝐷 .
Nyní musíme provést obě kontroly, a to jak kontrolu v přímé části, tak i kontrolu v rohu, kde dochází ke koncentraci napětí. Na základě těchto kontrol pak stanovíme výsledný dovolený moment, který je řešený profil schopný přenést.
KONTROLA V PŘÍMÉ ČÁSTI:
𝐺𝐺 ∙ 𝜗𝜗 =∫ 𝜏𝜏𝑘𝑘 ∙ 𝑑𝑑𝑑𝑑
(𝑘𝑘)
2 ∙ 𝐴𝐴𝑘𝑘=
6 ∙ 𝜏𝜏𝐷𝐷 ∙ 𝑎𝑎
2 ∙ 32 ∙ √3 ∙ 𝑎𝑎2
=2 ∙ 𝜏𝜏𝐷𝐷
√3 ∙ 𝑎𝑎 .
Smykové napětí na vnitřní (i) a na vnější (e) straně přímé části vypočteme ze vztahů:
𝜏𝜏𝑖𝑖 = 𝜏𝜏𝑘𝑘 − 𝐺𝐺 ∙ 𝜗𝜗 ∙ 𝐾𝐾 = 𝜏𝜏𝐷𝐷 −2 ∙ 𝜏𝜏𝐷𝐷
√3 ∙ 𝑎𝑎∙
𝑎𝑎8
= �1 −2
8 ∙ √3� ∙ 𝜏𝜏𝐷𝐷 = 0,856 ∙ 𝜏𝜏𝐷𝐷 .
𝜏𝜏𝑐𝑐 = 𝜏𝜏𝑘𝑘 + 𝐺𝐺 ∙ 𝜗𝜗 ∙ 𝐾𝐾 = 𝜏𝜏𝐷𝐷 +2 ∙ 𝜏𝜏𝐷𝐷
√3 ∙ 𝑎𝑎∙
𝑎𝑎8
= �1 +2
8 ∙ √3� ∙ 𝜏𝜏𝐷𝐷 = 1,177 ∙ 𝜏𝜏𝐷𝐷 .
Z výsledků je vidět, že napětí na vnější (e) straně stěny musí být vždy větší než střední (s) napětí (v tomto případě bylo uvažováno 𝜏𝜏𝑘𝑘 = 𝜏𝜏𝐷𝐷).
s
a
a/2 a/2
v

Pružnost a pevnost II ZS 2018/2019
129
KONTORLA V ROHU:
U tohoto profilu jsou všechny rohy stejné, a tak stačí popsat geometrii jednoho z rohů pomocí dvou poloměrů křivosti:
𝑟𝑟1 = 𝜌𝜌 =1
12∙ 𝑎𝑎 ,
𝑟𝑟2 = 𝜌𝜌 + 𝐾𝐾 =1
12∙ 𝑎𝑎 +
18
∙ 𝑎𝑎 =5
24∙ 𝑎𝑎
Integrační konstanta C bude mít velikost:
𝐶𝐶 =𝜏𝜏𝑘𝑘 ∙ 𝐾𝐾 − 𝐺𝐺 ∙ 𝜗𝜗
2 ∙ (𝑟𝑟22 − 𝑟𝑟1
2)
ln 𝑟𝑟2𝑟𝑟1
.
Po dosazení zadaných a vypočtených hodnot bude:
𝐶𝐶 =𝜏𝜏𝐷𝐷 ∙ 𝑎𝑎
8 −
2 ∙ 𝜏𝜏𝐷𝐷√3 ∙ 𝑎𝑎
2 ∙ �� 524 ∙ 𝑎𝑎�
2− � 2
24 ∙ 𝑎𝑎�2
�
ln5
24 ∙ 𝑎𝑎1
12 ∙ 𝑎𝑎
=𝜏𝜏𝐷𝐷 ∙ 𝑎𝑎 ∙ �1
8 − 42√3 ∙ 1152
�
ln 52
= 0,113 ∙ 𝜏𝜏𝐷𝐷 ∙ 𝑎𝑎 .
Nyní vyjádříme smykové napětí, které vznikne v důsledku koncentrace na poloměru r1:
𝜏𝜏𝑜𝑜1 = 𝐺𝐺 ∙ 𝜗𝜗 ∙ 𝑟𝑟1 +𝐶𝐶𝑟𝑟1
=𝜏𝜏𝐷𝐷
√3 ∙ 𝑎𝑎∙
112
∙ 𝑎𝑎 +0,113 ∙ 𝜏𝜏𝐷𝐷 ∙ 𝑎𝑎
112 ∙ 𝑎𝑎
= 1,404 ∙ 𝜏𝜏𝐷𝐷 .
Z vypočtených hodnot je patrné, že nejnamáhanějším místem krouceného tenkostěnného šestihranného profilu je vnitřní poloměr rohu:
𝜏𝜏max = 𝑚𝑚𝑎𝑎𝑚𝑚�𝜏𝜏𝑐𝑐 ; 𝜏𝜏𝑜𝑜1� = 𝜏𝜏𝑜𝑜1 = 1,404 ∙ 𝜏𝜏𝐷𝐷 .
Abychom toto napětí snížili a dosáhli právě dovolené hodnoty v nejnamáhanějším místě, musíme původní návrhový moment redukovat podílem dovoleného napětí ku maximálnímu napětí:
𝑀𝑀𝐾𝐾𝐷𝐷 = 𝑀𝑀𝐾𝐾 ∙𝜏𝜏𝐷𝐷
𝜏𝜏max= 𝑀𝑀𝐾𝐾 ∙
𝜏𝜏𝐷𝐷
1,404 ∙ 𝜏𝜏𝐷𝐷=
𝑀𝑀𝐾𝐾
1,404=
3 ∙ √38 ∙ 𝑎𝑎3 ∙ 𝜏𝜏𝐷𝐷
1,404≈ 0,463 ∙ 𝑎𝑎3 ∙ 𝜏𝜏𝐷𝐷 .
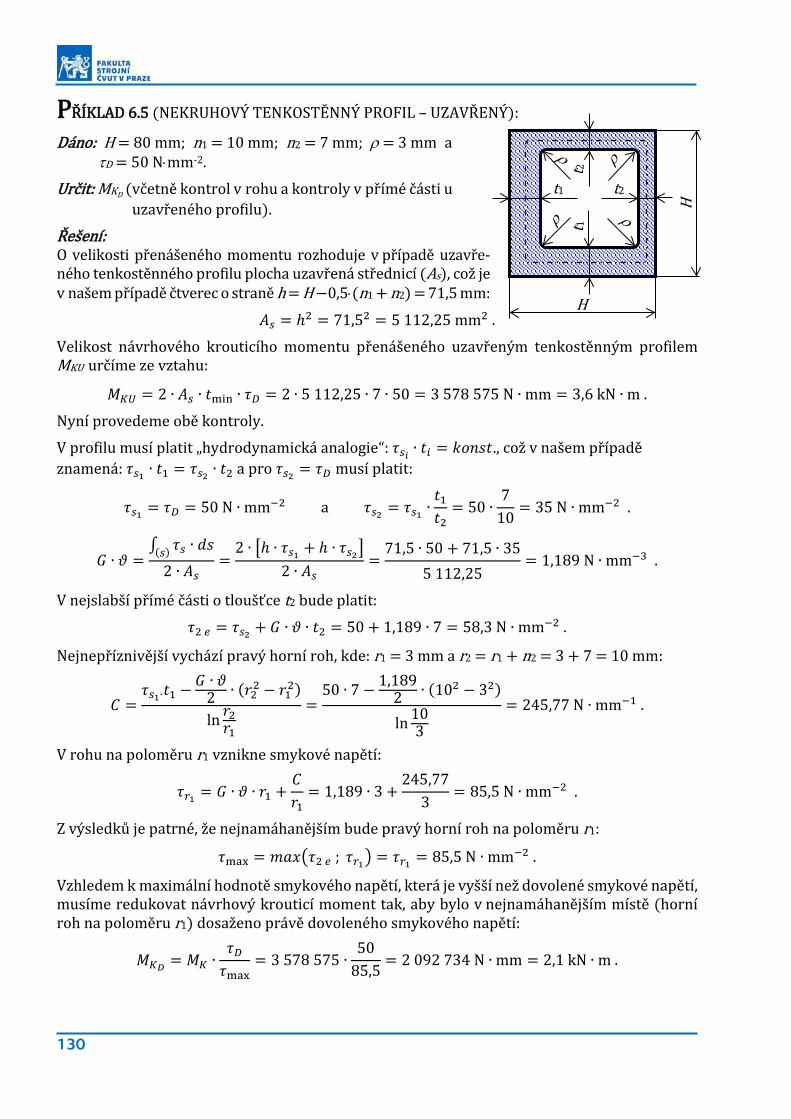
130
PŘÍKLAD 6.5 (NEKRUHOVÝ TENKOSTĚNNÝ PROFIL – UZAVŘENÝ):
Dáno: H = 80 mm; n1 = 10 mm; n2 = 7 mm; ρ = 3 mm a τD = 50 N⋅mm-2.
Určit: MKD (včetně kontrol v rohu a kontroly v přímé části u uzavřeného profilu).
Řešení: O velikosti přenášeného momentu rozhoduje v případě uzavře-ného tenkostěnného profilu plocha uzavřená střednicí (As), což je v našem případě čtverec o straně h = H −0,5⋅(n1 + n2) = 71,5 mm:
𝐴𝐴𝑘𝑘 = ℎ2 = 71,52 = 5 112,25 mm2 .
Velikost návrhového krouticího momentu přenášeného uzavřeným tenkostěnným profilem MKU určíme ze vztahu:
𝑀𝑀𝐾𝐾𝑈𝑈 = 2 ∙ 𝐴𝐴𝑘𝑘 ∙ 𝐾𝐾min ∙ 𝜏𝜏𝐷𝐷 = 2 ∙ 5 112,25 ∙ 7 ∙ 50 = 3 578 575 N ∙ mm = 3,6 kN ∙ m .
Nyní provedeme obě kontroly.
V profilu musí platit „hydrodynamická analogie“: 𝜏𝜏𝑘𝑘𝑖𝑖 ∙ 𝐾𝐾𝑖𝑖 = 𝑘𝑘𝑘𝑘𝑚𝑚𝑑𝑑𝐾𝐾., což v našem případě znamená: 𝜏𝜏𝑘𝑘1 ∙ 𝐾𝐾1 = 𝜏𝜏𝑘𝑘2 ∙ 𝐾𝐾2 a pro 𝜏𝜏𝑘𝑘2 = 𝜏𝜏𝐷𝐷 musí platit:
𝜏𝜏𝑘𝑘1 = 𝜏𝜏𝐷𝐷 = 50 N ∙ mm−2 a 𝜏𝜏𝑘𝑘2 = 𝜏𝜏𝑘𝑘1 ∙𝐾𝐾1
𝐾𝐾2= 50 ∙
710
= 35 N ∙ mm−2 .
𝐺𝐺 ∙ 𝜗𝜗 =∫ 𝜏𝜏𝑘𝑘 ∙ 𝑑𝑑𝑑𝑑
(𝑘𝑘)
2 ∙ 𝐴𝐴𝑘𝑘=
2 ∙ �ℎ ∙ 𝜏𝜏𝑘𝑘1 + ℎ ∙ 𝜏𝜏𝑘𝑘2�2 ∙ 𝐴𝐴𝑘𝑘
=71,5 ∙ 50 + 71,5 ∙ 35
5 112,25= 1,189 N ∙ mm−3 .
V nejslabší přímé části o tloušťce t2 bude platit:
𝜏𝜏2 𝑐𝑐 = 𝜏𝜏𝑘𝑘2 + 𝐺𝐺 ∙ 𝜗𝜗 ∙ 𝐾𝐾2 = 50 + 1,189 ∙ 7 = 58,3 N ∙ mm−2 .
Nejnepříznivější vychází pravý horní roh, kde: r1 = 3 mm a r2 = r1 + n2 = 3 + 7 = 10 mm:
𝐶𝐶 =𝜏𝜏𝑘𝑘1∙𝐾𝐾1 − 𝐺𝐺 ∙ 𝜗𝜗
2 ∙ (𝑟𝑟22 − 𝑟𝑟1
2)
ln 𝑟𝑟2𝑟𝑟1
=50 ∙ 7 − 1,189
2 ∙ (102 − 32)
ln 103
= 245,77 N ∙ mm−1 .
V rohu na poloměru r1 vznikne smykové napětí:
𝜏𝜏𝑜𝑜1 = 𝐺𝐺 ∙ 𝜗𝜗 ∙ 𝑟𝑟1 +𝐶𝐶𝑟𝑟1
= 1,189 ∙ 3 +245,77
3= 85,5 N ∙ mm−2 .
Z výsledků je patrné, že nejnamáhanějším bude pravý horní roh na poloměru r1:
𝜏𝜏max = 𝑚𝑚𝑎𝑎𝑚𝑚�𝜏𝜏2 𝑐𝑐 ; 𝜏𝜏𝑜𝑜1� = 𝜏𝜏𝑜𝑜1 = 85,5 N ∙ mm−2 .
Vzhledem k maximální hodnotě smykového napětí, která je vyšší než dovolené smykové napětí, musíme redukovat návrhový krouticí moment tak, aby bylo v nejnamáhanějším místě (horní roh na poloměru r1) dosaženo právě dovoleného smykového napětí:
𝑀𝑀𝐾𝐾𝐷𝐷 = 𝑀𝑀𝐾𝐾 ∙𝜏𝜏𝐷𝐷
𝜏𝜏max= 3 578 575 ∙
5085,5
= 2 092 734 N ∙ mm = 2,1 kN ∙ m .
H
H
t 1
t 2
t1 t2

Pružnost a pevnost II ZS 2018/2019
131
PŘÍKLAD 6.6 (NEKRUHOVÝ TENKOSTĚNNÝ PROFIL – UZAVŘENÝ):
Dáno: t a τD .
Určit: MKD = f(t ; τD) (dovolený moment jako funkci zadaných veličin včetně kon- trol v přímé části a v levém dolním rohu).
Řešení: Pro další použití vypočteme nejprve délku třetí strany c pravoúhlého trojúhelníku:
𝑐𝑐 = �𝑎𝑎2 + 𝑏𝑏2 = �(20 ∙ 𝐾𝐾)2 + (10 ∙ 𝐾𝐾)2 ≈ 22,4 ∙ 𝐾𝐾. Dále vypočteme velikost plochy uzavřené střednicí:
𝐴𝐴𝑘𝑘 =12
∙ 𝑎𝑎 ∙ 𝑏𝑏 =12
∙ 20 ∙ 𝐾𝐾 ∙ 10 ∙ 𝐾𝐾 = 100 ∙ 𝐾𝐾2.
Nyní již vypočteme návrhový krouticí moment podle vztahu: 𝑀𝑀𝐾𝐾 = 2 ∙ 𝐴𝐴𝑘𝑘 ∙ 𝐾𝐾𝑚𝑚𝑖𝑖𝑑𝑑 ∙ 𝜏𝜏𝐷𝐷 = 2 ∙ 100 ∙ 𝐾𝐾2 ∙ 𝐾𝐾 ∙ 𝜏𝜏𝐷𝐷 = 200 ∙ 𝐾𝐾3 ∙ 𝜏𝜏𝐷𝐷 .
Pro následné kontroly musíme stanovit 𝐺𝐺 ∙ 𝜗𝜗 (protože t = konst., musí být všude τs = τD:
𝐺𝐺 ∙ 𝜗𝜗 =∫ 𝜏𝜏𝑘𝑘 ∙ 𝑑𝑑𝑑𝑑
(𝑘𝑘)
2 ∙ 𝐴𝐴𝑘𝑘=
𝜏𝜏𝐷𝐷 ∙ (𝑎𝑎 + 𝑏𝑏 + 𝑐𝑐)2 ∙ 100 ∙ 𝐾𝐾2 =
𝜏𝜏𝐷𝐷 ∙ (20 + 10 + 22,4) ∙ 𝐾𝐾200 ∙ 𝐾𝐾2 =
52,4200
∙𝜏𝜏𝐷𝐷
𝐾𝐾≈ 0,262 ∙
𝜏𝜏𝐷𝐷
𝐾𝐾 .
Dále pro kontrolu v levém dolním rohu musíme popsat jeho geometrii a stanovit konstantu C: 𝑟𝑟1 = 𝜌𝜌 = 0,4 ∙ 𝐾𝐾 a 𝑟𝑟2 = 𝑟𝑟1 + 𝐾𝐾 = 0,4 ∙ 𝐾𝐾 + 𝐾𝐾 = 1,4 ∙ 𝐾𝐾 .
Pro tyto hodnoty vychází:
𝐶𝐶 =𝜏𝜏𝐷𝐷 ∙ 𝐾𝐾 − 𝐺𝐺 ∙ 𝜗𝜗
2 ∙ (𝑟𝑟22 − 𝑟𝑟1
2)
ln �𝑟𝑟2𝑟𝑟1
�=
𝜏𝜏𝐷𝐷 ∙ 𝐾𝐾 −0,262 ∙ 𝜏𝜏𝐷𝐷
𝐾𝐾2 ∙ [(1,4 ∙ 𝐾𝐾)2 − (0,4 ∙ 𝐾𝐾)2]
ln �1,4 ∙ 𝐾𝐾0,4 ∙ 𝐾𝐾�
≈ 0,61 ∙ 𝜏𝜏𝐷𝐷 ∙ 𝐾𝐾 .
Nejprve vypočteme (zkontrolujeme) přímou část profilu:
𝜏𝜏𝑐𝑐/𝑖𝑖 = 𝜏𝜏𝑘𝑘 ± 𝐺𝐺 ∙ 𝜗𝜗 ∙ 𝐾𝐾 = 𝜏𝜏𝐷𝐷 ± 0,262 ∙𝜏𝜏𝐷𝐷
𝐾𝐾∙ 𝐾𝐾 ⟹ �
𝜏𝜏𝑐𝑐 = 𝜏𝜏𝐷𝐷 + 0,262 ∙ 𝜏𝜏𝐷𝐷 = 1,262 ∙ 𝜏𝜏𝐷𝐷
𝜏𝜏𝑖𝑖 = 𝜏𝜏𝐷𝐷 − 0,262 ∙ 𝜏𝜏𝐷𝐷 = 0,738 ∙ 𝜏𝜏𝐷𝐷
.
Dále zkontrolujeme napětí v rohu profilu:
𝜏𝜏𝑜𝑜1;𝑜𝑜2 = 𝐺𝐺 ∙ 𝜗𝜗 ∙ 𝑟𝑟1;2 +𝐶𝐶
𝑟𝑟1;2 ⟹
⎩⎪⎨
⎪⎧ 𝜏𝜏𝑜𝑜1 = 0,262 ∙
𝜏𝜏𝐷𝐷
𝐾𝐾 ∙ 0,4 ∙ 𝐾𝐾 +
0,61 ∙ 𝜏𝜏𝐷𝐷 ∙ 𝐾𝐾0,4 ∙ 𝐾𝐾
= 1,630 ∙ 𝜏𝜏𝐷𝐷
𝜏𝜏𝑜𝑜2 = 0,262 ∙𝜏𝜏𝐷𝐷
𝐾𝐾 ∙ 1,4 ∙ 𝐾𝐾 +
0,61 ∙ 𝜏𝜏𝐷𝐷 ∙ 𝐾𝐾1,4 ∙ 𝐾𝐾
= 0,803 ∙ 𝜏𝜏𝐷𝐷
.
Maximální smykové napětí vzniká v levém dolním rohu na vnitřním poloměru: 𝜏𝜏𝑚𝑚𝑚𝑚𝑚𝑚 = max�𝜏𝜏𝑐𝑐; 𝜏𝜏𝑜𝑜1� = 𝜏𝜏𝑜𝑜1 = 1,630 ∙ 𝜏𝜏𝐷𝐷 .
Dovolený moment dostaneme „redukcí“ návrhového tak, aby v nejnamáhanějším místě (v rohu poloměr r1) bylo dosaženo právě dovoleného smykového napětí:
𝑀𝑀𝐾𝐾𝐷𝐷 = 𝑀𝑀𝐾𝐾 ∙𝜏𝜏𝐷𝐷
𝜏𝜏𝑚𝑚𝑚𝑚𝑚𝑚= 200 ∙ 𝐾𝐾3 ∙ 𝜏𝜏𝐷𝐷 ∙
𝜏𝜏𝐷𝐷
1,630 ∙ 𝜏𝜏𝐷𝐷=
2001,630
∙ 𝐾𝐾3 ∙ 𝜏𝜏𝐷𝐷 ≈ 122,7 ∙ 𝐾𝐾3 ∙ 𝜏𝜏𝐷𝐷 .
a = 20⋅t
b =
10⋅
t
ρ = 0,4⋅t
t
t

132
PŘÍKLAD 6.7 (NEKRUHOVÝ TENKOSTĚNNÝ PROFIL – UZAVŘENÝ):
Dáno: t a τD .
Určit: MKD = f(t ; τD) (dovolený moment jako funkci zadaných veličin včetně kontrol v přímé části a v rohu).
Řešení: Nejprve vypočteme velikost plochy uzavřené střednicí:
𝐴𝐴𝑘𝑘 =12
∙ 𝜋𝜋 ∙ 𝑟𝑟2 =12
∙ 𝜋𝜋 ∙ (10 ∙ 𝐾𝐾)2 = 50 ∙ 𝜋𝜋 ∙ 𝐾𝐾2 ≈ 157,1 ∙ 𝐾𝐾2.
Nyní již vypočteme návrhový krouticí moment podle vztahu:
𝑀𝑀𝐾𝐾 = 2 ∙ 𝐴𝐴𝑘𝑘 ∙ 𝐾𝐾𝑚𝑚𝑖𝑖𝑑𝑑 ∙ 𝜏𝜏𝐷𝐷 = 2 ∙ 50 ∙ 𝜋𝜋 ∙ 𝐾𝐾2 ∙ 𝐾𝐾 ∙ 𝜏𝜏𝐷𝐷 = 100 ∙ 𝜋𝜋 ∙ 𝐾𝐾3 ∙ 𝜏𝜏𝐷𝐷 ≈ 314,2 ∙ 𝐾𝐾3 ∙ 𝜏𝜏𝐷𝐷 .
Pro následné kontroly musíme stanovit 𝐺𝐺 ∙ 𝜗𝜗 (protože t1 = t a t2 = 2⋅t , bude v přímé dolní části (1) střední napětí τs1 = τD a v horní zakřivené částí (2) střední napětí τs2 = τD/2):
𝐺𝐺 ∙ 𝜗𝜗 =∫ 𝜏𝜏𝑘𝑘 ∙ 𝑑𝑑𝑑𝑑
(𝑘𝑘)
2 ∙ 𝐴𝐴𝑘𝑘=
𝜏𝜏𝐷𝐷 ∙ 2 ∙ 𝑟𝑟 + 𝜏𝜏𝐷𝐷2 ∙ 𝜋𝜋 ∙ 𝑟𝑟
2 ∙ 50 ∙ 𝜋𝜋 ∙ 𝐾𝐾2 =𝜏𝜏𝐷𝐷 ∙ �20 + 𝜋𝜋
2 ∙ 10� ∙ 𝐾𝐾100 ∙ 𝜋𝜋 ∙ 𝐾𝐾2 =
35,7314,2
∙𝜏𝜏𝐷𝐷
𝐾𝐾≈ 0,114 ∙
𝜏𝜏𝐷𝐷
𝐾𝐾 .
Dále pro kontrolu v levém dolním rohu musíme popsat jeho geometrii pomocí poloměrů 𝑟𝑟1 a 𝑟𝑟2 a stanovit konstantu C:
𝑟𝑟1 = 𝜌𝜌 = 0,2 ∙ 𝐾𝐾 ; 𝑟𝑟2 = 𝑟𝑟1 +𝐾𝐾1 + 𝐾𝐾2
2= 0,2 ∙ 𝐾𝐾 +
𝐾𝐾 + 2 ∙ 𝐾𝐾2
= 1,7 ∙ 𝐾𝐾 .
Pro tyto hodnoty vychází:
𝐶𝐶 =𝜏𝜏𝐷𝐷 ∙ 𝐾𝐾 − 𝐺𝐺 ∙ 𝜗𝜗
2 ∙ (𝑟𝑟22 − 𝑟𝑟1
2)
ln �𝑟𝑟2𝑟𝑟1
�=
𝜏𝜏𝐷𝐷 ∙ 𝐾𝐾 −0,114 ∙ 𝜏𝜏𝐷𝐷
𝐾𝐾2 ∙ [(1,7 ∙ 𝐾𝐾)2 − (0,2 ∙ 𝐾𝐾)2]
ln �1,7 ∙ 𝐾𝐾0,2 ∙ 𝐾𝐾�
≈ 0,39 ∙ 𝜏𝜏𝐷𝐷 ∙ 𝐾𝐾 .
Nejprve vypočteme (zkontrolujeme) přímou část profilu:
𝜏𝜏𝑐𝑐/𝑖𝑖 = 𝜏𝜏𝑘𝑘 ± 𝐺𝐺 ∙ 𝜗𝜗 ∙ 𝐾𝐾 = 𝜏𝜏𝐷𝐷 ± 0,114 ∙𝜏𝜏𝐷𝐷
𝐾𝐾∙ 𝐾𝐾 ⟹ �
𝜏𝜏𝑐𝑐 = 𝜏𝜏𝐷𝐷 + 0,114 ∙ 𝜏𝜏𝐷𝐷 = 1,114 ∙ 𝜏𝜏𝐷𝐷
𝜏𝜏𝑖𝑖 = 𝜏𝜏𝐷𝐷 − 0,114 ∙ 𝜏𝜏𝐷𝐷 = 0,886 ∙ 𝜏𝜏𝐷𝐷
.
Dále zkontrolujeme napětí v rohu profilu:
𝜏𝜏𝑜𝑜1;𝑜𝑜2 = 𝐺𝐺 ∙ 𝜗𝜗 ∙ 𝑟𝑟1;2 +𝐶𝐶
𝑟𝑟1;2 ⟹
⎩⎪⎨
⎪⎧ 𝜏𝜏𝑜𝑜1 = 0,114 ∙
𝜏𝜏𝐷𝐷
𝐾𝐾 ∙ 0,2 ∙ 𝐾𝐾 +
0,39 ∙ 𝜏𝜏𝐷𝐷 ∙ 𝐾𝐾0,2 ∙ 𝐾𝐾
= 1,973 ∙ 𝜏𝜏𝐷𝐷
𝜏𝜏𝑜𝑜2 = 0,114 ∙𝜏𝜏𝐷𝐷
𝐾𝐾 ∙ 1,7 ∙ 𝐾𝐾 +
0,39 ∙ 𝜏𝜏𝐷𝐷 ∙ 𝐾𝐾1,7 ∙ 𝐾𝐾
= 0,423 ∙ 𝜏𝜏𝐷𝐷
.
Maximální smykové napětí vzniká v levém dolním rohu na vnitřním poloměru:
𝜏𝜏𝑚𝑚𝑚𝑚𝑚𝑚 = max�𝜏𝜏𝑐𝑐; 𝜏𝜏𝑜𝑜1� = 𝜏𝜏𝑜𝑜1 = 1,973 ∙ 𝜏𝜏𝐷𝐷 .
Dovolený moment dostaneme „redukcí“ návrhového tak, aby v nejnamáhanějším místě (v rohu poloměr r1) bylo dosaženo právě dovoleného smykového napětí:
𝑀𝑀𝐾𝐾𝐷𝐷 = 𝑀𝑀𝐾𝐾 ∙𝜏𝜏𝐷𝐷
𝜏𝜏𝑚𝑚𝑚𝑚𝑚𝑚= 100 ∙ 𝜋𝜋 ∙ 𝐾𝐾3 ∙ 𝜏𝜏𝐷𝐷 ∙
𝜏𝜏𝐷𝐷
1,973 ∙ 𝜏𝜏𝐷𝐷=
100 ∙ 𝜋𝜋1,973
∙ 𝐾𝐾3 ∙ 𝜏𝜏𝐷𝐷 ≈ 159,2 ∙ 𝐾𝐾3 ∙ 𝜏𝜏𝐷𝐷 .
t ρ = 0,2⋅t
(1)
(2)
ρ r2 r1
2⋅t
t
Pružnost a pevnost II ZS 2018/2019
133
PŘÍKLAD 6.8 (NEKRUHOVÝ TENKOSTĚNNÝ PROFIL – OTEVŘENÝ):
Dáno: Prut je tvořen tenkostěnným profilem dle obrázku. H = 120 mm, t1 = 10 mm, t2 = 7 mm, ρ = 3 mm a τD = 50 N·mm−2.
Určit: MKD (dovolený krouticí moment při zohlednění možné koncentrace v rozích profilu).
Řešení: Pro určení kvadratického momentu existuje několik způsobů, jak řešený profil rozdělit na soustavu tenkých dlouhých obdélníků. Ukážeme si dva možné způsoby, z nichž bude patrné, že způsob dělení ovlivní výpočty v řádu jednotek procent.
I. dělení je patrné ze schématického obrázku a kvadratický moment bude:
𝐽𝐽𝐾𝐾𝑐𝑐 I = 𝐽𝐽𝐾𝐾1 I + 𝐽𝐽𝐾𝐾2 I + 𝐽𝐽𝐾𝐾3 I =13
∙ (𝐻𝐻 − 𝐾𝐾1) ∙ 𝐾𝐾13 +
13
∙ 𝐻𝐻 ∙ 𝐾𝐾13 +
13
∙ (𝐻𝐻 − 𝐾𝐾1) ∙ 𝐾𝐾23 =
=13
∙ [(120 − 10) ∙ 103 + 120 ∙ 103 + (120 − 10) ∙ 73] ≈ 89 243 mm4 . II. dělení je patrné ze schématického obrázku a kvadratický moment bude:
𝐽𝐽𝐾𝐾𝑐𝑐 II = 𝐽𝐽𝐾𝐾1 II + 𝐽𝐽𝐾𝐾2 II + 𝐽𝐽𝐾𝐾3 II =13
∙ 𝐻𝐻 ∙ 𝐾𝐾13 +
13
∙ (𝐻𝐻 − 𝐾𝐾1 − 𝐾𝐾2) ∙ 𝐾𝐾13 +
13
∙ 𝐻𝐻 ∙ 𝐾𝐾23 =
=13
∙ [120 ∙ 103 + (120 − 10 − 7) ∙ 103 + 120 ∙ 73] ≈ 88 053 mm4 .
Rozdíl cca 1,4%, což je zanedbatelná chyba.
Pro tyto kvadratické momenty průřezu stanovíme návrhový krouticí moment.
V případě I. dělení bude:
𝑀𝑀𝐾𝐾 I =𝐽𝐽𝐾𝐾𝑐𝑐 I
𝐾𝐾max∙ 𝜏𝜏𝐷𝐷 =
89 24310
∙ 50 = 446 215 N ∙ mm
V případě II. dělení bude:
𝑀𝑀𝐾𝐾 II =𝐽𝐽𝐾𝐾𝑐𝑐 II
𝐾𝐾max∙ 𝜏𝜏𝐷𝐷 =
88 05310
∙ 50 = 440 265 N ∙ mm .
U profilu (otevřeného) je třeba provést pouze kontrolu v rohu. Kontrolu v přímé části není třeba provádět – podmínka, že největší smykové napětí v přímé části je rovno dovolenému smykovému napětíje splněna automaticky z návrhového vztahu.
Pro tenkostěnný otevřený profil platí:
𝐺𝐺 ∙ 𝜗𝜗 =𝑀𝑀𝐾𝐾
𝐽𝐽𝐾𝐾=
𝜏𝜏𝐷𝐷
𝐾𝐾max=
5010
= 5 N ∙ mm−3 .
H
H
t 1
t1 t2
134
Na profilu se nacházejí dva rohy, a tak provedeme kontrolu v obou.
Roh vpravo dole (P) – přechod t1 – t2:
V rohu musíme popsat jeho geometrii pomocí dvou poloměrů křivosti:
𝑟𝑟1 = 𝜌𝜌 = 3 mm ,
𝑟𝑟2 = 𝑟𝑟1 +𝐾𝐾1 + 𝐾𝐾2
2= 3 +
10 + 72
= 11,5 mm .
Pro tuto geometrii stanovíma integrační konstantu C:
𝐶𝐶 = −𝐺𝐺 ∙ 𝜗𝜗 ∙ (𝑟𝑟2
2 − 𝑟𝑟12)
2 ∙ ln 𝑟𝑟2𝑟𝑟1
= −5 ∙ (11,52 − 32)
2 ∙ ln 11,53
= −229,3 N ∙ mm−1 .
Napětí v rohu vypočteme pomocí vztahů:
𝜏𝜏𝑜𝑜1𝑃𝑃 = 𝐺𝐺 ∙ 𝜗𝜗 ∙ 𝑟𝑟1 +𝐶𝐶𝑟𝑟1
= 5 ∙ 3 +−229,3
3= −61,4 N ∙ mm−2 .
𝜏𝜏𝑜𝑜2𝑃𝑃 = 𝐺𝐺 ∙ 𝜗𝜗 ∙ 𝑟𝑟2 +𝐶𝐶𝑟𝑟2
= 5 ∙ 11,5 +−229,3
11,5= +37,6 N ∙ mm−2 .
Roh vlevo dole (L) – přechod t1 – t1:
V rohu musíme popsat jeho geometrii pomocí dvou poloměrů křivosti:
𝑟𝑟1 = 𝜌𝜌 = 3 mm ,
𝑟𝑟2 = 𝑟𝑟1 + 𝐾𝐾1 = 3 + 10 = 13 mm .
Pro tuto geometrii stanovíma integrační konstantu C:
𝐶𝐶 = −𝐺𝐺 ∙ 𝜗𝜗 ∙ (𝑟𝑟2
2 − 𝑟𝑟12)
2 ∙ ln 𝑟𝑟2𝑟𝑟1
= −5 ∙ (132 − 32)
2 ∙ ln 133
= −272,8 N ∙ mm−1 .
Napětí v rohu vypočteme pomocí vztahů:
𝜏𝜏𝑜𝑜1𝐿𝐿 = 𝐺𝐺 ∙ 𝜗𝜗 ∙ 𝑟𝑟1 +𝐶𝐶𝑟𝑟1
= 5 ∙ 3 +−272,8
3= −75,9 N ∙ mm−2 .
𝜏𝜏𝑜𝑜2𝐿𝐿 = 𝐺𝐺 ∙ 𝜗𝜗 ∙ 𝑟𝑟2 +𝐶𝐶𝑟𝑟2
= 5 ∙ 13 +−272,8
3= +25,9 N ∙ mm−2 .
Největší napětí vzniká na vnitřním poloměru a na toto místo budeme redukovat návrhový moment:
𝜏𝜏max = 𝑚𝑚𝑎𝑎𝑚𝑚��𝜏𝜏𝑜𝑜1𝑃𝑃� ; �𝜏𝜏𝑜𝑜1𝐿𝐿�� = �𝜏𝜏𝑜𝑜1𝐿𝐿� = |−75,9| = 75,9 N ∙ mm−2 .
Hledaný dovolený krouticí moment v topmto případě bude:
𝑀𝑀𝐾𝐾𝐷𝐷 I = 𝑀𝑀𝐾𝐾 I ∙𝜏𝜏𝐷𝐷
𝜏𝜏max= 446 215 ∙
5075,9
= 293 949 N ∙ mm ≈ 0,29 kN ∙ m .
𝑀𝑀𝐾𝐾𝐷𝐷 II = 𝑀𝑀𝐾𝐾 II ∙𝜏𝜏𝐷𝐷
𝜏𝜏max= 440 265 ∙
5075,9
= 290 029 N ∙ mm ≈ 0,29 kN ∙ m .
Poznámka: Pokud jsme hledaný dovolený moment vyjádřili v [kN·m] na dvě desetinná místa, není již žádný rozdíl mezi I. a II. dělením profilu při výpočtu kvadratického momentu průřezu JK.
ρ r2
r1
t 1
t2
ρ r2 r1
t1
t 1
Pružnost a pevnost II ZS 2018/2019
135
PŘÍKLAD 6.9 (NEKRUHOVÝ TENKOSTĚNNÝ PROFIL – OTEVŘENÝ):
Dáno: Ocelový prut (G = 0,81⋅105 N⋅mm-2) délky A-B = 1 200 mm je vyrobený svařením dvou plochých částí (horní 72×6 rovné a dolní 100×4 ohnuté − tvar a rozměry viz obrázek) a je namáhán krouticím momentem MK = 3⋅105 N⋅mm.
Určit: τ (namáhání jednotlivých částí profilu), ϕA-B (natočení konců prutu A-B při volném kroucení).
Řešení: Protože řešený profil můžeme určitě považovat za tenkostěnný (h > 12⋅t), můžeme ho rozdělit na dva tenké obdélníky a celkový modul JKc určit jako součet dílčích modulů JK1 + JK2:
[ ] [ ] 433322
311 mm31774100672
31
31
≈⋅+⋅⋅=⋅+⋅⋅= ththJ Kc .
Maximální napětí v přímých částech určíme podle vztahů:
2-4
1
11max mmN6,24
63177103
⋅=⋅
===
tJM
WM
K
K
K
Kτ a 2-4
2
22max mmN4,16
43177103
⋅=⋅
===
tJM
WM
K
K
K
Kτ .
Toto napětí bude v krajních vláknech delších stran obou dílů řešeného svařeného profilu. Dále musíme ještě zkontrolovat oba rohy, které profil má (horní roh tvoří svar pouze se skutečným poloměrem r1, zatímco dolní roh je tvořen ohybem spodní části dolního dílu profilu).
Konstanta G⋅ϑ bude pro oba rohy stejná: 3-4
mmN1,43177103
⋅=⋅
==⋅K
K
JMG ϑ .
Konstantu C musíme pro každý roh určit zvlášť:
Horní roh: Dolní roh:
Vnitřní poloměr: mm21 =r Vnitřní poloměr: mm51 =r
Vnější poloměr: mm72
2112 =
++=
ttrr Vnější poloměr mm9212 =+= trr
1-22
mmN6,73
27ln2
)27(1,4⋅−=
⋅
−⋅−=C 1-
22
mmN3,195
59ln2
)59(1,4⋅−=
⋅
−⋅−=C ,
2-mmN6,282
6,7321,41
⋅=−
+⋅=rτ 2-mmN6,185
3,19551,41
⋅=−
+⋅=rτ ,
2-mmN2,187
6,7371,42
⋅=−
+⋅=rτ 2-mmN2,159
3,19591,42
⋅=−
+⋅=rτ .
Nejnamáhanějším místem řešeného profilu je horní roh, které má příliš malý poloměr zaoblení.
Natočení konců A-B prutu při volném kroucení určíme pomocí základního vztahu:
°≈=⋅⋅
⋅⋅=
⋅⋅
= 5,3rad061,031771081,0
20011035
4
K
K
JGM B-A
B-Aϕ .
72
88
6
4
22
R2
R5
MK
24,6 N⋅mm-2
16,4
N⋅mm
-2 28,6 N⋅mm-2
18,6 N⋅mm-2
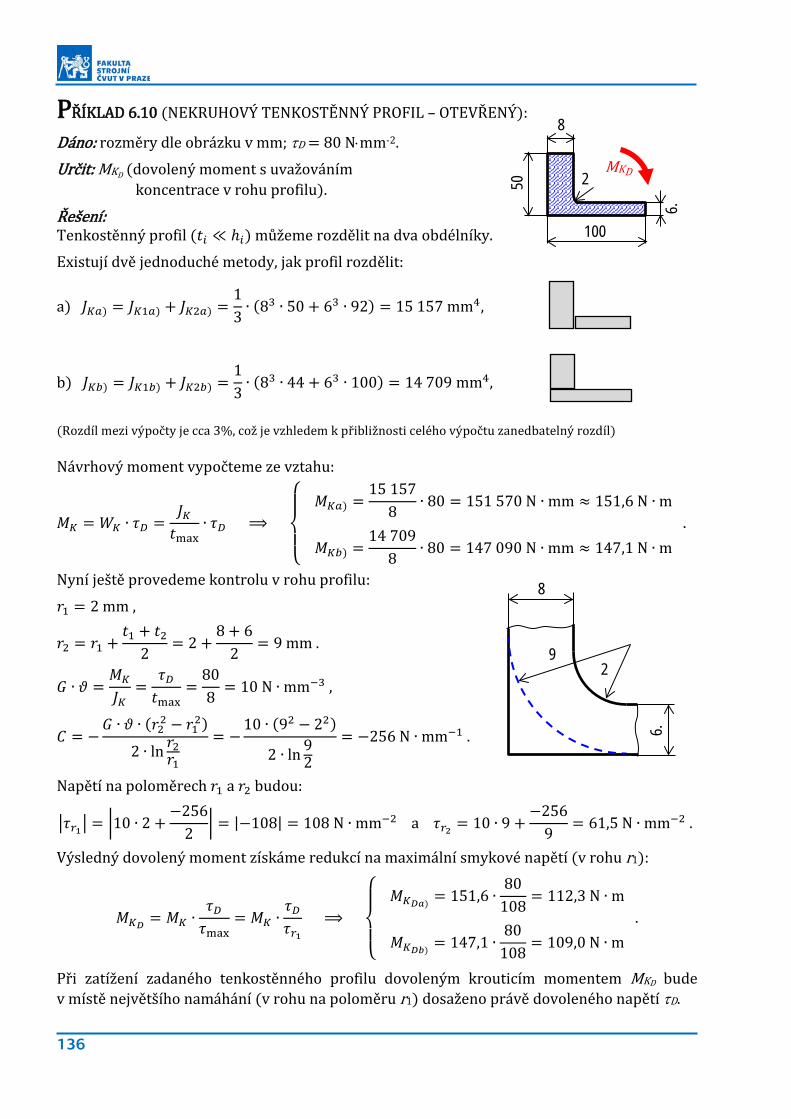
136
PŘÍKLAD 6.10 (NEKRUHOVÝ TENKOSTĚNNÝ PROFIL – OTEVŘENÝ):
Dáno: rozměry dle obrázku v mm; τD = 80 N⋅mm-2.
Určit: MKD (dovolený moment s uvažováním koncentrace v rohu profilu).
Řešení: Tenkostěnný profil (𝐾𝐾𝑖𝑖 ≪ ℎ𝑖𝑖) můžeme rozdělit na dva obdélníky.
Existují dvě jednoduché metody, jak profil rozdělit:
a) 𝐽𝐽𝐾𝐾𝑚𝑚) = 𝐽𝐽𝐾𝐾1𝑚𝑚) + 𝐽𝐽𝐾𝐾2𝑚𝑚) =13
∙ (83 ∙ 50 + 63 ∙ 92) = 15 157 mm4,
b) 𝐽𝐽𝐾𝐾𝑜𝑜) = 𝐽𝐽𝐾𝐾1𝑜𝑜) + 𝐽𝐽𝐾𝐾2𝑜𝑜) =13
∙ (83 ∙ 44 + 63 ∙ 100) = 14 709 mm4,
(Rozdíl mezi výpočty je cca 3%, což je vzhledem k přibližnosti celého výpočtu zanedbatelný rozdíl) Návrhový moment vypočteme ze vztahu:
𝑀𝑀𝐾𝐾 = 𝑊𝑊𝐾𝐾 ∙ 𝜏𝜏𝐷𝐷 =𝐽𝐽𝐾𝐾
𝐾𝐾max∙ 𝜏𝜏𝐷𝐷 ⟹
⎩⎪⎨
⎪⎧
𝑀𝑀𝐾𝐾𝑚𝑚) =
15 1578
∙ 80 = 151 570 N ∙ mm ≈ 151,6 N ∙ m
𝑀𝑀𝐾𝐾𝑜𝑜) =14 709
8∙ 80 = 147 090 N ∙ mm ≈ 147,1 N ∙ m
.
Nyní ještě provedeme kontrolu v rohu profilu:
𝑟𝑟1 = 2 mm ,
𝑟𝑟2 = 𝑟𝑟1 +𝐾𝐾1 + 𝐾𝐾2
2= 2 +
8 + 62
= 9 mm .
𝐺𝐺 ∙ 𝜗𝜗 =𝑀𝑀𝐾𝐾
𝐽𝐽𝐾𝐾=
𝜏𝜏𝐷𝐷
𝐾𝐾max=
808
= 10 N ∙ mm−3 ,
𝐶𝐶 = −𝐺𝐺 ∙ 𝜗𝜗 ∙ (𝑟𝑟2
2 − 𝑟𝑟12)
2 ∙ ln 𝑟𝑟2𝑟𝑟1
= −10 ∙ (92 − 22)
2 ∙ ln 92
= −256 N ∙ mm−1 .
Napětí na poloměrech 𝑟𝑟1 a 𝑟𝑟2 budou:
�𝜏𝜏𝑜𝑜1� = �10 ∙ 2 +−256
2� = |−108| = 108 N ∙ mm−2 a 𝜏𝜏𝑜𝑜2 = 10 ∙ 9 +
−2569
= 61,5 N ∙ mm−2 .
Výsledný dovolený moment získáme redukcí na maximální smykové napětí (v rohu r1):
𝑀𝑀𝐾𝐾𝐷𝐷 = 𝑀𝑀𝐾𝐾 ∙𝜏𝜏𝐷𝐷
𝜏𝜏max= 𝑀𝑀𝐾𝐾 ∙
𝜏𝜏𝐷𝐷
𝜏𝜏𝑜𝑜1
⟹
⎩⎪⎨
⎪⎧ 𝑀𝑀𝐾𝐾𝐷𝐷𝐷𝐷) = 151,6 ∙
80108
= 112,3 N ∙ m
𝑀𝑀𝐾𝐾𝐷𝐷𝐷𝐷) = 147,1 ∙80
108= 109,0 N ∙ m
.
Při zatížení zadaného tenkostěnného profilu dovoleným krouticím momentem MKD bude v místě největšího namáhání (v rohu na poloměru r1) dosaženo právě dovoleného napětí τD.
100
50
6.
8
MKD 2
ρ
9 2
8
6.
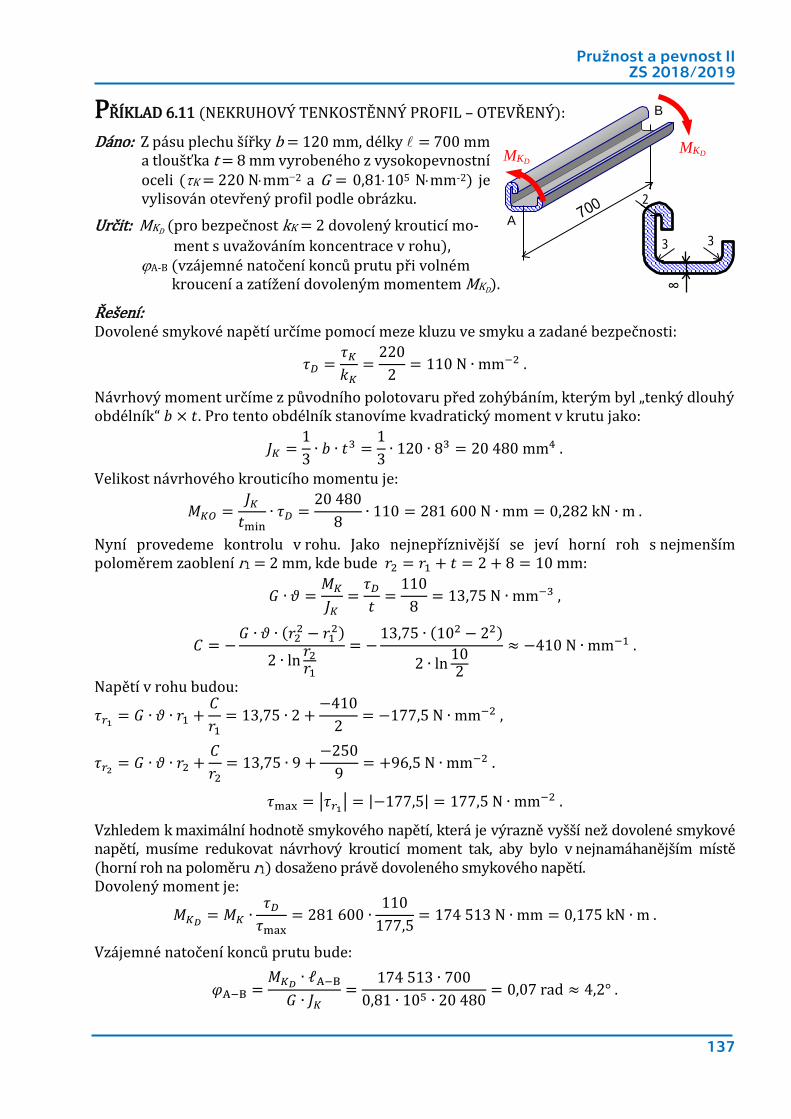
Pružnost a pevnost II ZS 2018/2019
137
PŘÍKLAD 6.11 (NEKRUHOVÝ TENKOSTĚNNÝ PROFIL – OTEVŘENÝ):
Dáno: Z pásu plechu šířky b = 120 mm, délky = 700 mm a tloušťka t = 8 mm vyrobeného z vysokopevnostní oceli (τK = 220 N⋅mm−2 a G = 0,81⋅105 N⋅mm-2) je vylisován otevřený profil podle obrázku.
Určit: MKD (pro bezpečnost kK = 2 dovolený krouticí mo-ment s uvažováním koncentrace v rohu),
ϕA-B (vzájemné natočení konců prutu při volném kroucení a zatížení dovoleným momentem MKD).
Řešení: Dovolené smykové napětí určíme pomocí meze kluzu ve smyku a zadané bezpečnosti:
𝜏𝜏𝐷𝐷 =𝜏𝜏𝐾𝐾
𝑘𝑘𝐾𝐾=
2202
= 110 N ∙ mm−2 .
Návrhový moment určíme z původního polotovaru před zohýbáním, kterým byl „tenký dlouhý obdélník“ 𝑏𝑏 × 𝐾𝐾. Pro tento obdélník stanovíme kvadratický moment v krutu jako:
𝐽𝐽𝐾𝐾 =13
∙ 𝑏𝑏 ∙ 𝐾𝐾3 =13
∙ 120 ∙ 83 = 20 480 mm4 .
Velikost návrhového krouticího momentu je:
𝑀𝑀𝐾𝐾𝑂𝑂 =𝐽𝐽𝐾𝐾
𝐾𝐾min∙ 𝜏𝜏𝐷𝐷 =
20 4808
∙ 110 = 281 600 N ∙ mm = 0,282 kN ∙ m .
Nyní provedeme kontrolu v rohu. Jako nejnepříznivější se jeví horní roh s nejmenším poloměrem zaoblení r1 = 2 mm, kde bude 𝑟𝑟2 = 𝑟𝑟1 + 𝐾𝐾 = 2 + 8 = 10 mm:
𝐺𝐺 ∙ 𝜗𝜗 =𝑀𝑀𝐾𝐾
𝐽𝐽𝐾𝐾=
𝜏𝜏𝐷𝐷
𝐾𝐾=
1108
= 13,75 N ∙ mm−3 ,
𝐶𝐶 = −𝐺𝐺 ∙ 𝜗𝜗 ∙ (𝑟𝑟2
2 − 𝑟𝑟12)
2 ∙ ln 𝑟𝑟2𝑟𝑟1
= −13,75 ∙ (102 − 22)
2 ∙ ln 102
≈ −410 N ∙ mm−1 .
Napětí v rohu budou:
𝜏𝜏𝑜𝑜1 = 𝐺𝐺 ∙ 𝜗𝜗 ∙ 𝑟𝑟1 +𝐶𝐶𝑟𝑟1
= 13,75 ∙ 2 +−410
2= −177,5 N ∙ mm−2 ,
𝜏𝜏𝑜𝑜2 = 𝐺𝐺 ∙ 𝜗𝜗 ∙ 𝑟𝑟2 +𝐶𝐶𝑟𝑟2
= 13,75 ∙ 9 +−250
9= +96,5 N ∙ mm−2 .
𝜏𝜏max = �𝜏𝜏𝑜𝑜1� = |−177,5| = 177,5 N ∙ mm−2 .
Vzhledem k maximální hodnotě smykového napětí, která je výrazně vyšší než dovolené smykové napětí, musíme redukovat návrhový krouticí moment tak, aby bylo v nejnamáhanějším místě (horní roh na poloměru r1) dosaženo právě dovoleného smykového napětí. Dovolený moment je:
𝑀𝑀𝐾𝐾𝐷𝐷 = 𝑀𝑀𝐾𝐾 ∙𝜏𝜏𝐷𝐷
𝜏𝜏max= 281 600 ∙
110177,5
= 174 513 N ∙ mm = 0,175 kN ∙ m .
Vzájemné natočení konců prutu bude:
𝜑𝜑A−B =𝑀𝑀𝐾𝐾𝐷𝐷 ∙ ℓA−B
𝐺𝐺 ∙ 𝐽𝐽𝐾𝐾=
174 513 ∙ 7000,81 ∙ 105 ∙ 20 480
= 0,07 rad ≈ 4,2° .
MKD MKD
A
B
2
8
3 3

138
v 1
v 2 průmět vrchlíku
napětí
PŘÍKLAD 6.12 (NEKRUHOVÝ TENKOSTĚNNÝ PROFIL – VÍCEDUTINOVÝ/VÍCEKOMOROVÝ):
Dáno: Prut je vyrobený z obdélníkového tenkostěnného profilu s příčkou, která vnitřek profilu rozděluje na dvě komory a . Prut je namáhán krouticím momentem MK (pro jednoduchost jsou udány přímo rozměry střednic jednotlivých částí).
Určit: Namáhání jednotlivých částí profilu (bez přepočtů).
Řešení: Obecný postup řešení tohoto profilu si rozdělíme do několika postupných kroků:
1. Naznačíme vrchlík napětí, který nad průřezem musí vzniknout. Opět budeme vzhledem k předpokládané tenkostěnnosti profilu předpokládat, že průběh funkce napětí po šířce stěny bude lineární. Velikosti funkce napětí budou tvořit výšky vrchlíku v1 a v2.
2. Spád vrchlíku napětí bude určovat velikost smykových napětí v jednotlivých částech průřezu:
1
11 t
vs =τ ,
2
22 t
vs =τ a
3
213 t
vvs
−=τ .
3. Dvojnásobný objem vrchlíku napětí VF určuje velikost přenášeného krouticího momentu MK:
( ) ( )2221112211 222 scscccFK tAtAvAvAVM ττ ⋅⋅+⋅⋅⋅=⋅+⋅⋅=⋅= .
4. Použijeme Stokesovu větu ve tvaru ∫ ⋅=⋅⋅⋅ dsAG sc τϑ2 a z ní určíme zkrut obou komor:
1
3311
11 2
1
c
ss
AG ⋅⋅+⋅
⋅= ττϑ a
2
3322
22 2
1
c
ss
AG ⋅⋅−⋅
⋅= ττϑ ,
kde: )(2 111 bh +⋅= a )(2 222 bh +⋅= ... délka střednice 1. a 2. komory,
2
213
bb +≈ ... délka společné střednice 1. a 2. komory,
111 bhAc ⋅= a 222 bhAc ⋅= ... plocha střednice 1. a 2. komory,
5. Doplníme deformační podmínku, která musí zajistit shodnou deformaci obou komor:
21 ϑϑ = , a protože musí být GGG == 21 ⇒ 2
3322
1
3311
c
ss
c
ss
AA ⋅−⋅
=⋅+⋅ ττττ .
6. Výsledná střední smyková napětí τs1, τs2 a τs3 po dosazení a úpravě jsou:
221321
22132
21231
12321311 )(
)(2 cccc
cccKs AAttAttAtt
AtAAtM+⋅⋅⋅+⋅⋅⋅+⋅⋅⋅
⋅⋅++⋅⋅⋅=
τ ,
221321
22132
21231
21321312 )(
)(2 cccc
cccKs AAttAttAtt
AtAAtM+⋅⋅⋅+⋅⋅⋅+⋅⋅⋅
⋅⋅++⋅⋅⋅=
τ ,
221321
22132
21231
2121213 )(2 cccc
ccKs AAttAttAtt
AtAtM+⋅⋅⋅+⋅⋅⋅+⋅⋅⋅
⋅⋅−⋅⋅⋅=
τ .
h1 h2
b 1
b 2
t 1 t 2
t1 t3 t2
MK
τs1 τs3 τs2
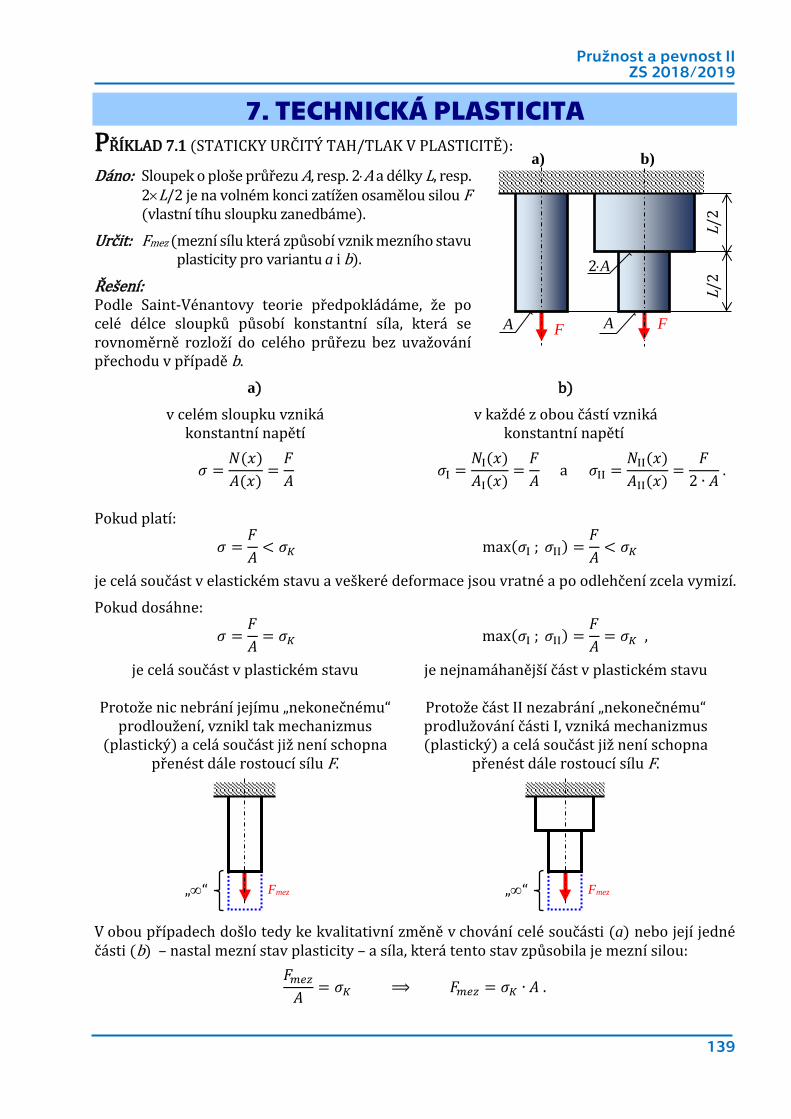
Pružnost a pevnost II ZS 2018/2019
139
7. TECHNICKÁ PLASTICITA PŘÍKLAD 7.1 (STATICKY URČITÝ TAH/TLAK V PLASTICITĚ):
Dáno: Sloupek o ploše průřezu A, resp. 2⋅A a délky L, resp. 2×L/2 je na volném konci zatížen osamělou silou F (vlastní tíhu sloupku zanedbáme).
Určit: Fmez (mezní sílu která způsobí vznik mezního stavu plasticity pro variantu a i b).
Řešení: Podle Saint-Vénantovy teorie předpokládáme, že po celé délce sloupků působí konstantní síla, která se rovnoměrně rozloží do celého průřezu bez uvažování přechodu v případě b.
a) b)
v celém sloupku vzniká v každé z obou částí vzniká konstantní napětí konstantní napětí
𝜎𝜎 =𝑁𝑁(𝑚𝑚)𝐴𝐴(𝑚𝑚)
=𝐹𝐹𝐴𝐴
𝜎𝜎I =𝑁𝑁I(𝑚𝑚)𝐴𝐴I(𝑚𝑚)
=𝐹𝐹𝐴𝐴
a 𝜎𝜎II =𝑁𝑁II(𝑚𝑚)𝐴𝐴II(𝑚𝑚)
=𝐹𝐹
2 ∙ 𝐴𝐴 .
Pokud platí:
𝜎𝜎 =𝐹𝐹𝐴𝐴
< 𝜎𝜎𝐾𝐾 max(𝜎𝜎I ; 𝜎𝜎II) =𝐹𝐹𝐴𝐴
< 𝜎𝜎𝐾𝐾
je celá součást v elastickém stavu a veškeré deformace jsou vratné a po odlehčení zcela vymizí.
Pokud dosáhne:
𝜎𝜎 =𝐹𝐹𝐴𝐴
= 𝜎𝜎𝐾𝐾 max(𝜎𝜎I ; 𝜎𝜎II) =𝐹𝐹𝐴𝐴
= 𝜎𝜎𝐾𝐾 ,
je celá součást v plastickém stavu je nejnamáhanější část v plastickém stavu Protože nic nebrání jejímu „nekonečnému“ Protože část II nezabrání „nekonečnému“ prodloužení, vznikl tak mechanizmus prodlužování části I, vzniká mechanizmus (plastický) a celá součást již není schopna (plastický) a celá součást již není schopna přenést dále rostoucí sílu F. přenést dále rostoucí sílu F. V obou případech došlo tedy ke kvalitativní změně v chování celé součásti (a) nebo její jedné části (b) – nastal mezní stav plasticity – a síla, která tento stav způsobila je mezní silou:
𝐹𝐹𝑚𝑚𝑐𝑐𝑧𝑧
𝐴𝐴= 𝜎𝜎𝐾𝐾 ⟹ 𝐹𝐹𝑚𝑚𝑐𝑐𝑧𝑧 = 𝜎𝜎𝐾𝐾 ∙ 𝐴𝐴 .
L/2
L/2
A F A F
2⋅A
a) b)
Fmez „∞“ Fmez „∞“
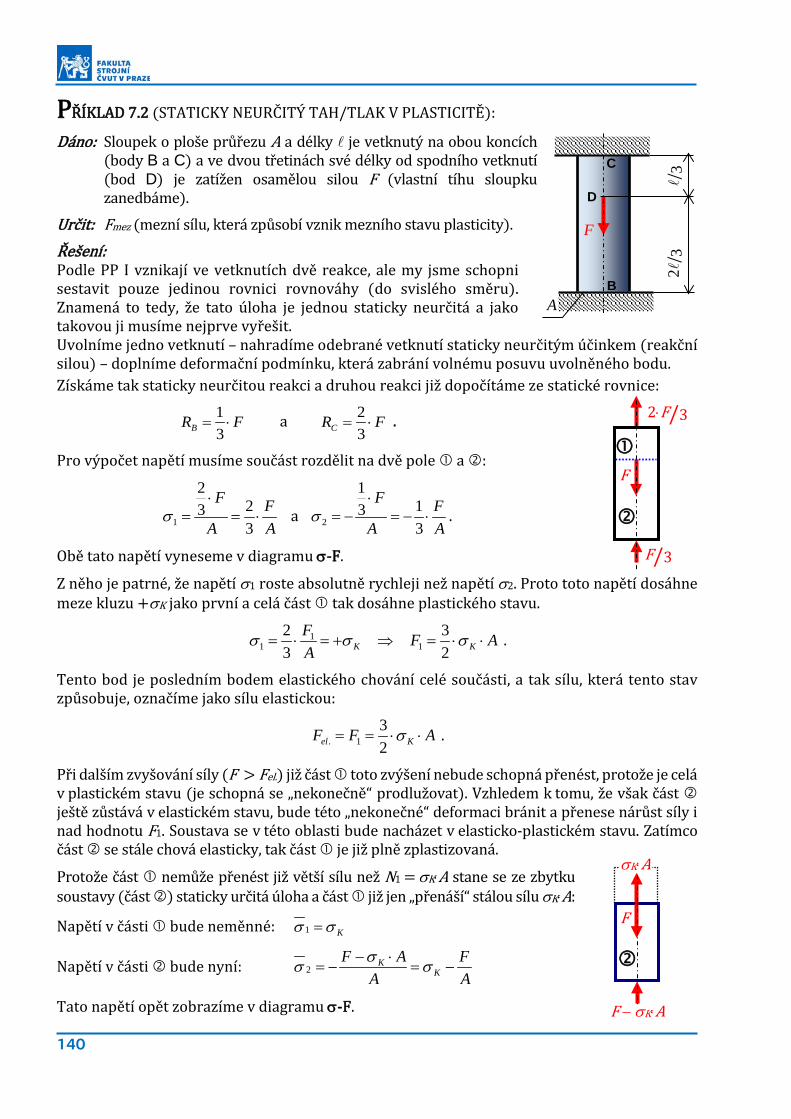
140
PŘÍKLAD 7.2 (STATICKY NEURČITÝ TAH/TLAK V PLASTICITĚ):
Dáno: Sloupek o ploše průřezu A a délky je vetknutý na obou koncích (body B a C) a ve dvou třetinách své délky od spodního vetknutí (bod D) je zatížen osamělou silou F (vlastní tíhu sloupku zanedbáme).
Určit: Fmez (mezní sílu, která způsobí vznik mezního stavu plasticity).
Řešení: Podle PP I vznikají ve vetknutích dvě reakce, ale my jsme schopni sestavit pouze jedinou rovnici rovnováhy (do svislého směru). Znamená to tedy, že tato úloha je jednou staticky neurčitá a jako takovou ji musíme nejprve vyřešit. Uvolníme jedno vetknutí – nahradíme odebrané vetknutí staticky neurčitým účinkem (reakční silou) – doplníme deformační podmínku, která zabrání volnému posuvu uvolněného bodu.
Získáme tak staticky neurčitou reakci a druhou reakci již dopočítáme ze statické rovnice:
FRB ⋅=31 a FRC ⋅=
32 .
Pro výpočet napětí musíme součást rozdělit na dvě pole a :
AF
A
F⋅=
⋅=
323
2
1σ a AF
A
F⋅−=
⋅−=
313
1
2σ .
Obě tato napětí vyneseme v diagramu σ-F.
Z něho je patrné, že napětí σ1 roste absolutně rychleji než napětí σ2. Proto toto napětí dosáhne meze kluzu +σK jako první a celá část tak dosáhne plastického stavu.
KAF σσ +=⋅= 1
1 32 ⇒ AF K ⋅⋅= σ
23
1 .
Tento bod je posledním bodem elastického chování celé součásti, a tak sílu, která tento stav způsobuje, označíme jako sílu elastickou:
AFF Kel ⋅⋅== σ23
1. .
Při dalším zvyšování síly (F > Fel.) již část toto zvýšení nebude schopná přenést, protože je celá v plastickém stavu (je schopná se „nekonečně“ prodlužovat). Vzhledem k tomu, že však část ještě zůstává v elastickém stavu, bude této „nekonečné“ deformaci bránit a přenese nárůst síly i nad hodnotu F1. Soustava se v této oblasti bude nacházet v elasticko-plastickém stavu. Zatímco část se stále chová elasticky, tak část je již plně zplastizovaná.
Protože část nemůže přenést již větší sílu než N1 = σK⋅A stane se ze zbytku soustavy (část ) staticky určitá úloha a část již jen „přenáší“ stálou sílu σK⋅A:
Napětí v části bude neměnné: Kσσ =1
Napětí v části bude nyní: AF
AAF
KK −=
⋅−−= σσσ 2
Tato napětí opět zobrazíme v diagramu σ-F.
2/3
A
F
/3
D
B
C
F
2⋅F/3
F/3
F
F − σK⋅A
σK⋅A
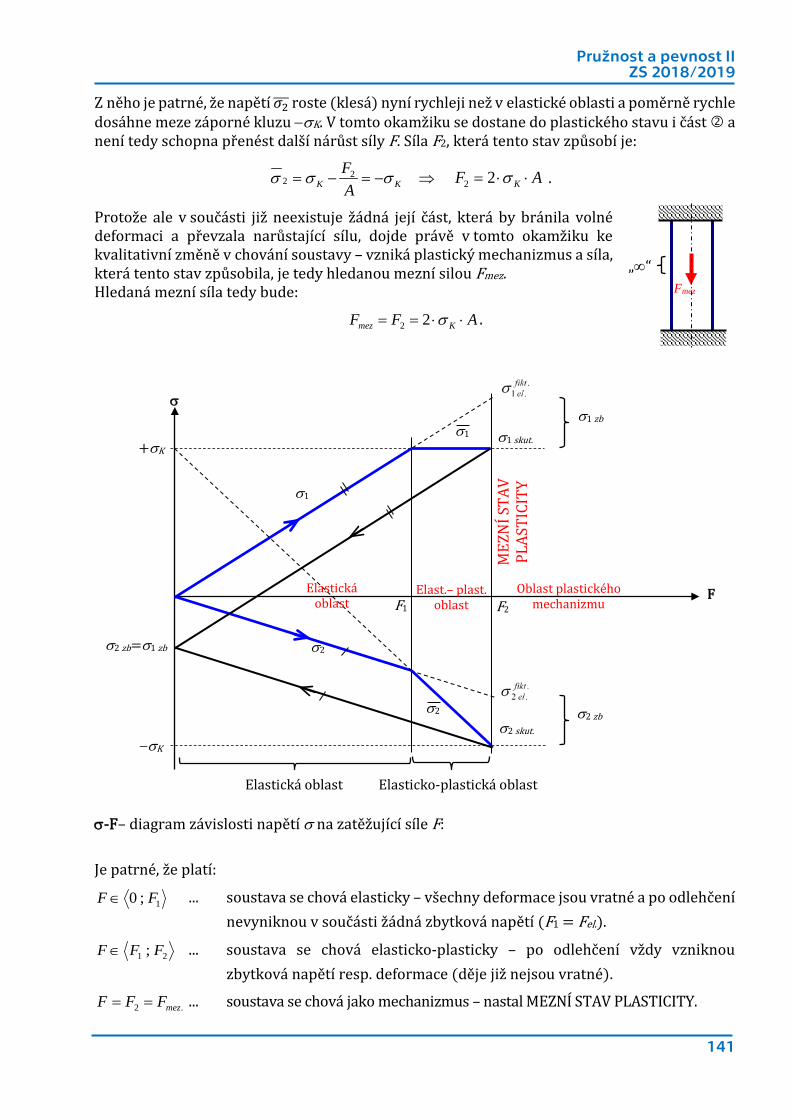
Pružnost a pevnost II ZS 2018/2019
141
Z něho je patrné, že napětí 𝜎𝜎2��� roste (klesá) nyní rychleji než v elastické oblasti a poměrně rychle dosáhne meze záporné kluzu −σK. V tomto okamžiku se dostane do plastického stavu i část a není tedy schopna přenést další nárůst síly F. Síla F2, která tento stav způsobí je:
KK AF σσσ −=−= 2
2 ⇒ AF K ⋅⋅= σ22 .
Protože ale v součásti již neexistuje žádná její část, která by bránila volné deformaci a převzala narůstající sílu, dojde právě v tomto okamžiku ke kvalitativní změně v chování soustavy – vzniká plastický mechanizmus a síla, která tento stav způsobila, je tedy hledanou mezní silou Fmez. Hledaná mezní síla tedy bude:
AFF Kmez ⋅⋅== σ22 .
σ-F– diagram závislosti napětí σ na zatěžující síle F:
Je patrné, že platí:
1;0 FF ∈ ... soustava se chová elasticky – všechny deformace jsou vratné a po odlehčení nevyniknou v součásti žádná zbytková napětí (F1 = Fel.).
21 ; FFF ∈ ... soustava se chová elasticko-plasticky – po odlehčení vždy vzniknou zbytková napětí resp. deformace (děje již nejsou vratné).
.2 mezFFF == ... soustava se chová jako mechanizmus – nastal MEZNÍ STAV PLASTICITY.
F
σ
Elastická oblast Elasticko-plastická oblast
+σK
−σK
σ1
σ2
F1 F2
Oblast plastického mechanizmu
MEZ
NÍ S
TAV
PLAS
TICI
TY
σ1
σ2
σ2 zb=σ1 zb
σ1 skut.
σ2 skut.
σ1 zb
σ2 zb
Fmez
„∞“
Elastická oblast
Elast.– plast. oblast

142
Zbytková napětí (deformace) po odlehčení z mezního stavu plasticity. Pro výpočet zbytkových napětí resp. deformací použijeme dříve zavedenou větu:
...
fiktelskutzb σσσ −= resp. .
..fikt
elskutzb uuu −= .
Pro napětí v části platí: Kskut σσ =.1
⇒ .
KKmezfikt
el AA
AF σσσ ⋅=
⋅⋅⋅=⋅=
342
32
32 ..
.1
Povšimněte si, že Kfiktel σσ >.
.1 , což je opravdu pouze fiktivní možnost, protože podle teorie ideálně elasticko-plastického materiálu bez zpevnění napětí vyšší než mez kluzu nejsou možná. Pro napětí v části platí:
Kskut σσ −=.2 ⇒
KKmezfikt
el AA
AF σσσ ⋅−=
⋅⋅⋅−=⋅−=
322
31
31 ..
.2
Poznámky: • Zbytková napětí v obou částech MUSELA vyjít stejná, protože se jedná o jednu součást po odlehčení již bez
jakéhokoliv vnějšího zatížení. V soustavě vznikl tzv. samorovnovážný stav.
Pro deformaci části platí:
( ) ( )
⋅⋅+=
⋅
⋅⋅⋅−⋅⋅+=
⋅
⋅⋅⋅−−−=−=
EAE
AA
AE
AFuu K
KKKmez
skutFσσσσ
323
2232
.
2.1 ,
⋅⋅+=⋅
⋅⋅⋅⋅⋅+=
⋅
⋅⋅⋅+=
EAE
A
AE
Fu K
Kmezfiktel
σσ
923
1231
31
31
..
.1 .
Zbytková deformace působiště síly F (bod D) po odlehčení z mezní síly bude:
⋅⋅+=⋅⋅−⋅⋅+=EEE
u KKKzbytF
σσσ94
92
32
.1.
• Znaménko „+“ značí, že se jedná o prodloužení - posunutí bodu D dolů. Pro deformaci části platí:
( ) ( )
⋅⋅−=
⋅
⋅⋅⋅−⋅⋅−=
⋅
⋅⋅⋅−−=
EAE
AA
AE
AFu K
KKKmez
skutFσσσσ
323
2232
.
.2 ,
⋅⋅−=⋅
⋅⋅⋅⋅⋅−=
⋅
⋅⋅⋅−=
EAE
A
AE
Fu K
Kmezfiktel
σσ
923
1231
31
31
...2
.
Zbytková deformace působiště síly F (bod D) po odlehčení z mezní síly bude:
⋅⋅−=
⋅⋅−−⋅⋅−=
EEEu KKK
zbytFσσσ
94
92
32
.2 .
• Znaménko „−“ značí, že se jedná o zkrácení - posunutí bodu D dolů, což je ve shodě s výsledkem z , protože i po odlehčení musí být zachována spojitost.
KKKzb σσσσ ⋅−=⋅−=31
34
.1
KKKzb σσσσ ⋅−=
⋅−−−=
31
32
.2
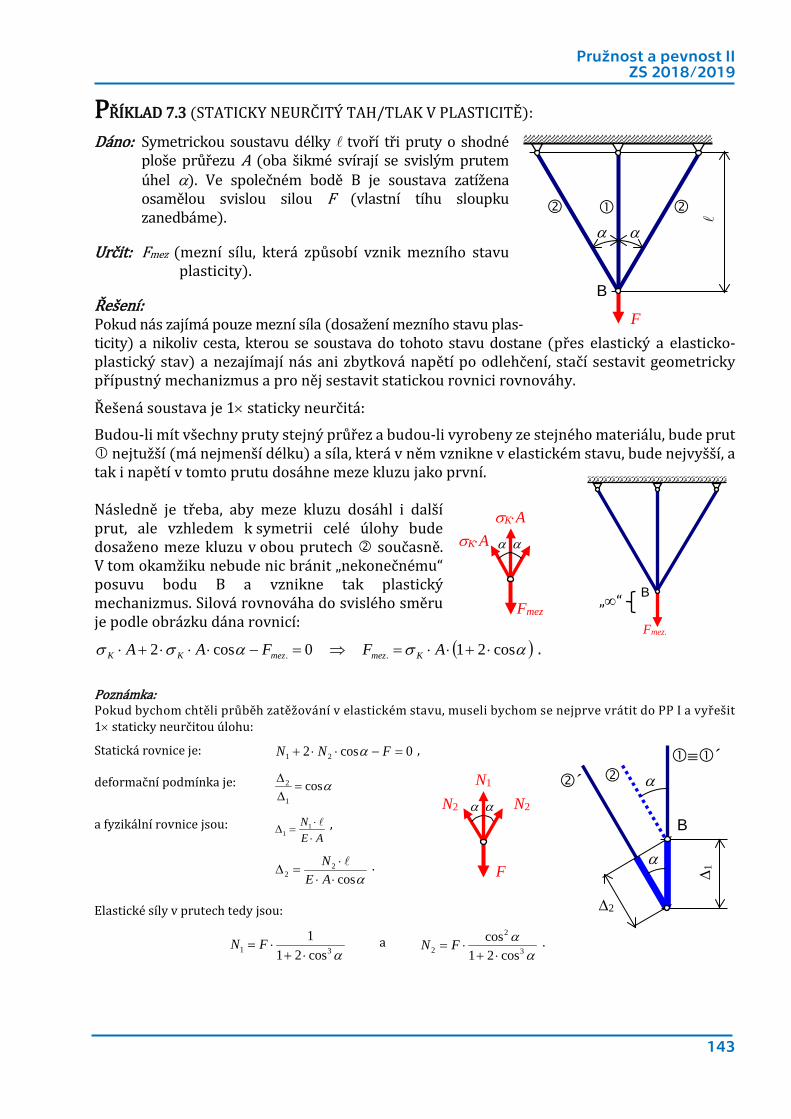
Pružnost a pevnost II ZS 2018/2019
143
PŘÍKLAD 7.3 (STATICKY NEURČITÝ TAH/TLAK V PLASTICITĚ):
Dáno: Symetrickou soustavu délky tvoří tři pruty o shodné ploše průřezu A (oba šikmé svírají se svislým prutem úhel α). Ve společném bodě B je soustava zatížena osamělou svislou silou F (vlastní tíhu sloupku zanedbáme).
Určit: Fmez (mezní sílu, která způsobí vznik mezního stavu plasticity).
Řešení: Pokud nás zajímá pouze mezní síla (dosažení mezního stavu plas- ticity) a nikoliv cesta, kterou se soustava do tohoto stavu dostane (přes elastický a elasticko-plastický stav) a nezajímají nás ani zbytková napětí po odlehčení, stačí sestavit geometricky přípustný mechanizmus a pro něj sestavit statickou rovnici rovnováhy.
Řešená soustava je 1× staticky neurčitá:
Budou-li mít všechny pruty stejný průřez a budou-li vyrobeny ze stejného materiálu, bude prut nejtužší (má nejmenší délku) a síla, která v něm vznikne v elastickém stavu, bude nejvyšší, a tak i napětí v tomto prutu dosáhne meze kluzu jako první. Následně je třeba, aby meze kluzu dosáhl i další prut, ale vzhledem k symetrii celé úlohy bude dosaženo meze kluzu v obou prutech současně. V tom okamžiku nebude nic bránit „nekonečnému“ posuvu bodu B a vznikne tak plastický mechanizmus. Silová rovnováha do svislého směru je podle obrázku dána rovnicí:
0cos2 . =−⋅⋅⋅+⋅ mezKK FAA ασσ ⇒ ( )ασ cos21. ⋅+⋅⋅= AF Kmez .
Poznámka: Pokud bychom chtěli průběh zatěžování v elastickém stavu, museli bychom se nejprve vrátit do PP I a vyřešit 1× staticky neurčitou úlohu:
Statická rovnice je: 0cos2 21 =−⋅⋅+ FNN α ,
deformační podmínka je: αcos1
2 =∆∆
a fyzikální rovnice jsou: AE
N⋅⋅
=∆1
1 ,
αcos
22 ⋅⋅
⋅=∆
AEN .
Elastické síly v prutech tedy jsou:
α31 cos211
⋅+⋅= FN a
αα
3
2
2 cos21cos
⋅+⋅= FN .
F
α
α
B
Fmez.
B „∞“
F
α α N2 N2 N1
∆ 1
α
α
≡´ ´
B
∆2
Fmez
α α σK⋅A σK⋅A
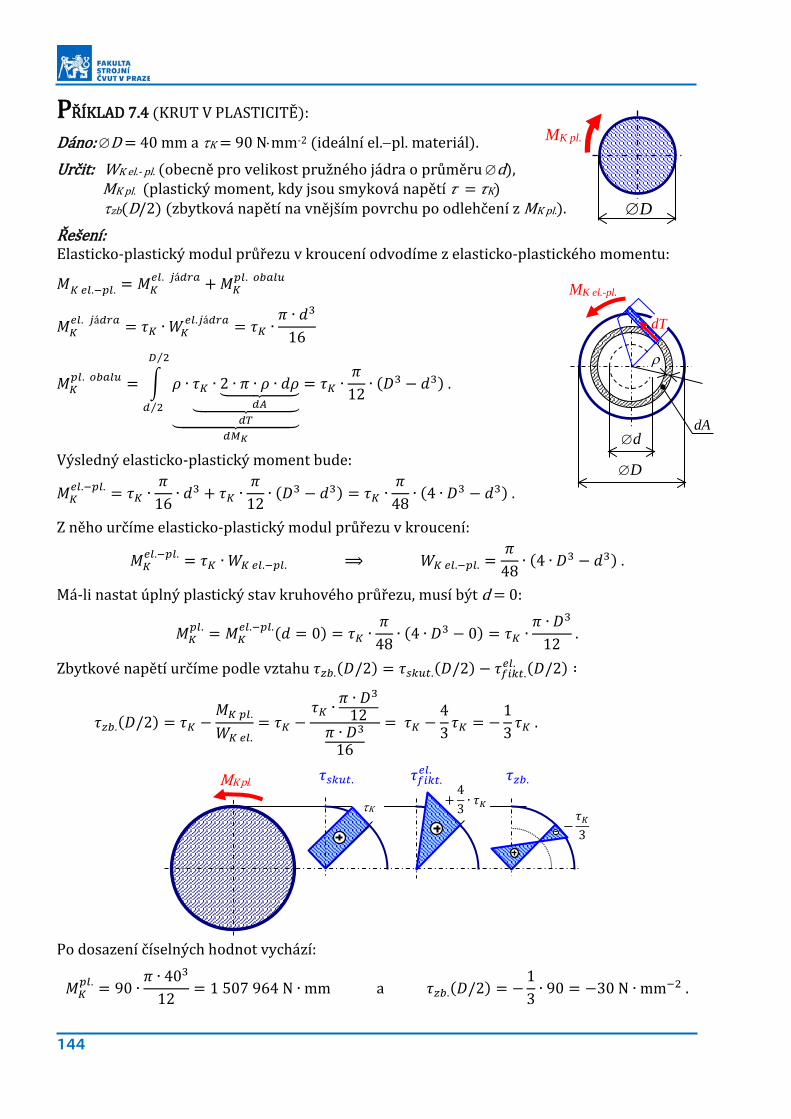
144
PŘÍKLAD 7.4 (KRUT V PLASTICITĚ):
Dáno: ∅D = 40 mm a τK = 90 N⋅mm-2 (ideální el.−pl. materiál).
Určit: WK el.- pl. (obecně pro velikost pružného jádra o průměru ∅d), MK pl. (plastický moment, kdy jsou smyková napětí 𝜏𝜏 = 𝜏𝜏K) τzb(D/2) (zbytková napětí na vnějším povrchu po odlehčení z MK pl.).
Řešení: Elasticko-plastický modul průřezu v kroucení odvodíme z elasticko-plastického momentu:
𝑀𝑀𝐾𝐾 𝑐𝑐𝑑𝑑.−𝑝𝑝𝑑𝑑. = 𝑀𝑀𝐾𝐾𝑐𝑐𝑑𝑑. 𝑗𝑗á𝑑𝑑𝑜𝑜𝑚𝑚 + 𝑀𝑀𝐾𝐾
𝑝𝑝𝑑𝑑. 𝑑𝑑𝑜𝑜𝑚𝑚𝑑𝑑𝑢𝑢
𝑀𝑀𝐾𝐾𝑐𝑐𝑑𝑑. 𝑗𝑗á𝑑𝑑𝑜𝑜𝑚𝑚 = 𝜏𝜏𝐾𝐾 ∙ 𝑊𝑊𝐾𝐾
𝑐𝑐𝑑𝑑.𝑗𝑗á𝑑𝑑𝑜𝑜𝑚𝑚 = 𝜏𝜏𝐾𝐾 ∙𝜋𝜋 ∙ 𝑑𝑑3
16
𝑀𝑀𝐾𝐾𝑝𝑝𝑑𝑑. 𝑑𝑑𝑜𝑜𝑚𝑚𝑑𝑑𝑢𝑢 = � 𝜌𝜌 ∙ 𝜏𝜏𝐾𝐾 ∙ 2 ∙ 𝜋𝜋 ∙ 𝜌𝜌 ∙ 𝑑𝑑𝜌𝜌���������
𝑑𝑑𝐴𝐴�����������𝑑𝑑𝑇𝑇�������������
𝑑𝑑𝑀𝑀𝐾𝐾
𝐷𝐷 2⁄
𝑑𝑑 2⁄
= 𝜏𝜏𝐾𝐾 ∙𝜋𝜋
12∙ (𝐷𝐷3 − 𝑑𝑑3) .
Výsledný elasticko-plastický moment bude:
𝑀𝑀𝐾𝐾𝑐𝑐𝑑𝑑.−𝑝𝑝𝑑𝑑. = 𝜏𝜏𝐾𝐾 ∙
𝜋𝜋16
∙ 𝑑𝑑3 + 𝜏𝜏𝐾𝐾 ∙𝜋𝜋
12∙ (𝐷𝐷3 − 𝑑𝑑3) = 𝜏𝜏𝐾𝐾 ∙
𝜋𝜋48
∙ (4 ∙ 𝐷𝐷3 − 𝑑𝑑3) .
Z něho určíme elasticko-plastický modul průřezu v kroucení:
𝑀𝑀𝐾𝐾𝑐𝑐𝑑𝑑.−𝑝𝑝𝑑𝑑. = 𝜏𝜏𝐾𝐾 ∙ 𝑊𝑊𝐾𝐾 𝑐𝑐𝑑𝑑.−𝑝𝑝𝑑𝑑. ⟹ 𝑊𝑊𝐾𝐾 𝑐𝑐𝑑𝑑.−𝑝𝑝𝑑𝑑. =
𝜋𝜋48
∙ (4 ∙ 𝐷𝐷3 − 𝑑𝑑3) .
Má-li nastat úplný plastický stav kruhového průřezu, musí být d = 0:
𝑀𝑀𝐾𝐾𝑝𝑝𝑑𝑑. = 𝑀𝑀𝐾𝐾
𝑐𝑐𝑑𝑑.−𝑝𝑝𝑑𝑑.(𝑑𝑑 = 0) = 𝜏𝜏𝐾𝐾 ∙𝜋𝜋
48∙ (4 ∙ 𝐷𝐷3 − 0) = 𝜏𝜏𝐾𝐾 ∙
𝜋𝜋 ∙ 𝐷𝐷3
12 .
Zbytkové napětí určíme podle vztahu 𝜏𝜏𝑧𝑧𝑜𝑜.(𝐷𝐷/2) = 𝜏𝜏𝑘𝑘𝑐𝑐𝑢𝑢𝑒𝑒.(𝐷𝐷/2) − 𝜏𝜏𝑓𝑓𝑖𝑖𝑐𝑐𝑒𝑒.𝑐𝑐𝑑𝑑. (𝐷𝐷/2) ∶
𝜏𝜏𝑧𝑧𝑜𝑜.(𝐷𝐷/2) = 𝜏𝜏𝐾𝐾 −𝑀𝑀𝐾𝐾 𝑝𝑝𝑑𝑑.
𝑊𝑊𝐾𝐾 𝑐𝑐𝑑𝑑.= 𝜏𝜏𝐾𝐾 −
𝜏𝜏𝐾𝐾 ∙ 𝜋𝜋 ∙ 𝐷𝐷3
12𝜋𝜋 ∙ 𝐷𝐷3
16
= 𝜏𝜏𝐾𝐾 −43
𝜏𝜏𝐾𝐾 = −13
𝜏𝜏𝐾𝐾 .
Po dosazení číselných hodnot vychází:
𝑀𝑀𝐾𝐾𝑝𝑝𝑑𝑑. = 90 ∙
𝜋𝜋 ∙ 403
12= 1 507 964 N ∙ mm a 𝜏𝜏𝑧𝑧𝑜𝑜.(𝐷𝐷/2) = −
13
∙ 90 = −30 N ∙ mm−2 .
∅D
MK pl.
τK MK el.-pl.
∅d
∅D
ρ dρ
dT
dA
−𝜏𝜏𝐾𝐾
3
τK
𝜏𝜏𝑘𝑘𝑐𝑐𝑢𝑢𝑒𝑒. 𝜏𝜏𝑓𝑓𝑖𝑖𝑐𝑐𝑒𝑒.𝑐𝑐𝑑𝑑. 𝜏𝜏𝑧𝑧𝑜𝑜. MK pl.
+43
∙ 𝜏𝜏𝐾𝐾
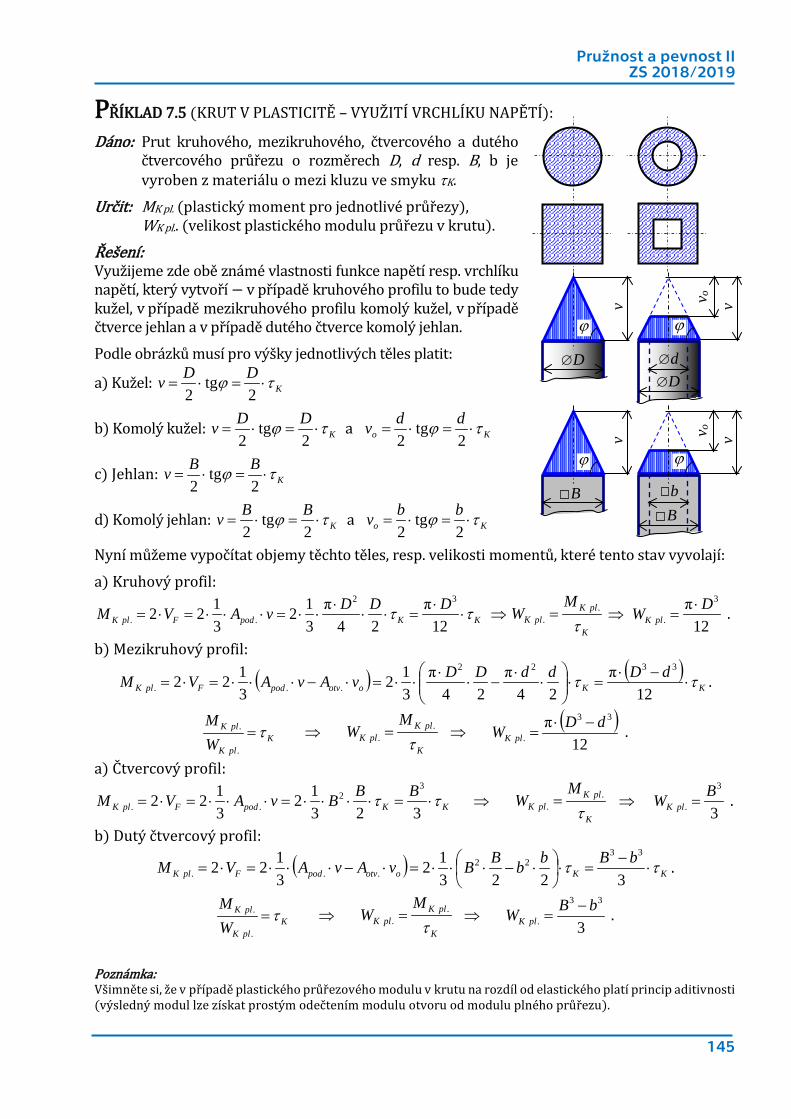
Pružnost a pevnost II ZS 2018/2019
145
PŘÍKLAD 7.5 (KRUT V PLASTICITĚ – VYUŽITÍ VRCHLÍKU NAPĚTÍ):
Dáno: Prut kruhového, mezikruhového, čtvercového a dutého čtvercového průřezu o rozměrech D, d resp. B, b je vyroben z materiálu o mezi kluzu ve smyku τK.
Určit: MK pl. (plastický moment pro jednotlivé průřezy), WK pl.. (velikost plastického modulu průřezu v krutu).
Řešení: Využijeme zde obě známé vlastnosti funkce napětí resp. vrchlíku napětí, který vytvoří − v případě kruhového profilu to bude tedy kužel, v případě mezikruhového profilu komolý kužel, v případě čtverce jehlan a v případě dutého čtverce komolý jehlan.
Podle obrázků musí pro výšky jednotlivých těles platit:
a) Kužel: KDDv τϕ ⋅=⋅=2
tg2
b) Komolý kužel: KDDv τϕ ⋅=⋅=2
tg2
a Koddv τϕ ⋅=⋅=2
tg2
c) Jehlan: KBBv τϕ ⋅=⋅=2
tg2
d) Komolý jehlan: KBBv τϕ ⋅=⋅=2
tg2
a Kobbv τϕ ⋅=⋅=2
tg2
Nyní můžeme vypočítat objemy těchto těles, resp. velikosti momentů, které tento stav vyvolají:
a) Kruhový profil:
KKpodFplKDDDvAVM ττ ⋅
⋅=⋅⋅
⋅⋅⋅=⋅⋅⋅=⋅=
12π
24π
312
3122
32
.. ⇒ K
plKplK
MW
τ.
. = ⇒ 12
π 3
.DW plK
⋅= .
b) Mezikruhový profil:
( ) ( )KKootvpodFplK
dDddDDvAvAVM ττ ⋅−⋅
=⋅
⋅
⋅−⋅
⋅⋅⋅=⋅−⋅⋅⋅=⋅=
12π
24π
24π
312
3122
3322
... .
KplK
plK
WM
τ=.
. ⇒ K
plKplK
MW
τ.
. = ⇒ ( )12
π 33
.dDW plK
−⋅= .
a) Čtvercový profil:
KKpodFplKBBBvAVM ττ ⋅=⋅⋅⋅⋅=⋅⋅⋅=⋅=323
123122
32
.. ⇒ K
plKplK
MW
τ.
. = ⇒ 3
3
.BW plK = .
b) Dutý čtvercový profil:
( ) KKootvpodFplKbBbbBBvAvAVM ττ ⋅
−=⋅
⋅−⋅⋅⋅=⋅−⋅⋅⋅=⋅=
322312
3122
3322
... .
KplK
plK
WM
τ=.
. ⇒ K
plKplK
MW
τ.
. = ⇒ 3
33
.bBW plK
−= .
Poznámka: Všimněte si, že v případě plastického průřezového modulu v krutu na rozdíl od elastického platí princip aditivnosti (výsledný modul lze získat prostým odečtením modulu otvoru od modulu plného průřezu).
∅D
v
ϕ
∅D
v v o
∅d
ϕ
v v o
ϕ
b
B
v
ϕ
B
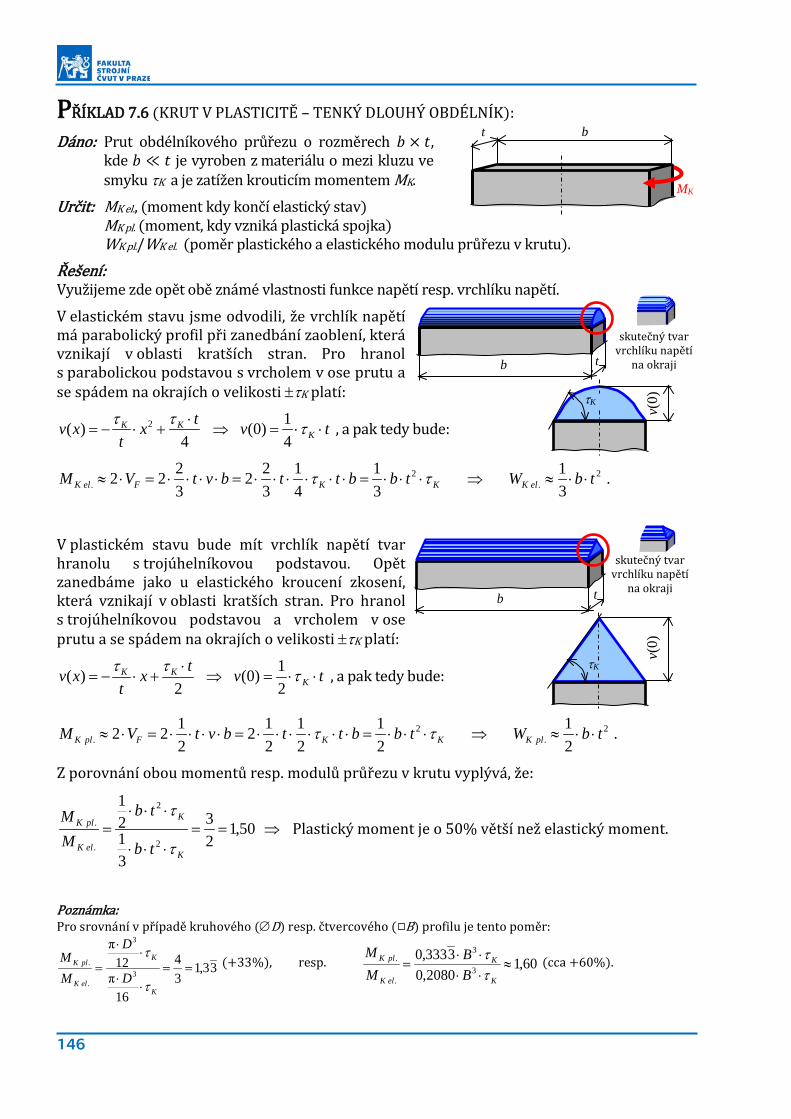
146
PŘÍKLAD 7.6 (KRUT V PLASTICITĚ – TENKÝ DLOUHÝ OBDÉLNÍK):
Dáno: Prut obdélníkového průřezu o rozměrech 𝑏𝑏 × 𝐾𝐾, kde 𝑏𝑏 ≪ 𝐾𝐾 je vyroben z materiálu o mezi kluzu ve smyku τK a je zatížen krouticím momentem MK.
Určit: MK el., (moment kdy končí elastický stav) MK pl. (moment, kdy vzniká plastická spojka) WK pl./WK el. (poměr plastického a elastického modulu průřezu v krutu).
Řešení: Využijeme zde opět obě známé vlastnosti funkce napětí resp. vrchlíku napětí.
V elastickém stavu jsme odvodili, že vrchlík napětí má parabolický profil při zanedbání zaoblení, která vznikají v oblasti kratších stran. Pro hranol s parabolickou podstavou s vrcholem v ose prutu a se spádem na okrajích o velikosti ±τK platí:
4)( 2 tx
txv KK ⋅
+⋅−=ττ ⇒ tv K ⋅⋅= τ
41)0( , a pak tedy bude:
KKFelK tbbttbvtVM ττ ⋅⋅⋅=⋅⋅⋅⋅⋅⋅=⋅⋅⋅⋅=⋅≈ 2. 3
141
322
3222 ⇒ 2
. 31 tbW elK ⋅⋅≈ .
V plastickém stavu bude mít vrchlík napětí tvar hranolu s trojúhelníkovou podstavou. Opět zanedbáme jako u elastického kroucení zkosení, která vznikají v oblasti kratších stran. Pro hranol s trojúhelníkovou podstavou a vrcholem v ose prutu a se spádem na okrajích o velikosti ±τK platí:
2)( tx
txv KK ⋅
+⋅−=ττ ⇒ tv K ⋅⋅= τ
21)0( , a pak tedy bude:
KKFplK tbbttbvtVM ττ ⋅⋅⋅=⋅⋅⋅⋅⋅⋅=⋅⋅⋅⋅=⋅≈ 2. 2
121
212
2122 ⇒ 2
. 21 tbW plK ⋅⋅≈ .
Z porovnání obou momentů resp. modulů průřezu v krutu vyplývá, že:
50,123
3121
2
2
.
. ==⋅⋅⋅
⋅⋅⋅=
K
K
elK
plK
tb
tb
MM
τ
τ ⇒ Plastický moment je o 50% větší než elastický moment.
Poznámka: Pro srovnání v případě kruhového (∅D) resp. čtvercového ( B) profilu je tento poměr:
33,134
16π
12π
3
3
.
. ==⋅
⋅
⋅⋅
=
K
K
elK
plK
D
D
MM
τ
τ (+33%), resp. 60,1
2080,03333,0
3
3
.
. ≈⋅⋅⋅⋅
=K
K
elK
plK
BB
MM
ττ (cca +60%).
τK
v(0)
MK
b t
τK v(
0)
skutečný tvar vrchlíku napětí
na okraji b t
skutečný tvar vrchlíku napětí
na okraji b t
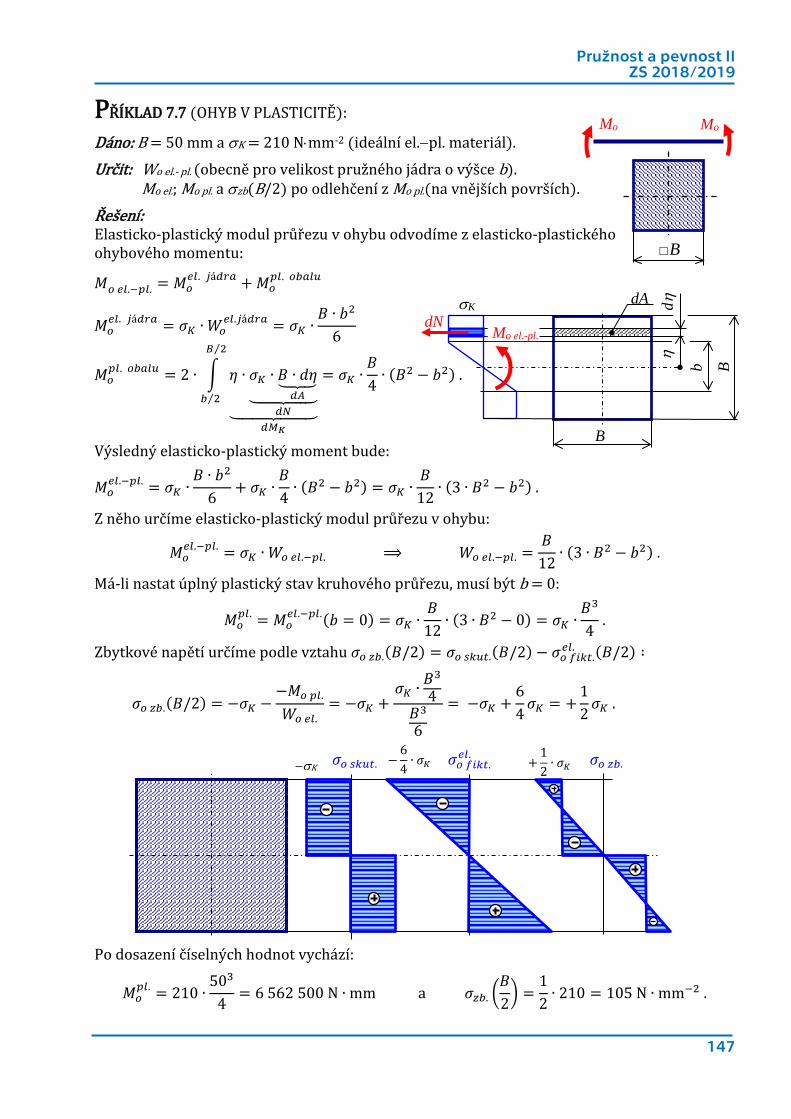
Pružnost a pevnost II ZS 2018/2019
147
PŘÍKLAD 7.7 (OHYB V PLASTICITĚ):
Dáno: B = 50 mm a σK = 210 N⋅mm-2 (ideální el.−pl. materiál).
Určit: Wo el.- pl. (obecně pro velikost pružného jádra o výšce b). Mo el.; Mo pl. a σzb(B/2) po odlehčení z Mo pl.(na vnějších površích).
Řešení: Elasticko-plastický modul průřezu v ohybu odvodíme z elasticko-plastického ohybového momentu:
𝑀𝑀𝑑𝑑 𝑐𝑐𝑑𝑑.−𝑝𝑝𝑑𝑑. = 𝑀𝑀𝑑𝑑𝑐𝑐𝑑𝑑. 𝑗𝑗á𝑑𝑑𝑜𝑜𝑚𝑚 + 𝑀𝑀𝑑𝑑
𝑝𝑝𝑑𝑑. 𝑑𝑑𝑜𝑜𝑚𝑚𝑑𝑑𝑢𝑢
𝑀𝑀𝑑𝑑𝑐𝑐𝑑𝑑. 𝑗𝑗á𝑑𝑑𝑜𝑜𝑚𝑚 = 𝜎𝜎𝐾𝐾 ∙ 𝑊𝑊𝑑𝑑
𝑐𝑐𝑑𝑑.𝑗𝑗á𝑑𝑑𝑜𝑜𝑚𝑚 = 𝜎𝜎𝐾𝐾 ∙𝐵𝐵 ∙ 𝑏𝑏2
6
𝑀𝑀𝑑𝑑𝑝𝑝𝑑𝑑. 𝑑𝑑𝑜𝑜𝑚𝑚𝑑𝑑𝑢𝑢 = 2 ∙ � 𝑑𝑑 ∙ 𝜎𝜎𝐾𝐾 ∙ 𝐵𝐵 ∙ 𝑑𝑑𝑑𝑑���
𝑑𝑑𝐴𝐴�������𝑑𝑑𝐾𝐾���������
𝑑𝑑𝑀𝑀𝐾𝐾
𝐵𝐵 2⁄
𝑜𝑜 2⁄
= 𝜎𝜎𝐾𝐾 ∙𝐵𝐵4
∙ (𝐵𝐵2 − 𝑏𝑏2) .
Výsledný elasticko-plastický moment bude:
𝑀𝑀𝑑𝑑𝑐𝑐𝑑𝑑.−𝑝𝑝𝑑𝑑. = 𝜎𝜎𝐾𝐾 ∙
𝐵𝐵 ∙ 𝑏𝑏2
6+ 𝜎𝜎𝐾𝐾 ∙
𝐵𝐵4
∙ (𝐵𝐵2 − 𝑏𝑏2) = 𝜎𝜎𝐾𝐾 ∙𝐵𝐵12
∙ (3 ∙ 𝐵𝐵2 − 𝑏𝑏2) .
Z něho určíme elasticko-plastický modul průřezu v ohybu:
𝑀𝑀𝑑𝑑𝑐𝑐𝑑𝑑.−𝑝𝑝𝑑𝑑. = 𝜎𝜎𝐾𝐾 ∙ 𝑊𝑊𝑑𝑑 𝑐𝑐𝑑𝑑.−𝑝𝑝𝑑𝑑. ⟹ 𝑊𝑊𝑑𝑑 𝑐𝑐𝑑𝑑.−𝑝𝑝𝑑𝑑. =
𝐵𝐵12
∙ (3 ∙ 𝐵𝐵2 − 𝑏𝑏2) .
Má-li nastat úplný plastický stav kruhového průřezu, musí být b = 0:
𝑀𝑀𝑑𝑑𝑝𝑝𝑑𝑑. = 𝑀𝑀𝑑𝑑
𝑐𝑐𝑑𝑑.−𝑝𝑝𝑑𝑑.(𝑏𝑏 = 0) = 𝜎𝜎𝐾𝐾 ∙𝐵𝐵12
∙ (3 ∙ 𝐵𝐵2 − 0) = 𝜎𝜎𝐾𝐾 ∙𝐵𝐵3
4 .
Zbytkové napětí určíme podle vztahu 𝜎𝜎𝑑𝑑 𝑧𝑧𝑜𝑜.(𝐵𝐵/2) = 𝜎𝜎𝑑𝑑 𝑘𝑘𝑐𝑐𝑢𝑢𝑒𝑒.(𝐵𝐵/2) − 𝜎𝜎𝑑𝑑 𝑓𝑓𝑖𝑖𝑐𝑐𝑒𝑒.𝑐𝑐𝑑𝑑. (𝐵𝐵/2) ∶
𝜎𝜎𝑑𝑑 𝑧𝑧𝑜𝑜.(𝐵𝐵/2) = −𝜎𝜎𝐾𝐾 −−𝑀𝑀𝑑𝑑 𝑝𝑝𝑑𝑑.
𝑊𝑊𝑑𝑑 𝑐𝑐𝑑𝑑.= −𝜎𝜎𝐾𝐾 +
𝜎𝜎𝐾𝐾 ∙ 𝐵𝐵3
4𝐵𝐵3
6
= −𝜎𝜎𝐾𝐾 +64
𝜎𝜎𝐾𝐾 = +12
𝜎𝜎𝐾𝐾 .
Po dosazení číselných hodnot vychází:
𝑀𝑀𝑑𝑑𝑝𝑝𝑑𝑑. = 210 ∙
503
4= 6 562 500 N ∙ mm a 𝜎𝜎𝑧𝑧𝑜𝑜. �
𝐵𝐵2
� =12
∙ 210 = 105 N ∙ mm−2 .
B
Mo Mo
σK
B
B
b
dA
dN Mo el.-pl.
η dη
𝜎𝜎𝑑𝑑 𝑘𝑘𝑐𝑐𝑢𝑢𝑒𝑒. 𝜎𝜎𝑑𝑑 𝑓𝑓𝑖𝑖𝑐𝑐𝑒𝑒.𝑐𝑐𝑑𝑑. 𝜎𝜎𝑑𝑑 𝑧𝑧𝑜𝑜. +
12
∙ 𝜎𝜎𝐾𝐾 −64
∙ 𝜎𝜎𝐾𝐾 −σK
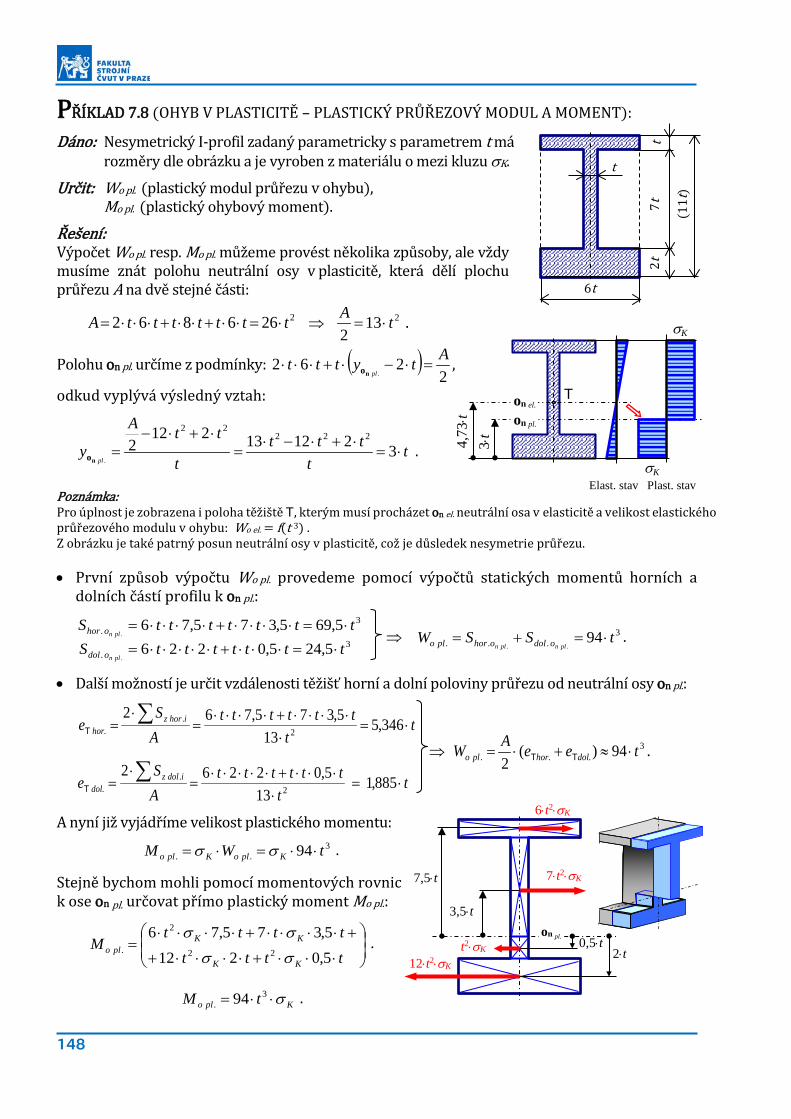
148
PŘÍKLAD 7.8 (OHYB V PLASTICITĚ – PLASTICKÝ PRŮŘEZOVÝ MODUL A MOMENT):
Dáno: Nesymetrický I-profil zadaný parametricky s parametrem t má rozměry dle obrázku a je vyroben z materiálu o mezi kluzu σK.
Určit: Wo pl. (plastický modul průřezu v ohybu), Mo pl. (plastický ohybový moment).
Řešení: Výpočet Wo pl. resp. Mo pl. můžeme provést několika způsoby, ale vždy musíme znát polohu neutrální osy v plasticitě, která dělí plochu průřezu A na dvě stejné části:
2266862 tttttttA ⋅=⋅⋅+⋅⋅+⋅⋅⋅= ⇒ 2132
tA⋅= .
Polohu on pl. určíme z podmínky: ( )2
262.
Atytttpl
=⋅−⋅+⋅⋅⋅no ,
odkud vyplývá výsledný vztah:
tt
tttt
ttA
ypl
⋅=⋅+⋅−⋅
=⋅+⋅−
= 3212132122
22222
.no .
Poznámka: Pro úplnost je zobrazena i poloha těžiště T, kterým musí procházet on el. neutrální osa v elasticitě a velikost elastického průřezového modulu v ohybu: Wo el. = f(t 3) . Z obrázku je také patrný posun neutrální osy v plasticitě, což je důsledek nesymetrie průřezu.
• První způsob výpočtu Wo pl. provedeme pomocí výpočtů statických momentů horních a dolních částí profilu k on pl.:
3.
3.
5,245,02265,695,375,76
.
.
tttttttStttttttS
pln
pln
odol
ohor
⋅=⋅⋅⋅+⋅⋅⋅⋅⋅=
⋅=⋅⋅⋅⋅+⋅⋅⋅⋅= ⇒ 3
... 94..
tSSWplnpln odolohorplo ⋅=+= .
• Další možností je určit vzdálenosti těžišť horní a dolní poloviny průřezu od neutrální osy on pl.:
tt
ttttttAS
e
tt
ttttttAS
e
idolzdol.
ihorzhor.
⋅=⋅
⋅⋅⋅+⋅⋅⋅⋅⋅=
⋅=
⋅=⋅
⋅⋅⋅⋅+⋅⋅⋅⋅=
⋅=
∑
∑
885,113
5,02262
346,513
5,375,762
2.
2.
T
T
⇒ 3. 94)(
2teeAW dol.hor.plo ⋅≈+⋅= TT .
A nyní již vyjádříme velikost plastického momentu: 3
.. 94 tWM KploKplo ⋅⋅=⋅= σσ .
Stejně bychom mohli pomocí momentových rovnic k ose on pl. určovat přímo plastický moment Mo pl.:
⋅⋅⋅+⋅⋅⋅⋅+
+⋅⋅⋅⋅+⋅⋅⋅⋅=
tttttttt
MKK
KKplo 5,0212
5,375,7622
2
. σσ
σσ .
Kplo tM σ⋅⋅= 3. 94 .
4,73
⋅t 3⋅
t
T
on pl.
on el.
σK
σK
Elast. stav Plast. stav
6t
t
t 2t
(11t
)
7t
6⋅t2⋅σK
on pl.
7⋅t2⋅σK
t2⋅σK
12⋅t2⋅σK
0,5⋅t 2⋅t
3,5⋅t
7,5⋅t
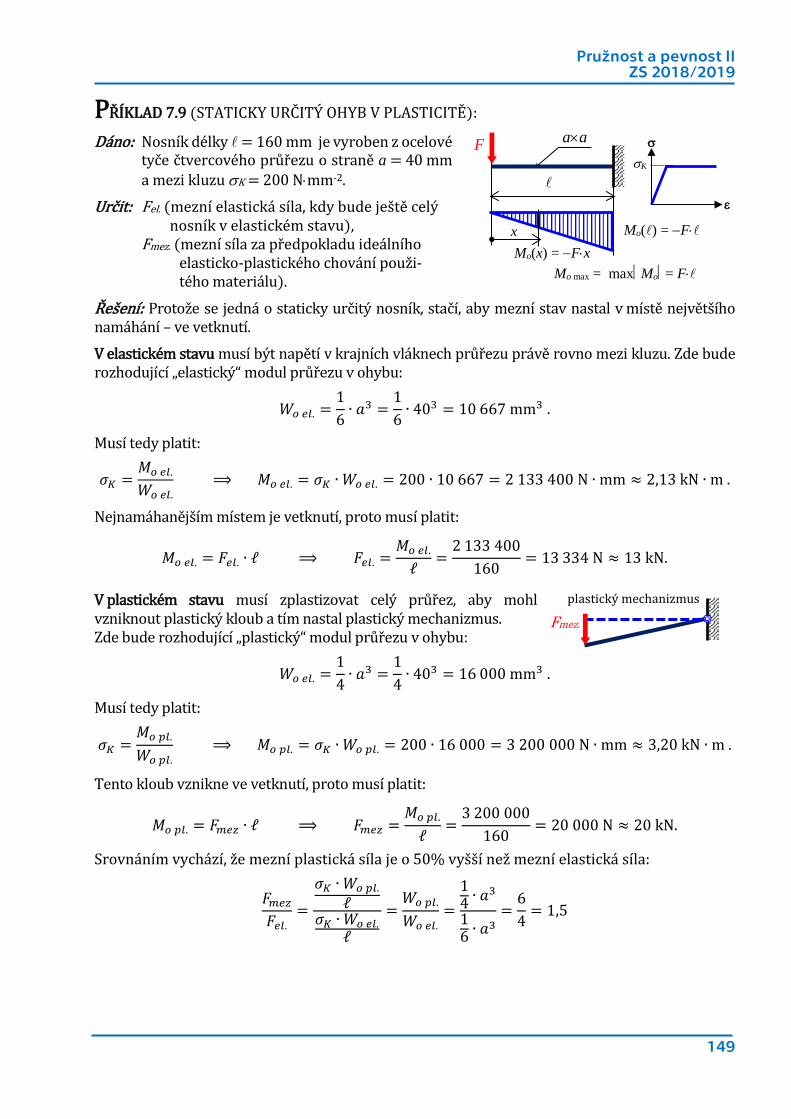
Pružnost a pevnost II ZS 2018/2019
149
PŘÍKLAD 7.9 (STATICKY URČITÝ OHYB V PLASTICITĚ):
Dáno: Nosník délky = 160 mm je vyroben z ocelové tyče čtvercového průřezu o straně a = 40 mm a mezi kluzu σK = 200 N⋅mm-2.
Určit: Fel. (mezní elastická síla, kdy bude ještě celý nosník v elastickém stavu),
Fmez. (mezní síla za předpokladu ideálního elasticko-plastického chování použi-tého materiálu).
Řešení: Protože se jedná o staticky určitý nosník, stačí, aby mezní stav nastal v místě největšího namáhání – ve vetknutí.
V elastickém stavu musí být napětí v krajních vláknech průřezu právě rovno mezi kluzu. Zde bude rozhodující „elastický“ modul průřezu v ohybu:
𝑊𝑊𝑑𝑑 𝑐𝑐𝑑𝑑. =16
∙ 𝑎𝑎3 =16
∙ 403 = 10 667 mm3 .
Musí tedy platit:
𝜎𝜎𝐾𝐾 =𝑀𝑀𝑑𝑑 𝑐𝑐𝑑𝑑.
𝑊𝑊𝑑𝑑 𝑐𝑐𝑑𝑑. ⟹ 𝑀𝑀𝑑𝑑 𝑐𝑐𝑑𝑑. = 𝜎𝜎𝐾𝐾 ∙ 𝑊𝑊𝑑𝑑 𝑐𝑐𝑑𝑑. = 200 ∙ 10 667 = 2 133 400 N ∙ mm ≈ 2,13 kN ∙ m .
Nejnamáhanějším místem je vetknutí, proto musí platit:
𝑀𝑀𝑑𝑑 𝑐𝑐𝑑𝑑. = 𝐹𝐹𝑐𝑐𝑑𝑑. ∙ ℓ ⟹ 𝐹𝐹𝑐𝑐𝑑𝑑. =𝑀𝑀𝑑𝑑 𝑐𝑐𝑑𝑑.
ℓ=
2 133 400160
= 13 334 N ≈ 13 kN.
V plastickém stavu musí zplastizovat celý průřez, aby mohl vzniknout plastický kloub a tím nastal plastický mechanizmus. Zde bude rozhodující „plastický“ modul průřezu v ohybu:
𝑊𝑊𝑑𝑑 𝑐𝑐𝑑𝑑. =14
∙ 𝑎𝑎3 =14
∙ 403 = 16 000 mm3 .
Musí tedy platit:
𝜎𝜎𝐾𝐾 =𝑀𝑀𝑑𝑑 𝑝𝑝𝑑𝑑.
𝑊𝑊𝑑𝑑 𝑝𝑝𝑑𝑑. ⟹ 𝑀𝑀𝑑𝑑 𝑝𝑝𝑑𝑑. = 𝜎𝜎𝐾𝐾 ∙ 𝑊𝑊𝑑𝑑 𝑝𝑝𝑑𝑑. = 200 ∙ 16 000 = 3 200 000 N ∙ mm ≈ 3,20 kN ∙ m .
Tento kloub vznikne ve vetknutí, proto musí platit:
𝑀𝑀𝑑𝑑 𝑝𝑝𝑑𝑑. = 𝐹𝐹𝑚𝑚𝑐𝑐𝑧𝑧 ∙ ℓ ⟹ 𝐹𝐹𝑚𝑚𝑐𝑐𝑧𝑧 =𝑀𝑀𝑑𝑑 𝑝𝑝𝑑𝑑.
ℓ=
3 200 000160
= 20 000 N ≈ 20 kN.
Srovnáním vychází, že mezní plastická síla je o 50% vyšší než mezní elastická síla:
𝐹𝐹𝑚𝑚𝑐𝑐𝑧𝑧
𝐹𝐹𝑐𝑐𝑑𝑑.=
𝜎𝜎𝐾𝐾 ∙ 𝑊𝑊𝑑𝑑 𝑝𝑝𝑑𝑑.ℓ
𝜎𝜎𝐾𝐾 ∙ 𝑊𝑊𝑑𝑑 𝑐𝑐𝑑𝑑.ℓ
=𝑊𝑊𝑑𝑑 𝑝𝑝𝑑𝑑.
𝑊𝑊𝑑𝑑 𝑐𝑐𝑑𝑑.=
14 ∙ 𝑎𝑎3
16 ∙ 𝑎𝑎3
=64
= 1,5
plastický mechanizmus
Fmez.
ε
σ σK
F a×a
Mo(x) = −F⋅x Mo() = −F⋅ x
Mo max = maxMo= F⋅
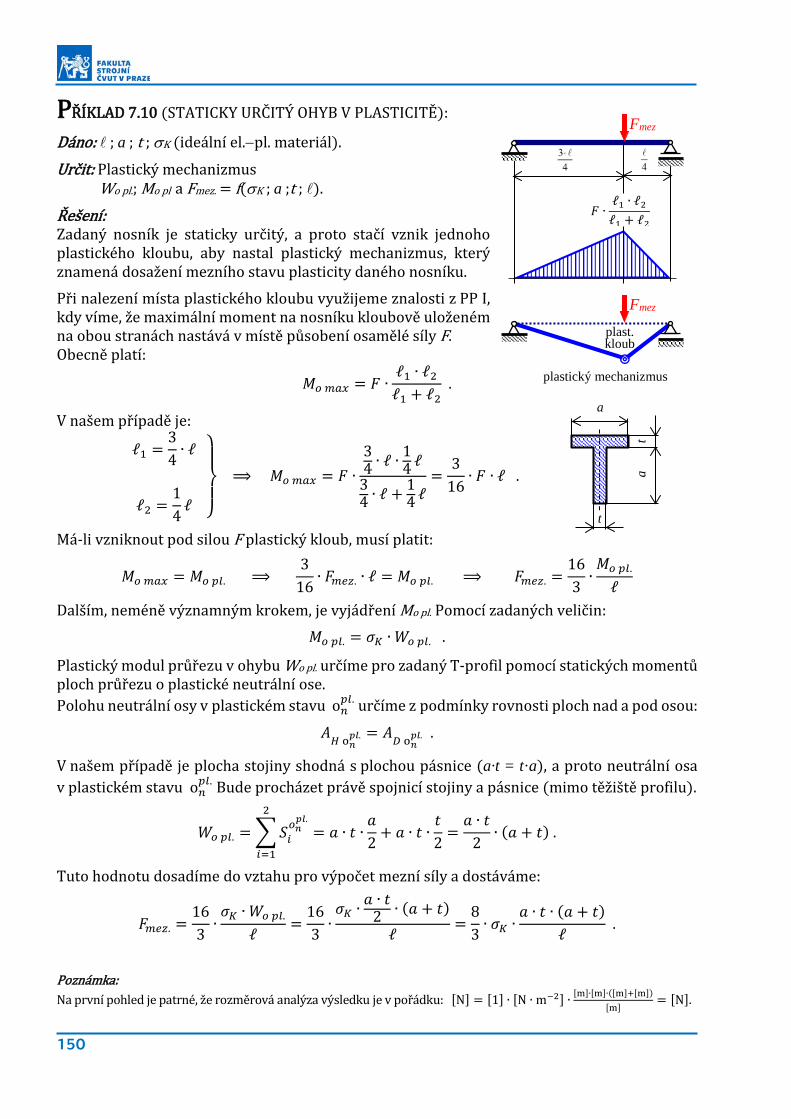
150
PŘÍKLAD 7.10 (STATICKY URČITÝ OHYB V PLASTICITĚ):
Dáno: ; a ; t ; σK (ideální el.−pl. materiál).
Určit: Plastický mechanizmus Wo pl.; Mo pl a Fmez. = f(σK ; a ;t ; ). Řešení: Zadaný nosník je staticky určitý, a proto stačí vznik jednoho plastického kloubu, aby nastal plastický mechanizmus, který znamená dosažení mezního stavu plasticity daného nosníku.
Při nalezení místa plastického kloubu využijeme znalosti z PP I, kdy víme, že maximální moment na nosníku kloubově uloženém na obou stranách nastává v místě působení osamělé síly F. Obecně platí:
𝑀𝑀𝑑𝑑 𝑚𝑚𝑚𝑚𝑚𝑚 = 𝐹𝐹 ∙ℓ1 ∙ ℓ2
ℓ1 + ℓ2 .
V našem případě je:
ℓ1 =34
∙ ℓ
ℓ2 =14
ℓ
⎭⎪⎬
⎪⎫
⟹ 𝑀𝑀𝑑𝑑 𝑚𝑚𝑚𝑚𝑚𝑚 = 𝐹𝐹 ∙34 ∙ ℓ ∙ 1
4 ℓ34 ∙ ℓ + 1
4 ℓ=
316
∙ 𝐹𝐹 ∙ ℓ .
Má-li vzniknout pod silou F plastický kloub, musí platit:
𝑀𝑀𝑑𝑑 𝑚𝑚𝑚𝑚𝑚𝑚 = 𝑀𝑀𝑑𝑑 𝑝𝑝𝑑𝑑. ⟹ 3
16∙ 𝐹𝐹𝑚𝑚𝑐𝑐𝑧𝑧. ∙ ℓ = 𝑀𝑀𝑑𝑑 𝑝𝑝𝑑𝑑. ⟹ 𝐹𝐹𝑚𝑚𝑐𝑐𝑧𝑧. =
163
∙𝑀𝑀𝑑𝑑 𝑝𝑝𝑑𝑑.
ℓ
Dalším, neméně významným krokem, je vyjádření Mo pl. Pomocí zadaných veličin: 𝑀𝑀𝑑𝑑 𝑝𝑝𝑑𝑑. = 𝜎𝜎𝐾𝐾 ∙ 𝑊𝑊𝑑𝑑 𝑝𝑝𝑑𝑑. .
Plastický modul průřezu v ohybu Wo pl. určíme pro zadaný T-profil pomocí statických momentů ploch průřezu o plastické neutrální ose. Polohu neutrální osy v plastickém stavu o𝑑𝑑
𝑝𝑝𝑑𝑑. určíme z podmínky rovnosti ploch nad a pod osou:
𝐴𝐴𝐾𝐾 o𝑛𝑛𝑝𝑝𝑝𝑝. = 𝐴𝐴𝐷𝐷 o𝑛𝑛
𝑝𝑝𝑝𝑝. .
V našem případě je plocha stojiny shodná s plochou pásnice (a·t = t·a), a proto neutrální osa v plastickém stavu o𝑑𝑑
𝑝𝑝𝑑𝑑. Bude procházet právě spojnicí stojiny a pásnice (mimo těžiště profilu).
𝑊𝑊𝑑𝑑 𝑝𝑝𝑑𝑑. = � 𝑆𝑆𝑖𝑖𝑑𝑑𝑛𝑛
𝑝𝑝𝑝𝑝.2
𝑖𝑖=1
= 𝑎𝑎 ∙ 𝐾𝐾 ∙𝑎𝑎2
+ 𝑎𝑎 ∙ 𝐾𝐾 ∙𝐾𝐾2
=𝑎𝑎 ∙ 𝐾𝐾
2∙ (𝑎𝑎 + 𝐾𝐾) .
Tuto hodnotu dosadíme do vztahu pro výpočet mezní síly a dostáváme:
𝐹𝐹𝑚𝑚𝑐𝑐𝑧𝑧. =163
∙𝜎𝜎𝐾𝐾 ∙ 𝑊𝑊𝑑𝑑 𝑝𝑝𝑑𝑑.
ℓ=
163
∙𝜎𝜎𝐾𝐾 ∙ 𝑎𝑎 ∙ 𝐾𝐾
2 ∙ (𝑎𝑎 + 𝐾𝐾)ℓ
=83
∙ 𝜎𝜎𝐾𝐾 ∙𝑎𝑎 ∙ 𝐾𝐾 ∙ (𝑎𝑎 + 𝐾𝐾)
ℓ .
Poznámka: Na první pohled je patrné, že rozměrová analýza výsledku je v pořádku: [N] = [1] ∙ [N ∙ m−2] ∙ [m]∙[m]∙([m]+[m])
[m]= [N].
Fmez
a t
a
t
𝐹𝐹 ∙ℓ1 ∙ ℓ2
ℓ1 + ℓ2
Fmez
plast. kloub
plastický mechanizmus
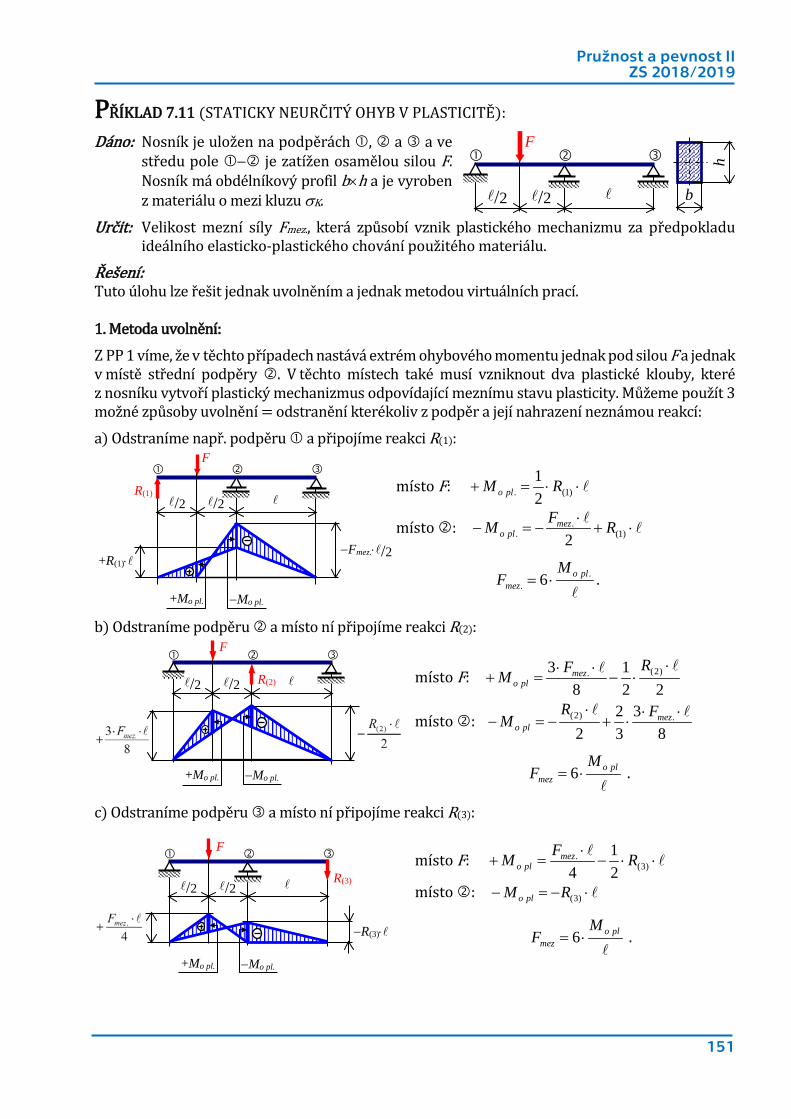
Pružnost a pevnost II ZS 2018/2019
151
PŘÍKLAD 7.11 (STATICKY NEURČITÝ OHYB V PLASTICITĚ):
Dáno: Nosník je uložen na podpěrách , a a ve středu pole − je zatížen osamělou silou F. Nosník má obdélníkový profil b×h a je vyroben z materiálu o mezi kluzu σK.
Určit: Velikost mezní síly Fmez., která způsobí vznik plastického mechanizmu za předpokladu ideálního elasticko-plastického chování použitého materiálu.
Řešení: Tuto úlohu lze řešit jednak uvolněním a jednak metodou virtuálních prací. 1. Metoda uvolnění:
Z PP 1 víme, že v těchto případech nastává extrém ohybového momentu jednak pod silou F a jednak v místě střední podpěry . V těchto místech také musí vzniknout dva plastické klouby, které z nosníku vytvoří plastický mechanizmus odpovídající meznímu stavu plasticity. Můžeme použít 3 možné způsoby uvolnění = odstranění kterékoliv z podpěr a její nahrazení neznámou reakcí:
a) Odstraníme např. podpěru a připojíme reakci R(1):
místo F: ⋅⋅=+ )1(. 21 RM plo
místo :
⋅+⋅
−=− )1(.
. 2RFM mez
plo
.. 6 plo
mez
MF ⋅= .
b) Odstraníme podpěru a místo ní připojíme reakci R(2):
místo F: 22
18
3 )2(. ⋅⋅−
⋅⋅=+
RFM mezplo
místo : 8
332
2.)2( ⋅⋅
⋅+⋅
−=− mezplo
FRM
plomez
MF ⋅= 6 .
c) Odstraníme podpěru a místo ní připojíme reakci R(3):
místo F:
⋅⋅−⋅
=+ )3(.
21
4RFM mez
plo
místo : ⋅−=− )3(RM plo
plomez
MF ⋅= 6 .
/2 /2
F
h
b
/2 /2
F
R(1)
+Mo pl. −Mo pl.
−Fmez.⋅/2 +R(1)⋅
/2 /2
F
R(3)
+Mo pl. −Mo pl.
−R(3)⋅
/2 /2
F
R(2)
+Mo pl. −Mo pl.
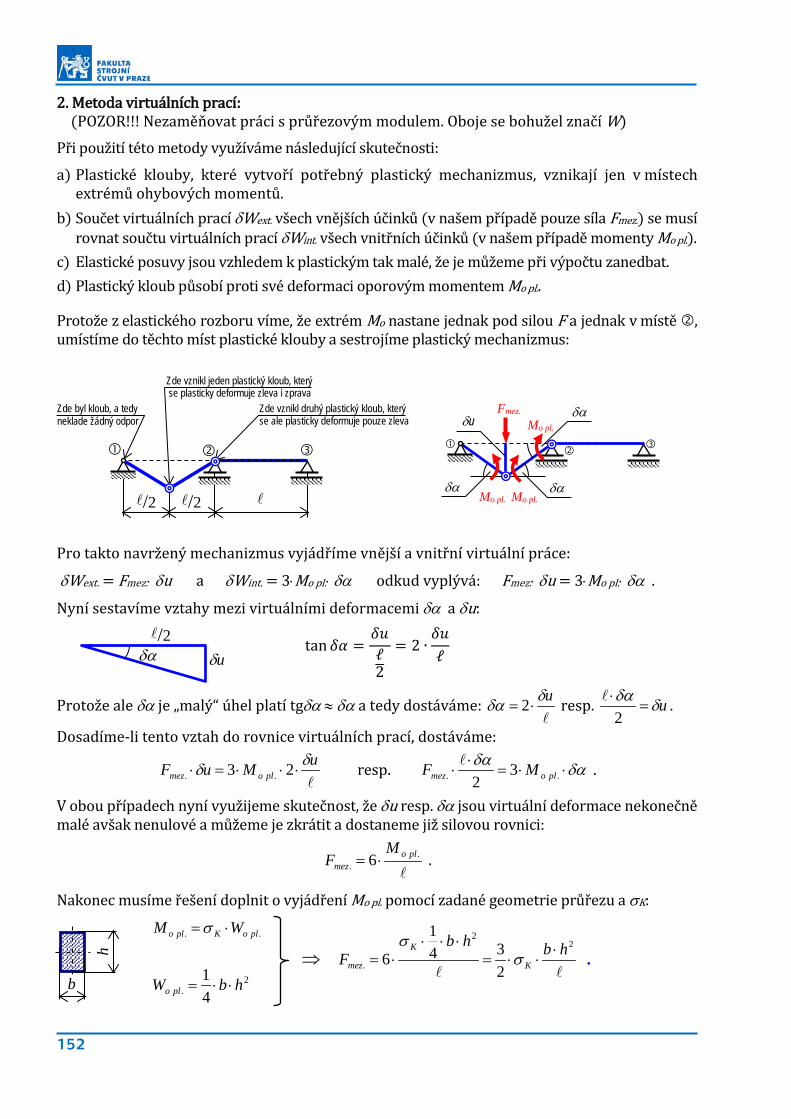
152
δα δu
/2
2. Metoda virtuálních prací: (POZOR!!! Nezaměňovat práci s průřezovým modulem. Oboje se bohužel značí W)
Při použití této metody využíváme následující skutečnosti:
a) Plastické klouby, které vytvoří potřebný plastický mechanizmus, vznikají jen v místech extrémů ohybových momentů.
b) Součet virtuálních prací δWext. všech vnějších účinků (v našem případě pouze síla Fmez.) se musí rovnat součtu virtuálních prací δWint. všech vnitřních účinků (v našem případě momenty Mo pl.).
c) Elastické posuvy jsou vzhledem k plastickým tak malé, že je můžeme při výpočtu zanedbat. d) Plastický kloub působí proti své deformaci oporovým momentem Mo pl..
Protože z elastického rozboru víme, že extrém Mo nastane jednak pod silou F a jednak v místě , umístíme do těchto míst plastické klouby a sestrojíme plastický mechanizmus:
Pro takto navržený mechanizmus vyjádříme vnější a vnitřní virtuální práce:
δWext. = Fmez.⋅ δu a δWint. = 3⋅Mo pl.⋅ δα odkud vyplývá: Fmez.⋅ δu = 3⋅Mo pl.⋅ δα . Nyní sestavíme vztahy mezi virtuálními deformacemi δα a δu:
tan 𝛿𝛿𝛼𝛼 =𝛿𝛿𝑢𝑢ℓ2
= 2 ∙𝛿𝛿𝑢𝑢ℓ
Protože ale δα je „malý“ úhel platí tgδα ≈ δα a tedy dostáváme:
uδδα ⋅= 2 resp. uδδα=
⋅2
.
Dosadíme-li tento vztah do rovnice virtuálních prací, dostáváme:
uMuF plomezδδ ⋅⋅⋅=⋅ 23 .. resp. δαδα
⋅⋅=⋅
⋅ .. 32 plomez MF .
V obou případech nyní využijeme skutečnost, že δu resp. δα jsou virtuální deformace nekonečně malé avšak nenulové a můžeme je zkrátit a dostaneme již silovou rovnici:
.. 6 plo
mez
MF ⋅= .
Nakonec musíme řešení doplnit o vyjádření Mo pl. pomocí zadané geometrie průřezu a σK:
.. ploKplo WM ⋅= σ
2. 4
1 hbW plo ⋅⋅= ⇒
22
. 234
1
6 hbhbF K
K
mez⋅
⋅⋅=⋅⋅⋅
⋅= σσ
.
δα
Fmez.
δα
δα δu
Mo pl. Mo pl.
Mo pl.
/2 /2
Zde byl kloub, a tedy neklade žádný odpor
Zde vznikl jeden plastický kloub, který se plasticky deformuje zleva i zprava
Zde vznikl druhý plastický kloub, který se ale plasticky deformuje pouze zleva
h
b
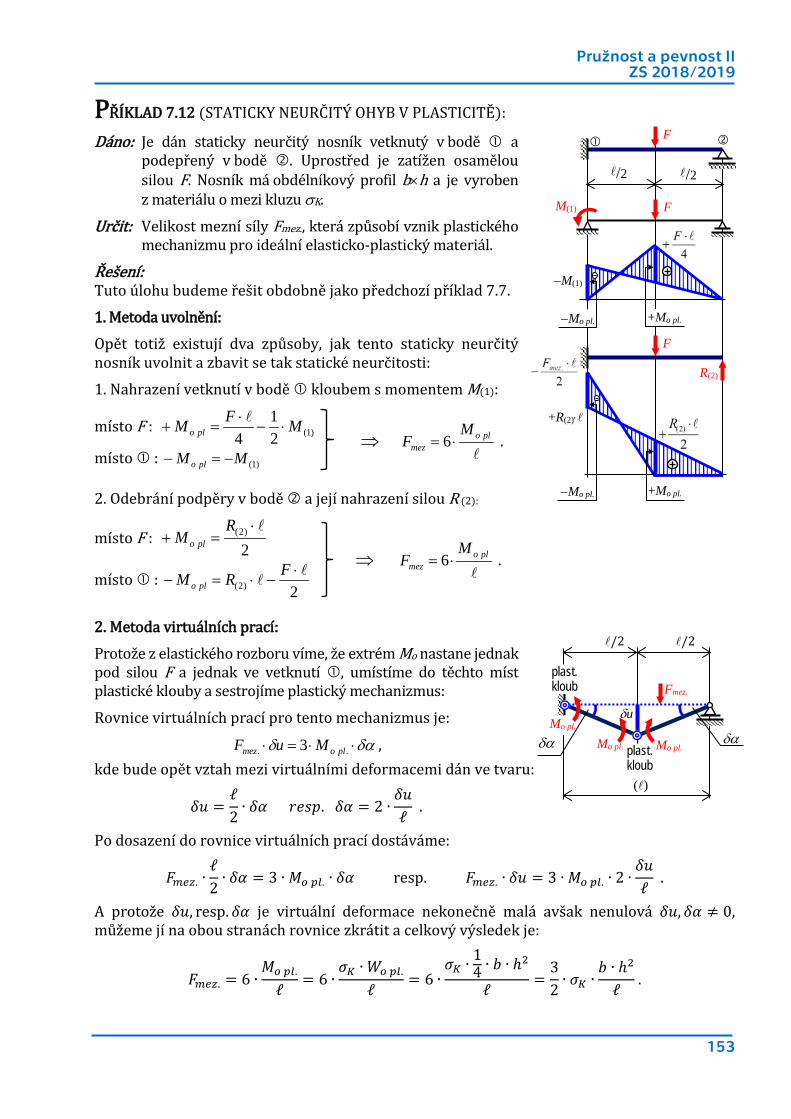
Pružnost a pevnost II ZS 2018/2019
153
PŘÍKLAD 7.12 (STATICKY NEURČITÝ OHYB V PLASTICITĚ):
Dáno: Je dán staticky neurčitý nosník vetknutý v bodě a podepřený v bodě . Uprostřed je zatížen osamělou silou F. Nosník má obdélníkový profil b×h a je vyroben z materiálu o mezi kluzu σK.
Určit: Velikost mezní síly Fmez., která způsobí vznik plastického mechanizmu pro ideální elasticko-plastický materiál.
Řešení: Tuto úlohu budeme řešit obdobně jako předchozí příklad 7.7.
1. Metoda uvolnění:
Opět totiž existují dva způsoby, jak tento staticky neurčitý nosník uvolnit a zbavit se tak statické neurčitosti:
1. Nahrazení vetknutí v bodě kloubem s momentem M(1):
místo F : )1(21
4MFM plo ⋅−
⋅=+
místo : )1(MM plo −=−
2. Odebrání podpěry v bodě a její nahrazení silou R (2):
místo F : 2)2( ⋅
=+R
M plo
místo : 2)2(
⋅−⋅=−
FRM plo
2. Metoda virtuálních prací:
Protože z elastického rozboru víme, že extrém Mo nastane jednak pod silou F a jednak ve vetknutí , umístíme do těchto míst plastické klouby a sestrojíme plastický mechanizmus:
Rovnice virtuálních prací pro tento mechanizmus je:
δαδ ⋅⋅=⋅ .. 3 plomez MuF , kde bude opět vztah mezi virtuálními deformacemi dán ve tvaru:
𝛿𝛿𝑢𝑢 =ℓ2
∙ 𝛿𝛿𝛼𝛼 𝑟𝑟𝑟𝑟𝑑𝑑𝑝𝑝. 𝛿𝛿𝛼𝛼 = 2 ∙𝛿𝛿𝑢𝑢ℓ
.
Po dosazení do rovnice virtuálních prací dostáváme:
𝐹𝐹𝑚𝑚𝑐𝑐𝑧𝑧. ∙ℓ2
∙ 𝛿𝛿𝛼𝛼 = 3 ∙ 𝑀𝑀𝑑𝑑 𝑝𝑝𝑑𝑑. ∙ 𝛿𝛿𝛼𝛼 resp. 𝐹𝐹𝑚𝑚𝑐𝑐𝑧𝑧. ∙ 𝛿𝛿𝑢𝑢 = 3 ∙ 𝑀𝑀𝑑𝑑 𝑝𝑝𝑑𝑑. ∙ 2 ∙𝛿𝛿𝑢𝑢ℓ
.
A protože 𝛿𝛿𝑢𝑢, resp. 𝛿𝛿𝛼𝛼 je virtuální deformace nekonečně malá avšak nenulová 𝛿𝛿𝑢𝑢, 𝛿𝛿𝛼𝛼 ≠ 0, můžeme jí na obou stranách rovnice zkrátit a celkový výsledek je:
𝐹𝐹𝑚𝑚𝑐𝑐𝑧𝑧. = 6 ∙𝑀𝑀𝑑𝑑 𝑝𝑝𝑑𝑑.
ℓ= 6 ∙
𝜎𝜎𝐾𝐾 ∙ 𝑊𝑊𝑑𝑑 𝑝𝑝𝑑𝑑.
ℓ= 6 ∙
𝜎𝜎𝐾𝐾 ∙ 14 ∙ 𝑏𝑏 ∙ ℎ2
ℓ=
32
∙ 𝜎𝜎𝐾𝐾 ∙𝑏𝑏 ∙ ℎ2
ℓ .
⇒
plomez
MF ⋅= 6 .
⇒
plomez
MF ⋅= 6 .
/2 /2
F
+Mo pl.
−M(1)
−Mo pl.
F M(1)
F
R(2)
+Mo pl. −Mo pl.
+R(2)⋅
Mo pl.
Fmez.
plast. kloub
plast. kloub
Mo pl.
Mo pl.
()
/2
/2
δu
δα

154
PŘÍKLAD 7.13 (STATICKY NEURČITÝ OHYB V PLASTICITĚ):
Dáno: Je dán staticky neurčitý nosník vetknutý v bodě a podepřený v bodě . V obecném místě je nosník zatížen osamělou silou F. Celý nosník je vyroben z materiálu o mezi kluzu σK.
Určit: Polohu na nosníku, kdy bude nejmenší velikost mezní síly Fmez., která způsobí vznik plastického mechanizmu pro ideální elasticko-plastický materiál.
Řešení: Pokud bychom řešili zcela obecnou polohu síly F na nosníku popsanou souřadnicí x zprava (od kloubové podpěry směrem k vetknutí), dostáváme rovnici virtuálních prací:
δαδαδ ⋅+⋅−
⋅⋅=⋅ ... 2 ploplomez Mx
xMuF
.
Geometrický vztah mezi virtuálními deformacemi bude:
𝛿𝛿𝑢𝑢 = 𝑚𝑚 ∙ 𝛿𝛿𝛼𝛼 resp. 𝛿𝛿𝑢𝑢 = (ℓ − 𝑚𝑚) ∙ 𝛿𝛿𝛽𝛽 . Po dosazení dostáváme výslednou rovnici ve tvaru:
δαδα ⋅⋅=⋅−+
⋅ xFxxM mezplo ..
⇒
.2
2
.plo
mez
MxxxF ⋅
−⋅⋅+
= .
Průběh této funkce je naznačen pod obrázkem. Minimum dosahuje tato funkce v bodě ⋅≈⋅−= 4142,0)12(x a jeho hodnota je:
..min. 82843,5
4232 ploplo
mez
MMF ⋅≈⋅
−⋅= .
Poznámky: • Dosadíme-li do obecné rovnice původní hodnotu x = /2, dostáváme:
...
2
2
.2
2
. 6
4123
41
21
211
22
2 ploploploplomez
MMMMF ⋅=⋅=⋅
−⋅
+⋅
=⋅
−⋅
⋅+=
.
• Dosadíme-li do obecné rovnice původní hodnotu x = /3, dostáváme:
...
2
2
.2
2
. 6
9234
91
31
311
33
3 ploploploplomez
MMMMF ⋅=⋅=⋅
−⋅
+⋅
=⋅
−⋅
⋅+=
.
Stejně tak bychom našli vzhledem ke tvaru funkce Fmez.(x) i další dvojice bodů, ve kterých vychází mezní síla také stejná vyjádřená pomocí součinitele ξ ∈ ⟨5,82843 ; +∞):
..
plomez
MF ⋅= ξ .
• Nezapomeňte, že celý příklad končí až vyjádřením mezní síly Fmez. jako funkce zadaných parametrů. Máme-li tedy zadán konkrétní průřez nosníku, musíme ještě vyjádřit jeho plastický moment Mo pl. jako funkci meze kluzu σK a plastického modulu průřezu v ohybu Wo pl. resp. zadaných rozměrů řešeného průřezu:
..
ploKmez
WF
⋅⋅=σ
ξ .
Mo pl.
Fmez.
plast. kloub
plast. kloub
Mo pl. Mo pl.
()
x – x
δu
20 18 16 14 12 10 8 6 4 2 0
0,4142⋅
5,82843
𝛿𝛿𝛽𝛽 =𝑚𝑚
(ℓ − 𝑚𝑚) ∙ 𝛿𝛿𝛼𝛼
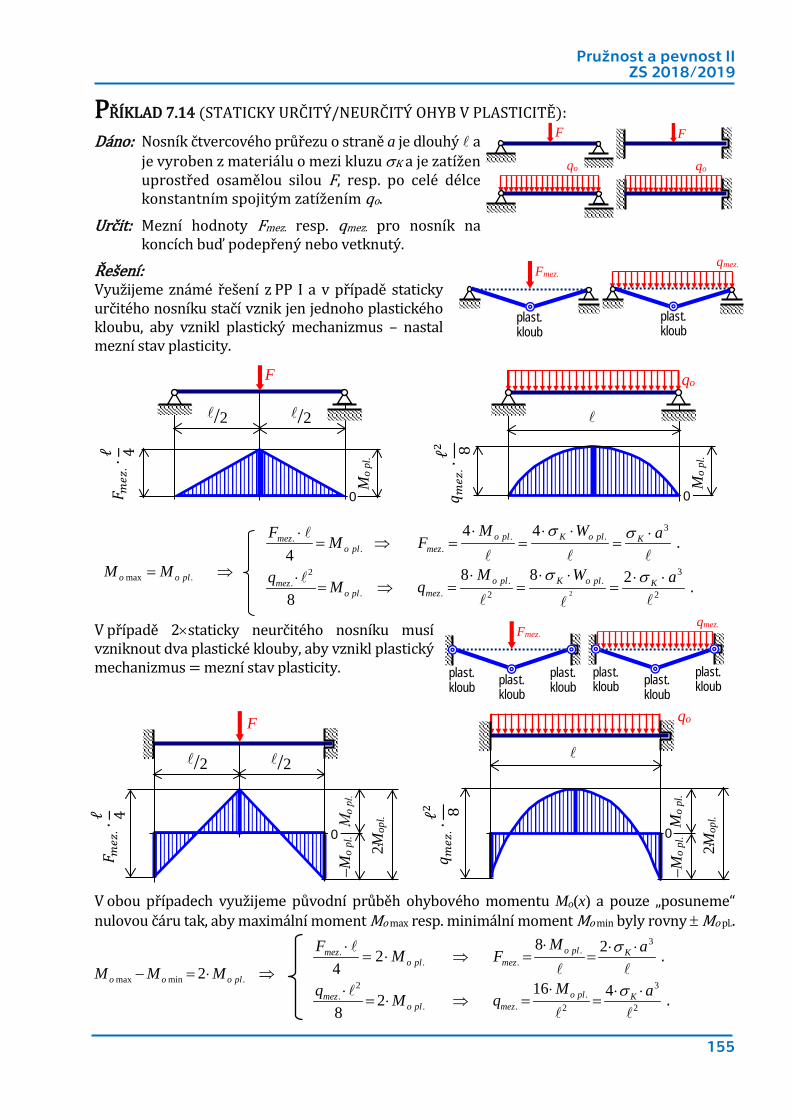
Pružnost a pevnost II ZS 2018/2019
155
PŘÍKLAD 7.14 (STATICKY URČITÝ/NEURČITÝ OHYB V PLASTICITĚ):
Dáno: Nosník čtvercového průřezu o straně a je dlouhý a je vyroben z materiálu o mezi kluzu σK a je zatížen uprostřed osamělou silou F, resp. po celé délce konstantním spojitým zatížením qo.
Určit: Mezní hodnoty Fmez. resp. qmez. pro nosník na koncích buď podepřený nebo vetknutý.
Řešení: Využijeme známé řešení z PP I a v případě staticky určitého nosníku stačí vznik jen jednoho plastického kloubu, aby vznikl plastický mechanizmus – nastal mezní stav plasticity.
..
4 plomez MF
=⋅ ⇒
3..
.
44 aWMF KploKplo
mez⋅
=⋅⋅
=⋅
=σσ
.
.
2.
8 plomez Mq
=⋅ ⇒ 2
3.
2.
.288
2
aWMq KploKplo
mez⋅⋅
=⋅⋅
=⋅
=σσ
.
V případě 2×staticky neurčitého nosníku musí vzniknout dva plastické klouby, aby vznikl plastický mechanizmus = mezní stav plasticity. V obou případech využijeme původní průběh ohybového momentu Mo(x) a pouze „posuneme“ nulovou čáru tak, aby maximální moment Mo max resp. minimální moment Mo min byly rovny ± Mo pl..
.. 2
4 plomez MF
⋅=⋅ ⇒
3.
.28 aM
F Kplomez
⋅⋅=
⋅=
σ .
.
2. 28 plo
mez Mq⋅=
⋅ ⇒ 2
3
2.
.416
aMq Kplo
mez⋅⋅
=⋅
=σ .
.minmax 2 plooo MMM ⋅=− ⇒
.max ploo MM = ⇒
qo
𝑞𝑞 𝑚𝑚𝑐𝑐𝑧𝑧
.∙ℓ2 8
0
Mo
pl.
/2 /2
F
𝐹𝐹 𝑚𝑚𝑐𝑐𝑧𝑧
.∙ℓ 4
0
Mo
pl.
F F
qo qo
Fmez.
plast. kloub
qmez.
plast. kloub
qmez.
plast. kloub
plast. kloub
plast. kloub
Fmez.
plast. kloub
plast. kloub
plast. kloub
0
/2 /2
F
–Mo
pl.
2⋅M
opl.
𝐹𝐹 𝑚𝑚𝑐𝑐𝑧𝑧
.∙ℓ 4
qo
–Mo
pl.
Mo
pl.
0
2⋅Mop
l.
𝑞𝑞 𝑚𝑚𝑐𝑐𝑧𝑧
.∙ℓ2 8
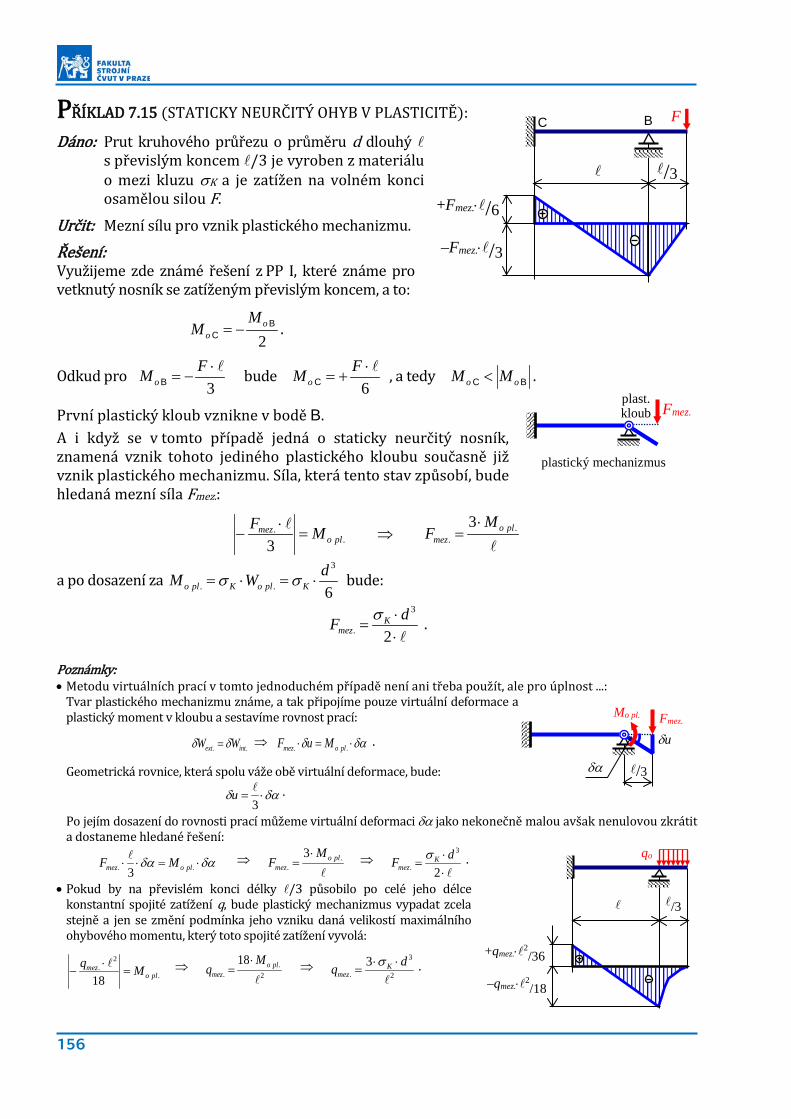
156
PŘÍKLAD 7.15 (STATICKY NEURČITÝ OHYB V PLASTICITĚ):
Dáno: Prut kruhového průřezu o průměru d dlouhý s převislým koncem /3 je vyroben z materiálu o mezi kluzu σK a je zatížen na volném konci osamělou silou F.
Určit: Mezní sílu pro vznik plastického mechanizmu.
Řešení: Využijeme zde známé řešení z PP I, které známe pro vetknutý nosník se zatíženým převislým koncem, a to:
2B
Co
o
MM −= .
Odkud pro 3
⋅−=
FMo B bude 6
⋅+=
FMo C , a tedy BC oo MM < .
První plastický kloub vznikne v bodě B. A i když se v tomto případě jedná o staticky neurčitý nosník, znamená vznik tohoto jediného plastického kloubu současně již vznik plastického mechanizmu. Síla, která tento stav způsobí, bude hledaná mezní síla Fmez.:
..
3 plomez MF
=⋅
− ⇒
..
3 plomez
MF
⋅=
a po dosazení za 6
3
..dWM KploKplo ⋅=⋅= σσ bude:
⋅⋅
=2
3
.dF K
mezσ .
Poznámky: • Metodu virtuálních prací v tomto jednoduchém případě není ani třeba použít, ale pro úplnost ...:
Tvar plastického mechanizmu známe, a tak připojíme pouze virtuální deformace a plastický moment v kloubu a sestavíme rovnost prací:
int.ext WW δδ =. ⇒ δαδ ⋅=⋅ .. plomez MuF .
Geometrická rovnice, která spolu váže obě virtuální deformace, bude:
δαδ ⋅=3u .
Po jejím dosazení do rovnosti prací můžeme virtuální deformaci δα jako nekonečně malou avšak nenulovou zkrátit a dostaneme hledané řešení:
δαδα ⋅=⋅⋅ .. 3 plomez MF ⇒
..
3 plomez
MF
⋅= ⇒
⋅⋅
=2
3
.dF K
mezσ .
• Pokud by na převislém konci délky /3 působilo po celé jeho délce konstantní spojité zatížení q, bude plastický mechanizmus vypadat zcela stejně a jen se změní podmínka jeho vzniku daná velikostí maximálního ohybového momentu, který toto spojité zatížení vyvolá:
.
2.
18 plomez Mq
=⋅
− ⇒
2.
.
18
plomez
Mq
⋅= ⇒
2
3
.3
dq Kmez
⋅⋅=
σ .
plastický mechanizmus
plast. kloub Fmez.
+Fmez.⋅/6
F
/3
–Fmez.⋅/3
B C
δα
Fmez.
δu
/3
Mo pl.
+qmez.⋅2/36
qo
/3
–qmez.⋅2/18
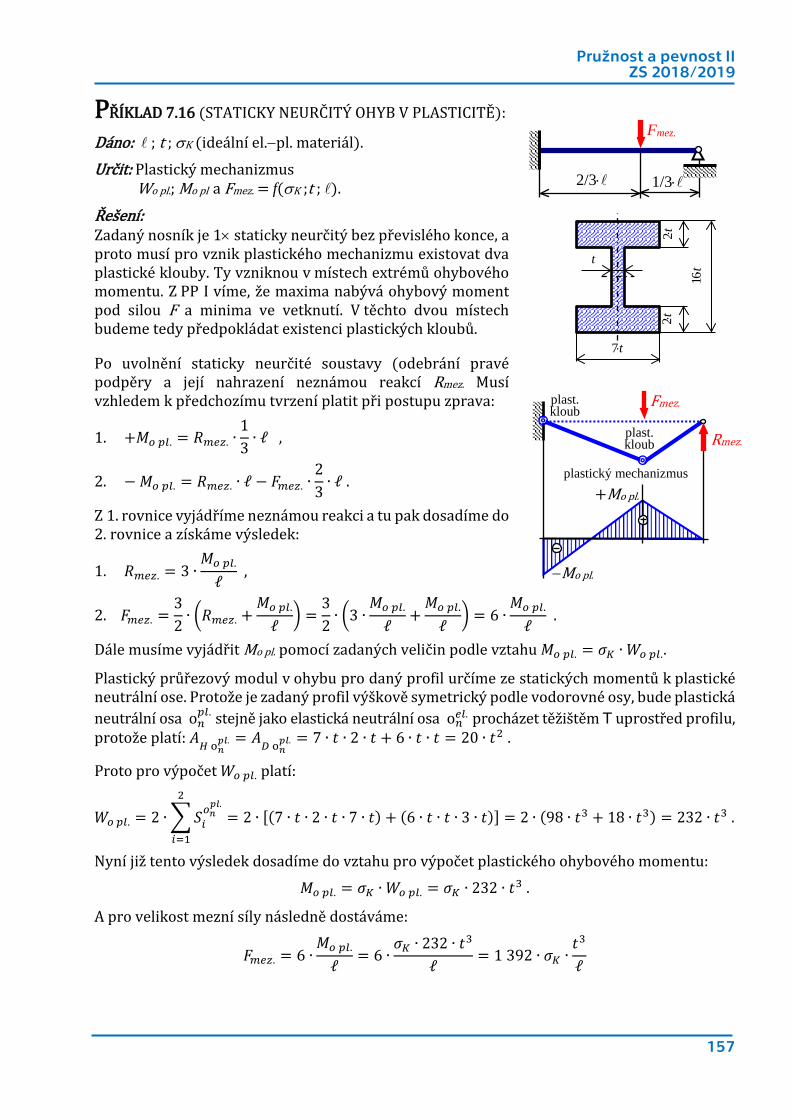
Pružnost a pevnost II ZS 2018/2019
157
PŘÍKLAD 7.16 (STATICKY NEURČITÝ OHYB V PLASTICITĚ):
Dáno: ; t ; σK (ideální el.−pl. materiál).
Určit: Plastický mechanizmus Wo pl.; Mo pl a Fmez. = f(σK ;t ; ). Řešení: Zadaný nosník je 1× staticky neurčitý bez převislého konce, a proto musí pro vznik plastického mechanizmu existovat dva plastické klouby. Ty vzniknou v místech extrémů ohybového momentu. Z PP I víme, že maxima nabývá ohybový moment pod silou F a minima ve vetknutí. V těchto dvou místech budeme tedy předpokládat existenci plastických kloubů.
Po uvolnění staticky neurčité soustavy (odebrání pravé podpěry a její nahrazení neznámou reakcí Rmez. Musí vzhledem k předchozímu tvrzení platit při postupu zprava:
1. +𝑀𝑀𝑑𝑑 𝑝𝑝𝑑𝑑. = 𝑅𝑅𝑚𝑚𝑐𝑐𝑧𝑧. ∙13
∙ ℓ ,
2. − 𝑀𝑀𝑑𝑑 𝑝𝑝𝑑𝑑. = 𝑅𝑅𝑚𝑚𝑐𝑐𝑧𝑧. ∙ ℓ − 𝐹𝐹𝑚𝑚𝑐𝑐𝑧𝑧. ∙23
∙ ℓ .
Z 1. rovnice vyjádříme neznámou reakci a tu pak dosadíme do 2. rovnice a získáme výsledek:
1. 𝑅𝑅𝑚𝑚𝑐𝑐𝑧𝑧. = 3 ∙𝑀𝑀𝑑𝑑 𝑝𝑝𝑑𝑑.
ℓ ,
2. 𝐹𝐹𝑚𝑚𝑐𝑐𝑧𝑧. =32
∙ �𝑅𝑅𝑚𝑚𝑐𝑐𝑧𝑧. +𝑀𝑀𝑑𝑑 𝑝𝑝𝑑𝑑.
ℓ� =
32
∙ �3 ∙𝑀𝑀𝑑𝑑 𝑝𝑝𝑑𝑑.
ℓ+
𝑀𝑀𝑑𝑑 𝑝𝑝𝑑𝑑.
ℓ� = 6 ∙
𝑀𝑀𝑑𝑑 𝑝𝑝𝑑𝑑.
ℓ .
Dále musíme vyjádřit Mo pl. pomocí zadaných veličin podle vztahu 𝑀𝑀𝑑𝑑 𝑝𝑝𝑑𝑑. = 𝜎𝜎𝐾𝐾 ∙ 𝑊𝑊𝑑𝑑 𝑝𝑝𝑑𝑑..
Plastický průřezový modul v ohybu pro daný profil určíme ze statických momentů k plastické neutrální ose. Protože je zadaný profil výškově symetrický podle vodorovné osy, bude plastická neutrální osa o𝑑𝑑
𝑝𝑝𝑑𝑑. stejně jako elastická neutrální osa o𝑑𝑑𝑐𝑐𝑑𝑑. procházet těžištěm T uprostřed profilu,
protože platí: 𝐴𝐴𝐾𝐾 o𝑛𝑛𝑝𝑝𝑝𝑝. = 𝐴𝐴𝐷𝐷 o𝑛𝑛
𝑝𝑝𝑝𝑝. = 7 ∙ 𝐾𝐾 ∙ 2 ∙ 𝐾𝐾 + 6 ∙ 𝐾𝐾 ∙ 𝐾𝐾 = 20 ∙ 𝐾𝐾2 .
Proto pro výpočet 𝑊𝑊𝑑𝑑 𝑝𝑝𝑑𝑑. platí:
𝑊𝑊𝑑𝑑 𝑝𝑝𝑑𝑑. = 2 ∙ � 𝑆𝑆𝑖𝑖𝑑𝑑𝑛𝑛
𝑝𝑝𝑝𝑝.2
𝑖𝑖=1
= 2 ∙ [(7 ∙ 𝐾𝐾 ∙ 2 ∙ 𝐾𝐾 ∙ 7 ∙ 𝐾𝐾) + (6 ∙ 𝐾𝐾 ∙ 𝐾𝐾 ∙ 3 ∙ 𝐾𝐾)] = 2 ∙ (98 ∙ 𝐾𝐾3 + 18 ∙ 𝐾𝐾3) = 232 ∙ 𝐾𝐾3 .
Nyní již tento výsledek dosadíme do vztahu pro výpočet plastického ohybového momentu:
𝑀𝑀𝑑𝑑 𝑝𝑝𝑑𝑑. = 𝜎𝜎𝐾𝐾 ∙ 𝑊𝑊𝑑𝑑 𝑝𝑝𝑑𝑑. = 𝜎𝜎𝐾𝐾 ∙ 232 ∙ 𝐾𝐾3 .
A pro velikost mezní síly následně dostáváme:
𝐹𝐹𝑚𝑚𝑐𝑐𝑧𝑧. = 6 ∙𝑀𝑀𝑑𝑑 𝑝𝑝𝑑𝑑.
ℓ= 6 ∙
𝜎𝜎𝐾𝐾 ∙ 232 ∙ 𝐾𝐾3
ℓ= 1 392 ∙ 𝜎𝜎𝐾𝐾 ∙
𝐾𝐾3
ℓ
Fmez.
2/3⋅ 1/3⋅
16⋅t
7⋅t
t
2⋅t
2⋅t
Fmez.
+Mo pl.
Rmez.
−Mo pl.
plastický mechanizmus
plast. kloub
plast. kloub
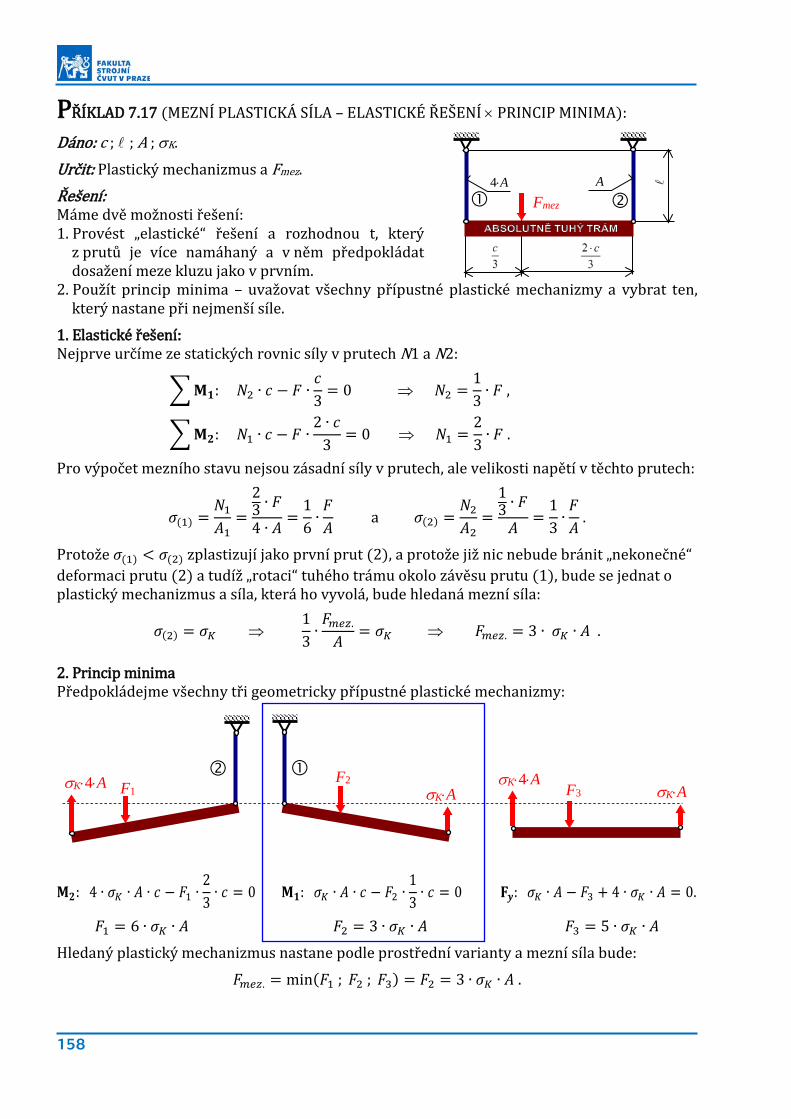
158
PŘÍKLAD 7.17 (MEZNÍ PLASTICKÁ SÍLA – ELASTICKÉ ŘEŠENÍ × PRINCIP MINIMA):
Dáno: c ; ; A ; σK.
Určit: Plastický mechanizmus a Fmez.
Řešení: Máme dvě možnosti řešení: 1. Provést „elastické“ řešení a rozhodnou t, který
z prutů je více namáhaný a v něm předpokládat dosažení meze kluzu jako v prvním.
2. Použít princip minima – uvažovat všechny přípustné plastické mechanizmy a vybrat ten, který nastane při nejmenší síle.
1. Elastické řešení: Nejprve určíme ze statických rovnic síly v prutech N1 a N2:
� 𝐌𝐌𝟏𝟏: 𝑁𝑁2 ∙ 𝑐𝑐 − 𝐹𝐹 ∙𝑐𝑐3
= 0 ⇒ 𝑁𝑁2 =13
∙ 𝐹𝐹 ,
� 𝐌𝐌𝟐𝟐: 𝑁𝑁1 ∙ 𝑐𝑐 − 𝐹𝐹 ∙2 ∙ 𝑐𝑐
3= 0 ⇒ 𝑁𝑁1 =
23
∙ 𝐹𝐹 .
Pro výpočet mezního stavu nejsou zásadní síly v prutech, ale velikosti napětí v těchto prutech:
𝜎𝜎(1) =𝑁𝑁1
𝐴𝐴1=
23 ∙ 𝐹𝐹4 ∙ 𝐴𝐴
=16
∙𝐹𝐹𝐴𝐴
a 𝜎𝜎(2) =𝑁𝑁2
𝐴𝐴2=
13 ∙ 𝐹𝐹
𝐴𝐴=
13
∙𝐹𝐹𝐴𝐴
.
Protože 𝜎𝜎(1) < 𝜎𝜎(2) zplastizují jako první prut (2), a protože již nic nebude bránit „nekonečné“ deformaci prutu (2) a tudíž „rotaci“ tuhého trámu okolo závěsu prutu (1), bude se jednat o plastický mechanizmus a síla, která ho vyvolá, bude hledaná mezní síla:
𝜎𝜎(2) = 𝜎𝜎𝐾𝐾 ⇒ 13
∙𝐹𝐹𝑚𝑚𝑐𝑐𝑧𝑧.
𝐴𝐴= 𝜎𝜎𝐾𝐾 ⇒ 𝐹𝐹𝑚𝑚𝑐𝑐𝑧𝑧. = 3 ∙ 𝜎𝜎𝐾𝐾 ∙ 𝐴𝐴 .
2. Princip minima Předpokládejme všechny tři geometricky přípustné plastické mechanizmy:
𝐌𝐌𝟐𝟐: 4 ∙ 𝜎𝜎𝐾𝐾 ∙ 𝐴𝐴 ∙ 𝑐𝑐 − 𝐹𝐹1 ∙23
∙ 𝑐𝑐 = 0 𝐌𝐌𝟏𝟏: 𝜎𝜎𝐾𝐾 ∙ 𝐴𝐴 ∙ 𝑐𝑐 − 𝐹𝐹2 ∙13
∙ 𝑐𝑐 = 0 𝐅𝐅𝒚𝒚: 𝜎𝜎𝐾𝐾 ∙ 𝐴𝐴 − 𝐹𝐹3 + 4 ∙ 𝜎𝜎𝐾𝐾 ∙ 𝐴𝐴 = 0.
𝐹𝐹1 = 6 ∙ 𝜎𝜎𝐾𝐾 ∙ 𝐴𝐴 𝐹𝐹2 = 3 ∙ 𝜎𝜎𝐾𝐾 ∙ 𝐴𝐴 𝐹𝐹3 = 5 ∙ 𝜎𝜎𝐾𝐾 ∙ 𝐴𝐴
Hledaný plastický mechanizmus nastane podle prostřední varianty a mezní síla bude:
𝐹𝐹𝑚𝑚𝑐𝑐𝑧𝑧. = min(𝐹𝐹1 ; 𝐹𝐹2 ; 𝐹𝐹3) = 𝐹𝐹2 = 3 ∙ 𝜎𝜎𝐾𝐾 ∙ 𝐴𝐴 .
F1 F2
F3 σK⋅4⋅A
σK⋅A σK⋅4⋅A
σK⋅A
Fmez
4⋅A A
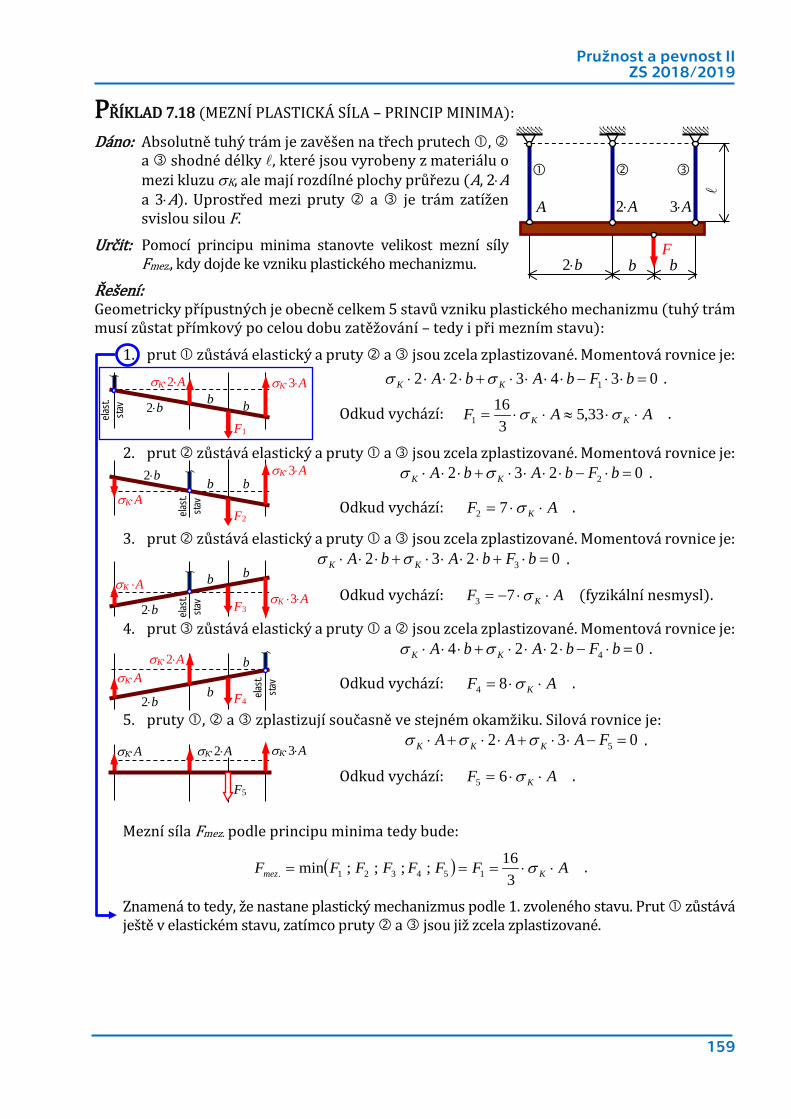
Pružnost a pevnost II ZS 2018/2019
159
PŘÍKLAD 7.18 (MEZNÍ PLASTICKÁ SÍLA – PRINCIP MINIMA):
Dáno: Absolutně tuhý trám je zavěšen na třech prutech , a shodné délky , které jsou vyrobeny z materiálu o mezi kluzu σK, ale mají rozdílné plochy průřezu (A, 2⋅A a 3⋅A). Uprostřed mezi pruty a je trám zatížen svislou silou F.
Určit: Pomocí principu minima stanovte velikost mezní síly Fmez., kdy dojde ke vzniku plastického mechanizmu.
Řešení: Geometricky přípustných je obecně celkem 5 stavů vzniku plastického mechanizmu (tuhý trám musí zůstat přímkový po celou dobu zatěžování – tedy i při mezním stavu):
1. prut zůstává elastický a pruty a jsou zcela zplastizované. Momentová rovnice je: 034322 1 =⋅⋅−⋅⋅⋅⋅+⋅⋅⋅⋅ bFbAbA KK σσ .
Odkud vychází: AAF KK ⋅⋅≈⋅⋅= σσ 33,53
161 .
2. prut zůstává elastický a pruty a jsou zcela zplastizované. Momentová rovnice je: 0232 2 =⋅−⋅⋅⋅⋅+⋅⋅⋅ bFbAbA KK σσ .
Odkud vychází: AF K ⋅⋅= σ72 .
3. prut zůstává elastický a pruty a jsou zcela zplastizované. Momentová rovnice je: 0232 3 =⋅+⋅⋅⋅⋅+⋅⋅⋅ bFbAbA KK σσ .
Odkud vychází: AF K ⋅⋅−= σ73 (fyzikální nesmysl).
4. prut zůstává elastický a pruty a jsou zcela zplastizované. Momentová rovnice je: 0224 4 =⋅−⋅⋅⋅⋅+⋅⋅⋅ bFbAbA KK σσ .
Odkud vychází: AF K ⋅⋅= σ84 .
5. pruty , a zplastizují současně ve stejném okamžiku. Silová rovnice je: 032 5 =−⋅⋅+⋅⋅+⋅ FAAA KKK σσσ .
Odkud vychází: AF K ⋅⋅= σ65 .
Mezní síla Fmez. podle principu minima tedy bude:
( ) AFFFFFFF Kmez ⋅⋅=== σ3
16;;;;min 154321. .
Znamená to tedy, že nastane plastický mechanizmus podle 1. zvoleného stavu. Prut zůstává ještě v elastickém stavu, zatímco pruty a jsou již zcela zplastizované.
3⋅A 2⋅A A
2⋅b b b F
F1
σK⋅2⋅A σK⋅3⋅A
elast.
stav 2⋅b b b
F2
σK⋅A
σK⋅3⋅A
elast.
stav
2⋅b b b
F3
σK ⋅A σK ⋅3⋅A
elast.
stav
2⋅b
b b
F4
σK⋅A σK⋅2⋅A
elast.
stav
2⋅b b
b
F5
σK⋅A σK⋅2⋅A σK⋅3⋅A
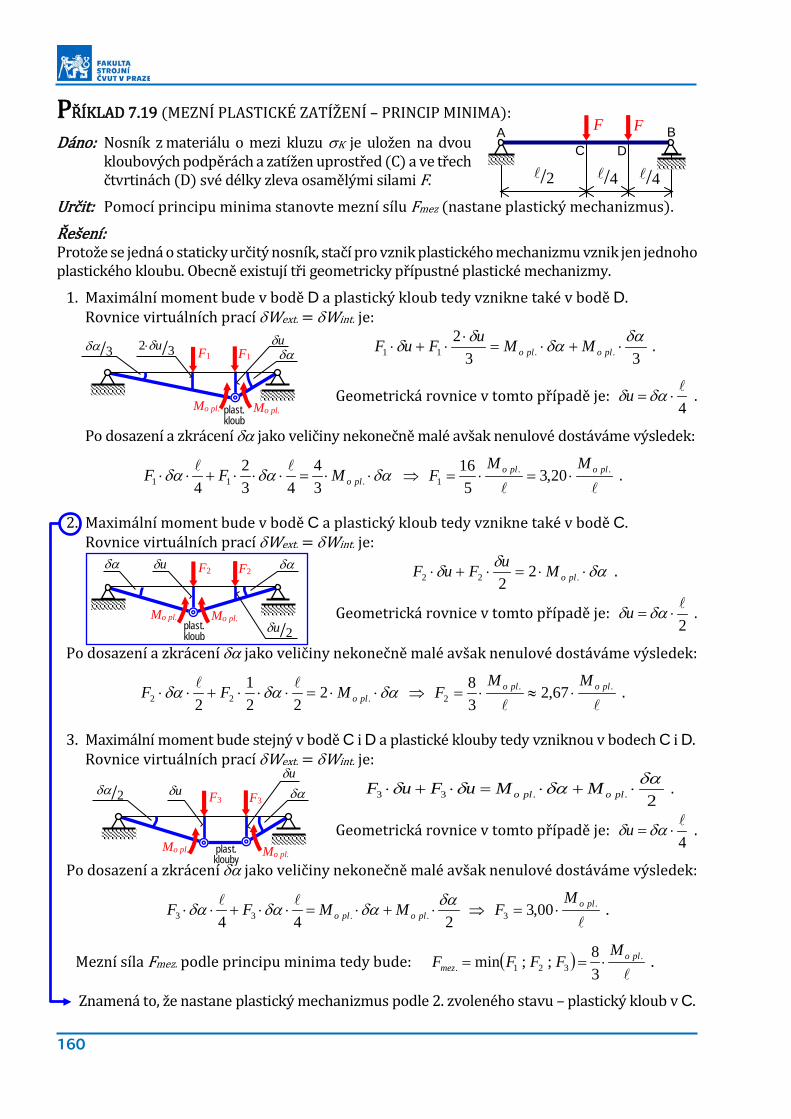
160
PŘÍKLAD 7.19 (MEZNÍ PLASTICKÉ ZATÍŽENÍ – PRINCIP MINIMA):
Dáno: Nosník z materiálu o mezi kluzu σK je uložen na dvou kloubových podpěrách a zatížen uprostřed (C) a ve třech čtvrtinách (D) své délky zleva osamělými silami F.
Určit: Pomocí principu minima stanovte mezní sílu Fmez (nastane plastický mechanizmus).
Řešení: Protože se jedná o staticky určitý nosník, stačí pro vznik plastického mechanizmu vznik jen jednoho plastického kloubu. Obecně existují tři geometricky přípustné plastické mechanizmy.
1. Maximální moment bude v bodě D a plastický kloub tedy vznikne také v bodě D. Rovnice virtuálních prací δWext. = δWint. je:
332
..11δαδαδδ ⋅+⋅=
⋅⋅+⋅ ploplo MMuFuF .
Geometrická rovnice v tomto případě je: 4
⋅= δαδu .
Po dosazení a zkrácení δα jako veličiny nekonečně malé avšak nenulové dostáváme výsledek:
δαδαδα ⋅⋅=⋅⋅⋅+⋅⋅ .11 34
432
4 ploMFF ⇒
..1 20,3
516 ploplo MM
F ⋅=⋅= .
2. Maximální moment bude v bodě C a plastický kloub tedy vznikne také v bodě C. Rovnice virtuálních prací δWext. = δWint. je:
δαδδ ⋅⋅=⋅+⋅ .22 22 ploMuFuF .
Geometrická rovnice v tomto případě je: 2
⋅= δαδu .
Po dosazení a zkrácení δα jako veličiny nekonečně malé avšak nenulové dostáváme výsledek:
δαδαδα ⋅⋅=⋅⋅⋅+⋅⋅ .22 222
12 ploMFF ⇒
..2 67,2
38 ploplo MM
F ⋅≈⋅= .
3. Maximální moment bude stejný v bodě C i D a plastické klouby tedy vzniknou v bodech C i D. Rovnice virtuálních prací δWext. = δWint. je:
2..33δαδαδδ ⋅+⋅=⋅+⋅ ploplo MMuFuF .
Geometrická rovnice v tomto případě je: 4
⋅= δαδu .
Po dosazení a zkrácení δα jako veličiny nekonečně malé avšak nenulové dostáváme výsledek:
244 ..33δαδαδαδα ⋅+⋅=⋅⋅+⋅⋅ ploplo MMFF ⇒
.3 00,3 ploM
F ⋅= .
Mezní síla Fmez. podle principu minima tedy bude: ( )
.321. 3
8;;min plomez
MFFFF ⋅== .
Znamená to, že nastane plastický mechanizmus podle 2. zvoleného stavu – plastický kloub v C.
/2 /4
F
/4
F A B
C D
F1 F1
plast. kloub
2⋅δu/3 δu δα
Mo pl. Mo pl.
δα/3
F3 F3
plast. klouby
δu δα
Mo pl. Mo pl.
δα/2 δu
F2 F2
plast. kloub
δu/2
δu δα δα
Mo pl. Mo pl.
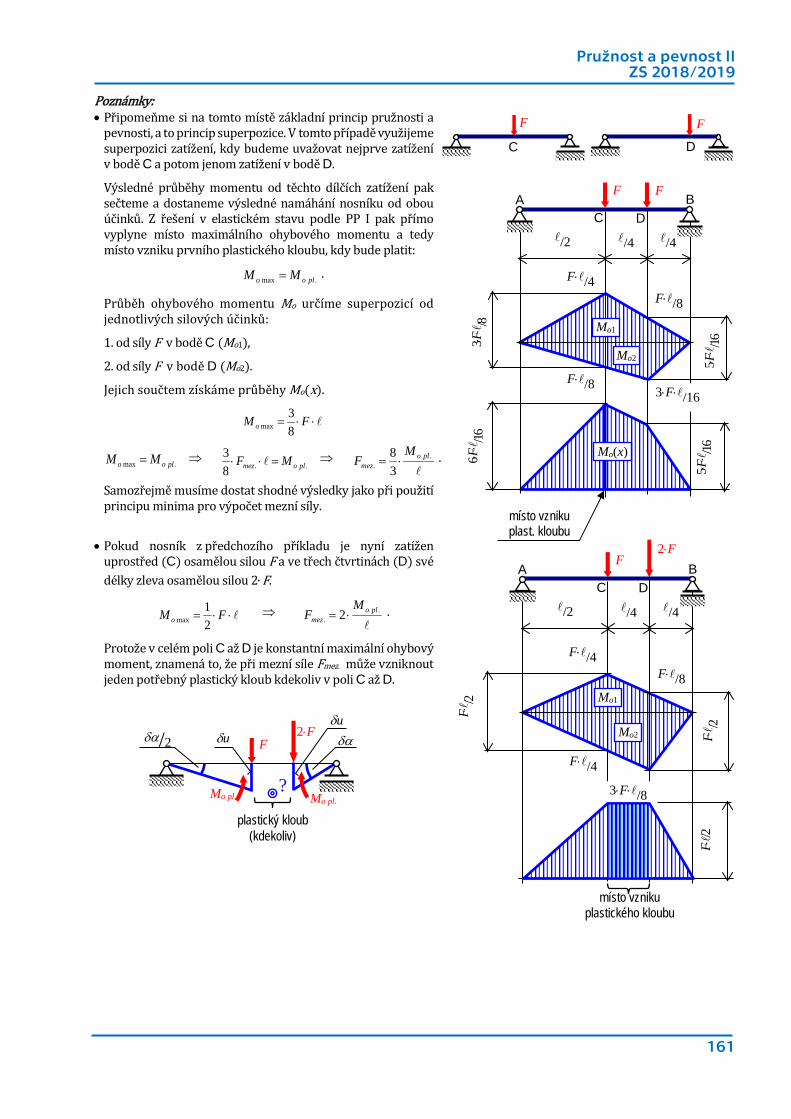
Pružnost a pevnost II ZS 2018/2019
161
Poznámky: • Připomeňme si na tomto místě základní princip pružnosti a
pevnosti, a to princip superpozice. V tomto případě využijeme superpozici zatížení, kdy budeme uvažovat nejprve zatížení v bodě C a potom jenom zatížení v bodě D.
Výsledné průběhy momentu od těchto dílčích zatížení pak sečteme a dostaneme výsledné namáhání nosníku od obou účinků. Z řešení v elastickém stavu podle PP I pak přímo vyplyne místo maximálního ohybového momentu a tedy místo vzniku prvního plastického kloubu, kdy bude platit:
.max ploo MM = .
Průběh ohybového momentu Mo určíme superpozicí od jednotlivých silových účinků:
1. od síly F v bodě C (Mo1),
2. od síly F v bodě D (Mo2).
Jejich součtem získáme průběhy Mo(x).
⋅⋅= FM o 83
max
.max ploo MM = ⇒ ..8
3plomez MF =⋅⋅ ⇒
.. 3
8 plomez
MF ⋅= .
Samozřejmě musíme dostat shodné výsledky jako při použití principu minima pro výpočet mezní síly.
• Pokud nosník z předchozího příkladu je nyní zatížen
uprostřed (C) osamělou silou F a ve třech čtvrtinách (D) své délky zleva osamělou silou 2⋅F.
⋅⋅= FM o 21
max ⇒
.. 2 plo
mez
MF ⋅= .
Protože v celém poli C až D je konstantní maximální ohybový moment, znamená to, že při mezní síle Fmez. může vzniknout jeden potřebný plastický kloub kdekoliv v poli C až D.
F⋅/4 F⋅/8
F⋅/8 3⋅F⋅/16
3⋅F⋅ /8
5⋅F⋅ /16
5⋅F
⋅ /16
6⋅F⋅ /16
místo vzniku plast. kloubu
Mo1
Mo2
Mo(x)
/2 /4
F
/4
F A B
C D
F
C D
F
F⋅ /2
/2 /4 /4
2⋅F
F⋅/4 F⋅/8
F⋅/4
F⋅ /2
F⋅
/2
místo vzniku plastického kloubu
Mo1
Mo2
Mo(x)
F A B
C D
3⋅F⋅/8
F 2⋅F
plastický kloub (kdekoliv)
δu δα
Mo pl. Mo pl.
δα/2 δu
?
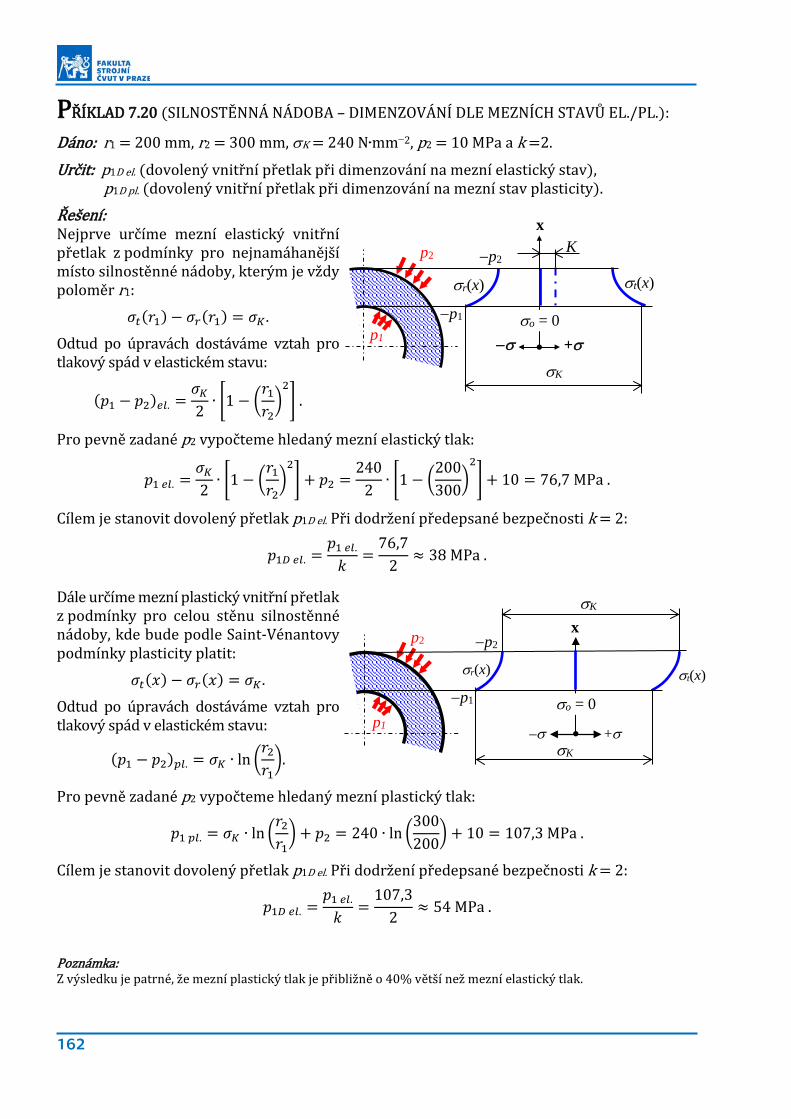
162
PŘÍKLAD 7.20 (SILNOSTĚNNÁ NÁDOBA – DIMENZOVÁNÍ DLE MEZNÍCH STAVŮ EL./PL.):
Dáno: r1 = 200 mm, r2 = 300 mm, σK = 240 N·mm−2, p2 = 10 MPa a k =2.
Určit: p1D el. (dovolený vnitřní přetlak při dimenzování na mezní elastický stav), p1D pl. (dovolený vnitřní přetlak při dimenzování na mezní stav plasticity).
Řešení: Nejprve určíme mezní elastický vnitřní přetlak z podmínky pro nejnamáhanější místo silnostěnné nádoby, kterým je vždy poloměr r1:
𝜎𝜎𝑒𝑒(𝑟𝑟1) − 𝜎𝜎𝑜𝑜(𝑟𝑟1) = 𝜎𝜎𝐾𝐾.
Odtud po úpravách dostáváme vztah pro tlakový spád v elastickém stavu:
(𝑝𝑝1 − 𝑝𝑝2)𝑐𝑐𝑑𝑑. =𝜎𝜎𝐾𝐾
2∙ �1 − �
𝑟𝑟1
𝑟𝑟2�
2� .
Pro pevně zadané p2 vypočteme hledaný mezní elastický tlak:
𝑝𝑝1 𝑐𝑐𝑑𝑑. =𝜎𝜎𝐾𝐾
2∙ �1 − �
𝑟𝑟1
𝑟𝑟2�
2� + 𝑝𝑝2 =
2402
∙ �1 − �200300
�2
� + 10 = 76,7 MPa .
Cílem je stanovit dovolený přetlak p1D el. Při dodržení předepsané bezpečnosti k = 2:
𝑝𝑝1𝐷𝐷 𝑐𝑐𝑑𝑑. =𝑝𝑝1 𝑐𝑐𝑑𝑑.
𝑘𝑘=
76,72
≈ 38 MPa .
Dále určíme mezní plastický vnitřní přetlak z podmínky pro celou stěnu silnostěnné nádoby, kde bude podle Saint-Vénantovy podmínky plasticity platit:
𝜎𝜎𝑒𝑒(𝑚𝑚) − 𝜎𝜎𝑜𝑜(𝑚𝑚) = 𝜎𝜎𝐾𝐾.
Odtud po úpravách dostáváme vztah pro tlakový spád v elastickém stavu:
(𝑝𝑝1 − 𝑝𝑝2)𝑝𝑝𝑑𝑑. = 𝜎𝜎𝐾𝐾 ∙ ln �𝑟𝑟2
𝑟𝑟1�.
Pro pevně zadané p2 vypočteme hledaný mezní plastický tlak:
𝑝𝑝1 𝑝𝑝𝑑𝑑. = 𝜎𝜎𝐾𝐾 ∙ ln �𝑟𝑟2
𝑟𝑟1� + 𝑝𝑝2 = 240 ∙ ln �
300200
� + 10 = 107,3 MPa .
Cílem je stanovit dovolený přetlak p1D el. Při dodržení předepsané bezpečnosti k = 2:
𝑝𝑝1𝐷𝐷 𝑐𝑐𝑑𝑑. =𝑝𝑝1 𝑐𝑐𝑑𝑑.
𝑘𝑘=
107,32
≈ 54 MPa .
Poznámka: Z výsledku je patrné, že mezní plastický tlak je přibližně o 40% větší než mezní elastický tlak.
p2
p1
K −p2
x
−p1
σK
+σ −σ
σt(x) σr(x)
σo = 0
p2
p1
−p1
−p2
σr(x) σt(x)
x
–σ +σ
σK
σK
σo = 0

Pružnost a pevnost II ZS 2018/2019
163
r1 r2 p1
PŘÍKLAD 7.21 (SILNOSTĚNNÁ NÁDOBA – ZBYTKOVÁ NAPĚTÍ):
Dáno: Otevřená silnostěnná válcová nádoba má rozměry r1 = 100 mm, r2 = 150 mm, zatížena je vnitřním přetlakem p1 (p2 = 0) a je vyrobena z materiálu o mezi kluzu σK = 200 N⋅mm-2.
Určit: p1 el. (mezní elastický tlak odpovídající konci elastického stavu), p1 pl. = p1 mez. mezní plastický tlak odpovídající zplastizování celé stěny), σt, r zb. (průběhy zbytkových napětí po odlehčení z mezního stavu plasticity).
Řešení: Nejprve určíme oba hledané mezní tlaky odpovídající jak konci elastického stavu p1 el., tak následně i meznímu stavu plasticity p1 pl. = p1 mez.:
MPa6,551501001
22001
2
22
2
1.1 ≈
−⋅=
−⋅=
rrp K
elσ a MPa1,81
100150ln200ln
1
2.1 ≈⋅=⋅=
rrp Kmez σ .
Zbytková napětí obecně určíme jako rozdíl skutečné napjatosti σ skut., která je doopravdy ve stěně silnostěnné nádoby, minus fiktivní napjatost σ fikt., která by vznikla ve stěně silnostěnné nádoby, pokud by tato byla v elastickém stavu po celou dobu zatěžování (může tedy nastat i případ, kdy σ fikt. > σK ):
.,
.,.,
fiktrt
skutrtzbrt σσσ −= .
1. Skutečný – mezní stav silnostěnné válcové nádoby (trubky) podle teorie Saint-Vénantovy:
Pro naznačení výpočtu zbytkových napětí ve stěně silnostěnné trubky použijeme jednodušší podmínku plasticity podle Saint-Vénanta ve tvaru:
Krt xx σσσ =− )()( ,
Podle této podmínky jsou průběhy radiálního resp. tečného napětí popsány funkcemi:
11
ln)( prxx Kr −⋅= σσ resp. 1
1
ln1)( prxx Kt −
+⋅= σσ .
2. Fiktivní – elastický stav silnostěnné válcové nádoby (trubky):
Protože p1 mez. > p1 el., bude napjatost při tomto tlaku pouze fiktivní – ve skutečnosti nemožná. Všechny vztahy elastického řešení použijeme a jen do nich dosadíme stav, který nemůže nastat:
21
22
21..
rrrp
K mezifikt
−
⋅= a 2
12
2
21
21
..
rrrrpC mezi
fikt
−⋅
⋅= ,
2
... )(
xCKx
fiktfiktfikt
t +=σ a 2
... )(
xCKx
fiktfiktfikt
r −=σ .
Z těchto výrazů dostáváme vztah mezi napětími ve tvaru )(2)( ... xKx fiktr
fiktfiktt σσ −⋅= , odkud bude:
.11. )( mez
fiktr pr −=σ a .1
.1
. 2)( mezfiktfikt
t pKr +⋅=σ resp. 0)( 2. =rfikt
rσ a .2
. 2)( fiktfiktt Kr ⋅=σ .
Nyní zobrazíme průběhy napětí σt(x) a σr(x) pro oba uvažované stavy nutné pro výpočet zbytkových tečný (mezní) stav a fiktivní (elastický) stav.
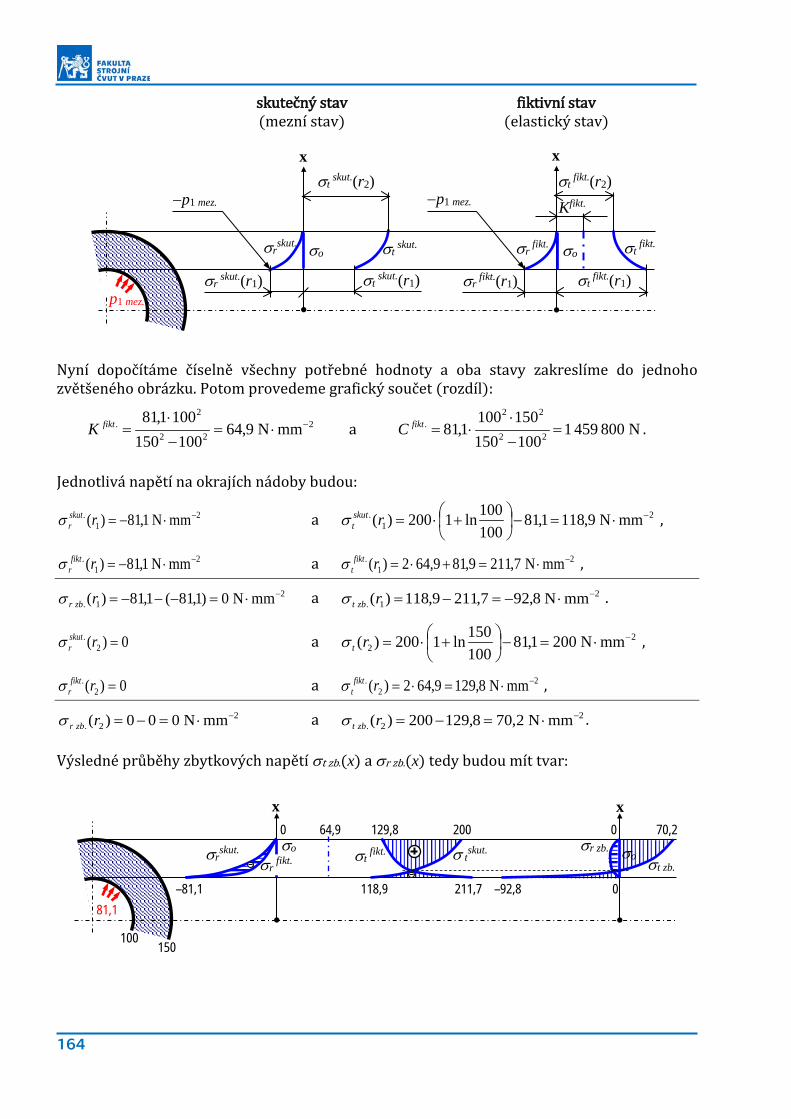
164
skutečný stav fiktivní stav (mezní stav) (elastický stav)
Nyní dopočítáme číselně všechny potřebné hodnoty a oba stavy zakreslíme do jednoho zvětšeného obrázku. Potom provedeme grafický součet (rozdíl):
222
2. mmN9,64
1001501001,81 −⋅=−
⋅=fiktK a N8004591
100150150100
1,81 22
22. =
−
⋅⋅=fiktC .
Jednotlivá napětí na okrajích nádoby budou:
21
. mmN1,81)( −⋅−=rskutrσ a 2
1. mmN9,1181,81
100100ln1200)( −⋅=−
+⋅=rskut
tσ ,
21
. mmN1,81)( −⋅−=rfiktrσ a 2
1. mmN7,2119,819,642)( −⋅=+⋅=rfikt
tσ ,
21. mmN0)1,81(1,81)( −⋅=−−−=rzbrσ a 2
1. mmN8,927,2119,118)( −⋅−=−=rzbtσ .
0)( 2. =rskut
rσ a 22 mmN2001,81
100150ln1200)( −⋅=−
+⋅=rtσ ,
0)( 2. =rfikt
rσ a 22
. mmN8,1299,642)( −⋅=⋅=rfikttσ ,
22. mmN000)( −⋅=−=rzbrσ a 2
2. mmN2,708,129200)( −⋅=−=rzbtσ .
Výsledné průběhy zbytkových napětí σt zb.(x) a σr zb.(x) tedy budou mít tvar:
p1 mez.
x
Kfikt.
σr fikt.(r1)
σt fikt.(r2)
σt fikt.(r1)
−p1 mez.
σt fikt. σr
fikt. σo
x
σrskut. σt
skut.
σr skut.(r1) σt
skut.(r1)
−p1 mez.
σt skut.(r2)
σo
σo
81,1
x x
σt fikt. σr
skut. σ tskut.
σr fikt. σt zb.
σr zb.
–81,1 118,9 211,7 –92,8 0
0 64,9 129,8 200 0 70,2
100 150
σo
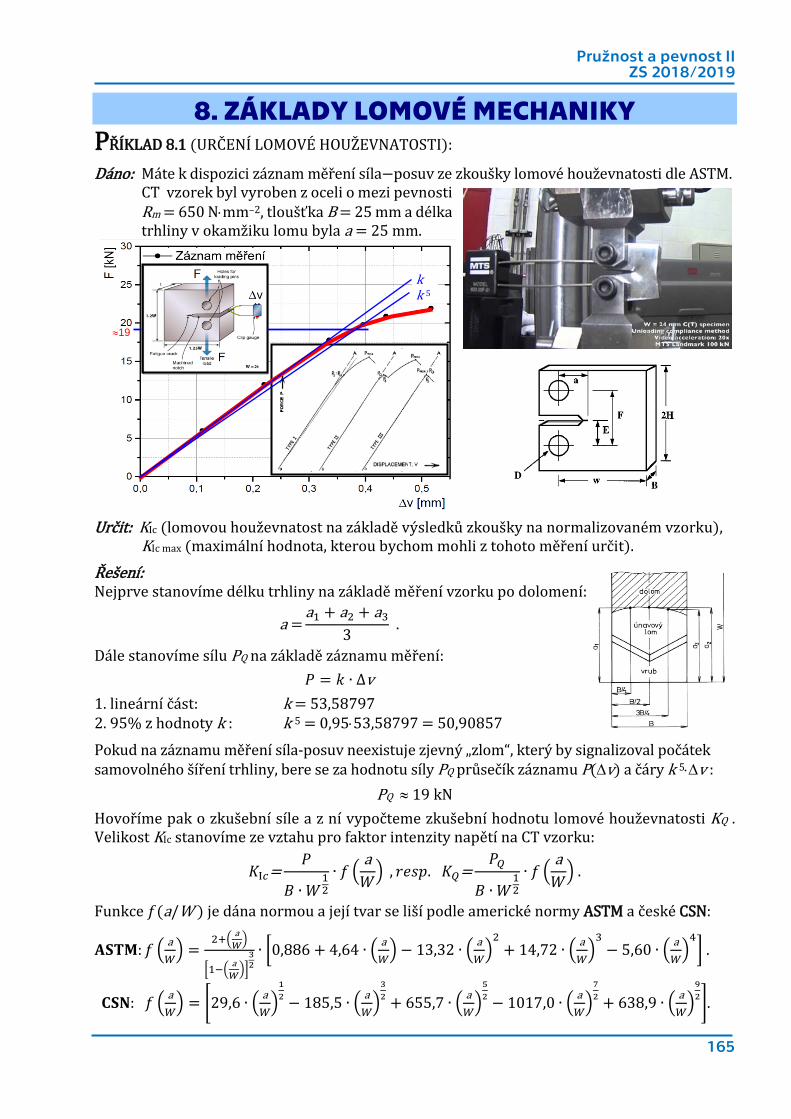
Pružnost a pevnost II ZS 2018/2019
165
8. ZÁKLADY LOMOVÉ MECHANIKY PŘÍKLAD 8.1 (URČENÍ LOMOVÉ HOUŽEVNATOSTI):
Dáno: Máte k dispozici záznam měření síla−posuv ze zkoušky lomové houževnatosti dle ASTM. CT vzorek byl vyroben z oceli o mezi pevnosti
Rm = 650 N⋅mm–2, tloušťka B = 25 mm a délka trhliny v okamžiku lomu byla a = 25 mm.
Určit: KIc (lomovou houževnatost na základě výsledků zkoušky na normalizovaném vzorku), KIc max (maximální hodnota, kterou bychom mohli z tohoto měření určit).
Řešení: Nejprve stanovíme délku trhliny na základě měření vzorku po dolomení:
a =a1 + a2 + a3
3 .
Dále stanovíme sílu PQ na základě záznamu měření: 𝑃𝑃 = 𝑘𝑘 ∙ ∆v
1. lineární část: k = 53,58797 2. 95% z hodnoty k : k 5 = 0,95⋅53,58797 = 50,90857
Pokud na záznamu měření síla-posuv neexistuje zjevný „zlom“, který by signalizoval počátek samovolného šíření trhliny, bere se za hodnotu síly PQ průsečík záznamu P(∆v) a čáry k 5⋅∆v :
PQ ≈ 19 kN Hovoříme pak o zkušební síle a z ní vypočteme zkušební hodnotu lomové houževnatosti KQ . Velikost KIc stanovíme ze vztahu pro faktor intenzity napětí na CT vzorku:
𝐾𝐾I𝑐𝑐=𝑃𝑃
𝐵𝐵 ∙ 𝑊𝑊12
∙ 𝑓𝑓 �a
𝑊𝑊� , 𝑟𝑟𝑟𝑟𝑑𝑑𝑝𝑝. 𝐾𝐾𝑄𝑄=
𝑃𝑃𝑄𝑄
𝐵𝐵 ∙ 𝑊𝑊12
∙ 𝑓𝑓 �a
𝑊𝑊� .
Funkce 𝑓𝑓(a/W ) je dána normou a její tvar se liší podle americké normy ASTM a české CSN:
𝐀𝐀𝐀𝐀𝐓𝐓𝐌𝐌: 𝑓𝑓 � a𝑊𝑊
� =2+� a
𝑊𝑊�
�1−� a𝑊𝑊��
32
∙ �0,886 + 4,64 ∙ � a𝑊𝑊
� − 13,32 ∙ � a𝑊𝑊
�2
+ 14,72 ∙ � a𝑊𝑊
�3
− 5,60 ∙ � a𝑊𝑊
�4
� .
𝐂𝐂𝐀𝐀𝐂𝐂: 𝑓𝑓 � a𝑊𝑊
� = �29,6 ∙ � a𝑊𝑊
�12 − 185,5 ∙ � a
𝑊𝑊�
32 + 655,7 ∙ � a
𝑊𝑊�
52 − 1017,0 ∙ � a
𝑊𝑊�
72 + 638,9 ∙ � a
𝑊𝑊�
92�.
k k 5
≈19
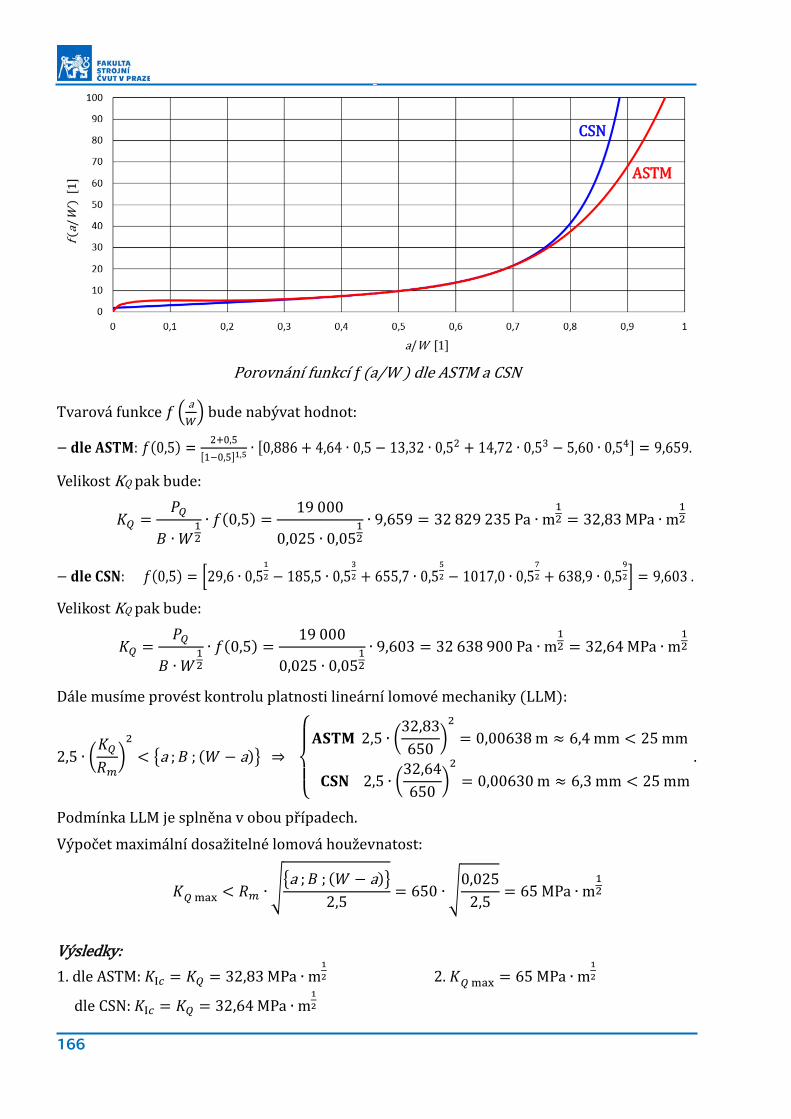
166
Porovnání funkcí 𝑓𝑓(a/W ) dle ASTM a CSN
Tvarová funkce 𝑓𝑓 � a𝑊𝑊
� bude nabývat hodnot:
− 𝐝𝐝𝐝𝐝𝐝𝐝 𝐀𝐀𝐀𝐀𝐓𝐓𝐌𝐌: 𝑓𝑓(0,5) = 2+0,5[1−0,5]1,5 ∙ [0,886 + 4,64 ∙ 0,5 − 13,32 ∙ 0,52 + 14,72 ∙ 0,53 − 5,60 ∙ 0,54] = 9,659.
Velikost KQ pak bude:
𝐾𝐾𝑄𝑄 =𝑃𝑃𝑄𝑄
𝐵𝐵 ∙ 𝑊𝑊12
∙ 𝑓𝑓(0,5) =19 000
0,025 ∙ 0,0512
∙ 9,659 = 32 829 235 Pa ∙ m12 = 32,83 MPa ∙ m
12
− 𝐝𝐝𝐝𝐝𝐝𝐝 𝐂𝐂𝐀𝐀𝐂𝐂: 𝑓𝑓(0,5) = �29,6 ∙ 0,512 − 185,5 ∙ 0,5
32 + 655,7 ∙ 0,5
52 − 1017,0 ∙ 0,5
72 + 638,9 ∙ 0,5
92� = 9,603 .
Velikost KQ pak bude:
𝐾𝐾𝑄𝑄 =𝑃𝑃𝑄𝑄
𝐵𝐵 ∙ 𝑊𝑊12
∙ 𝑓𝑓(0,5) =19 000
0,025 ∙ 0,0512
∙ 9,603 = 32 638 900 Pa ∙ m12 = 32,64 MPa ∙ m
12
Dále musíme provést kontrolu platnosti lineární lomové mechaniky (LLM):
2,5 ∙ �𝐾𝐾𝑄𝑄
𝑅𝑅𝑚𝑚�
2
< �a ; 𝐵𝐵 ; (𝑊𝑊 − a)� ⇒
⎩⎪⎨
⎪⎧ 𝐀𝐀𝐀𝐀𝐓𝐓𝐌𝐌 2,5 ∙ �
32,83650
�2
= 0,00638 m ≈ 6,4 mm < 25 mm
𝐂𝐂𝐀𝐀𝐂𝐂 2,5 ∙ �32,64650
�2
= 0,00630 m ≈ 6,3 mm < 25 mm .
Podmínka LLM je splněna v obou případech.
Výpočet maximální dosažitelné lomová houževnatost:
𝐾𝐾𝑄𝑄 max < 𝑅𝑅𝑚𝑚 ∙ ��a ; 𝐵𝐵 ; (𝑊𝑊 − a)�2,5
= 650 ∙ �0,025
2,5= 65 MPa ∙ m
12
Výsledky: 1. dle ASTM: 𝐾𝐾I𝑐𝑐 = 𝐾𝐾𝑄𝑄 = 32,83 MPa ∙ m
12 2. 𝐾𝐾𝑄𝑄 max = 65 MPa ∙ m
12
dle CSN: 𝐾𝐾I𝑐𝑐 = 𝐾𝐾𝑄𝑄 = 32,64 MPa ∙ m12
CSN
ASTM
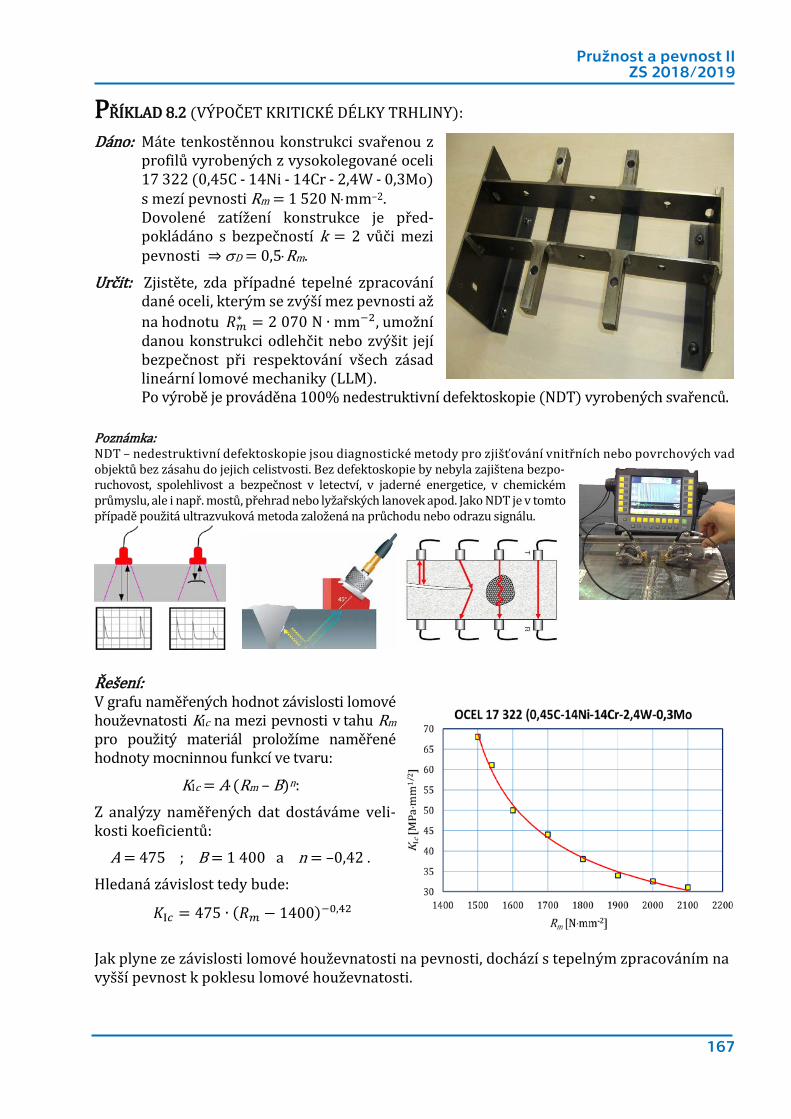
Pružnost a pevnost II ZS 2018/2019
167
PŘÍKLAD 8.2 (VÝPOČET KRITICKÉ DÉLKY TRHLINY):
Dáno: Máte tenkostěnnou konstrukci svařenou z profilů vyrobených z vysokolegované oceli 17 322 (0,45C - 14Ni - 14Cr - 2,4W - 0,3Mo) s mezí pevnosti Rm = 1 520 N⋅mm–2. Dovolené zatížení konstrukce je před- pokládáno s bezpečností k = 2 vůči mezi pevnosti ⇒ σD = 0,5⋅Rm.
Určit: Zjistěte, zda případné tepelné zpracování dané oceli, kterým se zvýší mez pevnosti až na hodnotu 𝑅𝑅𝑚𝑚
∗ = 2 070 N ∙ mm−2, umožní danou konstrukci odlehčit nebo zvýšit její bezpečnost při respektování všech zásad lineární lomové mechaniky (LLM). Po výrobě je prováděna 100% nedestruktivní defektoskopie (NDT) vyrobených svařenců.
Poznámka: NDT – nedestruktivní defektoskopie jsou diagnostické metody pro zjišťování vnitřních nebo povrchových vad objektů bez zásahu do jejich celistvosti. Bez defektoskopie by nebyla zajištena bezpo- ruchovost, spolehlivost a bezpečnost v letectví, v jaderné energetice, v chemickém průmyslu, ale i např. mostů, přehrad nebo lyžařských lanovek apod. Jako NDT je v tomto případě použitá ultrazvuková metoda založená na průchodu nebo odrazu signálu. Řešení: V grafu naměřených hodnot závislosti lomové houževnatosti KIc na mezi pevnosti v tahu Rm pro použitý materiál proložíme naměřené hodnoty mocninnou funkcí ve tvaru:
KIc = A⋅(Rm – B)n:
Z analýzy naměřených dat dostáváme veli-kosti koeficientů:
A = 475 ; B = 1 400 a n = –0,42 .
Hledaná závislost tedy bude:
𝐾𝐾I𝑐𝑐 = 475 ∙ (𝑅𝑅𝑚𝑚 − 1400)−0,42
Jak plyne ze závislosti lomové houževnatosti na pevnosti, dochází s tepelným zpracováním na vyšší pevnost k poklesu lomové houževnatosti.
168
Z hlediska klasického přístupu, kdy jsou průřezy dimenzovány tak, aby maximální napětí nepřekročilo dovolené napětí σD , je možno po zvýšení Rm opravdu zmenšit nosné průřezy a tím konstrukci odlehčit nebo u stávajícího uspořádání zvýšit bezpečnost konstrukce.
Z hlediska přístupu s uvažováním defektů je nutno zaručit, že trhlina nadkritické délky bude odhalena vždy odhalena pomocí použité metody NDT. Ultrazvukové zařízení použité v tomto případě je omezeno minimální velikostí detekovaných trhlin aNDT = 3 mm. To znamená, že trhliny menší než tato velikost nejsou tímto zařízením zjistitelné.
Pro správnou detekci tak, aby byly odhaleny všechny trhliny s nadkritickou délkou, musí být splněna podmínka:
acr. > aNDT = 3mm
Pro zjednodušení předpokládáme Irwingův model v módu I, kdy je trhlina je zatěžována právě dovoleným napětím σD a je průchozí, kdy platí:
𝐾𝐾I = 𝜎𝜎𝐷𝐷 ∙ √𝜋𝜋 ∙ a� (I)
kde a� je poloviční délka trhliny.
Podle rovnice KIc = A⋅(Rm – B)n nyní vypočteme hodnoty KIc pro oba stavy:
1. 𝑅𝑅𝑚𝑚 = 1 520 N ∙ mm−2 ⟹ 𝐾𝐾I𝑐𝑐 = 475 ∙ (1520 − 1400)−0,42 = 63,6 MPa ∙ m
12
2. 𝑅𝑅𝑚𝑚∗ = 2 070 N ∙ mm−2 ⟹ 𝐾𝐾I𝑐𝑐
∗ = 475 ∙ (2070 − 1400)−0,42 = 30,9 MPa ∙ m12
Ze vztahu (I) dostáváme: a� =𝐾𝐾I𝑐𝑐
2
𝜋𝜋 ∙ 𝜎𝜎𝐷𝐷2 .
Hledaná kritická délka trhliny odpovídající dovolenému zatížení bude: acr. =2 ∙ a� .
1. 𝑅𝑅𝑚𝑚 = 1 520 N ∙ mm−2 ⇒ 𝜎𝜎𝐷𝐷 = 0,5 ∙ 1 520 = 760 N ∙ mm−2 , 𝐾𝐾I𝑐𝑐 = 63,6 MPa ∙ m
12
a𝑐𝑐𝑜𝑜. = 2 ∙63,62
𝜋𝜋 ∙ 7602 = 0,0045 m = 𝟒𝟒, 𝟓𝟓 𝐦𝐦𝐦𝐦 > 𝟑𝟑 𝐦𝐦𝐦𝐦 = a𝐾𝐾𝐷𝐷𝑇𝑇
2. 𝑅𝑅𝑚𝑚∗ = 2 070 N ∙ mm−2 ⇒ 𝜎𝜎𝐷𝐷
∗ = 0,5 ∙ 2 070 = 1035 N ∙ mm−2 , 𝐾𝐾I𝑐𝑐∗ = 30,9 MPa ∙ m
12
a𝑐𝑐𝑜𝑜.∗ = 2 ∙
30,92
𝜋𝜋 ∙ 10352 = 0,00057 m = 𝟎𝟎, 𝟓𝟓𝟓𝟓 𝒎𝒎𝒎𝒎 < 𝟑𝟑 𝒎𝒎𝒎𝒎 = a𝐾𝐾𝐷𝐷𝑇𝑇
Je evidentní, že pro tepelně zpracovaný materiál nelze s daným NDT vybavením zaručit, že ve výrobku nejsou trhliny o kritické délce. Dovolené napětí v tepelně upravené konstrukci při použití stejné NDT metody s respektováním zásad lineární lomové mechaniky (LLM):
𝜎𝜎𝐷𝐷∗ < 𝜎𝜎�𝐷𝐷
∗ =𝐾𝐾I𝑐𝑐
∗
�𝜋𝜋 ∙ a𝐾𝐾𝐷𝐷𝑇𝑇2
=30,9
�𝜋𝜋 ∙ 0,0032
= 450 N ∙ mm−2
Abychom zajistili „zjistitelnost“ trhlin s kritickou a větší délkou trhliny při použití stávající NDT metody (rozlišení aNDT = 3mm) pro tepelně zpracovaný materiál konstrukce, museli bychom snížit dovolené namáhání na hodnotu 𝜎𝜎𝐷𝐷
∗ = 450 N ∙ mm−2, což by znamenalo paradoxně konstrukci naopak zesílit.

Pružnost a pevnost II ZS 2018/2019
169
PŘÍKLAD 8.3 (LOMOVÁ HOUŽEVNATOST):
Dáno: Hřídel železničního vagónu je vyrobena z oceli (po tepelné úpravě Re = 780 N⋅mm−2; Rm = 980 N⋅mm−2 a KIc ≈ 55 MPa⋅m1/2 ). Při generální opravě byly podrobnou defektoskopií odhaleny v konstrukci trhliny o délce amax = 1,5 mm. Průměr stykové plochy kola je D = 920 mm. Ze statistického rozboru zatížení víme, že rozkmit ohybového namáhání je ±σo. Pro tento rozkmit ohybového napětí jsme pomocí zjednodušeného vztahu určili rozkmit faktoru intenzity napětí ∆K = 15 MPa⋅mm1/2 (pro hodnoty σo min < 0 uvažujeme Kmin = 0, a proto ∆K = Kmax ≈ σo max).
Určit: Podle pravidel lineární lomové mechaniky (LLM) a s využitím Parisova vztahu stanovte vzdálenost, kterou může ještě náprava bezpečně absolvovat s bezpečností k = 2.
Řešení: Pro bezpečnost k bude dovolené napětí:
𝜎𝜎𝐷𝐷 =𝑅𝑅𝑚𝑚
𝑘𝑘=
9802
= 490 N ∙ mm−2 .
Pro tuto hodnotu dovoleného napětí určíme podle pravidel lineární lomové mechaniky (LLM) velikost kritické délky trhliny:
a𝑐𝑐𝑜𝑜.=2 ∙ a� = 2 ∙𝐾𝐾𝐼𝐼𝑐𝑐
2
𝜋𝜋 ∙ 𝜎𝜎𝐷𝐷2 = 2 ∙
552
𝜋𝜋 ∙ 4902 = 0,008 m = 8,0 mm .
Za předpokladu platnosti Parisova vztahu pro stabilní šíření trhliny: 𝜕𝜕a𝜕𝜕𝑁𝑁
= 𝐶𝐶 ∙ ∆𝐾𝐾𝑚𝑚
určíme hodnoty koeficientu C a exponentu m pomocí přibližných vztahů (Kocańda, S., Szala, J.: Base of Fatigue Calculation, PWN, 3rd ed., Warsaw 1997) jako:
𝐶𝐶≈ 2,1 ∙ 10−11 a 𝑚𝑚 = 3,02 .
Po dosazení do Parisova vztahu dostáváme: 𝜕𝜕a𝜕𝜕𝑁𝑁
= 𝐶𝐶 ∙ ∆𝐾𝐾𝑚𝑚 = 2,1 ∙ 10−11 ∙ 153,02 = 7,48 ∙ 10−8 [mm/cyklus]
Pokud nahradíme diferenciály diferencemi (𝜕𝜕a → ∆a a 𝜕𝜕N → ∆N), získáme vztah pro potřebný počet cyklů při daných parametrech:
∆𝑁𝑁 =∆a
𝐶𝐶 ∙ ∆𝐾𝐾𝑚𝑚 .
Pro vznik trhliny kritické délky a𝑐𝑐𝑜𝑜. se musí stávající trhliny délky a𝑚𝑚𝑚𝑚𝑚𝑚 zvětšit o:
∆a = a𝑐𝑐𝑜𝑜. − a𝑚𝑚𝑚𝑚𝑚𝑚 = 8,0 − 1,5 = 6,5 mm .
Tuto hodnotu dosadíme do vztahu pro počet cyklů:
∆𝑁𝑁 =∆a
𝐶𝐶 ∙ ∆𝐾𝐾𝑚𝑚 =6,5
7,48 ∙ 10−8 = 86 875 729 [cyklů] .
Za předpokladu, že jeden cyklus je reprezentován jednou otáčkou nápravy, bude vzdálenost:
ℓ𝑐𝑐𝑜𝑜. = 𝜋𝜋 ∙ 𝐷𝐷 ∙ ∆𝑁𝑁 = 𝜋𝜋 ∙ 0,92 ∙ 86 875 729 = 251 093 898 m ≈ 250 000 km .
170
SEZNAM DOPORUČENÉ LITERATURY
[1] MICHALEC, Jiří, a kol.: Pružnost a pevnost II, Vydavatelství ČVUT, Praha 1994, 2000 a 2006.
[2] VALENTA, František, a kol.: Pružnost a pevnost III, Vydavatelství ČVUT, Praha 1995 a 2002.
[3] HÁJEK, Emanuel, REIF, Pavel, VALENTA, František: Pružnost a pevnost, SNTL, Praha 1988.
[4] PEŠINA, Eugen, REIF, Pavel, VALENTA, František: Sbírka příkladů z pružnosti a pevnosti, SNTL/ALFA, Praha 1964.
[5] TREBUŇA, František, ŠIMČÁK, František, JURICA, Vladimír: Pružnosť a pevnosť II, VIENALA Košice, 2000, Slovensko.
[6] ŘEZNÍČKOVI, Jan a Jitka: Pružnost a pevnost v technické praxi - Příklady II, NakladatelstvíČVUT, Praha 2006.
[7] ŘEZNÍČEK, Jan: Pružnost a pevnost I – Přednášky, Podklady pro studenty FS ČVUT v Praze,dostupné z: http://pruznost.unas.cz, Praha 2006 – 2018.
[8] ŘEZNÍČEK, Jan: Pružnost a pevnost II – Přednášky, Podklady pro studenty FS ČVUT v Praze,dostupné z: http://pruznost.unas.cz, Praha 2007 – 2018.
[9] PARIS, P., C., GOMEZ, M., P., ANDERSON, W., E.: A rational analytic theory of fatigue, TheTrend in Engineering 1961.
NEJSEM JENOM UČITEL! Kromě pružnosti a pevnosti, resp. celé mechaniky mám ještě jednoho koníčka – tedy vzpínajícího se koně na zadních. Již dlouhá léta sbírám modely Ferrari formule 1 od ročníku 1950 až po dnešek.
Řada z vás také zná můj „červený roh“ v kanceláři, který se snažím neustále doplňovat o další a další exempláře všech velikostí od malých měřítek 1/72 přes 1/43, 1/36, 1/32, 1/24 až po největší 1/18.
KDOPAK VÁS TO VLASTNĚ UČIL? Narodil jsem se v roce 1957. Základní devítiletou školu a gymnázium jsem absolvoval v Benešově. V letech 1976 až 1981 jsem studoval na Fakultě strojní ČVUT v Praze magisterský (inženýrský) obor Aplikovaná mechanika. Ihned po absolvování fakulty jsem nastoupil do podniku Teplotechna a následně na prezenční službu do armády, kde jsem působil rok jako technik a staral se všechna možná vojenská vozidla. V roce 1982 jsem nastoupil na tehdejší Katedru pružnosti a pevnosti na stáž a tím pádem od roku 1982 pravidelně učím na fakultě.
Začínal jsem nejprve tím „nejjednodušším“ − Pružností a pevností I. Postupně jsem si „troufnul“ i na Pružnost a pevnost II a další oborové předměty. V letech 1983 − 84 jsem souběžně pracoval ve výpočetním oddělení SVÚSS v Praze Běchovicích. Po rozdělení Československa a vzniku samostatné Fakulty dopravní na ČVUT v Praze jsem tam v letech 1995 – 98 přednášel a cvičil Pružnost a pevnost. V současnosti dále na Fakultě strojní učím předměty: Experimentální metody certifikace strojů v bakalářském studiu a Pevnost letadel a motorů v navazujícím magisterském studiu. Od roku 2006 jsem členem vedení fakulty a od roku 2010 jsem proděkanem pro pedagogickou činnost Fakulty strojní ČVUT v Praze.
Mým heslem je: Přednášky jsou jedno velké divadlo, a jestli to je komedie nebo tragédie, to se ukáže až u zkoušky!!!
Jan Řezníček PRUŽNOST A PEVNOST II – PŘÍKLADY Podklady pro přednášky v bakalářských studijních programech: „Teoretický základ strojního inženýrství“ a „Strojírenství“
Fakulta strojní České vysoké učení technické v Praze, Technická 4, 166 07 Praha 6, Vystaveno dne 15. října 2018 na: http://www.pruznost.unas.cz
Vydání první 170 stran, 245 obrázků, 123 řešené příklady















