Ernest 2004 6. Teorie systém6.1 Historie teorie systém• Intuitivní pedstava - systém jako množina element, které jsou vázány njakým vztahem mezi sebou . Takto definoval systém Ludwig von Bertalanfy na poátku ticátých let. Prof. Bertalanfy se zabýval teorií otevených systémstimulovaných potebami biologie. • Tato základní myšlenka dala vznik nové vdecké disciplín- obecné teorii systém. Za zakladatele obecné teorie systémje považován prof. Bertalanfy, který ukázal, že interakce mezi ástmi jsou pro vlastnosti celku velmi dležité a že celek mže vykazovat vlastnosti, které bezprostednnevyplývají z vlastností jeho ástí. • Zaátek 40. let znamenal výrazný rozvoj a polarizace obecné teorie systém. Dva smry - první reprezentoval požadavky biologie, ekonomie a dalších málo formalizovaných disciplín a byl spíše verbálním popisem, druhý smr vycházel zejména z teorie obvoda teorie ízení, jako deduktivní pístup vycházejících z uritých axiom. 6.2 Základní pojmy obecné teorie systémNašemu vdeckému zkoumání nelze prakticky podrobit veškerou objektivní realitu. Z dvod, které jsou nám intuitivnjasné, ale které mají mnohdy hluboké fyzikální opodstatnní, je našemu zkoumání v každém okamžiku pístupná vždy pouze jistá ást objektivní reality. Tuto ást nazýváme objekt , všechno ostatní okolím . Objekt mžeme vyšetovat z rzných hledisek. Na zvoleném objektu pozorujeme nebo míme urité vlastnosti . Výbr vlastností závisí na tom, co považujeme za významné vzhledem k danému úelu. Vztah mezi vybranými vlastnostmi na daném objektu definuje systém nad objektem.
Transcript
Ernest 2004
6. Teorie systém
6.1 Historie teorie systém
• Intuitivní pedstava - systém jako množina element, které jsou vázány njakým vztahem mezi sebou. Takto definoval systém Ludwig von Bertalanfy na poátku ticátých let. Prof. Bertalanfy se zabýval teorií otevených systém stimulovaných potebami biologie.
• Tato základní myšlenka dala vznik nové vdecké disciplín - obecné teorii systém. Za zakladatele obecné teorie systém je považován prof. Bertalanfy, který ukázal, že interakce mezi ástmi jsou pro vlastnosti celku velmi dležité a že celek mže vykazovat vlastnosti, které bezprostedn nevyplývají z vlastností jeho ástí.
• Zaátek 40. let znamenal výrazný rozvoj a polarizace obecné teorie systém. Dva smry - první reprezentoval požadavky biologie, ekonomie a dalších málo formalizovaných disciplín a byl spíše verbálním popisem, druhý smr vycházel zejména z teorie obvod a teorie ízení, jako deduktivní pístup vycházejících z uritých axiom.
6.2 Základní pojmy obecné teorie systém Našemu vdeckému zkoumání nelze prakticky podrobit veškerou objektivní realitu. Z dvod, které jsou nám intuitivn jasné, ale které mají mnohdy hluboké fyzikální opodstatnní, je našemu zkoumání v každém okamžiku pístupná vždy pouze jistá ást objektivní reality. Tuto ást nazýváme objekt, všechno ostatní okolím. Objekt mžeme vyšetovat z rzných hledisek. Na zvoleném objektu pozorujeme nebo míme urité vlastnosti. Výbr vlastností závisí na tom, co považujeme za významné vzhledem k danému úelu. Vztah mezi vybranými vlastnostmi na daném objektu definuje systém nad objektem.
Ernest 2004
objekt
okolí
objektivní realita
systém
Procesem definování systému na objektu rozlišujeme nkolik hierarchických úrovní. Soubor zmn pozorovaných vlastností (promnných) nazveme aktivita systému. Pesnost a frekvence, s jakou budeme mit promnné, urují asoprostorovou rozlišovací úrove v prostoru zvolených promnných.
• Zdrojový systém - definujeme soubor promnných na objektu se zvolenou rozlišovací úrovní a pípustnými mezemi tchto promnných. Vymezení univerzální množiny charakterizující daný systém.
• Datový systém - doplnní zdrojového systému konkrétním vzorkem aktivity systému.
• Generativní systém - najdeme-li vztah mezi promnnými, který nám umožní generovat stejná data, jako zmínný vzorek aktivity.
Dlení systém podle interakce s okolím:
• ízený (orientovaný) systém - u daného systému lze rozlišit vstupy a výstupy systému (vstupy - jsou veliiny, které zpsobují zmny ostatních veliin systému a samy závisí pouze na okolí systému, výstupy - veliiny systému, které zpsobují zmny v okolí systému). Odporový dli, regulátor.
• Neízený (volný) systém - u tohoto systému dlení na vstupy a výstupy neexistuje nebo není známo. Harmonický oscilátor, hod kostkou atd.
Ernest 2004
Rozdlení systém podle kauzality:
• Deterministický systém. Jestliže lze chování systému úpln popsat jako množinu uspoádaných dvojic píin a následk, tzn. jestliže urité píin odpovídá vždy stejný následek, považujeme takový systém za deterministický. U deterministického systému je píina podmínkou nutnou i postaující k urení následku. Píkladem je první Newtonv zákon, kdy jestliže psobí síla (píina), pohyb hmotného bodu se zrychluje (následek), a naopak jestliže se pohyb hmotného bodu zrychluje, musí na nj psobit njaká síla.
• Stochastický systém. Opak deterministického systému. Jedné píin mže odpovídat i nkolik rzných následk (s rznými pravdpodobnostmi). Píina je zde jen nutnou, nikoli postaující podmínkou pro urení následku. Píkladem mže být nap. kvantová fyzika (Haisenbergovy relace neuritosti pro hybnost a energii ástice). Stochastické chování vykazují i deterministické systémy, u kterých psobí velké množství píin, piemž nkteré z nich neznáme, nebo neumíme mit.
Spojité a diskrétní systémy:
• Spojitý systém. Promnné nabývají reálných hodnot a jsou spojité v hodnotách. Promnnou obvykle bývá i as, který se asto zámrn odlišuje od ostatních veliin.
• Diskrétní systém. Promnné nabývají hodnot z množiny celých ísel. Jedná se i o kvantované i vzorkované spojité systémy, které se ídí íslicovými poítai pracujícími s diskrétními hodnotami.
Dynamické a statické systémy:
• Dynamický systém. Promnné se mní s asem. • Statický systém. Promnné se s asem nemní.
Ernest 2004
6.3 Dynamický systém a jeho popisy
Su(t) y(t)
x(t)
6.3.1 Vnitní popis dynamických systém
• Vnitní popis nelineárních spojitých deterministických dynamických systém popisuje vztah mezi stavovými (vnitními) veliinami systému:
),),(),(()(),),(),(()(
.
ttutxgty
ttutxftx
==
kde x(t) je vektor stavových promnných, y(t) je vektor výstupních promnných a u(t) je vektor vstupních promnných.
• Nelineární spojitý nedeterministický dynamický systém lze popsat:
),()),(),(()(),()),(),(()(
.
tettutxgty
tvttutxftx
+=+=
kde v(t) je šum procesu a e(t) je šum mení. • Nelineární diskrétní deterministický dynamický systém
lze popsat:
),),(),(()(),),(),(()1(
kkukxgky
kkukxfkx
==+
kde x(k+1) stav v k+1 kroku. Obdobn lze definovat i nedeterministický systém.
Ernest 2004
• Lineární spojitý deterministický asov invariantní dynamický systém (LTI system) lze popsat stavovou a výstupní rovnicí:
),(.)(.)(),(.)(.)(
.
tuDtxCty
tuBtxAtx
+=+=
kde A je matice systému, B je matice ízení, C a D jsou výstupní matice.
• Lineární spojitý deterministický asov neinvariantní dynamický systém lze popsat stavovou a výstupní rovnicí:
).().()().()(),().()().()(
.
tutDtxtCty
tutBtxtAtx
+=+=
• Lineární spojitý nedeterministický asov invariantní dynamický systém lze popsat:
).()(.)(.)(),()(.)(.)(
.
tetuDtxCty
tvtuBtxAtx
++=++=
• Lineární diskrétní nedeterministický asov invariantní dynamický systém lze popsat:
).()(.)(.)(),()(.)(.)1(
kekuDkxCky
kvkuNkxMkx
++=++=+
• Lineární diskrétní nedeterministický asov neinvariantní dynamický systém lze popsat:
).()().()().()(),()().()().()1(
kekukDkxkCky
kvkukNkxkMkx
++=++=+
Ernest 2004
Pevod spojitého stavového popisu na diskrétní:
• Spojitý systém mže být peveden na diskrétní pomocí disktretizace.
• Dvod - asto používáme k ízení poítae (PLC, prmyslová PC, log. ízení atd.), které mí vstupy a výstupy v diskrétních asech.
• Málo systém je diskrétních v principu (mnoho jich vzniká diskretizací spojitých).
• Nutno dodržet vzorkovací vtu, jinak nebezpeí aliasing error a nestability (Shannon-Kotlnikv teorém).
• Mnoho metod diskterizace - ZOH, Eulerova atd.
Píklad 1: lineární RC obvod
R1 C
CR2
u1=u u3u2=y
Urete : a) vnitní spojitý stavový popis obvodu na obrázku b) diskretizujte systém užitím Eulerovy metody ad a) Užitím metody uzlových naptí dostaneme dv nezávislé obvodové rovnice
( )
( ) ( ) .0)(
)()()(
,0)()()()(
2
2232
231
13
=++−
=−+−
Rtu
tudtd
Ctutudtd
C
tutudtd
CR
tutu
Ernest 2004
Úpravou dostaneme
( ))(01
)()(
0110
)(
)(2 1
3
2.
3
.
2
22
11 tutu
tu
tu
tuCRCR
CRCR
+
−−
=
−−
,
vynásobením pedchozí rovnice inverzí první matice máme stavový popis obvodu
( )
( ) ( ) ( )( ),)(0)(
)(01)(
)(2
1
)(
)(21
11
)(
)(
1
3
22
1
1
1
3
2
12
12.
3
.
2
tutu
tutu
tu
CR
CR
tu
tu
CRCR
CRCR
tu
tu
+
==
+
−−
−−=
y
,
kde x je stavový vektor systému,
=)(
)(
3
2
tu
tux ,
A je matice systému,
−−
−−=
CRCR
CRCR
12
1221
11
A ,
B je matice ízení,
=
CR
CR
1
12
1
B a u vektor ízení, u = ( ))(1 tu
y je výstupní vektor, ( ))(2 tu=y , pro matice výstupní rovnice platí
( ) ( ).0,01 == CD
Ernest 2004
ad b) Užitím Eulerovy metody provedeme náhradu derivací za diference, tedy pro stavovou rovnici lze napsat jako
( ) ( ) ).(..)(..)1(
),(.)(.)()1(
)(
kuBTkxATIkx
kuBkxAT
kxkxtx
dtd
ss
s
++=+
+=−+≅
Porovnáním pedchozí aproximace dostaneme matice lineárního diskrétního systému jako
( ) ( )BTATI ss .,. =+= NM , kde Ts je vzorkovací perioda. Tedy pro disktretizovaný lineární systém z píkladu lze napsat
( )
( ) ( ) ( )( ).)(0)(
)(01)(
)(2)(
)(2
11
11
)1()1(
1
3
22
1
1
1
3
2
12
12
3
2
kuku
kuku
ku
CRTCR
T
ku
ku
CRT
CRT
CRT
CRT
ku
ku
s
s
ss
ss
+
==
+
−−
−−=
++
y
Pevod nelineárního stavového popisu na lineární:
• Nelineární systém mže být peveden na lineární pomocí linearizace v pracovním bodu.
• Dvod - celá teorie ízení je vypracována pro lineární systémy (stavová zptná vazba, PID regulace, LQ regulace atd.) - nelineární ízení je složité a používají se asto numerické metody.
• Málo systém je lineárních v principu (za lineární je považujeme pouze pi zjednodušení vzhledem k pracovním podmínkám - nap. neexistuje lineární cívka).
Ernest 2004
• Linearizovaný model platí s dostatenou pesností pouze v blízkém okolí pracovního bodu, kde byla linearizace provedena.
Na obrázku je zobrazeno tzv. rotaní kyvadlo, které se skládá z ramene délky la a hmotnosti ma, které je pohánno motorem o naptí u a otáí se dokola. Na konci tohoto ramene je upevnno kyvadlo délky lp a hmotnosti mp. Výchylka otoného ramene je ϕa a výchylka kyvadla od rovnovážné polohy je ϕp. Zanedbáním dynamiky motoru a dalších vazeb v systému lze toto kyvadlo modelovat zjednodušen jako (identifikovaný model):
),()(
),()(
),(.9)(.800)(
),(cos).(.1450)(sin.600.2)(
.
.
.
.
tt
tt
ttut
ttutt
aa
pp
aa
pppp
ωϕ
ωϕ
ωω
ϕϕωω
=
=
−=
+−−=
Ernest 2004
Urete : a) linearizovaný model za podmínky x0 = (0,0,0,π), u0 = (0) a
x0 = (0,0,0,0), u0 = (0). Pedpokládejme dále, že míme oba úhly.
b) vlastní ísla charakterizující dynamiku model z bodu a).
ad a) Nelineární model rotaního kyvadla je ve tvaru
( )
),()(
),()(
),(.9)(.800)(
,)(),(),(),()(
.
.
.
1
.
tt
tt
ttut
ttttft
aa
pp
aa
ppapp
ωϕ
ωϕ
ωω
ϕϕωωω
=
=
−=
=
( ).)(00
)()()()(
10000100
)(
)(.
.
tu
t
t
t
t
t
t
a
p
a
p
a
p
+
=
ϕϕωω
ϕ
ϕ
Linearizovat je nutno pouze první rovnici stavového popisu (ostatní jsou lineární, výstupní rovnice je také lineární), tedy lineární model bude ve tvaru
( ).)(
00
800
)(
)(
)(
)(
001000010090
)(
)(
)(
)( 11111
.
.
.
.
tuuf
t
t
t
tffff
t
t
t
t
a
p
a
p
apap
a
p
a
p
∂∂
+
−∂∂
∂∂
∂∂
∂∂
=
ϕ
ϕ
ω
ωϕϕωω
ϕ
ϕ
ω
ω
Ernest 2004
Po výpotu parciálních derivací máme
( ).)(
00
800cos.1450
0010000100900sin..1450cos.60002
.
.
.
.
tu
p
a
p
a
ppup
a
p
a
p
+
−−−−
=
ϕ
ϕ
ϕ
ω
ωϕϕ
ϕ
ϕ
ω
ω
Dosazením pracovního bodu (i) x0 = (0,0,0,π), u0 = (0) a (ii) x0 = (0,0,0,0), u0 = (0) do pedchozího modelu dostaneme lineární popis
(i)
( ))(
00
8001450
001000010090060002
.
.
.
.
tu
a
p
a
p
a
p
a
p
−
+
−−
=
ϕ
ϕ
ω
ω
ϕ
ϕ
ω
ω
,
(ii)
( ))(
00
8001450
001000010090060002
.
.
.
.
tu
a
p
a
p
a
p
a
p
+
−−−
=
ϕ
ϕ
ω
ω
ϕ
ϕ
ω
ω
.
ad b)
Pro vlastní ísla λ lineárního modelu )(.)(.)(.
tuBtxAtx += platí: .0)det( =− AIλ
Aplikací pedchozího vztahu na linearizovaný model (i) dostaneme algebraickou rovnici
Ernest 2004
0)54005822113.(
0100010090060002
det)det( =−−+=
−−
+−+
=− λλλλ
λλ
λλ
λ AI .
Vlastní ísla systému (i) dostaneme urením koen pedchozí algebraické rovnice, tedy
λ1 = 0, λ2 = − 9, λ3 = − 25.5, λ4 = 23.5. Pro linearizovaný model (ii) a jeho vlastní ísla dostaneme algebraickou rovnici
0)54005822113.(
0100010090060002
det)det( =+++=
−−
++
=− λλλλ
λλ
λλ
λ AI .
Vlastní ísla systému (ii) dostaneme urením koen pedchozí algebraické rovnice, tedy
• Nkolik definic stability, Asymptotická versus Ljapunovská stabilita, BIBO stabilita.
• Asymptotická stabilita lineárních spojitých systém – lineární spojitý systém definovaný vnitním stavovým popisem
)(.)(.)(.
tuBtxAtx += je stabilní tehdy, pokud vlastní ísla tohoto systému definovaná algebraickou rovnicí 0)det( =− AIλ leží v levé polorovin komplexní roviny, tedy
Reλi < 0, ∀ i = 1, 2, ….. n. • Ljapunovská stabilita lineárních spojitých systém – systém
mže kmitat, vlastní ísla mohou ležet na imaginární ose.
Ernest 2004
• Asymptotická stabilita lineárních diskrétních systém – lineární diskrétní systém definovaný vnitním stavovým popisem
)(.)(.)1( kuNkxMkx +=+ je stabilní tehdy, pokud vlastní ísla tohoto systému definovaná algebraickou rovnicí 0)det( =− MIλ leží v uvnit jednotkové kružnice, jejíž sted prochází poátkem komplexní roviny, tedy
|λi| < 1, ∀ i = 1, 2, ….. n. • Ljapunovská stabilita lineárních diskrétních systém – systém
mže kmitat, vlastní ísla mohou ležet na hranici jednotkové kružnice.
• Stabilita nelineárních systém – vlastnost ešení stacionárních rovnovážných bod, stabilita lineárních systém – vlastnost systému. Stabilita ve velkém versus stabilita v malém.
Píklad 3: stabilita linearizovaného modelu rotaního kyvadla Urete stabilitu v malém linearizovaných vnitních popis za podmínky (i) x0 = (0,0,0,π), u0 = (0) a (ii) x0 = (0,0,0,0), u0 = (0). Diskutujte s pedstavou stability v tchto dvou rovnovážných bodech.
Pro vlastní ísla modelu (i) dostaneme algebraickou rovnici
0)54005822113.(
0100010090060002
det)det( =−−+=
−−
+−+
=− λλλλ
λλ
λλ
λ AI .
Vlastní ísla systému (i) dostaneme urením koen pedchozí algebraické rovnice, tedy platí
λ1 = 0, λ2 = − 9, λ3 = − 25.5, λ4 = 23.5. Vlastní íslo λ1 = 0 odpovídá mezi stability (Ljapunovsky stabilní pól), vlastní ísla λ2 = − 9 a λ3 = − 25.5 odpovídají stabilním pólm systému, vlastní íslo λ4 = 23.5 odpovídá
Ernest 2004
nestabilnímu pólu. Linearizovaný systém (i) x0 = (0,0,0,π), u0 = (0) odpovídá kyvadlu v nestabilní poloze pro úhel kyvadla ϕp = π. Vzhledem k posuzování stability systému v malém se jedná o nestabilní systém, linearizovaný model v rovnovážném bodu není ani asymptoticky ani Ljapunovsky stabilní.
Pro vlastní ísla modelu (ii) dostaneme algebraickou rovnici
0)54005822113.(
0100010090060002
det)det( =+++=
−−
++
=− λλλλ
λλ
λλ
λ AI .
Vlastní ísla systému (ii) dostaneme urením koen pedchozí algebraické rovnice, tedy
λ1 = 0, λ2 = − 9, λ3 = − 1 − 24.5j, λ4 = − 1 + 24.5j. Vlastní íslo λ1 = 0 odpovídá mezi stability (Ljapunovsky stabilní pól), vlastní ísla λ2 = − 9, λ3 = − 1 − 24.5j a λ4 = − 1 + 24.5j odpovídají stabilním pólm systému. Linearizovaný systém (i) x0 = (0,0,0,0), u0 = (0) odpovídá kyvadlu ve stabilní poloze pro úhel kyvadla ϕp = 0. Vzhledem k posuzování stability systému v malém se jedná o asymptoticky nestabilní systém a Ljapunovsky stabilní systém.
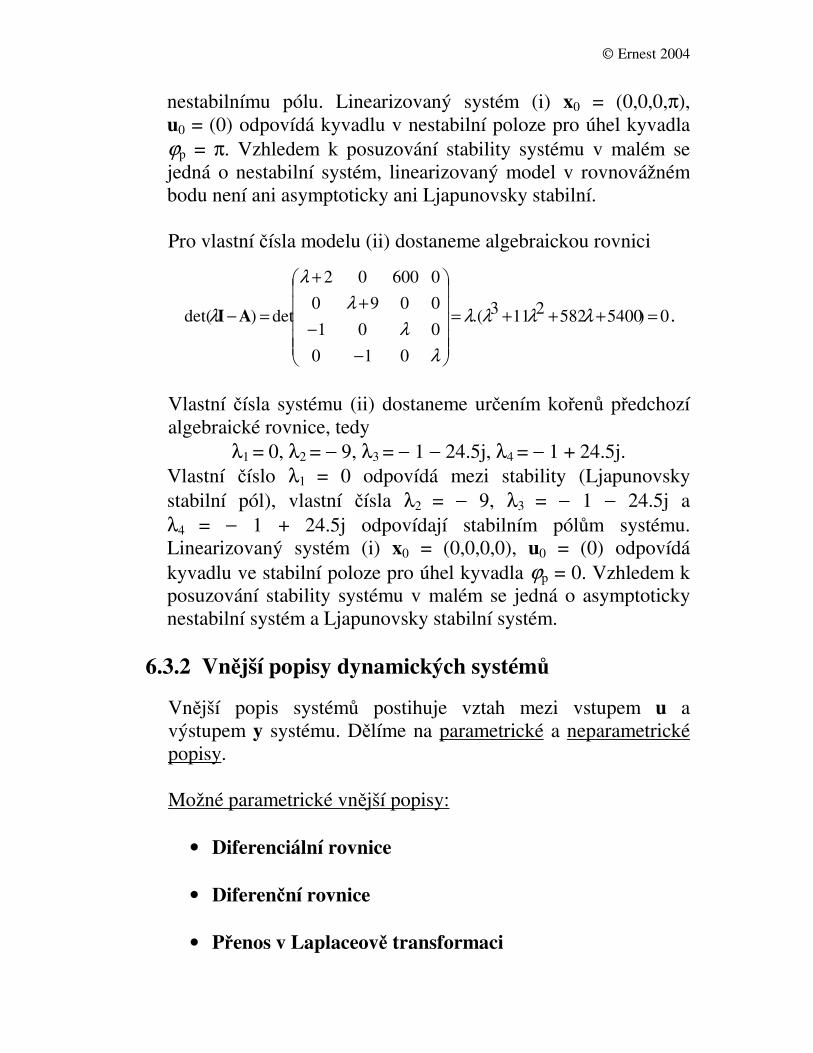
6.3.2 Vnjší popisy dynamických systém
Vnjší popis systém postihuje vztah mezi vstupem u a výstupem y systému. Dlíme na parametrické a neparametrické popisy. Možné parametrické vnjší popisy:
Pro obvod na obrázku s parametry R1 = 1kΩ, R2 = 2kΩ a C = 1µF urete : a) Penos v Laplaceov transformaci a frekvenní penos b) Diferenciální rovnici popisující dynamiku mezi vstupem a
výstupem obvodu c) Póly a nuly penosu systému a jejich stabilitu d) Impulsní a pechodovou charakteristiku
Ernest 2004
ad a) Pro parametry obvodu dosazením do vnitního popisu systému máme
( )
( ) ( ) ( )( ),)(0)(
)(01)(
,)(200100
)(
)(2005010050
)(
)(
1
3
22
1
3
2.
3
.
2
tutu
tutu
tutu
tu
tu
tu
+
==
+
−−−−
=
y
Pro penos systému v Laplaceov transformaci v pípad znalosti vnitního popisu platí
[ ] )(..).()().()( 1 sUDBAsICsUsGsY +−== − , kde G(s) je penosová matice systému. Dosazením do pedchozího vztahu dostáváme penos systému v Laplaceov transformaci
5000250
100)()(
)(2
1
2
++==
ss
ssUsU
sG .
Frekvenní penos mžeme urit z penosu systému. Pedpokládejme, že v ustáleném stavu platí s = jω. Potom pro frekvenní penos systému platí
5000250)(
100
)(
)()( 2
1
2
++== ∧
∧∧
ωωωωjj
j
sU
sUjF .
ad b)
Diferenciální rovnici lze získat z vnitního popisu systému eliminací vnitních stav. Další možností je získání diferenciální rovnice pímo z penosu systému jako
Póly a nuly penosu lze získat ešením algebraické rovnice jmenovatele a itatele penosu, tedy pro póly penosu platí algebraická rovnice
050002502 =++ ss , póly uríme jako koeny této rovnice (shodné s vlastními ísly matice systému)
17.25125,17.25125 21 −−=+−= ss . Pro nuly penosu platí algebraická rovnice
0100 =s , tedy máme jedinou nulu a to s = 0. Oba póly penosu jsou stabilní.
ad d)
Impulsní charakteristika w(t) je odezva systému na Dirackv impulz na vstupu systému. Odezvu lze spoítat analyticky z penosu systému jako
)(5000250
100)().()( 1212 sU
ss
ssUsGsU
++== ,
pro obraz Dirackova impulsu platí Lδ(t)=1, impulsní odezvu W(s) v operátorovém tvaru lze napsat jako
5000250
100)()( 2 ++
==ss
ssGsW ,
zptnou Laplaceovou transformací dostaneme
.1717250
501717250
50
172512517/1725050
172512517/1725050
5000250
100)(
)1725125()1725125(
12
1
tt ee
ssL
ss
sLtw
+−−−
−−
−+
+=
=
−+−+
+++=
++=
Ernest 2004
Pechodová charakteristika a(t) je odezva systému na jednotkový skok na vstupu systému. Odezvu lze spoítat analyticky z penosu systému jako
)(5000250
100)().()( 1212 sU
ss
ssUsGsU
++== ,
pro obraz jednotkového skoku platí Lδ(t)=1/s, pechodovou charakteristiku A(s) v operátorovém tvaru lze napsat jako
)5000250.(
1001)()( 2 ++
==sss
ss
sGsA ,
zptnou Laplaceovou transformací dostaneme
.17172
17172
172512517/172
172512517/172
5000250
100)(
)1725125()1725125(
12
1
tt ee
ssL
ssLta
+−−−
−−
+
−=
=
−++
++−=
++=
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-20
0
20
40
60
80
100
t [s]
w(t)
Ernest 2004
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50
0.05
0.1
0.15
0.2
0.25
0.3
0.35
t [s ]
a(t)
6.4 Systémy a modely
6.4.1 Volba struktury modelu
Strukturu modelu zvolíme podle apriorní znalosti o systému a poruchách, které na nj psobí. Obecn volíme bu vnjší popis systému (výhodné pro snadnou identifikaci pomocí SW utilit - identifikaní toolbox MATLABu), nebo vnitní model, který mže být obecn nelineární. Pro modelování dynamických systému používáme obecných metod (vnitní popisy):
• Odvození modelu na základ fyzikálního popisu - tato metoda je pípadem klasického analytického modelování, která je založena na sestavení diferenciálních a algebraických rovnic. Vhodné na libovolné systémy, pracný postup odvozování popisu.
• Modelování systém užitím tzv. vazebních graf - opaný pístup než u metody pedchozí, nejprve modelovaný systém rozložíme na podsystémy a jejich vazby znázorníme orientovaným grafem. Vznikne tak
Ernest 2004
nejprve simulaní schéma, z kterého mže být odvozen matematický model. Vhodná metoda pro tzv. hybridní systémy, systémy které se skládají z podsystém elektrických, pneumatických, hydraulických, mechanických, tepelných atd.
• Modelování užitím Lagrangeovy metody - vhodná metoda pro modelování složitých mechanických, obecn nelineárních systém. Odvození vnitního popisu systému je založeno na parciálních derivacích Lagrangeovy funkce reprezentující energii systému.
6.4.2 Volba parametr modelu
Úloha nalezení parametr modelu se nazývá identifikace parametr modelu a je formulována jednak strukturou identifikovaného modelu, a kritériem, které vyhodnocuje rozdíl mezi odezvou modelovaného a skuteného systému na spolený budící vstupní signál. Úloha identifikace parametr je pak formulována jako optimalizaní úloha, nap. úloha minimalizace soutu kvadrát odchylek výstupu modelovaného a reálného systému na stejný vstupní signál vzhledem k promnným, což jsou hledané parametry modelu. K jejímu ešení se používá asto metoda nejmenších tverc (Least Squares - LS), která byla poprvé publikována geniálním C. F. Gaussem v roce 1809 v práci o pohybu vesmírných tles. Pro odhad parametr modelu se používají následující techniky:
• Vyhodnocení pechodové a frekvenní charakteristiky • Metody korelaní a spektrální analýzy • Metoda nejmenších tverc a její modifikace • Statistická metoda maximální vrohodnosti
Ernest 2004
6.5 Systémy a ízení ízení dynamických systém lze dlit: a) Direktivní ízení - ízení bez zptné vazby, ídicí len
(regulátor) nemá informaci o výstupu y systému
Su(t) y(t)
x(t)
R
v(t)
yR(t)
regulátor regulovaná soustava
uR(t)
b) Zptnovazební ízení - ízení se zptnou vazbou - regulátor
má informaci o výstupu systému a ídící veliinu u nastavuje tak, aby na výstupu y byla požadovaná hodnota w
Su(t) y(t)
x(t)
R
v(t)
yR(t)e(t)w(t)
+-
regulátor regulovaná soustava
Podstatnou výhodou zptnovazební regulace (použita stabilní záporná zptná vazba - viz. obrázek) je informace o výstupu systému a možnost kompenzace poruch v(t) psobících na vstupu systému. Direktivní ízení tuto poruchu nekompenzuje a porucha se negativn projeví na výstupu systému.
Ernest 2004
K ízení systém používáme bu lineární metody návrhu nebo nelineární metody návrhu. asté metody návrhu ízení dynamických systému používají lineární pístup, v pípad nelineární regulované soustavy se používá linearizace v pracovním bodu regulace (nap. ízení kyvadla v horní poloze). K návrhu ízení užíváme tedy vnitní popis systému (soustava diferenciálních rovnic charakterizujících stavy systému) nebo vnjší popis systému (diferenciální rovnice charakterizující vztah mezi vstupem a výstupem systému). Pro ízení za pedpokladu znalosti vnjšího popisu systému se asto používají metody
• PID regulátory (metoda umísování pól, frekvenní
metody syntézy nebo experimentální metoda Ziegler-Nichols)
• Algebraické metody syntézy (založeno na ešení diofantické rovnice, volíme požadovaný penos uzavené smyky)
• Nelineární metody ízení Pro ízení za pedpokladu znalosti vnitního popisu systému se asto používají metody
• Stavová zptná vazba (umísování pól systému, regulace probíhá od stav systému, v pípad, že neznáme stavy systému nutno sestrojit pozorovatele stavu)
• Kvadraticky optimální ízení - LQ regulátor (stavová zptná vazba, k regulaci použito ustálené ešení stavové zptné vazby dle kritéria)
• Nelineární stavová zptná vazba (zákon ízení není lineární, ídicí funkce je nelineární a její aplikací provedeme linearizaci nelineárního popisu)
Ernest 2004
Píklad 5: PID regulace lineárního systému Pro systém druhého ádu s penosem
161010
)( 2 ++=
sssGs
navrhnte: a) P regulátor metodou umísování pól tak, aby póly uzavené
smyky byly stabilní a regulaní odchylka byla menší jak 10 %. Vypotte póly uzavené smyky pro tuto podmínku a pechodovou charakteristiku uzavené smyky.
b) Navrhnte P regulátor metodou umísování pól tak, aby chování uzavené smyky bylo na mezi aperiodicity. Urete póly uzavené smyky, regulaní odchylku v ustáleném stavu a pechodovou charakteristiku uzavené smyky.
c) Navrhnte PI regulátor metodou umísování pól tak, aby regulaní proces byl na mezi aperiodicity. Urete póly uzavené smyky a regulaní odchylku v ustáleném stavu.
ad a)
Pro operátorový penos uzavené regulaní smyky Gw(s) mezi požadovanou hodnotou w a výstupem soustavy y platí
)().(1)().(
)(1)(
)()(
)(0
0
sGsGsGsG
sGsG
sWsY
sGRS
RSw +
=+
== ,
kde G0(s) je penos odevené regulaní smyky, GS(s) je penos soustavy a GR(s) je penos regulátoru. Pro penos soustavy a P regulátoru platí
161010
)( 2 ++=
sssGS , pR KsG =)( .
Pro penos uzavené smyky platí
p
pw
Kss
KsG
.101610
.10)( 2 +++
= .
Pro póly penosu uzavené smyky platí algebraická rovnice
0.1016102 =+++ pKss .
Ernest 2004
Póly uzavené smyky dostaneme ešením pedchozí rovnice
2
4036512
pKs
−±−= .
Pro regulaní odchylku platí
[ ])(1lim.1000
% sGe ws
−=→
,
dosazením penosu uzavené smyky máme podmínku
+++−>
→ p
p
s Kss
K
.101610
.101lim.10010 20
,
ešením máme podmínku pro proporcionální složku Kp
Kp > 14.4.
Volíme tedy Kp = 15. Pro tuto podmínku máme póly uzavené smyky
1415,1415 21 jsjs +−=−−= . Pro pechodovou charakteristiku uzavené smyky v operátorovém tvaru lze psát
.141)5(
5
141)5(
518375
16610
1018375
)16610()16610(
150)(
222
22
++−
+++−=
+++−=
=++
++=++
=
ss
ssss
ss
ss
CBssA
ssssA
Po zptné Laplaceov transformaci dostáváme pechodovou charakteristiku uzavené regulaní smyky
( ) ( )teteta tt .141sin14183
375.141cos
8375
8375
)( .5.5 −− −−= .
Ernest 2004
0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
0.2
0.4
0.6
0.8
1
t [s]
a(t)
ad b)
Pro penos uzavené smyky s P regulátorem platí
p
pw
Kss
KsG
.101610
.10)( 2 +++
= .
Pro charakteristický polynom ve jmenovateli penosu pro mez aperiodicity musí platit
22 )(.101610 asKss p +=+++ , potom porovnáním koeficient rovnice dostaneme podmínku pro neznámé parametry, tedy
9.0,5 == pKa . Penos uzavené smyky bude mít tvar
22 )5(
9
2510
9)(
+=
++=
ssssGw .
Póly uzavené smyky jsou tedy
5,5 21 −=−= ss (dvojnásobný pól -5). Pro regulaní odchylku v ustáleném stavu platí
[ ] %64259
1100)(1lim.1000
% =
−=−=→
sGe ws
.
Ernest 2004
Pro pechodovou charakteristiku uzavené smyky v operátorovém tvaru lze psát
.)5(
159
)5(1
2591
259
)5()5()5(
9)(
2
22
+−
+−=
=+
++
+=+
=
sss
s
Cs
BsA
sssA
Po zptné Laplaceov transformaci dostáváme pechodovou charakteristiku uzavené regulaní smyky
tt eteta .5.5 ..59
259
259
)( −− −−= .
0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.05
0.1
0.15
0.2
0.25
0.3
0.35
a(t)
t [s] ad c)
Pro penos otevené smyky s PI regulátorem platí
p
Ip
Ksss
KK
sG.101610
.10)( 20 +++
+= ,
kde (Kp + KI/s) je penos PI regulátoru.
Ernest 2004
Pro penos uzavené smyky platí
Ip
Ipw
KsKss
KsKsG
.10)..1016(10
.10..10)( 23 ++++
+= .
Pro charakteristický polynom ve jmenovateli penosu pro mez aperiodicity musí platit
323 )(.10)..1016(10 asKsKss Ip +=++++ , potom porovnáním koeficient rovnice dostaneme podmínku pro neznámé parametry, tedy
27100
,1526
,3
10 === Ip KKa .
Penos uzavené smyky bude mít tvar
323
310
27
1000468
100046827027
1000468)(
+
+=+++
+=s
s
sss
ssGw .
Póly uzavené smyky jsou tedy
310
,3
10,
310
321 −=−=−= sss (trojnásobný pól).
Pro regulaní odchylku v ustáleném stavu platí
[ ] %010001000
1100)(1lim.1000
% =
−=−=→
sGe ws
.
0 0.5 1 1.5 2 2.5 3 3.5 4
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1.1
t [s]
a(t)
Ernest 2004
Úlohy
1. Pro následující spojitý lineární systém urete
( ))(2010
)()(
2822
)(
)(1
2
1.
2
.
1 tutx
tx
tx
tx
+
=
a) diskrétní systém pomocí Eulerovy metody, který
vznikne ze spojitého vzorkováním s periodou T = 0.5s,
b) diskutujte stabilitu vlastních ísel spojitého i diskrétního systému.
2. Pro následující spojitý nelineární systém urete
)(.3)(.9)(sin.6)(
),(.5)(.10)(cos).(sin.5)(
11
.
2
221
.
1
tutxtxtx
tutxtxtxtx
−+−=
+−=
a) linearizovaný systém v okolí pracovního bodu
x0 = (π/2,0), u0 = (0), b) diskutujte stabilitu vlastních ísel spojitého
linearizovaného systému.
3. Pro následující spojitý lineární systém urete
( )
( )
=
+
−−
=
)()(
10)(
)(31
)()(
6452
)(
)(
2
1
12
1.
2
.
1
tx
txty
tutx
tx
tx
tx
a) operátorový penos mezi vstupem u a výstupem y
systému, b) póly a nuly penosu a jejich stabilitu, c) impulsovou a pechodovou charakteristiku.
Ernest 2004
4. Pro následující spojitý lineární systém daný penosem navrhnte
105
)()(
)(+
==ssU
sYsGS
a) P regulátor tak, aby regulaní odchylka byla menší
jak 5 %, dále urete pro jaké zesílení regulátoru je uzavená smyka stabilní,
b) PI regulátor tak, aby regulaní pochod byl na mezi aperiodicity a jeho asová konstanta byla 50 ms, urete regulaní odchylku v ustáleném stavu.
Použitá literatura [1] Kotek, Vysoký, Zdráhal, Kybernetika, SNTL, 1990. [2] Horáek, Systémy a modely, vydavatelství VUT, 1998. [3] John, Systémy a ízení, vydavatelství VUT, 1996. [4] Stránky pedmtu – pednášky http://gerstner.felk.cvut.cz.





































![Ernest Hemingway [érnyst hemingvej], metoda ledovce · - 1 - Ernest Hemingway [érnyst hemingvej], metoda ledovce (1899 – 1961) „Potřebujeme dva roky, abychom se naučili mluvit,](https://static.dokumenty.site/doc/80x56/5e08d0944c006829c82c5c60/ernest-hemingway-rnyst-hemingvej-metoda-1-ernest-hemingway-rnyst-hemingvej.jpg)






