81
Vojenská robotika Armáda české republiky Univezita obrany pplk. Ing. Jan MAZAL, Ph.D. Katedra vojenského managementu a taktiky Fakulta ekonomiky a managementu [email protected]

Vojenská robotika
Armáda české republiky Univezita obrany
pplk. Ing. Jan MAZAL, Ph.D. Katedra vojenského managementu a taktiky
Fakulta ekonomiky a managementu [email protected]

Univerzita obrany • Univerzita obrany byla zřízena 1. září 2004
• Univerzita obrany vznikla splynutím tří institucí
o Vysoké vojenské školy pozemního vojska ve Vyškově,
o Vojenské akademie v Brně
o a Vojenské lékařské akademie Jana Evangelisty Purkyně v Hradci
Králové.
• Každá z těchto škol se po 1. září 2004 fakticky stala jednou ze tří fakult
Univerzity obrany
Dislokace:
Brno
o Kounicova 65, 44, Tučkova 23
o Kasárna Šumavská
o Kasárna Černá pole
o Kasárna Jan Babáka
o Kasárna Židenice
Hradec Králové-Fakulta vojenského zdravotnictví
o Třebešská 1575
Vyškov- Ústav ochrany proti zbraním hromadného ničení
o Víta Nejedlého

Katedra vojenského managementu a taktiky:
• Autonomní a taktická navigace
• Počítačová podpora taktických rozhodnutí
• Systémy C4ISTAR
• Operačně taktické úlohy a optimalizace
• Návrh a realizace experimentálních bezosádkových a bezpilotních prostředků
• Interoperabilita systémů ASVŘ
• A další.
Univerzita obrany

Současná situace v oblasti
robotiky v AČR
• Není sjednoceno vývojové úsilí
• Nadčasovost dané problematiky spojená s neustálou redukcí armádního rozpočtu
• Výzkumně-vývojové projekty v programech 908040 a dalších jsou tematicky a nesystémově roztříštěné
• Iniciativu přebírá akademická složka – budování centra CAFR (Center for Advanced Field Robotics – ČVUT, VUT, UO, VŠB, VOP CZ)
• Dílčí podpora MO
• Perspektiva a implementace vojenské robotiky je „legislativně zakotvena“ ve strategickém dokumentu rozvoje resortu obrany - Bílá kniha 2011

Futuristický pohled na bojiště 21. století z devadesátých let minulého století
Futuristický pohled na bojiště 21. století z devadesátých let minulého století
IMOPAT VIDEO

Robotické prostředky v AČR
a stručný pohled do historie
Současné robotické prostředku v AČR:
UGV •BOZENA
•tEODor
•TALON
UAV •RQ11 B RAVEN
•SKYLARK I-LE
•WASP
•SOJKA – do roku 2010

Historie Historie vojenských robotů se
datuje již do doby před a
zejména v průběhu 2 světové války: o 1898 - Nikola Tesla - rádiově řízený člun
o Německo 2. sv. válka - Goliath
o Sovětské teleoperované tanky-T26
• V průběhu studené války vzniklo mnoho prototypů
zejména létajících průzkumných systémů (UAV)
• 1980s – První experimenty s kráčejícími roboty ve
vojenství – nízká spolehlivost
• 2002 – První souboj mezi MQ-1Predator UAV
(stinger) a MIG-25 pilotovaný iráckým pilotem

The Goliath

Sovětské rádiově
řízené tanky

BOZENA 4 • verze 4 • Úspěšně použita v
zahraničních operacích při odminování - Jordánsko.
• Délka prostředku 5 280 mm (3305 mm)
• Šířka 2 840 mm (1 985 mm)
• Výška 2 270 mm
• Hmotnost 6 983 kg (5 576 kg)
• Šířka odminovacího pásu 2,2 m
• Hloubka odminování max 250 mm
• Odolnost 9 kg TNT (PT miny)
• Rotace odminovací lišty 350 – 500 min-1
• Pracovní plocha (max) 2 500 m2 za hodinu
• Průchodnost vegetací– průměr/výška 30 cm/4 m
• Kapacita nádrže 140 l
• Max. rychlost 9 km/h
• Dálkové řízení – (max) 5 000 m/11 h

BOZENA v.4

Úspěšně použita v zahraničních operacích při odminování - Jordánsko, Afghanistan, Afrika, Kambodža, Irák a další. • Délka prostředku 7 320mm (5 020mm)
• Šířka 3 350 mm (2 400mm)
• Výška 2 270 mm
• Hmotnost 12 340kg (10 240kg)
• Šířka odminovacího pásu 2,6 m
• Hloubka odminování 300/350mm (cepák/fréza)
• Odolnost 9 kg TNT (PT miny)
• Rotace odminovací lišty 300 – 500 min-1
• Pracovní plocha (max) 5 000 / 6 000 m2 (cepák/fréza) za hodinu
• Průchodnost vegetací– průměr/výška 35 cm/5 m
• Kapacita nádrže 270 l
• Max. rychlost 9 km/h
• Dálkové řízení – (max) 5 000 m/11 hrs
BOZENA 5

Bozena v.5

tEODor • Robot je určen k prvotnímu průzkumu nebezpečného materiálu (možného
improvizovaného výbušného systému) ve volných prostorech, budovách, pod dopravními prostředky apod. nebo ke zřízení přístupu do uzavřených prostorů.
• Je vybaven dálkovým ovládáním s videokamerou, rentgenovým zařízením k prohlížení nebezpečného nebo podezřelého předmětu, hydraulickým ramenem k manipulaci s nebezpečným materiálem, rozstřelovacím zařízením k ničení nástražných výbušných systémů, zmrazovacím zařízením k zamezení přechodu iniciačního impulzu od roznětného prvku k výbušnině.
• Robot může řezat plech, vrtat otvory,
rozbit okno a odtáhnout vozidlo.
• Robot tEODor je ve výzbroji AČR od března 2005.
TECHNICKÁ DATA
Rozměry:
Délka: 1300 mm
Šířka: 680 mm
Výška:
• rozložený: 1100 mm
• čelist vertikálně/horizontálně: 480/240 cm
Vlastní hmotnost s manipulátorem
a bateriemi: 360 kg
Rychlost: 0 – 50m/min.
Schopnost jízdy do stoupání po schodišti
s max. zatížením: 32°

tEODor

• TALON– malý pásový robot určený pro široké spektrum operačního nasazení od průzkumu až po bojovou činnost
• Hmotnost 45-27kg
• Jeden z nejrychlejších robotů v dané třídě
• Schopnost překonávat písčité plochy, vodu, sníh do 30cm a běžné schody
• Cena cca $230,000
• Možnost uchycení širokého spektra příslušenství včetně granátometu, kulometu nebo odstřelovačské pušky
TALON
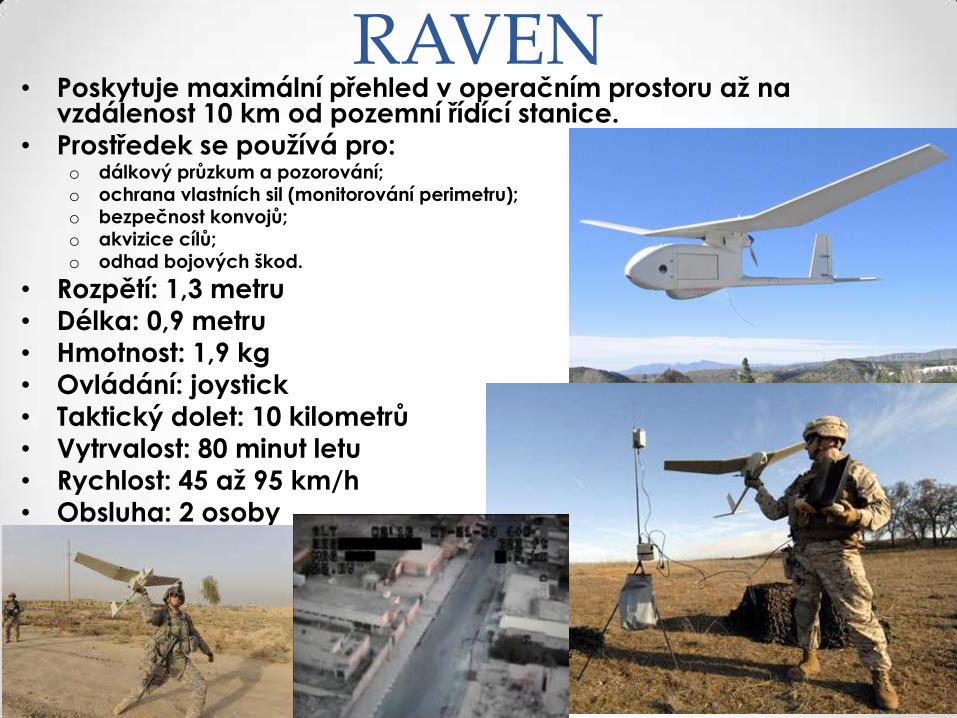
RAVEN • Poskytuje maximální přehled v operačním prostoru až na
vzdálenost 10 km od pozemní řídící stanice.
• Prostředek se používá pro: o dálkový průzkum a pozorování; o ochrana vlastních sil (monitorování perimetru); o bezpečnost konvojů; o akvizice cílů; o odhad bojových škod.
• Rozpětí: 1,3 metru
• Délka: 0,9 metru
• Hmotnost: 1,9 kg
• Ovládání: joystick
• Taktický dolet: 10 kilometrů • Vytrvalost: 80 minut letu
• Rychlost: 45 až 95 km/h
• Obsluha: 2 osoby

SKYLARK I-LE • Vzhledem k rostoucím požadavkům na operační
využití byl pořízen systém SKYLARK I-LE.
• Jedinečný ve své třídě díky svým technickým
parametrům.
• Byl dodán ve prospěch 601 skss
• Byl úspěšně použit v misi 601 skss ISAF v roce 2011.
• Neznalost mnoha aspektů při provozu vedla ke zřícení
a destrukci letounu.

SKYLARK I-LE
TTD
• Provozní teplota - 20 až + 50°C • Napájení UAV – určený bateriový box • Napětí baterií 27 V (jmenovité) • Minimální napětí pro vzlet
27,5 V • Minimální napětí pro let 25 V
• Mezní pokles napětí 21 V - vypnutí motoru
• 19 V – UAV provede automatické okamžité přistání
• Přesnost přistání do 50 m od zadaného bodu
• Úhel natočení manipulátoru antény +/- 200° od středové osy
• Dosahy antén 3 km – krátká všesměrová
• 6 km – dlouhá všesměrová • 10 km – směrová
UAV Hmotnost 6,3 kg – denní konfigurace 6,5 kg – noční konfigurace
Výdrž v letu až 150 min. Rychlost letu 43 km/hod – minimální 68 km/hod – střední 56,54 mil za hodinu – maximální Klouzavý poměr při zastavení 1:15 Maximální nadmořská výška 4
570 m Letová výška - 400 až + 1200 m od výšky Povětrnostní podmínky Směr vzletu vždy proti větru
Maximální rychlost větru při vzletu 12,8 m/s Srážky - drobný déšť

WASP • WASP - technicky vychází z UAV RAVEN.
• WASP je v AČR používání jednotkou leteckých návodčích jako monitorovací a průzkumný prostředek.
• TTD parametry systému:
• Rozpětí křídel: 72 cm
• Délka: 24 cm
• Operační nadmořská výška: 46-152 m nad povrchem • Nejnižší nadmořská výška: 23 m
• Rychlost: 32-64 km/h
• Nominální dosah: 3-5 km
• Výdrž: 45 min.
• Otáčení: cca 360° za 20 sekund • Stoupání: 152 m/min.

SOJKA III Sojka III je bezpilotní průzkumný letoun (BPL).
Celý komplet Sojky tvoří:
• 3-4 bezpilotní letouny
• Vozidlo s opr. a skladovací zařízením
• Vozidlo se startovací rampou
• Vozidlo- řídicí a vyhodnocovací středisko
• Malé terénní dohledávací vozidlo s přívěsem
Sojka III je určena pro vzdušný průzkum v reálném čase, sběru optických informací, monitorování dělostřelecké palby, rádiový průzkum, rušení nebo jako vzdušný terč (nosič infračervených zářičů) • Vzlet Sojky - primárně ze startovací rampy, pomocí raketového startovacího zařízení,
Let do rychlosti větru 8 m/s.
• Poloautomatický let dovoluje operátorovi měnit
pomocí smyček autopilota směr a výšku letu.
• Automatický let po lomené čáře může mít až 8
otočných bodů se zadanou výškou letu a azimutem.
• Operátor může do programu letu kdykoliv vstoupit
a přepnout jej na poloautomatický nebo letoun
navrátit do místa startu.
• Přistání - buď za pomoci padáku do rychlosti
200 m/s a výšky minimálně 100 m
• Možnost přistání na spodní části
trupu- za pomoci operátora

SOJKA III • Letoun je vyroben ze skelného laminátu a uhlíkových
kompozitních materiálů.
• Je vybaven CCD TV kamerami, radiovým systémem,
padákem, palubní avionikou a motorem s nádrží.
• Taktický dolet: 60-100 km
• Rychlost: 130-180 km/h
• Operační výška: 50-4000 m
• Délka: 3,78 m
• Rozpětí křídel: 4,12 m
• Vytrvalost letu: 1 - 3 h
• Maximální vzletová
hmotnost 145 kg
• Užitečné zatížení: 20 - 30 kg

Cube-Y6,
Optoelektron
a Sokol
VTÚL a PVO
Optoelektron Hmotnost cca 6,5Kg
Sokol Hmotnost cca 20Kg
Cube-Y6

TCX-G1


DMRK dálkový monitor radiační
kontaminace

• DMRK – před 3D LIDAR instalací

DMRK
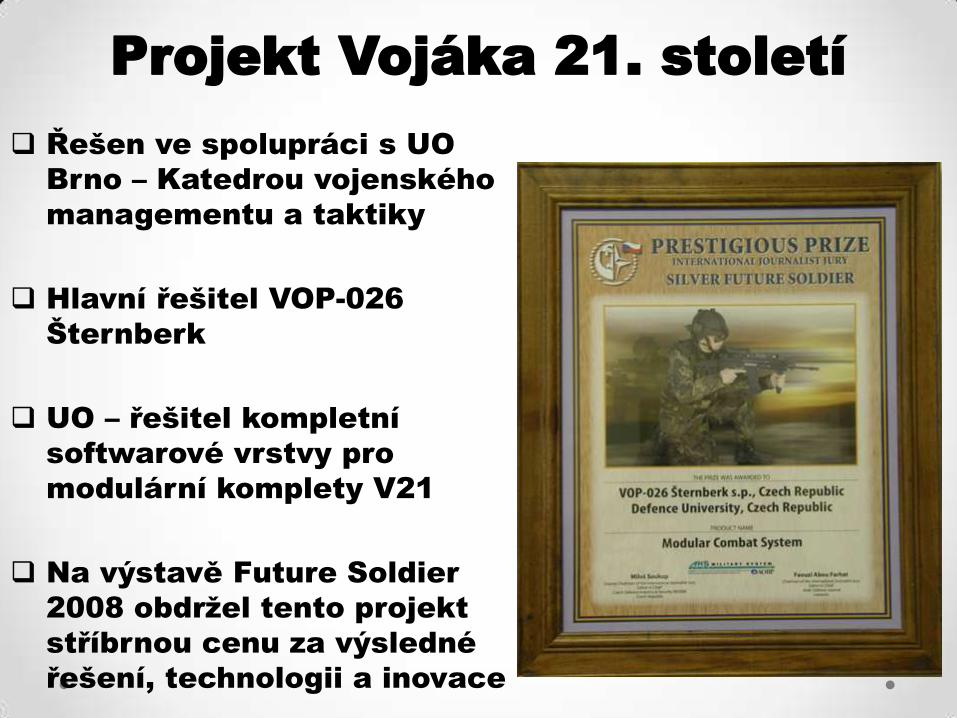
Řešen ve spolupráci s UO
Brno – Katedrou vojenského
managementu a taktiky
Hlavní řešitel VOP-026
Šternberk
UO – řešitel kompletní
softwarové vrstvy pro
modulární komplety V21
Na výstavě Future Soldier
2008 obdržel tento projekt
stříbrnou cenu za výsledné
řešení, technologii a inovace
Projekt Vojáka 21. století

Integrovaný komplet vojáka
armády USA „Land Warrior“
• snížení počtů vojáků při současném
nárůstu jejich výkonu a efektivity
• začlenění vojáka a malé jednotky do
struktury digitalizovaného bojiště a
architektury C4ISTAR
• aplikace nových přístupů k vedení bojové
činnosti, organizace a vybavení
Cíl zavádění integrovaných kompletů vojáka 21. století
Cíl zavádění integrovaných kompletů vojáka 21. století

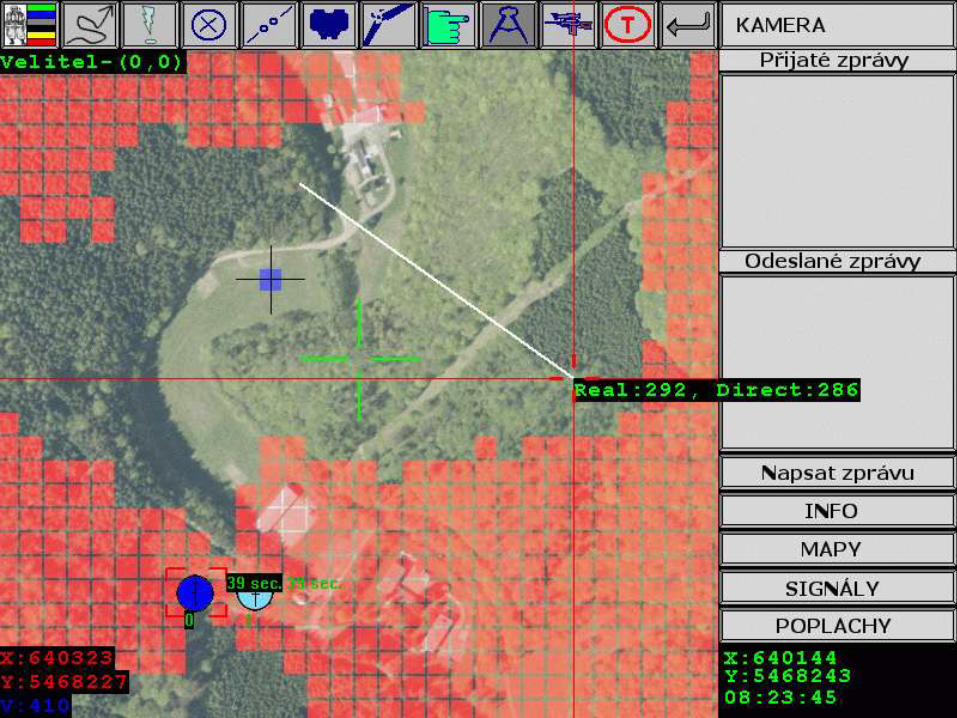
Charakteristika systému V21, zejména jeho SW vrstvy
• Integrace do struktury digitalizovaného bojiště
• Komplexní přehled o situaci na bojišti
• Digitalizace taktické administrativy (historie, kontrola doručení)
• Digitální hlasová komunikace
• Digitální přenos videa v reálném čase
• Systém včasného varování, poplachů a signálů
• Úkolování podřízených velitelem, plán úkolů
• Přehled velitele o stavu a situaci podřízených
• Podpora procesu rozhodování - taktická optimalizace
přesunu, výpočet viditelnosti a další.
• Dvě nezávislé datové radiové sítě
• Automatická retranslace dat
• Využitelnost pro další ozbrojené nebo záchranné složky


laserový
značkovač
Denní optický
zaměřovač náhlavní
komunikačn
í jednotka
přístroj nočního
vidění s hlavovým
zobrazovacím LCD
Ochranná přilba s
identifikačními
senzory
osobní
UKV / VKV
stanice
ovládací a
polohovací
jednotka
datový terminál
s modemem
a GPS/PPS
Zbraňový denní a noční
pozorovací a
zaměřovací systém
podvěsný
granátomet nebo
brokovnice
Přijímací
jednotka
GPS/PPS
Osobní zbraň
řídící jednotka
systému
systém
identifikace
vlastní/nepřítel
balistická vesta s
nosným
systémem ochranné brýle,
nákoleníky, rukavice,
chrániče sluchu a další
ochranné pomůcky
osobní dozimetr,
ochranná maska a
ostatní prostředky
PCHOJ
bateriový blok
s dobíjecími
články
tlumok, vak
na vodu,
potraviny,
vystrojovací a
nosné
prostředky
další volitelné a doplňkové
prostředky pro jednotlivé
moduly kompletu, družstvo,
četu nebo rotu zodolněná
klávesnice ruční zobrazovací LCD
rádiová stanice
UKV / VKV se
zesilovačem
vozidlová a
síťová dobíjecí
stanice Zaměřovací a
pozorovací přístroj
čety, pz družstva
(skupiny)
Jádro systému V21 - MBK

Automatická puška CZ 805
Základní jádro MBK V21

Komunikace • Problémy spolehlivého spojení na velké
vzdálenosti v reálném čase
• Problémy u vysokých frekvencí v taktických podmínkách
• Implementace komerčních technologií není vždy ideální řešení
• Optimální pásmo 350-450 MHz pro vysokorychlostní přenosy v taktických podmínkách
• Velký potenciál retranslace
• Vývoj nového vysokorychlostního rádiového modemu (RACOM nabízí - 0.5Mbit v kanálu širokém 200KHz, -stále nevyhovující)



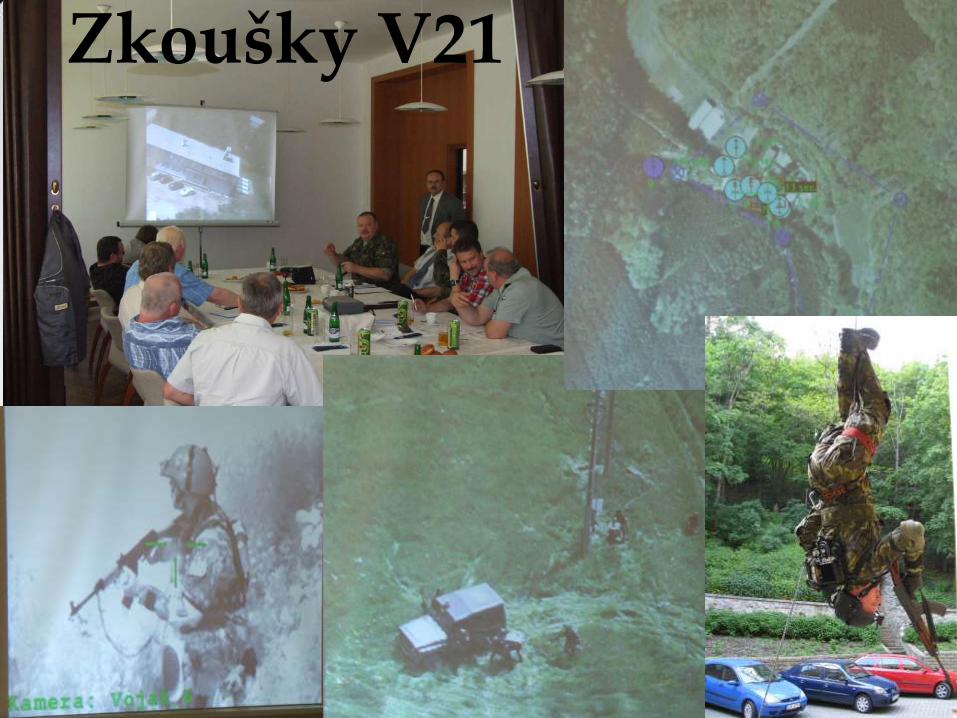
Zkoušky V21

Experimentální robot pro autonomní
navigaci
Simulace
Reálný pokus

LAFETA

Lafeta
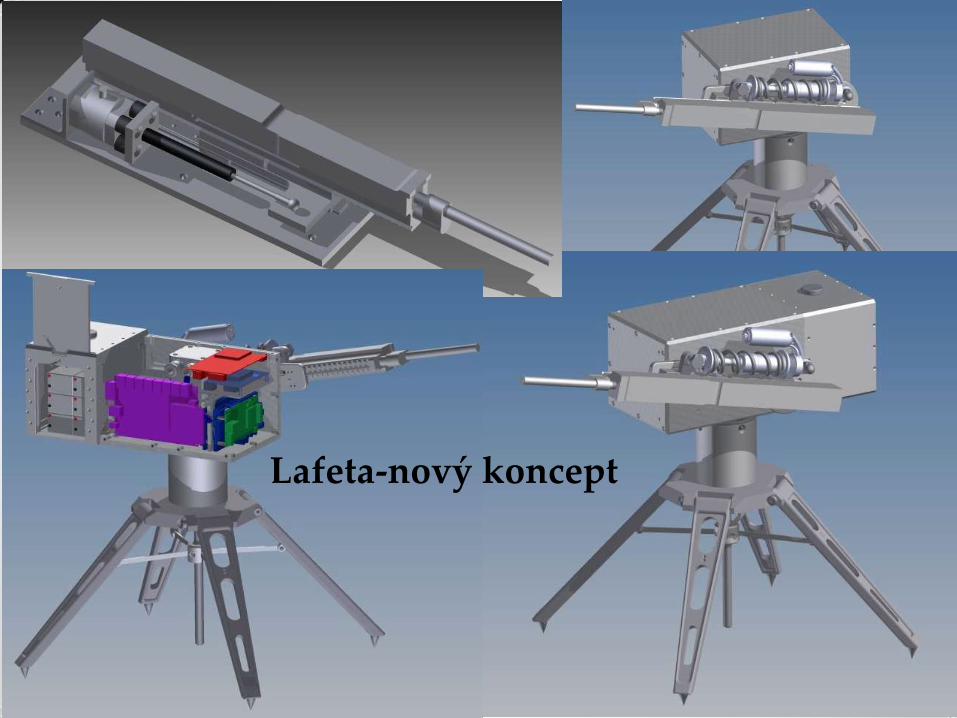
Lafeta-nový koncept

Elektro-opticky naváděný
puškový granát • Komponenta systémů V21
• Možnosti zásahu cíle bez nutnosti jeho
přímé viditelnosti v okamžiku odpálení
střely
• Využitelnost jako optické sondy
• Duální systém navedení – s plochou
dráhou letu, nebo po balistické křivce

Graf průběhu měření jednoho cyklu zážehu pulzní mechaniky
Graf průběhu měření deseti cyklů zážehu pulzní mechaniky
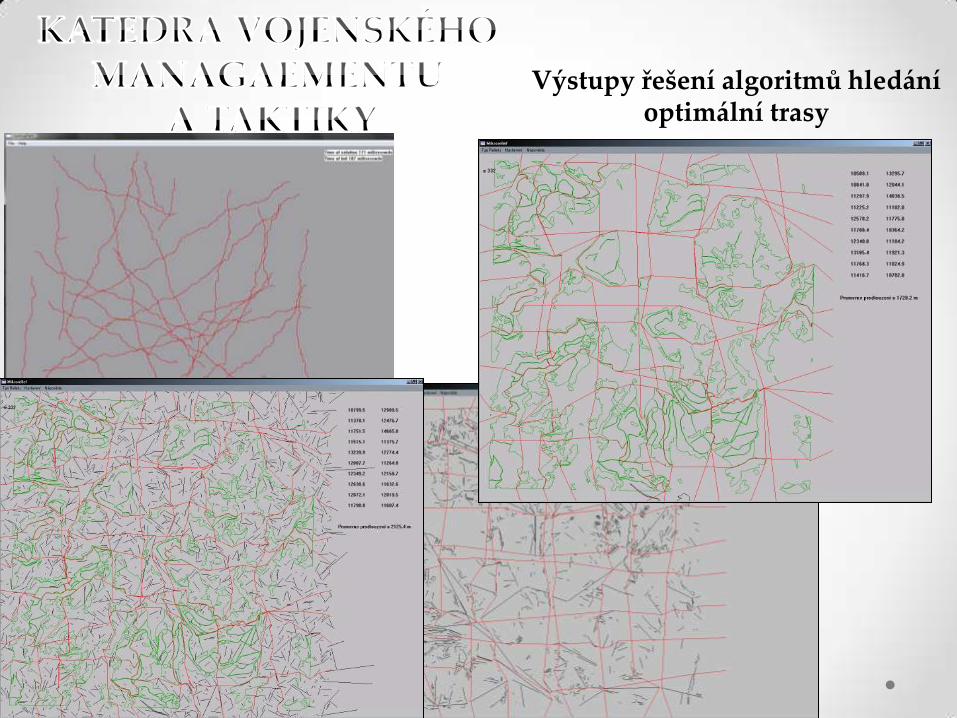
Výstupy řešení algoritmů hledání optimální trasy

vývoj software pro
Operačně - taktické úlohy optimalizace manévru

vývoj software pro řešení Operačně-taktických úloh
rozložení váhového grafu pragmatičnosti manévru

Optimalizace prostoru pro zaujetí léčky

Vývoj sw pro 3D vizualizaci

vývoj sw pro taktickou 3D vizualizaci bojiště

VBS-2
SIMULATOR

• plně interaktivní taktický virtuální simulátor,
• řadí se do kategorie tzv. „Serious Games“ (doslova „vážných her“),
• zaměřen na přípravu všech příslušníků pěších, výsadkových, mechanizova-
ných a tankových jednotek a jednotek námořní pěchoty od střelce až po velite-
le roty (praporu) pro plnění úkolů v soudobých operacích (cca 100 rolí),
• umožňuje velmi realisticky simulovat všechny druhy boje, přesuny, jiné
taktické činností včetně činností realizovaných při plnění operačních úkolů
v operacích NATO na podporu míru resp. mírových operací v souladu
s kapitolou VI. a VII. Charty OSN,
• specifikou simulátoru je orientace na co nejreálnější simulací operačního
prostředí soudobých operací s prvky asymetrického boje probíhajících v Iráku
a v Afghánistánu,
• otevřená architektura umožňuje přidávat další obsah různého druhu (prostředí,
vozidla a jednotky, zbraně, chování entit, skriptované funkce) a modularizaci
podle charakteru výcviku (modul CFF, modul CAS),

Základní moduly simulátoru VBS2

As Samawah Green Zone

Obyvatelstvo, pracující a bojovníci v Afghánistánu a Iráku

IED
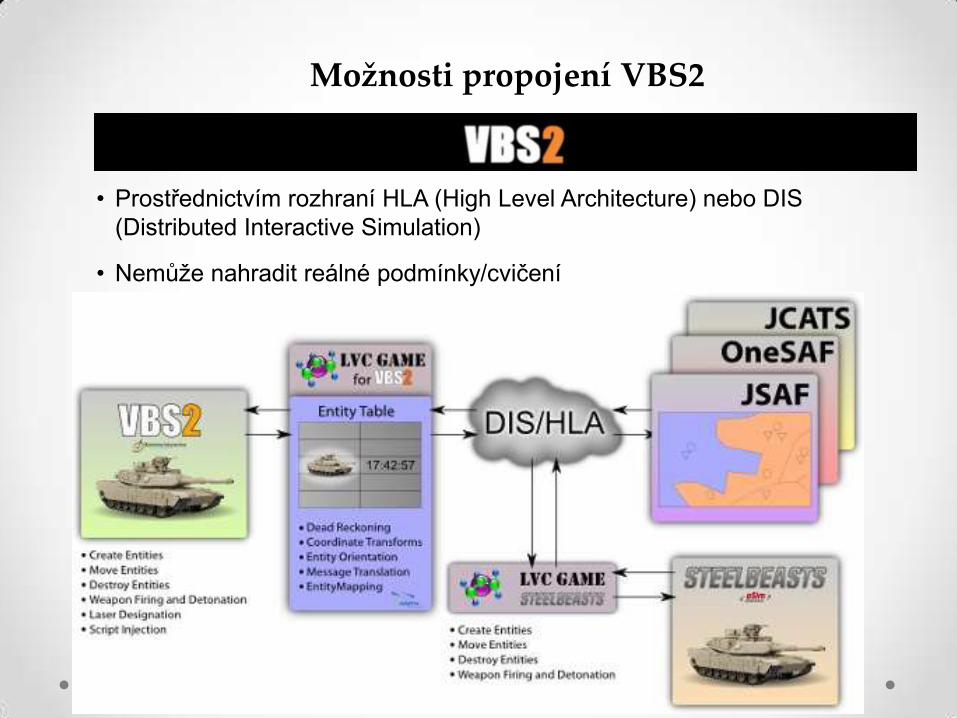
Možnosti propojení VBS2
• Prostřednictvím rozhraní HLA (High Level Architecture) nebo DIS
(Distributed Interactive Simulation)
• Nemůže nahradit reálné podmínky/cvičení

Autonomous
Behaviors
Human – Robot Interface
Safe Operations
360° Situational Awareness
Vertical IPM
Education Outreach
Joint Center for Robotics Focus Areas Spolupráce s US ARMY - TARDEC

General Dynamics a autonomní provedení mise v oblasti UGV

Nejpoužívanější/nejznámější roboti
v současných vojenských operacích (Poznámka : Armáda USA v Afghánistánu má nasazeno více než 20 000 robotů)
• Dragon Runner/ThrowBot
• PackBot
• TALON
• UAV RAVEN
• UAV Skylark
• UAV Shadow
• UAV Predator

Dragon Runner • Vojenský minirobot pro
městský boj a průzkum.
• Čtyřkolý robot.
• Délka 38cm.
• Šířka 25cm.
• Výška 12,5.
• Vyznačuje se vysokou
odolností , snese dopady na
tvrdé plochy rychlostí více jak
70km/h.
• Určen pro nebezpečné oblasti
nedostupné člověku.
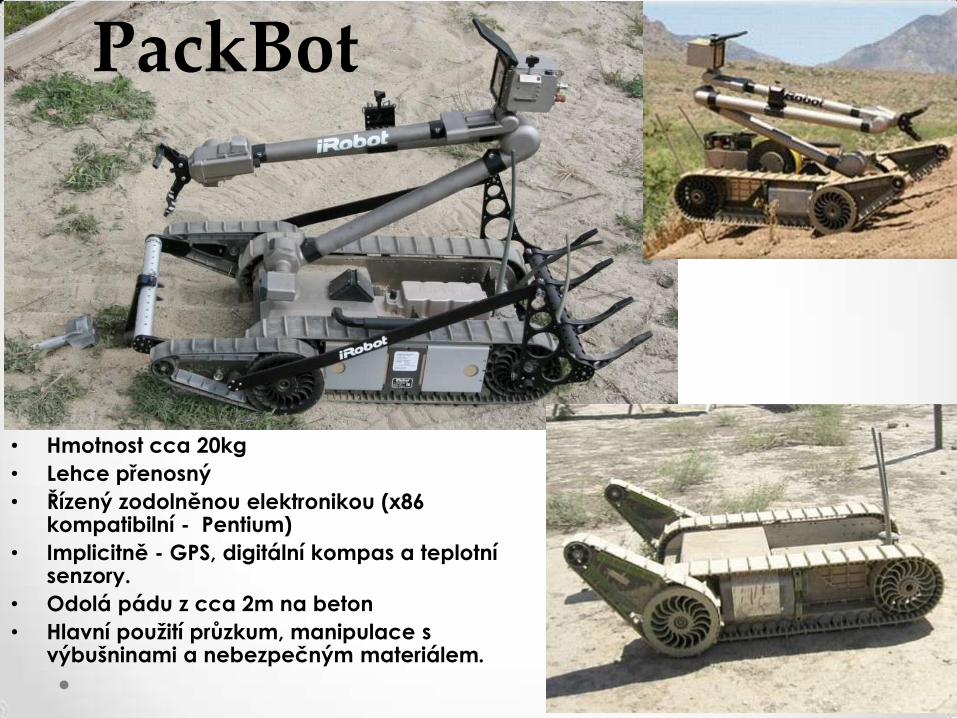
PackBot
• Hmotnost cca 20kg
• Lehce přenosný
• Řízený zodolněnou elektronikou (x86 kompatibilní - Pentium)
• Implicitně - GPS, digitální kompas a teplotní senzory.
• Odolá pádu z cca 2m na beton
• Hlavní použití průzkum, manipulace s výbušninami a nebezpečným materiálem.









Vývojové koncepty
• Crusher
• MULE
• SMSS
• BigDog
• …

MULE Multifunction Utility/Logistics
and Equipment
Hmotnost 907 Kg Předpokládaná cena US $300,000 UGV družstva

CRUSHER
Hmotnost 6,5 tuny Užitečný náklad 4 tuny Hybridní pohon Max rychlost 26mph

Squad Mission Support System
(SMSS) • Využívá komerční platformu 6x6 ATV (turbo-diesel) • Užitečný náklad 450 kg
• Určeno pro logistické a
podpůrné úkoly • V současnosti absolvovala
platforma úspěšné testování v Afganistanu
• Hmotnost 1723kg • Dojezd 205km • Délka 3,68m • Šířka 1,8m • Výška 2,15m

BigDog
délka 0.91 m, výška 0.76 m, hmotnost 110 kg, rychlost 6.4 km/h, nosnost 150 kg, stoupání 35 stupňů

Závěrem • Výzkum a vývoj v dané oblasti je možné
realizovat v ČR pouze v kontextu širší spolupráce a zapojení více institucí (VŠ a průmysl)
• V případě AČR se UAV systémy pomalu etablují, nicméně v případě UGV se jedná o relativně nadčasovou záležitost
• Budoucnost pravděpodobně spočívá v kooperativní robotice a integraci se systémy V21 a vyššími systémy ASVŘ
• Postupný zájem i z komerční sféry




















