Page 1
ČESKE VYSOKÉ UČENÍ TECHNICKÉ V PRAZE
FAKULTA ELEKTROTECHNICKÁ
KATEDRA ŘÍDÍCÍ TECHNIKY
Bakalářská práceČerná skřínka do automobilu
Vypracoval : Ladislav RůžičkaVedoucí práce : Ing. Pavel Růžička
červen 2006
ČVUT PRAHA
Page 3
Poděkování
Chtěl bych poděkovat a vyslovit uznání všem, kteří mi pomáhali při vzniku této práce.
Především Ing. Pavlu Růžičkovi, vedoucímu této bakalářské práce, za trpělivé vedení a množství
praktických rad.
Zařízení potřebné k této práci bylo pořízeno z prostředků grantu ČR GAČR 102/05/0467.
iii
Page 4
Prohlášení
Prohlašuji, že jsem svou bakalářskou práci vypracoval samostatně a použil jsem pouze
podklady (literaturu, projekty, SW atd.) uvedené v přiloženém seznamu.
V Praze dne ………………………. …………………………………….podpis
iv
Page 5
Anotace
Bakalářská práce popisuje návrh „Černé skřínky“ do auta. Jádrem zařízení je procesor
PXA255 od firmy Intel, který je zabudován na zásuvném modulu. Na modulu je nainstalován
operační systém Linux 2.4. Hlavními obvody zařízení jsou rozhraní pro USB Host (pomocí, níž
bude k desce připojena kamera), rozhraní pro komunikaci s automobilem je sběrnice CAN
(Controller Area Network) a sada akcelerometrů a A/D převodníků.
Návrh se skládá z několika částí : 1. určení parametrů zařízení, 2. výběr vhodné kamery
(vyhovujícím našim požadavkům), 3. návrh zvoleného zařízení a jeho realizace. Pro lepší ilustraci
je práce doplněna přílohami.
Annotation
This bachelor degree work describes a design of a black box in a car. Kernel device is based
on processor PXA255 produced by the firm Intel, which is installed on a sliding module. The
operating system Linux 2.4 is installed on the module. The main circuits of the device are interfaces
for USB Host (with the help of which a camera will be connected to the board), the interface for the
communication with the car is the bus CAN (Controller Area Network) and a set of acceleration
meters and A/D convertors.
The design consists of several parts: 1. the determination of parameters of the device, 2. the
selection of a suitable camera meeting our requirements, 3. the design of a selected device and its
implementation. As an illustration the work is completed with inserts.
v
Page 6
Obsah
1. Úvod 1
2. Informace o zařízení 2
2.1 Charakteristika zařízení......................................................................................................2
2.2 Zařízení na trhu...................................................................................................................4
2.3 Periferie a rozhraní..............................................................................................................5
3. CAN (Controller Area Network) 7
3.1 Popis sběrnice.....................................................................................................................7
3.1.1 Úvod.........................................................................................................................7
3.1.2 Základní struktura a vlastnosti sběrnice...................................................................7
3.1.3 Prvky protokolu CAN...............................................................................................9
3.1.4 Komunikace po sběrnici CAN.................................................................................10
3.1.4.1 Datový rámec..........................................................................................11
3.1.4.2 Požadavkový blok...................................................................................12
3.1.4.3 Chybový blok..........................................................................................13
3.1.4.4 Zpožďovací blok.....................................................................................13
3.2 CAN návrh rozhraní...........................................................................................................14
3.2.1 Budič sběrnice CAN – PCA82C251........................................................................14
3.2.2 CAN Controller – CC750........................................................................................14
3.2.3 Obvodové řešení......................................................................................................16
4. USB Host 17
4.1 ISP 1161A..........................................................................................................................17
4.1.1 Funkční blokový diagram a popis signálů...............................................................17
4.1.2 Charakteristika obvodu............................................................................................18
4.2 Obvodové řešení................................................................................................................19
5. Kamera 20
5.1 Optický senzor – VS6650..................................................................................................20
5.2 Grafický procesor – STV0976...........................................................................................20
5.3 Evaluation Kit – MOB-976/650.........................................................................................21
5.4 Kompatibilita datové propustnosti.....................................................................................22
6. Akcelerometry a A/D převodníky 25
6.1 Akcelerometry....................................................................................................................25
6.1.1 Funkční blokový diagram........................................................................................25
vi
Page 7
6.1.2 Charakteristika senzoru...........................................................................................26
6.2 A/D převodníky.................................................................................................................26
6.2.1 Funkční blokový diagram a popis signálů...............................................................27
6.2.2 Charakteristika obvodu............................................................................................27
6.3 Stanovení parametrů akcelerometrů a ADC......................................................................28
6.4 Obvodové řešení................................................................................................................28
7. Realizace modelu zařízení 30
8. Závěr 31
9. Seznam obrázků 32
10. Literatura 33
11. Přílohy 34
vii
Page 8
1. Úvod
Hlavním úkolem této práce je vytvořit návrh zařízení pro zaznamenávání údajů krátce
před dopravní nehodou a během ní. Cílem je shromáždit dostatečné množství informací
k pozdějšímu vyhodnocení příčin nehody a popřípadě k určení viníka.
Tato zařízení se již řadu let využívají v moderních typech automobilů dodávaných do
USA nebo Kanady. Velké automobilky například Ford, Isuzu, General Motors a Toyota již
montují tato zařízení do svých nových automobilů dodávaných výhradně na americký trh.
Prozatím se tyto společnosti neodhodlaly dodávat tato zařízení do Evropy, důvod tohoto jednání
by mohl být v legislativě evropských zemích a poměr ceny tohoto zařízení k ceně automobilu.
Cílem práce je navrhnou zařízení podobné zařízením používaným ve Spojených státech
amerických a Kanadě. Naše „černá skřínka“¨využije jako centrální mozek zásuvný modul od
firmy Voipac, který obsahuje procesor PXA255 od firmy Intel, operační paměť a flash paměť
pro operační systém a program zajišťující správnou funkci zařízení. Tento zásuvný modul je
doplněn o podpůrnou desku, která obsahuje obvody pro sběr a ukládání dat o jízdě.
Mezi základní obvody patří USB Controller, obvody pro přístup k průmyslové sběrnici
CAN a v neposlední řadě obvody pro měření zrychlení - akcelerometrický senzor a analogově-
číslicový převodník.
Cílem této práce je navrhnou zařízení srovnatelné se zařízením, které je již na trhu.
V budoucnu je možné ho vylepšit o prvky umožňující přesnou lokalizaci vozidla pomocí GPS a
napojit zařízení na mobilní telekomunikační síť, aby mohlo samo zavolat pomoc při nehodě.
Dále ho vylepšit o radiomaják, který by v případě nehody varoval ostatní vozidla v okolí.
Následující kapitoly popisují kriteria návrhu zařízení, popis použitých měřících
a rozšiřujících obvodů, popis jednotlivých komunikačních rozhraní a komunikačního protokolu
CAN2.0A/B.
1
Page 9
2. Informace o zařízení
Tato kapitola se zabývá možnostmi využití „černých skříněk“ (dále jen. „záznamové
zařízení“) v osobních i nákladních automobilech, dále se zabývá jejich dostupností na trhu a
důvody, proč byla tato zařízení použita.
2.1 Charakteristika zařízení
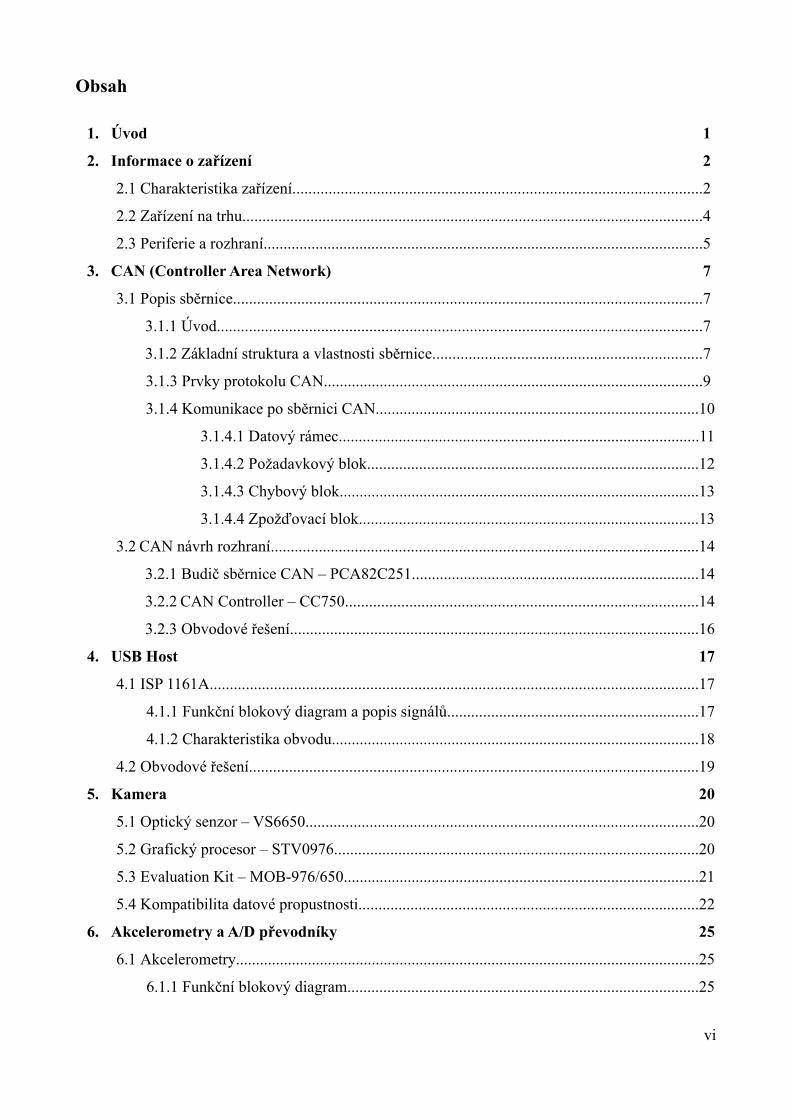
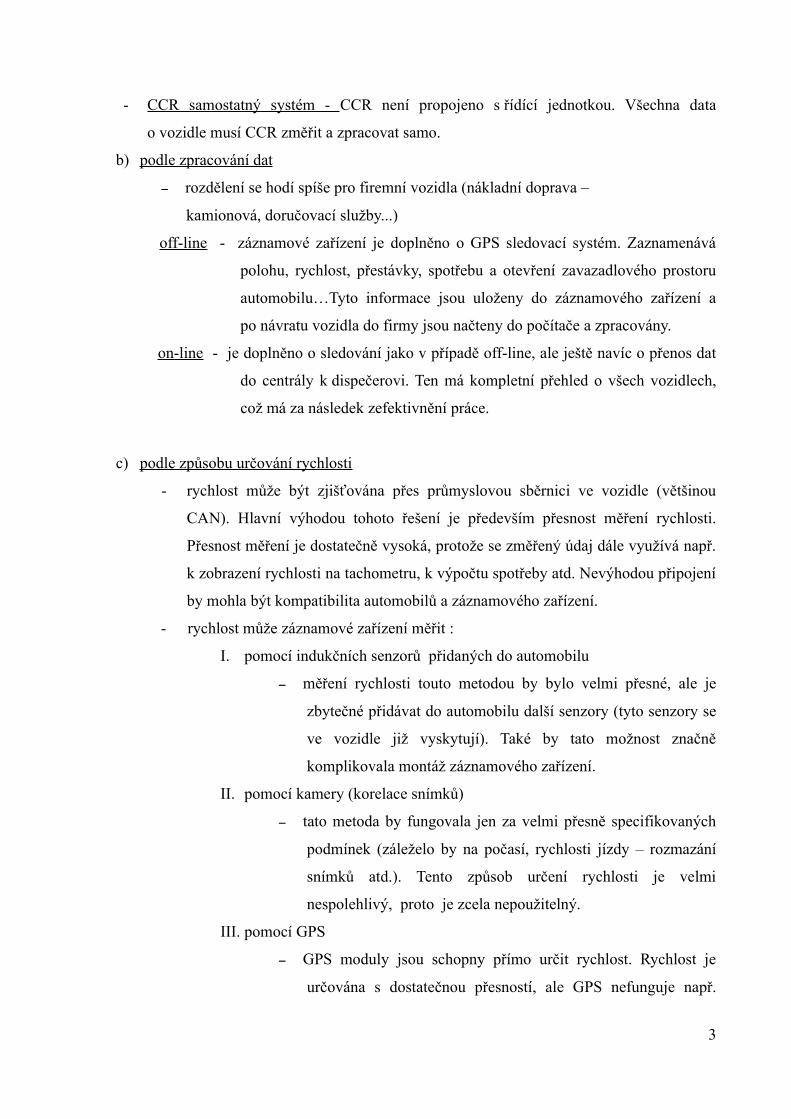
Záznamová zařízení se dají rozdělit podle několika kritérií :
a) podle stupně integrace do vozidla
Obr. 1. : Rozdělení záznamových zařízení
- CCR integrované do řídícího počítače – záznam dat a videosignálu provádí řídící
jednotka automobilu.
- CCR přípojný modul - automobil není vybaven zařízením CCR a toto zařízení je
instalováno dodatečně.
- CCR připojeno sběrnicí - CCR modul je připojen přes průmyslovou sběrnici, s jejíž
pomocí získává kritická data o automobilu (rychlost, zrychlení, natočení kol…).CCR
modul si tato data musí vyžádat od řídící jednotky. Všechna moderní auta jsou již
připravena na připojení CCR zařízení (auta jsou vybavena průmyslovou sběrnicí
pro přenos dat a komunikaci jednotek)
2
záznamové zařízení
(CCR – Car Crash Recorder)
CCR integrované do řídícího počítače
CCR přípojný modul
CCR připojeno sběrnicí
CCR samostatný systém
Page 10
- CCR samostatný systém - CCR není propojeno s řídící jednotkou. Všechna data
o vozidle musí CCR změřit a zpracovat samo.
b) podle zpracování dat
– rozdělení se hodí spíše pro firemní vozidla (nákladní doprava –
kamionová, doručovací služby...)
off-line - záznamové zařízení je doplněno o GPS sledovací systém. Zaznamenává
polohu, rychlost, přestávky, spotřebu a otevření zavazadlového prostoru
automobilu…Tyto informace jsou uloženy do záznamového zařízení a
po návratu vozidla do firmy jsou načteny do počítače a zpracovány.
on-line - je doplněno o sledování jako v případě off-line, ale ještě navíc o přenos dat
do centrály k dispečerovi. Ten má kompletní přehled o všech vozidlech,
což má za následek zefektivnění práce.
c) podle způsobu určování rychlosti
- rychlost může být zjišťována přes průmyslovou sběrnici ve vozidle (většinou
CAN). Hlavní výhodou tohoto řešení je především přesnost měření rychlosti.
Přesnost měření je dostatečně vysoká, protože se změřený údaj dále využívá např.
k zobrazení rychlosti na tachometru, k výpočtu spotřeby atd. Nevýhodou připojení
by mohla být kompatibilita automobilů a záznamového zařízení.
- rychlost může záznamové zařízení měřit :
I. pomocí indukčních senzorů přidaných do automobilu
– měření rychlosti touto metodou by bylo velmi přesné, ale je
zbytečné přidávat do automobilu další senzory (tyto senzory se
ve vozidle již vyskytují). Také by tato možnost značně
komplikovala montáž záznamového zařízení.
II. pomocí kamery (korelace snímků)
– tato metoda by fungovala jen za velmi přesně specifikovaných
podmínek (záleželo by na počasí, rychlosti jízdy – rozmazání
snímků atd.). Tento způsob určení rychlosti je velmi
nespolehlivý, proto je zcela nepoužitelný.
III. pomocí GPS
– GPS moduly jsou schopny přímo určit rychlost. Rychlost je
určována s dostatečnou přesností, ale GPS nefunguje např.
3
Page 11
v tunelech, hlubokých údolí atd. Tato omezení jsou pro náš
návrh nepřijatelná.
Pro námi zpracovaný návrh byla zvolena tato koncepce :
Záznamové zařízení bude připojeno k vozidlu pomocí průmyslové sběrnice CAN, s jejíž
pomocí bude provádět zjišťování rychlosti. Naměřená data budou zpracovávána formou off-
line.
Koncepce pro návrh byla zvolena po dohodě s vedoucím bakalářské práce.
2.2 Zařízení na trhu
Jak je uvedeno v úvodu, záznamová zařízení se především prodávají a montují do automobilů
v USA a Kanadě. Software pro dekódování údajů zajišťuje kalifornská společnost Vectronix.
V podobě zařízení známého jako Crash Data Retrieval System si jej lze pořídit za dva a půl
tisíce dolarů, což je v přepočtu na českou korunu asi sedmdesát pět tisíc korun. Když
porovnáme cenu průměrného automobilu v České republice s cenou Crash Data Retrieval
Systemu, je toto zařízení pro průměrného motoristu nadstandní. Masové nasazení tohoto
zařízení v naších zemích, bude při této ceně problematické. Firmy Ford, Isuzu, General Motors
nejsou pravděpodobně ochotny z tohoto důvodu dodávat tato zařízení do Evropy. Je také
možné, že neochota dodávat tato zařízení do Evropy je dána legislativou v evropských zemích.
Bohužel přesný důvod není známý.
Důvodem, který vedl americké automobilky k zavedení záznamového zařízení, byly
časté námitky řidičů ohledně selhání bezpečnostního vybavení. Řidiči například tvrdili, že
příčinou nehody bylo nechtěné otevření airbagu a vinu přičítali výrobcům. Což již po analýze
záznamu „černé skřínky“ není možné, protože záznam přesně ukáže, co se vlastně stalo.
Další důvod zavedení záznamového zařízení ani tak nesouvisí s dopravními nehodami,
jako s vyplácením životních pojistek. Kamera není v tomto případě nasměrována ven z vozidla,
ale naopak na řidiče. Aby se předešlo vyplácení životních pojistek lidem, kteří hazardují se
svým životem např. telefonují za jízdy bez handfree a způsobí nehodu nebo se zcela nevěnují
řízení vozidla.
Klady a zápory záznamového zařízení :
Záznamové zařízení by znamenalo definitivní konec černých jízd služebními vozy. Má
nezanedbatelné výhody při vyšetřování příčin dopravních nehod. Zdokonalováním brzdných
4
Page 12
systémů, které nedovolí kolo zcela zablokovat (ABS), často chybí přesvědčivé důkazy
o podobě brzdné dráhy, z níž by bylo možné vyčíst rychlost jízdy řidiče. S každou generací
automobilů se tento problém zvětšuje. Bez záznamu o rychlosti je obtížné viníky nehod
usvědčit.
Podle zpráv metropolitních policií klesly počty dopravních nehod až o 25%
po “nasazení“ záznamových zařízení. Řidiči jezdili opatrněji a více se soustředili na jízdu.
Záznamová zařízení nemají jen klady, ale i zápory. Jedním z nich je zásah do soukromí
řidiče a celé posádky. Tento argument odpůrců instalace zařízení přestal mít valný význam po
výroku soudu v New Jersey, který se nyní může brát jako precedens. Podle soudního výroku je
shromažďování údajů o jízdě přípustné. Experti na nehody souhlasí. Silnice je veřejným
prostorem, kde si člověk nemůže dělat, co se mu zlíbí. Přesto již někteří řidiči začínají
požadovat, aby měli možnost v určitých momentech záznam údajů vypnout. K tomu se však
američtí výrobci automobilů zřejmě neodhodlají.
2.3 Periferie a rozhraní
Tato část se zabývá určením periferií a jejich technických specifikací, která jsou nutná
pro splnění tohoto návrhu, a také zde určíme rozhraní, které bude zařízení používat. Za hlavní
periferii byla zvolena digitální kamera (z hlediska analýzy prostoru před vozidlem). Jako další
typ periferie by se dalo považovat i vlastní vozidlo, které je připojeno k zařízení.
Kamera– obecné požadavky :
– rychlé rozhraní pro připojení k záznamovému zařízení
– vysoké rozlišení snímků při vysoké frekvenci snímání (focení)
– malá velikost
– malá spotřeba – žádné externí napájení (napájí se po komunikačním
rozhraní)
– určení konkrétních vlastností
– rozhraní : USB – dostatečná rychlost, je možné přes něj napájet
kameru
– frekvence snímání : minimálně 12 sn/s (to znamená 1 snímek na 2 metry
ujeté dráhy při rychlosti 90 km/h)
5
Page 13
– rozlišení : je dáno typem kamery, která splňuje předchozí vlastnosti a je
dostupná na trhu
Vozidlo– musí přesně měřit rychlost (rychlost je přenášena přes průmyslovou sběrnici do palubní
desky - rychloměr => je měřena dostatečně přesně)
– musí být vybaveno průmyslovou sběrnicí (CAN)
Požadavky na vozidlo jsou zákonitě splněny. Zařízení je určeno pro vozidlo Škoda Octavia
(nachází se v laboratoři).
6
Page 14
3. CAN (Controller Area Network)
V této kapitole se budeme zabývat průmyslovou sběrnicí CAN (Controller Area
Network). Seznámíme se s jejím principem a projdeme návrh CAN rozhraní v naší práci.
3.1 Popis sběrnice
3.1.1 ÚvodController Area Network (CAN) je protokol multiplexní sériové komunikace, vzniklý
v laboratořích společnosti BOSCH, vytvořený pro použití v automobilové technice.
CAN se začal vyvíjet v roce 1983 ve vývojových laboratořích společnosti Bosch
a oficiálně byl představen jako komunikační protokol v roce 1986. V následujícím roce se
pro aplikace na trhu objevily první kontroléry od společnosti Philips Semiconductors.
Na přelomu tisíciletí se systém rozšiřuje do evropských automobilů. Pro tyto se stává
standardem.
Základní verze CAN 2.0 získala podobu v roce 1991. Vývojem se modifikovala
do dvou navzájem kompatibilních systémů 2.0A a 2.0B. V roce 1993 je CAN přenesen
do mezinárodního standardu ISO 11898. V naší aglomeraci jsou známy derivace ČSN EN
50325.
3.1.2 Základní struktura a vlastnosti sběrnice
Jednotlivé komunikační uzly musí být propojeny přenosovým médiem. CAN
nepředepisuje ani úrovně ani fyzikální média. Je také důležité věnovat pozornost
impedančnímu přizpůsobení a ochraně proti rušení. V podstatě je množství uzlů pro
komunikaci neomezené, je limitováno jen možnostmi jednotlivých uzlů a výkonovým
zatížením sítě. V protokolu není nutno specifikovat nadřazenost a prioritu jednotlivých uzlů.
Jak poznáme později jsou tyto informace kódovány v přenášené zprávě. Výhodou je možnost
modifikace vystavěné sítě přidáváním nebo ubíráním počtu členů sítě. Využití principu je
například v odstavení zdroje chybných zpráv, nebo naopak přidání uzlu pro diagnostiku
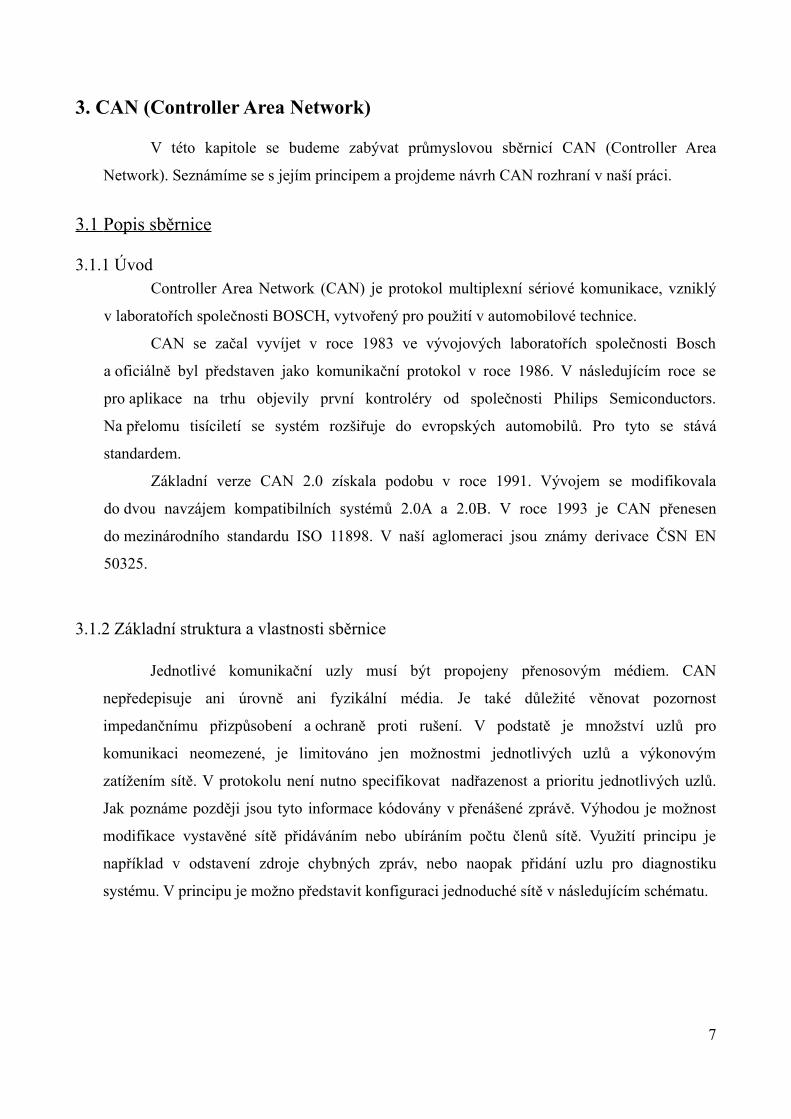
systému. V principu je možno představit konfiguraci jednoduché sítě v následujícím schématu.
7
Page 15
Popis obr. 2. :– CAN_L,CAN_H – vodiče tvořící sběrnici, kde dominant či recessive úroveň na
sběrnici je definována rozdílovým napětím těchto dvou vodičů
(viz. kapitola 3.1.4).
– MCU – kontrolér / CAN MCU – kontrolér s integrovaným budičem sběrnice.
Kontrolér může být integrovaný do procesoru.
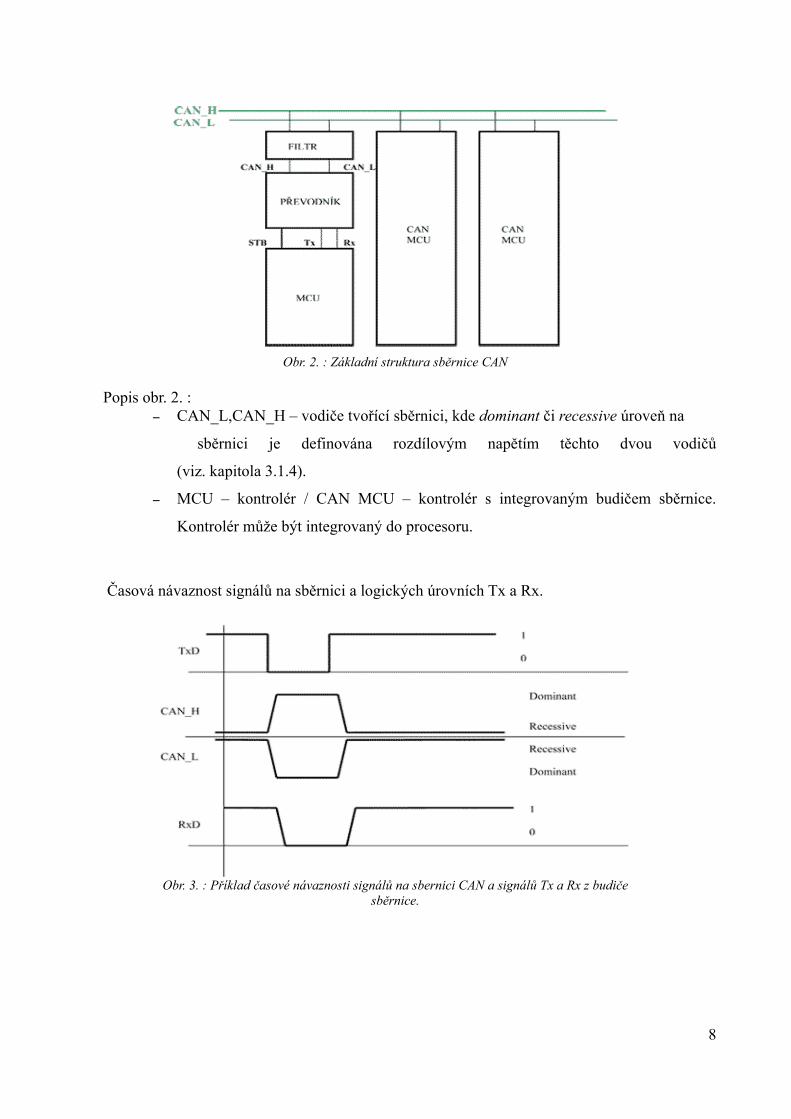
Časová návaznost signálů na sběrnici a logických úrovních Tx a Rx.
8
Obr. 2. : Základní struktura sběrnice CAN
Obr. 3. : Příklad časové návaznosti signálů na sbernici CAN a signálů Tx a Rx z budiče sběrnice.
Page 16
Přenosová rychlost je jedním z dominantních parametrů sériového přenosu. Již
v konfiguraci protokolu bylo cílem dosáhnout komunikační rychlosti 1Mbit/sec. Prakticky
užívané jsou rychlosti do 125 Kbit/sec a nad 250Kbit/sec. Rozlišujeme tak nízkorychlostní
a vysokorychlostní CANbus. Konfigurační rychlost v konkrétní síti je v daných mezích
volitelná a není ji možno měnit ve stanovené aplikaci. Informaci o této rychlosti přenáší
speciální blok.
Vlastnosti, které sběrnice CAN zabezpečuje, mj. relativně vysoká rychlost přenosu,
vysoká spolehlivost a odolnost při extrémních podmínkách (teplota, rušení apod.), nízká cena
komunikačních obvodů, jsou pochopitelně výhodné, takže tento typ komunikační sítě nachází
uplatnění i v dalších oblastech řídící techniky.
Výhody použití CAN
• Vysoká rychlost přenosu dat 1Mbit/s při délce sběrnice do 40m
• Rozlišení zpráv identifikátorem CAN 2.0A 11bitů a CAN 2.0B 29bitů
• Selekce přijímaných identifikátorů zpráv
• Prioritní přístup zabezpečující urychlené doručení významných zpráv
• Diagnostika sběrnice např.: chyba doručení zprávy, chyba CRC, přetečení bufferu
• Značná úroveň zabezpečení přenosu
• Vysoká provozní spolehlivost
• Stále se rozšiřující součástková základna
• Nízká cena
Nevýhody použití CAN
• Omezený počet dat přenášených v rámci jedné zprávy (0 až 8 Byte)
• Prvotní náročnost nastavení registrů CAN sběrnice
3.1.3 Prvky protokolu CAN
Jedním ze stěžejních prvků CAN je chybové zabezpečení. V protokolu se počítá
s těmito prvky:
• Monitorování sběrnice
• Kontrola cyklickým kódem
9
Page 17
• Kontrola vyrovnávacích bitů
• Kontrolní zpráva
Všechna kontrolní místa tak sledují komunikace a podle povahy zajišťují přerušení
komunikace, opakování zprávy nebo generaci chybového protokolu. V případě opakování chyb
z uzlu je možné jeho odstavení od komunikace. Těmito opatřeními je zajištěna
pravděpodobnost výskytu chyby v matematickém vyjádření v úrovni 4,7x10-11 .
3.1.4 Komunikace po sběrnici CAN
Datová komunikační síť CAN původně používala modifikované rozhraní RS 485,
později bylo definováno normou ISO. Tato norma uvádí specifikaci elektrického rozhraní
(fyzická vrstva) a specifikaci datového protokolu (linková vrstva).
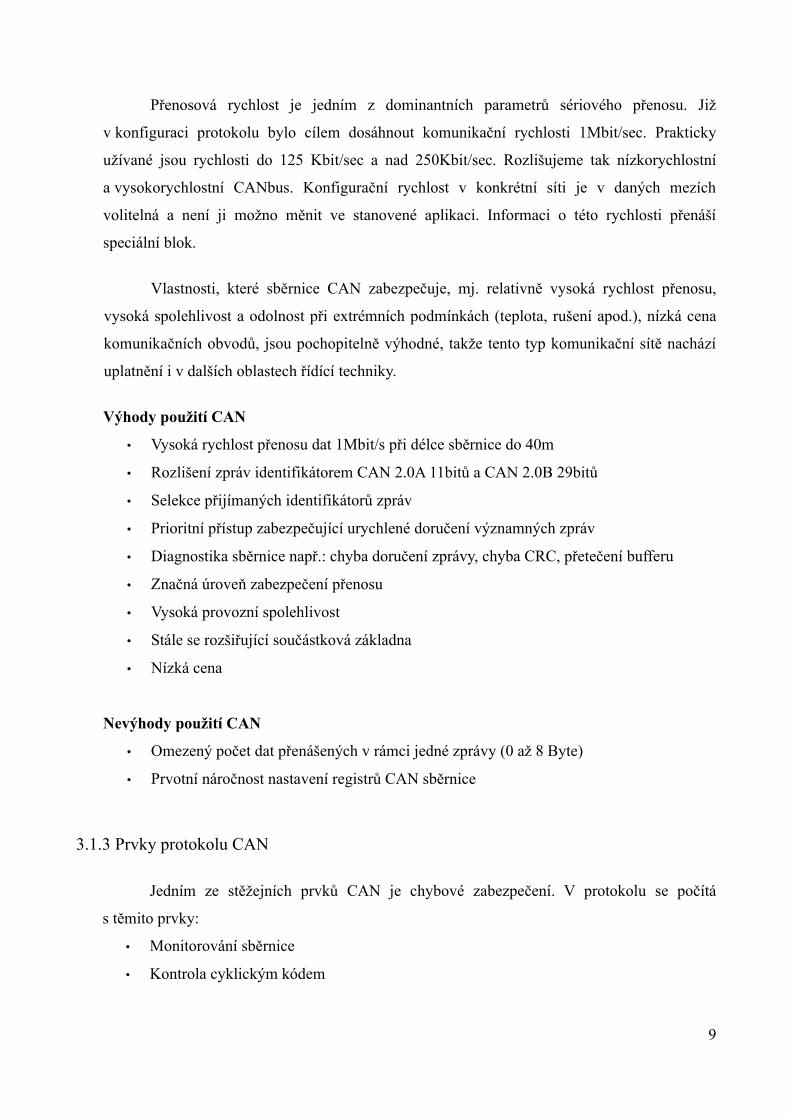
Přenosovým prostředkem je sběrnice tvořená dvouvodičovým vedením, jehož signálové
vodiče jsou označeny CAN_H a CAN_L a zakončovacími rezistory 120 Ω. K této sběrnici se
připojují jednotlivé komunikační uzly obr. 4. Počet těchto uzlů může být až 110 (dle typu
budičů CAN).
Sběrnice využívá dvou logických stavů: aktivní (dominant - dominantní) a pasivní
(recessive - recesivní), přičemž dominantní stav představuje log.0., recesivní stav log.1.
Sběrnice je v dominantním (aktivním) stavu, je-li alespoň jeden její uzel v dominantním stavu.
10
Obr. 4.: Principiální schéma sběrnice CAN.
Page 18
V recesním (pasivním) stavu je sběrnice tehdy, když všechny její uzly jsou v recesním stavu.
V recesním stavu je rozdíl napětí mezi vodiči CAN_H a CAN_L nulový, Dominantní stav je
reprezentován nenulovým rozdílem napětí. Spínače signálových vodičů jsou konstruovány tak,
aby v dominantním stavu na vodiči CAN_H bylo napětí v rozsahu 3,5 až 5V, na vodiči CAN_L
napětí v rozsahu 0 až 1,5V. V recesivním stavu je napětí vodičů CAN_H a CAN_L stejné a je
zajištěno odporovou sítí na vstupu přijímače.
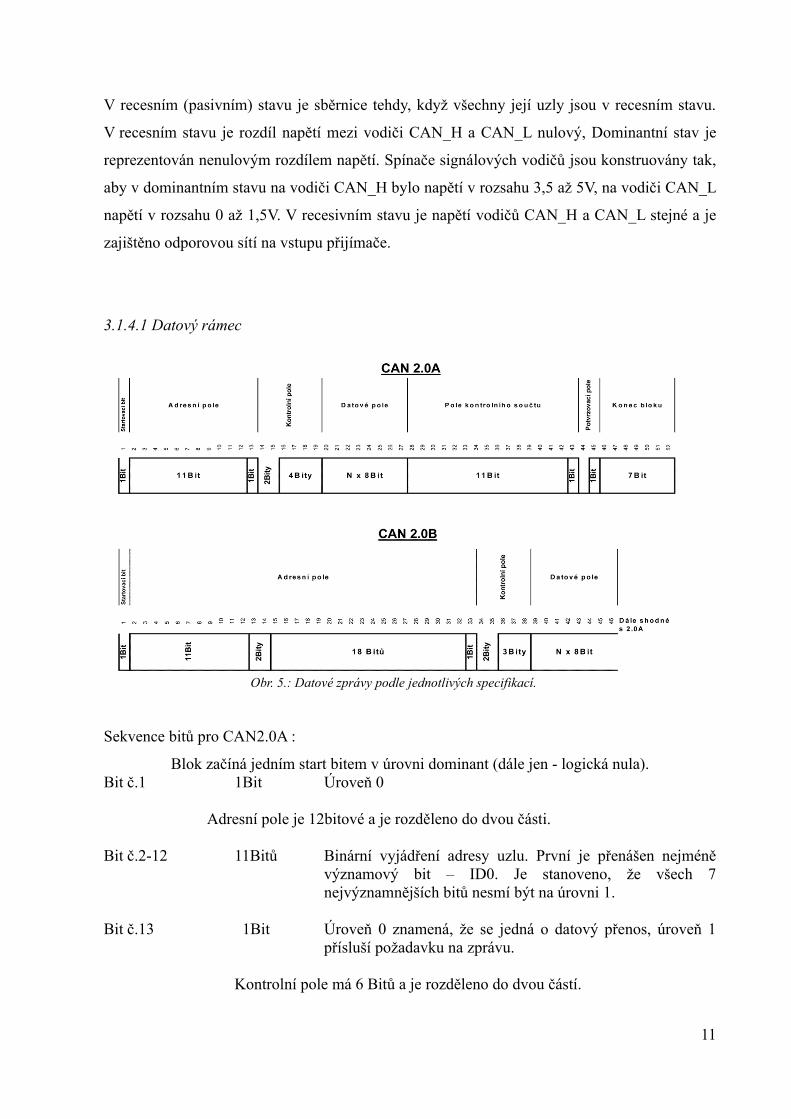
3.1.4.1 Datový rámec
Sekvence bitů pro CAN2.0A :
Blok začíná jedním start bitem v úrovni dominant (dále jen - logická nula).Bit č.1 1Bit Úroveň 0
Adresní pole je 12bitové a je rozděleno do dvou části.
Bit č.2-12 11Bitů Binární vyjádření adresy uzlu. První je přenášen nejméně významový bit – ID0. Je stanoveno, že všech 7 nejvýznamnějších bitů nesmí být na úrovni 1.
Bit č.13 1Bit Úroveň 0 znamená, že se jedná o datový přenos, úroveň 1 přísluší požadavku na zprávu.
Kontrolní pole má 6 Bitů a je rozděleno do dvou částí.
11
Obr. 5.: Datové zprávy podle jednotlivých specifikací.
Page 19
Bit č.14-15 2Bity Rezerva
Bit č.16-19 4Bity Binární číslo udává počet Bytů datového pole = N. První je opět přenášen nejméně významový bit – DLC0. Příklad: 0010 představuje 2 Byty dat.
Datové pole je tvořeno 1 až 8 Byty podle údajů kontrolního pole. V rozložení pole uvažujeme s přenosem jednoho Bytu.
Bit č.20-27 8Bitů Data přenášená MSB.
Kontrolní pole je 15bitové a celý blok je zakončen jedním bitem. Přenášená informace v bloku se srovnává s kalkulovanou hodnotou a v případě neshody vyvolává chybové hlášení.
Bit č.28-42 15 Bitů Údaj kalkulovaný z bitových údajů zahrnuje startovací, adresní, kontrolní bit a datové bity.
Bit č.43 1 Bit Úroveň 1
Potvrzovací pole dává informaci o správnosti převzatého bloku.
Bit č.44 1 Bit Úroveň 1 udává, že se jedná o předávanou zprávu, úroveň 0 potvrzuje správnost přijaté zprávy.
Bit č.45 1 Bit Úroveň 1
Konec bloku je dán sekvencí 7bitů
Bit č.46-52 7 Bitů Úroveň 1
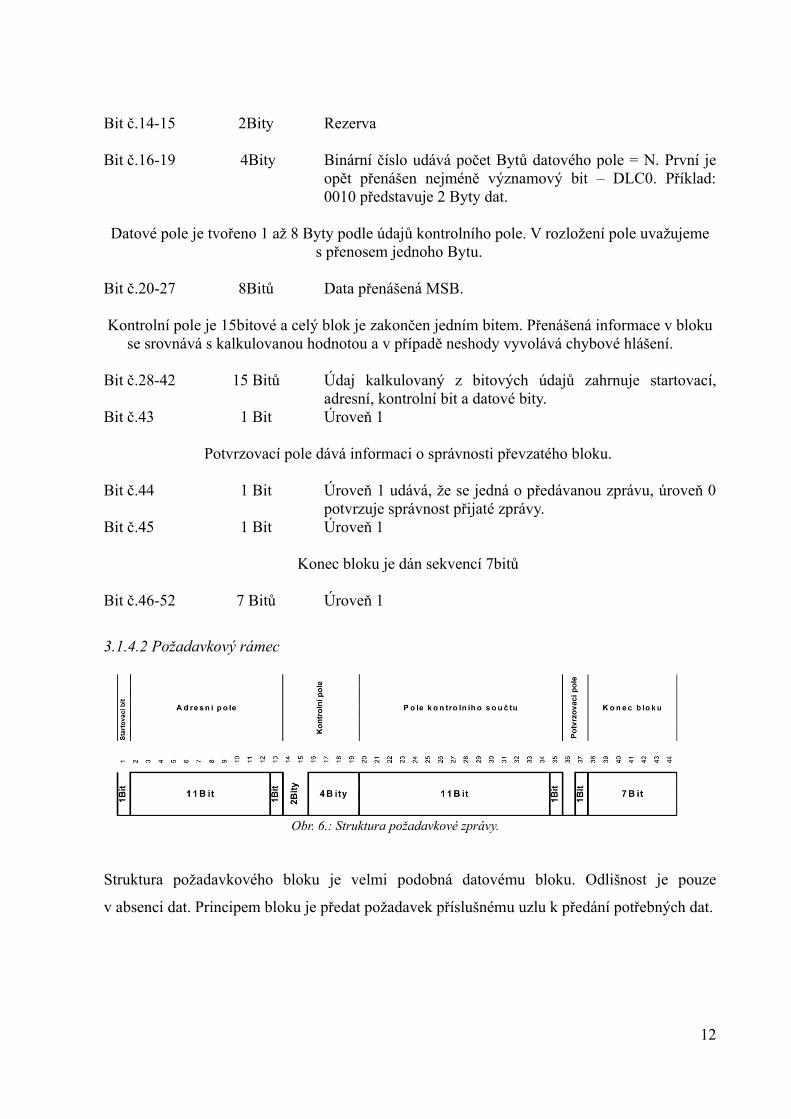
3.1.4.2 Požadavkový rámec
Struktura požadavkového bloku je velmi podobná datovému bloku. Odlišnost je pouze
v absenci dat. Principem bloku je předat požadavek příslušnému uzlu k předání potřebných dat.
12
Obr. 6.: Struktura požadavkové zprávy.
Page 20
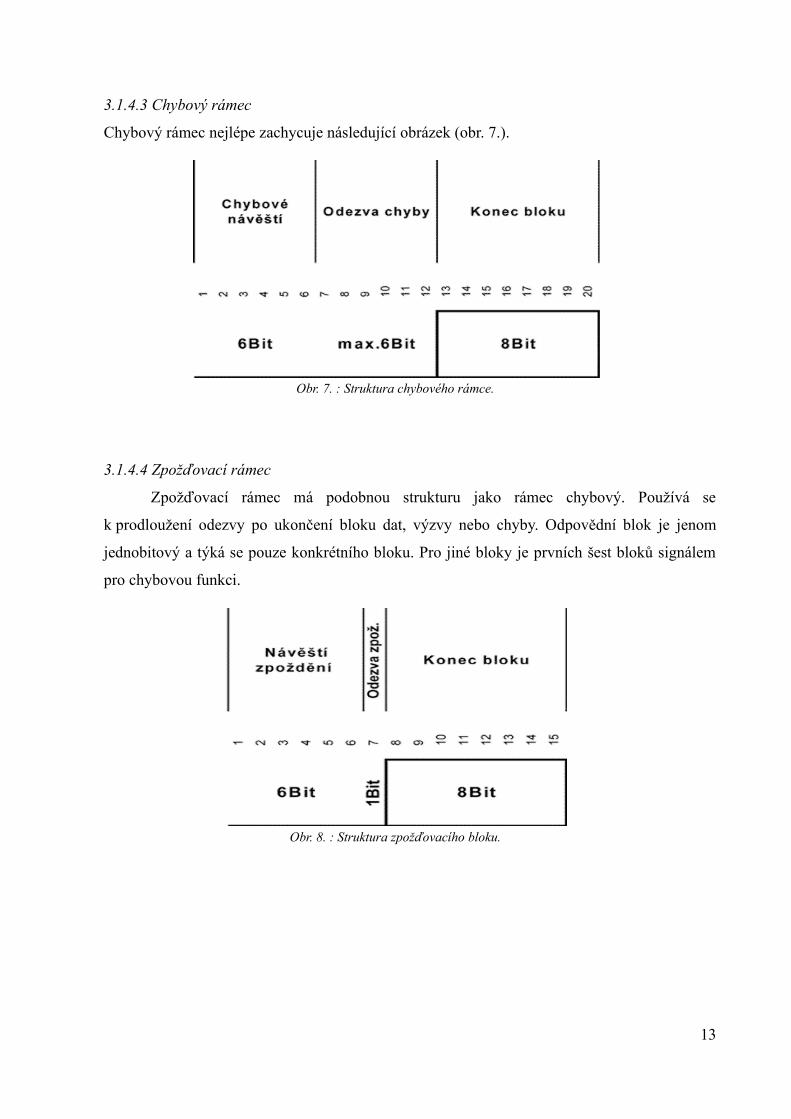
3.1.4.3 Chybový rámec
Chybový rámec nejlépe zachycuje následující obrázek (obr. 7.).
3.1.4.4 Zpožďovací rámec
Zpožďovací rámec má podobnou strukturu jako rámec chybový. Používá se
k prodloužení odezvy po ukončení bloku dat, výzvy nebo chyby. Odpovědní blok je jenom
jednobitový a týká se pouze konkrétního bloku. Pro jiné bloky je prvních šest bloků signálem
pro chybovou funkci.
13
Obr. 7. : Struktura chybového rámce.
Obr. 8. : Struktura zpožďovacího bloku.
Page 21
3.2 CAN rozhraní
Tato kapitola se zabývá návrhem CAN rozhraní, popisem použitých prvků a jejich
vzájemným propojením.
3.2.1 Budič sběrnice CAN - PCA82C251
Budič sběrnice CAN zajišťuje převod napěťových hladin používaných na CAN sběrnici
na napěťové úrovně v rozsahu 0 – 5 V pro zpracování CAN kontrolérem.
Po konzultaci se zástupci firmy Škoda Auto a panem Ing. Janem Krákorou, byly
zjištěny typy prověřených budičů ( = schváleny výrobce vozidla):
• TC1054-OPTO (CAN 1054 Opto-isolated low-speed trigger coupler)
• TC251-OPTO (CAN 251 Opto-isolated High-speed Trigger Coupler)
Pro naše účely byl vybrán budič TC251 (PCA82C251).
3.2.2 CAN Controller - CC750
Jedná se o CAN kontrolér, který je vybaven velmi rychlým sériovým komunikačním
rozhraním SPI (Serial Peripheral Interface). Schopný realizovat komunikaci protokolem
CAN2.0A i CAN2.0B (viz. kapitola 3.1). Dále následuje popis obvodu a jeho základní
charakteristika.
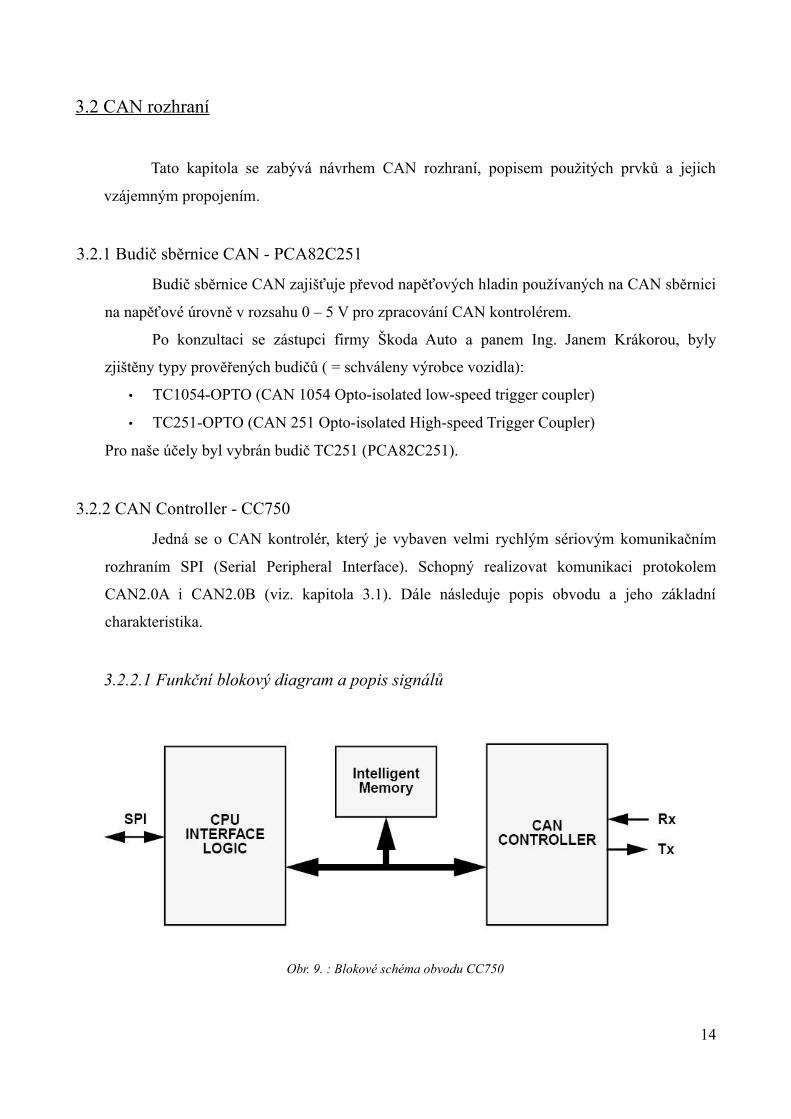
3.2.2.1 Funkční blokový diagram a popis signálů
14
Obr. 9. : Blokové schéma obvodu CC750
Page 22
Popis bloků na obr. 9. :
• Intelligent Memory – je adresována od 00h do FFh. Paměť adresována CAN
CONTROLLERem přes CAM. Během jednoho hodinového taktu dochází k filtraci
zpráv. CPU INTERFACE LOGIC přistupuje k paměti přes registr adres (RAM).
Výhodou tohoto přístupu je rychlost.
• CAN CONTROLLER – slouží k převodu sériových dat CAN sběrnice na paralelní data
ukládaná do Intelligent Memory (buffer).
• CPU INTERFACE LOGIC – zajišťuje komunikaci mezi SPI a Intelligent Memory
Popis základních signálů :
• nINT – signál pro žádost o přerušení
• nRESET – signál pro resetování obvodu
• XTAL1 a XTAL2 – piny pro připojení krystalu oscilátoru
• SPI rozhraní – MISO, MOSI, SPICLK, nCS – tyto signály slouží ke komunikaci přes
SPI rozhraní
• Tx a Rx – pro připojení signálů z budiče sběrnice
3.2.2.2 Charakteristika obvodu• podpora protokolů CAN2.0A a CAN2.0B
• programovatelné globální masky
• 15 objektů pro zprávy
14 Tx/Rx buffrů
1 Rx buffer se stínovým buffrem a programovatelnou maskou
• sériové rozhraní
• flexibilní přerušovací struktura
• pracovní teploty -40ºC až 150ºC
15
Page 23
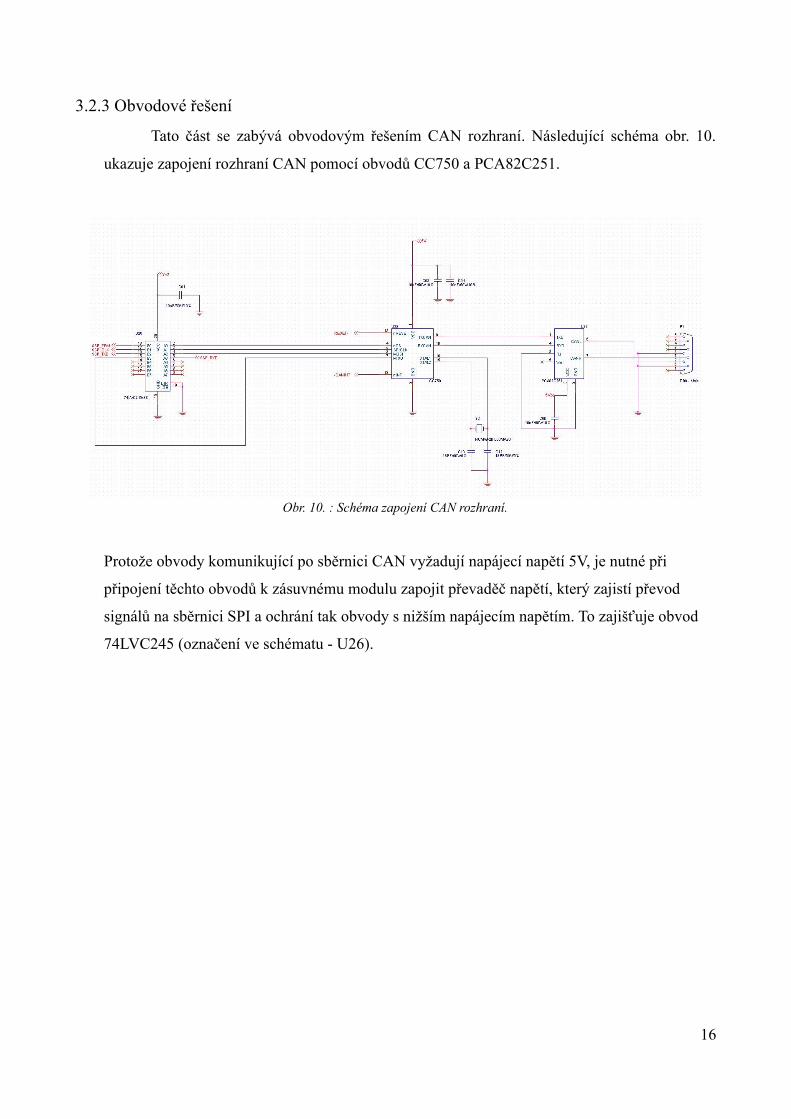
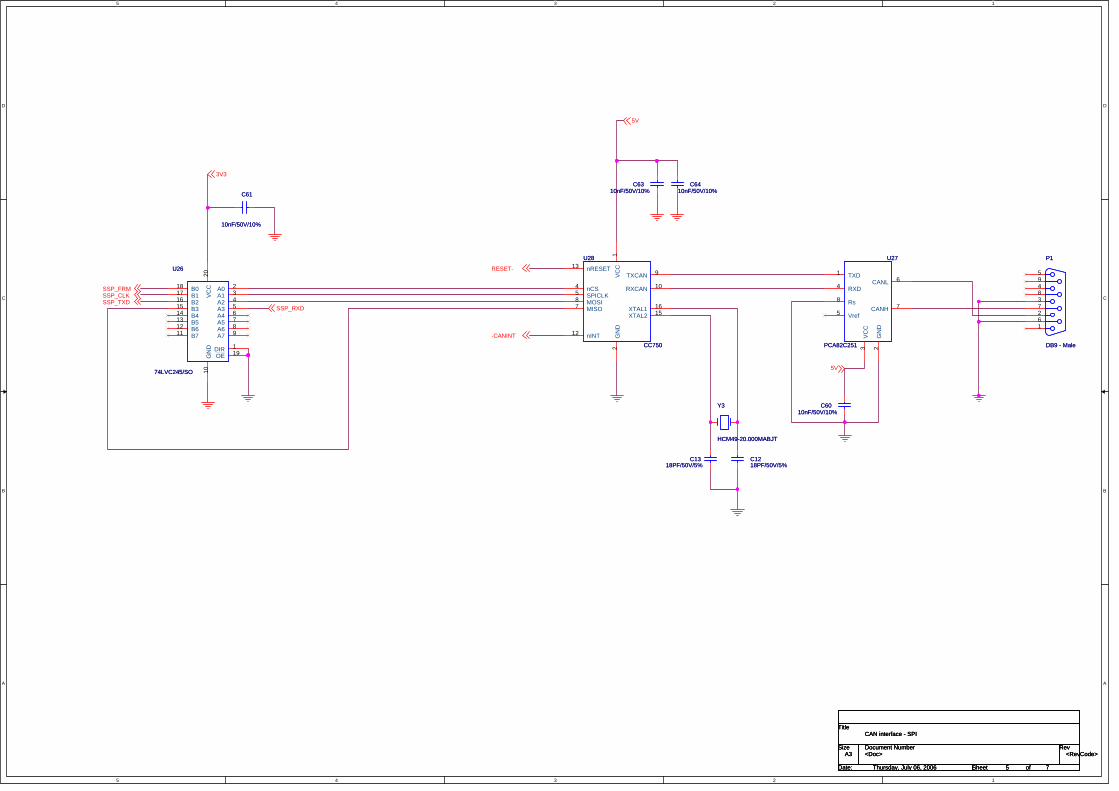
3.2.3 Obvodové řešení
Tato část se zabývá obvodovým řešením CAN rozhraní. Následující schéma obr. 10.
ukazuje zapojení rozhraní CAN pomocí obvodů CC750 a PCA82C251.
Protože obvody komunikující po sběrnici CAN vyžadují napájecí napětí 5V, je nutné při
připojení těchto obvodů k zásuvnému modulu zapojit převaděč napětí, který zajistí převod
signálů na sběrnici SPI a ochrání tak obvody s nižším napájecím napětím. To zajišťuje obvod
74LVC245 (označení ve schématu - U26).
16
Obr. 10. : Schéma zapojení CAN rozhraní.
Page 24
4. USB Host
Kapitola popisuje obvod použitý pro realizaci portu USB Host pro připojení kamery.
V další části této kapitoly se zabýváme obvodovým řešením rozhraní USB Host.
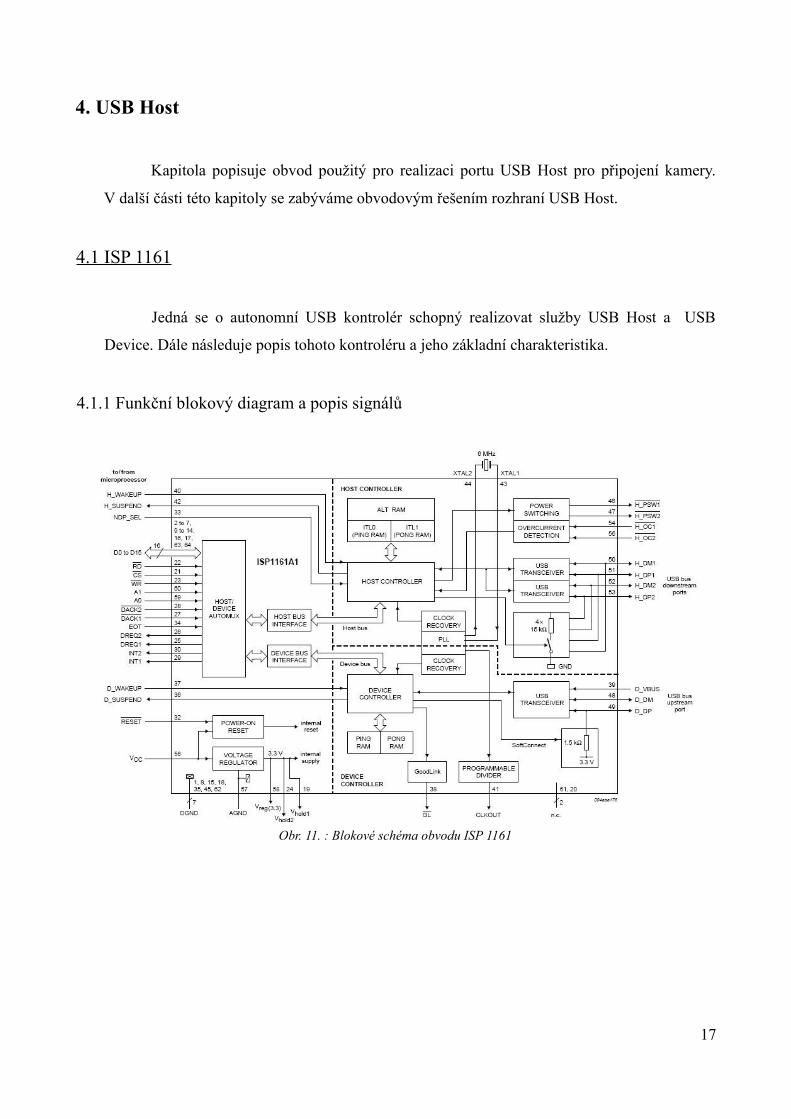
4.1 ISP 1161
Jedná se o autonomní USB kontrolér schopný realizovat služby USB Host a USB
Device. Dále následuje popis tohoto kontroléru a jeho základní charakteristika.
4.1.1 Funkční blokový diagram a popis signálů
17
Obr. 11. : Blokové schéma obvodu ISP 1161
Page 25
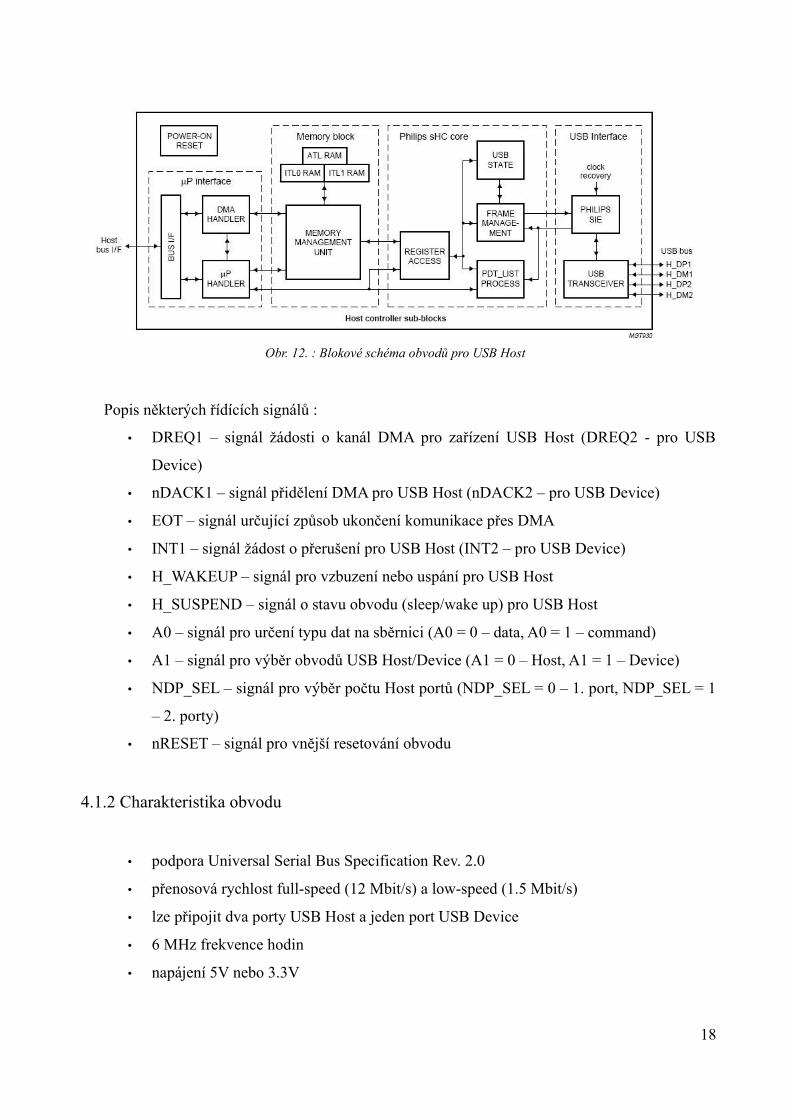
Popis některých řídících signálů :
• DREQ1 – signál žádosti o kanál DMA pro zařízení USB Host (DREQ2 - pro USB
Device)
• nDACK1 – signál přidělení DMA pro USB Host (nDACK2 – pro USB Device)
• EOT – signál určující způsob ukončení komunikace přes DMA
• INT1 – signál žádost o přerušení pro USB Host (INT2 – pro USB Device)
• H_WAKEUP – signál pro vzbuzení nebo uspání pro USB Host
• H_SUSPEND – signál o stavu obvodu (sleep/wake up) pro USB Host
• A0 – signál pro určení typu dat na sběrnici (A0 = 0 – data, A0 = 1 – command)
• A1 – signál pro výběr obvodů USB Host/Device (A1 = 0 – Host, A1 = 1 – Device)
• NDP_SEL – signál pro výběr počtu Host portů (NDP_SEL = 0 – 1. port, NDP_SEL = 1
– 2. porty)
• nRESET – signál pro vnější resetování obvodu
4.1.2 Charakteristika obvodu
• podpora Universal Serial Bus Specification Rev. 2.0
• přenosová rychlost full-speed (12 Mbit/s) a low-speed (1.5 Mbit/s)
• lze připojit dva porty USB Host a jeden port USB Device
• 6 MHz frekvence hodin
• napájení 5V nebo 3.3V
18
Obr. 12. : Blokové schéma obvodů pro USB Host
Page 26
• lze použít v digitálních fotoaparátech
• pracovní teploty -40ºC až 85ºC
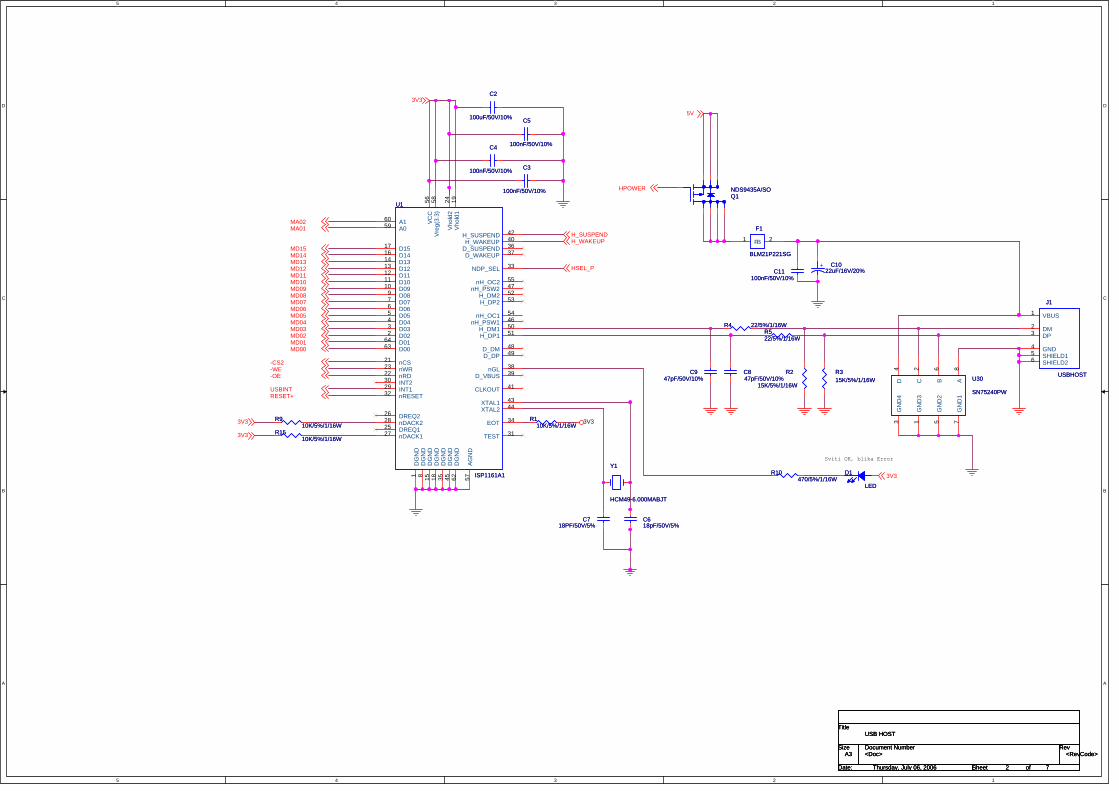
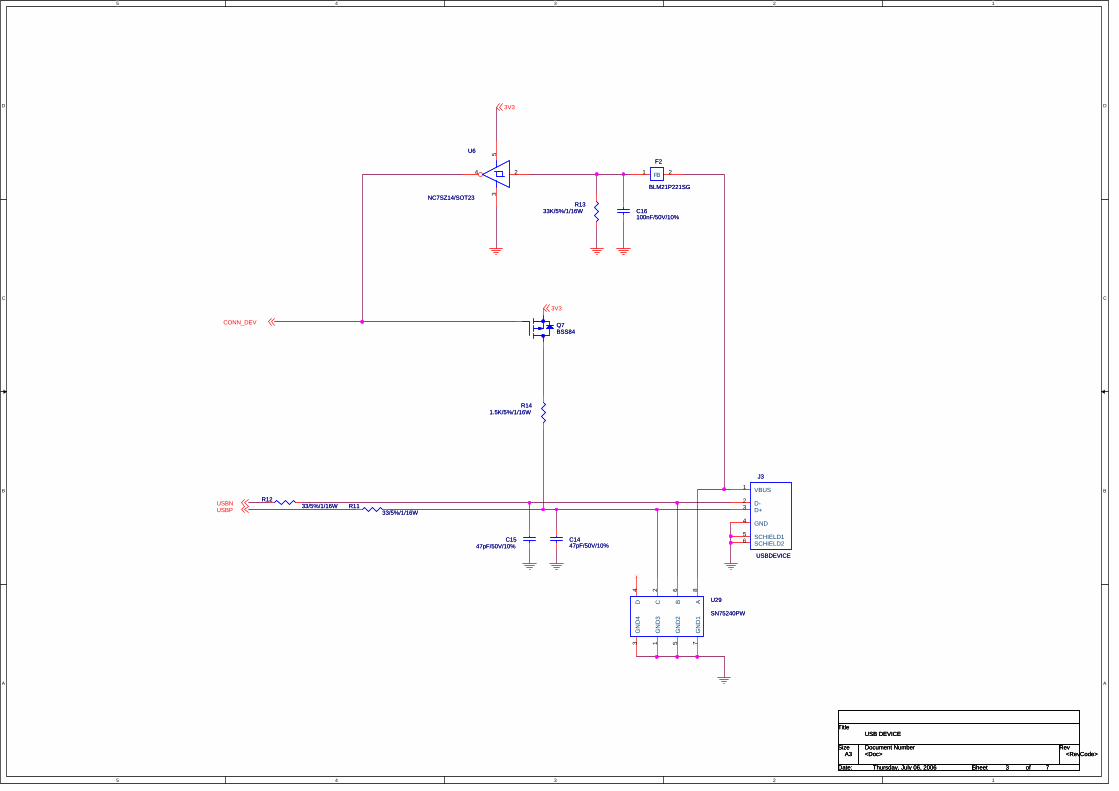
4.2 Obvodové řešení
Tato část práce se zabývá obvodovým řešením pouze USB Host rozhraní. Rozhraní
USB Device není realizováno pomocí obvodu ISP 1161, protože je již integrováno do
procesoru PXA 255 a je vyvedeno na sběrnici přípojného modulu. Schéma zapojení viz.
příloha.
19
Page 27
5. Kamera
Obsahem této kapitoly je návrh kamerového systému zařízení. Je zde poskytnut přehled
stěžejních částí, potřebných pro zaznamenání videa. Také je popsána kompatibilita všech částí
černé skřínky z hlediska rychlosti přenosu dat. Požadavky na kamerový systém jsou popsány v
kapitole 2.3. Dále je představeno vybrané řešení.
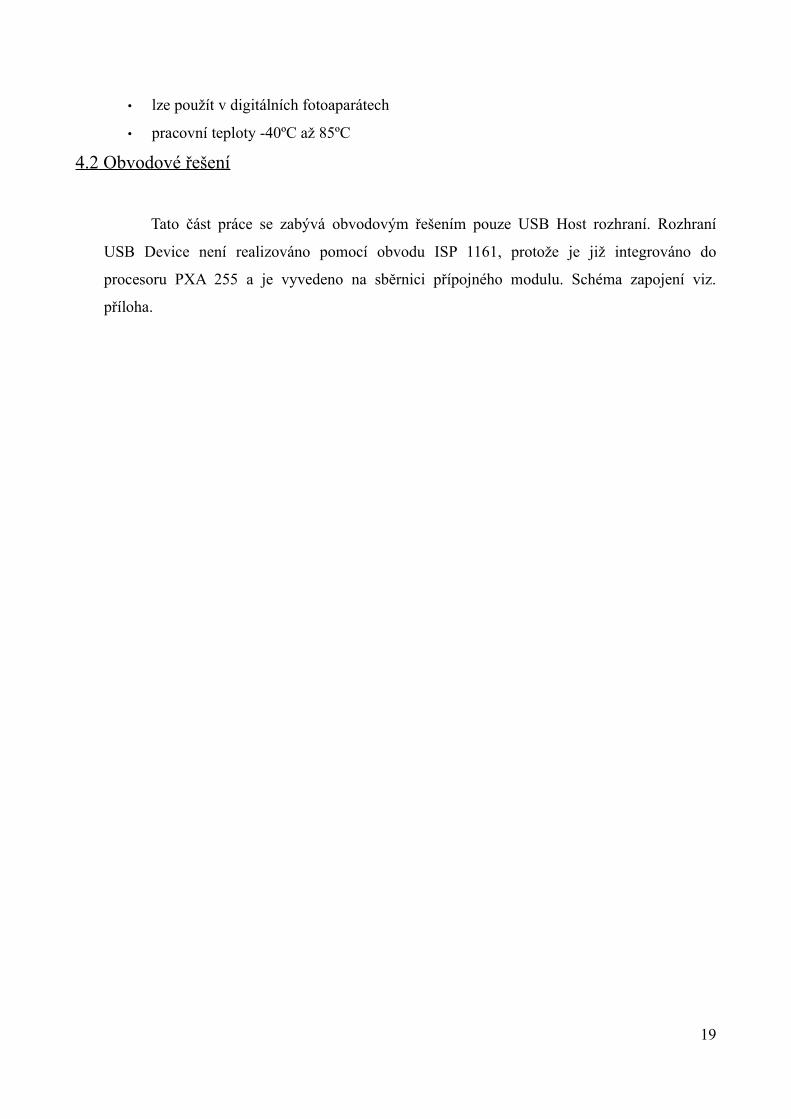
5.1 Optický senzor – VS6650
Jedná se o 1.0 Megapixelový SMIA (Standard Mobile Imaging Architecture) kamerový
modul. Určený pro mobilní telefony, PDA , bezdrátové bezpečnostní kamery atd.
Specifikace :
Aktivní rozlišení 1152H x 864V
Velikost pixelu 4.0μm x 4.0μm
Frekvence snímání 5 – 30 Hz (1152x864)
Grafické rozhraní CCP 2.0 high-speed serial
390 Mbit/s D/S encoding
1.8 V LVDS
Poměr signál-šum 35dB při 100lux
Spotřeba při 15 fps : 85mW (max)
Provozní teplota -30 až +70°C
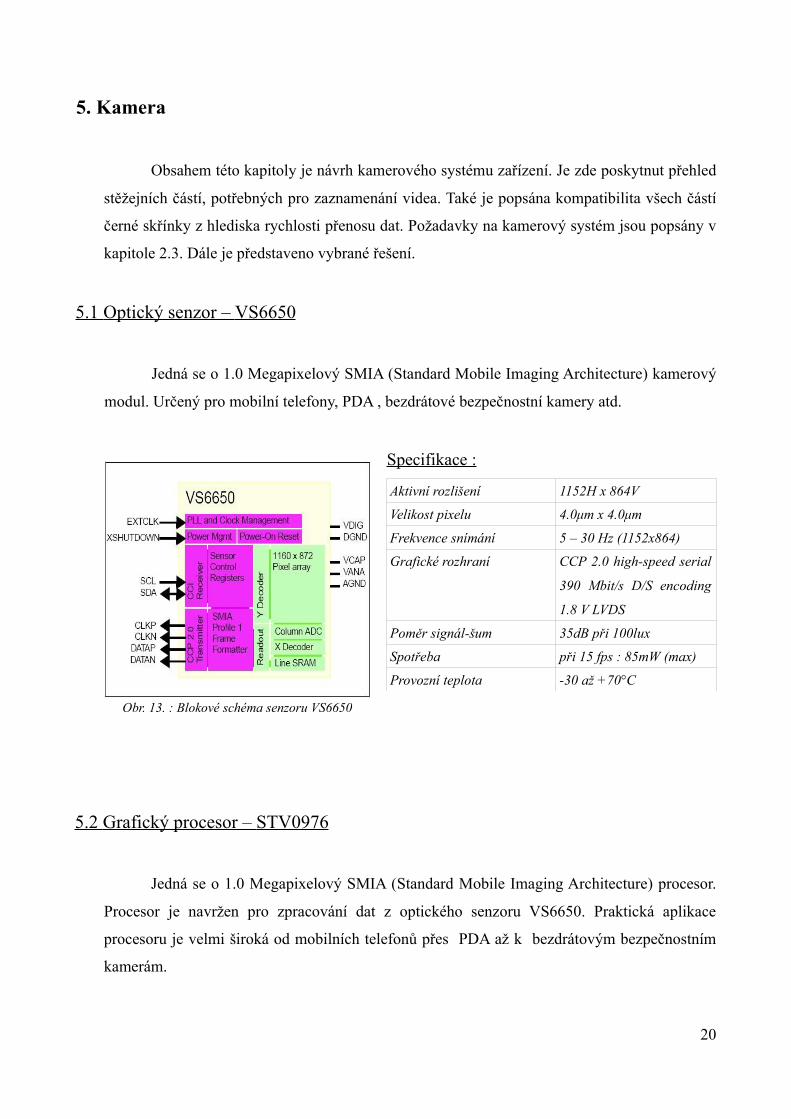
5.2 Grafický procesor – STV0976
Jedná se o 1.0 Megapixelový SMIA (Standard Mobile Imaging Architecture) procesor.
Procesor je navržen pro zpracování dat z optického senzoru VS6650. Praktická aplikace
procesoru je velmi široká od mobilních telefonů přes PDA až k bezdrátovým bezpečnostním
kamerám.
20
Obr. 13. : Blokové schéma senzoru VS6650
Page 28
Specifikace :
Frekvence snímání 1 - 15 Hz (1152 x 864)
1 - 30 Hz (800 x 600)
Výstupní formát fotografií YUV 4:2:2, RGB 565,
RGB 444, JPEG
Spotřeba při 15 fps : 85mW (max)
Grafický výstup 1 SMIA class 0 high-speed
serial 208Mbit/s data/clock
1.8 V LVDS
Grafický výstup 2 8-bit parallel video
HSYNC/VSYNC/PCLK
24 MHz max
Provozní teplota -25 až +70°C
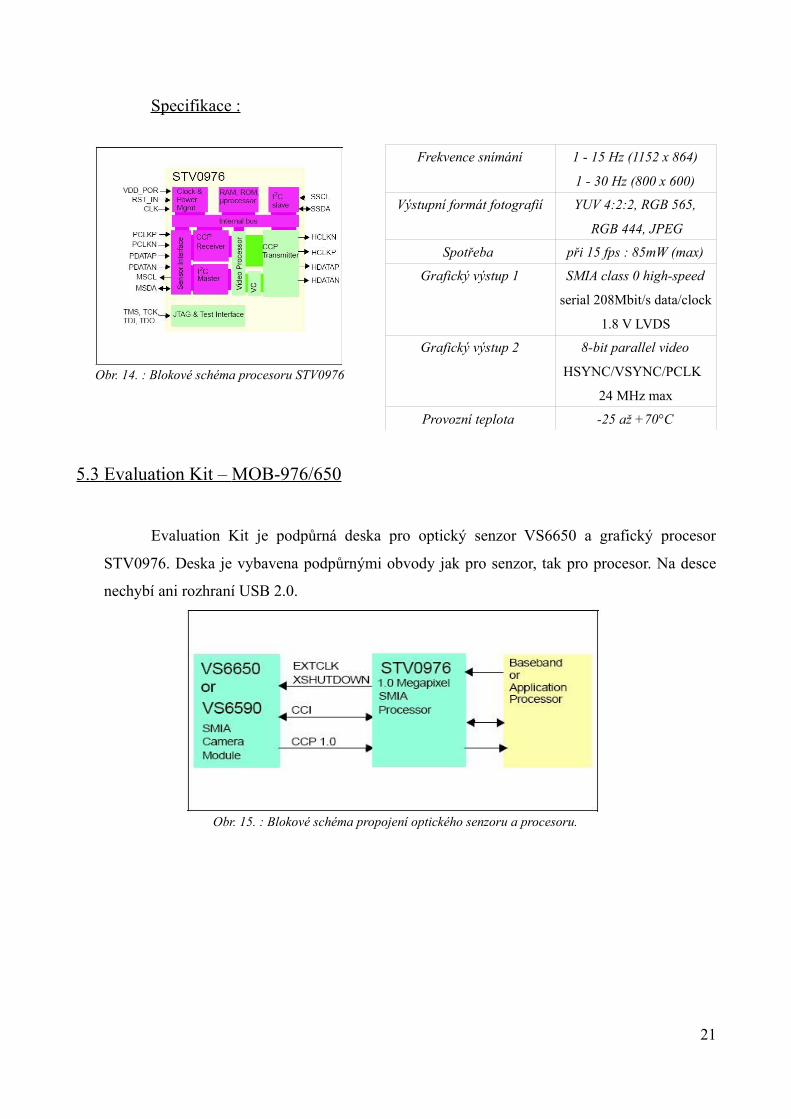
5.3 Evaluation Kit – MOB-976/650
Evaluation Kit je podpůrná deska pro optický senzor VS6650 a grafický procesor
STV0976. Deska je vybavena podpůrnými obvody jak pro senzor, tak pro procesor. Na desce
nechybí ani rozhraní USB 2.0.
21
Obr. 14. : Blokové schéma procesoru STV0976
Obr. 15. : Blokové schéma propojení optického senzoru a procesoru.
Page 29
Charakteristika desky
• Podporuje STV0976 procesor a VS6650 1.0 Megapixelovou (1152H x 864V) kamerou
jednotku.
• Až do 30 snímků za sekundu (fps) v rozlišení SVGA nebo 15fps v 1.0 Megapixelovém
rozlišení.
• Spojení přes USB 2.0 zajišťuje snadnou kontrolu a snadný přenos dat.
• JPEG komprese s programovatelnou velikostí výstupního souboru.
• Integrovaný kamerový kontrolér zajišťuje automatické vyvážení bílé a anti - flicker.
5.4 Kompatibilita datové propustnosti
V této kapitola je řešena problematika kompatibility rychlostí a datové propustnosti
sběrnic a periferií, přes které bude realizován přenos video dat.
Výpočet datového toku (formát snímku JPEG - komprese ) :
1. snímek : 250kB
12 snímků za sekundu : 12*250kB = 3MB
přepočet na bit/s : 3MB*8 = 24Mbit/s
Datový tok : 24Mbit/s
22
Obr. 16. : Evaluation Kit
Page 30
Z parametrů kamerového systému jsme zjistili, že datový tok kamerový systém
zrealizuje bez větších problémů.
USB rozhraní :
Ideální datový tok USB 2.0 : 480Mbit/s
Odhad reálného datového toku : 120Mbit/s (pokles na 1/4 z max.)
24 Mbit/s < 120Mbit/s – USB nebude limitujícím prvkem
Měření zrychlení (viz. kapitola 6.3) :
Vzorkovací frekvence : 2kHz
1. vzorek : 16bitů
Velikost vzorků za 1 sekundu : 2000 * 16bit = 32kbit
Toto množství je zanedbatelné.
Měření rychlosti :
Frekvence zjišťování rychlosti : 10Hz – 50Hz
Velikost vzorků za 1 sekundu : max. 50 * 32bit = 1,6kbit
Toto množství je zanedbatelné.
Vnitřní sběrnice černé skřínky :
Pracovní frekvence sběrnice : 100MHz
Velikost datového slova : 32 bit
Doba potřebná na zápis nebo čtení dat. slova(maximální doba) : 250 ns
Počet slov za 1 sekundu : 1/250ns = 4 000 000 slov
Datový tok na sběrnici : 32bit * 4 000 000 = 128Mbit/s
Příjem dat (USB->OP) : 24Mbit/s
Odesílání dat (OP->Compact Flash) : 24Mbit/s
Přenos dat po sběrnici : 2*24Mbit/s = 48Mbit/s
48 Mbit/s < 128Mbit/s – sběrnice nebude limitovat přenosovou rychlost
23
Page 31
Compact Flash :
Ideální rychlost zápisu : 16MB/s = 128Mbit/s
(rychlost pro kartu - Kingston 1 GB Compact Flash Ultimate 100x)
Odhad reálné rychlosti zápisu : 30Mbit/s (pokles na 1/4 z max.)
24Mbit/s < 30Mbit/s – tato periferie je nejslabším (nejpomalejší) článkem přenosu
Compact Flash bude určovat rychlost přenosu, a tím i velikost snímků.
24
Page 32
6. Akcelerometry a A/D převodníky
Problematikou této kapitoly jsou způsoby a možnosti měření zrychlení pomocí
akcelerometrů, převody zrychlení vyjádřeného analogovým signálem na číselnou podobu pro
jeho další zpracování.
6.1 Akcelerometry
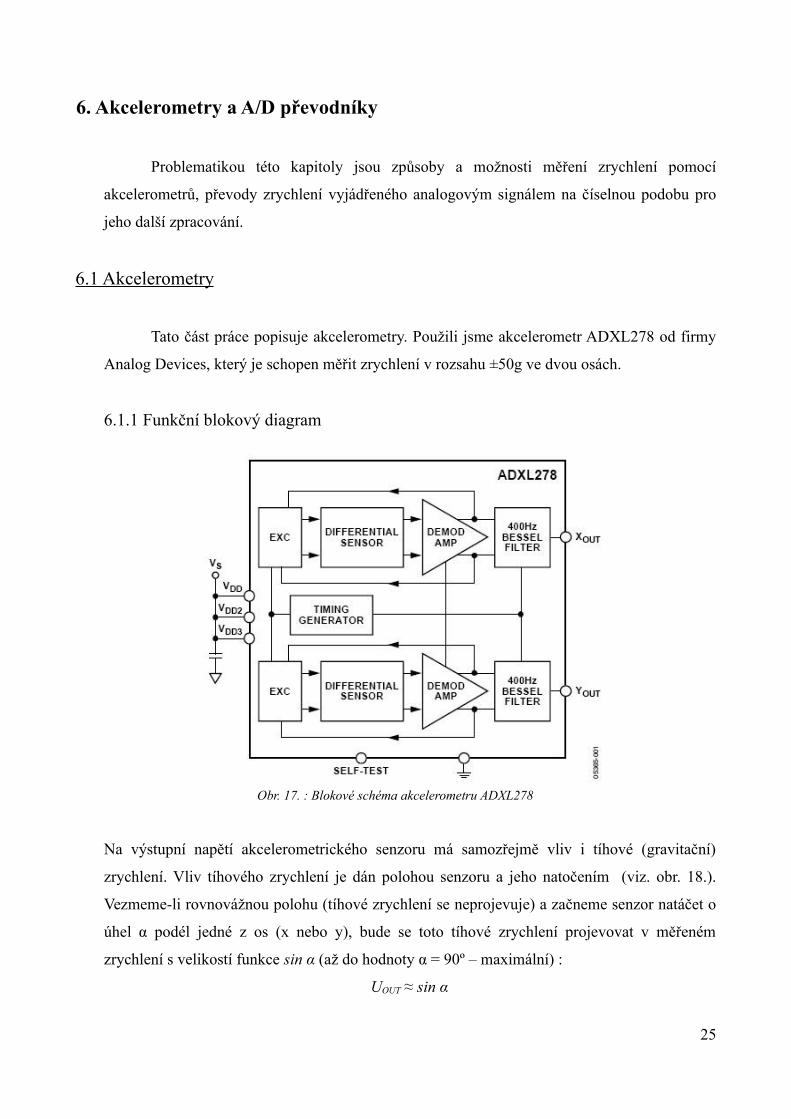
Tato část práce popisuje akcelerometry. Použili jsme akcelerometr ADXL278 od firmy
Analog Devices, který je schopen měřit zrychlení v rozsahu ±50g ve dvou osách.
6.1.1 Funkční blokový diagram
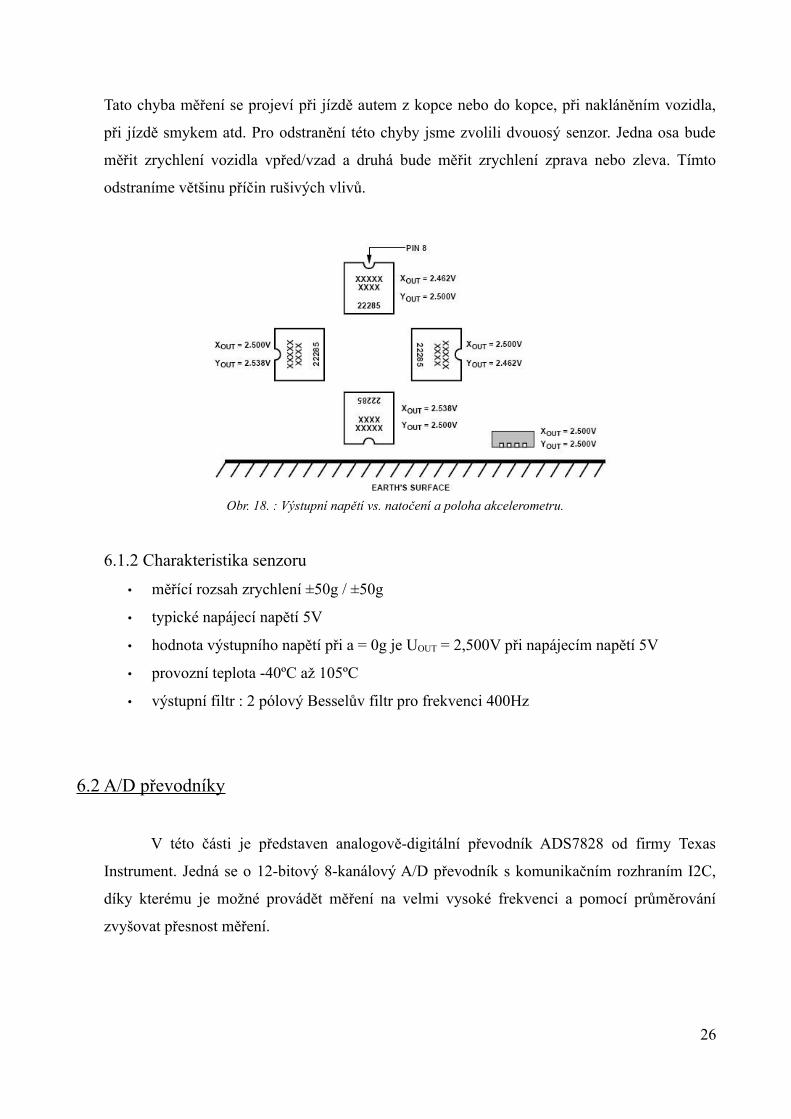
Na výstupní napětí akcelerometrického senzoru má samozřejmě vliv i tíhové (gravitační)
zrychlení. Vliv tíhového zrychlení je dán polohou senzoru a jeho natočením (viz. obr. 18.).
Vezmeme-li rovnovážnou polohu (tíhové zrychlení se neprojevuje) a začneme senzor natáčet o
úhel α podél jedné z os (x nebo y), bude se toto tíhové zrychlení projevovat v měřeném
zrychlení s velikostí funkce sin α (až do hodnoty α = 90º – maximální) :
UOUT ≈ sin α
25
Obr. 17. : Blokové schéma akcelerometru ADXL278
Page 33
Tato chyba měření se projeví při jízdě autem z kopce nebo do kopce, při nakláněním vozidla,
při jízdě smykem atd. Pro odstranění této chyby jsme zvolili dvouosý senzor. Jedna osa bude
měřit zrychlení vozidla vpřed/vzad a druhá bude měřit zrychlení zprava nebo zleva. Tímto
odstraníme většinu příčin rušivých vlivů.
6.1.2 Charakteristika senzoru
• měřící rozsah zrychlení ±50g / ±50g
• typické napájecí napětí 5V
• hodnota výstupního napětí při a = 0g je UOUT = 2,500V při napájecím napětí 5V
• provozní teplota -40ºC až 105ºC
• výstupní filtr : 2 pólový Besselův filtr pro frekvenci 400Hz
6.2 A/D převodníky
V této části je představen analogově-digitální převodník ADS7828 od firmy Texas
Instrument. Jedná se o 12-bitový 8-kanálový A/D převodník s komunikačním rozhraním I2C,
díky kterému je možné provádět měření na velmi vysoké frekvenci a pomocí průměrování
zvyšovat přesnost měření.
26
Obr. 18. : Výstupní napětí vs. natočení a poloha akcelerometru.
Page 34
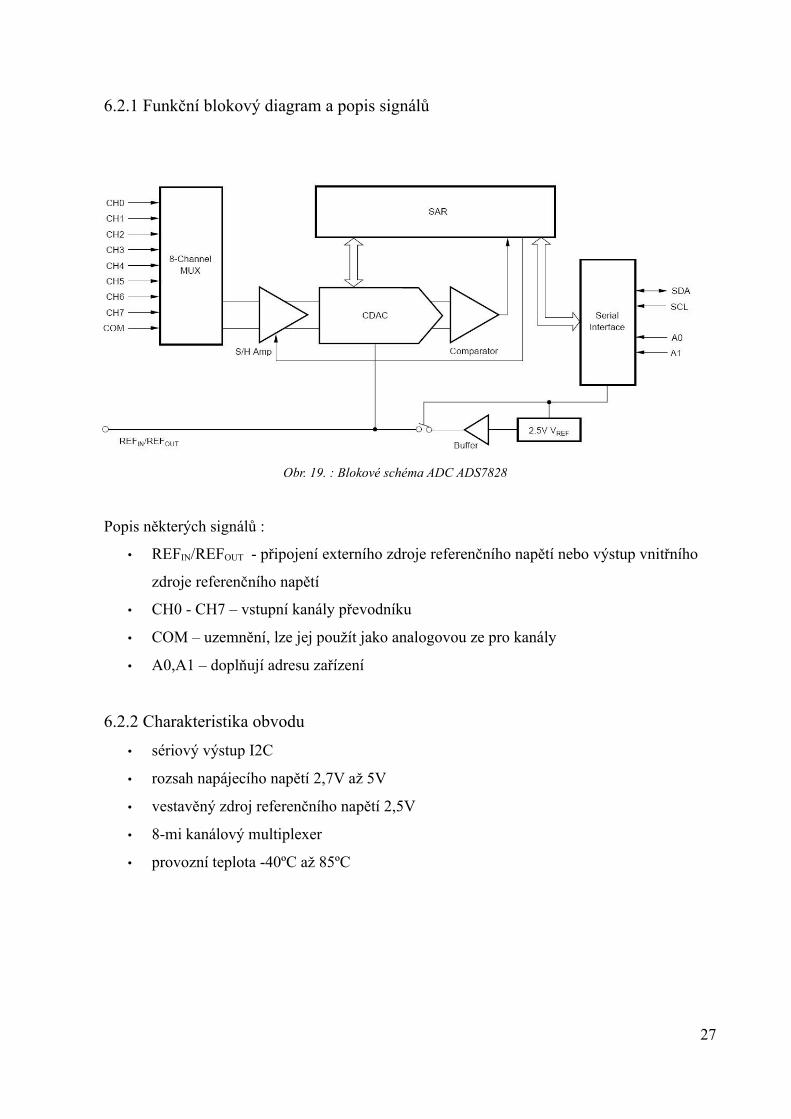
6.2.1 Funkční blokový diagram a popis signálů
Popis některých signálů :
• REFIN/REFOUT - připojení externího zdroje referenčního napětí nebo výstup vnitřního
zdroje referenčního napětí
• CH0 - CH7 – vstupní kanály převodníku
• COM – uzemnění, lze jej použít jako analogovou ze pro kanály
• A0,A1 – doplňují adresu zařízení
6.2.2 Charakteristika obvodu
• sériový výstup I2C
• rozsah napájecího napětí 2,7V až 5V
• vestavěný zdroj referenčního napětí 2,5V
• 8-mi kanálový multiplexer
• provozní teplota -40ºC až 85ºC
27
Obr. 19. : Blokové schéma ADC ADS7828
Page 35
6.3 Stanovení parametrů akcelerometrů a ADC
Po konzultaci se zástupci firmy Škoda Auto, byla stanovena vzorkovací frekvence
signálu z akcelerometru na 2 kHz a rozsah zrychlení, které je akcelerometr schopen změřit byl
stanoven na ±50g. Vzorkovací frekvence 2 kHz může být použita, protože akcelerometr má na
výstupu filtr 400Hz. Tedy je splněna vzorkovací věta.
Vzhledem ke zveřejnění této zprávy na internetu nebylo možné zde zveřejnit průběhy
zrychlení při nárazu vozidla. Firma Škoda Auto si to nepřála.
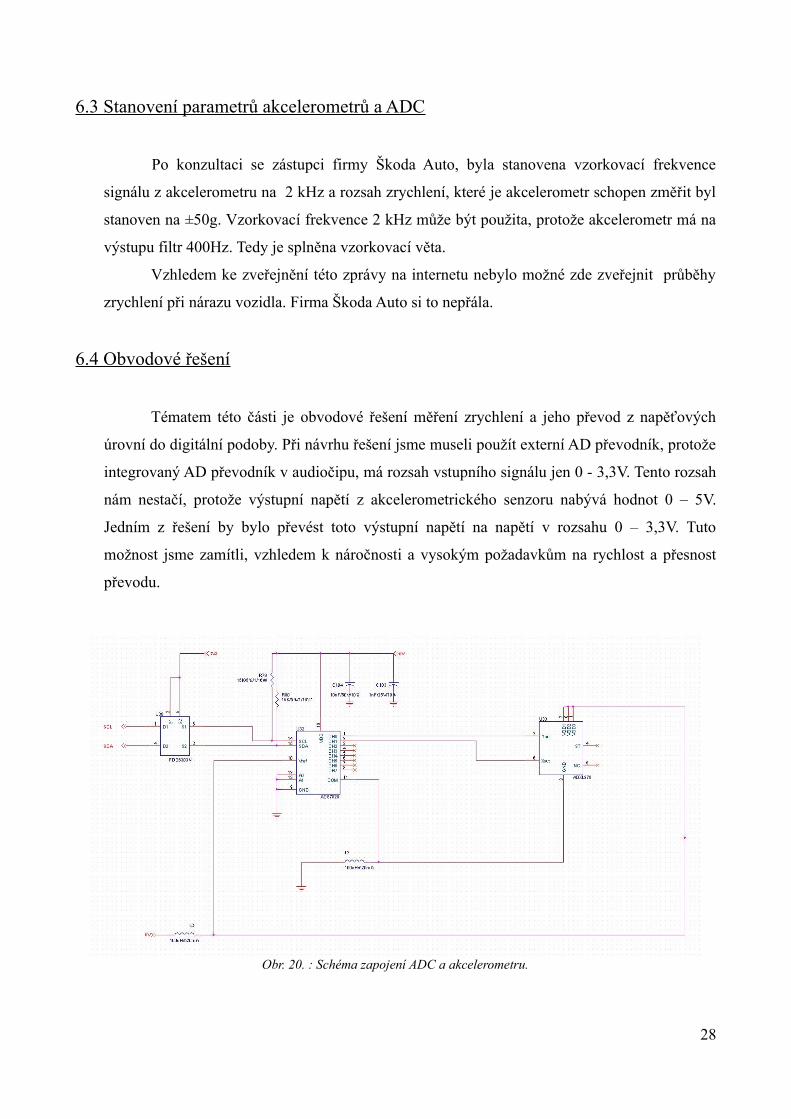
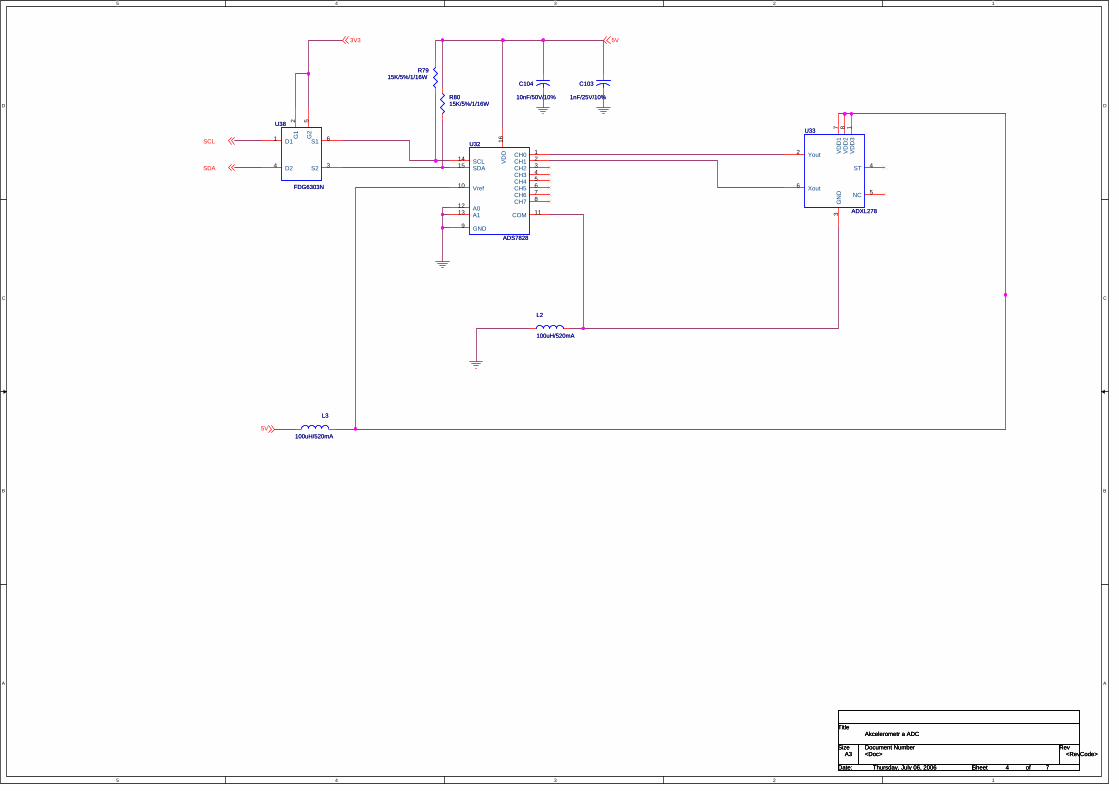
6.4 Obvodové řešení
Tématem této části je obvodové řešení měření zrychlení a jeho převod z napěťových
úrovní do digitální podoby. Při návrhu řešení jsme museli použít externí AD převodník, protože
integrovaný AD převodník v audiočipu, má rozsah vstupního signálu jen 0 - 3,3V. Tento rozsah
nám nestačí, protože výstupní napětí z akcelerometrického senzoru nabývá hodnot 0 – 5V.
Jedním z řešení by bylo převést toto výstupní napětí na napětí v rozsahu 0 – 3,3V. Tuto
možnost jsme zamítli, vzhledem k náročnosti a vysokým požadavkům na rychlost a přesnost
převodu.
28
Obr. 20. : Schéma zapojení ADC a akcelerometru.
Page 36
Akcelerometr a ADC využívají jak digitální obvody, tak i analogové, proto bylo nutné
vytvořit analogové napětí (bez šumu vyvolaného digitálními obvody). Proto byly do obvodu
přidány cívky, které odfiltrují vysokofrekvenční šum. Také bylo nutné oddělit části sběrnice
I2C, na kterou jsou připojeny odvody s napájecím napětím 5V od části s obvody napájenými
napětím nižším. To zajistí obvod FDG6303N (označení ve schématu U38).
29
Page 37
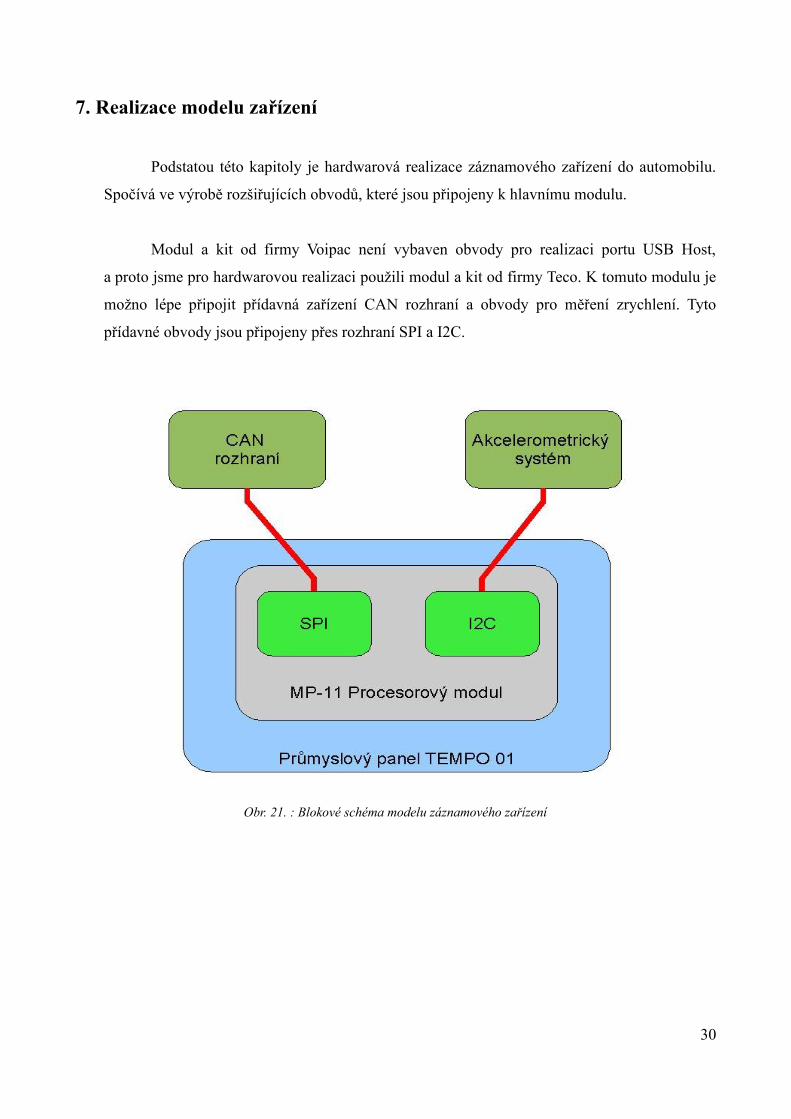
7. Realizace modelu zařízení
Podstatou této kapitoly je hardwarová realizace záznamového zařízení do automobilu.
Spočívá ve výrobě rozšiřujících obvodů, které jsou připojeny k hlavnímu modulu.
Modul a kit od firmy Voipac není vybaven obvody pro realizaci portu USB Host,
a proto jsme pro hardwarovou realizaci použili modul a kit od firmy Teco. K tomuto modulu je
možno lépe připojit přídavná zařízení CAN rozhraní a obvody pro měření zrychlení. Tyto
přídavné obvody jsou připojeny přes rozhraní SPI a I2C.
30
Obr. 21. : Blokové schéma modelu záznamového zařízení
Page 38
8. Závěr
Výsledkem této bakalářské práce je hardwarový návrh záznamového zařízení do
automobilu. Tento návrh je popsán v předchozích kapitolách a vyhovuje všem požadavkům,
které jsou součástí zadání a zároveň umožňuje rozšiřování, vylepšování a zefektivnění návrhu
v případných dalších pracích.
Hlavní výhodou naší koncepce zařízení je záložní zdroj energie. V případě přerušení
přívodu elektrické energie do záznamového zařízení, dojde z přepnutí na záložní zdroj
elektrické energie. Proto bude mít zařízení dostatek času uložit všechna nasbíraná data
a legálně ukončit svoji činnost. Po opětovném zapojení přívodu elektrické energie, se zařízení
uvede znovu do provozu a dochází také k dobíjení záložního zdroje energie. Další výhodou
návrhu je použití schválených součástek výrobcem automobilu (Škoda Auto). Přesněji budiče
sběrnice CAN, což nám umožňuje nejen odposlouchávat komunikaci na sběrnici, ale i vysílat
na ni, aniž by došlo k rušení komunikace. Poslední výhodou koncepce je rozhraní USB Device,
s jehož pomocí je možné záznamové zařízení snadno připojit k počítači.
Omezením naší koncepce záznamového zařízení je paměťové médium, na které se
ukládají zaznamenaná data. Paměťové medium je paměťová karta CompactFlash, která má
omezený počet přepisů (zápisů) – tento údaj se neustále zvyšuje, ale zpravidla se udává kolem
10 000 zápisů, což při rychlosti zápisu 3MB/s (viz. kapitola 5.4) znamená, že kartu o velikosti
1GB zaplníme za zhruba 5 minut jízdy, tj. inzerovaná životnost záznamové karty bude
vyčerpána přibližně za 166 dní při provozu 5 hodin denně (3MB/s * 60s * 5min ≈ 1GB,
10000 /12 / 5hod = 166 dní). Záznamové zařízení obsahuje jen jednu paměťovou kartu,
tj. životnost zařízení je zhruba 5 měsíců. Toto omezení se nedá odstranit, ale vzhledem k rychle
se zlepšujícím vlastnostem paměťových karet se v budoucnu nemusí projevovat.
Zadání této práce je zpracováno v sedmi kapitolách. Součástí sedmé kapitoly je pouze
popis předpokládané realizace zařízení. Z časových důvodů nebyla provedena vlastní realizace.
Hlavní příčinou nekompletnosti této kapitoly jsou velké problémy při komunikaci s dodavateli
požadovaných součástek, kteří nebyli ochotni dodat součástky v námi požadovaném množství
(dodávky jen ve velkém množství), ani v námi požadovaném termínu.
Tato práce byla pro mě velmi přínosná i po odborné stránce i z hlediska spolupráce
s vedoucím práce panem Ing. Pavlem Růžičkou, rád bych na tomto projektu pracoval v rámci
diplomové práce na magisterském studiu, abych dokončil realizaci tohoto zařízení a ověřil jeho
funkčnost.
31
Page 39
9. Seznam obrázků
1. Rozdělení záznamových zařízení.........................................................................................2
2. Základní struktura sběrnice CAN........................................................................................8
3. Příklad časové návaznosti signálů na sběrnici CAN a signálů Tx a Rx z budiče sběrnice..8
4. Principiální schéma sběrnice CAN. ...................................................................................10
5. Datové zprávy podle jednotlivých specifikací. ..................................................................11
6. Struktura požadavkové zprávy............................................................................................12
7. Struktura chybového rámce................................................................................................13
8. Struktura zpožďovacího bloku............................................................................................13
9. Blokové schéma obvodu CC750.........................................................................................14
10. Schéma zapojení CAN rozhraní..........................................................................................16
11. Blokové schéma obvodu ISP 1161......................................................................................17
12. Blokové schéma obvodů pro USB Host ............................................................................18
13. Blokové schéma senzoru VS6650.......................................................................................20
14. Blokové schéma procesoru STV0976.................................................................................21
15. Blokové schéma propojení optického senzoru a procesoru................................................21
16. Evaluation Kit.....................................................................................................................22
17. Blokové schéma akcelerometru ADXL278........................................................................25
18. Výstupní napětí vs. natočení a poloha akcelerometru.........................................................26
19. Blokové schéma ADC ADS7828........................................................................................27
20. Schéma zapojení ADC a akcelerometru..............................................................................28
21. Blokové schéma modelu záznamového zařízení................................................................30
32
Page 40
10. Literatura
[1] 100+1 Černá skřínka pro automobily, číslo 6/2004
[2] Event Data Recorders : http://www.tttonline.com/product/edr/edr.htm
[3] Crash Data Retreival : http://www.accidentreconstruction.com/newsletter/nov04/crash-data-
retrieval-system.asp
[4] Crash Data Recorders : http://www.harristechnical.com/cdr.htm
[5] Prodejce CDR : http://www.crash-data-retrieval-system.com/
[6] Event Data Recorders Applications : http://www-nrd.nhtsa.dot.gov/edr-site/index.html
[7] Popis CAN : http://fieldbus.feld.cvut.cz/can/
[8] CAN konektor : http://www.interfacebus.com/Design_Connector_CAN.html
[9] Popis CAN : http://www.hw.cz/Rozhrani/ART1173-Aplikovani-sbernice-CAN.html
[10] Popis struktury CAN : http://www.hw.cz/Rozhrani/ART1111-CAN---popis-struktury.html
[11] Popis sběrnice SPI : http://en.wikipedia.org/wiki/Serial_Peripheral_Interface_Bus
[12] Popis sběrnice I2C :
http://www.semiconductors.philips.com/acrobat_download/literature/9398/39340011.pdf
[13] Datasheet ISP1161 – Philips
[14] Datasheet ADS7828 – Texas Instruments
[15] Datasheet CC750 – Bosch
[16] Datasheet ADXL278 – Analog Devices
[17] Datasheet VS6650, STV0976, MOB-976/650 – ST Microelectronics
[18] Dokumentace k Development Kitu do firmy Voipac
33
Page 41
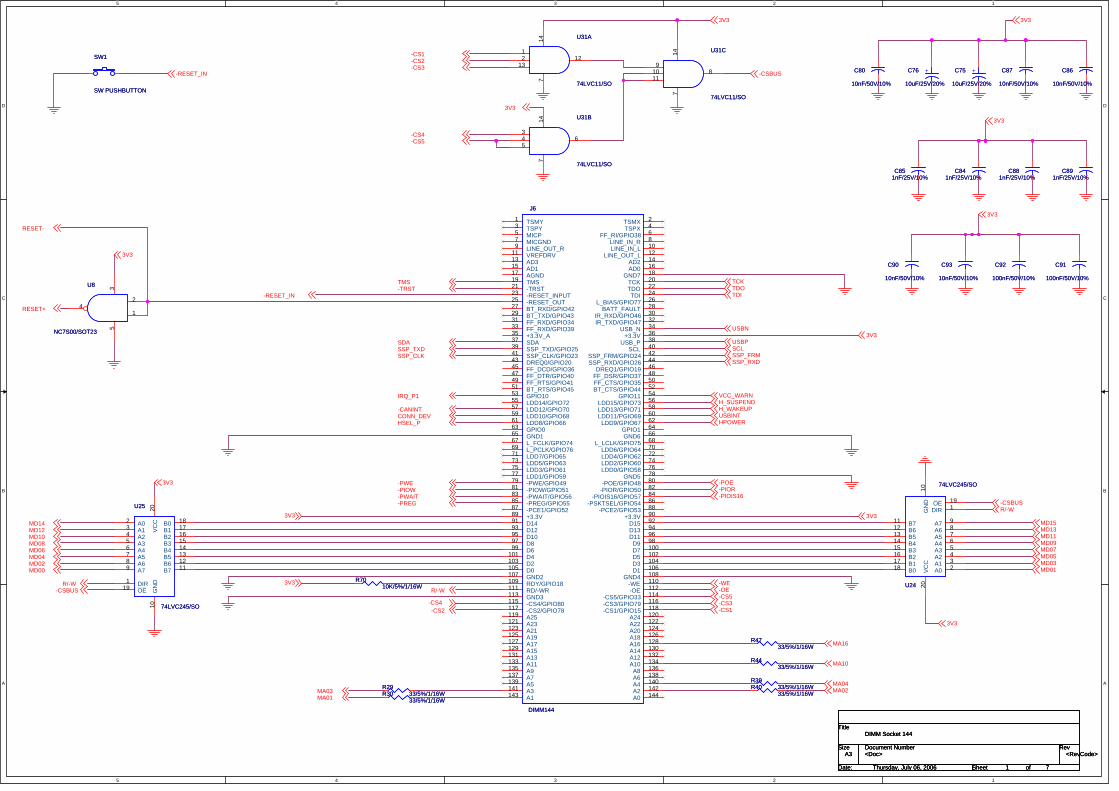
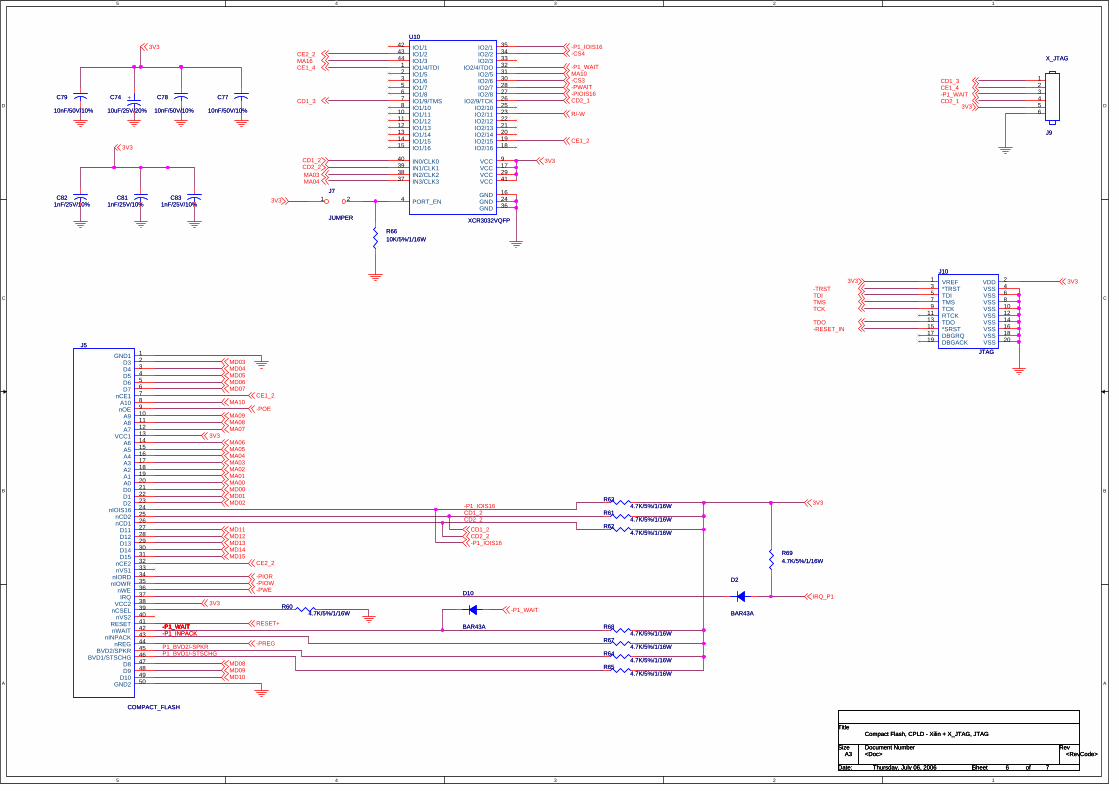
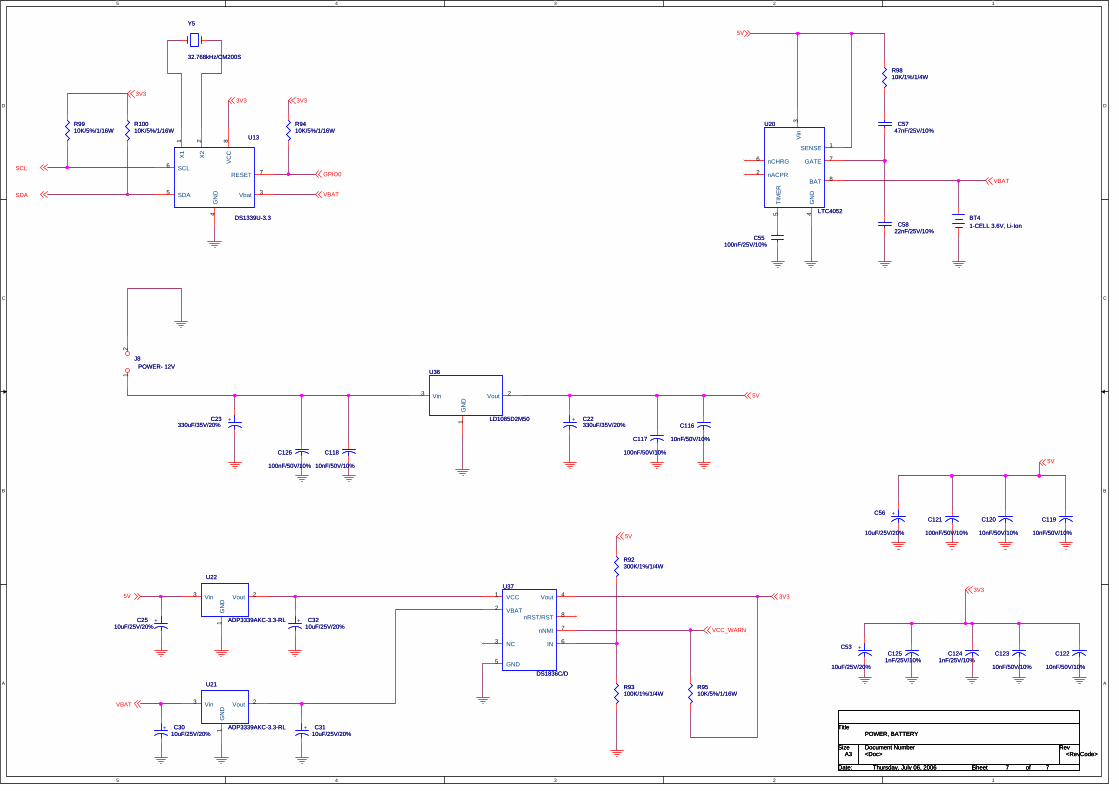
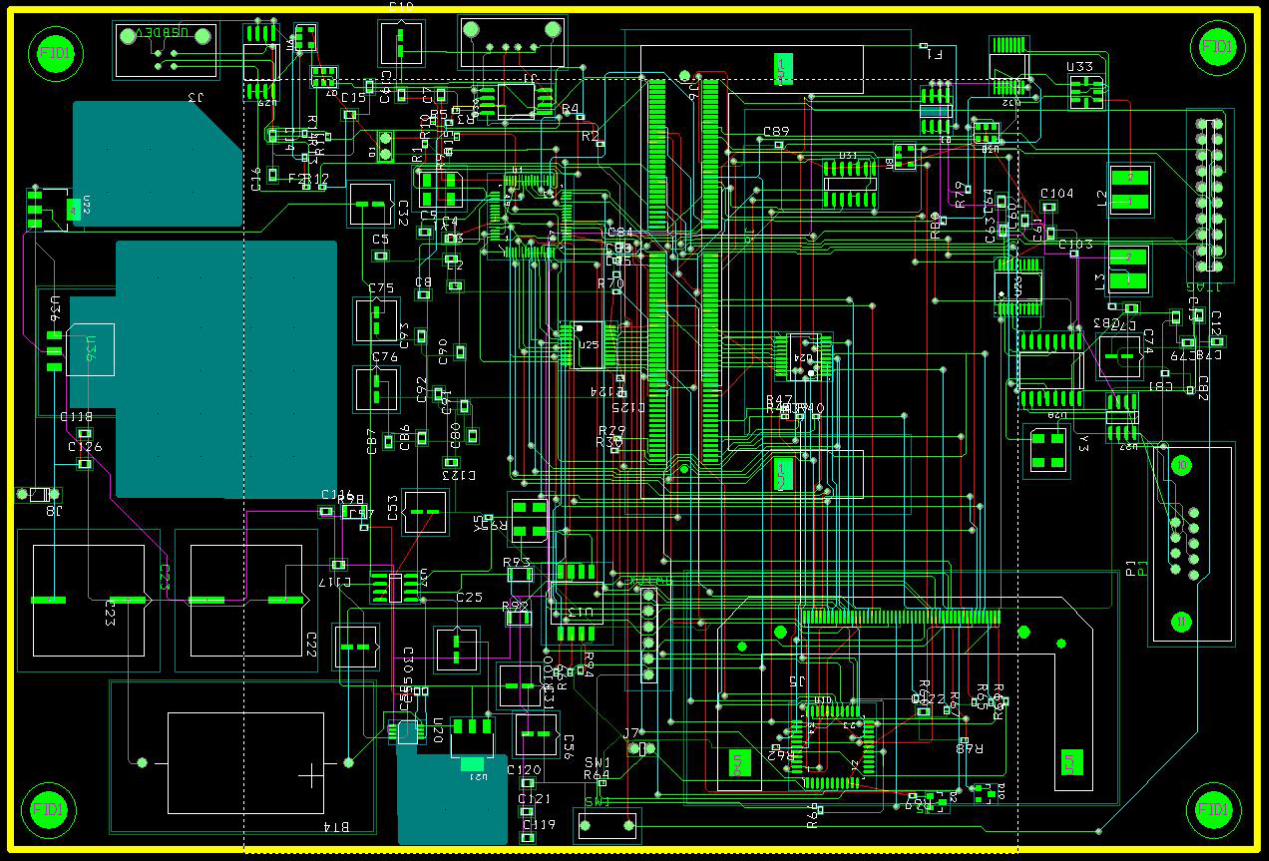
11. Přílohy
1. CD s digitální verzí bakalářské práce.
2. Schémata návrhu rozšiřovací desky k modulu s XScale procesorem.
3. Návrh plošného spoje (Layout z programu OrCAD).
34
Page 42
5
5
4
4
3
3
2
2
1
1
D D
C C
B B
A A
RESET+
-OE
-PWE
-CS2
IRQ_P1
SCLSDA
-PIOW-POE-PIOR
USBN
USBP
-PREG
RESET-
-CS3
SSP_TXDSSP_CLK SSP_FRM
SSP_RXD
MD00MD02MD04MD06MD08MD10MD12MD14
MD01MD03MD05MD07MD09MD11MD13MD15
R/-WR/-W
MA01MA03 MA02
MA10
MA16
-CS4
-PWAIT -PIOIS16
USBINT
H_SUSPENDH_WAKEUP
-WE
HPOWERHSEL_PCONN_DEV-CANINT
-RESET_IN
-RESET_IN
TCKTDOTDI
TMS-TRST
-CSBUS
-CS1-CS2-CS3
-CS4-CS5
3V3
-CSBUS
-CS1
-CS5
VCC_WARN
-CSBUSR/-W
MA04
3V3
3V3
3V3
3V3
3V3
3V3
3V3
3V3
3V3
3V3
3V3
Title
Size Document Number Rev
Date: Sheet of
<Doc> <RevCode>
DIMM Socket 144
A3
1 7Thursday, July 06, 2006
Title
Size Document Number Rev
Date: Sheet of
<Doc> <RevCode>
DIMM Socket 144
A3
1 7Thursday, July 06, 2006
Title
Size Document Number Rev
Date: Sheet of
<Doc> <RevCode>
DIMM Socket 144
A3
1 7Thursday, July 06, 2006
R7010K/5%/1/16W
R7010K/5%/1/16W
1212
13
147
U31A
74LVC11/SO
U31A
74LVC11/SO
C80
10nF/50V/10%
C80
10nF/50V/10%
C841nF/25V/10%
C841nF/25V/10%
+C76
10uF/25V/20%
+C76
10uF/25V/20%
1
24
53U8
NC7S00/SOT23
U8
NC7S00/SOT23
R4433/5%/1/16W
R4433/5%/1/16W
A0 2A1 3A2 4A3 5A4 6A5 7A6 8A7 9
OE 19DIR 1
B018 B117 B216 B315 B414 B513 B612 B711
VC
C20
GN
D10
U24
74LVC245/SO
U24
74LVC245/SO
+C75
10uF/25V/20%
+C75
10uF/25V/20%
R2933/5%/1/16W
R2933/5%/1/16W
C93
10nF/50V/10%
C93
10nF/50V/10%
C86
10nF/50V/10%
C86
10nF/50V/10%
C92
100nF/50V/10%
C92
100nF/50V/10%
C851nF/25V/10%C85
1nF/25V/10%C89
1nF/25V/10%C89
1nF/25V/10%
SW1
SW PUSHBUTTON
SW1
SW PUSHBUTTON
C91
100nF/50V/10%
C91
100nF/50V/10%
C90
10nF/50V/10%
C90
10nF/50V/10%
TSMY1 TSMX 2TSPY3 TSPX 4MICP5 FF_RI/GPIO38 6MICGND7 LINE_IN_R 8LINE_OUT_R9 LINE_IN_L 10VREFDRV11 LINE_OUT_L 12AD313 AD2 14AD115 AD0 16AGND17 GND7 18TMS19 TCK 20-TRST21 TDO 22-RESET_INPUT23 TDI 24-RESET_OUT25 L_BIAS/GPIO77 26BT_RXD/GPIO4227 BATT_FAULT 28BT_TXD/GPIO4329 IR_RXD/GPIO46 30FF_RXD/GPIO3431 IR_TXD/GPIO47 32FF_RXD/GPIO3933 USB_N 34+3.3V_A35 +3.3V 36SDA37 USB_P 38SSP_TXD/GPIO2539 SCL 40SSP_CLK/GPIO2341 SSP_FRM/GPIO24 42DREQ0/GPIO2043 SSP_RXD/GPIO26 44FF_DCD/GPIO3645 DREQ1/GPIO19 46FF_DTR/GPIO4047 FF_DSR/GPIO37 48FF_RTS/GPIO4149 FF_CTS/GPIO35 50BT_RTS/GPIO4551 BT_CTS/GPIO44 52GPIO1053 GPIO11 54LDD14/GPIO7255 LDD15/GPIO73 56LDD12/GPIO7057 LDD13/GPIO71 58LDD10/GPIO6859 LDD11/PGIO69 60LDD8/GPIO6661 LDD9/GPIO67 62GPIO063 GPIO1 64GND165 GND6 66L_FCLK/GPIO7467 L_LCLK/GPIO75 68L_PCLK/GPIO7669 LDD6/GPIO64 70LDD7/GPIO6571 LDD4/GPIO62 72LDD5/GPIO6373 LDD2/GPIO60 74LDD3/GPIO6175 LDD0/GPIO58 76LDD1/GPIO5977 GND5 78-PWE/GPIO4979 -POE/GPIO48 80-PIOW/GPIO5181 -PIOR/GPIO50 82-PWAIT/GPIO5683 -PIOIS16/GPIO57 84-PREG/GPIO5585 -PSKTSEL/GPIO54 86-PCE1/GPIO5287 -PCE2/GPIO53 88+3.3V89 +3.3V 90D1491 D15 92D1293 D13 94D1095 D11 96D897 D9 98D699 D7 100D4101 D5 102D2103 D3 104D0105 D1 106GND2107 GND4 108RDY/GPIO18109 -WE 110RD/-WR111 -OE 112GND3113 -CS5/GPIO33 114-CS4/GPIO80115 -CS3/GPIO79 116-CS2/GPIO78117 -CS1/GPIO15 118A25119 A24 120A23121 A22 122A21123 A20 124A19125 A18 126A17127 A16 128A15129 A14 130A13131 A12 132A11133 A10 134A9135 A8 136A7137 A6 138A5139 A4 140A3141 A2 142A1143 A0 144
J6
DIMM144
J6
DIMM144
A02A13A24A35A46A57A68A79
OE19 DIR1
B0 18B1 17B2 16B3 15B4 14B5 13B6 12B7 11
VC
C20
GN
D10
U25
74LVC245/SO
U25
74LVC245/SO
C87
10nF/50V/10%
C87
10nF/50V/10%
89
1011
147
U31C
74LVC11/SO
U31C
74LVC11/SO
R3033/5%/1/16W
R3033/5%/1/16W
R4033/5%/1/16W
R4033/5%/1/16W
6345
147
U31B
74LVC11/SO
U31B
74LVC11/SO
R3933/5%/1/16W
R3933/5%/1/16W
C881nF/25V/10%
C881nF/25V/10%
R4733/5%/1/16W
R4733/5%/1/16W
Page 43
5
5
4
4
3
3
2
2
1
1
D D
C C
B B
A A
3V3
MA01
-OE-WE
H_WAKEUP
RESET+
-CS2
MD00MD01MD02MD03MD04MD05MD06MD07MD08MD09MD10MD11MD12MD13MD14MD15
H_SUSPEND
MA02
USBINT
HPOWER
HSEL_P
3V3
5V
3V3
3V3
3V3
Title
Size Document Number Rev
Date: Sheet of
<Doc> <RevCode>
USB HOST
A3
2 7Thursday, July 06, 2006
Title
Size Document Number Rev
Date: Sheet of
<Doc> <RevCode>
USB HOST
A3
2 7Thursday, July 06, 2006
Title
Size Document Number Rev
Date: Sheet of
<Doc> <RevCode>
USB HOST
A3
2 7Thursday, July 06, 2006
Sviti OK, blika Error
C847pF/50V/10%C847pF/50V/10%
C11100nF/50V/10%
C11100nF/50V/10%
Q1NDS9435A/SOQ1NDS9435A/SO
C5
100nF/50V/10%
C5
100nF/50V/10%
R522/5%/1/16WR522/5%/1/16W
F1 B 2
F1
BLM21P221SG
F1
BLM21P221SG
R910K/5%/1/16W
R910K/5%/1/16W
R10470/5%/1/16W
R10470/5%/1/16W
Y1
HCM49-6.000MABJT
Y1
HCM49-6.000MABJT
C2
100uF/50V/10%
C2
100uF/50V/10%
C4
100nF/50V/10%
C4
100nF/50V/10%
C947pF/50V/10%
C947pF/50V/10%
C718PF/50V/5%
C718PF/50V/5%
R315K/5%/1/16WR315K/5%/1/16W
GN
D3
1C
2
GN
D4
3D
4
GN
D2
5B
6
GN
D1
7A
8
U30
SN75240PW
U30
SN75240PW
+ C1022uF/16V/20%
+ C1022uF/16V/20%
R2
15K/5%/1/16W
R2
15K/5%/1/16W
C3
100nF/50V/10%
C3
100nF/50V/10%
D1
LED
D1
LED
R4 22/5%/1/16WR4 22/5%/1/16W
A059 A160
D0063 D0164 D022 D033 D044 D055 D066 D077 D089 D0910 D1011 D1112 D1213 D1314 D1416 D1517
nCS21nWR23nRD22
INT129 INT230
nRESET32
DREQ125
DREQ226
nDACK127
nDACK228D
GN
D1
DG
ND
8D
GN
D15
DG
ND
18D
GN
D35
DG
ND
62D
GN
D45
AG
ND
57
TEST 31
EOT 34
XTAL1 43XTAL2 44
D_VBUS 39
CLKOUT 41
nGL 38
D_DP 49D_DM 48
H_DP1 51
H_DP2 53
H_DM1 50
H_DM2 52
nH_PSW1 46
nH_PSW2 47
nH_OC1 54
nH_OC2 55
NDP_SEL 33
D_SUSPEND 36
H_SUSPEND 42
D_WAKEUP 37
H_WAKEUP 40
VC
C56
Vre
g(3.
3)58
Vho
ld2
24V
hold
119U1
ISP1161A1
U1
ISP1161A1
R110K/5%/1/16W
R110K/5%/1/16W
VBUS1
DM2DP3
GND4SHIELD15SHIELD26
J1
USBHOST
J1
USBHOST
C618pF/50V/5%C618pF/50V/5%
R1510K/5%/1/16W
R1510K/5%/1/16W
Page 44
5
5
4
4
3
3
2
2
1
1
D D
C C
B B
A A
USBNUSBP
CONN_DEV
3V3
3V3
Title
Size Document Number Rev
Date: Sheet of
<Doc> <RevCode>
USB DEVICE
A3
3 7Thursday, July 06, 2006
Title
Size Document Number Rev
Date: Sheet of
<Doc> <RevCode>
USB DEVICE
A3
3 7Thursday, July 06, 2006
Title
Size Document Number Rev
Date: Sheet of
<Doc> <RevCode>
USB DEVICE
A3
3 7Thursday, July 06, 2006
C16100nF/50V/10%C16100nF/50V/10%
F1 B 2
F2
BLM21P221SG
F2
BLM21P221SG
R1233/5%/1/16W
R1233/5%/1/16W
C1547pF/50V/10%
C1547pF/50V/10%
GN
D3
1C
2
GN
D4
3D
4
GN
D2
5B
6
GN
D1
7A
8
U29
SN75240PW
U29
SN75240PW
VBUS1
D-2D+3
GND4
SCHIELD15SCHIELD26
J3
USBDEVICE
J3
USBDEVICE
Q7BSS84Q7BSS84
R1333K/5%/1/16W
R1333K/5%/1/16W
24
53
U6
NC7SZ14/SOT23
U6
NC7SZ14/SOT23
R141.5K/5%/1/16W
R141.5K/5%/1/16W
R1133/5%/1/16W
R1133/5%/1/16W
C1447pF/50V/10%C1447pF/50V/10%
Page 45
5
5
4
4
3
3
2
2
1
1
D D
C C
B B
A A
SCL
SDA
3V3 5V
5V
Title
Size Document Number Rev
Date: Sheet of
<Doc> <RevCode>
Akcelerometr a ADC
A3
4 7Thursday, July 06, 2006
Title
Size Document Number Rev
Date: Sheet of
<Doc> <RevCode>
Akcelerometr a ADC
A3
4 7Thursday, July 06, 2006
Title
Size Document Number Rev
Date: Sheet of
<Doc> <RevCode>
Akcelerometr a ADC
A3
4 7Thursday, July 06, 2006
R8015K/5%/1/16WR8015K/5%/1/16W
L3
100uH/520mA
L3
100uH/520mA
CH0 1CH1 2CH2 3CH3 4CH4 5CH5 6CH6 7CH7 8
COM 11
GND9
Vref10
A012A113
VD
D16
SCL14SDA15
U32
ADS7828
U32
ADS7828
VD
D3
1
Yout2
GN
D3
ST 4
NC 5Xout6
VD
D1
7V
DD
28U33
ADXL278
U33
ADXL278
R7915K/5%/1/16W
R7915K/5%/1/16W
C103
1nF/25V/10%
C103
1nF/25V/10%
L2
100uH/520mA
L2
100uH/520mA
C104
10nF/50V/10%
C104
10nF/50V/10%
D11 G1
2
S2 3D24
G2
5
S1 6
U38
FDG6303N
U38
FDG6303N
Page 46
5
5
4
4
3
3
2
2
1
1
D D
C C
B B
A A
SSP_FRMSSP_CLKSSP_TXD
SSP_RXD
RESET-
-CANINT
3V3
5V
5V
Title
Size Document Number Rev
Date: Sheet of
<Doc> <RevCode>
CAN interface - SPI
A3
5 7Thursday, July 06, 2006
Title
Size Document Number Rev
Date: Sheet of
<Doc> <RevCode>
CAN interface - SPI
A3
5 7Thursday, July 06, 2006
Title
Size Document Number Rev
Date: Sheet of
<Doc> <RevCode>
CAN interface - SPI
A3
5 7Thursday, July 06, 2006
TXD1
GN
D2
VC
C3
RXD4
Vref5
CANL 6
CANH 7Rs8
U27
PCA82C251
U27
PCA82C251
A0 2A1 3A2 4A3 5A4 6A5 7A6 8A7 9
OE 19DIR 1
B018B117B216B315B414B513B612B711
VC
C20
GN
D10
U26
74LVC245/SO
U26
74LVC245/SO
Y3
HCM49-20.000MABJT
Y3
HCM49-20.000MABJT
594837261
P1
DB9 - Male
P1
DB9 - Male
VC
C1
GN
D2
nCS4SPICLK5
MISO7 MOSI8
TXCAN 9
RXCAN 10
nINT12
nRESET13
XTAL2 15XTAL1 16
U28
CC750
U28
CC750
C6310nF/50V/10%
C6310nF/50V/10%
C6010nF/50V/10%
C6010nF/50V/10%
C61
10nF/50V/10%
C61
10nF/50V/10%
C6410nF/50V/10%
C6410nF/50V/10%
C1318PF/50V/5%
C1318PF/50V/5%
C1218PF/50V/5%C1218PF/50V/5%
Page 47
5
5
4
4
3
3
2
2
1
1
D D
C C
B B
A A
P1_BVD2/-SPKRP1_BVD1/-STSCHG
-P1_INPACK-P1_INPACK-P1_WAIT-P1_WAIT-P1_WAIT-P1_WAIT
CD1_2CD2_2
-P1_IOIS16
-P1_WAIT-P1_WAIT
MD00MD01MD02
MD03MD04MD05MD06MD07
MD08MD09MD10
MD11MD12MD13MD14MD15
MA00MA01MA02MA03MA04MA05MA06
MA07MA08MA09
MA10
-PWE
-POE
-PIOR-PIOW
RESET+
-PREG
IRQ_P1
CE1_2
CE1_2
CD1_2CD2_2-P1_IOIS16
CE2_2
CE2_2
-P1_WAIT
-P1_IOIS16
CD2_2CD1_2
MA03MA04
MA16-P1_WAIT
-CS4
-PWAIT-PIOIS16
R/-W
-CS3MA10
CD1_3CE1_4-P1_WAITCD2_1CD1_3
CE1_4
CD2_1
-TRSTTDITMSTCK
TDO-RESET_IN
3V3
3V3
3V3
3V3
3V3
3V3
3V3
3V33V3
3V3
Title
Size Document Number Rev
Date: Sheet of
<Doc> <RevCode>
Compact Flash, CPLD - Xilin + X_JTAG, JTAG
A3
6 7Thursday, July 06, 2006
Title
Size Document Number Rev
Date: Sheet of
<Doc> <RevCode>
Compact Flash, CPLD - Xilin + X_JTAG, JTAG
A3
6 7Thursday, July 06, 2006
Title
Size Document Number Rev
Date: Sheet of
<Doc> <RevCode>
Compact Flash, CPLD - Xilin + X_JTAG, JTAG
A3
6 7Thursday, July 06, 2006
R604.7K/5%/1/16W
R604.7K/5%/1/16W
R674.7K/5%/1/16W
R674.7K/5%/1/16W
R644.7K/5%/1/16W
R644.7K/5%/1/16W
VREF1 VDD 2*TRST3 VSS 4TDI5 VSS 6TMS7 VSS 8TCK9 VSS 10RTCK11 VSS 12TDO13 VSS 14*SRST15 VSS 16DBGRQ17 VSS 18DBGACK19 VSS 20
J10
JTAG
J10
JTAG
IO1/4/TDI1IO1/52IO1/63
IO1/142IO1/243IO1/344
IO2/1 35IO2/2 34IO2/3 33
IO2/4/TDO 32IO2/5 31IO2/6 30IO2/7 28IO2/8 27
IO2/9/TCK 26IO2/10 25IO2/11 23IO2/12 22IO2/13 21IO2/14 20IO2/15 19IO2/16 18
IN3/CLK337 IN2/CLK238 IN1/CLK139 IN0/CLK040
PORT_EN4
VCC 9VCC 17VCC 29VCC 41
GND 16GND 24GND 36
IO1/75IO1/86IO1/9/TMS7IO1/108IO1/1110IO1/1211IO1/1312IO1/1413IO1/1514IO1/1615
U10
XCR3032VQFP
U10
XCR3032VQFP
1 2J7
JUMPER
J7
JUMPER
C79
10nF/50V/10%
C79
10nF/50V/10%
C78
10nF/50V/10%
C78
10nF/50V/10%
123456
J9
X_JTAG
J9
X_JTAG
R654.7K/5%/1/16W
R654.7K/5%/1/16W
C831nF/25V/10%
C831nF/25V/10%
C811nF/25V/10%
C811nF/25V/10%
C821nF/25V/10%C82
1nF/25V/10%
R624.7K/5%/1/16W
R624.7K/5%/1/16W
D10
BAR43A
D10
BAR43A
R6610K/5%/1/16WR6610K/5%/1/16W
D2
BAR43A
D2
BAR43A
R684.7K/5%/1/16W
R684.7K/5%/1/16W
R694.7K/5%/1/16WR694.7K/5%/1/16W
C77
10nF/50V/10%
C77
10nF/50V/10%
R634.7K/5%/1/16W
R634.7K/5%/1/16W
R614.7K/5%/1/16W
R614.7K/5%/1/16W
+C74
10uF/25V/20%
+C74
10uF/25V/20%
GND1 1D3 2D4 3D5 4D6 5D7 6
nCE1 7A10 8nOE 9
A9 10A8 11A7 12
VCC1 13A6 14A5 15A4 16A3 17A2 18A1 19A0 20D0 21D1 22D2 23
nIOIS16 24nCD2 25nCD1 26
D11 27D12 28D13 29D14 30D15 31
nCE2 32nVS1 33
nIORD 34nIOWR 35
nWE 36IRQ 37
VCC2 38nCSEL 39
nVS2 40RESET 41nWAIT 42
nINPACK 43nREG 44
BVD2/SPKR 45BVD1/STSCHG 46
D8 47D9 48
D10 49GND2 50
J5
COMPACT_FLASH
J5
COMPACT_FLASH
Page 48
5
5
4
4
3
3
2
2
1
1
D D
C C
B B
A A
VCC_WARN
VBAT
VBAT
GPIO0SCL
SDA
VBAT
3V33V33V3
3V33V3
5V
5V
5V
5V
5V
Title
Size Document Number Rev
Date: Sheet of
<Doc> <RevCode>
POWER, BATTERY
A3
7 7Thursday, July 06, 2006
Title
Size Document Number Rev
Date: Sheet of
<Doc> <RevCode>
POWER, BATTERY
A3
7 7Thursday, July 06, 2006
Title
Size Document Number Rev
Date: Sheet of
<Doc> <RevCode>
POWER, BATTERY
A3
7 7Thursday, July 06, 2006
R9410K/5%/1/16WR9410K/5%/1/16W
C123
10nF/50V/10%
C123
10nF/50V/10%
C117
100nF/50V/10%
C117
100nF/50V/10%
GN
D1
Vout 2Vin3
U21
ADP3339AKC-3.3-RL
U21
ADP3339AKC-3.3-RL
+C23330uF/35V/20%
+C23330uF/35V/20%
C121
100nF/50V/10%
C121
100nF/50V/10%
C126
100nF/50V/10%
C126
100nF/50V/10%
GN
D1
Vout 2Vin3
U22
ADP3339AKC-3.3-RL
U22
ADP3339AKC-3.3-RL
C116
10nF/50V/10%
C116
10nF/50V/10%
R93100K/1%/1/4WR93100K/1%/1/4W
+ C22330uF/35V/20%
+ C22330uF/35V/20%
BT41-CELL 3.6V, Li-IonBT41-CELL 3.6V, Li-IonC58
22nF/25V/10%C58
22nF/25V/10%
R92300K/1%/1/4WR92300K/1%/1/4W
R9810K/1%/1/4WR9810K/1%/1/4W
Y5
32.768kHz/CM200S
Y5
32.768kHz/CM200S
C1241nF/25V/10%
C1241nF/25V/10%
C55100nF/25V/10%
C55100nF/25V/10%
X1
1
X2
2
GN
D4
VC
C8
SDA5
SCL6
Vbat 3
RESET 7
U13
DS1339U-3.3
U13
DS1339U-3.3
R9510K/5%/1/16WR9510K/5%/1/16W
+C53
10uF/25V/20%
+C53
10uF/25V/20%
+ C3010uF/25V/20%
+ C3010uF/25V/20%
+C56
10uF/25V/20%
+C56
10uF/25V/20%
C1251nF/25V/10%C125
1nF/25V/10%
C120
10nF/50V/10%
C120
10nF/50V/10%
C119
10nF/50V/10%
C119
10nF/50V/10%
+ C3110uF/25V/20%
+ C3110uF/25V/20%
C5747nF/25V/10%
C5747nF/25V/10%
SENSE 1
nACPR2
Vin
3
GN
D4
TIM
ER
5
nCHRG6 GATE 7
BAT 8
U20
LTC4052
U20
LTC4052
12
J8POWER- 12V
J8POWER- 12V
R10010K/5%/1/16WR10010K/5%/1/16W
R9910K/5%/1/16WR9910K/5%/1/16W
C122
10nF/50V/10%
C122
10nF/50V/10%
Vin3 Vout 2
GN
D1
U36
LD1085D2M50
U36
LD1085D2M50
+ C3210uF/25V/20%
+ C3210uF/25V/20%
C118
10nF/50V/10%
C118
10nF/50V/10%
+C2510uF/25V/20%
+C2510uF/25V/20%
VCC1
VBAT2
NC3
Vout 4
GND5
IN 6
nNMI 7
nRST/RST 8
U37
DS1836C/D
U37
DS1836C/D