Mechanika
Kinematika studuje geometrii pohybu robotu a trajektorie, po kterych sepohybujı jednotlive body. Klıcovy pojem je poloha.
Pouzite pojmy a zakony mohou byt pouzity na jakekoliv mechanicke stroje.
1 2
3 4
5 6
7 8
9 10
11 12
13 14
15 16
17 18
19 20
21 22
23 24
2/24
Kinematika – Terminologie
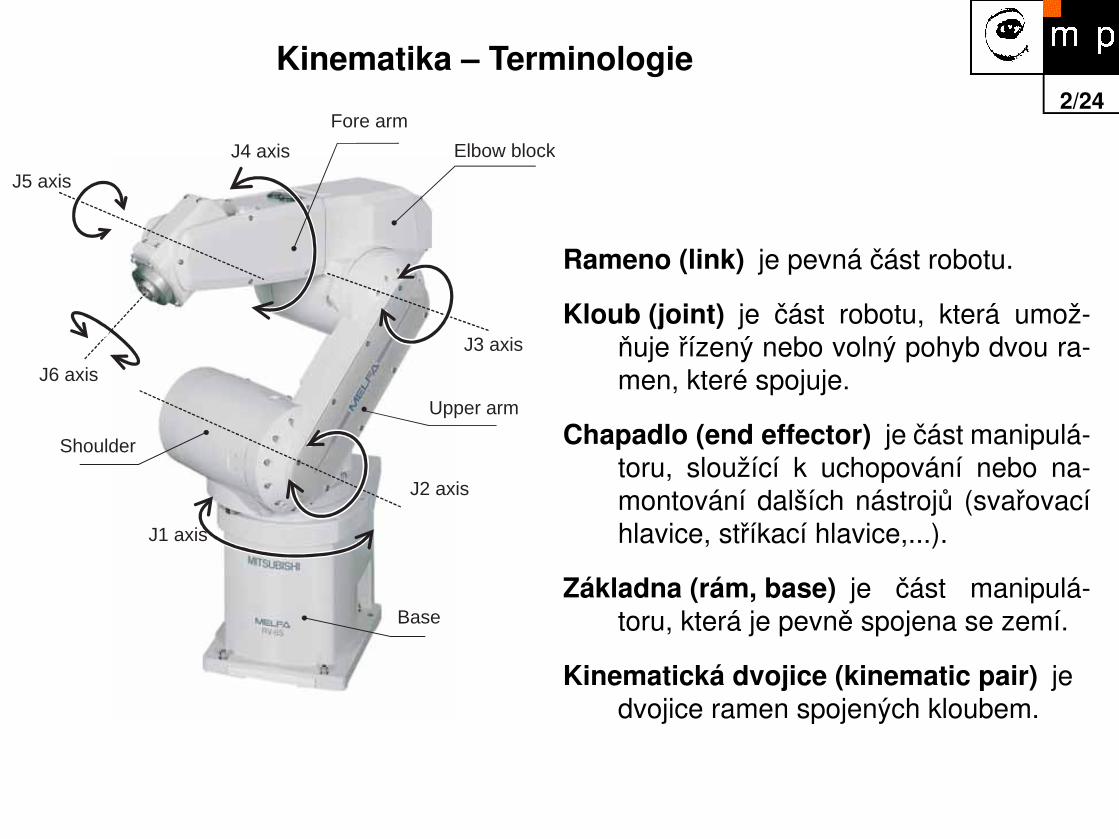
J5 axisJ4 axis
Fore armElbow block
J3 axis
Upper arm
J2 axis
Base
J1 axis
Shoulder
J6 axis
Rameno (link) je pevna cast robotu.
Kloub (joint) je cast robotu, ktera umoz-nuje rızeny nebo volny pohyb dvou ra-men, ktere spojuje.
Chapadlo (end effector) je cast manipula-toru, slouzıcı k uchopovanı nebo na-montovanı dalsıch nastroju (svarovacıhlavice, strıkacı hlavice,...).
Zakladna (ram, base) je cast manipula-toru, ktera je pevne spojena se zemı.
Kinematicka dvojice (kinematic pair) jedvojice ramen spojenych kloubem.
3/24
Kinematika – Terminologie II
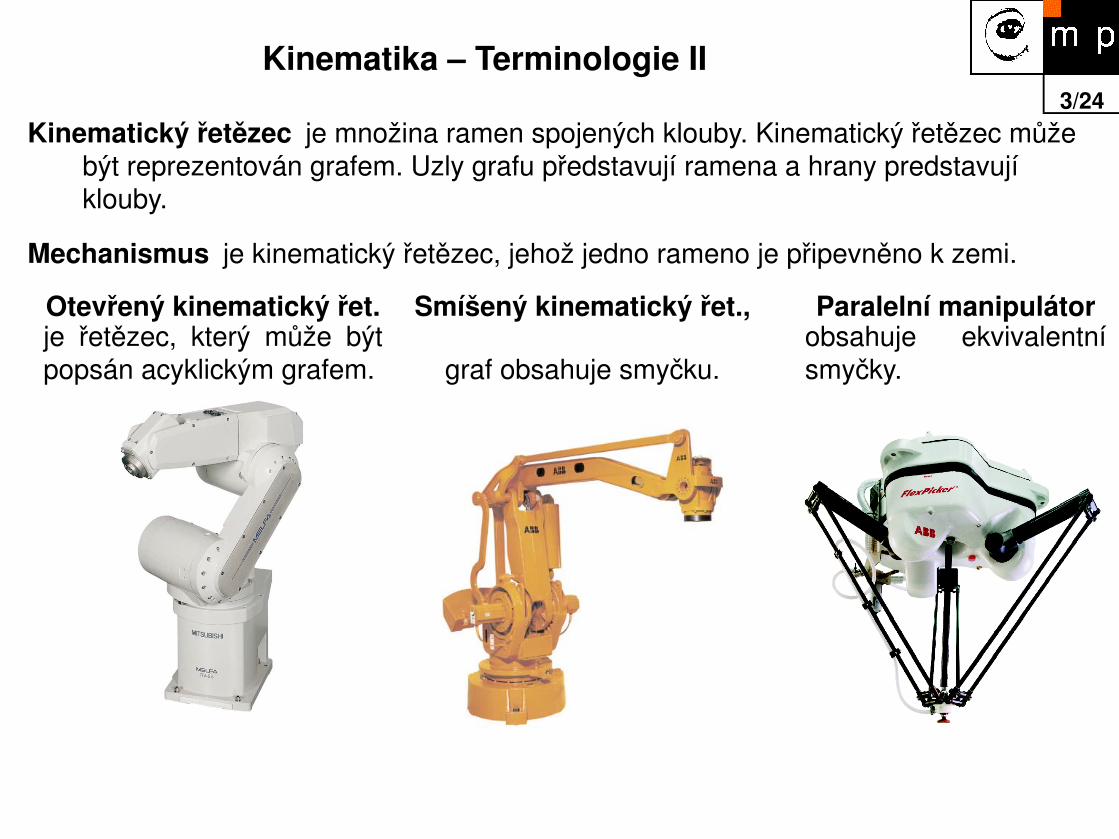
Kinematicky retezec je mnozina ramen spojenych klouby. Kinematicky retezec muzebyt reprezentovan grafem. Uzly grafu predstavujı ramena a hrany predstavujıklouby.
Mechanismus je kinematicky retezec, jehoz jedno rameno je pripevneno k zemi.
Otevreny kinematicky ret. Smıseny kinematicky ret., Paralelnı manipulatorje retezec, ktery muze bytpopsan acyklickym grafem. graf obsahuje smycku.
obsahuje ekvivalentnısmycky.
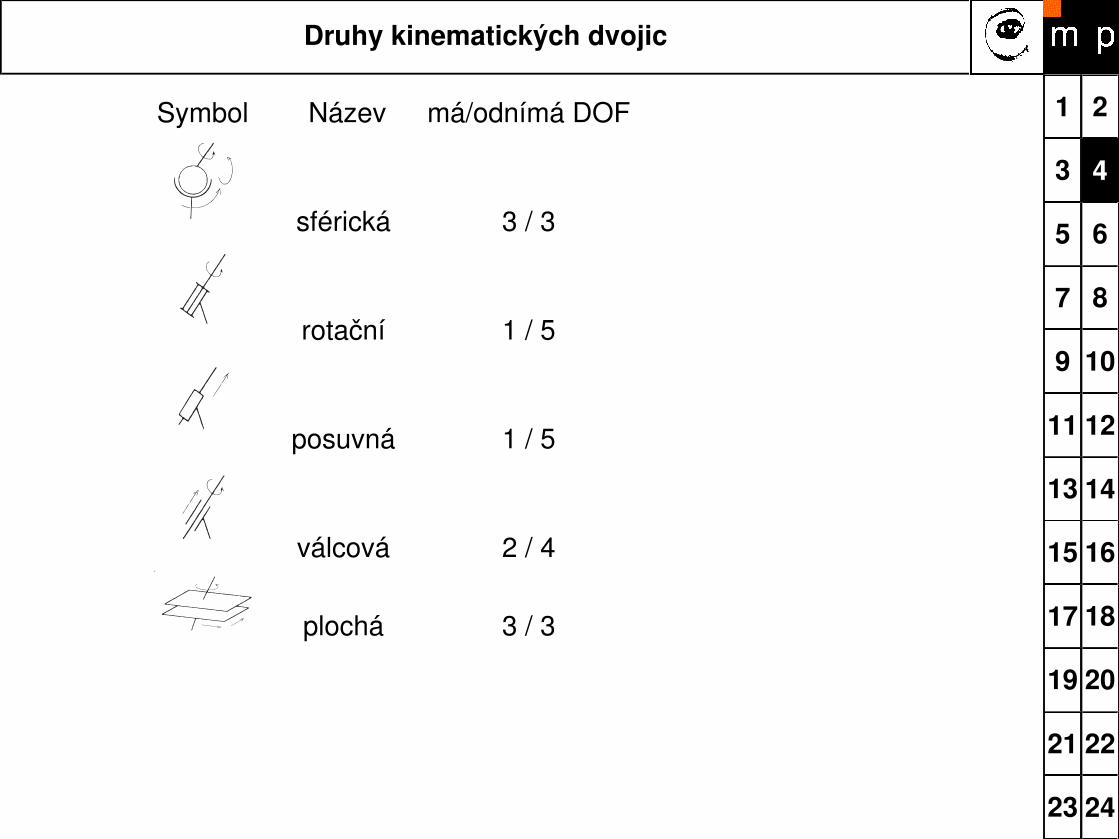
Druhy kinematickych dvojic
Symbol Nazev ma/odnıma DOF
sfericka 3 / 3
rotacnı 1 / 5
posuvna 1 / 5
valcova 2 / 4
plocha 3 / 3
1 2
3 4
5 6
7 8
9 10
11 12
13 14
15 16
17 18
19 20
21 22
23 24
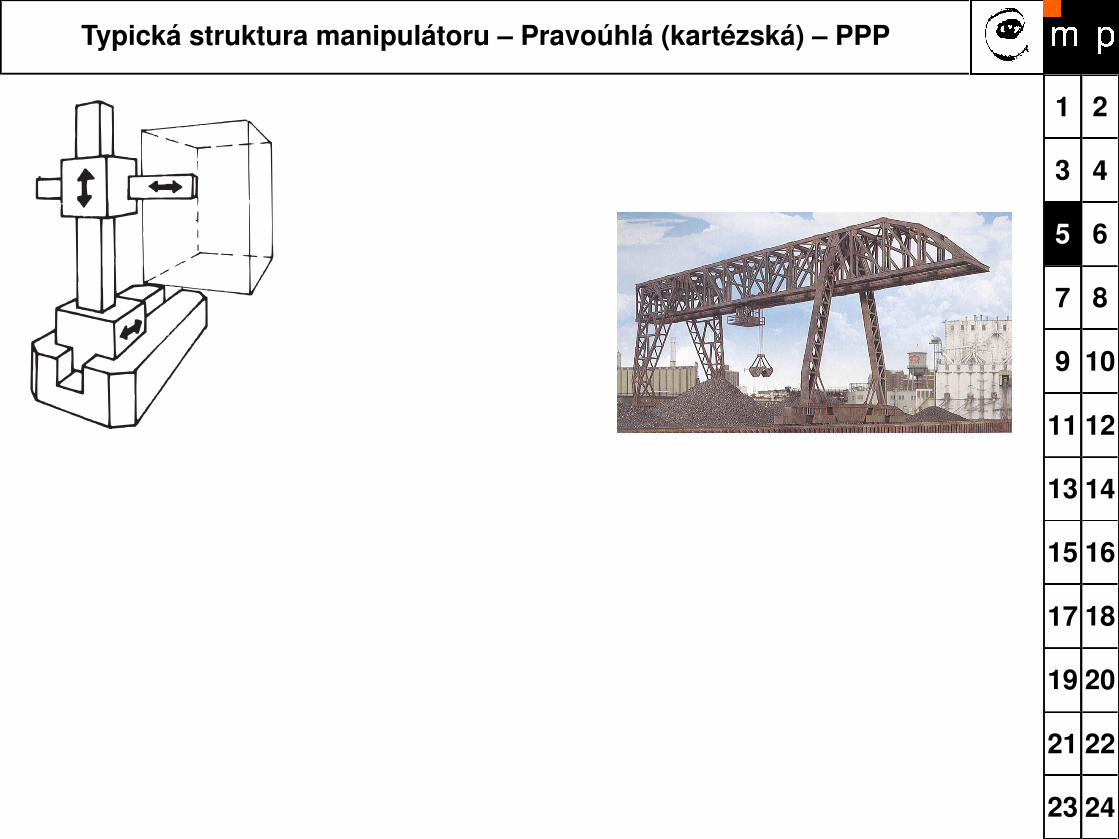
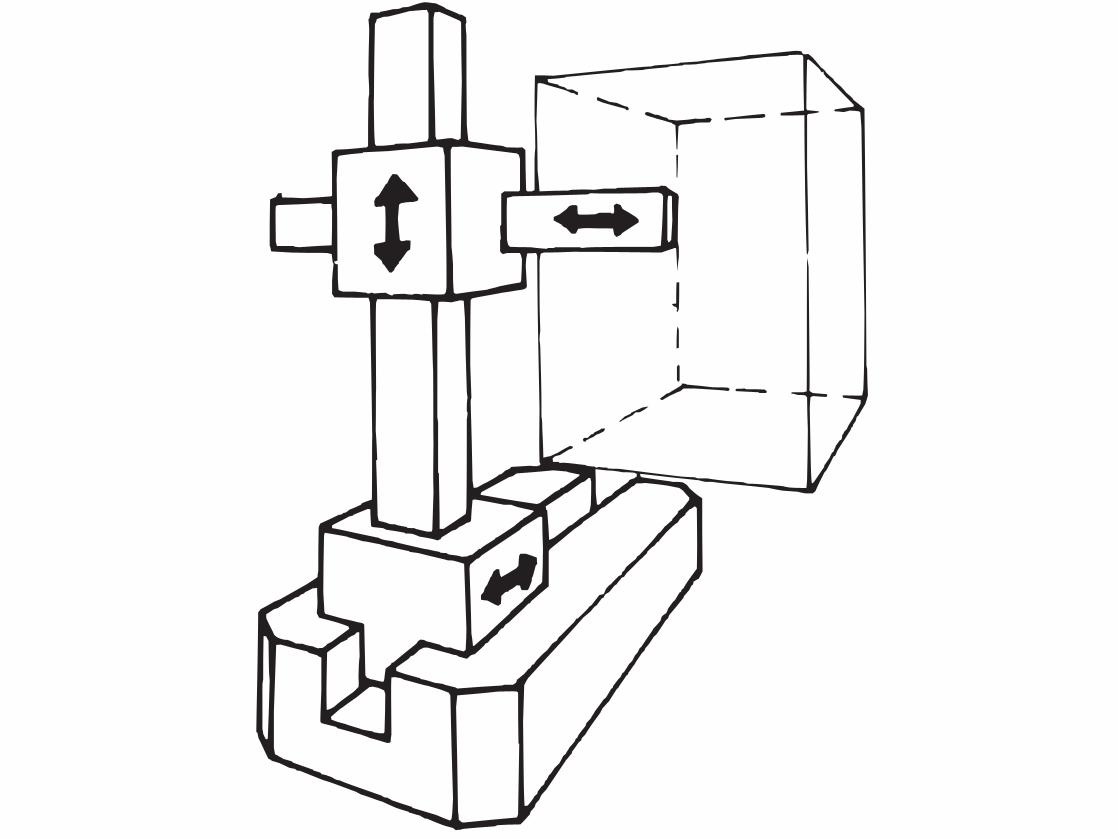
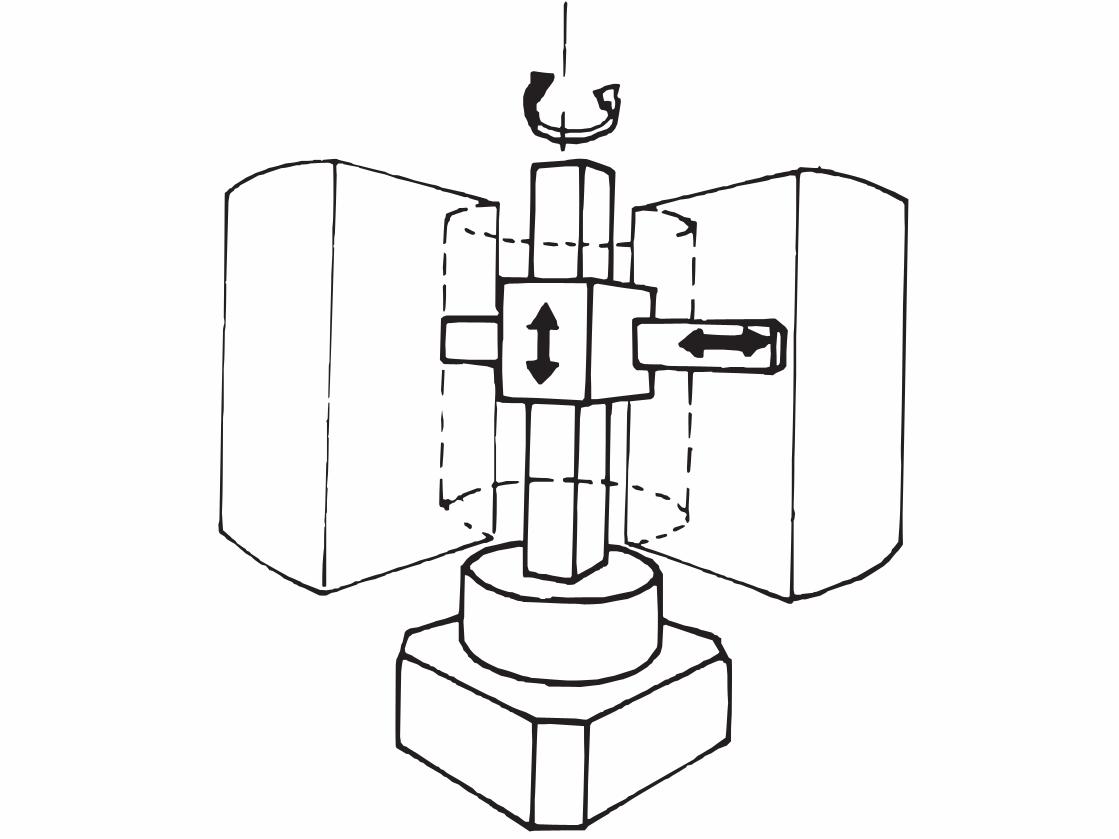
Typicka struktura manipulatoru – Pravouhla (kartezska) – PPP
1 2
3 4
5 6
7 8
9 10
11 12
13 14
15 16
17 18
19 20
21 22
23 24
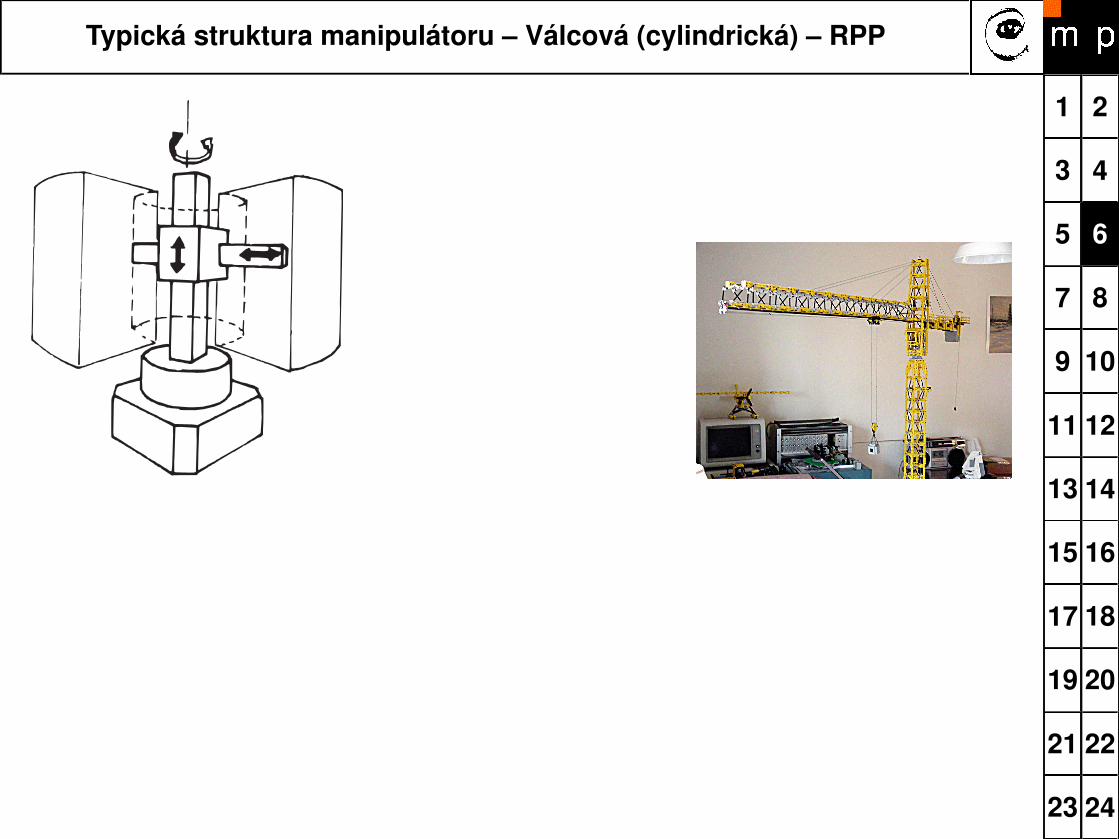
Typicka struktura manipulatoru – Valcova (cylindricka) – RPP
1 2
3 4
5 6
7 8
9 10
11 12
13 14
15 16
17 18
19 20
21 22
23 24
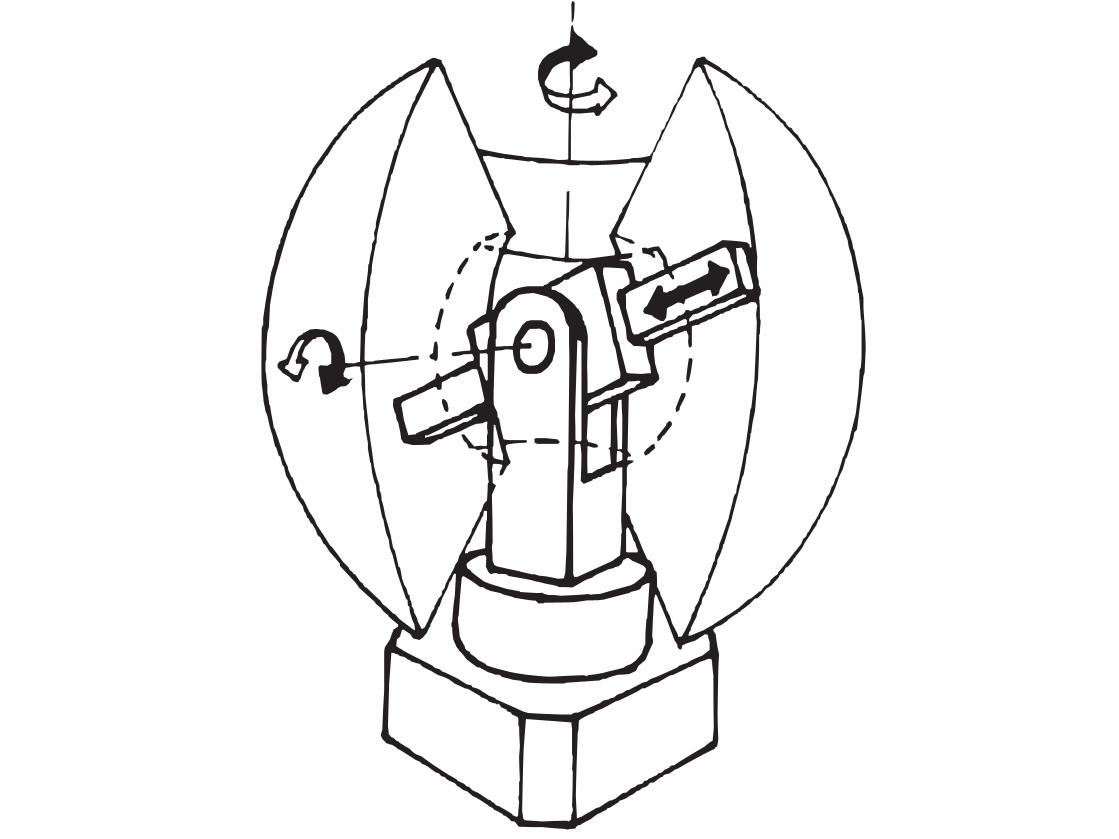
Typicka struktura manipulatoru – Sfericka – RRP
1 2
3 4
5 6
7 8
9 10
11 12
13 14
15 16
17 18
19 20
21 22
23 24
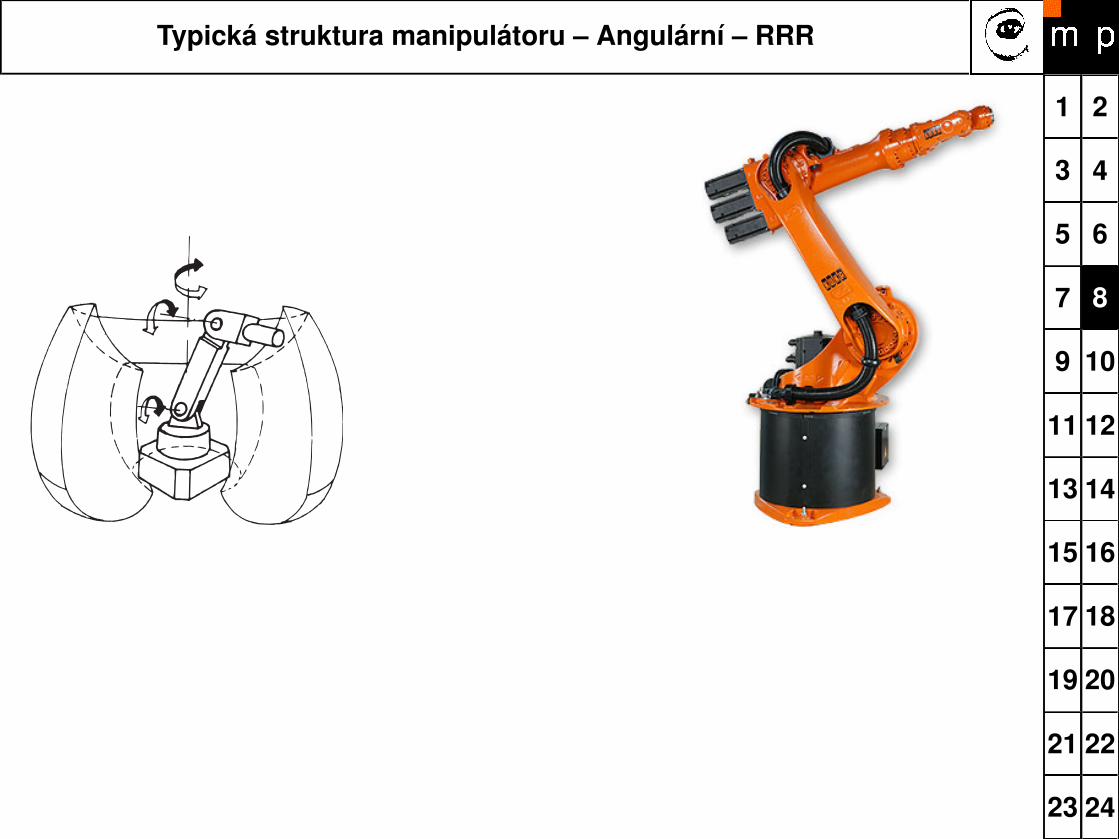
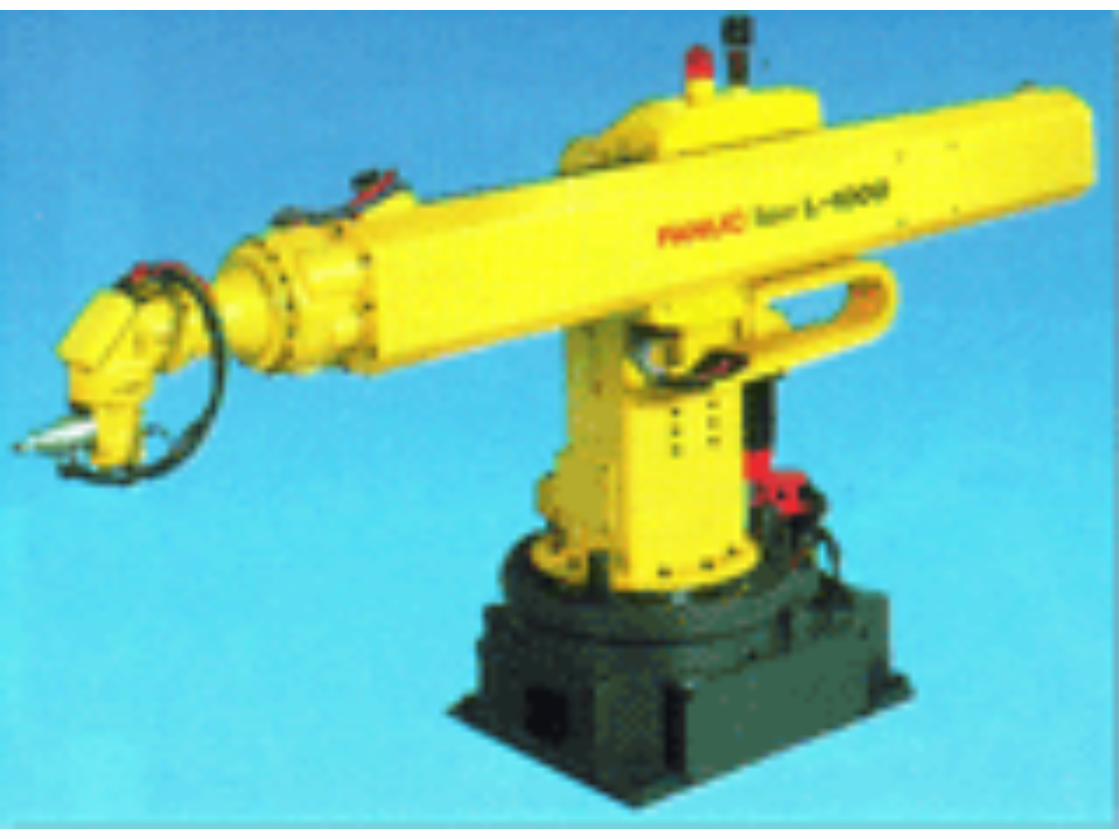
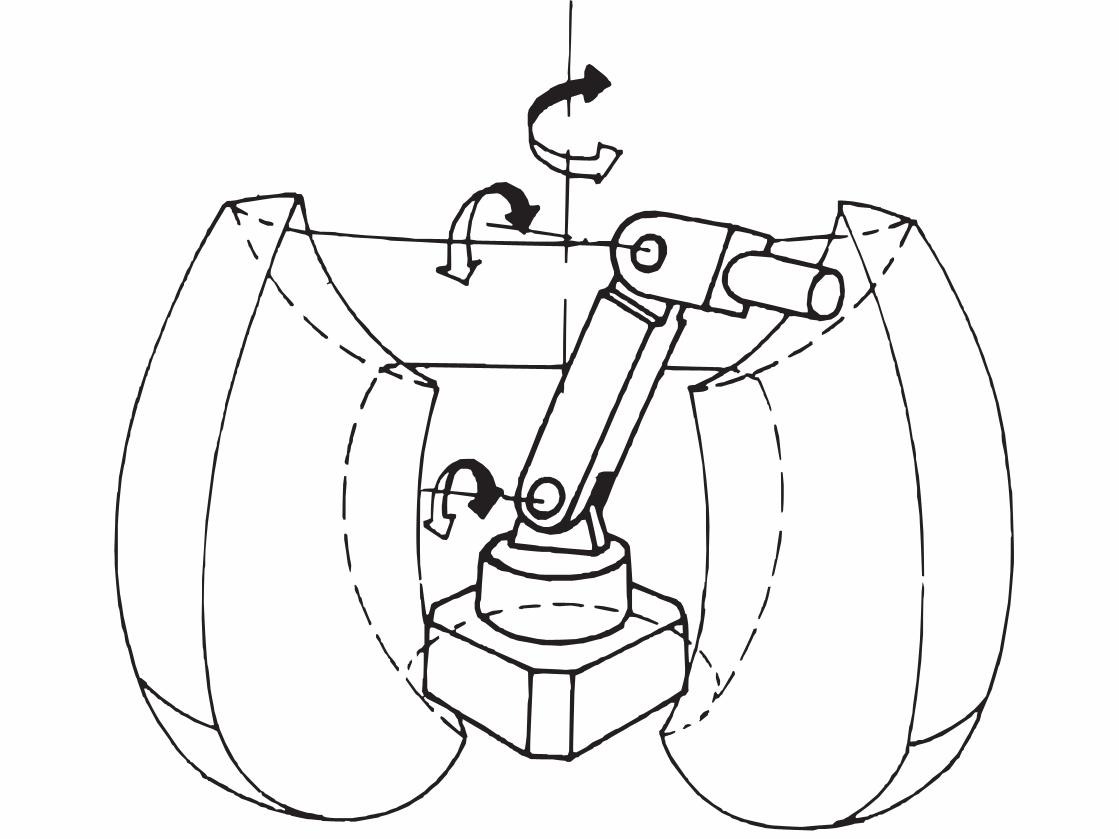
Typicka struktura manipulatoru – Angularnı – RRR
1 2
3 4
5 6
7 8
9 10
11 12
13 14
15 16
17 18
19 20
21 22
23 24
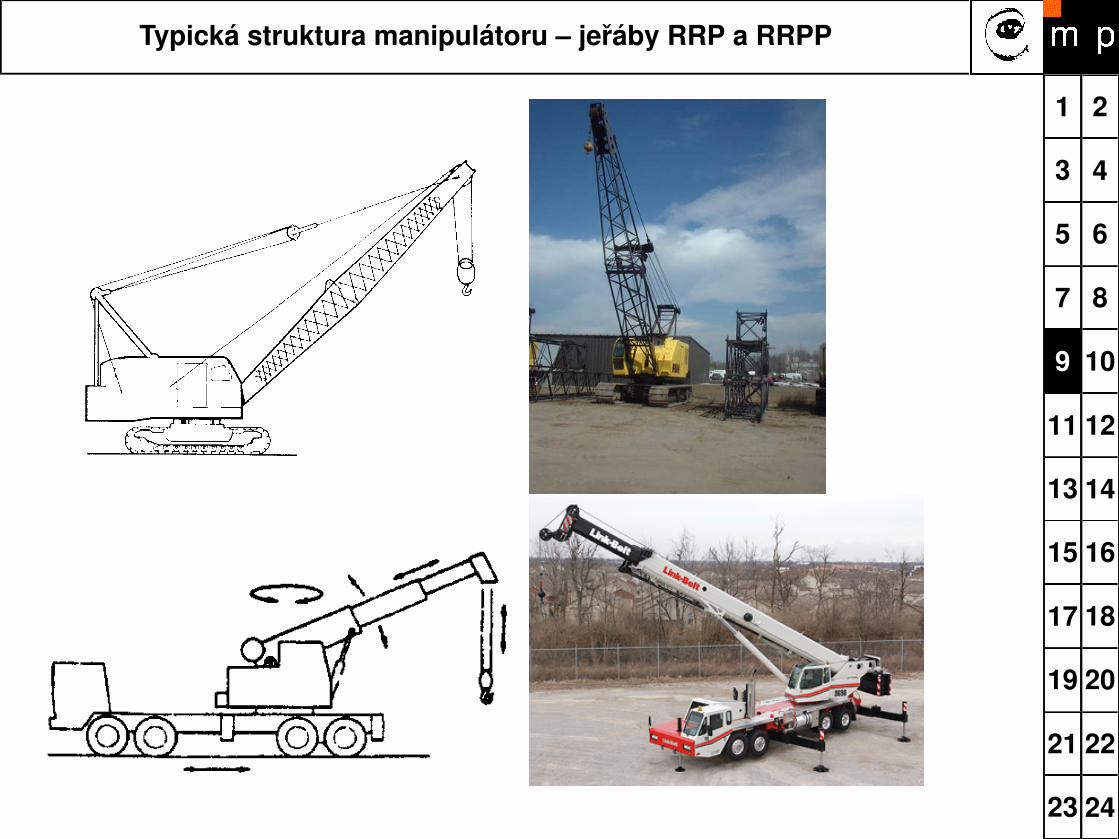
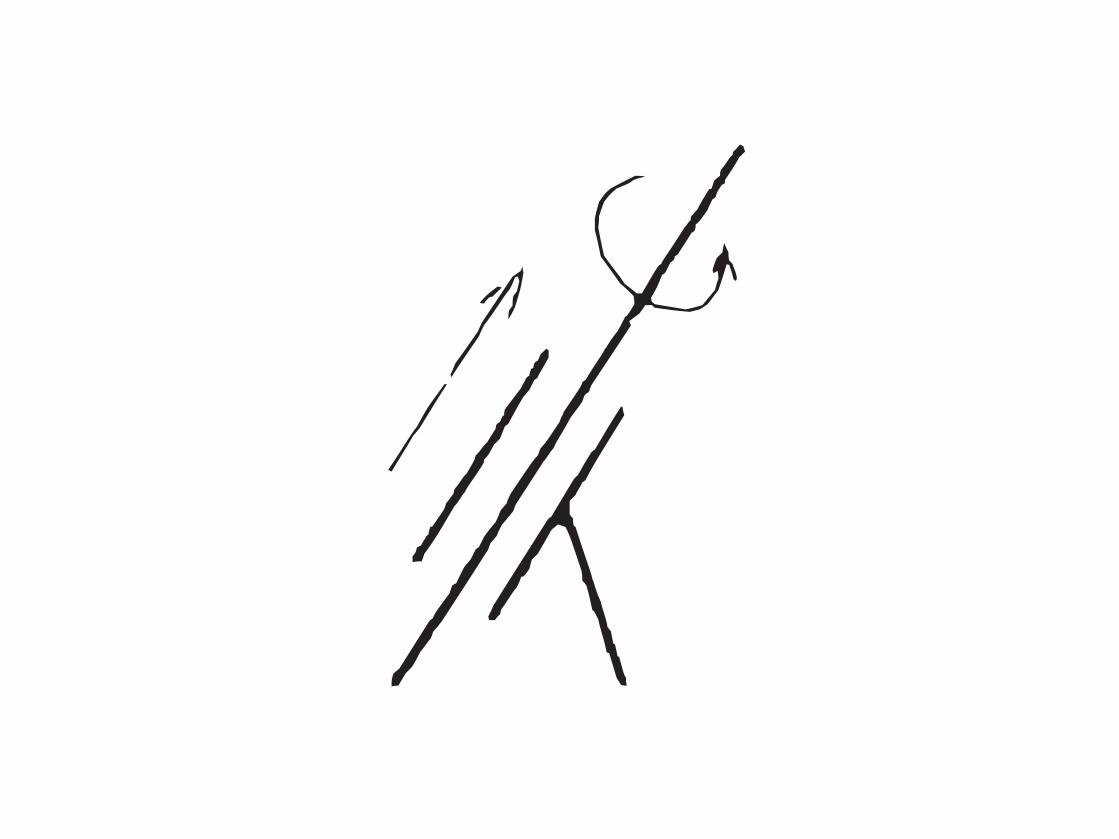
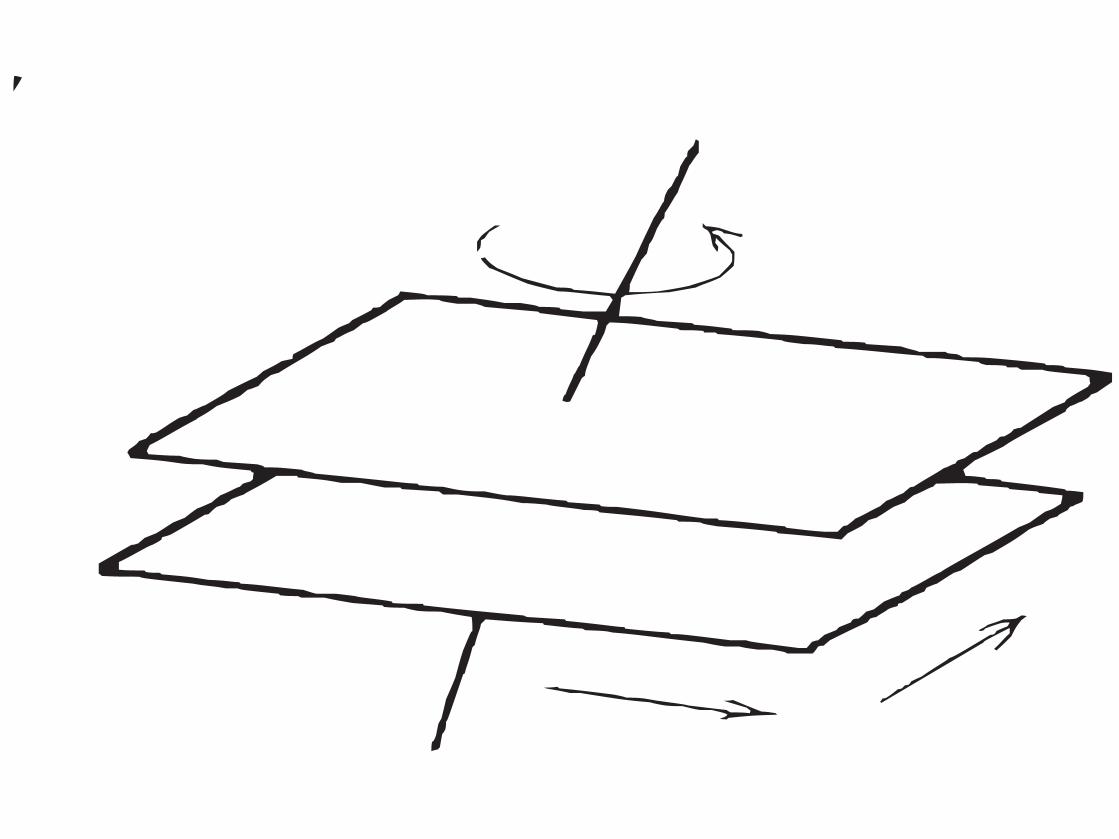
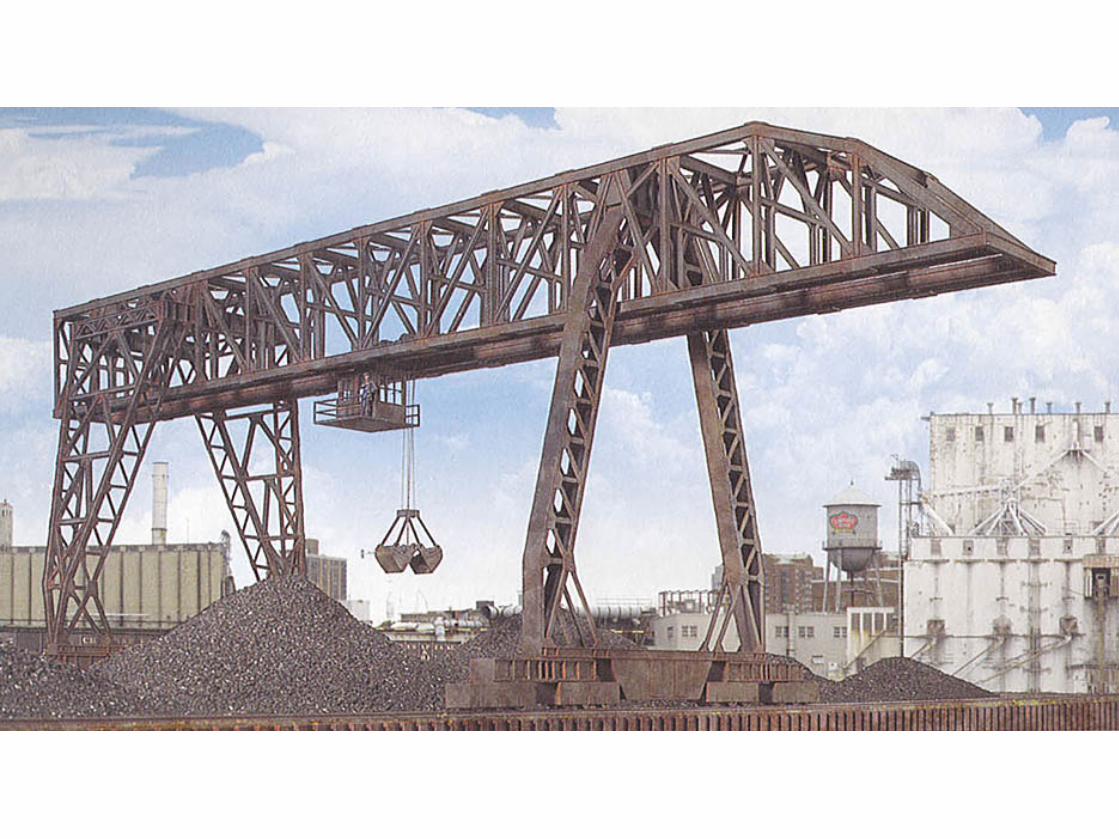
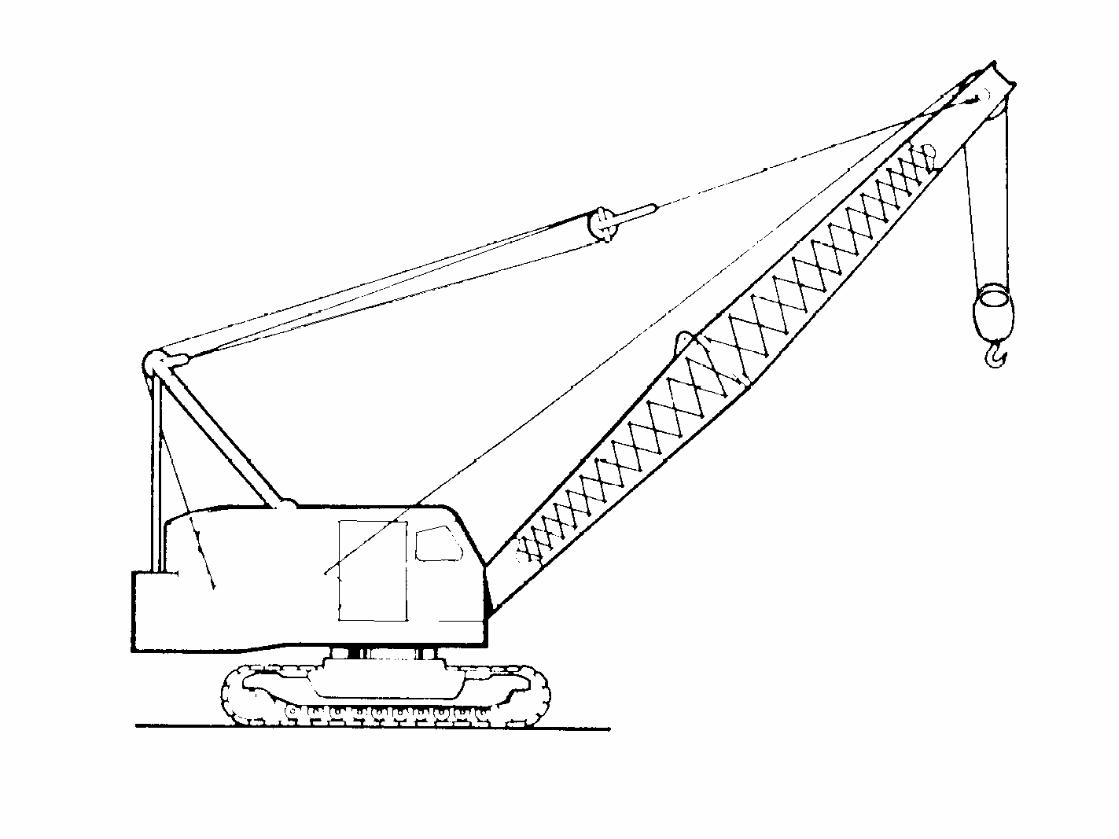
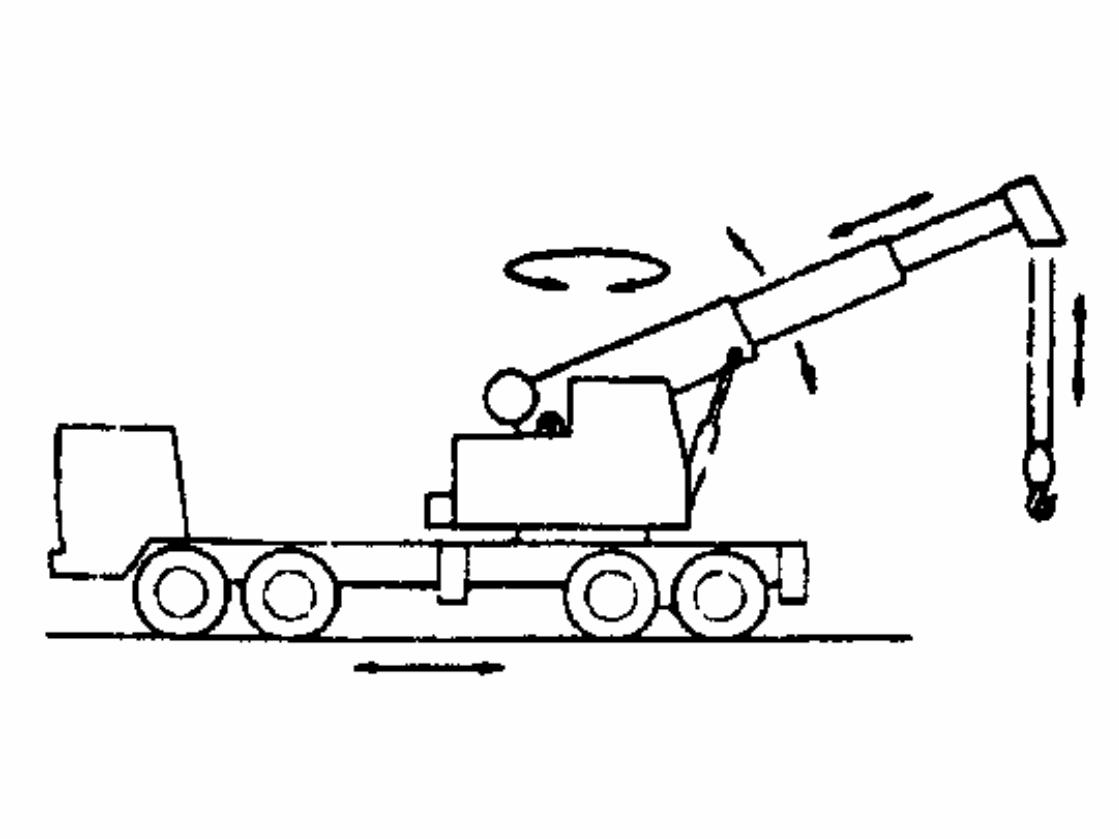
Typicka struktura manipulatoru – jeraby RRP a RRPP
1 2
3 4
5 6
7 8
9 10
11 12
13 14
15 16
17 18
19 20
21 22
23 24
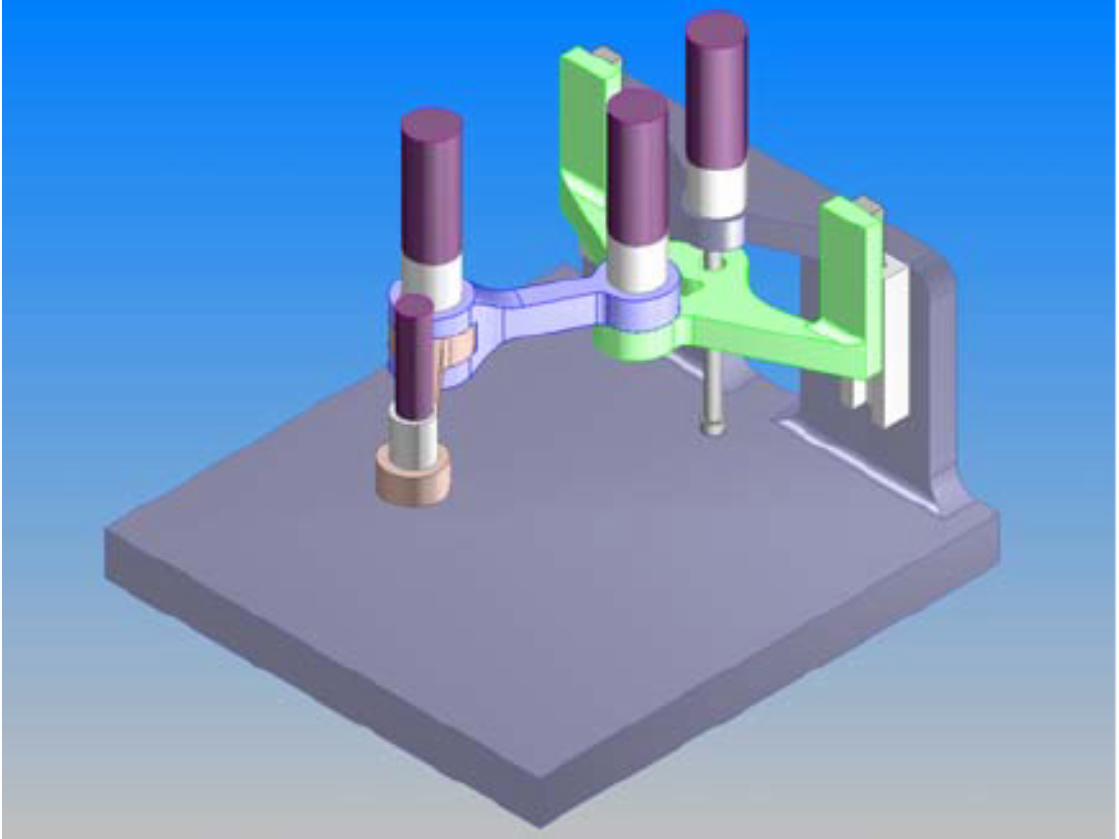
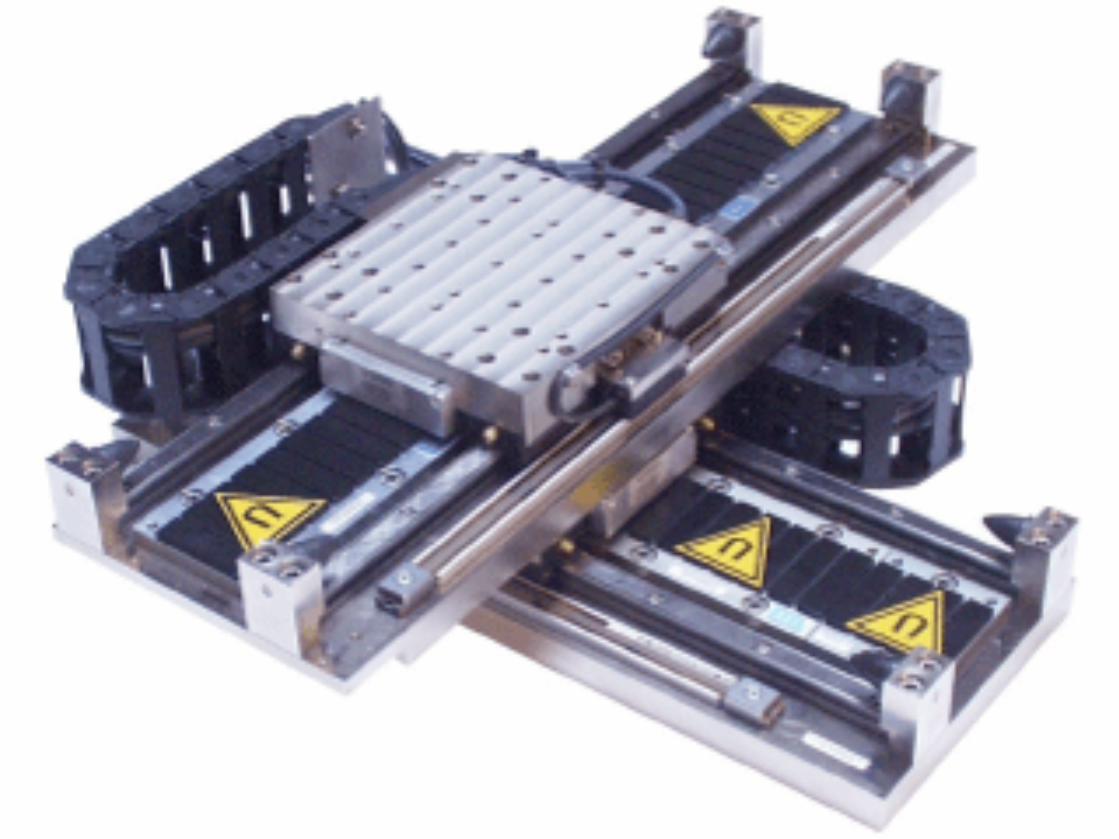
Typicka struktura manipulatoru – SCARA – RRRP
Animace prevzaty z webu Masuda Salimianiho
1 2
3 4
5 6
7 8
9 10
11 12
13 14
15 16
17 18
19 20
21 22
23 24
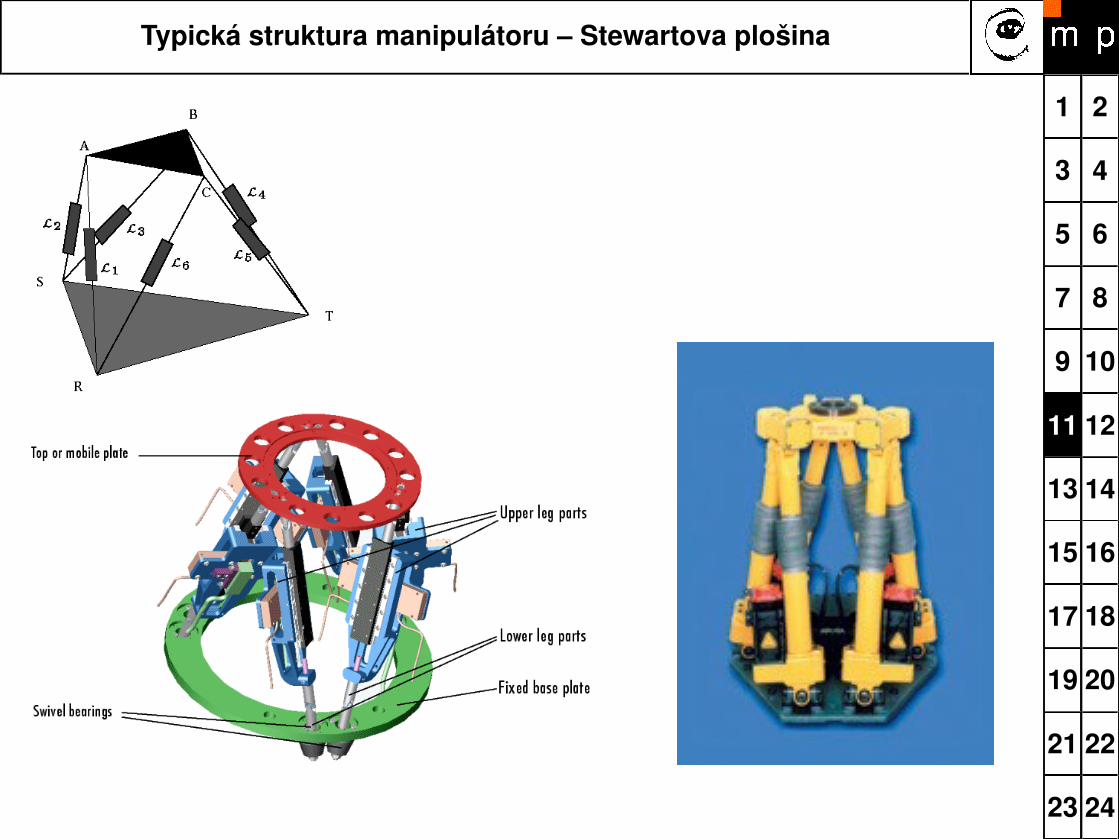
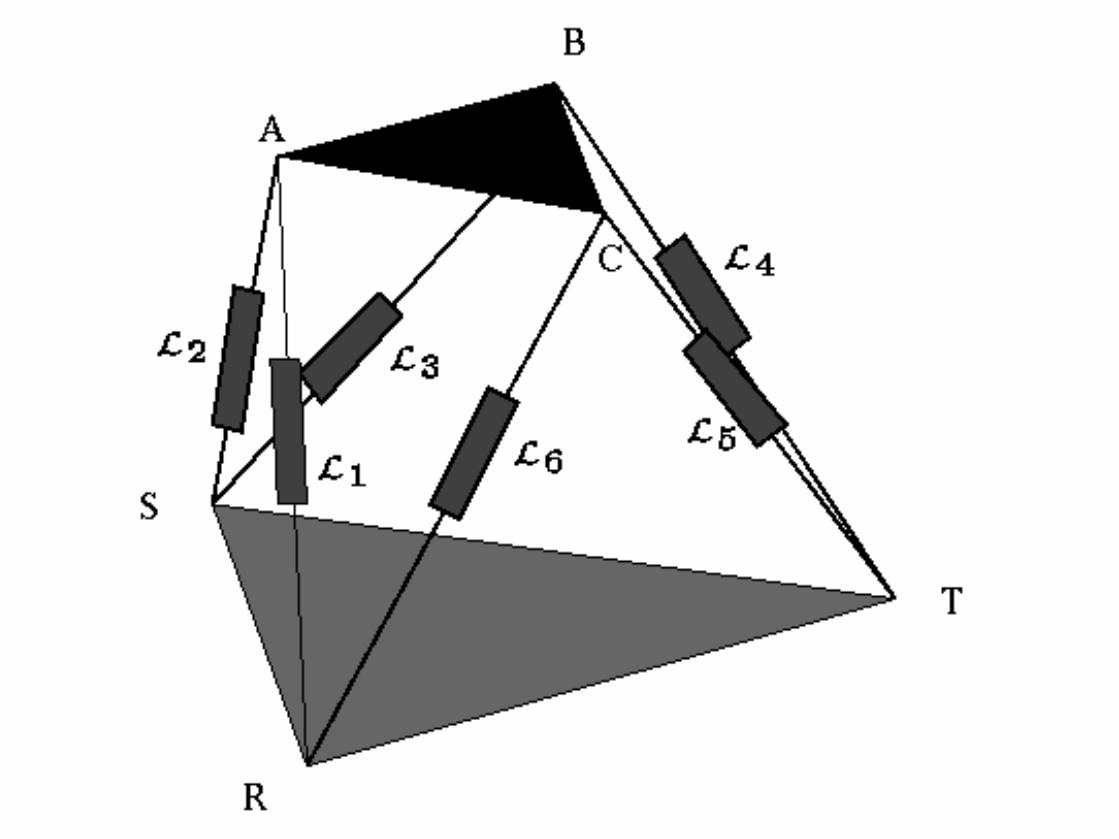
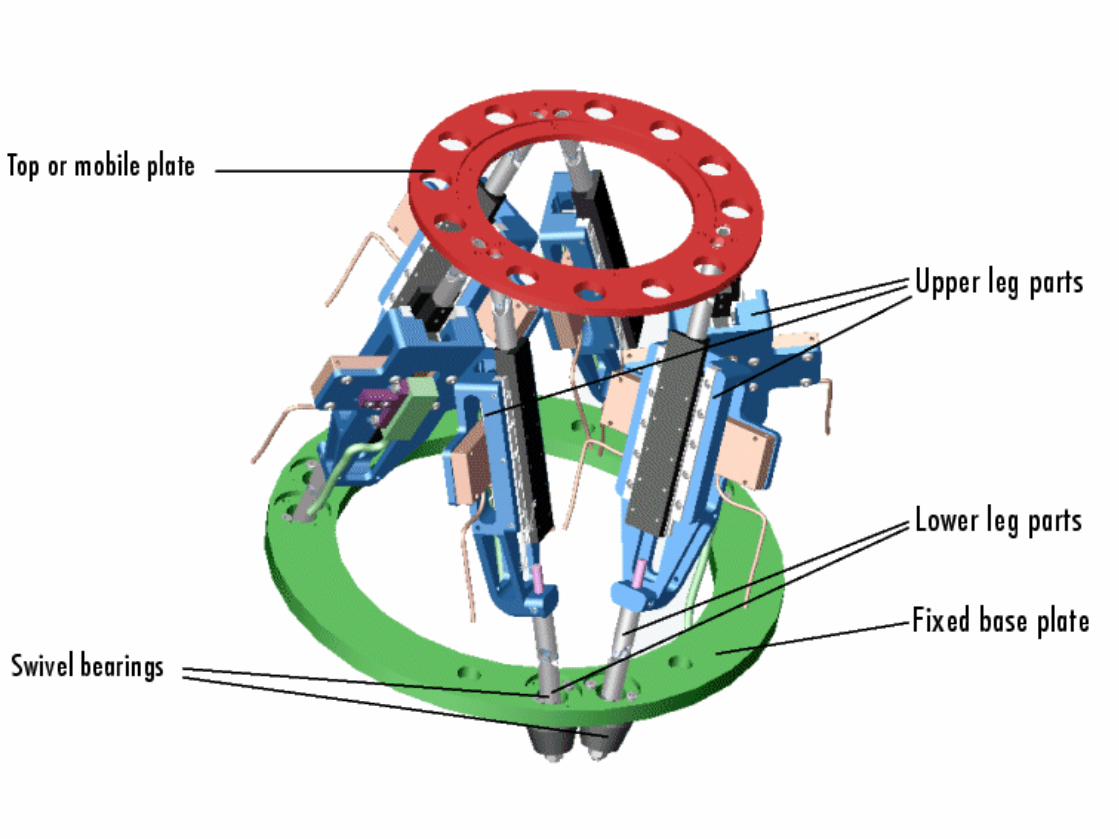
Typicka struktura manipulatoru – Stewartova plosina
1 2
3 4
5 6
7 8
9 10
11 12
13 14
15 16
17 18
19 20
21 22
23 24
Pohony v automatizaci
Typy pohonu:
elektricke,
pneumaticke,
hydraulicke.
1 2
3 4
5 6
7 8
9 10
11 12
13 14
15 16
17 18
19 20
21 22
23 24
Elektricke pohony
Typy elektrickych motoru:
Krokove +snadno se rıdı (nekolik ON/OFF spınacu),
+ nepotrebujı snımac polohy (nekdy),
- mensı sıla, vetsı rozmery,
- trhavy chod,
Stejnosmerne + snadno se rıdı na polohu (PWM),
+ miniaturizovatelne,
+ velky vykon pri malych rozmerech,
+ vysoka dynamika, velky moment,
- vyssı cena,
- mensı spolehlivost (komutator),
1 2
3 4
5 6
7 8
9 10
11 12
13 14
15 16
17 18
19 20
21 22
23 24
Elektricke pohony
Synchronnı motory bez komutatoru + velka spolehlivost,
- komplikovanejsı rızenı (casem prestane s rozvojem elektroniky),
Asynchronnı s kotvou nakratko + levne,
+ spolehlive,
+ velke vykony,
+ relativne snadno se rıdı na rychlost (frekvencnı menice),
- zatım se neumı prumyslove rıdit na polohu (v laboratori uz ano),
1 2
3 4
5 6
7 8
9 10
11 12
13 14
15 16
17 18
19 20
21 22
23 24
Hydraulicke pohony
Vyhody hydraulickych pohonu:
pouzitelne ve vybusnem prostredı,
velka dosazitelna sıla versus velikost,
Nevyhody hydraulickych pohonu:
drahe,
unik oleje,
nutny kompresor, vratne vedenı,
1 2
3 4
5 6
7 8
9 10
11 12
13 14
15 16
17 18
19 20
21 22
23 24
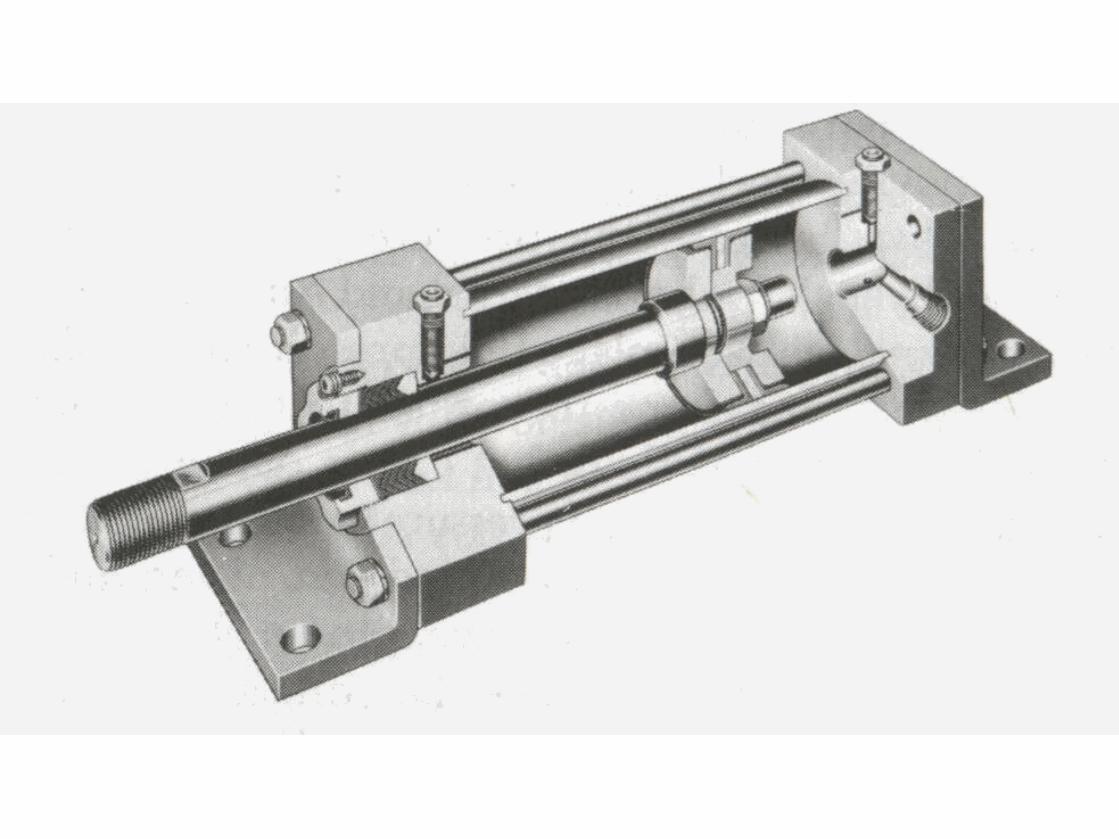
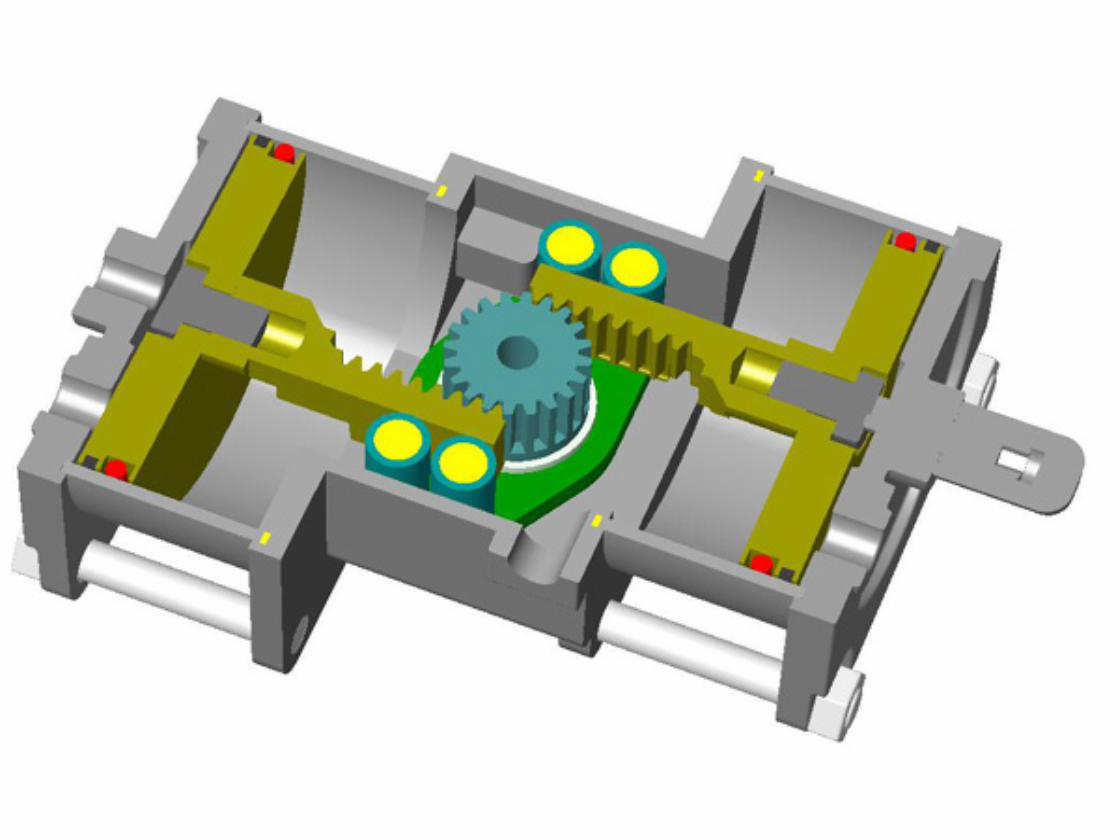
Pneumaticke pohony
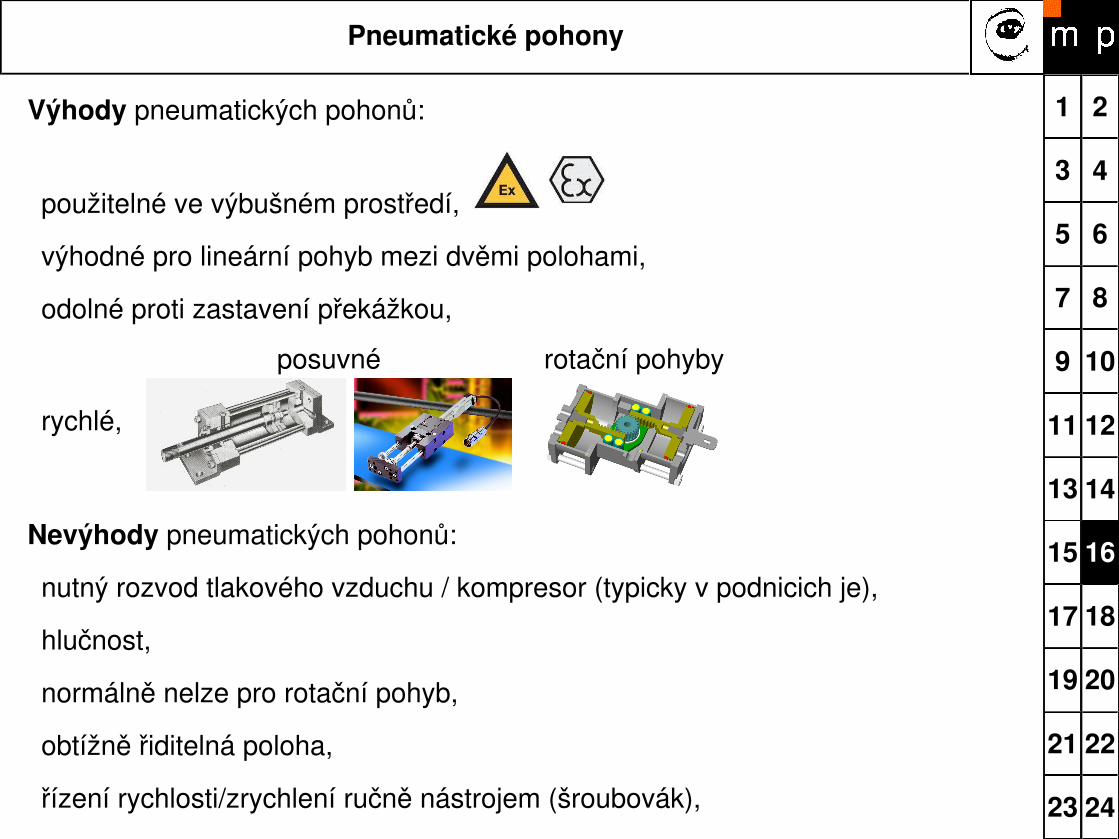
Vyhody pneumatickych pohonu:
pouzitelne ve vybusnem prostredı,
vyhodne pro linearnı pohyb mezi dvemi polohami,
odolne proti zastavenı prekazkou,
rychle,
posuvne rotacnı pohyby
Nevyhody pneumatickych pohonu:
nutny rozvod tlakoveho vzduchu / kompresor (typicky v podnicich je),
hlucnost,
normalne nelze pro rotacnı pohyb,
obtızne riditelna poloha,
rızenı rychlosti/zrychlenı rucne nastrojem (sroubovak),
1 2
3 4
5 6
7 8
9 10
11 12
13 14
15 16
17 18
19 20
21 22
23 24
Jak vybırat pohony:
vybusne prostredı — pneumatika, hydraulika,
velka sıla — hydraulika,
rychle posuvy do krajnıch poloh — pneumatika,
rotacnı, rychlostnı regulace, vykon od cca 50 W — asynchronnı s kotvounakratko,
rotacnı, maly vykon, velka dynamika — stejnosmerny,
rotacnı, mensı vykon, velka dynamika, vysoka spolehlivost — bezkartacovy(synchronnı, permanentnı magnet,...)
maly vykon, maly moment, nızka cena — krokovy,
1 2
3 4
5 6
7 8
9 10
11 12
13 14
15 16
17 18
19 20
21 22
23 24
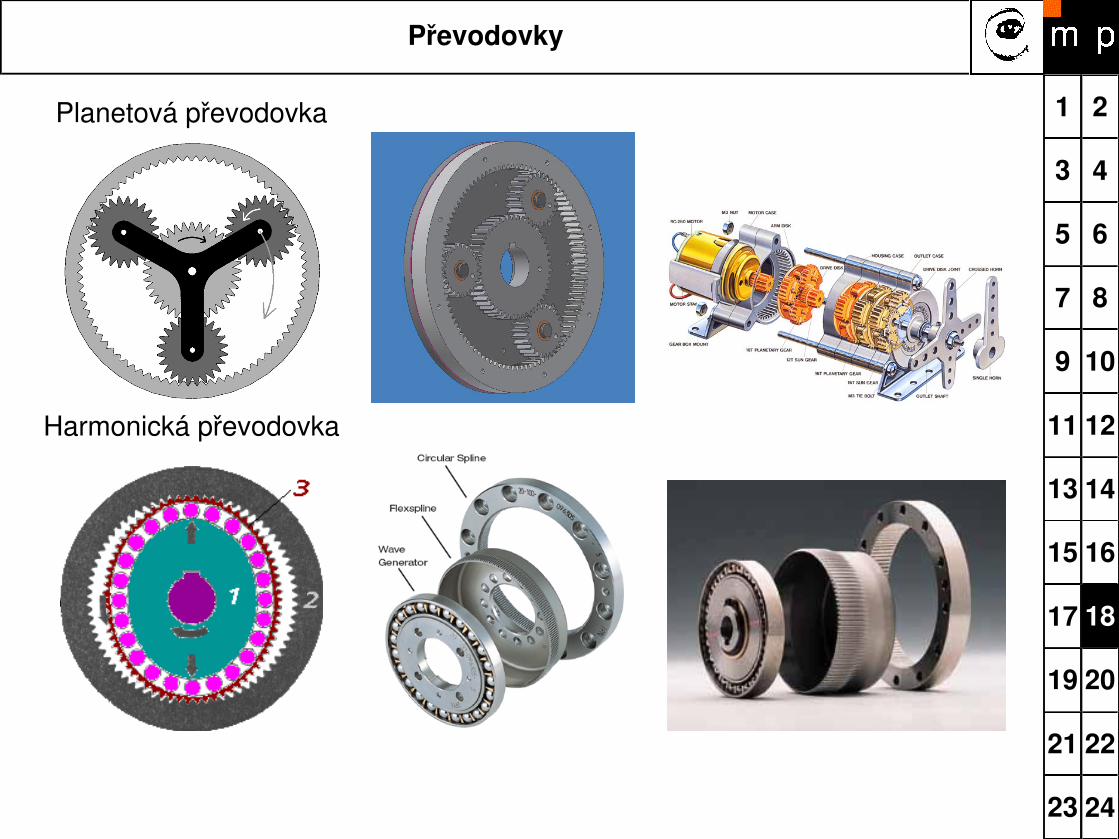
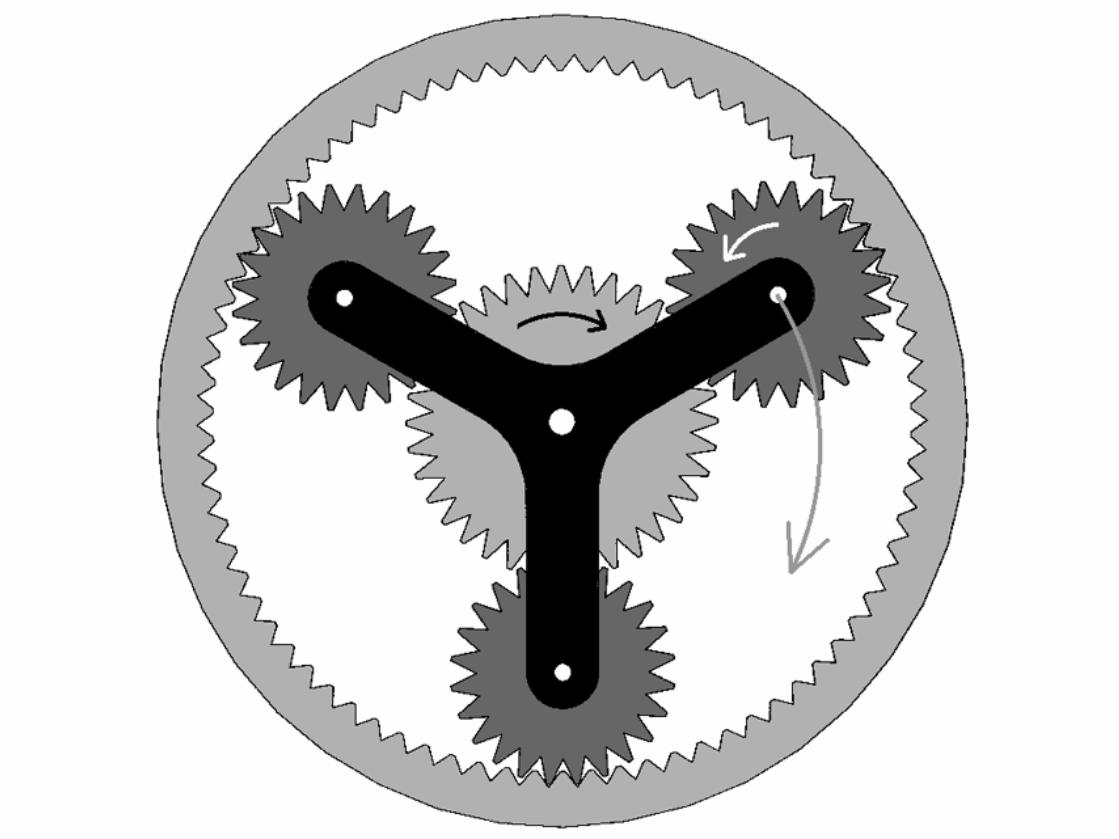
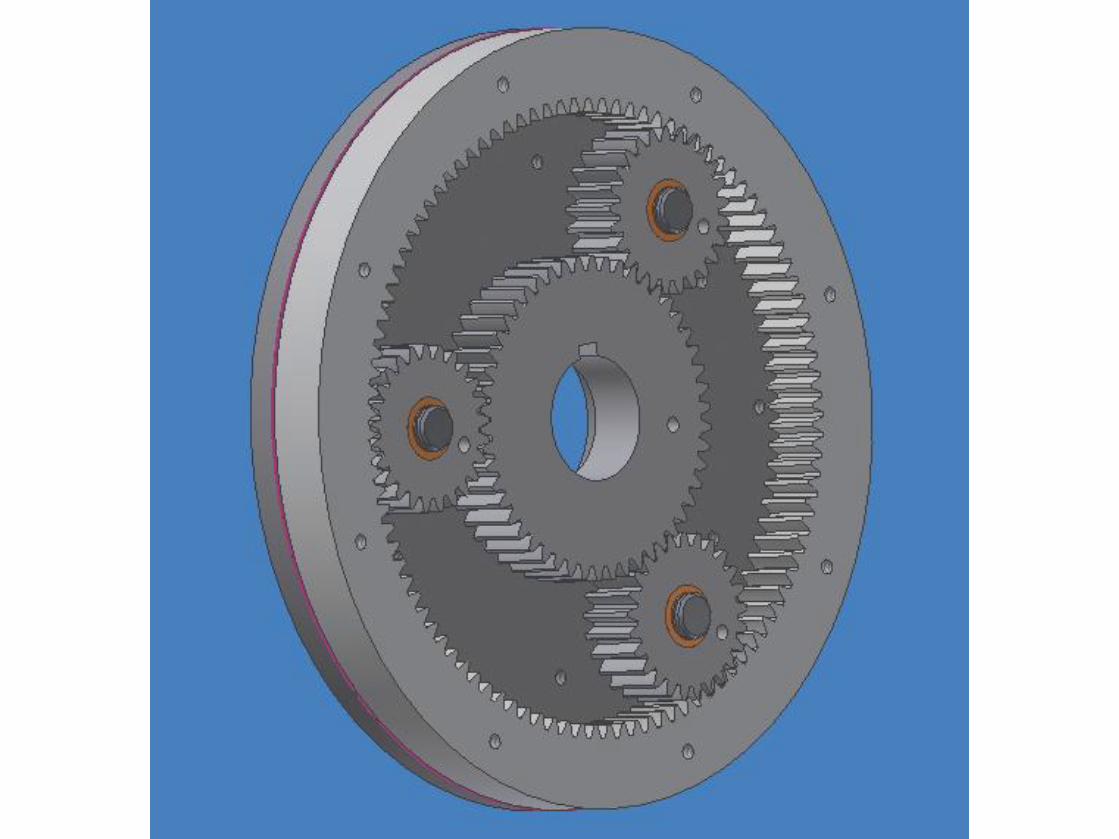
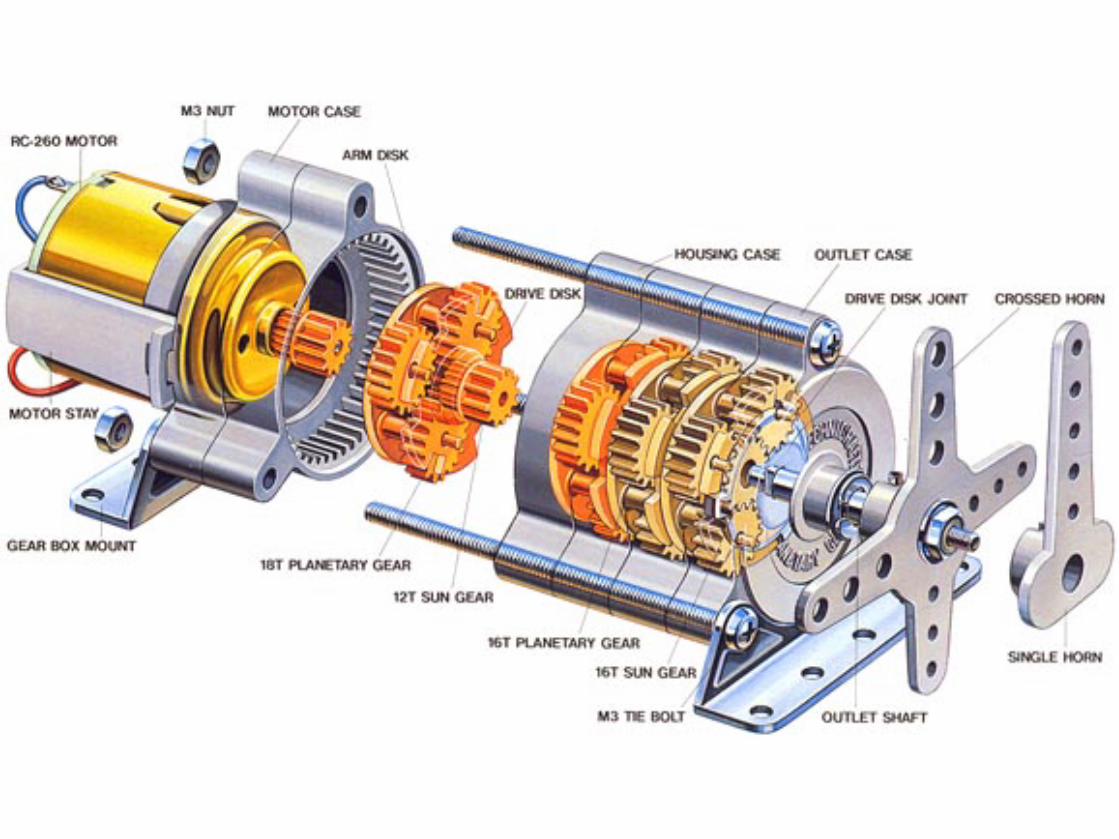
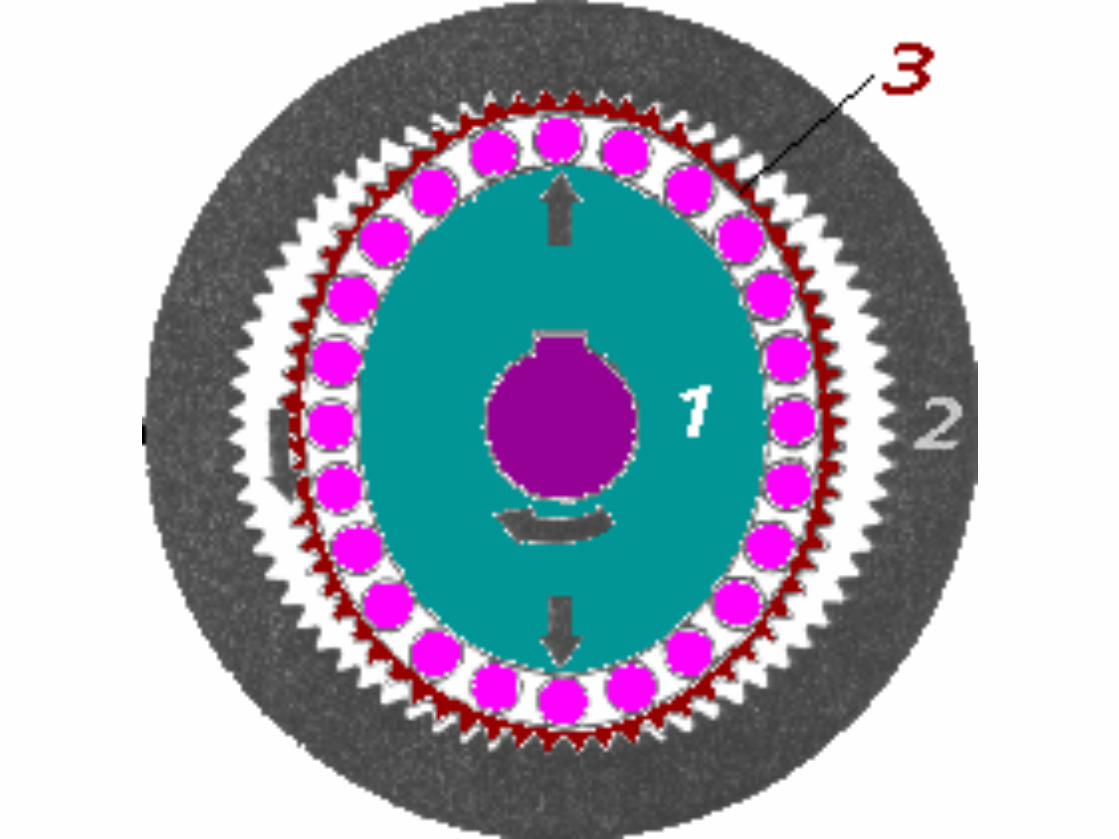
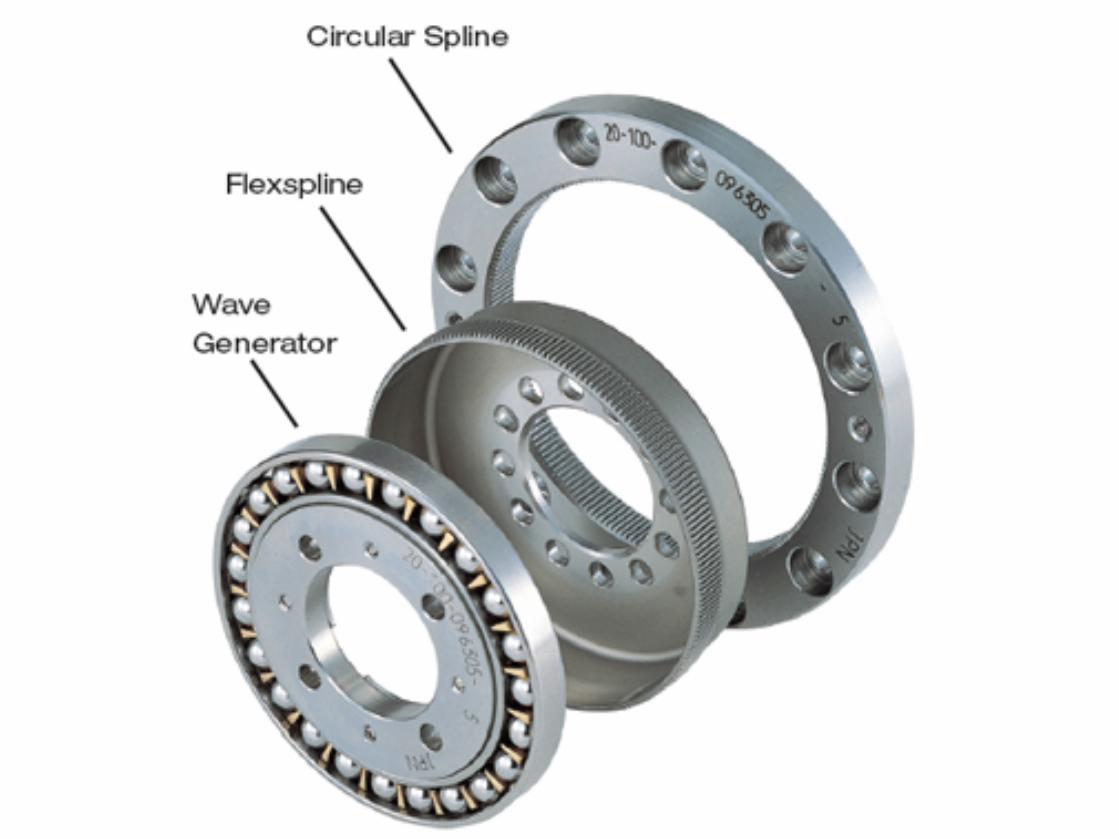
Prevodovky
Planetova prevodovka
Harmonicka prevodovka
1 2
3 4
5 6
7 8
9 10
11 12
13 14
15 16
17 18
19 20
21 22
23 24
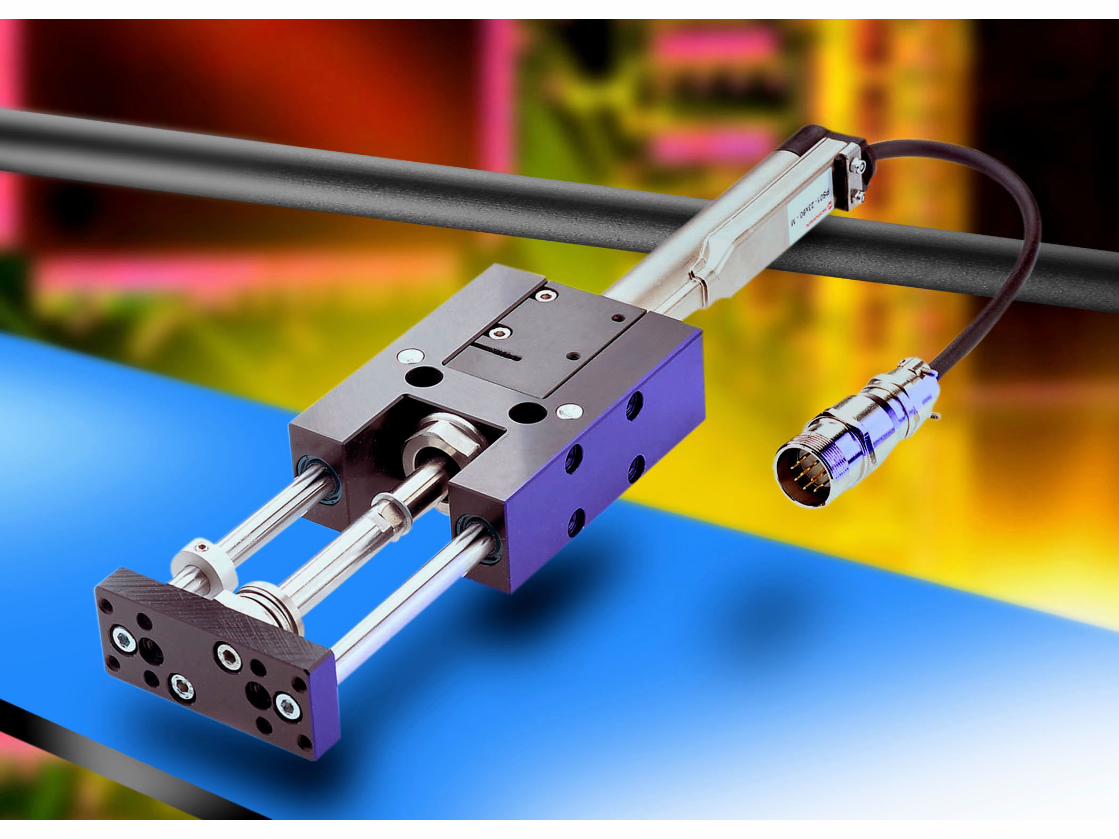
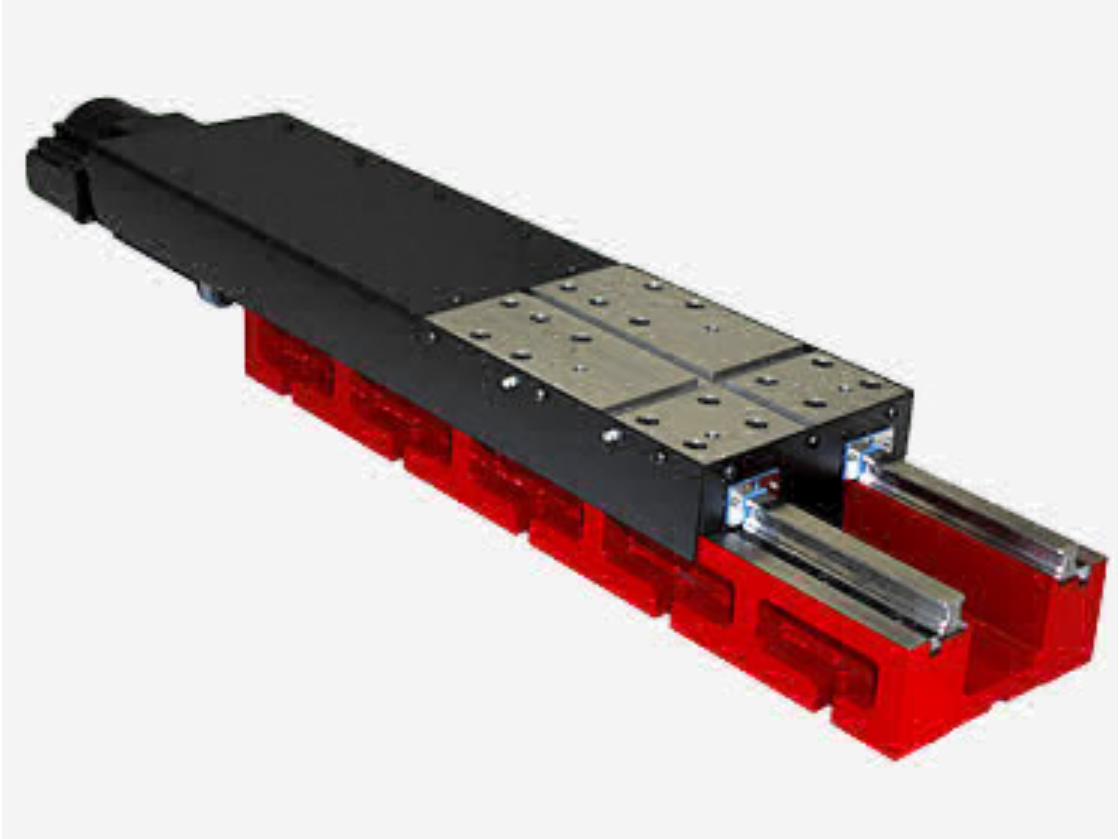
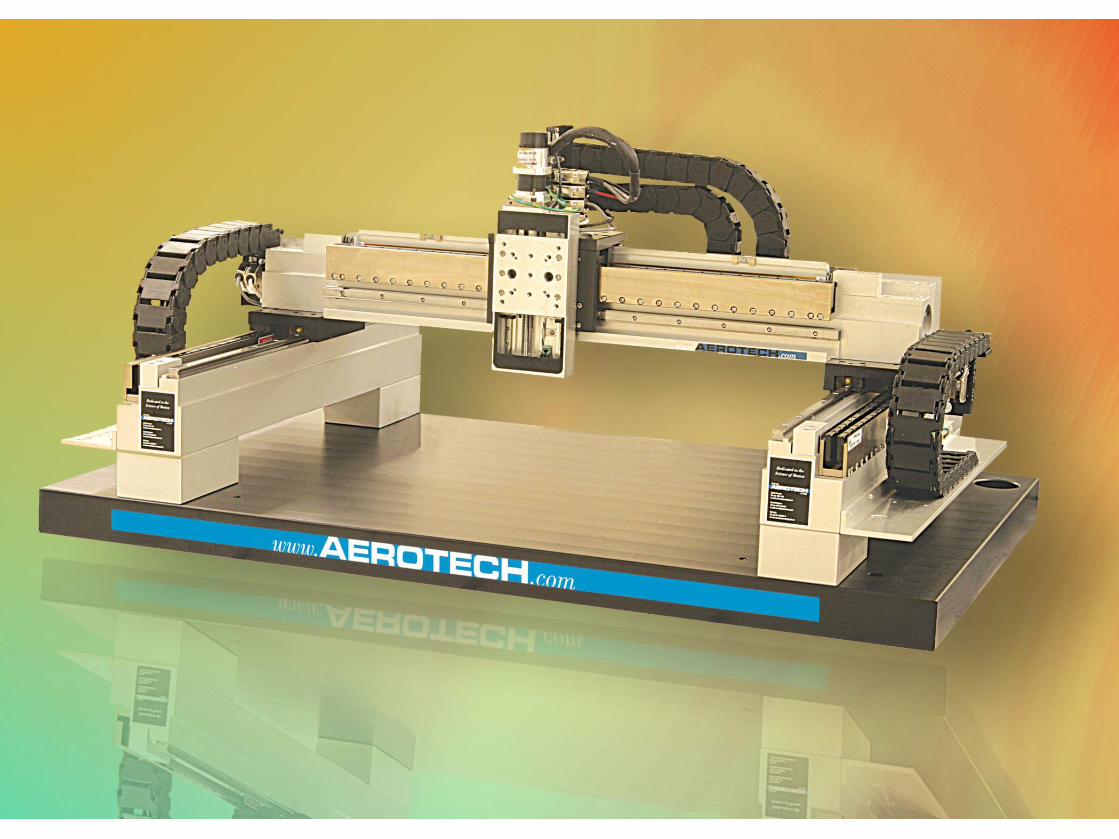
Prevodovky a vedenı
Kulickovy sroub
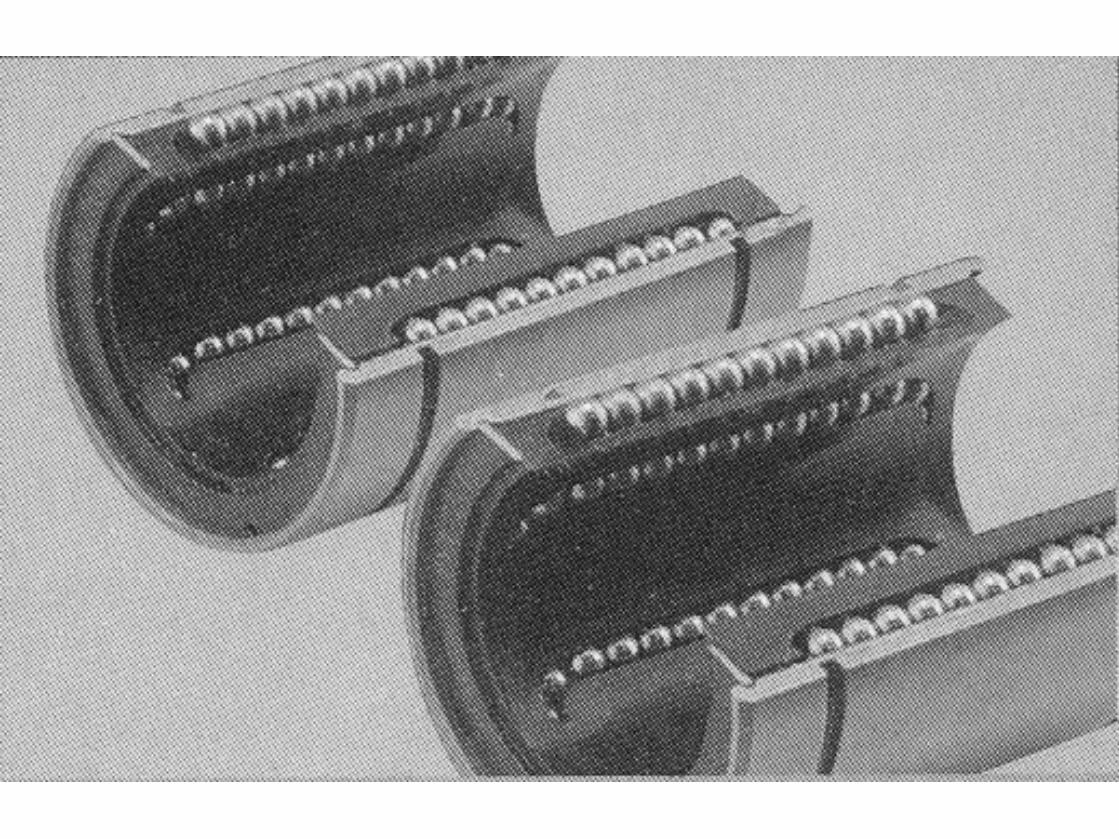
Linearnı vedenı
1 2
3 4
5 6
7 8
9 10
11 12
13 14
15 16
17 18
19 20
21 22
23 24
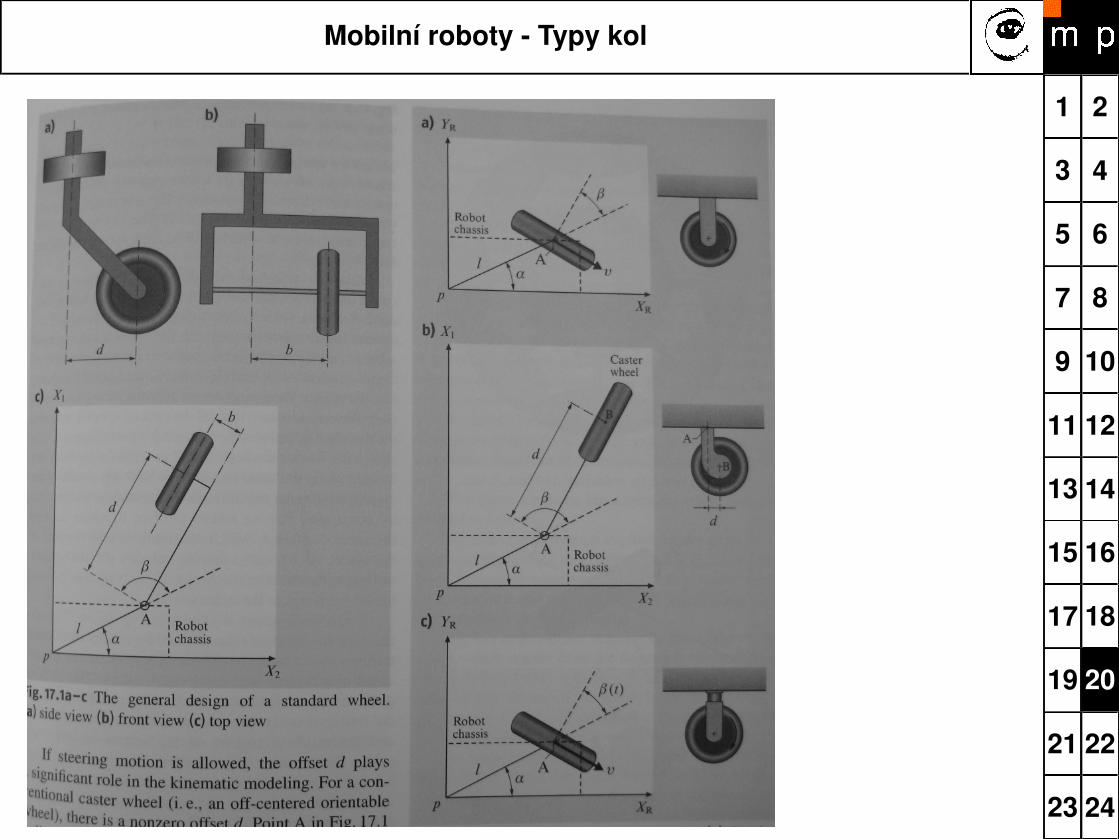
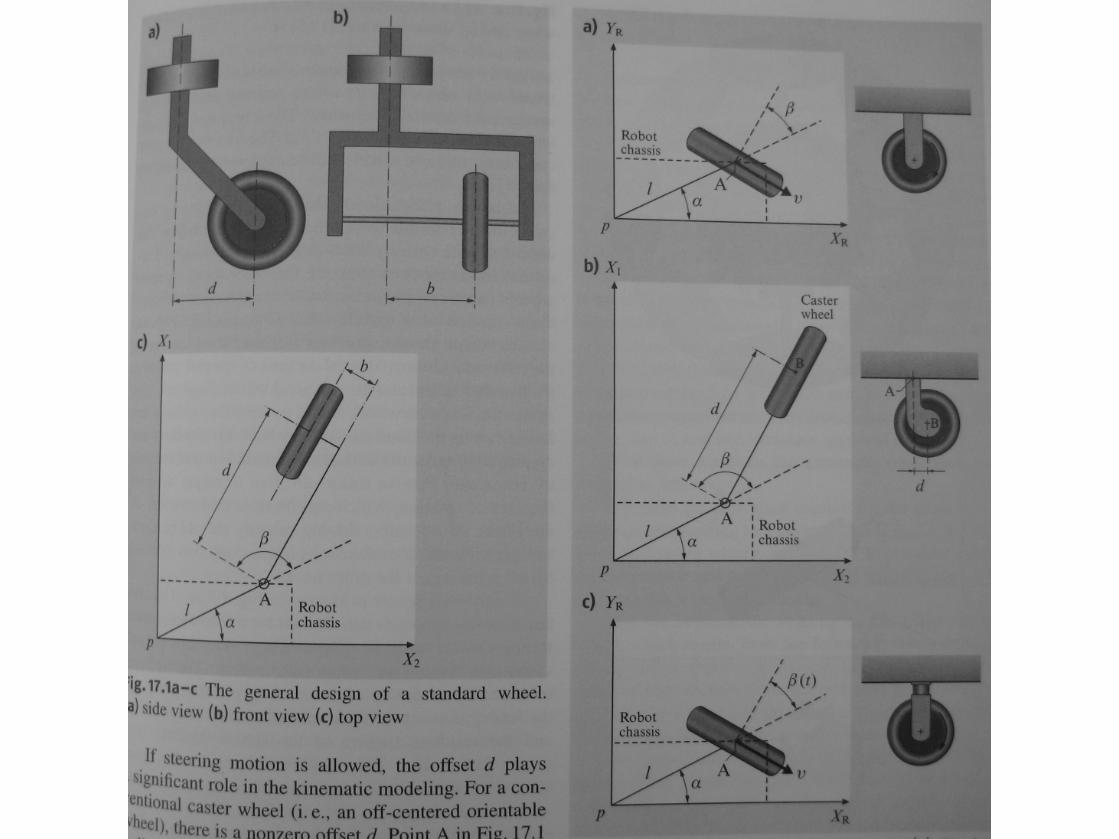
Mobilnı roboty - Typy kol
1 2
3 4
5 6
7 8
9 10
11 12
13 14
15 16
17 18
19 20
21 22
23 24
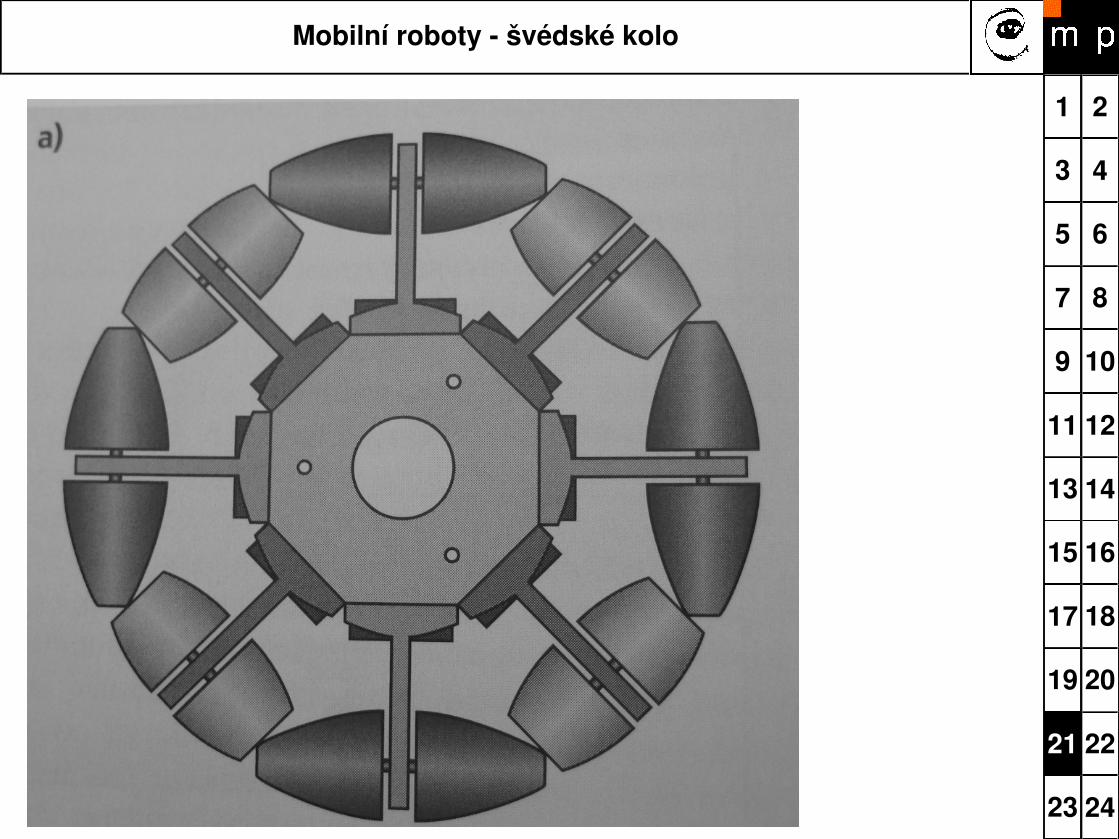
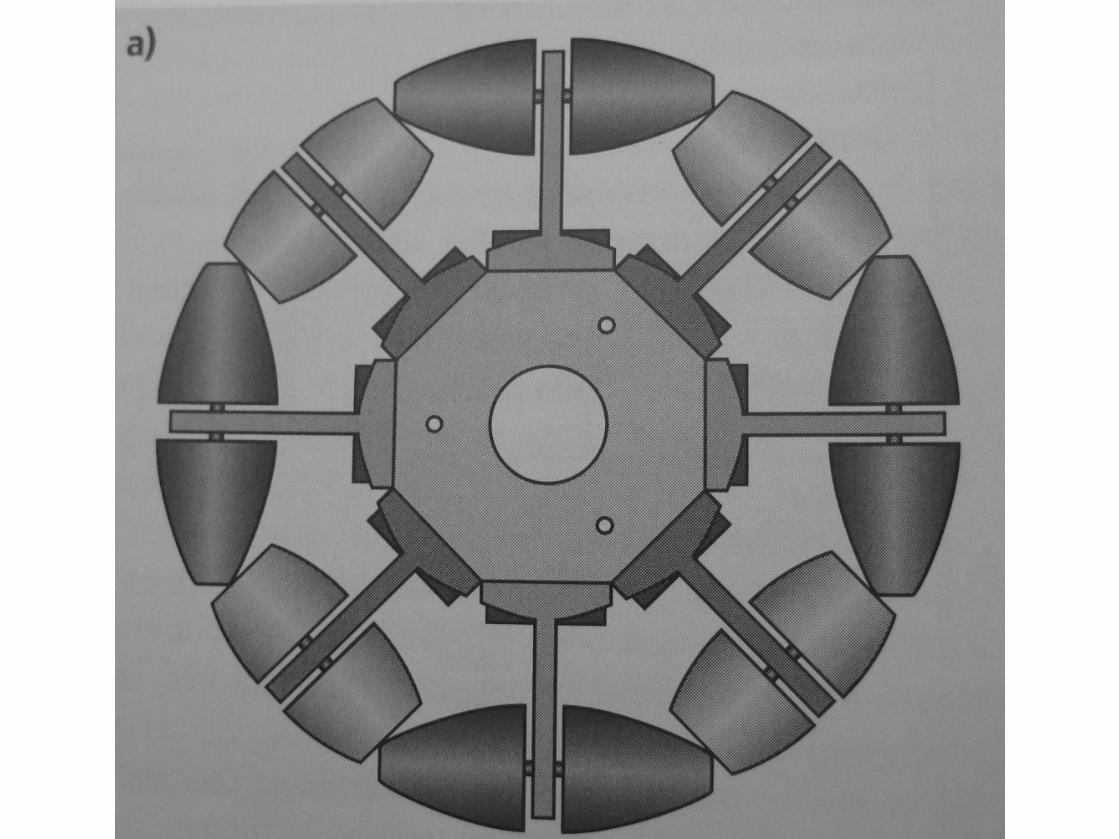
Mobilnı roboty - svedske kolo
1 2
3 4
5 6
7 8
9 10
11 12
13 14
15 16
17 18
19 20
21 22
23 24
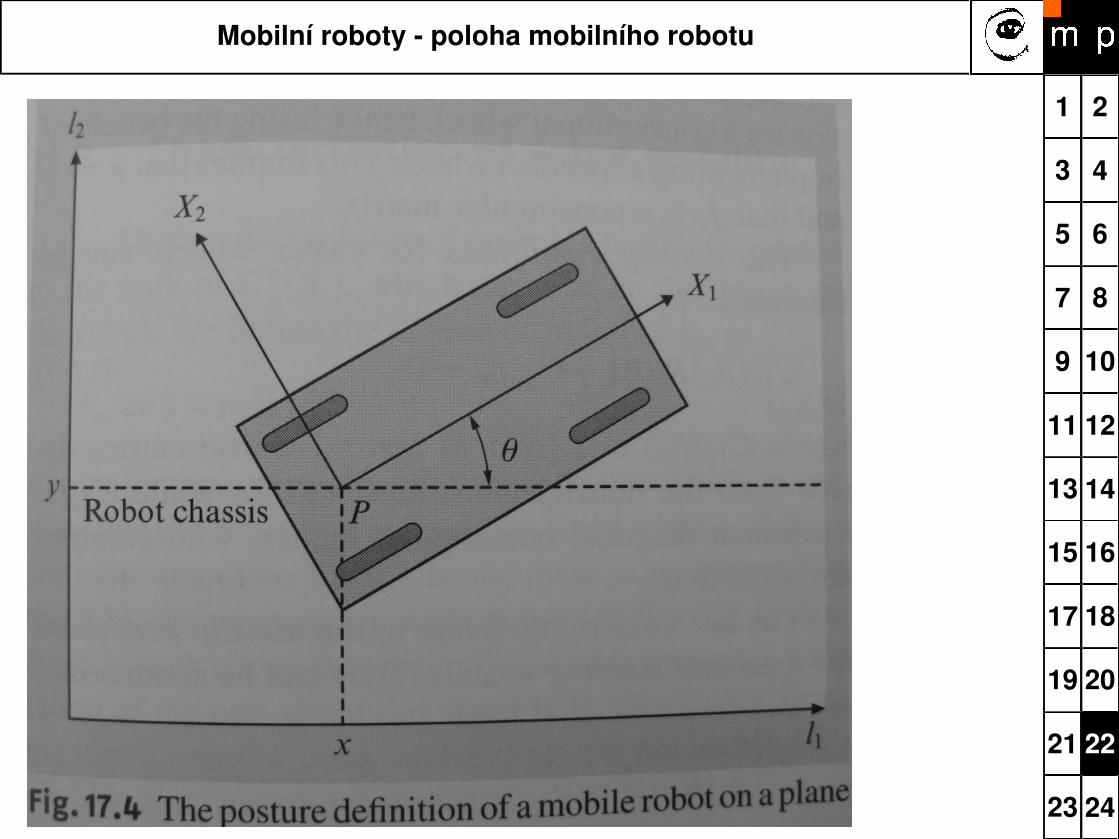
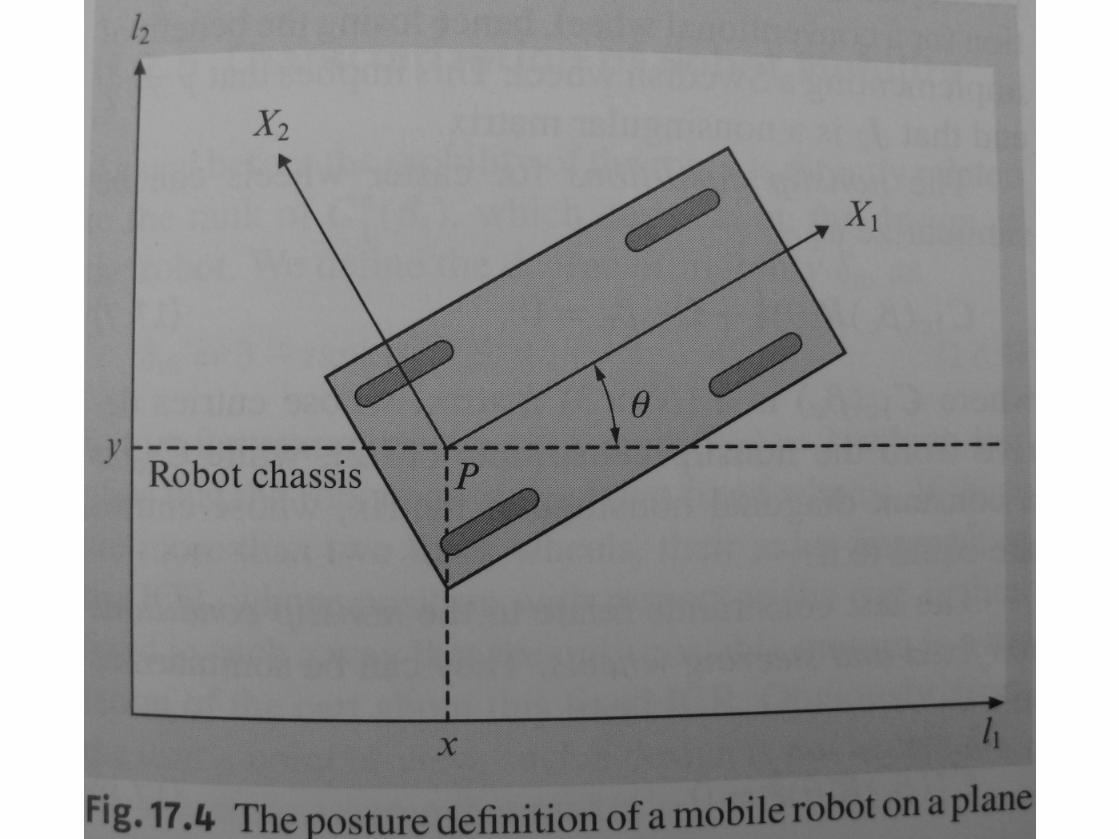
Mobilnı roboty - poloha mobilnıho robotu
1 2
3 4
5 6
7 8
9 10
11 12
13 14
15 16
17 18
19 20
21 22
23 24
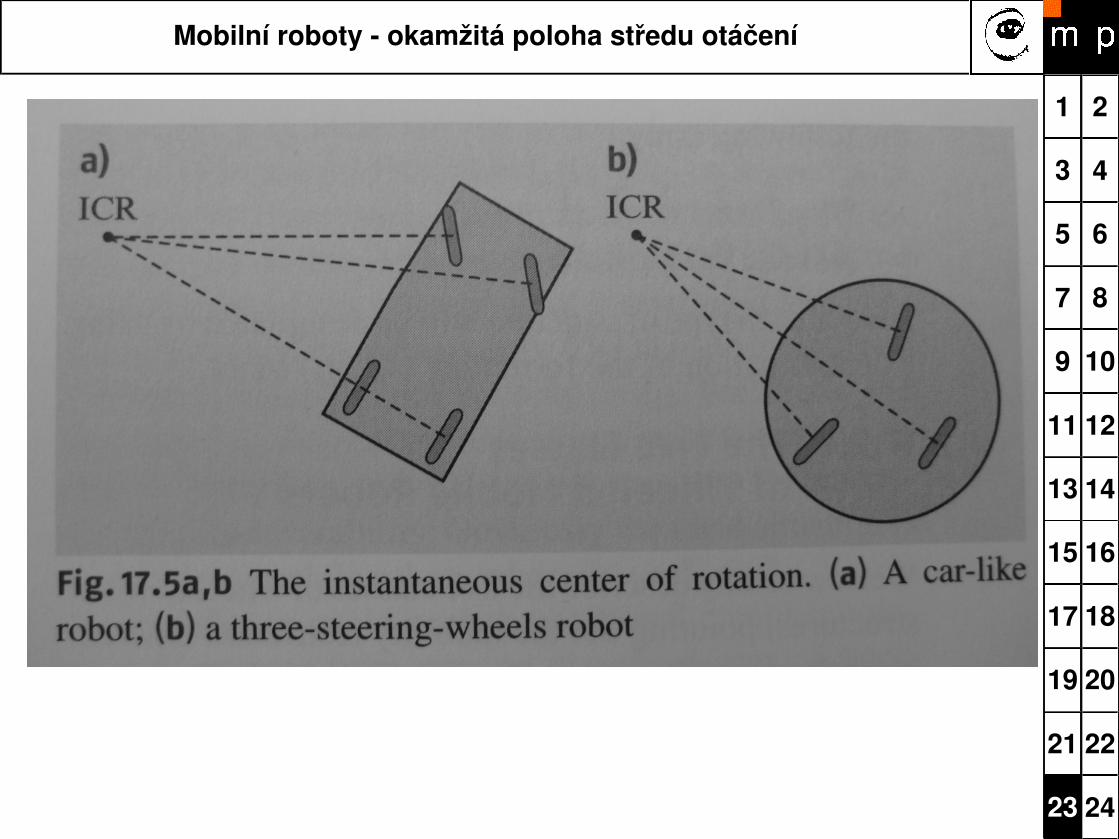
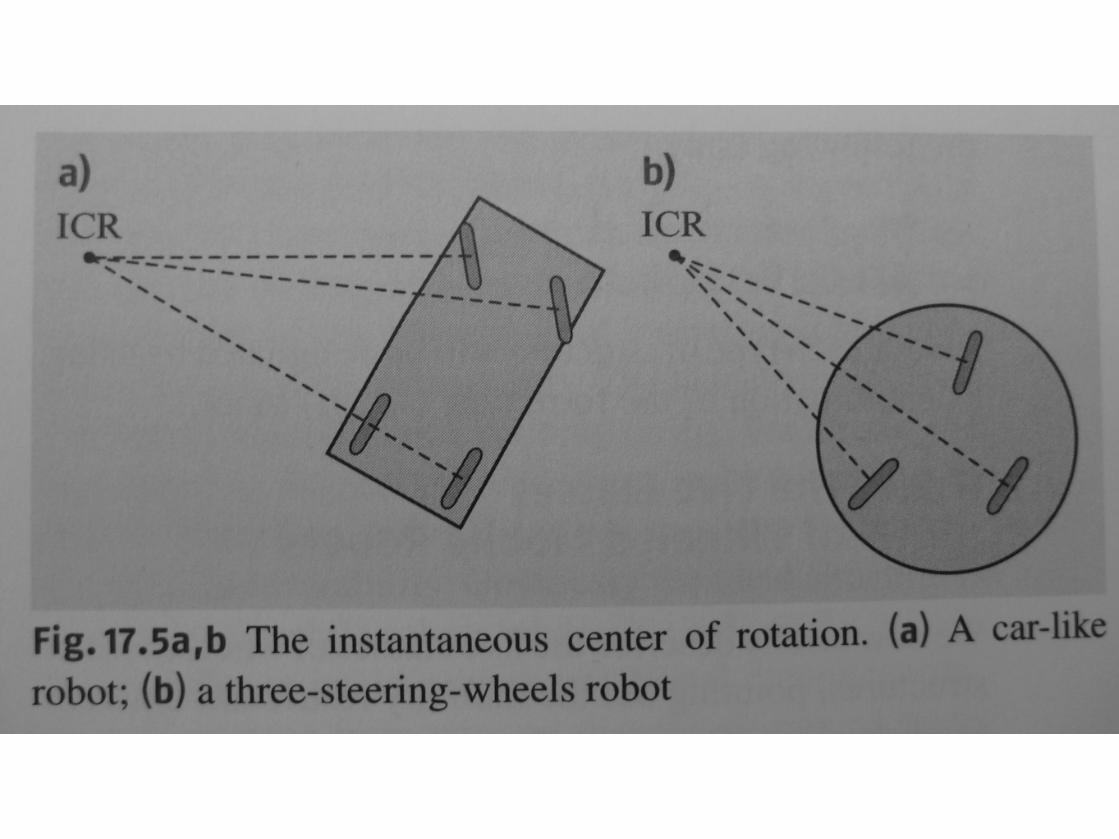
Mobilnı roboty - okamzita poloha stredu otacenı
1 2
3 4
5 6
7 8
9 10
11 12
13 14
15 16
17 18
19 20
21 22
23 24
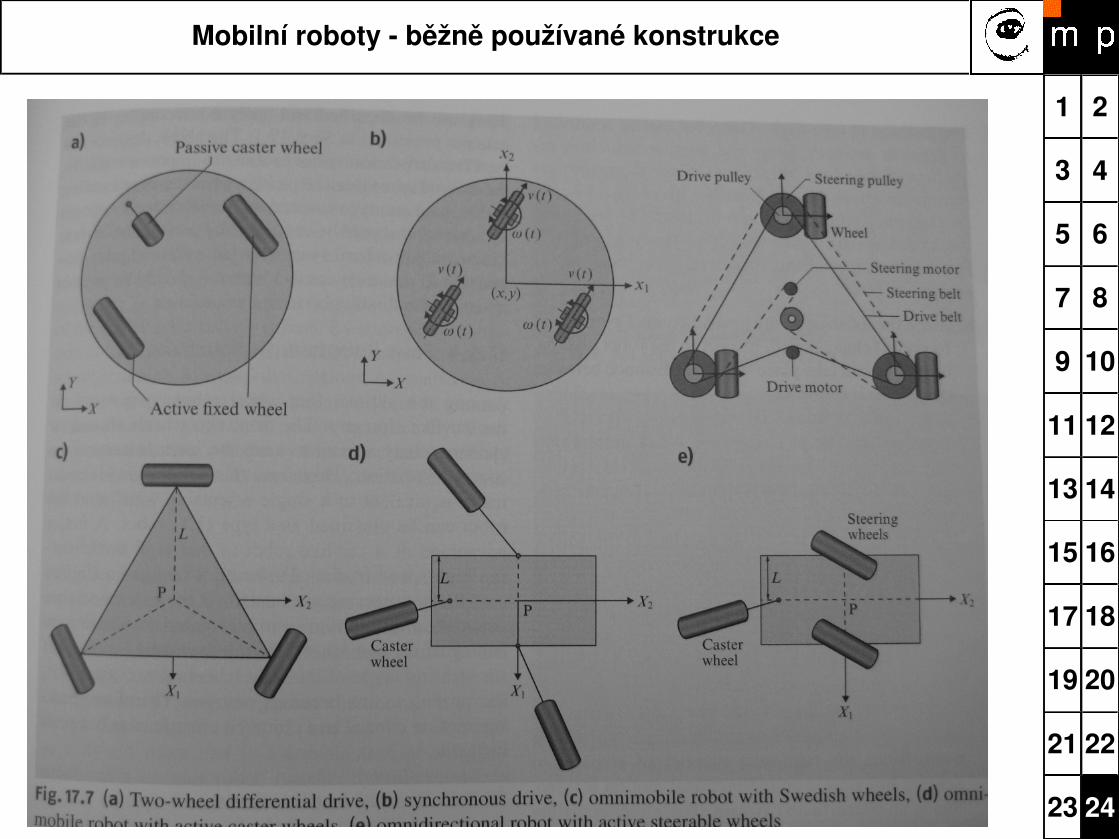
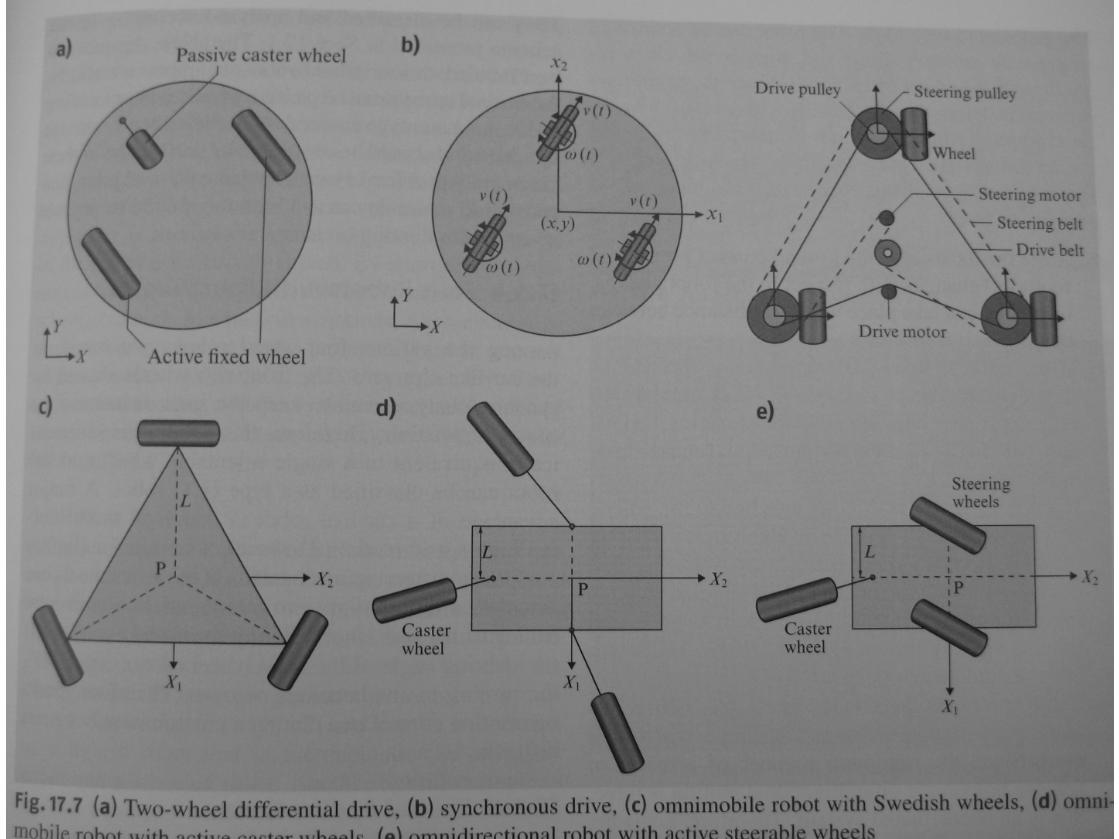
Mobilnı roboty - bezne pouzıvane konstrukce
1 2
3 4
5 6
7 8
9 10
11 12
13 14
15 16
17 18
19 20
21 22
23 24
J5 axisJ4 axis
Fore armElbow block
J3 axis
Upper arm
J2 axis
Base
J1 axis
Shoulder
J6 axis