25
Průmyslové kooperace FORWISSu Vybrané příklady
Průmyslové kooperace
FORWISSu
Vybrané příklady
FORWISS
Základní data
Založení: 1988 jako první bavorské výzkumné sdružení s degresivním podpůrným financováním
Právní forma do konce roku 2000 Institut tří univerzit
• Erlangen-Nürnberg, Passau, TU München [Technická Univerzita]
Od 2001 do 2004 • Výzkumná organizace Univerzity Pasov
• Bez státní finanční podpory
Od 2005 • Institut pro softwarové systémy pro technické využití
informatiky (FORWISS Passau)
Vedoucí institutu od 01. 06. 2012: Prof. Dr. Tomas Sauer
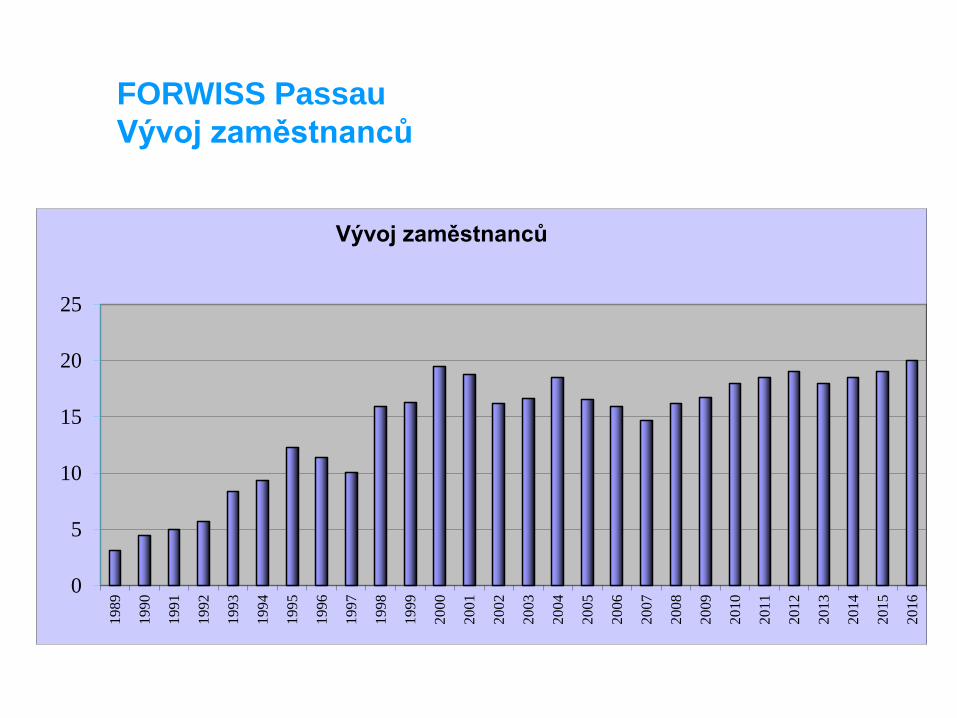
FORWISS Passau
Vývoj zaměstnanců
0
5
10
15
20
25
1989
1990
1991
1992
1993
1994
1995
1996
1997
1998
1999
2000
2001
2002
2003
2004
2005
2006
2007
2008
2009
2010
2011
2012
2013
2014
2015
2016
Vývoj zaměstnanců
FORWISS Passau
Oblasti činnosti
Digitální zpracování obrazu a signálu
• Všeobecně – Segmentace obrazu
– Prototype Matching
– Rozpoznání vzorů
– Multisensorální vyhodnocení
– Využití v reálném čase
• Technika optického měření
– Kamerová kalibrace
– Stereo měření
– Měření se subpixelovou přesností
• Fúze sensorových dat
• Deflektometrie s řízenou změnou fáze
FORWISS Passau
Oblasti činnosti
Systémy CAD: vývoj softwarů pro
• zpracování dat pro aditivní výrobní proces
• ovládání 3D-tiskáren
• modelace povrchů a recirkulace v systémech CAD
• metody kompenzace deformace
Aplikovaná matematika (Prof. Sauer)
• řízení CNC obráběcích strojů
• zpracování biosignálů
• geometrický design ozubených kol
• geometrické zpracování dat
• segmentace dat z průmyslové počítačové tomografie
FORWISS Passau
Projekty zpracování obrazu a signálů
Aktuální projekty
• Projekty ve spolupráci s Micro-Epsilon-Messtechnik
• Rozpoznání záměrů cyklistů (DFG)
• Detekce cizích těles a zajištění kvality v rámci kontroly potravin
prostřednictvím rentgenové techniky (IuK mit Mesutronic GmbH)
• FlyFlect3D (Bayerische Forschungsstiftung – Bavorská
výzkumná nadace - s Micro-Epsilon)
• Visit (Interreg Bavorsko-Rakousko)
• Predictive Maintanence a zajištění kvality při zpracování surovin
(IuK s R. Scheuchl GmbH)
• Big Picture (kooperace s Fraunhofer IIS)
• Kooperativní vysoce automatizovaná jízda, Ko-HAF (BMWi)
FORWISS Passau
Projekte v oblasti CAD
Aktuální projekty
• Spolupráce s voxeljet: zpracování dat a nastavení 3D-tiskáren
pro tisk písku
• TFP-HyMat (Interreg Bavorsko-Rakousko)
• Kompenzace deformace (EOS GmbH)
Zpracování obrazu
ANGIO (1992…)
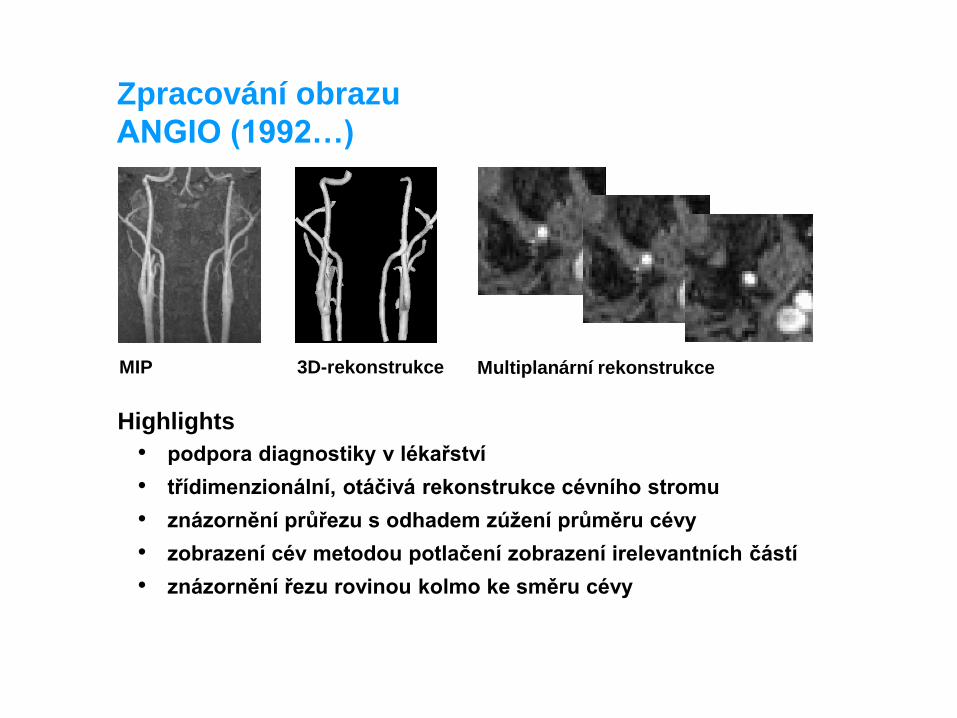
Highlights
• podpora diagnostiky v lékařství
• třídimenzionální, otáčivá rekonstrukce cévního stromu
• znázornění průřezu s odhadem zúžení průměru cévy
• zobrazení cév metodou potlačení zobrazení irelevantních částí
• znázornění řezu rovinou kolmo ke směru cévy
MIP 3D-rekonstrukce Multiplanární rekonstrukce

Zpracování obrazu
PReVENT (2004-2008)
Celková suma projektu: 55 mil. €
Dotace z EU: 29,8 mil. €
51 partnerů:
• 12 OEMs
• 16 dodavatelů
• 23 institutů a.j.
Cíl: Vývoj a demonstrace preventivních bezpečnostních technologií, preventivní
bezpečnostní opatření pomáhající řidiči - dodržet bezpečnou rychlost a vzdálenost,
- zůstat ve svém pruhu,
- vyvarovat se nebezpečným manévrům,
- projet bezpečně křižovatkou,
- vyvarovat se kolizí se zranitelnými účastníky provozu,
- snížit následky nehody.

Zpracování obrazu
IP PReVENT: část projektu COMPOSE
Cíl: Zmírnění následků nehody a ochranné mechanismy pro VRU
Zaměření:
• čelní nárazy
• opatření, která se aktivují v poslední sekundě před nárazem
(a)
(c)
(e)
(d) (b)
a) FIR Camera
b) IBEO Laserscanner
c) Long Range Radar
d) Short Range Radar
e) Video Camera (jen
Display)

Zpracování obrazu
IP PReVENT: Exhibice
Zpracování obrazu
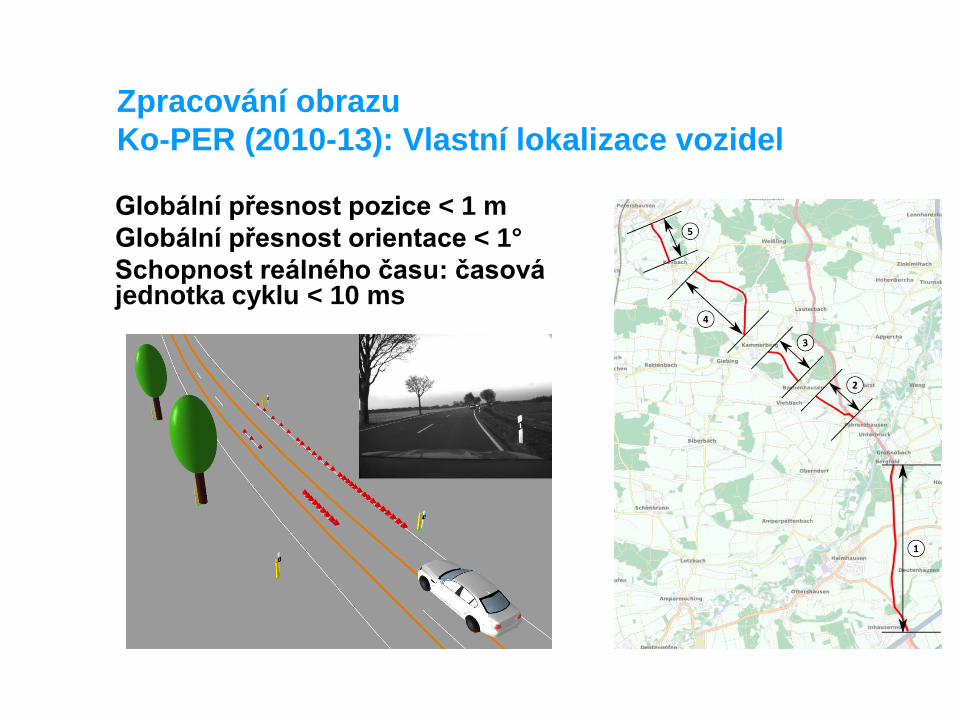
Ko-PER (2010-13): Vlastní lokalizace vozidel
Globální přesnost pozice < 1 m
Globální přesnost orientace < 1°
Schopnost reálného času: časová jednotka cyklu < 10 ms

Zpracování obrazu
interactIVe (2010-13): rozpoznání krajnice
• filtr částic
• DCT
• charakteristické znaky textury
• rozpoznání objektů
• kompenzace značení vozovky

Ko-HAF: projektoví partneři
Výrobci
automobilů Dodavatelé SME
Veřejné
instituce Výzkumné
organizace
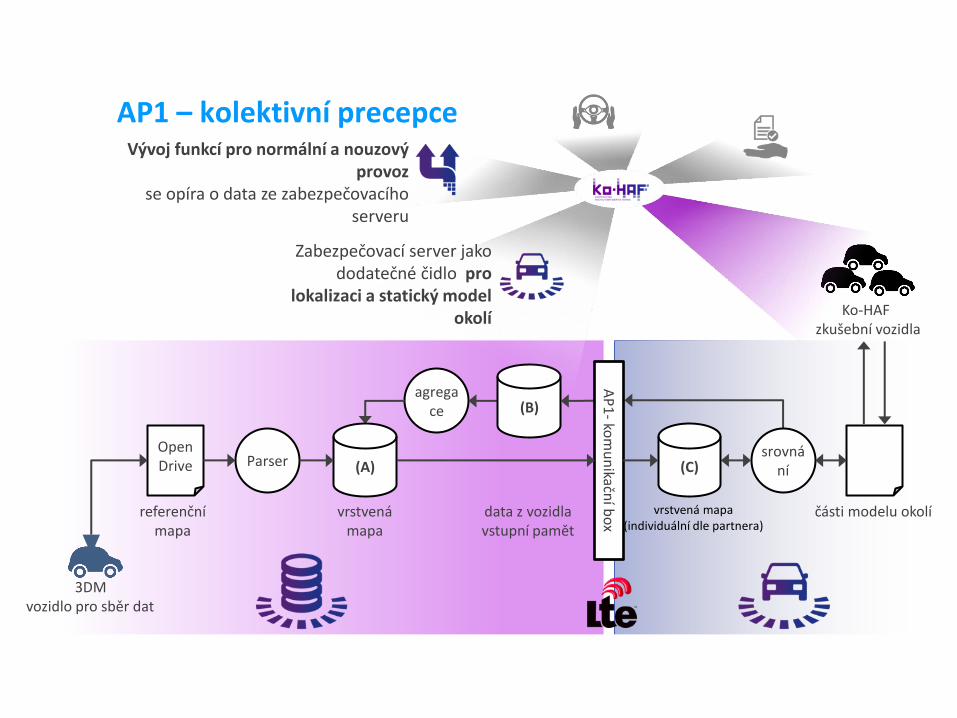
AP1 – kolektivní precepce
agregace (B)
data z vozidla vstupní pamět
OpenDrive
3DM vozidlo pro sběr dat
referenční mapa
části modelu okolí
srovnání
Ko-HAF zkušební vozidla
(A) Parser
vrstvená mapa
(C)
vrstvená mapa (individuální dle partnera)
AP
1- ko
mu
nikačn
í bo
x
Zabezpečovací server jako dodatečné čidlo pro
lokalizaci a statický model okolí
Vývoj funkcí pro normální a nouzový provoz
se opíra o data ze zabezpečovacího serveru

AP1 – dílčí zpráva: testovací oblast
definována a vyměřena
Reference Map XML / OpenDrive Testovací trasa ve Frankfurtu
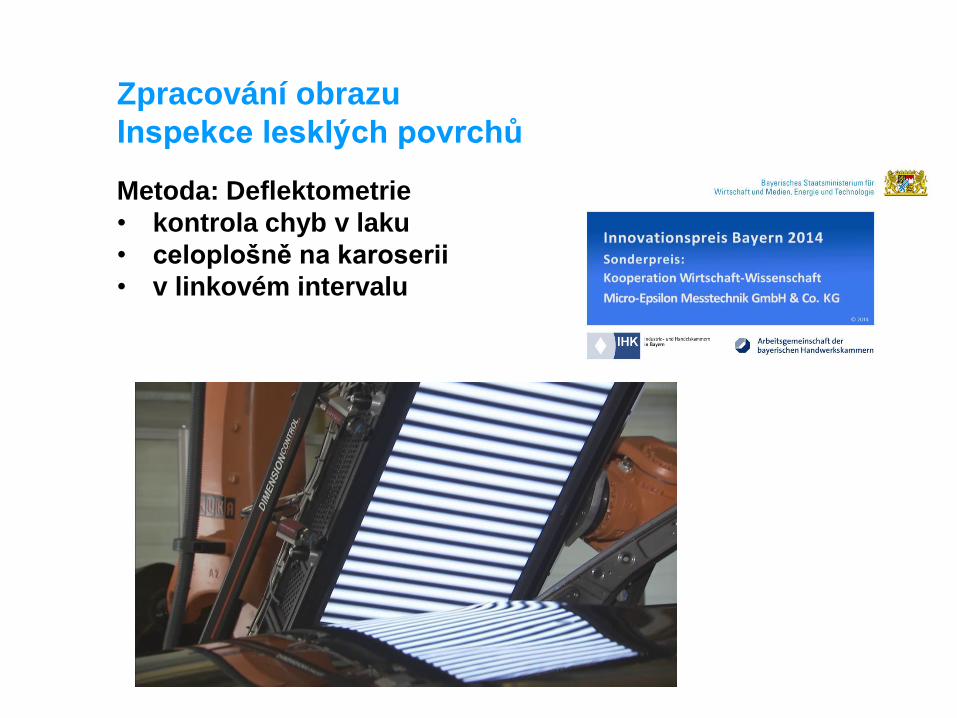
Zpracování obrazu
Inspekce lesklých povrchů
Metoda: Deflektometrie
• kontrola chyb v laku
• celoplošně na karoserii
• v linkovém intervalu
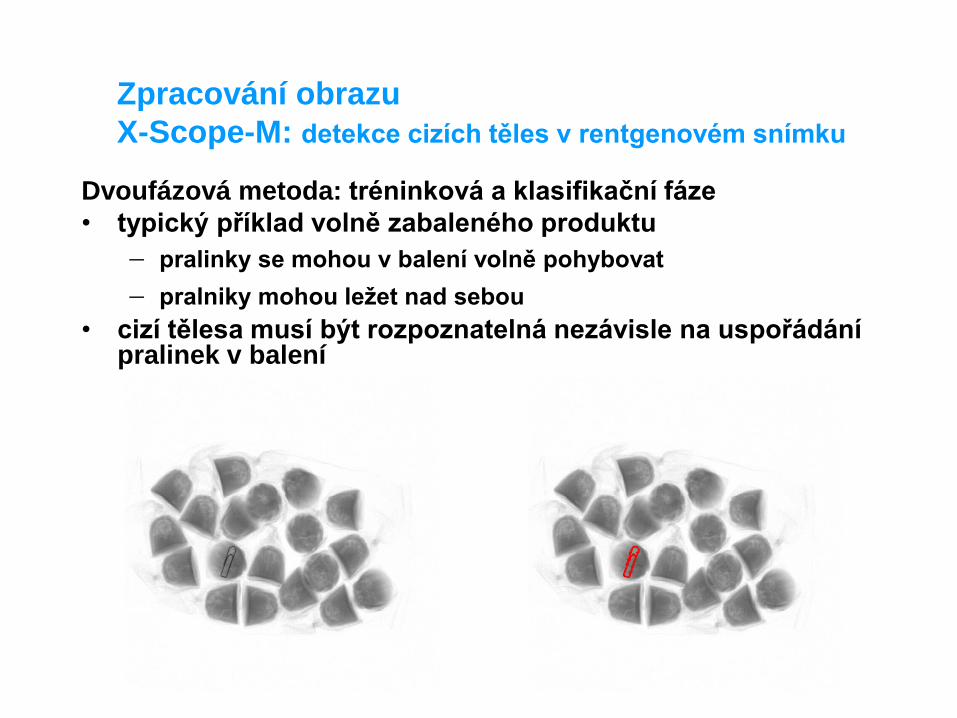
Zpracování obrazu
X-Scope-M: detekce cizích těles v rentgenovém snímku
Dvoufázová metoda: tréninková a klasifikační fáze
• typický příklad volně zabaleného produktu
pralinky se mohou v balení volně pohybovat
pralniky mohou ležet nad sebou
• cizí tělesa musí být rozpoznatelná nezávisle na uspořádání pralinek v balení

Využití CAD
3D tisk plastu

Využítí CAD
Velkoobjemový tisk písku
Zpracování obrazu
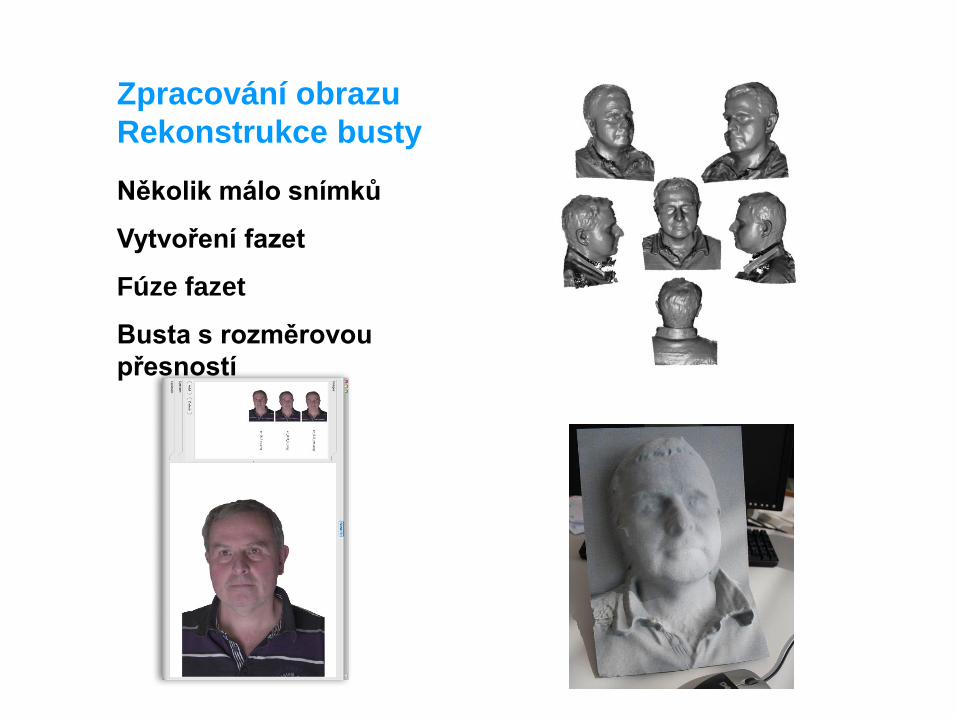
Rekonstrukce busty
Několik málo snímků
Vytvoření fazet
Fúze fazet
Busta s rozměrovou
přesností

Zpracování obrazu
3D rekonstrukce stereo obrazů
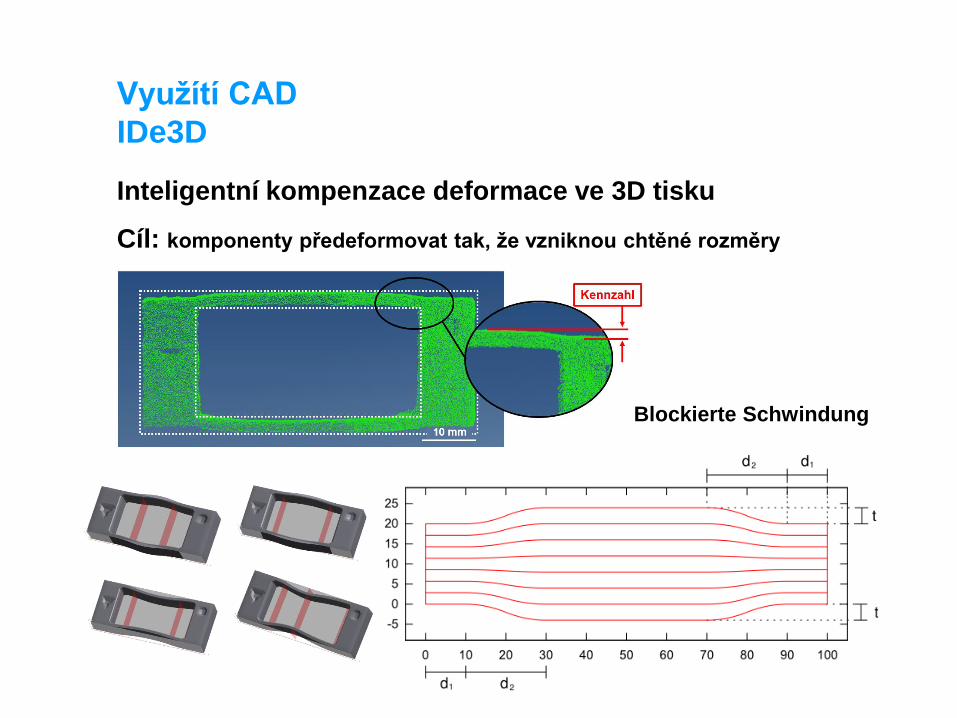
Využítí CAD
IDe3D
Inteligentní kompenzace deformace ve 3D tisku
Cíl: komponenty předeformovat tak, že vzniknou chtěné rozměry
Blockierte Schwindung
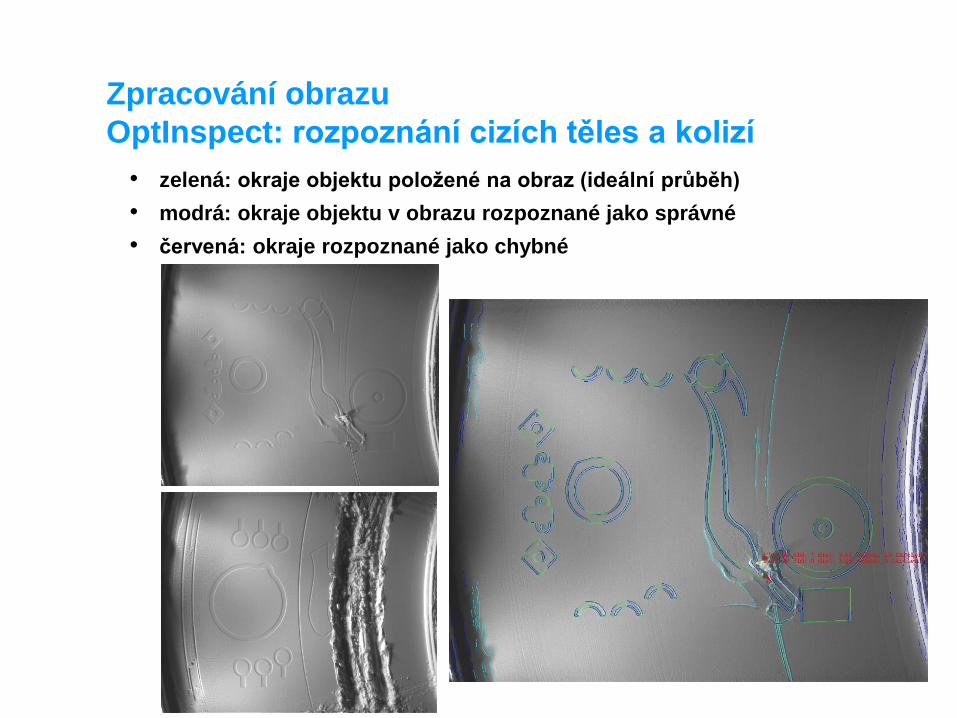
Zpracování obrazu
OptInspect: rozpoznání cizích těles a kolizí
• zelená: okraje objektu položené na obraz (ideální průběh)
• modrá: okraje objektu v obrazu rozpoznané jako správné
• červená: okraje rozpoznané jako chybné
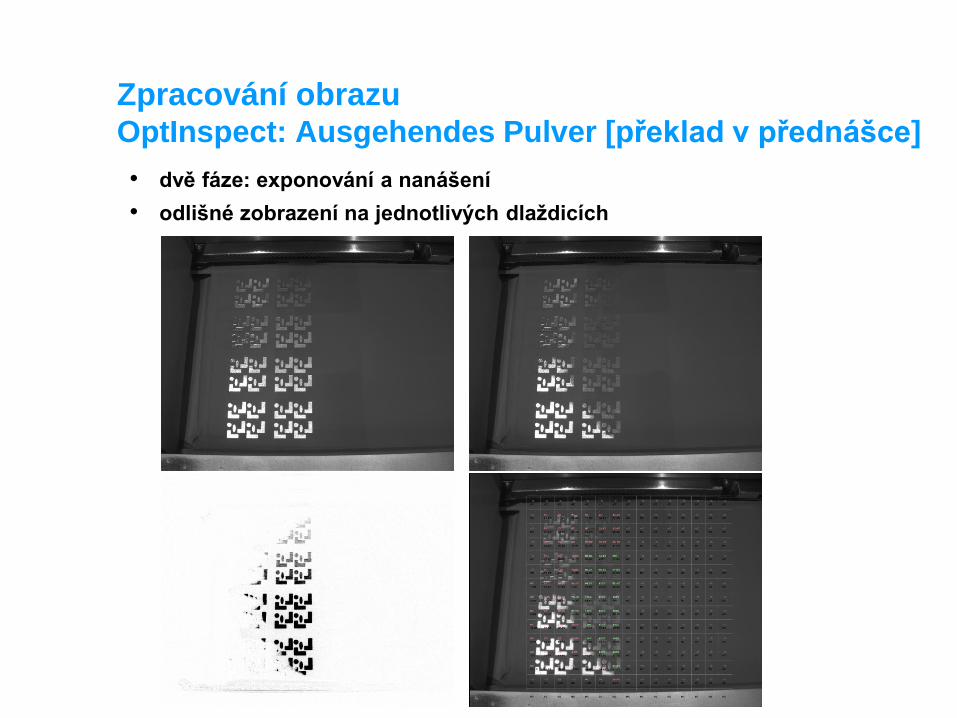
Zpracování obrazu OptInspect: Ausgehendes Pulver [překlad v přednášce]
• dvě fáze: exponování a nanášení
• odlišné zobrazení na jednotlivých dlaždicích

















