38
SYSTÉMY POČÍTAČOVÉHO VIDĚNÍ ROBOTŮ
| Date post: | 01-Jan-2016 |
| Category: |
Documents |
| Upload: | zachery-shepherd |
| View: | 23 times |
| Download: | 2 times |

SYSTÉMYPOČÍTAČOVÉHO
VIDĚNÍ ROBOTŮ
Co je POČÍTAČOVÉ VIDĚNÍ ?
Počítačové vidění jsou technické prostředky, které se snaží napodobit schopnosti lidského vidění.
Jaké úlohy řeší POČÍTAČOVÉ VIDĚNÍ ?
1)Navigace v prostoru2)Rozpoznání tvaru porozumění scéně3) Kontrola rozměrů
Je POČÍTAČOVÉ VIDĚNÍ složité?
1)Ztráta informace o perspektivě2)Jas v obraze závisí na mnoha parametrech
(odrazivost, orientaci povrchu,..)3)Velké množství dat4)Šum5)Obtížné globální zpracování - detail
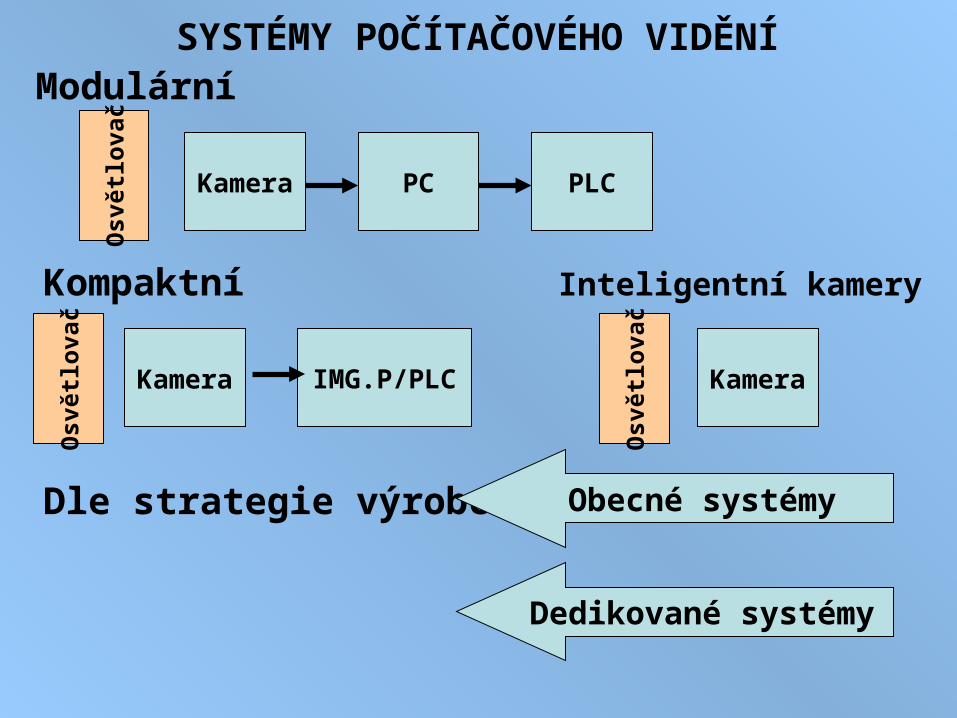
SYSTÉMY POČÍTAČOVÉHO VIDĚNÍ Modulární
Kamera PC PLC
Kompaktní Inteligentní kamery
Kamera IMG.P/PLC Kamera
Dle strategie výrobců Obecné systémy
Dedikované systémy
Osv
ětlo
vač
Osv
ětlo
vač
Osv
ětlo
vač
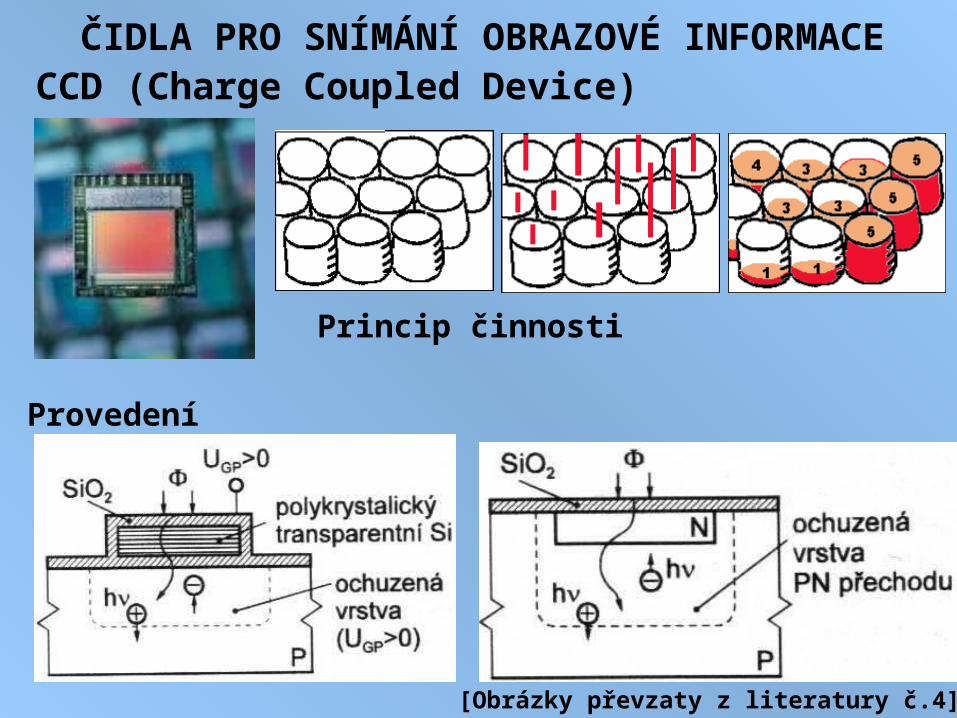
ČIDLA PRO SNÍMÁNÍ OBRAZOVÉ INFORMACE CCD (Charge Coupled Device)
Princip činnosti
Provedení
[Obrázky převzaty z literatury č.4]
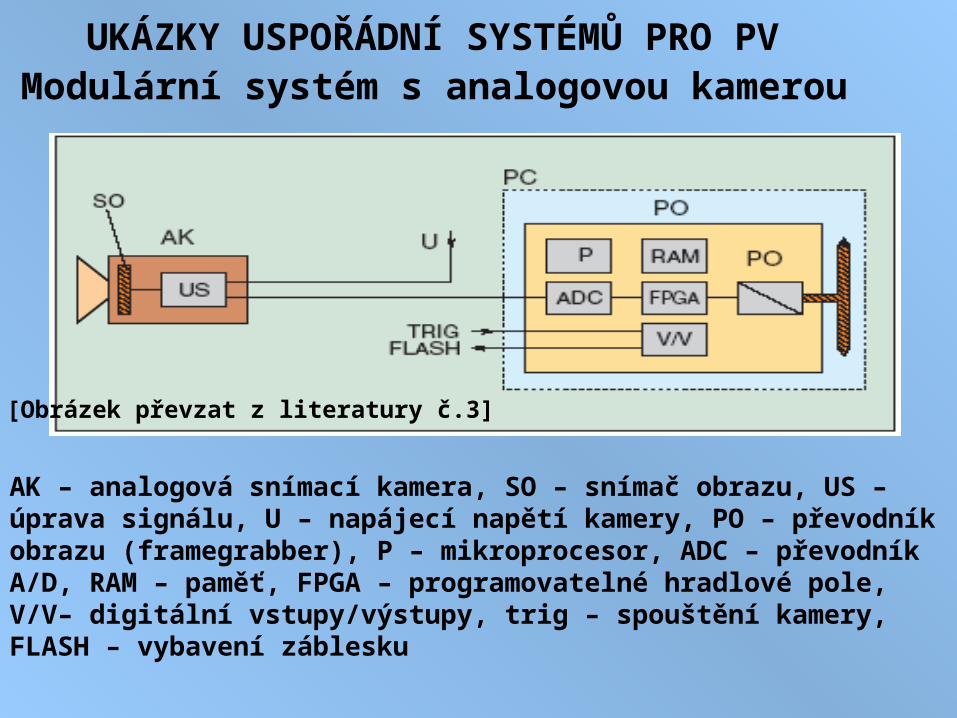
UKÁZKY USPOŘÁDNÍ SYSTÉMŮ PRO PV Modulární systém s analogovou kamerou
AK – analogová snímací kamera, SO – snímač obrazu, US – úprava signálu, U – napájecí napětí kamery, PO – převodník obrazu (framegrabber), P – mikroprocesor, ADC – převodník A/D, RAM – paměť, FPGA – programovatelné hradlové pole, V/V– digitální vstupy/výstupy, trig – spouštění kamery, FLASH – vybavení záblesku
[Obrázek převzat z literatury č.3]
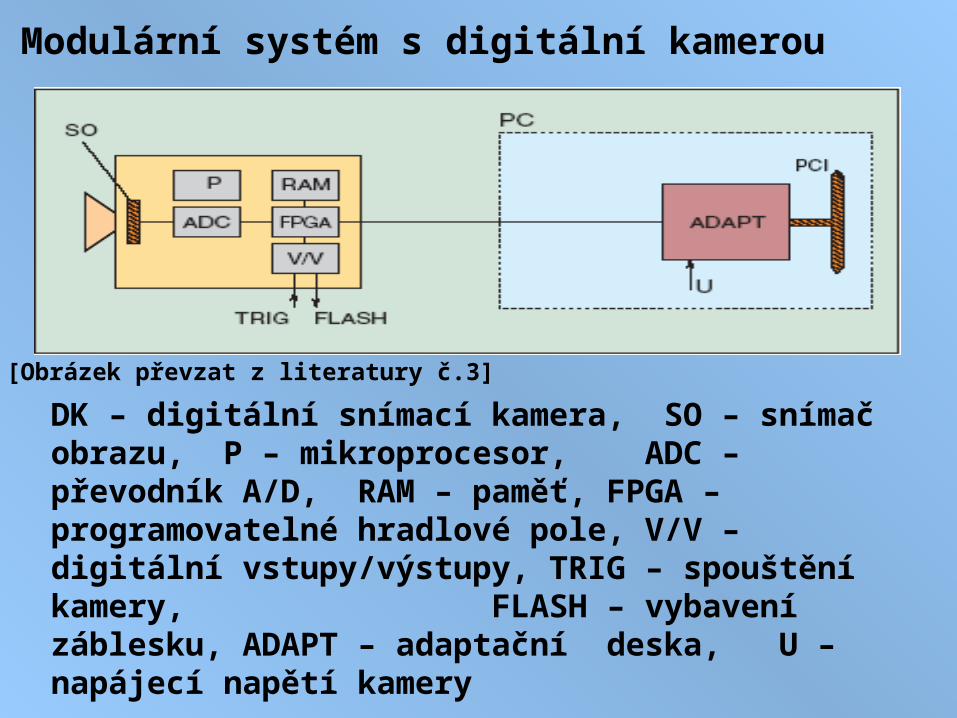
Modulární systém s digitální kamerou
DK – digitální snímací kamera, SO – snímač obrazu, P – mikroprocesor, ADC – převodník A/D, RAM – paměť, FPGA – programovatelné hradlové pole, V/V – digitální vstupy/výstupy, TRIG – spouštění kamery, FLASH – vybavení záblesku, ADAPT – adaptační deska, U – napájecí napětí kamery
[Obrázek převzat z literatury č.3]
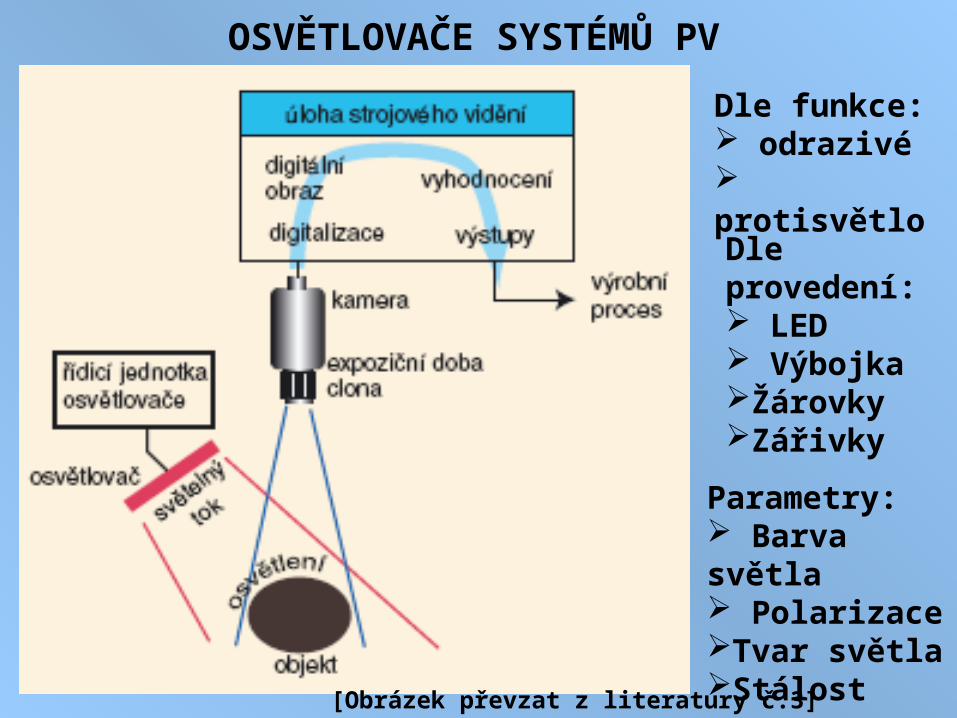
OSVĚTLOVAČE SYSTÉMŮ PV
Dle funkce: odrazivé protisvětlo
Dle provedení: LED VýbojkaŽárovkyZářivky
Parametry: Barva světla PolarizaceTvar světlaStálost
[Obrázek převzat z literatury č.3]
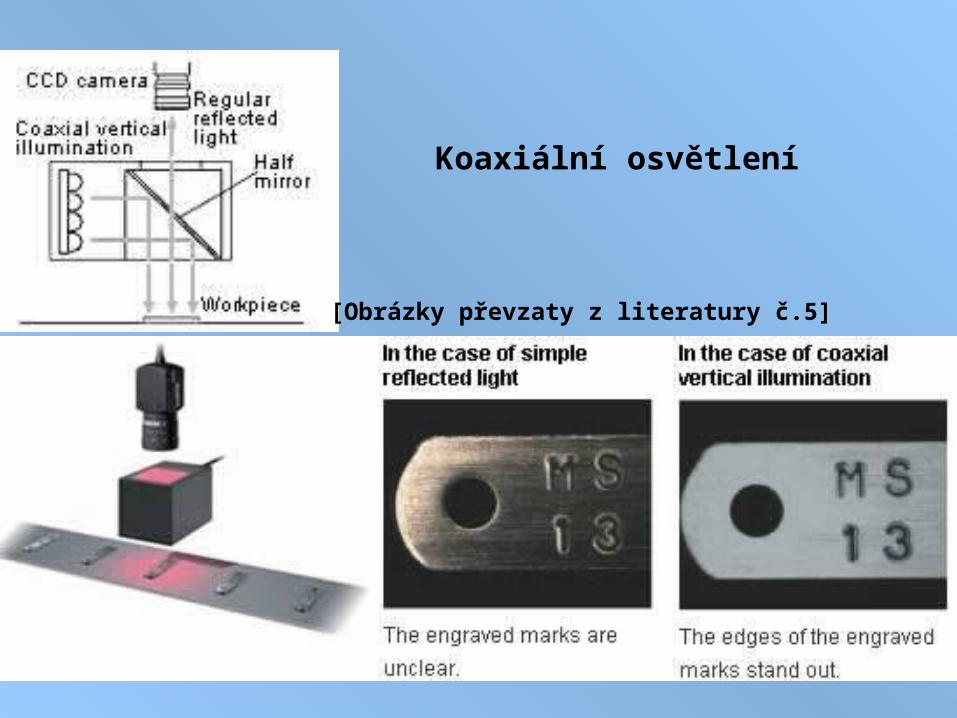
Koaxiální osvětlení
[Obrázky převzaty z literatury č.5]
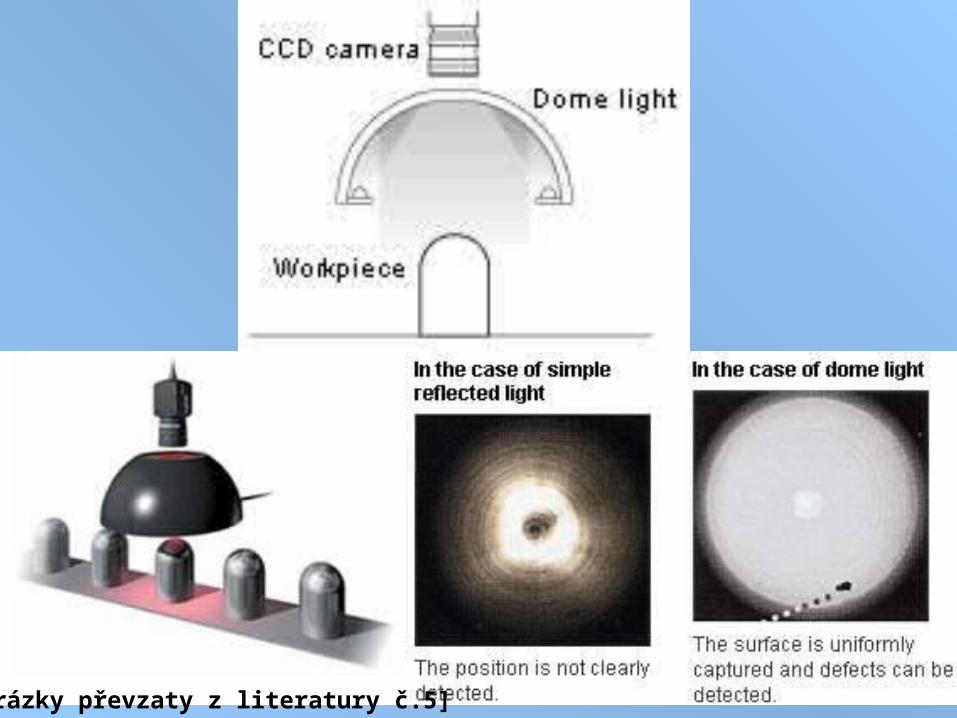
[Obrázky převzaty z literatury č.5]
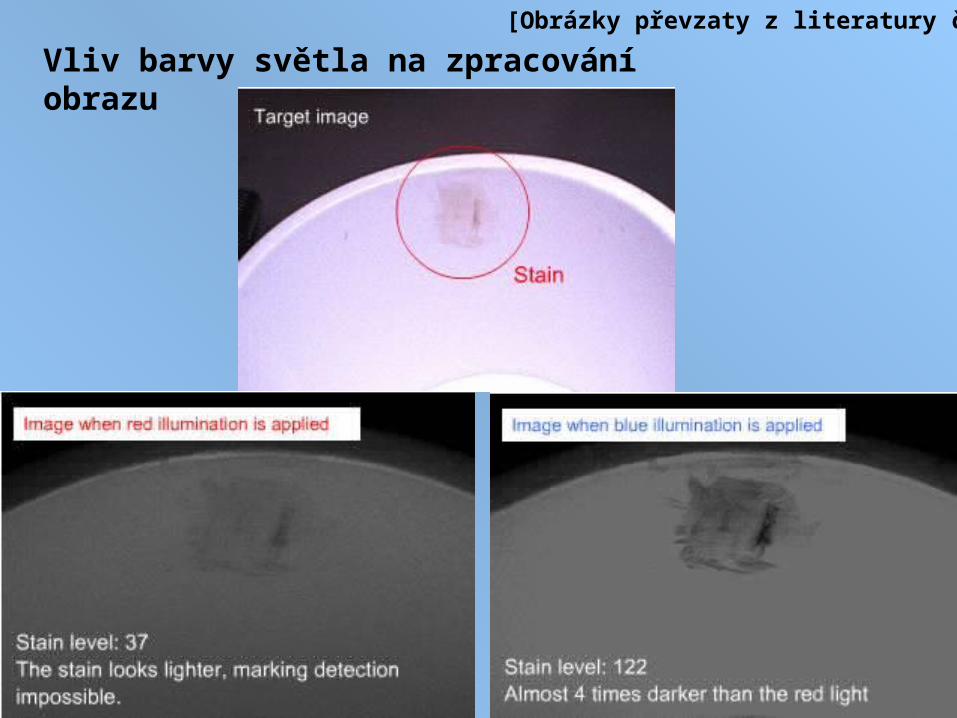
Vliv barvy světla na zpracování obrazu[Obrázky převzaty z literatury č.5]
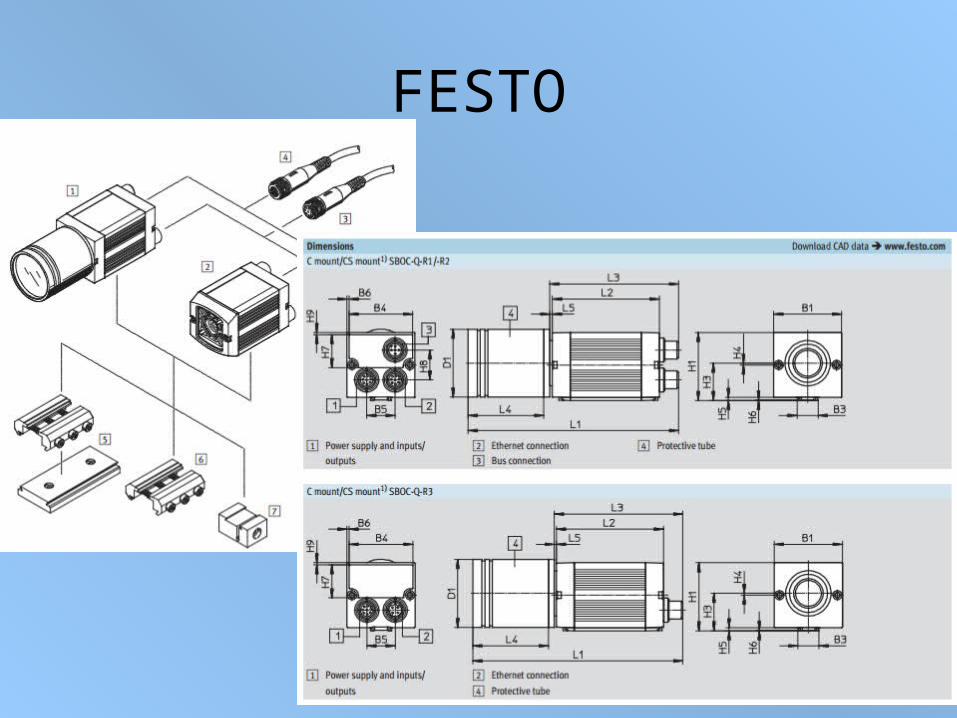
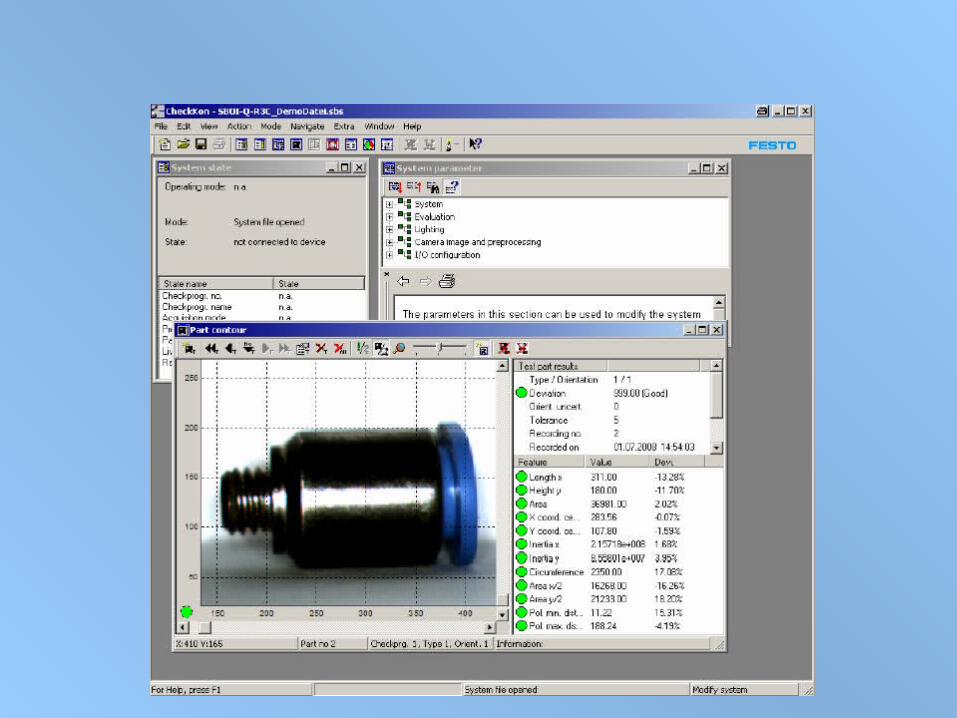
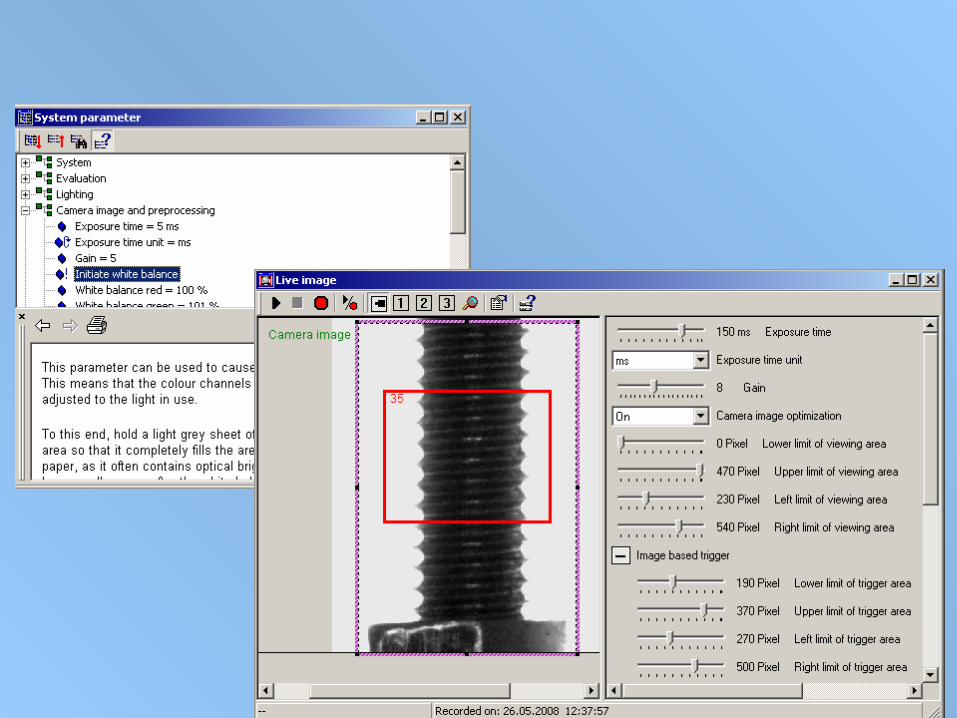
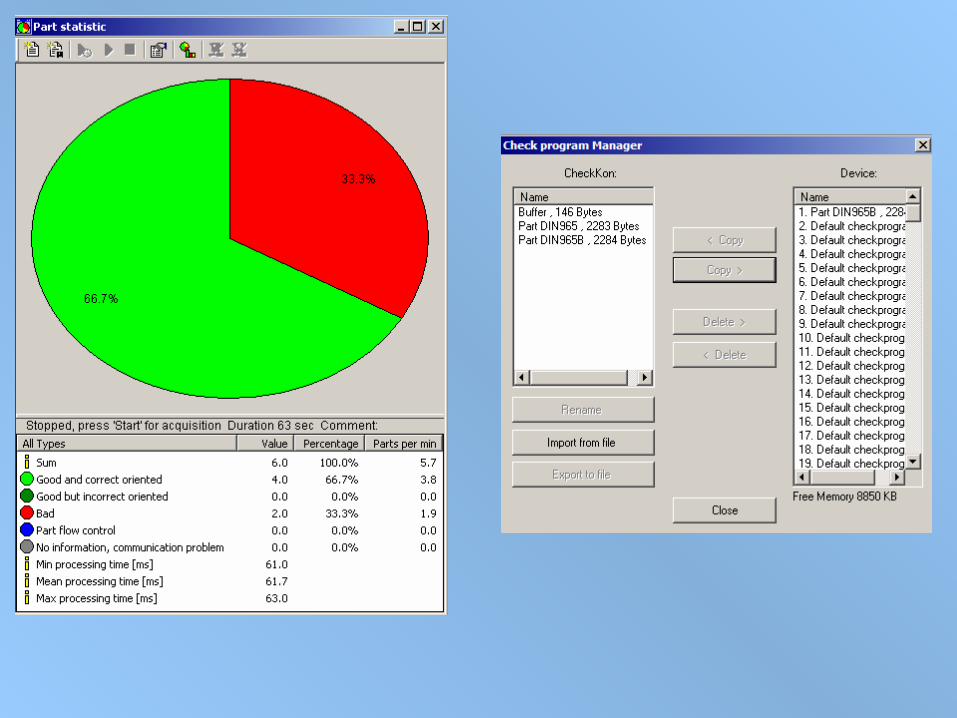
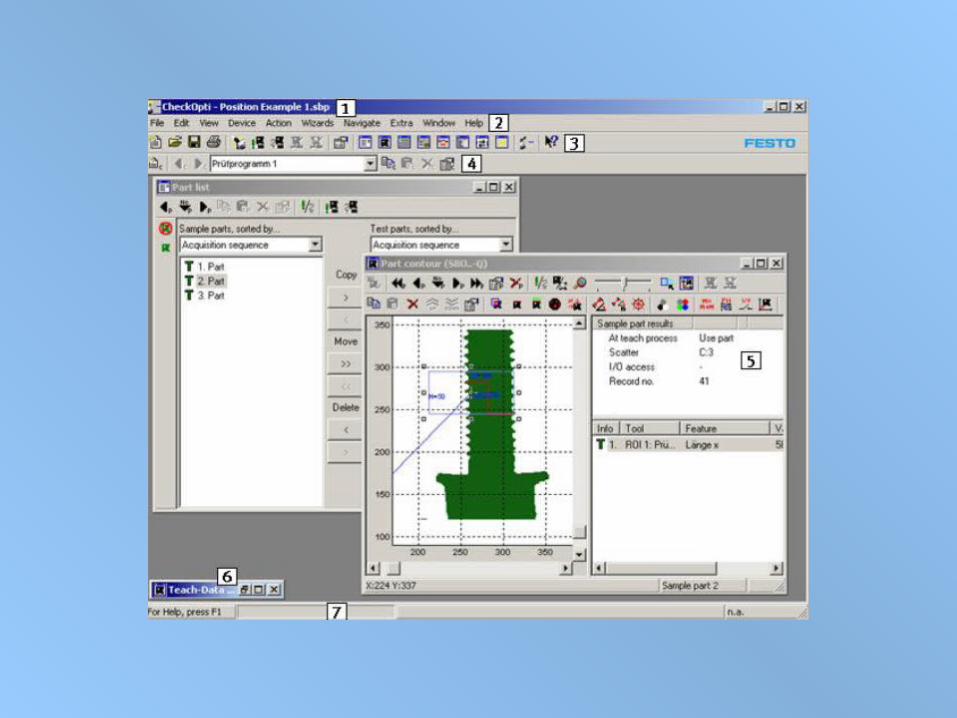
FESTO

IFM
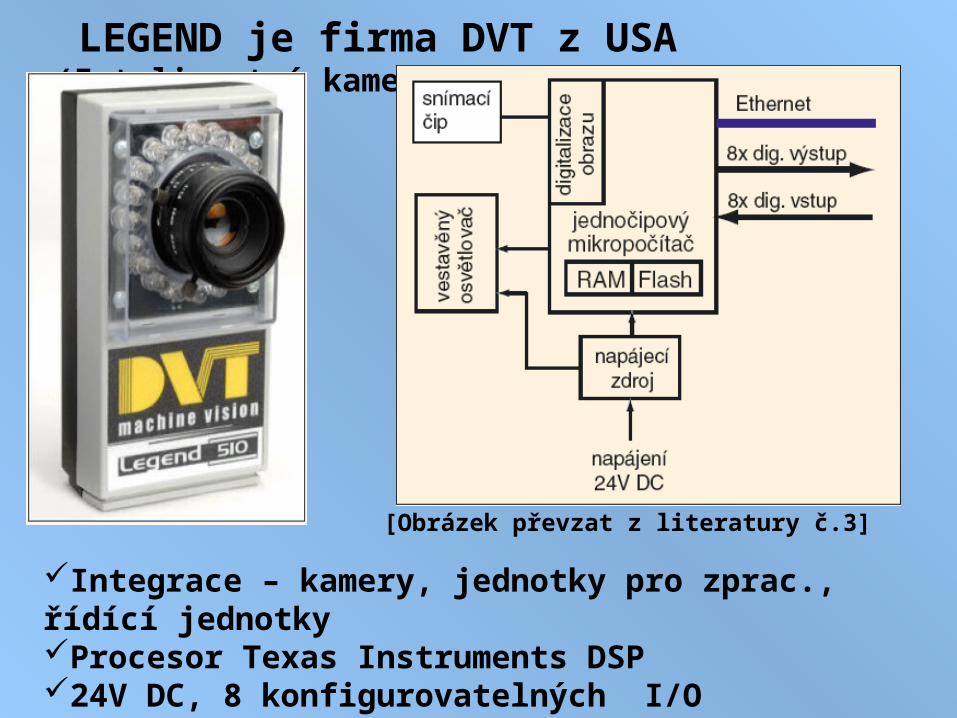
LEGEND je firma DVT z USA (Inteligentní kamery)
Integrace – kamery, jednotky pro zprac., řídící jednotkyProcesor Texas Instruments DSP24V DC, 8 konfigurovatelných I/O
[Obrázek převzat z literatury č.3]
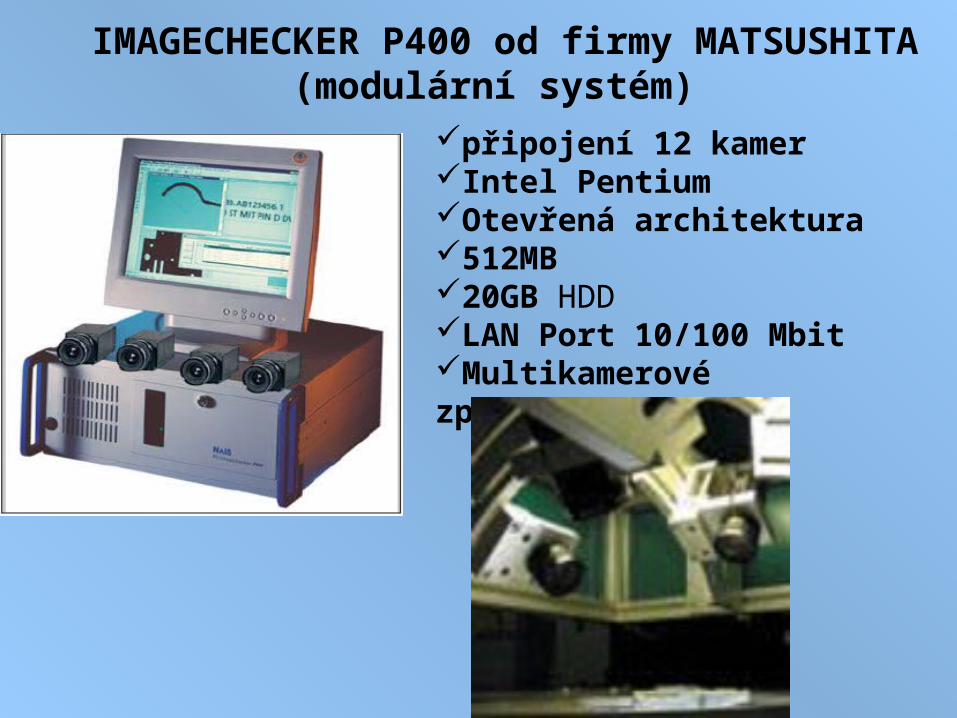
IMAGECHECKER P400 od firmy MATSUSHITA(modulární systém)
připojení 12 kamerIntel Pentium Otevřená architektura512MB 20GB HDDLAN Port 10/100 MbitMultikamerové zpracování
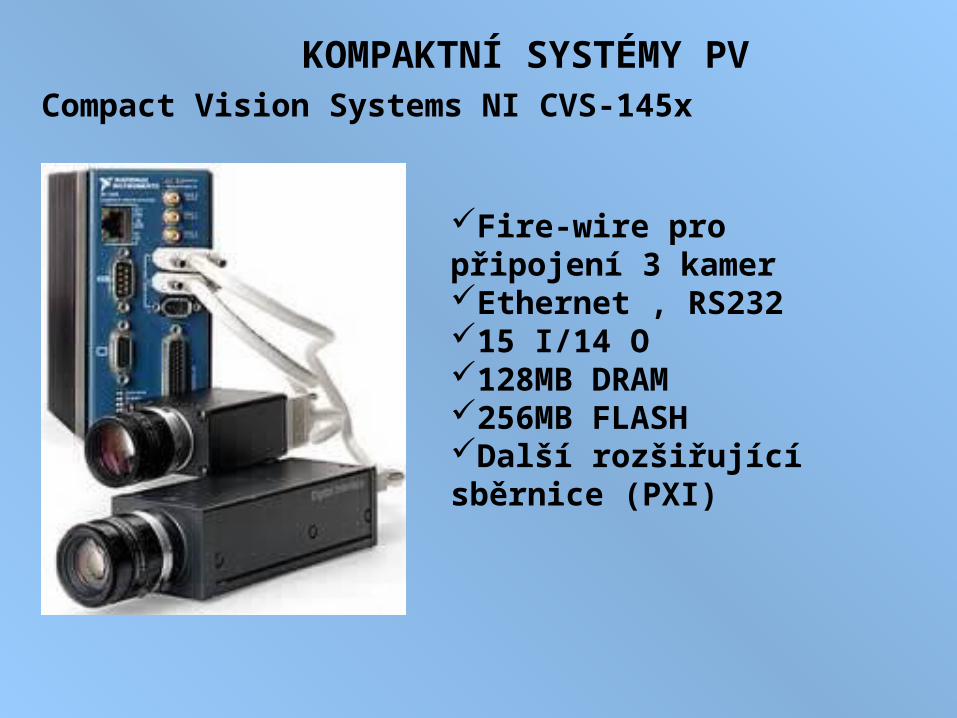
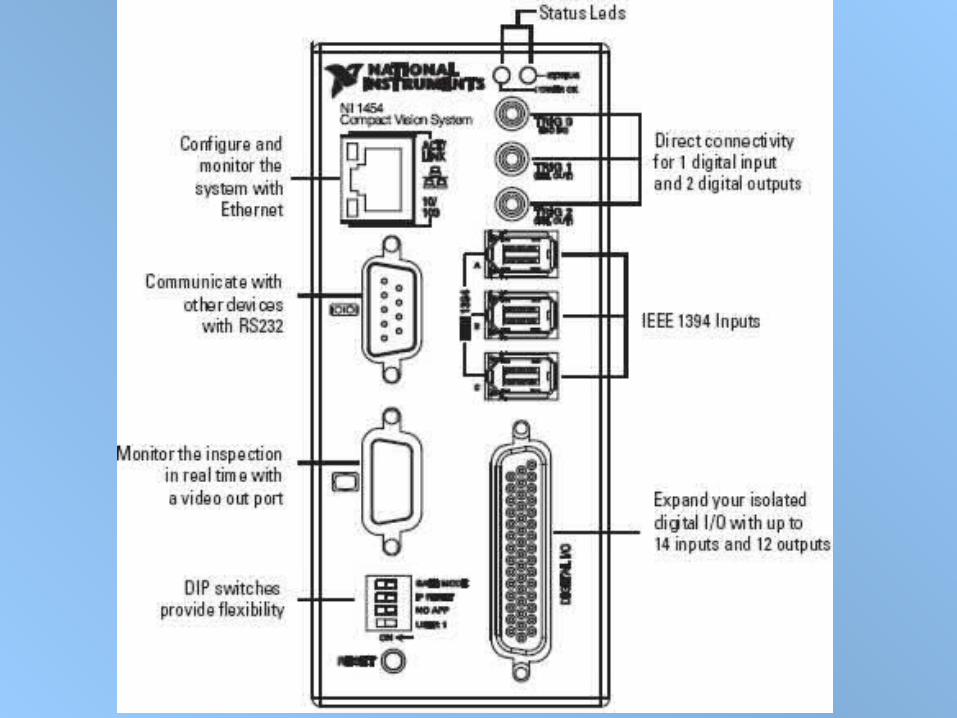
KOMPAKTNÍ SYSTÉMY PV Compact Vision Systems NI CVS-145x
Fire-wire pro připojení 3 kamerEthernet , RS23215 I/14 O128MB DRAM256MB FLASHDalší rozšiřující sběrnice (PXI)
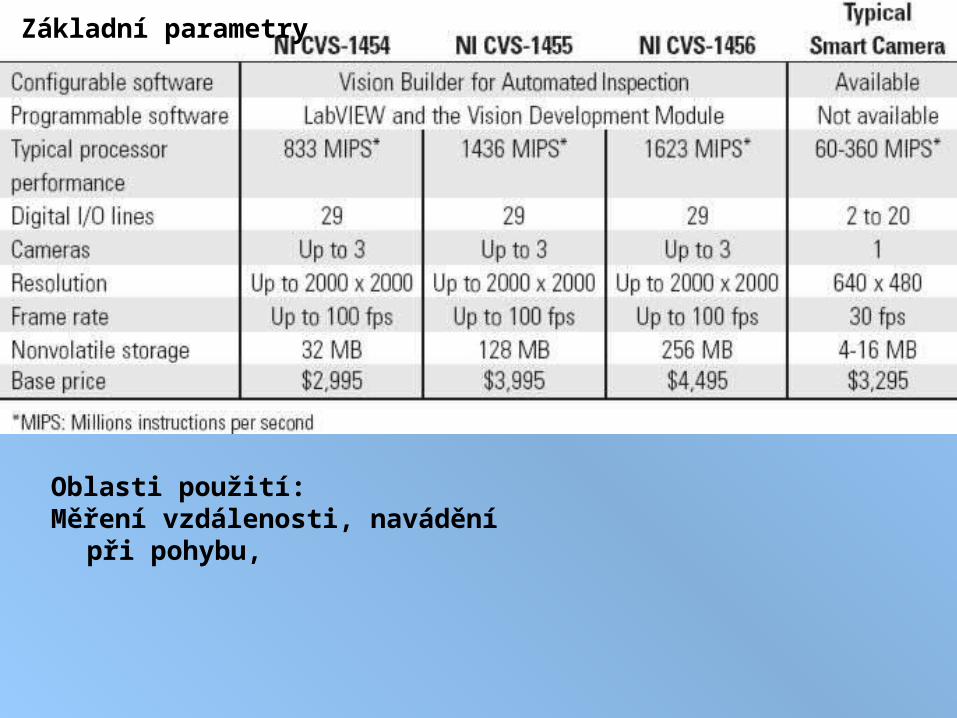
Základní parametry
Oblasti použití:Měření vzdálenosti, navádění při
pohybu,

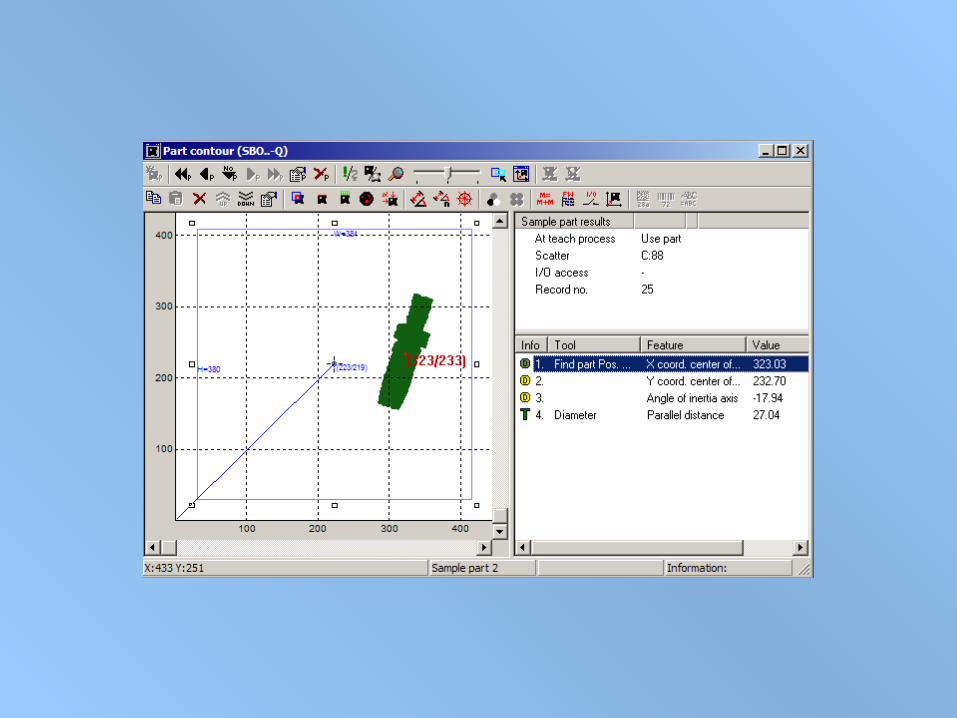
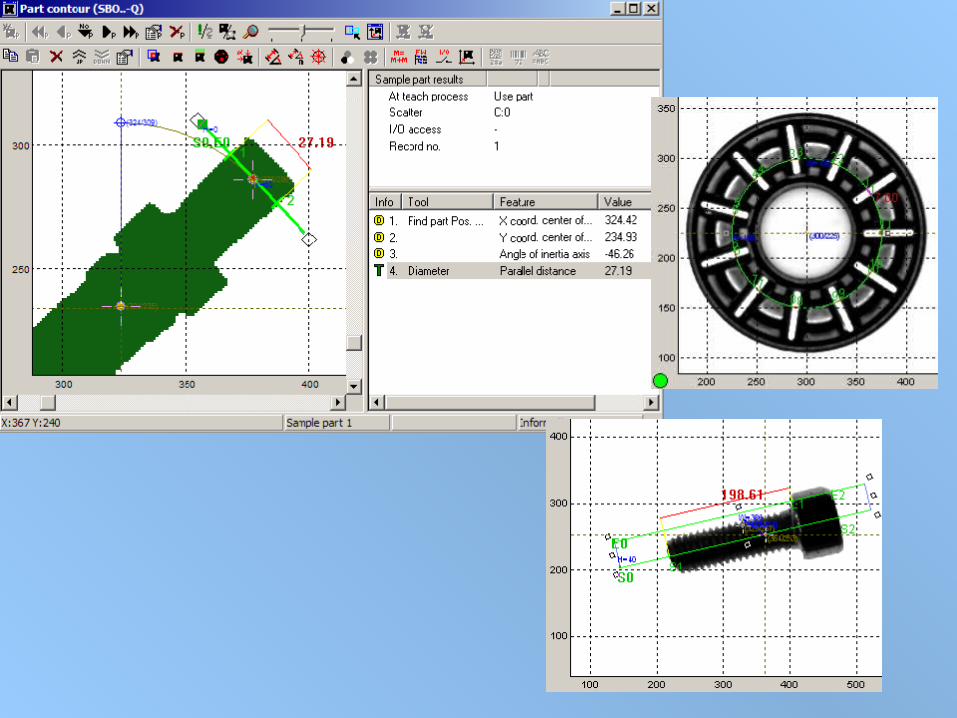
FUNKCE OBECNÝCH SYSTÉMŮ 2D - měření Třídění Detekce pozice Segmentace
Kontrola chybějících částíOCR
Čtení kódů
Měření natočení
Kontrola montáže
[Obrázky převzaty z literatury č.5]
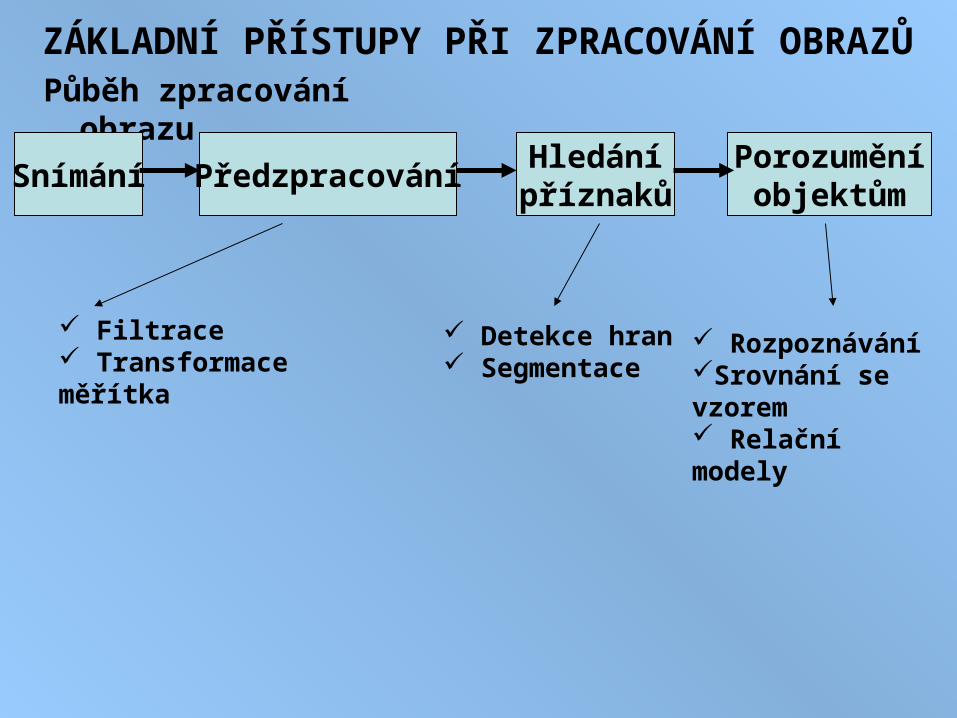
ZÁKLADNÍ PŘÍSTUPY PŘI ZPRACOVÁNÍ OBRAZŮ Půběh zpracování obrazu
Snímání PředzpracováníHledánípříznaků
Porozuměníobjektům
Filtrace Transformace měřítka
Detekce hran Segmentace
RozpoznáváníSrovnání se vzorem Relační modely
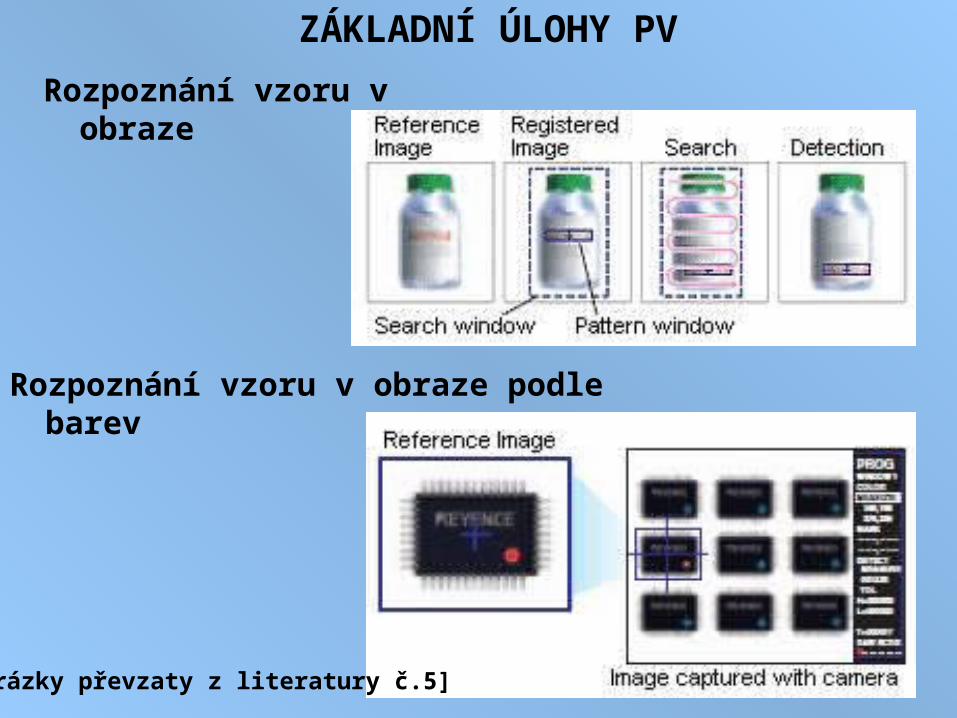
ZÁKLADNÍ ÚLOHY PV
Rozpoznání vzoru v obraze
Rozpoznání vzoru v obraze podle barev
[Obrázky převzaty z literatury č.5]
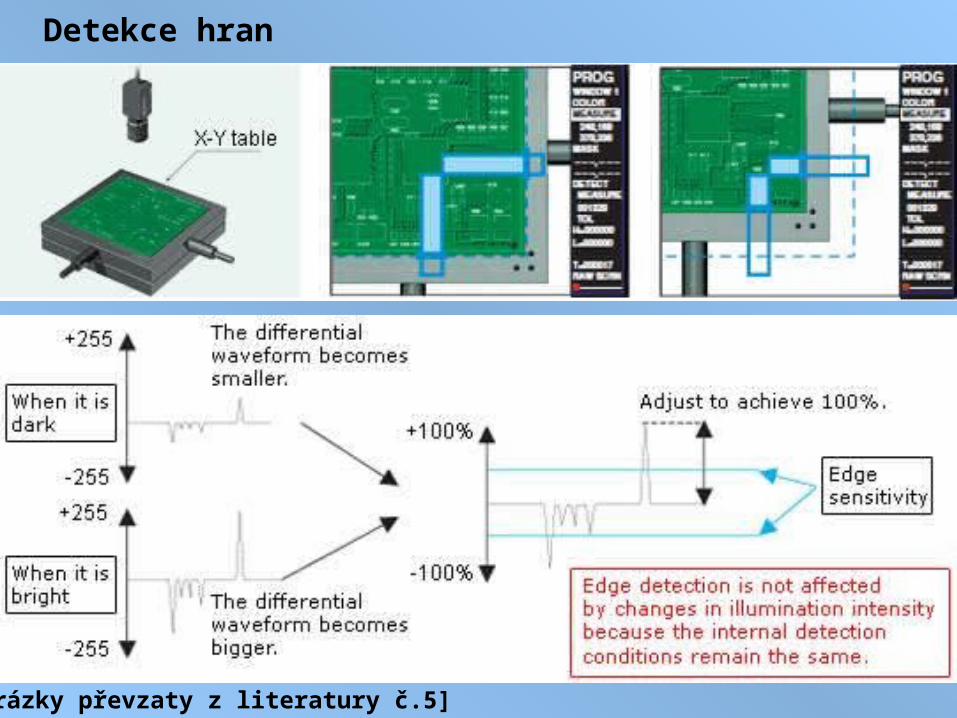
Detekce hran
[Obrázky převzaty z literatury č.5]
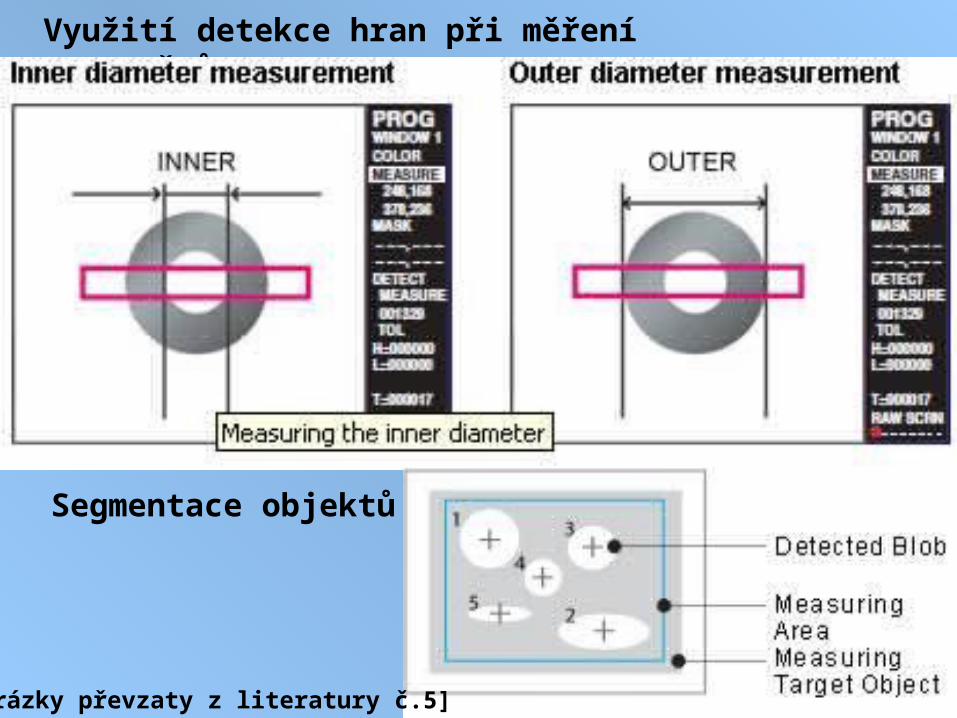
Využití detekce hran při měření rozměrů
Segmentace objektů
[Obrázky převzaty z literatury č.5]
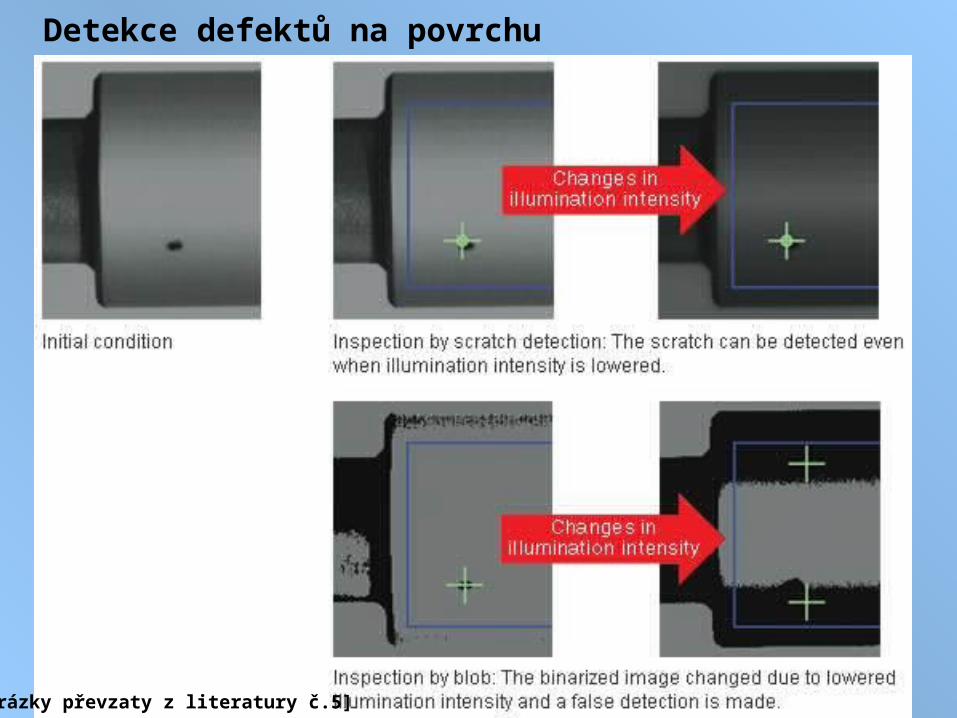
Detekce defektů na povrchu
[Obrázky převzaty z literatury č.5]
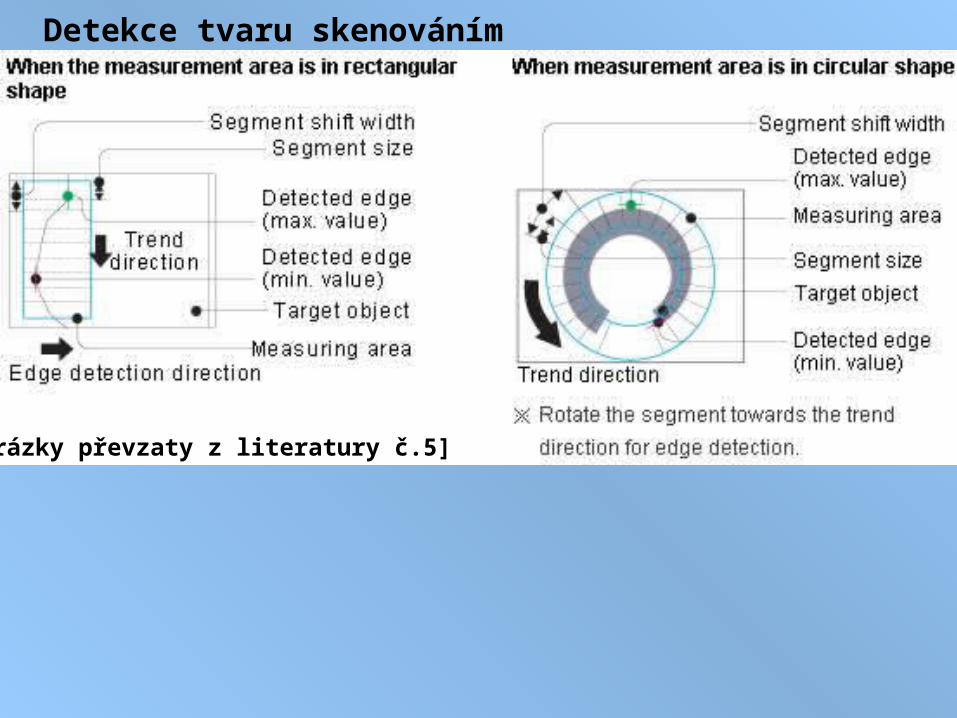
Detekce tvaru skenováním
[Obrázky převzaty z literatury č.5]
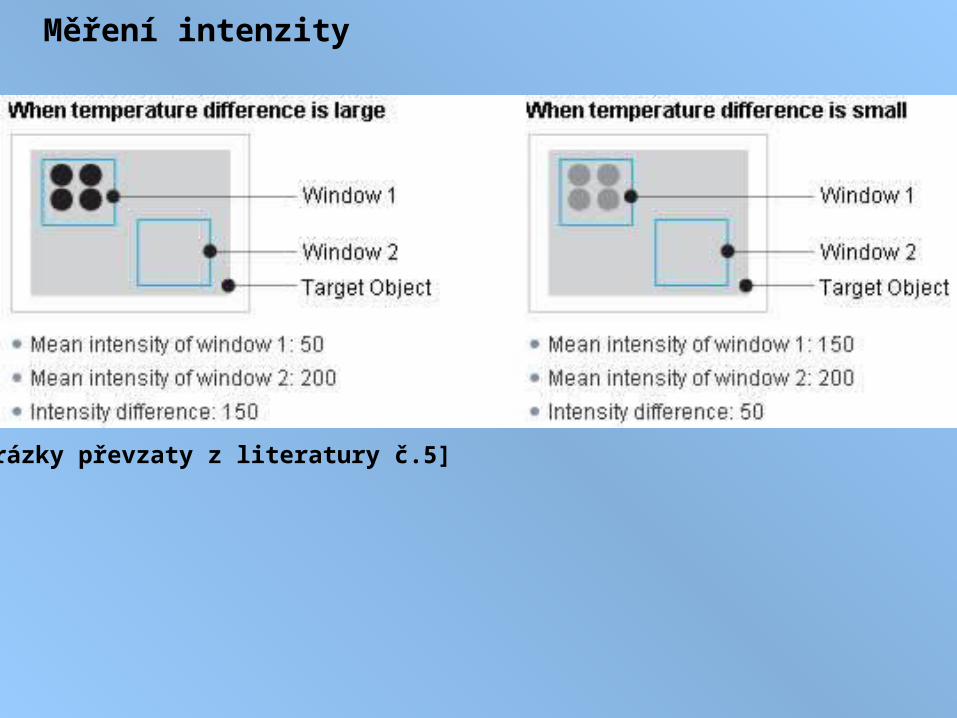
Měření intenzity
[Obrázky převzaty z literatury č.5]

PŘÍLKAD NASAZENÍ PV V ROBOTICE
Na jeden z dílů je při měření promítnuta sada proužků měřícího laseru a poté vyhodnocena jeho poloha i jeho náklon vůči robotu. Výsledkem oměření je stanovení korekcí pro svařovací program robota.
[Obrázek:Centrum Strojového viděníČVUT]
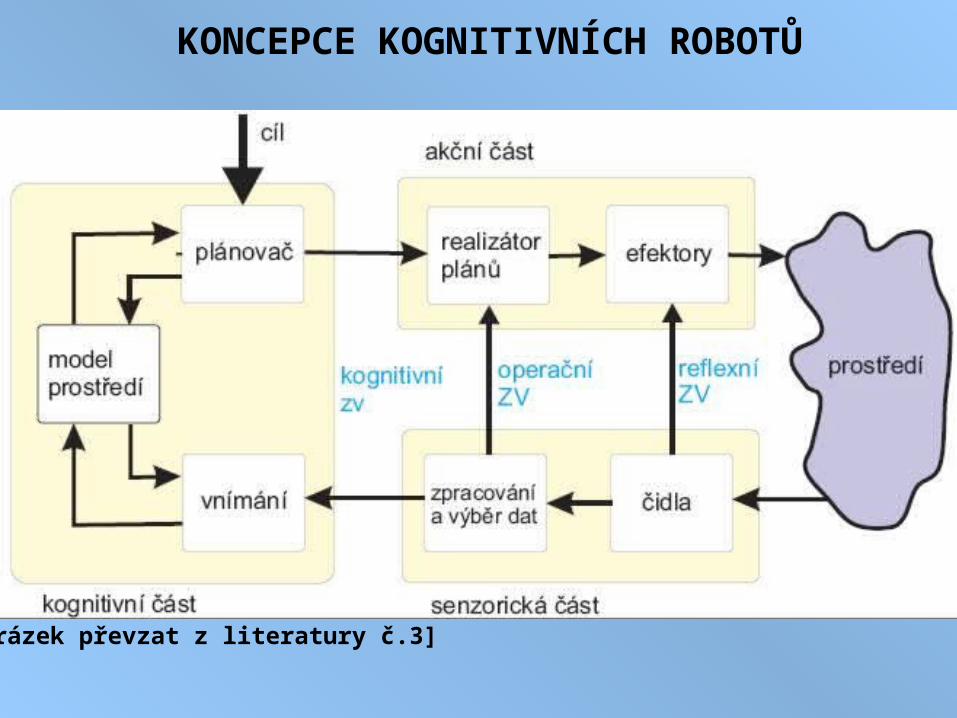
KONCEPCE KOGNITIVNÍCH ROBOTŮ
[Obrázek převzat z literatury č.3]

UKÁZKY KOGNITIVNÍCH ROBOTŮ
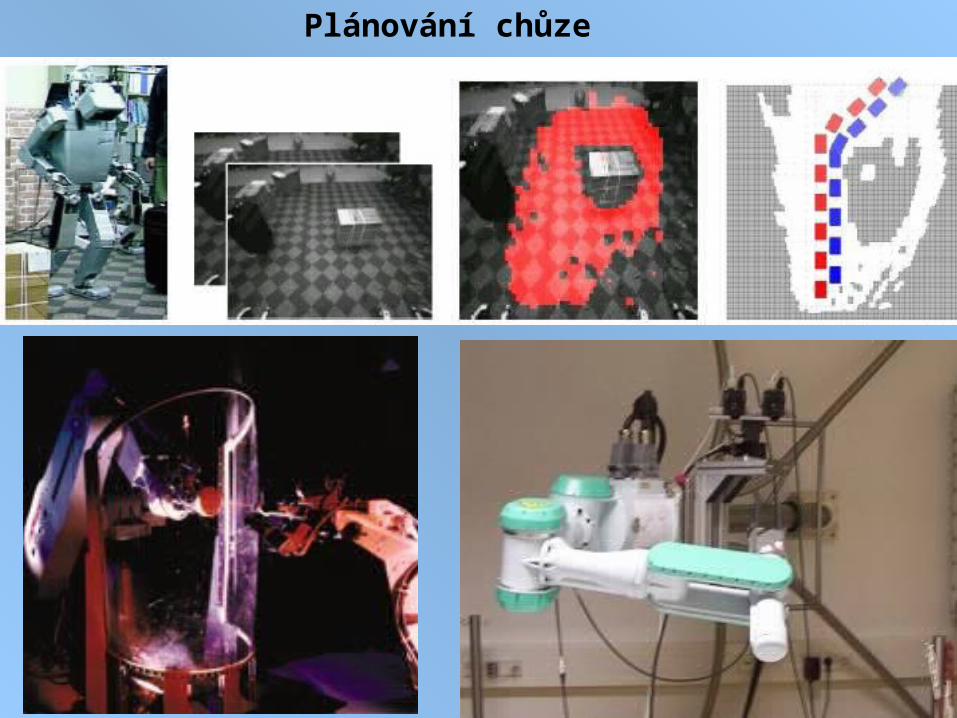
Plánování chůze
Literatura :
[1] Schmid D. a kol.: Řízení a regulace pro strojírenství a mechatroniku. Europa Sobotáles.Praha, 2005.
[2] Talácko J., Matička R.: Konstrukce průmyslových robotů a manipulátorů. ČVUT. 1995.
[3] Trinkl A.: Robotizované třídění strojních součástí s využitím kamerového systému na školním robotizovaném pracovišti Turbo Scara SR60. Dipl. práce. ČZU TF. Praha, 2005.
[4] Ďaďo S., Kreidl M.: Senzory a měřicí obvody. ČVUT, 1999.
[5] WWW.KEYENCE.COM

















