Vysoké učení technické v Brně Fakulta elektrotechniky a informatiky Ústav automatizace a měřící techniky Ing. Milan Findura Řízení rozlehlého nelineárního systému na bázi metod a prostředků umělé inteligence Control of large-scale non-linear system based on methods and means of artificial intelligence Obor: Kybernetika a informatika Školitel: Prof. Ing. Petr Vavřín, DrSc. Datum obhajoby: 27. 10. 1999
Transcript
Vysoké učení technické v BrněFakulta elektrotechniky a informatikyÚstav automatizace a měřící techniky
Ing. Milan Findura
Řízení rozlehlého nelineárníhosystému na bázi metod a prostředků umělé
inteligence
Control of large-scale non-linearsystem based on methods and means
of artificial intelligence
Obor: Kybernetika a informatikaŠkolitel: Prof. Ing. Petr Vavřín, DrSc.
Datum obhajoby: 27. 10. 1999
2
Milan Findura, 1999ISBN 80-214-1511-8
3
OBSAH
1. ÚVOD__________________________________________________ 52. OPTIMALIZACE V TEORII ŘÍZENÍ _________________________ 6
3. NÁVRH ALGORITMU ___________________________________ 123.1. Filosofie návrhu algoritmu______________________________ 123.2. Struktura algoritmu. Popis jednotlivých agentů______________ 133.3. Volba periody vzorkování ______________________________ 16
7.1. Power system and its control ____________________________ 287.2. Control algorithm synthesis _____________________________ 297.3. Simulation results_____________________________________ 307.4. Conclusion __________________________________________ 31
4
5
1. ÚVOD
V průmyslu existuje celá řada soustav, které lze klasifikovat jako komplexní, dis-tribuované, extrémně rozlehlé soustavy, u kterých je přitom nezbytné optimální ří-zení z jednoho centra – dispečinku. Jedná se o celou řadu inženýrských sítí, pro-duktovodů a energovodů. Tyto soustavy se obvykle skládají z velkého množství (de-sítek, často i více) lokálních subsystémů, propojených a vzájemně se ovlivňujícíchprostřednictvím fyzikálních vazeb odpovídajících mechanismu sdílení energie nebohmoty mezi jednotlivými subsystémy. Pro lokální subsystémy je typické, že se jednáo mnohorozměrové, nelineární a často i nestacionární soustavy. Vzhledemk fyzikálnímu charakteru vazeb propojujících spolupracující subsystémy a vzhledemk obvyklé možnosti rekonfigurace topologie celé sítě za chodu lze považovat i sou-stavu jako celek obvykle za nelineární a nestacionární.Řízení takových soustav je vždy hierarchické, skládající se alespoň ze dvou zá-
kladních úrovní řízení – lokální a globální. Lokální úroveň zajišťuje požadovanoufunkci příslušného subsystému a přiměřenou míru ochrany před poškozením ne-správnými akčními zásahy z globální úrovně. Globální úroveň zajišťuje funkci sys-tému jako celku, jeho technicko-ekonomickou optimalizaci, případně další specific-ké funkce. Pro realizaci algoritmů řízení bývají obvykle použity klasické regulátorytypu PID, doplněné specifickými algoritmy – predikcí zatížení, ekonomickou opti-malizací apod. Často se setkáváme se situací, že návrh a vývoj algoritmů stabilizacea optimalizace globální úrovně soustavy probíhá odděleně a nezávisle. Důsledkemtakového přístupu je obvykle neoptimální chování systému jako celku, problémy přirealizaci nových požadavků na provoz soustavy a někdy dokonce problémy se stabi-litou systému.
Cílem předložené disertační práce je návrh a simulační ověření algoritmu pro op-timální řízení rozlehlé nelineární soustavy popsaného typu na globální úrovni. Návrhalgoritmu je řešen na konkrétním případu regulace frekvence a výkonové bilanceelektrizační soustavy České republiky (ES ČR) s ohledem na možné zobecnění for-mulovaných algoritmů na celou třídu výše popsaných průmyslových soustav.
Vzhledem ke složitosti řízené soustavy, různorodosti a protichůdnosti požadavkůje třeba vybavit navrhovaný algoritmus určitou mírou inteligence, která zajistí opti-mální způsob využívání lokálních systémů a bude zajišťovat adaptaci globální úrov-ně řízení při změnách konfigurace řízené soustavy. Při návrhu algoritmu jsou vyu-žity principy expertních systémů a distribuované umělé inteligence, které umožnísplnit tyto požadavky.
6
2. OPTIMALIZACE V TEORII ŘÍZENÍ
2.1. Statické optimalizaceProblém optimalizace, tak jak je chápán v teorii řízení, lze rozdělit do dvou zá-
kladních kategorií podle způsobu matematické formulace optimalizační úlohy. Sta-tické optimalizace zahrnují problémy, které jsou formulovány soustavami algebraic-kých nebo transcendentních rovnic – umožňují tedy zejména optimalizaci ustálenýchstavů technologických případně technicko-ekonomických procesů. Úkolem optima-lizace je nalezení extrému, obvykle minima J* kritéria optimality pro vektor nezá-visle proměnných x z přípustné oblasti Ω:
)(min* xx
JJΩ∈
= , kde nfJ == xx dim),( . (2.1)
Pokud je oblast Ω totožná s Rn (množina reálných čísel), hovoříme o volném ex-trému, pokud je Ω ⊂ Rn, hovoříme o vázaném extrému. Vazební podmínky jsou vy-jádřeny obvykle ve tvaru rovnic a nerovnic, např. podle (2.2):
.0,dim0)(
,,dim0)(
≥=≥
<==
xgxghxh
pnmm
(2.2)
Pro řešení optimalizačních úloh tohoto typu existuje celá škála dobře propracova-ných metod, vhodných pro hledání volných i vázaných extrémů problémů popsa-ných lineárními i nelineárními kritérii optimality.
2.2. Dynamické optimalizaceDynamické optimalizace umožňují nalézt optimální průběhy přechodných dějů
v technologických procesech. Odpovídající optimalizační úloha je proto popsánasoustavou diferenciálních resp. diferenčních rovnic. Uvažujme spojitý dynamickýsystém:
>∈<= kttttttft ,],),(),([)( 0uxx! , (2.3)
kde x je vektor stavu a u je vektor vstupu systému. Úkolem dynamické optimali-zace je nalezení minima funkcionálu (2.4) – kritéria optimality – při dodržení urči-tých omezujících podmínek. Základní omezující podmínkou je relace (2.3), popisu-jící dynamiku řízeného systému. Doplňkové omezující podmínky, pokud jsou pou-žity, obvykle popisují omezení, kladená na vektor vstupních veličin u(t), na interval<t0,tk> resp. na cílovou hodnotu vektoru stavu xk, např. ve tvaru (2.5).
7
,0),(:,0),(
,),(),(
0
0
≥≥∀≥Φ
+Φ= ∫
tLttt
dttLtJ
kk
t
tkk
k
ux,x
ux,x
(2.4)
).(,
,)(
max0
21
tttt
t
k
k
gx
uuu
=≤−
≤≤ (2.5)
Matematickým základem pro řešení úloh dynamické optimalizace je variační po-čet. Podle přístupu k řešení podmínek nutných a postačujících pro existenci relativ-ního případně absolutního minima funkcionálu (2.4) se využívají Hamiltonovy ka-nonické rovnice nebo jejich rozšíření v podobě Hamiltonovy-Jacobiovy rovnice,Pontrjaginova principu minima, Bellmanova dynamického programování nebo růz-ných variant těchto přístupů. Stabilita uzavřené regulační smyčky je ve jmenovanýchpřípadech zajištěna podle Ljapunovovy metody.
Použitý matematický aparát je velmi obecný, a proto byla ze základních matema-tických přístupů odvozena řada konkrétních metod vhodných pro určitou třídu pro-blémů, např. známá Riccatiova rovnice pro řešení tzv. LQ-problému apod.
2.3. Vícekriteriální optimalizaceMatematická formulace obecné úlohy statické optimalizace vyjádřená vztahy
(2.1) a (2.2) je často velmi vzdálená praktickým problémům, protože jediné kritéri-um s několika pevně stanovenými omezeními většinou není schopno respektovatřešený problém s dostatečnou přesností. V praxi je daleko častější případ, kdy jekritérium vyjádřeno pomocí vektoru f(x) = [f1(x), f2(x), .. fn(x)], přičemž relativnívýznam dílčích kritérií (cílů) fi(x) je důležitý při vyjednávání o optimálním kom-promisu. Teoretický přístup, který umožňuje formalizovat řešení praktických úlohpopsaného typu je nazýván vícekriteriální optimalizace (angl. multi-objective opti-mization). Úloha statické vícekriteriální optimalizace je formulována takto:
)(min)( ** xfxfx Ω∈
= , (2.6)
.,dim0)(
,,dim0)(
21 xxxgxghxh
≤≤=≥
<==p
nmm(2.7)
Vzhledem k tomu, že f(x) je vektor, nemá takto definovaná úloha jediné řešení.Proto se obvykle uplatňuje tzv. princip rovnocennosti (angl. non-inferiority) – rov-nocenné řešení je takové, kdy při snížení hodnoty jedné složky vektoru f(x) dojdenutně ke zvýšení hodnoty jiné složky vektoru:
8
)].()(:[)]()(:..1[
::**** xxxxxx
xxx
jjii ffjffmi ≥∆+∃∨>∆+=∀
Ω∈∆∧<∆∆∀ ε(2.8)
Řešení úlohy vícekriteriální optimalizace se obvykle převádí na řešení obecnéúlohy nelineárního programování popsané vztahy (2.1) a (2.2). Používá se přitomněkterá ze tří základních metod:! metoda váženého průměru
Aplikací vztahu (2.9) na účelovou funkci (2.6) je úloha převedena. Vhodnouvolbou váhového vektoru αααα lze dosáhnout správného ocenění dílčích kritérií fi(x).
)(xfα ⋅= TJ , kde ],...,,[ 21 nT ααα=α . (2.9)
Tato metoda je velmi jednoduchá a účinná, má však jedno omezení – je-li ob-last obrazů Λ funkce f konkávní, nemusí být vždy nalezeno optimální, nýbržpouze suboptimální řešení, protože některé body oblasti Λ jsou nedostupné.
! metoda „ε-omezení“ (angl. ε-constraint method)Převod úlohy se provede podle vztahu (2.10) – minimalizace se provádí ve
směru vybrané nejvýznamnější (j-té) souřadnice – primárního cíle. Ve směruostatních souřadnic se zajišťuje nepřekročení určité maximální hodnoty odpoví-dajících složek kritéria. Tím se převede úloha minimalizace v těchto směrech naúlohu respektování omezení analogicky vztahu (2.2).
iij fjinifJ ε≤≠=∀= )(:,..1),( xx . (2.10)
Tato metoda je značně citlivá na správnou volbu primárního cíle fj a omezeníεi, což je pro větší n a složitější tvar funkce f velmi obtížné.
! metoda „dosažení cíle“ (angl. goal-attainment method)Minimalizační úloha je formulována takto:
γγγ Ω∈∈
=x,
* minR
takové, že *)( fαxf ≤− γT . (2.11)
Součástí zadání je tedy volba odhadu cíle minimalizace f* a vektoru vah αααα.Úkolem minimalizace je nalezení nejmenšího γ, které splňuje zadanou podmínku.Odhad cílů f* může být relativně volný, přičemž vektor vah αααα určuje, do jaké mí-ry je třeba stanovený cíl dodržet – např. pro α i = 0 je i-tý cíl zadán jako striktnípředpis a příslušná složka vztahu (2.11) přechází na omezující podmínku analo-gickou vztahu (2.2).
2.4. Zhodnocení možností řešení problémuPři vícekriteriální optimalizaci řízení ES ČR je nutné pečlivě vyvažovat hodnoty
dílčích cílů fi, aby bylo dosaženo optimálního kompromisu. Tomu musí odpovídat
9
i rozsah hodnot a způsob jejich nárůstu u jednotlivých dílčích cílů. Důsledkem jeskutečnost, že kriteriální funkce L (viz dále) není obvykle spojitě diferencovatelná.
Vzhledem k uvedeným skutečnostem není možné použít žádnou z konkrétníchmetod dynamické optimalizace publikovaných v literatuře; je třeba využít některéz obecných metod, které zavádějí pouze minimální předpoklady o vlastnostech rov-nic, popisujících regulovanou soustavu, omezení a kritéria optimality. Vzhledemk tomu, že popsané obecné metody vedou většinou na řešení nelineárních matico-vých parciálních diferenciálních rovnic v každém kroku zpětnovazebního řízení, lzeočekávat velmi vysokou výpočetní náročnost takového řešení. Ta je dále zvýšenaextrémní rozlehlostí regulované soustavy, tedy vysokým rozměrem soustavy rovnic(2.3). V důsledku extrémního zjednodušení popisu regulované soustavy pro účelyglobálního algoritmu řízení je nalezený popis celé soustavy i přes svoji složitostpouze velmi přibližný. Řízení soustavy bude zřejmě vždy pouze suboptimální bezohledu na složitost použité metody a numerickou náročnost výpočtu
Při návrhu algoritmu řízení ES ČR se proto pokusíme nalézt algoritmus, který byvycházel z existujících metod zajištění stability a optimality chování dynamickéhosystému, ale vhodnou dekompozicí problému umožnil výrazné zjednodušení úlohya uplatnění heuristik. Použití heuristik, zejména v podobě přehledných pravidel čifunkčních předpisů pro dílčí operace, umožní snížit numerickou náročnost výpočtua výrazně usnadní spolupráci s technology během celého životního cyklu algoritmu.
2.5. Kritéria hodnocení dynamických dějůPro hodnocení a optimalizaci dynamických dějů v regulované soustavě (ES ČR)
bylo navrženo kritérium ve tvaru:
∫ ∑∑==>∈< −
−+⋅=k
k
t
ti
k
ii
ki
k
ii
tttdttL
tttLJ
00),~(1),~(max
101,xx αεαε ,
kde: ∑=
=>∈<>∈<k
iii
11,1,0,1,0 ααε . (2.12)
Toto kritérium je v podstatě upravené integrální kritérium (2.4), které zahrnuje jakcelkové hodnocení děje a jeho dynamiky, tak zhodnocení úseku děje s nejhoršímivlastnostmi. Sumace se provádí přes všechna dílčí kritéria L1 až Lk s odpovídajícímivahami α1 až αk. Použití střední hodnoty místo prostého integrálu zajišťuje dodrženídefinovaného měřítka hodnot – to usnadní zejména kvantitativní interpretaci dosa-žených výsledků na základě hodnot kritéria. Jednotlivá dílčí kritéria jsou:
! Kritérium kvality regulace výkonu a frekvence v ES ČRToto dílčí kritérium hodnotí korektnost chování ES ČR vůči zbývajícím ES UCP-
TE, tedy kvalitu regulace výkonu a frekvence vzhledem k poruchám vznikajícímuvnitř ČR. Pro hodnocení je použit vztah:
10
)()(),~( 12111 tfktPktL ∆+∆=x . (2.13)
! Kritérium efektivity vynaložené regulační práceJedná se o detekci situace, kdy v důsledku neoptimálního rozdělování celkového
žádaného výkonu mezi jednotlivé výrobny dojde k tomu, že jedna výrobna zvyšujevýrobu a druhá současně výrobu snižuje. K tomuto jevu nutně dochází při přeroz-dělování výroby za účelem zlepšení ekonomiky, nicméně nadměrný výskyt snižujeefektivitu regulační práce ES – skutečně vynaložená regulační práce je větší nežpráce nezbytně nutná. Odpovídající kritérium má tvar:
rychlostí zatěžování a zrychlením, které snižují životnost technologie výroben:
( ) ∑=
++=n
jjjj tLtLtL
ntL
1,33,32,313 )],~(),~(),~([1,~ xxxx . (2.15)
Dílčí kritérium ( )tL ,~31 x hodnotí zatěžování konkrétní j-té výrobny v těsné blíz-kosti mezí RR:
( )
−
−−⋅⋅=
jj
jjjezj NN
NNtNfktL
min,max,
min,max,,131,31
)(2,~x ,
kde )1,min()( 321 xxf = . (2.16)
Argument funkce (zlomek) transformuje zadaný výkon z intervalu <Nmin,j, Nmax,j>do intervalu <-1, +1>. Funkce f1 nabývá hodnotu blízkou nule v celém RR bloku,pouze na dolním a horním okraji RR narůstá k hodnotě +1.
Dílčí kritérium ( )tL ,~32 x hodnotí zatěžování konkrétní j-té výrobny rychlýmizměnami výkonu:
( )
⋅⋅=
tdNd
fktL jez
jj
,232,321,~
νx ,
kde )1,min()( 32 xxf = . (2.17)
11
Argument funkce transformuje rychlost změny výkonu bloku v rozsahu <-νj,+ νj>do rozsahu <-1, +1>. Funkce f2 nabývá hodnotu blízkou nule přibližně v intervalu<−0,5, +0,5>, při vyšší rychlosti zatěžování progresivně stoupá k hodnotě +1.
Dílčí kritérium ( )tL j ,~,33 x hodnotí zatěžování konkrétní j-té výrobny zrychlením,tedy změnou rychlosti zatěžování (např. situace, kdy blok často mění směr změnyvýkonu – typické pro stávající algoritmus a práci bloků v EDC):
( )
⋅⋅= 2
,2
331333,33 ,ˆ
td
NdkfktL jez
jj ν
x ,
kde )1,min()( 23 xxf = . (2.18)
Argument funkce transformuje zrychlení změny výkonu bloku [MW.s-2] do roz-sahu <−1, +1> pomocí koeficientu k331 – na rozdíl od omezení rychlosti zatěžováníνi není totiž hodnota omezení zrychlení bloku ζ i explicitně definována a určuje se nazákladě provozních zkušeností v závislosti na typu výrobny.
! Míra poměrných nákladů na výrobuProtože je obtížné definovat optimalitu pracovního bodu jednotlivých výroben
z hlediska ekonomického, je zřejmě vhodnější zhodnotit měrnou finanční náročnostvýroby ES jako celku. Vzhledem k velkému počtu bloků se pak snáze projeví vlivstrategie rozdělování výkonu.
( )opt
opt
ccc
ktL−
⋅= 44 ,~x , (2.19)
kde c resp. copt jsou měrné náklady [Kč.MWh-1] při aktuální resp. optimálnískladbě výroben. Náklady jednotlivých výroben se určují experimentálně. Získanázávislost nákladů na výkonu výrobny se aproximuje polynomem druhého řádu, tak-že platí:
iieziieziiN cNbNaC +⋅+⋅= ,2,, 2
1, (2.20)
∑
∑
=
== n
iiez
n
iiN
N
Cc
1,
1,
. (2.21)
Měrné náklady při optimální skladbě lze určit pouze v případě, že je optimálnískladba známá. V případě reálné ES ČR je optimální skladba pro předpokládané za-tížení určována v rámci denní přípravy výroby. Pro účely návrhu expertního algo-ritmu lze vzhledem k malému počtu typových výroben vypočítat optimální skladbu
12
minimalizací výrazu (2.21) vzhledem k hodnotám zNe,i pro i = 1.. n při dodrženíomezující podmínky
∑=
=n
ieziez NN
1, . (2.22)
3. NÁVRH ALGORITMU
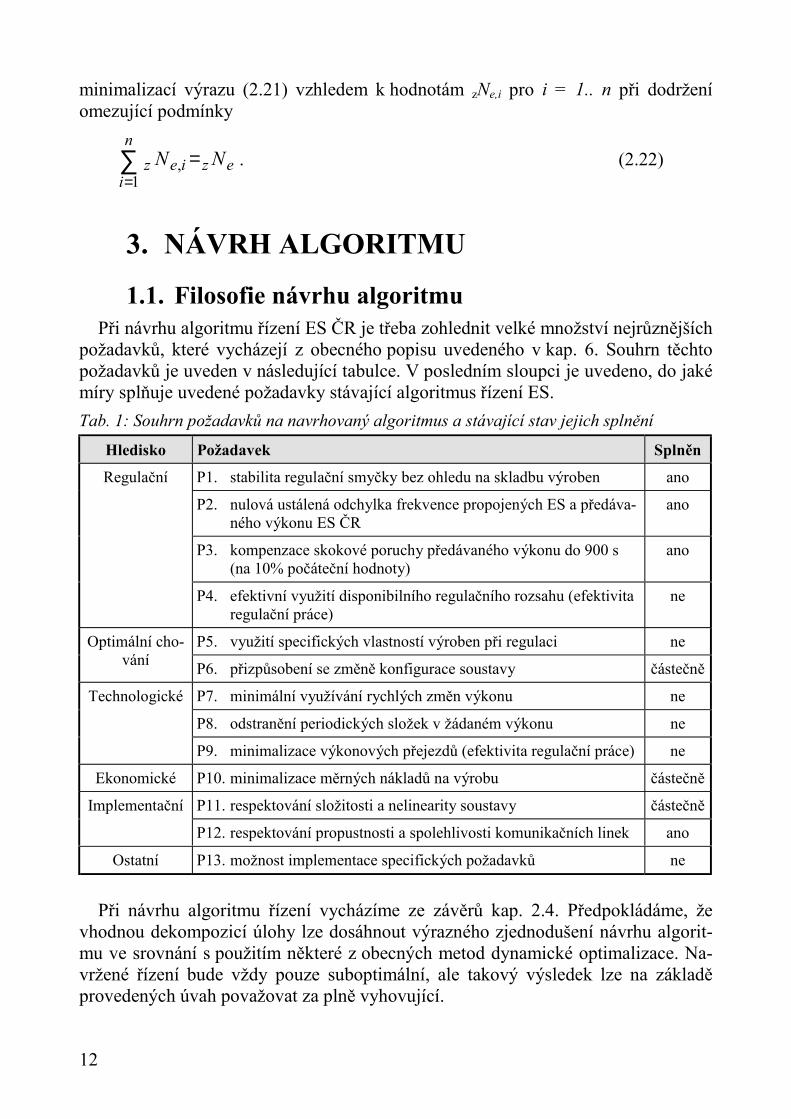
1.1. Filosofie návrhu algoritmuPři návrhu algoritmu řízení ES ČR je třeba zohlednit velké množství nejrůznějších
požadavků, které vycházejí z obecného popisu uvedeného v kap. 6. Souhrn těchtopožadavků je uveden v následující tabulce. V posledním sloupci je uvedeno, do jakémíry splňuje uvedené požadavky stávající algoritmus řízení ES.Tab. 1: Souhrn požadavků na navrhovaný algoritmus a stávající stav jejich splnění
Hledisko Požadavek Splněn
P1. stabilita regulační smyčky bez ohledu na skladbu výroben ano
P2. nulová ustálená odchylka frekvence propojených ES a předáva-ného výkonu ES ČR
ano
P3. kompenzace skokové poruchy předávaného výkonu do 900 s(na 10% počáteční hodnoty)
ano
Regulační
P4. efektivní využití disponibilního regulačního rozsahu (efektivitaregulační práce)
ne
P5. využití specifických vlastností výroben při regulaci neOptimální cho-vání P6. přizpůsobení se změně konfigurace soustavy částečně
P7. minimální využívání rychlých změn výkonu ne
P8. odstranění periodických složek v žádaném výkonu ne
Technologické
P9. minimalizace výkonových přejezdů (efektivita regulační práce) ne
Ekonomické P10. minimalizace měrných nákladů na výrobu částečně
P11. respektování složitosti a nelinearity soustavy částečněImplementační
P12. respektování propustnosti a spolehlivosti komunikačních linek ano
Ostatní P13. možnost implementace specifických požadavků ne
Při návrhu algoritmu řízení vycházíme ze závěrů kap. 2.4. Předpokládáme, ževhodnou dekompozicí úlohy lze dosáhnout výrazného zjednodušení návrhu algorit-mu ve srovnání s použitím některé z obecných metod dynamické optimalizace. Na-vržené řízení bude vždy pouze suboptimální, ale takový výsledek lze na základěprovedených úvah považovat za plně vyhovující.
13
Požadavky formulované v Tab. 1 vedou jednoznačně k požadavku vícekriteriálníoptimalizace. Tomu také odpovídá formulace kritéria optimality, popsaná v kap. 2.5.Optimalita chování soustavy se vyhodnocuje v každém okamžiku přechodného děje,tedy dynamicky. Zhodnocení regulačních vlastností navrženého algoritmu podlevztahu (2.13) je přitom oceněno pouze vahou α1 < 1. Odchylky od nominálních hod-not se navíc vyskytují ve vztahu (2.13) pouze v první mocnině, zatímco v obvykléformulací kritérií optimality ve druhé mocnině. V důsledku toho má přesná dyna-mická optimalizace akčního zásahu význam pouze v těsné blízkosti stacionárníchstavů soustavy, zatímco v přechodných dějích převažuje vliv ostatních složek krité-ria při současném požadavku stability a robustnosti algoritmu řízení.
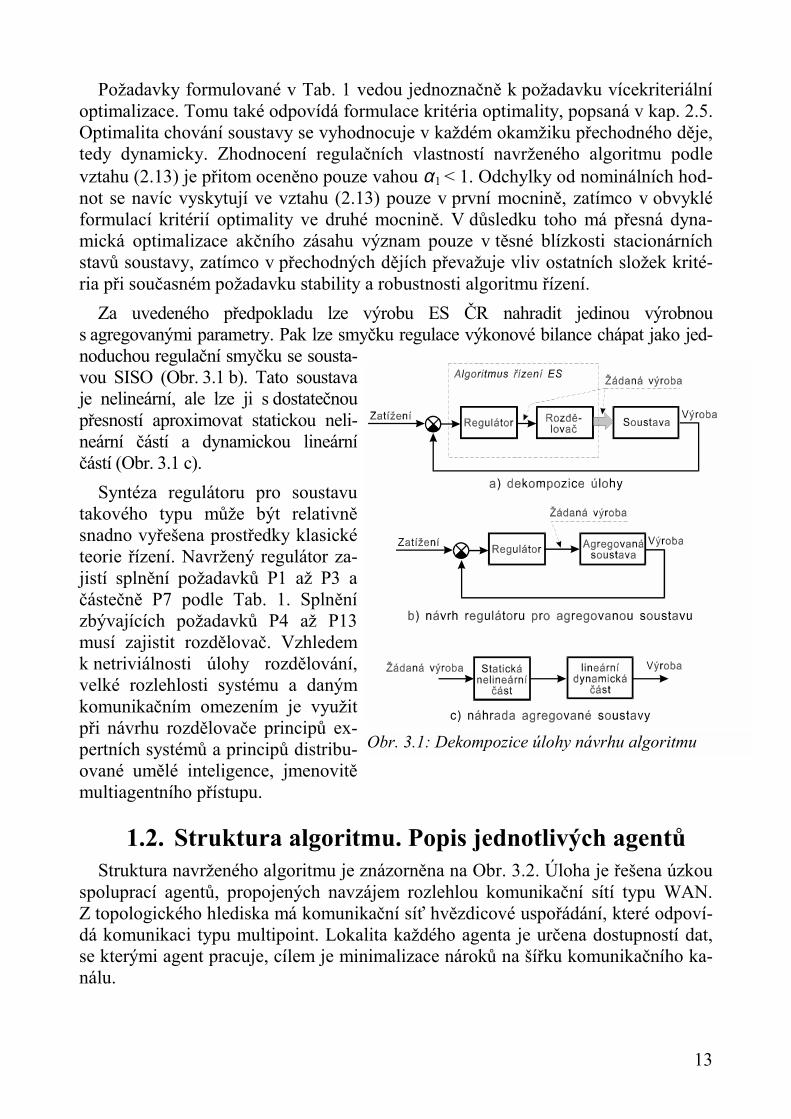
Za uvedeného předpokladu lze výrobu ES ČR nahradit jedinou výrobnous agregovanými parametry. Pak lze smyčku regulace výkonové bilance chápat jako jed-noduchou regulační smyčku se sousta-vou SISO (Obr. 3.1 b). Tato soustavaje nelineární, ale lze ji s dostatečnoupřesností aproximovat statickou neli-neární částí a dynamickou lineárníčástí (Obr. 3.1 c).
Syntéza regulátoru pro soustavutakového typu může být relativněsnadno vyřešena prostředky klasickéteorie řízení. Navržený regulátor za-jistí splnění požadavků P1 až P3 ačástečně P7 podle Tab. 1. Splněnízbývajících požadavků P4 až P13musí zajistit rozdělovač. Vzhledemk netriviálnosti úlohy rozdělování,velké rozlehlosti systému a danýmkomunikačním omezením je využitpři návrhu rozdělovače principů ex-pertních systémů a principů distribu-ované umělé inteligence, jmenovitěmultiagentního přístupu.
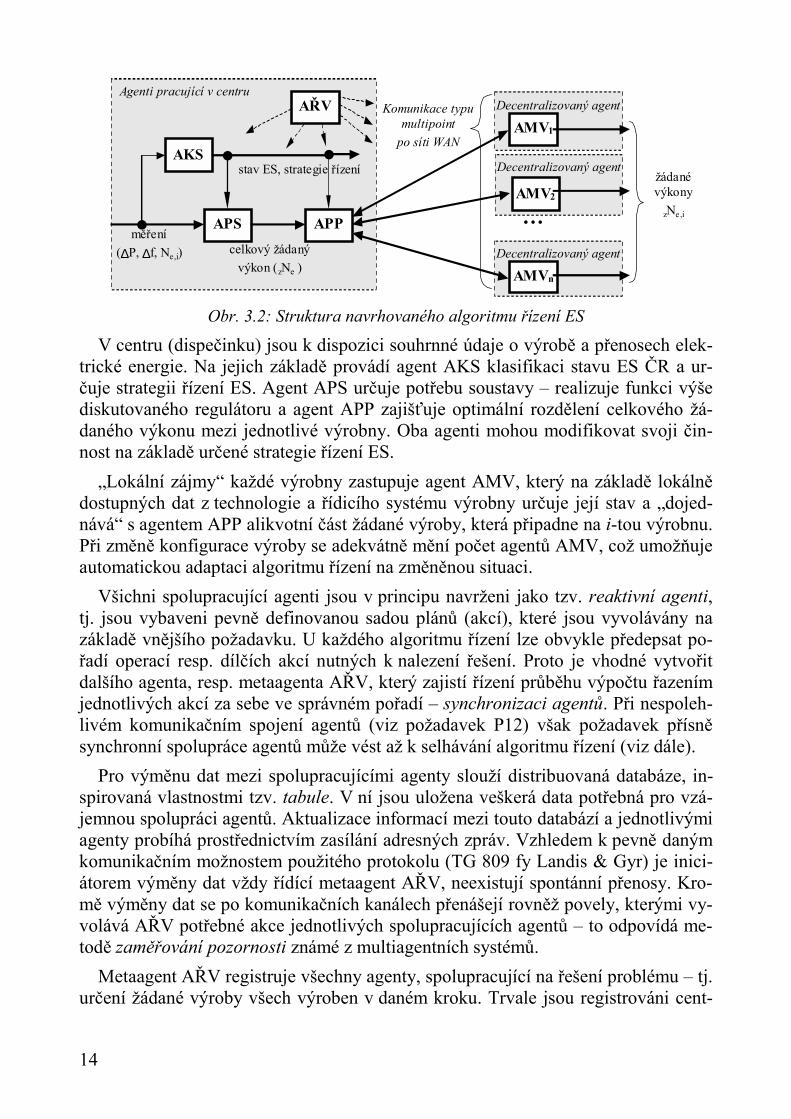
1.2. Struktura algoritmu. Popis jednotlivých agentůStruktura navrženého algoritmu je znázorněna na Obr. 3.2. Úloha je řešena úzkou
spoluprací agentů, propojených navzájem rozlehlou komunikační sítí typu WAN.Z topologického hlediska má komunikační síť hvězdicové uspořádání, které odpoví-dá komunikaci typu multipoint. Lokalita každého agenta je určena dostupností dat,se kterými agent pracuje, cílem je minimalizace nároků na šířku komunikačního ka-nálu.
Obr. 3.1: Dekompozice úlohy návrhu algoritmu
14
Decentralizovaný agent
Decentralizovaný agent
Decentralizovaný agentAgenti pracující v centru
AKS
APS APP
AMV1
AMV2
AMVn
…měření
(∆P, ∆f, Ne,i)
stav ES, strategie řízení
celkový žádanývýkon (zNe )
žádanévýkony
zNe,i
Komunikace typumultipoint
po síti WAN
AŘV
Obr. 3.2: Struktura navrhovaného algoritmu řízení ES
V centru (dispečinku) jsou k dispozici souhrnné údaje o výrobě a přenosech elek-trické energie. Na jejich základě provádí agent AKS klasifikaci stavu ES ČR a ur-čuje strategii řízení ES. Agent APS určuje potřebu soustavy – realizuje funkci výšediskutovaného regulátoru a agent APP zajišťuje optimální rozdělení celkového žá-daného výkonu mezi jednotlivé výrobny. Oba agenti mohou modifikovat svoji čin-nost na základě určené strategie řízení ES.
„Lokální zájmy“ každé výrobny zastupuje agent AMV, který na základě lokálnědostupných dat z technologie a řídicího systému výrobny určuje její stav a „dojed-nává“ s agentem APP alikvotní část žádané výroby, která připadne na i-tou výrobnu.Při změně konfigurace výroby se adekvátně mění počet agentů AMV, což umožňujeautomatickou adaptaci algoritmu řízení na změněnou situaci.
Všichni spolupracující agenti jsou v principu navrženi jako tzv. reaktivní agenti,tj. jsou vybaveni pevně definovanou sadou plánů (akcí), které jsou vyvolávány nazákladě vnějšího požadavku. U každého algoritmu řízení lze obvykle předepsat po-řadí operací resp. dílčích akcí nutných k nalezení řešení. Proto je vhodné vytvořitdalšího agenta, resp. metaagenta AŘV, který zajistí řízení průběhu výpočtu řazenímjednotlivých akcí za sebe ve správném pořadí – synchronizaci agentů. Při nespoleh-livém komunikačním spojení agentů (viz požadavek P12) však požadavek přísněsynchronní spolupráce agentů může vést až k selhávání algoritmu řízení (viz dále).
Pro výměnu dat mezi spolupracujícími agenty slouží distribuovaná databáze, in-spirovaná vlastnostmi tzv. tabule. V ní jsou uložena veškerá data potřebná pro vzá-jemnou spolupráci agentů. Aktualizace informací mezi touto databází a jednotlivýmiagenty probíhá prostřednictvím zasílání adresných zpráv. Vzhledem k pevně danýmkomunikačním možnostem použitého protokolu (TG 809 fy Landis & Gyr) je inici-átorem výměny dat vždy řídící metaagent AŘV, neexistují spontánní přenosy. Kro-mě výměny dat se po komunikačních kanálech přenášejí rovněž povely, kterými vy-volává AŘV potřebné akce jednotlivých spolupracujících agentů – to odpovídá me-todě zaměřování pozornosti známé z multiagentních systémů.
Metaagent AŘV registruje všechny agenty, spolupracující na řešení problému – tj.určení žádané výroby všech výroben v daném kroku. Trvale jsou registrováni cent-
15
rální agenti AKS, APS a APP, každý z nich v jediné instanci (kopii). Agenti typuAMVi jsou registrováni ve více instancích – po jedné pro každou výrobnu. Je-li za-řazena nová výrobna do systému regulace, respektive je z něj vyřazena, dojdek registraci nové instance agenta AMV resp. uvolnění instance agenta, která nebudedále používána. To umožňuje navrženému algoritmu přirozenou adaptaci na změnykonfigurace ES.
Všichni spolupracující agenti mají standardní rozhraní, kterým „maskují“ svojivnitřní strukturu. Toto rozhraní umožňuje:! registraci agenta, zahájení činnosti (New),! ukončení činnosti agenta (Delete) a! vyvolání akce.
Každý agent implementuje určitou minimální sadu akcí, která umožňuje jednodu-ché zajištění správné posloupnosti zpracování jednoho kroku algoritmu. Jsou to:! příprava agenta k novému kroku regulace (akce Reset),! vstup lokálně dostupných dat z technologického procesu (akce Input) a! výstup lokálních akčních zásahů do technologického procesu (akce Output).
Kromě těchto standardních akcí mají jednotlivé typy agentů implementovány dal-ší, pro ně specifické akce, které se rovněž volají přes standardní rozhraní agenta:! Agent AKS:
Akce Classify: Klasifikace stavu ES ČR a tomu odpovídající strategie řízení. Stav ESje charakterizován lingvistickými proměnnými úroveň poruch a typ poruchy.
! Agent APS:Akce Request: Určení celkového zadaného výkonu všech výroben v ES ČR. Ur-
čuje se potřeba ES na základě regulovaných veličin ∆f a ∆P. Potřeba vstu-puje jako regulační odchylka do regulátoru – vzhledem k vlastnostem sou-stavy a charakteru nelinearit je použit robustně navržený regulátor typu I.Stabilita regulační smyčky v přítomnosti nelinearit je dostatečně zajištěnaochranou proti přebuzení (anti-windup).
! Agent APP:Akce Distribute: Rozdělení celkového zadaného výkonu mezi jednotlivé výrobny
na základě jejich okamžitých možností (agent AMVi) a v souladu s určenoustrategií řízení (agent AKS). Používá se kombinace rozdělování optimálníhoz hlediska rychlosti kompenzace poruchy a z hlediska minimalizace měrnýchnákladů na výrobu. Pro nalezení absolutního minima měrných nákladů bylnavržen rychlý heuristický algoritmus.
! Agent AMV:Akce Space: Určení prostoru zadaných výkonů dostupného v tomto kroku řízení
– závisí na typu, vlastnostech a okamžitém stavu výrobny – základ pro čin-nost agentů APS a APP.
16
Akce Propose: Nabídka měrných nákladů výrobny pro tento krok řízení – základpro ekonomickou optimalizaci (agent APP).
Akce Final: Kontrola zadaného výkonu výrobny a jeho realizace.
Popsaný polymorfismus agentů (skrytí různorodosti za jednotné rozhraní) umož-ňuje metaagentu AŘV řídit činnost jemu podřízených agentů jednoduchým způso-bem, který je závislý pouze na vnitřní logice řešené úlohy a struktuře navrženéhospolečenství agentů, ale je naprosto nezávislý na počtu spolupracujících agentůa jejich vnitřních algoritmech. Vlastní algoritmus metaagenta AŘV lze popsat násle-dujícím způsobem:1. Vyvolej akce agenta AKS – Reset, Input, Classify a Output.2. Vyvolej akce všech agentů AMVi – Reset, Input, Space a Propose.3. Vyvolej akce agenta APS – Reset, Input, Request a Output.4. Vyvolej akce agenta APP – Reset, Input, Distribute a Output.5. Vyvolej akce všech agentů AMVi – Final a Output.
Při propojení agentů pomocí komunikačních linek se sníženou spolehlivostía propustností (požadavek P12) může dojít k tomu, že některé rámce se ztratí nebonejsou doručeny včas. V takovém případě zůstává v databázi – tabuli poslednísprávný údaj do doby, než je požadovaná informace korektně přenesena. Podobná jesituace při přenosu povelů k vyvolání akce vzdáleného agenta. V obou případechmají občasné výpadky rámců z dynamického hlediska stejný vliv, jako dopravnízpoždění s proměnnou délkou – při nárůstu zpoždění nad určitou mez mohou vést ažk nestabilitě regulační smyčky.
Pro tento případ je navržen alternativní mechanismus synchronizace agentů – jed-notlivé akce jsou synchronizovány od zdroje reálného času lokálního počítače, naněmž je konkrétní agent implementován. V tom případě je perioda spouštění všechagentů vždy správná, nicméně není možné zaručit korektní posloupnost operací po-psanou výše. Pokud dojde ke změnám v pořadí volání agentů, projeví se to jakoproměnné dopravní zpoždění o maximální délce rovné dvěma periodám vzorkováníh. Tak je velikost parazitního dopravního zpoždění shora omezena a lze ji zohlednitpři syntéze regulátoru v rámci agenta APS.
1.3. Volba periody vzorkováníPředpokládejme, že je navržený algoritmus implementován centrálně, v jediném
výpočetním procesu a s jediným synchronním vzorkováním, které trvá nekonečněkrátkou dobu. Perioda vzorkování h musí být volena >∈< maxmin , hhh . Volbu pe-riody vzorkování ovlivňují především následující faktory:! Spektrum vstupních signálů
Ve spektru vzorkovaných vstupních signálů F*(jω) musí být obsaženy všechnysložky, ovlivňující stabilitu uzavřené regulační smyčky, nicméně je zbytečné
17
přenášet nepotřebné „vysokofrekvenční“ složky. Tím je určen základní intervalpro volbu periody vzorkování.
ních signálů (akčních zásahů) odpovídající ekvivalentnímu dopravnímu zpožděnío velikosti h/2. Tato hodnota musí být přiměřeně malá, aby neovlivňovala stabi-litu a robustnost regulační smyčky – v takovém případě ji lze zohlednit při návr-hu regulátoru.
! Konečná numerická přesnost výpočtuV navrženém algoritmu jsou použity první diference procesních hodnot.
V důsledku konečné přesnosti výpočetní jednotky (CPU) řídicího systému,v němž je algoritmus implementován, je nutné dodržet periodu vzorkování h vět-ší než určité minimum, chceme-li dosáhnout zaručené relativní přesnosti výpočtutéto diference. Pro hodnoty veličin, vyskytující se v navrhovaném algoritmu vy-chází perioda vzorkování h ≥ 2 s.
Vzhledem ke struktuře navrženého algoritmu je nutné zvážit i případné důsledkyspeciálních typů vzorkování:! Vliv konečné doby vzorkování lze bezezbytku zanedbat vzhledem k velmi dob-
rým dynamickým vlastnostem použitých technických prostředků (zejména A/Da D/A převodníků).
! Asynchronní vzorkování hraje významnou roli v důsledku konečné doby výpočtua metody synchronizace agentů (viz diskuse výše).
Použití různých period vzorkování pro vstupní (měřené) a výstupní (akční)signály umožňuje realizovat řadu doplňkových efektů:
Při m-násobně rychlejším vzorkování vstupních signálů je možné provádětúčinnou filtraci šumu ze vstupních signálů a akumulaci více vzorků signálů prourčení potřebných derivací resp. diferencí. V důsledku omezení daného konečnoupřesností výpočtu a v důsledku předpokládané malé kapacity přenosových linekje však nutné implementovat tyto funkce přímo v ŘS výroben resp. na úrovniagentů AMVi. Z hlediska navrženého algoritmu jako celku jsou důsledky takové-ho uspořádání stejné jako při běžném vzorkování s jedinou periodou h.
Při m-násobně rychlejším vzorkování výstupních signálů lze vhodným tvaro-váním akčního zásahu mezi dvěma vzorky vstupních signálů dosáhnout např.lepšího řízení vnitřních stavů jednotlivých řízených subsystémů. Důsledkem mů-že být např. regulace bez překmitu apod. Vzhledem k propustnosti linek a exis-tenci nelineárních omezení (zejména omezení rychlosti zatěžování výroben) všakbude v konkrétním případě regulace ES ČR efekt minimální.
Na základě výše popsaných úvah lze určit přípustný rozsah periody vzorkováníh∈ <2; 30> s. Za optimální hodnotu lze považovat h = 5 s. Tato perioda je společná
18
pro vzorkování vstupů i výstupů všech agentů v centru i na výrobnách. Speciálnímetody vzorkování lze jednoznačně zanedbat. Významný vliv na kvalitu regulacemá jedině použitá metoda synchronizace spolupracujících agentů.
2. OVĚŘENÍ ALGORITMU
2.1. Implementace algoritmuAlgoritmus popsaný v předcházející kapitole byl ověřen na zjednodušeném mo-
delu dvou propojených elektrizačních soustav – ES ČR a ES UCPTE (viz Obr. 4.1).Celý model i navržený algoritmus byly implementovány v prostředí programovéhobalíku MATLAB V5.2 (The MathWorks, Inc.) s tím, že vlastní algoritmus řízení ESČR byl implementován v jazyce C++ v prostředí Visual C++ V5.0 (Microsoft).
Implementace vlastního algoritmu řízení využívá technologie objektově-orientovaného, událostmi řízeného programování s podporou základních datovýchtypů, které umožňují modelovat některé vlastnosti obvyklých inferenčních mecha-nismů. Tak jsou modelovány základní a nejvýznamnější vlastnosti, určující chovánínavrženého algoritmu.
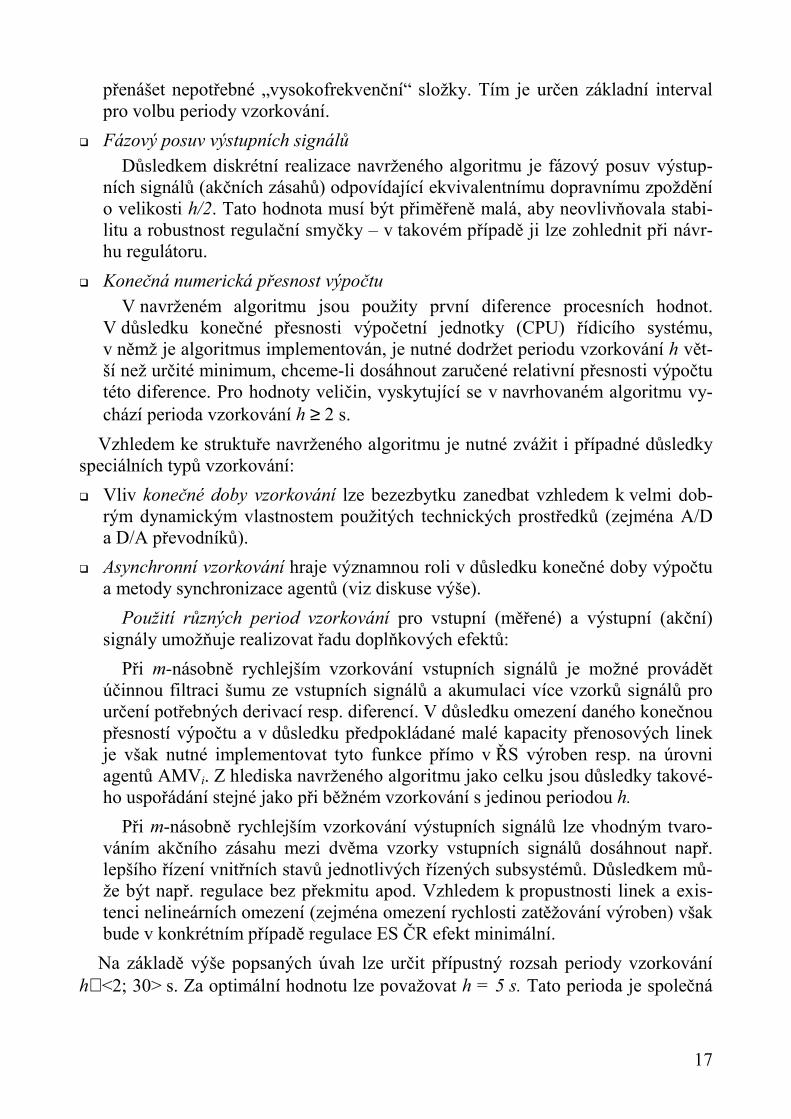
Struktura implementace navrženého algoritmu je znázorněna na Obr. 2.1. Celý al-goritmus je implementován jako jediný uživatelský funkční blok programu SIMU-LINK. Nejvyšší úroveň je tvořena rozhraním mezi vlastní implementací algoritmua simulačním jádrem MATLABu – jedná se o plnou implementaci tzv. S-funkce,úroveň 2. Obě výše popsané metody řízení společenství agentů jsou modeloványv rámci objektu CExpertController, tabule je modelována objektem CDatabase.Objekt CAgent představuje obecné rozhraní reaktivního agenta s přístupem k tabulia schopností provádět akce. Konkrétní algoritmy jednotlivých agentů jsou imple-mentovány s využitím mechanismu dědičnosti a polymorfismu.
19
Legenda:
datové toky
řídicí toky
CAgentCBlokCBlokVE/PE
CAgent
CKlas
CAgent
CReg
CAgent
CRozd
CExpertController
CDatabase:
typy: CHypot
CFcnGen
Interface na MATLAB (S-function, level 2)
Obr. 2.1: Struktura objektů implementovaného algoritmu řízení
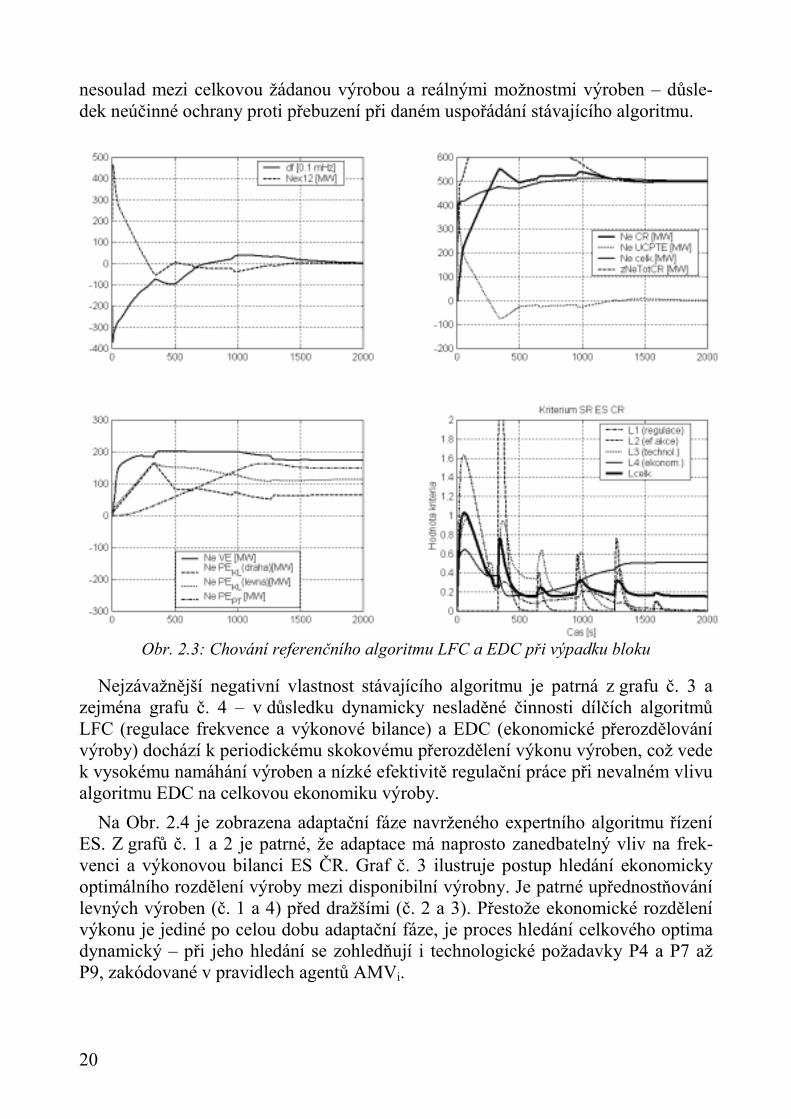
2.2. Vybrané výsledkyNa následujících obrázcích jsou shrnuty vybrané výsledky simulací. Na každém
obrázku je zdokumentován jeden simulační experi-ment. Z důvodu lepší přehlednosti jsou výsledky expe-rimentu rozděleny v rámci jednoho obrázku do čtyřgrafů takto:1. frekvence (z důvodu měřítka v desetinách mHz) a
výkonová bilance ES ČR (v MW, import do ČR jekladný),
2. výkon v ES ČR a UCPTE, celkový výkon obou ES acelkový zadaný výkon z regulátoru ES ČR (vše vMW, odchylka od výchozího stavu),
3. výkony typových výroben v ES ČR (v MW, odchylka od výchozího stavu) a4. hodnoty kritérií (pro snazší posouzení dynamických vlastností jsou zobrazeny
okamžité hodnoty dílčích kritérií definované vztahy (2.13), (2.14), (2.15) a (2.19)a jejich vážený součet – integrand vztahu (2.12).
Na Obr. 2.3 jsou výsledky simulace výpadku výrobny 500 MW při ES ČR řízenéstávajícím algoritmem. Na grafu č. 1 je patrné, že z hlediska požadavků regulačních(P1 až P3) je řízení plně vyhovující. Stávající algoritmus však vede na regulaci frek-vence s překmitem, což vede k neoptimálnímu využití regulační práce – v důsledkučinnosti primární regulace v této situaci všechny spolupracující výrobny v celé ESsnižují svoji výrobu, zatímco výrobny v ES ČR ji stále zvyšují. Z grafu č. 2 je patrný
Graf č. 1
Graf č. 3
Obrázek č. N
Graf č. 2
Graf č. 4
Obr. 2.2: Uspořádání grafův obrázku
20
nesoulad mezi celkovou žádanou výrobou a reálnými možnostmi výroben – důsle-dek neúčinné ochrany proti přebuzení při daném uspořádání stávajícího algoritmu.
Obr. 2.3: Chování referenčního algoritmu LFC a EDC při výpadku bloku
Nejzávažnější negativní vlastnost stávajícího algoritmu je patrná z grafu č. 3 azejména grafu č. 4 – v důsledku dynamicky nesladěné činnosti dílčích algoritmůLFC (regulace frekvence a výkonové bilance) a EDC (ekonomické přerozdělovánívýroby) dochází k periodickému skokovému přerozdělení výkonu výroben, což vedek vysokému namáhání výroben a nízké efektivitě regulační práce při nevalném vlivualgoritmu EDC na celkovou ekonomiku výroby.
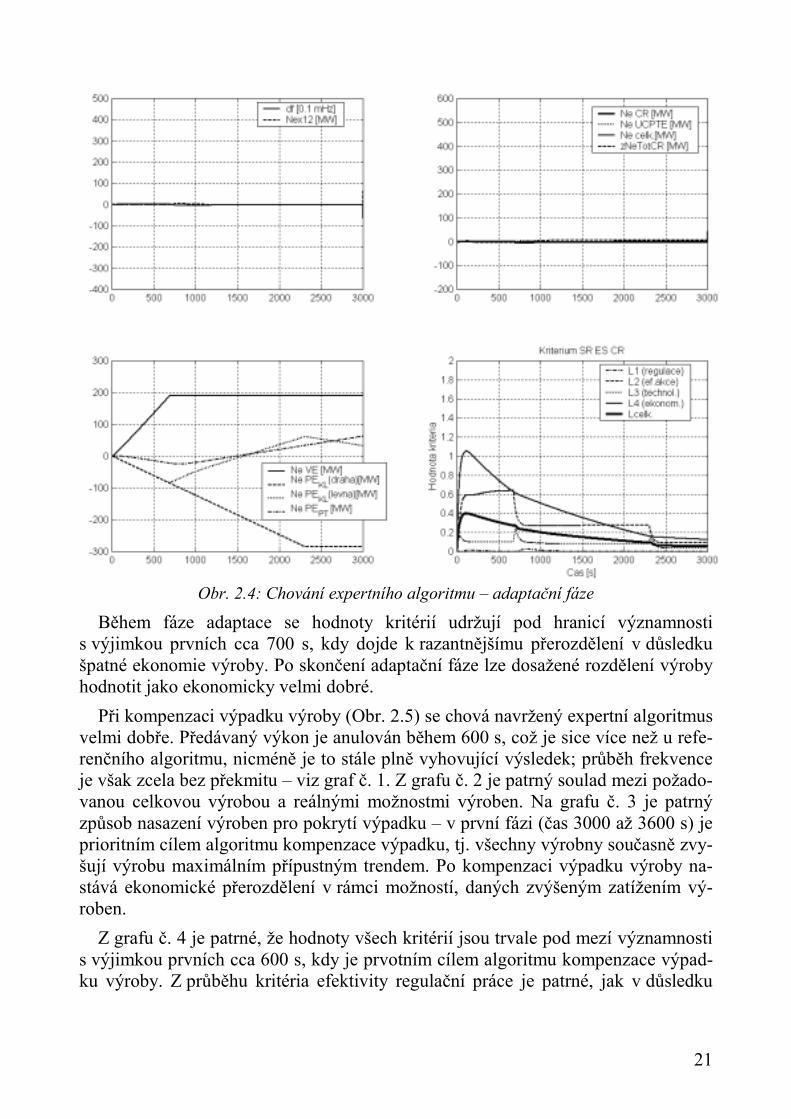
Na Obr. 2.4 je zobrazena adaptační fáze navrženého expertního algoritmu řízeníES. Z grafů č. 1 a 2 je patrné, že adaptace má naprosto zanedbatelný vliv na frek-venci a výkonovou bilanci ES ČR. Graf č. 3 ilustruje postup hledání ekonomickyoptimálního rozdělení výroby mezi disponibilní výrobny. Je patrné upřednostňovánílevných výroben (č. 1 a 4) před dražšími (č. 2 a 3). Přestože ekonomické rozdělenívýkonu je jediné po celou dobu adaptační fáze, je proces hledání celkového optimadynamický – při jeho hledání se zohledňují i technologické požadavky P4 a P7 ažP9, zakódované v pravidlech agentů AMVi.
21
Obr. 2.4: Chování expertního algoritmu – adaptační fáze
Během fáze adaptace se hodnoty kritérií udržují pod hranicí významnostis výjimkou prvních cca 700 s, kdy dojde k razantnějšímu přerozdělení v důsledkušpatné ekonomie výroby. Po skončení adaptační fáze lze dosažené rozdělení výrobyhodnotit jako ekonomicky velmi dobré.
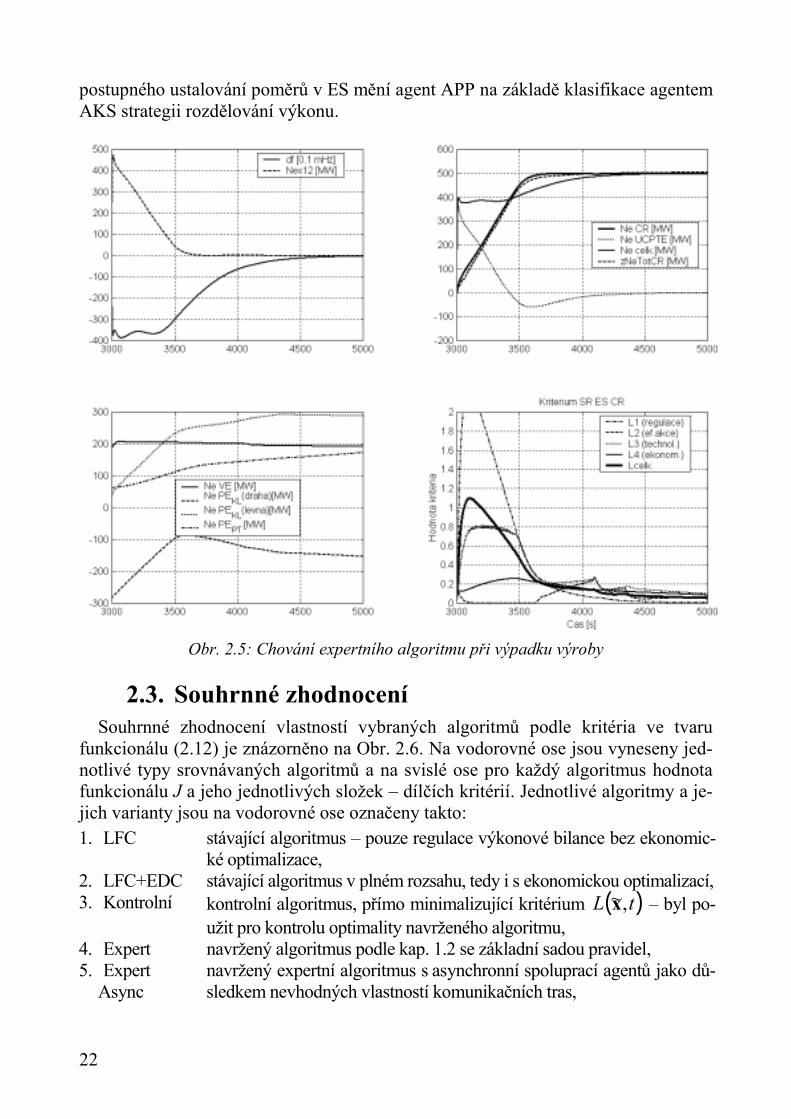
Při kompenzaci výpadku výroby (Obr. 2.5) se chová navržený expertní algoritmusvelmi dobře. Předávaný výkon je anulován během 600 s, což je sice více než u refe-renčního algoritmu, nicméně je to stále plně vyhovující výsledek; průběh frekvenceje však zcela bez překmitu – viz graf č. 1. Z grafu č. 2 je patrný soulad mezi požado-vanou celkovou výrobou a reálnými možnostmi výroben. Na grafu č. 3 je patrnýzpůsob nasazení výroben pro pokrytí výpadku – v první fázi (čas 3000 až 3600 s) jeprioritním cílem algoritmu kompenzace výpadku, tj. všechny výrobny současně zvy-šují výrobu maximálním přípustným trendem. Po kompenzaci výpadku výroby na-stává ekonomické přerozdělení v rámci možností, daných zvýšeným zatížením vý-roben.
Z grafu č. 4 je patrné, že hodnoty všech kritérií jsou trvale pod mezí významnostis výjimkou prvních cca 600 s, kdy je prvotním cílem algoritmu kompenzace výpad-ku výroby. Z průběhu kritéria efektivity regulační práce je patrné, jak v důsledku
22
postupného ustalování poměrů v ES mění agent APP na základě klasifikace agentemAKS strategii rozdělování výkonu.
Obr. 2.5: Chování expertního algoritmu při výpadku výroby
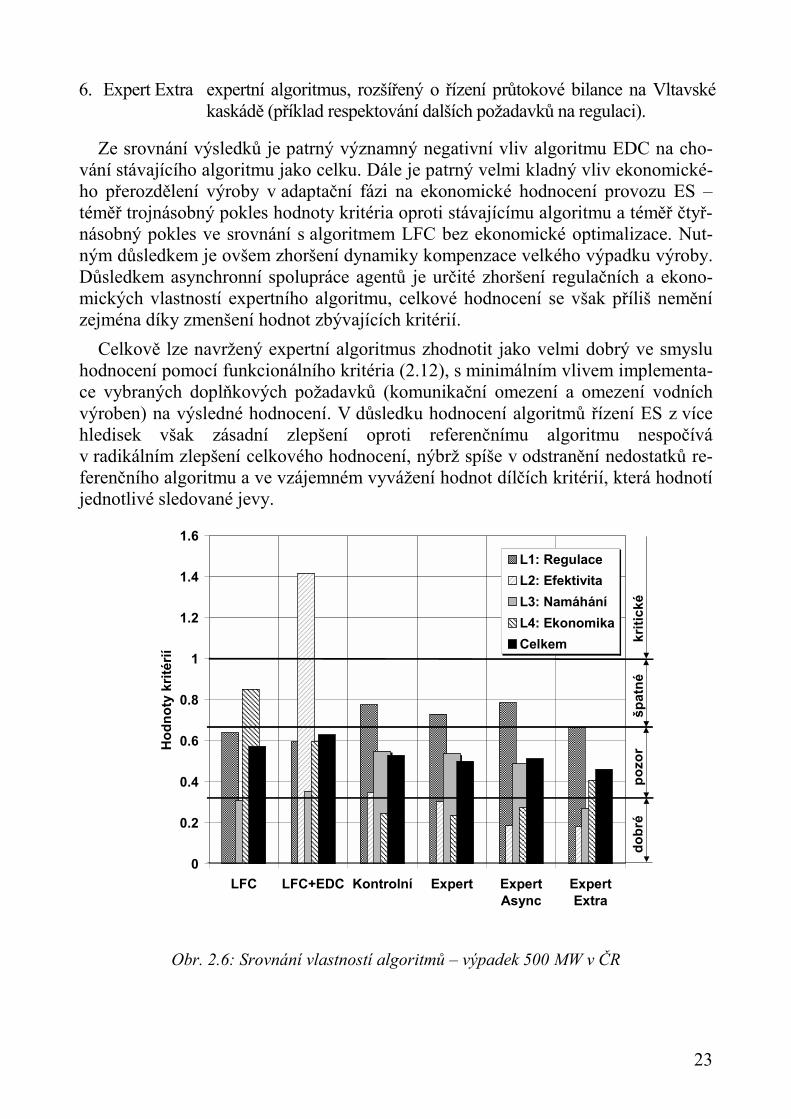
2.3. Souhrnné zhodnoceníSouhrnné zhodnocení vlastností vybraných algoritmů podle kritéria ve tvaru
funkcionálu (2.12) je znázorněno na Obr. 2.6. Na vodorovné ose jsou vyneseny jed-notlivé typy srovnávaných algoritmů a na svislé ose pro každý algoritmus hodnotafunkcionálu J a jeho jednotlivých složek – dílčích kritérií. Jednotlivé algoritmy a je-jich varianty jsou na vodorovné ose označeny takto:1. LFC stávající algoritmus – pouze regulace výkonové bilance bez ekonomic-
ké optimalizace,2. LFC+EDC stávající algoritmus v plném rozsahu, tedy i s ekonomickou optimalizací,3. Kontrolní kontrolní algoritmus, přímo minimalizující kritérium ( )tL ,~x – byl po-
užit pro kontrolu optimality navrženého algoritmu,4. Expert navržený algoritmus podle kap. 1.2 se základní sadou pravidel,5. Expert
Asyncnavržený expertní algoritmus s asynchronní spoluprací agentů jako dů-sledkem nevhodných vlastností komunikačních tras,
23
6. Expert Extra expertní algoritmus, rozšířený o řízení průtokové bilance na Vltavskékaskádě (příklad respektování dalších požadavků na regulaci).
Ze srovnání výsledků je patrný významný negativní vliv algoritmu EDC na cho-vání stávajícího algoritmu jako celku. Dále je patrný velmi kladný vliv ekonomické-ho přerozdělení výroby v adaptační fázi na ekonomické hodnocení provozu ES –téměř trojnásobný pokles hodnoty kritéria oproti stávajícímu algoritmu a téměř čtyř-násobný pokles ve srovnání s algoritmem LFC bez ekonomické optimalizace. Nut-ným důsledkem je ovšem zhoršení dynamiky kompenzace velkého výpadku výroby.Důsledkem asynchronní spolupráce agentů je určité zhoršení regulačních a ekono-mických vlastností expertního algoritmu, celkové hodnocení se však příliš neměnízejména díky zmenšení hodnot zbývajících kritérií.
Celkově lze navržený expertní algoritmus zhodnotit jako velmi dobrý ve smysluhodnocení pomocí funkcionálního kritéria (2.12), s minimálním vlivem implementa-ce vybraných doplňkových požadavků (komunikační omezení a omezení vodníchvýroben) na výsledné hodnocení. V důsledku hodnocení algoritmů řízení ES z vícehledisek však zásadní zlepšení oproti referenčnímu algoritmu nespočíváv radikálním zlepšení celkového hodnocení, nýbrž spíše v odstranění nedostatků re-ferenčního algoritmu a ve vzájemném vyvážení hodnot dílčích kritérií, která hodnotíjednotlivé sledované jevy.
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
LFC LFC+EDC Kontrolní Expert ExpertAsync
ExpertExtra
Hod
noty
krit
érií
L1: Regulace
L2: EfektivitaL3: NamáháníL4: EkonomikaCelkem
dobr
épo
zor
špat
nékr
itick
é
Obr. 2.6: Srovnání vlastností algoritmů – výpadek 500 MW v ČR
24
3. ZÁVĚR
Předložená disertační práce byla věnována možnosti využití některých metoda prostředků umělé inteligence při formulaci algoritmu optimálního řízení extrémněrozlehlé, nelineární regulované soustavy. Úloha byla řešena na konkrétním případěregulace frekvence a výkonové bilance elektrizační soustavy České republikys ohledem na možné zobecnění formulovaných algoritmů na celou třídu podobnýchprůmyslových soustav.
Regulační úlohy tohoto typu jsou řešitelné s použitím některých formulací řešeníobecné úlohy dynamické optimalizace s omezeními akčního zásahu, např. pomocíPontrjaginova principu minima či Bellmanova dynamického programování. Nelinea-rita a nevhodný tvar kritéria optimality, vynucený složitostí a vyvažováním vlivudílčích kritérií při vícekriteriální optimalizaci znemožňuje další zjednodušení úlohydynamické optimalizace. Rozlehlost a složitost řízené soustavy jsou příčinou ex-trémně vysoké výpočetní náročnosti takového algoritmu. Byla proto zvolena cestafunkční i prostorové dekompozice algoritmu řízení, která při zachování suboptima-lity řízení zjednodušuje návrh algoritmu a snižuje jeho celkovou výpočetní nároč-nost.
Navržený algoritmus je založen na principu multiagentních systémů známýchz oblasti distribuované umělé inteligence. Pro algoritmizaci jednotlivých agentů bylydílem využity klasické (tj. exaktní) postupy a dílem heuristická pravidla motivovanámožnostmi expertních systémů. Celý návrh algoritmu byl podřízen základnímu po-žadavku práce v režimu in-line, tj. se vstupem a výstupem všech údajů přímo z/dořízeného technologického procesu bez nutnosti bezprostřední interakces operátorem. Tomuto požadavku je také podřízena formulace algoritmů jednotli-vých agentů.
Vlastnosti navrženého algoritmu byly hodnoceny komplexním kritériem kvality,které zhodnocuje splnění většiny požadavků, kladených na provoz regulované sou-stavy. Byla prověřena možnost rozšiřování navrženého algoritmu o splnění dalšíchpožadavků technologického rázu. Vzhledem k velké rozlehlosti a distribuovanostiregulované soustavy byl testován vliv snížené kvality komunikačních tras na vlast-nosti navrženého algoritmu. Dále byla prověřována i výpočetní náročnost algoritmu.
Navržený algoritmus realizuje suboptimální řízení ve smyslu vícekriteriální opti-mality. Vlastnosti algoritmu lze hodnotit jako velmi dobré, i když zásadní zlepšeníoproti stávajícímu algoritmu nespočívá v radikálním zlepšení celkového hodnocení,nýbrž v odstranění základních nedostatků referenčního algoritmu a ve vzájemnémvyvážení hodnot dílčích kritérií, která hodnotí jednotlivé sledované jevy.
Navržená struktura algoritmu, zejména mechanismus vyjednávání o optimálnímakčním zásahu na i-té podsoustavě, implementované v agentech AMVi a APP na zá-kladě strategie určené agentem AKS umožňuje pružně definovat způsob ošetření
25
jednotlivých požadavků, kladených na algoritmus řízení. Při vhodně stanovené de-kompozici úlohy a z toho plynoucího určení úloh a zodpovědností jednotlivýchagentů ve společenství je formulace algoritmu agenta zastupujícího i-tou podsousta-vu relativně nezávislá na algoritmech ostatních agentů, což umožňuje snazší modifi-kace a rozšiřování již implementovaného algoritmu.
V současné době byl algoritmus za účelem ověření vlastností implementováns využitím technologie objektově orientovaného, událostmi řízeného programovánív běžném, procedurálně orientovaném programovacím jazyce C++. Použitý způsobimplementace zhruba odpovídá předpokládaným vlastnostem multiagentního systé-mu, založeného na kombinaci produkčních pravidel a běžné numerické matematiky.Vlastní formulace pravidel procedurálním způsobem je však, zejména při větším po-čtu pravidel, nepřehledná a složitá bez ohledu na existující datové podpory. Proto jetřeba nalézt existující nebo vyvinout nový prostředek, který umožní popsat strukturuspolečenství i algoritmy jednotlivých agentů jednodušším způsobem.
4. PŘÍLOHA: ELEKTRIZAČNÍ SOUSTAVA
Elektrizační soustava (ES) je extrémně rozlehlá, distribuovaná soustava, která seskládá z:! výroby (elektrárny, teplárny, závodní elektrárny, malé a alternativní zdroje, nezá-
vislí dovozci elektrické energie),! spotřeby (drobní, střední a velcí spotřebitelé – vzhledem k jejich počtu a charak-
teru lze chápat spotřebu jako náhodný proces) a! přenosové soustavy (systém vedení vvn, vn a rozvoden)
Díky synchronnímu propojení ES ČR s ES západoevropských zemí sdruženýchv UCPTE je rozlehlost všech synchronně propojených ES skutečně velká – geomet-ricky je srovnatelná s rozlohou téměř 50% evropského kontinentu. V důsledku tohovznikají uvnitř celé ES velmi komplikované! strategické zájmy jednotlivých partnerských zemí (zejména zajištění soběstač-
nosti regionu, spolehlivosti systému, zotavení z velkých poruch apod.),! vlastnické vztahy (zájmy individuálních vlastníků dílčích objektů ES nejsou ob-
vykle v souladu se zájmy strategickými či technickými – situace se dále kompli-kuje s plánovaným zavedením liberalizace obchodu s elektřinou – tzv. TPA,Third Party Access)
! fyzikální, technické a technologické problémy (základní a nezbytné principya podmínky funkce celého zařízení; předpisy pro zajištění bezpečnosti provozuzařízení a dodržování fyzikálně a technologicky přípustných hodnot základníchveličin)
26
Základním požadavkem na činnost celého systému je v podstatě uspokojení kon-krétní energetické potřeby, tedy vyrovnaná výkonová bilance celé ES. Při uváženívšech dalších omezení a požadavků není v některých případech základní cíl řízenídosažitelný – úloha řízení v celé komplexnosti nemá řešení. V takovém případě sehledá řešení v podobě optimálního kompromisu.
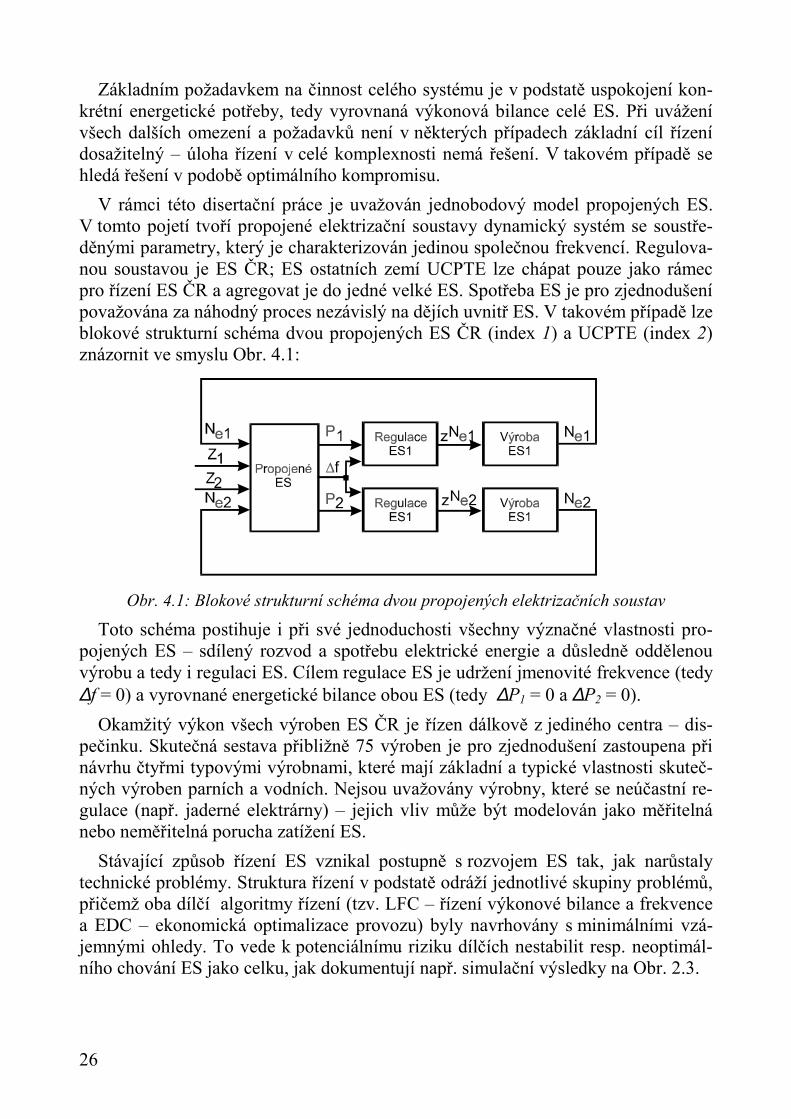
V rámci této disertační práce je uvažován jednobodový model propojených ES.V tomto pojetí tvoří propojené elektrizační soustavy dynamický systém se soustře-děnými parametry, který je charakterizován jedinou společnou frekvencí. Regulova-nou soustavou je ES ČR; ES ostatních zemí UCPTE lze chápat pouze jako rámecpro řízení ES ČR a agregovat je do jedné velké ES. Spotřeba ES je pro zjednodušenípovažována za náhodný proces nezávislý na dějích uvnitř ES. V takovém případě lzeblokové strukturní schéma dvou propojených ES ČR (index 1) a UCPTE (index 2)znázornit ve smyslu Obr. 4.1:
Obr. 4.1: Blokové strukturní schéma dvou propojených elektrizačních soustav
Toto schéma postihuje i při své jednoduchosti všechny význačné vlastnosti pro-pojených ES – sdílený rozvod a spotřebu elektrické energie a důsledně oddělenouvýrobu a tedy i regulaci ES. Cílem regulace ES je udržení jmenovité frekvence (tedy∆f = 0) a vyrovnané energetické bilance obou ES (tedy ∆P1 = 0 a ∆P2 = 0).
Okamžitý výkon všech výroben ES ČR je řízen dálkově z jediného centra – dis-pečinku. Skutečná sestava přibližně 75 výroben je pro zjednodušení zastoupena přinávrhu čtyřmi typovými výrobnami, které mají základní a typické vlastnosti skuteč-ných výroben parních a vodních. Nejsou uvažovány výrobny, které se neúčastní re-gulace (např. jaderné elektrárny) – jejich vliv může být modelován jako měřitelnánebo neměřitelná porucha zatížení ES.
Stávající způsob řízení ES vznikal postupně s rozvojem ES tak, jak narůstalytechnické problémy. Struktura řízení v podstatě odráží jednotlivé skupiny problémů,přičemž oba dílčí algoritmy řízení (tzv. LFC – řízení výkonové bilance a frekvencea EDC – ekonomická optimalizace provozu) byly navrhovány s minimálními vzá-jemnými ohledy. To vede k potenciálnímu riziku dílčích nestabilit resp. neoptimál-ního chování ES jako celku, jak dokumentují např. simulační výsledky na Obr. 2.3.
27
Seznam použitého značeníVeličina Jednotka Popis
∆f Hz Odchylka frekvence v propojených ES od jmenovité hodnoty.
Ne MW Skutečný elektrický výkon výrobny/ES.
zNe MW Zadaný elektrický výkon výrobny/ES.
Nmin MW Minimální výkon výrobny/ES.
Nmax MW Maximální výkon výrobny/ES.
∆P MW Odchylka předávaného výkonu ES ČR od zadané hodnoty(respektuje sjednaný import/export).
ACE MW Tzv. potřeba ES (Area Control Error).
νi MW.s-1 Omezení rychlosti zatěžování i-té výrobny: iezi N ,max !=ν Přípustný
rozsah rychlosti změny výkonu je >+−∈< iiiez N νν ,,!
ζi MW.s-2Omezení zrychlení zatěžování i-té výrobny: iezi N ,max !!=ζ
Přípustný rozsah změny rychlosti zatěžování je >+−∈< iiiez N ζζ ,,!!
Literatura[1] Findura, M. – Polák, P.: Optimalizace algoritmů SR pro ÚD ČEZ. Etapa E31
a E32. Výzkumná zpráva č. TZ 1113/3000, ORGREZ SC, a.s., Brno, 1998.[2] Findura, M.: Řízení rozlehlého nelineárního systému na bázi metod a pro-
[3] Findura, M.: TACIS Project - Dynamic Power Plant Modelling. Výzkumnázpráva č. 1085/3000, ORGREZ SC, a.s., Brno, 1998.
[4] Kubík, S. – Kotek, Z. a kol.: Teorie automatického řízení (2 díly). SNTL, Pra-ha, 1982.
[5] Mařík, V. – Štěpánková, O. – Lažanský, J. a kol.: Umělá inteligence (2 díly).Academia, Praha, 1993.
[6] Schlegel, M. – Chladová, K.: Regulátor Smithova typu – regulátor pro obtížněregulovatelné systémy. Automatizace roč. 38, 1995, č. 12, pp. 471–475.
[7] The MathWorks, Inc.: MATLAB Version 5 – Optimization Toolbox – User‘sGuide. The MathWorks, Inc., Natick, MA, USA, 1997.
[8] Vavřín, P. – Zelina, F.: Automatické řízení počítačem. SNTL, Praha, 1982.[9] Zieliński, Z.: Próby zdolności regulacyjnej wydzielonych systemów elektroe-
nergetycznych CENTREL i VEAG w dynamicznych i statycznych stanachpracy. Výzkumná zpráva CENTREL, Wrocław, 1993.
28
5. SUMMARY
There is a significant number of large-scale, complex and distributed plants in theindustry that are to be optimally controlled from a single dispatch centre. A range ofindustrial networks, water-, gas-, oil- and power-mains fits into this category. Thoseplants usually consist of a large number (tens and often more) of local subsystemsconnected, bound and affecting each other via the physical coupling correspondingto the power or mass flow among the individual subsystems. The automatic controlof such a complex plant is a non-trivial task mainly because of the complexity ofgoals for optimal control and the difficulty of their dynamic co-ordination.
Power system is a typical plant of this type. The PhD thesis is focused on synthe-sis of an algorithm of sub-optimal load and frequency control of the Czech PowerSystem using some means and methods of distributed AI. Simulation was used toassess the behaviour of the designed and current algorithms and to compare theirproperties.
5.1. Power system and its controlPower system (PS) is an extremely large-scale, distributed plant that consists of the:
! production (power plants, heating plants and other sources),! consumption (a big number of consumers whose influence can be qualified as an
stochastic process) and! distribution system (tie lines and substations).
Due to the synchronous interconnection of the Czech PS to the PS of the UCPTEcountries is the scope of the PS really large – it covers about a half of the Europeancontinent. As a result, in the PS there are very complicated! strategic interests (e.g. self-sufficiency of a country),! ownership relations (profit against strategic interests and technological limita-
tions, free power market etc.),! physical, technical and technological problems (principles and conditions of the
PS functioning, allowable tolerances on basic quantities etc.).The primary goal of the PS control is the coverage of the power consumption –
that means balanced production and consumption and retaining the PS frequencywithin its limits in every moment. Further goals comprise mainly the minimizationof the direct production costs and additional costs induced by the PS equipment ex-ploitation – e.g. repair and maintenance costs etc. – these are generally technologicalrequirements which minimize the lifetime usage of the installed equipment, complyto the ecological and other measures.
Power balance of the Czech PS is controlled from the Central Dispatch Centre(CDC). The so called Secondary Control (SC) algorithms are implemented in the
29
CDC control system and accomplish the above stated control goals. The SC algo-rithms are split into two main parts – the Load and Frequency Control (LFC) dy-namically balances the power generation while the Economic Dispatch Control(EDC) performs the economic optimisation.
Power balance and frequency are very closely coupled together with a small timeconstant. Therefore, most of the generating units are equipped with fast acting con-trol system of Primary Control (PC) of frequency. This control system ensures thefrequency deviations trends to stop after a few second after the imbalance, before theSC starts acting.
5.2. Control algorithm synthesisThe synthesis of the optimal control of a dynamic system is usually achieved using
the variation calculus. In the case of the PS control it is not possible to use any preparedmethods of synthesis due to the complexity of optimisation goals and technologicallimitations. Some general methods may ensure stability and optimality of the controlbut they generally lead to a solution of a non-linear matrix differential equation in everystep of the control algorithm. Large scale of the PS causes very high order of the equa-tion, even when massive aggregation and simplification has been performed. As a re-sult, the control synthesis task can’t be practically accomplished this way.
The PhD thesis proposes an algorithm providing a sub-optimal control of the PSusing some methods and means of the AI, namely the multi-agent approach. The al-gorithm is based on a control task de-composition according to Fig. 3.1 b). Providedthat the controlled subsystems have certain properties (which industrial plants usu-ally have), the control algorithm can be split into two relatively independent parts:The Controller calculates the total PS generation setpoint to maintain the stable, bal-anced and robust power generation. The Distributor distributes the total setpointamong the individual units while complying with the above mentioned economic,technological and other requirements of optimality. The contradicting requirementsare co-ordinated using the theoretical basis of static multi-objective optimisation. Adramatic speed-up of the optimisation algorithm was achieved using a heuristic al-gorithm based on production rules.
The structure of the control algorithm is shown in Fig. 3.2. The individual controlagents co-operate closely to accomplish the control task. They are interconnectedusing a wide area network with the multi-point communication protocol. Eachagent’s locality is given by the agent’s necessary data availability; the objective is tominimize the requirements for the communication channel bandwidth.
There are cumulative production and transmission data available at the CDC.Based on that, the AKS agent classifies the PS state and proposes the control strategyor primary goal (e.g. imbalance elimination). The APS agent implements the above-mentioned Controller, the APP agent implements the Distributor. Both agents mod-ify their algorithms based on the proposed control strategy.
30
The AMV agents deputize the “local interests” of the individual units. They esti-mate the internal state of the unit from the data transmitted from the plant’s technol-ogy and control system. Then they propose and negotiate the unit’s output with theAPP agent. In this way the unit’s individual long-term and short-term properties canbe incorporated into the global control algorithm in a very transparent way. After re-configuration of the PS a new AMV agent instance is created or an old one is re-leased to mirror the actual generation structure. This leads to a natural adaptation ofthe performance of the algorithm.
All co-operating agents are principally reactive agents, i.e. they can perform a de-fined set of actions that can be invoked on the basis of an external request. The co-ordinator of the control process is the ARV meta-agent. The data exchange is accom-plished by using a distributed database inspired by the blackboard properties and asystem of addressed messages. In addition to the data messages, also the agent syn-chronization (or action invoking) messages are transmitted through the communicationnetwork. As a part of synthesis, an alternative “asynchronous” co-ordination methodwas proposed for the case of extremely low network bandwidth and transfer reliability.
5.3. Simulation resultsThe above-described algorithm was verified and compared to the current algo-
rithm using a simplified dynamic model of the Czech PS. Some of the results areshown in Fig. 4.3 to 4.6. The results correspond to the 500 MW outage eliminationin the Czech PS controlled by the current (Fig. 4.3) and designed algorithms(Fig. 4.4, 4.5). To achieve better readability of the series, the results are shown infour charts within one figure according to Fig. 4.2:1. frequency and power balance of the Czech PS,2. total generation of each PS, their sum and total generation setpoint of the Czech PS,3. generation of four typical generating units in the Czech PS, and4. instant values of the individual objective (goal) functions and their aggregated
value (smaller values are better, the margin of relevance being 0.33).The simulation results for the current control algorithm are shown in Fig. 4.3. The
power imbalance has been eliminated much sooner than the required limit 900 s(chart 1). However, there is an over-swing of the frequency signal. This means anon-optimal utilization of the control power. Because of the primary control allpower plants within the interconnected PS’s would decrease their generation whilethe Czech ones would still increase it. In the chart 2, you can see the discrepancybetween the total setpoint and generation – a result of an inefficient anti-windupcaused by the structure of the current algorithm. The worst result is apparent incharts 3 and 4: as a result of uncoordinated LFC and EDC sub-algorithms, a periodi-cal step re-distribution of the units’ setpoints occurs, and causes big and unnecessarystrain to the technology while the influence on the economics is fairly small.
31
The designed algorithm produces more favourable results. The algorithm’s abilityto find the economically optimal re-distribution of the generation during an adapta-tion phase is documented in Fig. 4.4. Fig. 4.5 documents the behaviour during con-sequent outage. The outage has been eliminated within 600 s – more then in the pre-vious case but always within the required limit. There is no over-swing on the fre-quency signal (see chart 1). The total setpoint is harmonized with the momentaneouscapabilities of the generating units (chart 2). Chart 3 documents the strategy of out-age elimination: in the first phase, the primary goal is to compensate for the outage –all units increase their generation using the maximal trend until they reach their lim-its or the outage has been covered. In the second phase, the primary goal becomesthe economics and overall optimization of the currently achieved generation distri-bution. It can be seen in chart 4, that all values of the objective functions remainbelow the margin of relevance, except the first 600 s when the primary goal is thepower imbalance elimination. The values of the objective function assessing thecontrol power utilization effectiveness (series 2) documents the changing controlstrategy: When the PS slowly approaches its steady state (classified by the AKSagent), the APP agent gradually starts to use the economic re-distribution rules, nec-essarily causing some control power ineffectiveness.
5.4. ConclusionIn the PhD thesis, a control algorithm for the power balance and frequency control
of the Czech PS was designed. This algorithm ensures sub-optimal control of the PSwhile considering quite complex requirements for the optimal behaviour. The de-signed algorithm was tested on a dynamic model. The simulation results have shownthat the proposed algorithm performs better than the currently used algorithm in thesense of multi-objective optimisation. The main advantage of the designed algorithmis the possibility of relatively easy harmonization of the technological, economical,control and other requirements for the PS control. The experiments promise an easyextendibility of the algorithm to other large-scale systems mentioned in the intro-duction.