KMA/ZM1 Pˇ redn´ aˇ sky RNDr. Blanka ˇ Sediv´ a, PhD. Katedra matematiky FAV Z´ apadoˇ cesk´a univerzita v Plzni [email protected]Obsah 0.1 Matematick´ e objekty, matematick´ e definice, matematick´ e vˇ ety .............. 4 1 Mnoˇ zina a operace s mnoˇ zinami 5 1.1 Definice z´ akladn´ ıch mnoˇ zinov´ ych pojm˚ u .......................... 5 1.2 ˇ C´ ıseln´ e mnoˇ ziny ........................................ 5 1.3 Intervaly ............................................ 7 1.4 Operace s mnoˇ zinami, V´ ennovy diagramy .......................... 7 1.5 Omezenost mnoˇ zin, maximum a minimum mnoˇ ziny, supremum a infimum mnoˇ ziny ... 9 1.6 Pˇ rehled pouˇ z´ ıvan´ ych symbol˚ u ................................ 13 2 Posloupnosti re´ aln´ ych ˇ c´ ısel 14 2.1 Definiceposloupnosti,zad´av´an´ ı posloupnosti, graf posloupnosti, operace s posloupnostmi 14 2.2 Operace s posloupnostmi ................................... 15 2.3 Vlastnosti posloupnost´ ı .................................... 15 2.4 Konvergence posloupnosti, definice limity posloupnosti .................. 17 2.5 Algebra limit posloupnost´ ı .................................. 19 2.6 Pˇ r´ ıklady limit posloupnost´ ı .................................. 20 3 Nekoneˇ cn´ eˇ rady re´ aln´ ych ˇ c´ ısel 21 3.1 Z´ akladn´ ı vlastnosti ˇ c´ ıseln´ ych ˇ rad .............................. 21 3.2 Pˇ r´ ıklady ˇ c´ ıseln´ ych ˇ rad .................................... 22 3.3 Konvergence ˇ c´ ıseln´ ych ˇ rad .................................. 24 4 Z´ akladn´ ı vlastnosti funkc´ ı 26 4.1 Re´ aln´afunkce f re´ aln´ e promˇ enn´ e x ............................. 26 4.2 Operace s funkcemi ...................................... 26 4.3 Vlastnosti funkc´ ı ....................................... 30 4.4 Prost´ a funkce a inverzn´ ı funkce ............................... 33 4.5 Z´ akladn´ ı typy funkc´ ı ..................................... 34 4.5.1 Line´ arn´ ı funkce f : y = a 0 + a 1 x .......................... 35 4.5.2 Kvadratick´afunkce f : y = a 0 + a 1 x + a 2 x 2 .................... 36 4.5.3 Polynomick´ e funkce x 3 ,x 4 ,x 5 ,... .......................... 37 4.5.4 Line´ arn´ ı lomen´ e funkce f : y = a 0 + a 1 x b 0 + b 1 x ...................... 38 4.5.5 Exponenci´ aln´ ı funkce f : y = a x ........................... 39 1
Transcript
KMA/ZM1 PrednaskyRNDr. Blanka Sediva, PhD.Katedra matematiky FAV
Mezi zakladnı pojmy, se kterymi se budeme casto potkavat jsou:
Definice pojmu je charakteristika nejakeho matematickeho jevu, charakteristika (vymezenı pojmu)musı byt jednoznacna tak, abychom mohli rozhodnout, zda nejaky matematicky objekt definicivyhovuje nebo ne. Obvykle v definici vyjmenujeme vlastnosti, ktere matematicky objekt musımıt, abychom ho mohly oznacovat prıslusnym pojmem.
Veta (matematicka veta) je tvrzenı, ktere muzeme pomocı drıve zavedenych definic a jednoduchychlogickych uvah povazovat za platne. Kazda veta ma svoje predpoklady a dale vlastnı tvrzenı. Zhlediska logiky ma tedy charakter:
Kdyz jsou splneny predpoklady . . . , pak platı . . . .
Jednoduche (snadno dokazatelne) vety se casto nazyvajı tvrzenı nebo lemma.
Vety, ktere jsou zalozeny na zakladnıch (intuitivnıch) matematickych pojmech, ktere nelzedokazat, nazyvame axiomy.
Dukaz je logicky postup, pomocı ktereho overujeme platnost matematicke vety.
Pri dukazech se opırame o principy vyrokove logiky, zalozene na pojmu vyrok (cokoliv o cem ma smysluvazovat, zda je pravda nebo nenı pravda). V matematice pouzıvame logiku vyuzıvajıcı pouze dvastavy: vyrok ma smysl (pravdivy vyrok) nebo vyrok nema smysl (nepravdivy vyrok).Pro slozene vyroky budeme pouzıvat nasledujıcı oznacenı
a zaroven znacıme V1 ∧ V2 a slovne interpretujeme”platı vyrok V1 a zaroven vyrok V2“
nebo znacıme V1 ∨ V2 a slovne interpretujeme”platı vyrok V1 nebo vyrok V2 nebo platı oba vyroky,
tj. platı alespon jeden z vyroku“
implikace znacıme V1 ⇒ V2 a slovne interpretujeme”kdyz platı vyrok V1 pak platı vyrok V2“,
POZOR pokud vyrok V1 neplatı mohou pro vyrok V2 nastat obe situace, tedy muze platit anemusı
ekvivalence znacıme V1 ⇔ V2 a slovne interpretujeme”vyrok V1 platı prave tehdy, kdyz platı vyrok
V2“
negace znacıme V1 nebo nonV1 a slovne interpretujeme”nenı pravda, ze V1“, hodnota vyrazu V1
nabyva opacnych hodnot nez je hodnota vyrazu V1
Poznamka: Matematicke vety majı charakter implikacı nebo ekvivalencı. Casto pri dukazech vyuzıvametoho, ze platı
V1 ⇒ V2 ⇔ nonV2 ⇒ nonV1
4 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 1 Mnozina a operace s mnozinami 5
1 Mnozina a operace s mnozinami
1.1 Definice zakladnıch mnozinovych pojmu
Zavedenı pojmu mnozina je velice slozite, my budeme pod pojmem mnozina chapat souhrn matem-atickych objektu, ktere majı spolecnou vlastnost a dokazeme tyto objekty tedy vymezit. Je nezbytnenutne, abychom VZDY dokazali rozhodnout, zda matematicky objekt je prvkem mnoziny nebo nenıprvkem mnoziny.Pouzıvame znacenı
• objekt x je prvkem mnoziny M (objekt x nalezı do mnoziny M): x ∈M
• objekt x nenı prvkem mnoziny M (objekt x nenalezı do mnoziny M): x /∈M
• kazdy prvek x mnoziny M (vsechny prvky x z mnoziny M): ∀x ∈M
• existuje (alespon jeden) prvek x mnoziny M : ∃x ∈M
• existuje prave jeden prvek x mnoziny M : ∃!x ∈M
Mnozinu vymezujeme dvemi zakladnımi zpusoby:
1. vyctem vsech prvku {x1, x2, . . . , xn}
2. stanovenım charakteristickych vlastnostı {x : V (x)}, kde V (x) je vlastnost prvku, napr. x jesude cıslo.
Pokud nad prvky mnoziny zavedeme algebraicke operaci (scıtanı, odcıtanı, nasobenı a podobne) sprvky mluvıme obvykle o algebre. Modernı algebra studuje vlastnosti ruznych mnozin co nejobecneji,aby bylo mozno dosazene zavery pouzıt na co nejvıce konkretnıch prıpadu.
1.2 Cıselne mnoziny
Specialnım typem mnoziny jsou cıselne mnoziny, kdy prvky nazyvame cıslem. Pojem cısla patrı kjednomu ze zakladnıch pojmu matematiky, postupne v ramci historickeho vyvoje byl tento pojemstale rozsirovan a kazde dıte zopakuje pri seznamovanı s cısly tento historicky vyvoj.
}Realna cısla znacıme R (definici neuvadıme nikoliv proto, ze neexistuje, ale protoze je tak slozita,
ze to presahuje jednu prednasku)
5 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 1 Mnozina a operace s mnozinami 6
Iracionalnı cısla {x ∈ R : x nenı racionalnı}
Komplexnı cısla znacıme C = {[x, y] : x, y ∈ R, usporadana dvojice realnych cısel}
PlatıN ( Z ( Q ( R
Budeme predpokladat, ze pro vyse uvedene cıselne mnoziny zname zakladnı operace (je dobre sirozmyslet, ktere algebraicke operace nam
”zachovavajı mnozinu“, tj. pri kterych operacıch dostaneme
cıslo opet ze stejne mnoziny :
rovnost-nerovnost umıme rozhodnout, ktere dve cısla jsou stejna
usporadanı pro dve cısla umıme rozhodnout, ktere cıslo je mensı <, ev. vetsı >, prıpadne mensınebo rovno ≤ nebo vetsı nebo rovno geq
scıtanı pro dve cısla umıme najıt a+ b
nasobenı pro dve cısla umıme najıt a · b
odcıtanı pro dve cısla umıme najıt a− b
delenı pro dve cısla umıme najıt a/b
Rozmyslete si, ve kterych cıselnych mnozinach platı nasledujıcı tvrzenı:
komutativnı zakon tj. a+ b = b+ a, resp. a · b = b · a
asociativnı zakon tj. (a+ b) + c = a+ (b+ c), resp. (a · b) · c = a · (b · c)
existence nuloveho prvku 0 tj. existence prvku, pro ktery platı a+ 0 = 0 + a = a
existence opacneho prvku k prvku a tj. existence prvku −a, pro ktery platı a+ (−a) = 0
existence jednotkoveho prvku 1 tj. existence prvku, pro ktery platı a · 1 = 1 · a = a
existence inverznıho prvku k prvku a tj. existence prvku a−1, pro ktery platı a · a−1 = 1
distributivnı zakon tj. (a+ b) · c = a · c+ b · c
tranzitivnost rovnosti tj. a = b a zaroven b = c, pak a = c
tranzitivnost nerovnosti tj. pokud a < b a zaroven b < c, pak a < c
6 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 1 Mnozina a operace s mnozinami 7
1.3 Intervaly
Pro jednoduchost zavedeme nasledujıcı pojmy a oznacenı pro specialnı podmnoziny realnych cıselOmezene intervaly
uzavreny interval 〈a; b〉 je mnozina {x ∈ R : a ≤ x ≤ b} • •a b
polouzavreny interval (a; b〉 je mnozina {x ∈ R : a < x ≤ b} ◦ •a b
polouzavreny interval 〈a; b) je mnozina {x ∈ R : a ≤ x < b} • ◦a b
otevreny interval (a; b) je mnozina {x ∈ R : a < x < b} ◦ ◦a b
Neomezene intervaly
〈a; +∞) je mnozina {x ∈ R : x ≥ a} •a
(a; +∞) je mnozina {x ∈ R : x > a} ◦a
(−∞; a〉 je mnozina {x ∈ R : x ≤ a} •a
(−∞; a) je mnozina {x ∈ R : x < a} ◦a
(−∞; +∞) je mnozina x ∈ R
1.4 Operace s mnozinami, Vennovy diagramy
Mnozina je tedy matematicky objekt, se kterym muzeme ruzne mnozinove operace a zajımat se ovztahy mezi ruznymi mnozinami.My budeme potrebovat nasledujıcı mnozinove operace:
inkluse znacıme A ⊂ B a slovne interpretujeme mnozina A je podmnozinou mnoziny B, platı vyrokx ∈ A⇒ x ∈ B
mnozinova rovnost (identita) znacıme A ≡ B a slovne interpretujeme mnozina A je ekvivalentnıs mnozinou B, platı vyrok x ∈ A⇔ x ∈ B
sjednocenı znacıme A ∪B a slovne interpretujeme sjednocenı mnozin A a B, platı
A ∪B ≡ {x : x ∈ A ∨ x ∈ B}
tez pouzıvame symbolyn⋃i=1
Ai pro sjednocenı konecneho poctu mnozin,∞⋃i=1
Ai pro sjednocenı
nekonecneho poctu mnozin a⋃i∈I
Ai pro sjednocenı mnozin z indexove mnoziny I
7 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 1 Mnozina a operace s mnozinami 8
prunik znacıme A ∩B a slovne interpretujeme prunik mnozin A a B, platı
A ∩B ≡ {x : x ∈ A ∧ x ∈ B}
tez pouzıvame symbolyn⋂i=1
Ai pro prunik konecneho poctu mnozin,∞⋂i=1
Ai pro prunik nekonecneho
poctu mnozin a⋂i∈I
Ai pro prunik mnozin z indexove mnoziny I
rozdıl znacıme A\B a slovne interpretujeme rozdıl mnozin A a B,resp. doplnek mnoziny B v mnozineA platı
A \B ≡ {x : x ∈ A ∧ x /∈ B}
kartezsky soucin znacıme A×B a slovne interpretujeme kartezsky soucin mnozin A a B (ZALEZINA PORADI) platı
A×B ≡ {[x; y] : x ∈ A ∧ y ∈ B}
Uzitecne je graficke znazornovanı mnozinovych vztahu a operacı pomocı tzv. Vennovych diagramu,kdy mnoziny znazornujeme pomocı obrazku.
• Mnozina B je podmnozina mnoziny B
• Sjednocenı mnozin A ∪B
8 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 1 Mnozina a operace s mnozinami 9
• Prunik mnozin A ∩B
Vztahy mezi dvemi a vıce mnozinami se zabyva matematicka analyza. Zakladnım pojmem je v tetomatematicke oblasti pojem zobrazenı mnoziny A do mnoziny B.Specialnım prıpadem jednoznacneho zobrazenı z mnoziny realnych cısel do mnoziny realnych jsourealne funkce realnych promennych.
1.5 Omezenost mnozin, maximum a minimum mnoziny, supremum a in-fimum mnoziny
V teto kapitole se budeme zabyvat pouze podmnozinami mnoziny R. Pod pojmem mnozina M tedyv nasledujıcım textu chapeme M ⊂ R. Mohli bychom pracovat i v obecnejsıch mnozinach, ale potre-bujeme predevsım tyto dve zakladnı vlastnosti realnych cısel.Na realnych cıslech mame definovanou relaci usporadanı, tj. pro dve ruzna realna cısla a, b ∈ R nastanevzdy prave jedna z moznostı a < b nebo b < a.V realnych cıslech platı Cantoruv axiom spojitosti. Pro kazde dve ruzna realna cısla a, b ∈ R, a < b,existuje realne cıslo c tak, ze platı a < c < b.
Definice 1.1 Mnozina M se nazyva shora omezena mnozina, pokud existuje realne cıslo a ∈ Rtak, ze
∀x ∈M ⇒ x < a.
(pro kazde cıslo x z mnoziny M platı, ze x je mensı nez cıslo a)
Definice rıka, ze musı existovat cıslo a ∈ R, takovych cısel muze ale existovat i vıce.
Definice 1.2 Mnozina M se nazyva zdola omezena mnozina, pokud existuje realne cıslo b ∈ Rtak, ze
∀x ∈M ⇒ b < x.
(pro kazde cıslo x z mnoziny M platı, ze x je vetsı nez cıslo b)
Definice 1.3 Mnozina M se nazyva omezena mnozina, pokud je omezena shora a zaroven jeomezena zdola.
9 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 1 Mnozina a operace s mnozinami 10
Definice 1.4 Cıslo a ∈ R se nazyva supremem mnoziny M , pokud
1. ∀x ∈M ⇒ x < a nebo x = a (zkracene x ≤ a)
2. cıslo a je nejmensı cıslo splnujıcı podmınku (1.)
Supremum mnoziny M znacıme supM, supremum mnoziny je cıslo, ktere muze, ale nemusı lezet vmnozine M. Supremum mnoziny je vzdy urceno jednoznacne, tj. neexistujı dve suprema.
Definice 1.5 Cıslo b ∈ R se nazyva infimem mnoziny M , pokud
1. ∀x ∈M ⇒ x > a nebo x = a (zkracene x ≥ a)
2. cıslo a je nejvetsı cıslo splnujıcı podmınku (1.)
Infimum mnoziny M znacıme inf M, infimum mnoziny je cıslo, ktere muze, ale nemusı lezet v mnozineM. Infimum mnoziny je urceno jednoznacne.
Definice 1.6 Cıslo a ∈M se nazyva maximem mnoziny M , pokud ∀x ∈M ⇒ x ≤ aMaximum mnoziny M znacıme maxM, maximum mnoziny je vzdy prvkem mnoziny M. Maximummnoziny je urceno jednoznacne.
Definice 1.7 Cıslo b ∈M se nazyva minimem mnoziny M , pokud ∀x ∈M ⇒ x ≥ bMaximum mnoziny M znacıme minM, maximum mnoziny je vzdy prvkem mnoziny M. Minimummnoziny je urceno jednoznacne.
Veta 1.1 Necht’ M ⊂ R je podmnozina realnych cısel, pak platı nasledujıcı tvrzenı:
• Jestlize mnozina M je shora omezena, pak mnozina M ma supremum.
• Jestlize mnozina M je zdola omezena, pak mnozina M ma infimum.
• Jestlize mnozina M ma maximalnı prvkem, pak mnozina M ma supremum a maxM = supM .
• Jestlize mnozina M ma minimalnı prvkem, pak mnozina M ma infimum a minM = inf M .
• Jestlize mnozina M ma konecny pocet prvku, pak mnozina M je omezena (shora i zdola) a mamaximum i minimum a supremum i infimum.
Prıklady:
• Pro uzavreny interval 〈−1; 100〉 platı
– mnozina je omezena shora, cıslo a z definice je naprıklad cıslo 101 nebo cıslo 100.00001
– mnozina je omezena zdola
– mnozina ma maximum a minimum maxM = 100 a minM = −1
– mnozina ma supremum a infimum supM = 100 a inf M = −1
10 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 1 Mnozina a operace s mnozinami 11
• Pro otevreny interval (−1; 100) platı
– mnozina je omezena shora, cıslo a z definice je naprıklad cıslo 101 nebo cıslo 100.00001
– mnozina je omezena zdola
– mnozina nema maximum a nema minimum maxM = @ a minM = @– mnozina ma supremum a infimum supM = 100 a inf M = −1
• Pro interval (−1; +∞) platı
– mnozina nenı omezena shora
– mnozina je omezena zdola
– mnozina nema maximum a nema minimum maxM = @ a minM = @– mnozina nema supremum ale ma infimum supM = @ a inf M = −1
• Pro mnozinu M =
{1
n: n ∈ N
}=
{1;
1
2;1
3;1
4; . . .
}platı
– mnozina je omezena shora, naprıklad cıslem 2
– mnozina je omezena zdola, naprıklad cıslem 0
– mnozina ma maximum ale nema minimum maxM = 1 a minM = @– mnozina ma supremum a ma infimum supM = 1 a inf M = 0
• Pro mnozinu M ={n2 : n ∈ N
}= {1; 4; 9; 16; . . . } platı
– mnozina nenı omezena shora
– mnozina je omezena zdola, naprıklad cıslem 0
– mnozina nema maximum ale ma minimum maxM = @ a minM = 1
– mnozina nema supremum ale ma infimum supM = @ a inf M = 1
• mnozina M muze byt zobrazena tez graficky
mnozina M - silne vyznacena cast
•a
◦b
a = inf M = minM b = supM
11 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 1 Mnozina a operace s mnozinami 12
12 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 1 Mnozina a operace s mnozinami 13
1.6 Prehled pouzıvanych symbolu
V1 ⇒ V2 jestlize platı V1, pak platı V2
V1 ; V2 obecne neplatı tato implikace
V1 ⇔ V2 V1 platı prave tehdy, kdyz platı V2
V1 ∧ V2 platı vyrok V1 a zaroven platı vyrok V2
V1 ∨ V2 platı vyrok V1 nebo platı vyrok V2 (nebo platı oba vyroky)
V1 negace (opak) vyroku V1
M = {x : V (x)} mnozina M zadana pomocı vyroku V
x ∈M objekt x je prvkem mnoziny M
x /∈M objekt x nenı prvkem mnoziny M
∀x ∈M pro kazdy prvek mnoziny M
∃x ∈M existuje prvek mnoziny M
∃!x ∈M existuje prave jeden prvek mnoziny M
@ neexistuje
A ∪B sjednocenı mnozin A a B⋃Ai sjednocenı vıce mnozin Ai
A ∩B prunik mnozin A a B⋂Ai prunik vıce mnozin Ai
A ⊂ B mnozina A je podmnozina mnoziny B
A ⊆ B mnozina A je podmnozina mnoziny B (mnoziny mohou byt ekvivalentnı)
A ( B mnozina A je podmnozina mnoziny B (mnoziny nejsou ekvivalentnı)
N mnozina vsech prirozenych cısel
N0 mnozina vsech prirozenych cısel rozsırena o prvek 0
slovnım vyjadrenım naprıklad- kazdemu prirozenemu cıslu je prirazena jeho druha mocnina;
tabelarne (vyctem vsech clenu), pokud je jasny princip konstrukce posloupnosti, naprıklad {1; 4; 9; 16, ; 25; . . . }
analyticky (vzorem pro n-ty clen, naprıklad an = n2 + 3
rekurentne (je dano nekolik prvnıch clenu posloupnosti a je dan predpis, jak se vypocte dalsı clenna zaklade predchazejıcıch clenu), naprıklad a1 = 1, a2 = 4 a an − 2an−1 = 2
Graf posloupnosti musı odpovıdat situaci, kdy definicnı obor posloupnosti jsou prirozena cısla.
Vybranou posloupnostı z posloupnosti {an}+∞n=1 nazyvame posloupnost {bn}+∞
n=1, k nız existuje takovarostoucı posloupnost prirozenych cısel {kn}+∞
n=1, ze bn = akn .
Posloupnost{n2}+∞n=1
je vybranou posloupnostı z posloupnosti {n}+∞n=1 .
2.2 Operace s posloupnostmi
S posloupnostmi muzeme provadet zakladnı algebraicke operace tak, ze naprıklad soucet dvouposloupnostı je posloupnost, ktera ma cleny odpovıdajıcı souctu prıslusnych clenu puvodnıch posloup-nostı.
• rostoucı, pokud pro kazde n ∈ N platı an ≤ an+1;
• ostre rostoucı, pokud pro kazde n ∈ N platı an < an+1;
• klesajıcı, pokud pro kazde n ∈ N platı an ≥ an+1;
• ostre klesajıcı, pokud pro kazde n ∈ N platı an > an+1.
Souhrnne nazyvame rostoucı, ostre rostoucı, klesajıcı a ostre klesajıcı posloupnosti jako posloupnostimonotonnı.Konstantnı posloupnost nazyvame takovou posloupnost, pro kterou platı an = konstanta pro ∀n ∈ N
Definice 2.3 Posloupnost {an}+∞n=1 se nazyva
• omezena shora, pokud existuje realne cıslo KH takove, ze pro kazde n ∈ N platı an ≤ KH ;
• omezena zdola, pokud existuje realne cıslo KD takove, ze pro kazde n ∈ N platı KD ≤ an;
• omezena, pokud existuje realne cıslo K takove, ze pro kazde n ∈ N platı |an| ≤ K.
Cıslo sn nazveme n-tym castecnym souctem rady∞∑n=1
an a posloupnost {sn}+∞n=1 nazveme posloupnost
castecnych souctu dane rady.
Symbol∞∑n=1
an = a1 + a2 + a3 + . . . se nazyva rada.
Jestlize existuje (vlastnı nebo nevlastnı) limita posloupnosti castecnych souctu, tj. existuje s tak, ze
limn→∞
sn = s,
pak cıslo s nazveme souctem rady a pıseme
∞∑n=1
an = s
Pokud s je konecne cıslo, tj.∞∑n=1
an = s ∈ R rıkame, ze rada konverguje.
Pokud s je ±∞, tj.∞∑n=1
an = ±∞ rıkame, ze rada diverguje.
Pokud limn→∞
sn neexistuje, rıkame, ze rada osciluje.
21 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 3 Nekonecne rady realnych cısel 22
3.2 Prıklady cıselnych rad
Geometricka rada konverguje pro |q| < 1Radu
a+ aq + aq2 + aq3 + · · · =∞∑n=0
aqn,
kde a a q jsou dana cısla (a je prvnı clen rady a q je kvocient rady), nazveme geometrickouradou.
Pro castecne soucty platı
sn = a1− qn
1− q
a limita castecnych souctu pro n→∞ je pro |q| < 1 rovna a1
1− q, pro ostatnı prıpady je limita
rovna +∞, -∞ nebo neexistuje.
Celkove tedy platı, ze geometricka rada pro konverguje pro |q| < 1
a+ aq + aq2 + aq3 + · · · =∞∑n=0
aqn =a
1− qpro |q| < 1
Prıklad: Je dana nekonecna cıselna rada∞∑n=0
an, kde an =1
42n+4
1. Urcete pro n−ty clen posloupnosti castecnych souctu sn.
2. Sectete prvnıch 10,15 a 16 clenu posloupnosti an.
3. Vypoctete soucet nekonecne cıselne rady.
Pro cleny teto rady platı an ==1
42n+4=
1
42n · 44=
1
256· 1
16n, tedy jedna se o geometrickou radu
∞∑n=0
an =1
256
(1
16+
1
162+
1
163+ . . .
)=
1
256· 1
16
(1 +
1
16+
1
162+ . . .
),
kde prvnı clen rady a ma hodnotu
a =1
256 · 16=
1
4096
a kvocient rady q ma hodnotu
q =1
16.
Podle predchazejıcıch vztahu vıme, ze pro castecne soucty platı sn = a1− qn
1− qa rada konverguje
pro |q| < 1 k hodnote s∞ =a
1− q.
22 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 3 Nekonecne rady realnych cısel 23
1. Pro n−ty clen posloupnosti castecnych souctu sn platı
sn = a1− qn
1− q=
1
4096
1−(
116
)n1−
(116
)2. Sectete prvnıch 10,15 a 16 clenu posloupnosti an.
s10 =1
4096
1−(
116
)10
1−(
116
) .= 0.00026
s15 =1
4096
1−(
116
)15
1−(
116
) .= 0.00026
s16 =1
4096
1−(
116
)16
1−(
116
) .= 0.00026
3. Vypoctete soucet nekonecne cıselne rady, kde q =1
16a
∣∣∣∣ 1
16
∣∣∣∣ < 1
s∞ =a
1− q=
(1
4096
)1−
(116
) =1
3840
Rada∞∑n=0
1
n(n+ 1)konverguje
Pouzijeme nasledujıcı trik1
n(n+ 1)=
1
n− 1
n+ 1a dostavame posloupnost castecnych souctu
s1 =1
1− 1
2
s2 =1
1− 1
2+
1
2− 1
3
s3 =1
1− 1
2+
1
2− 1
3+
1
3− 1
4
s4 =1
1− 1
2+
1
2− 1
3+
1
3− 1
4+
1
4− 1
5. . . . . . . . .
sn =1
1− 1
n+ 1
Pro limitu castecnych souctu pak platı
limn→∞
1− 1
n+ 1= 1,
23 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 3 Nekonecne rady realnych cısel 24
tedy rada∞∑n=0
1
n(n+ 1)konverguje a soucet rady je roven jedne.
∞∑n=0
1
n(n+ 1)= 1
Rada∞∑n=0
1
ndiverguje, harmonicka rady
∞∑n=0
1
n= 1 +
1
2+
1
3+
1
4+
1
5+ . . .
= 1 +1
2+
(1
3+
1
4
)+
(1
5+
1
6+
1
7+
1
8
). . .
≥ 1 +1
2+
(1
2
)+
(1
4+
1
4
). . .
= 1 +1
2+
(1
2
)+
(1
2
). . .
3.3 Konvergence cıselnych rad
Veta 3.1 Nutna podmınka konvergence cıselne rady Necht’∞∑n=1
an = a1 + a2 + a3 + . . .
konverguje, pak limn→∞
an = 0.
Poznamky:
• jedna se nutnou podmınku, tedy: pokud limn→∞
an je ruzna od nuly, pak rada nemuze byt konver-
gentnı
• nejedna se o podmınku postacujıcı: prıkladem je harmonicka rada∞∑n=0
1
n, kde podmınka
limn→∞
an = 0 je splnena, ale rada je divergentnı
Rozhodnutı o konvergenci cıselne rady je v konkretnıch situacıch velmi slozite, pomahajı nam ruznakriteria konvergence.Jednodussı je situace pro rady s nezapornymi cleny, kdy muzeme pouzıvat naprıklad nasledujıcı kriteria
Srovnavacı kriterium: Bud’∞∑n=0
an a∞∑n=0
bn dve rady s nezapornymi cleny a necht’ existuje k tak,
ze pro vsechna n > k platı an ≤ bn, potom platı:
• je-li∞∑n=0
bn konvergentnı, je∞∑n=0
an take konvergentnı
24 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 3 Nekonecne rady realnych cısel 25
• je-li∞∑n=0
an divergentnı, je∞∑n=0
bn take divergentnı
Prıkladem pouzitı je rada∞∑n=0
1
lnn, ktera je divergentnı (srovnam
1
lnn>
1
n)
Cauchyho (odmocninove) kriterium Bud’∞∑n=0
an rada s nezapornymi cleny a necht’ existuje limita
limn→∞
n√an = A , potom platı:
• je-li A < 1, je∞∑n=0
an konvergentnı;
• je-li A > 1, je∞∑n=0
an divergentnı;
• je-li A = 1, nemohu o konvergenci na zaklade tohoto kriteria rozhodnout.
D´Alembertovo (podılove) kriterium Bud’∞∑n=0
an rada s kladnymi cleny a necht’ existuje limita
limn→∞
an+1
an= A , potom platı:
• je-li A < 1, je∞∑n=0
an konvergentnı;
• je-li A > 1, je∞∑n=0
an divergentnı;
• je-li A = 1, nemohu o konvergenci na zaklade tohoto kriteria rozhodnout.
25 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 4 Zakladnı vlastnosti funkcı 26
4 Zakladnı vlastnosti funkcı
4.1 Realna funkce f realne promenne x
• zobrazenı f : A→ B, kde A ⊆ R a B ⊆ R
• zobrazenı, ktere ke kazdemu x ∈ A prirazuje prave jedno y = f(x) ∈ B
• ∀x ∈ A ∃! y ∈ B : y = f(x)
• x - argument funkce f ; y - funkcnı hodnota funkce f
• D (f) = A: definicnı obor funkce f
• H (f) = B: obor (funkcnıch) hodnot funkce f
• maximalnı (existencnı) definicnı obor je takova podmnozina realnych cısel, pro ktera ma ana-lyticky vzorec funkce smysl
• graf funkce: mnozina vsech bodu {[x, y];x ∈ D (f), y = f(x)} ve zvolene soustave souradnic(kartezske souradnice Oxy, sfericke souradnice, . . . )
• zpusoby zadanı funkce
– analyticke (vzorec, rovnice, nekolik rovnic pro ruzne casti definicnıho oboru + definicnıobor)
– max f(x) je funkcnı hodnota v bode maxima - lezı na ose y
– xmax = argmax f(x) je bod, ve kterem funkce sveho maxima nabyva - lezı na ose x
• monotonı funkce
– funkce f je na mnozine M ⊆ D (f) ostre rostoucı:
∀x1, x2 ∈M, x1 < x2 platı f(x1) < f(x2)
– funkce f je na mnozine M ⊆ D (f) ostre klesajıcı:
31 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 4 Zakladnı vlastnosti funkcı 32
∀x1, x2 ∈M, x1 < x2 platı f(x1) > f(x2)
– funkce f je na mnozine M ⊆ D (f) rostoucı:
∀x1, x2 ∈M, x1 < x2 platı f(x1) ≤ f(x2)
– funkce f je na mnozine M ⊆ D (f) klesajıcı:
∀x1, x2 ∈M, x1 < x2 platı f(x1) ≥ f(x2)
– funkce monotonı: funkce klesajıcı, rostoucı
– funkce ryze monotonı: funkce ostre rostoucı, ostre klesajıcı
• vzajemne vazby mezi omezenostı, existencı lokalnıch a globalnıch extremu a monotoniı
– pokud ma funkce globalnı minimum, pak je omezena zdola
– pokud ma funkce globalnı maximum, pak je omezena shora
– lokalnı extremy k omezenosti nepostacujı
– kazdy globalnı extrem je i extrem lokalnı
– existujı funkce omezene zdola, ktere nemajı globalnı minimum
– existujı funkce omezene shora, ktere nemajı globalnı maximum
– pokud ma funkce v bode xmin ostre lokalnı minimum, pak ∃ ε > 0 takove, ze funkce f je vintervalu (xmin − ε, xmin) ostre klesajıcı a v intervalu (xmin, xmin + ε) ostre rostoucı
– pokud ma funkce v bode xmin lokalnı minimum, pak ∃ ε > 0 takove, ze funkce f je vintervalu (xmin − ε, xmin) klesajıcı a v intervalu (xmin, xmin + ε) rostoucı
– pokud ma funkce v bode xmax ostre lokalnı maximum, pak ∃ ε > 0 takove, ze funkce f jev intervalu (xmax − ε, xmax) ostre rostoucı a v intervalu (xmax, xmax + ε) ostre klesajıcı
– pokud ma funkce v bode xmax lokalnı maximum, pak ∃ ε > 0 takove, ze funkce f je vintervalu (xmax − ε, xmax) rostoucı a v intervalu (xmax, xmax + ε) klesajıcı
– existujı funkce f , ktere jsou v intervalu (a− ε, a) monotonnı a v intervalu (a, a+ ε) opacnemonotonnı, ale nemajı v bode a extrem
32 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 4 Zakladnı vlastnosti funkcı 33
4.4 Prosta funkce a inverznı funkce
– funkce f je prosta:
∀x1, x2 ∈ D (f), x1 6= x2 platı f(x1) 6= f(x2)
– funkce f je prosta na mnozine M ⊆ D (f):
∀x1, x2 ∈M, x1 6= x2 platı f(x1) 6= f(x2)
– funkce f−1 je inverznı k funkci f : pokud funkce f je prosta a platı
y = f(x)⇔ x = f−1(y)
– D (f−1) ≡ H (f)
– D (f) ≡ H (f−1)
– ∀x ∈ D (f) : x = f−1(f(x))
– f−1 ◦ f(x) ≡ 1
– pokud je funkce f prosta prosta na mnozine M ⊂ D (f), existuje inverznı funkce na tetomnozine M
– kazda ryze monotonı funkce je prosta → ke kazde ryze monotonı funkci existuje funkceinverznı
– grafy inverznıch funkcı jsou symetricke podle osy prvnıho a tretıho kvadrantu
33 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 4 Zakladnı vlastnosti funkcı 34
4.5 Zakladnı typy funkcı
• linearnı funkce f : y = a0 + a1 x grafem je prımka
• kvadraticke funkce f : y = a0 + a1 x+ a2 x2 grafem je p parabola
• mocninne funkce f : y = xα
– prirozeny mocnitel α ∈ N
– cely mocnitel α ∈ Z
– racionalnı mocnitel α =p
g∈ Q
– iracionalnı mocnitel α ∈ R
• linearnı lomene funkce f : y =a0 + a1 x
b0 + b1 xgrafem je hyperbola
• algebraicke funkce (vznikne z linearnı funkce pomocı konecneho poctu operacı scıtanı, odcıtanı,nasobenı, delenı, umocnovanı a odmocnovanı)
– polynomicke funkce stupne n (polynom Pn) f : y = a0 + a1 x+ a2 x2 + . . .+ an x
n
– lomene racionalnı funkce f : y =PnQm
– iracionalnı funkce (obsahuje odmocniny x)
• exponencialnı funkce f : y = ax
• logaritmicke funkce (inverznı k exponencialnım) f : y = loga(x)
• funkce s absolutnı hodnotou
• goniometricke funkce f : sin, cos, tg, cotg
• cyklometricke funkce (inverznı ke goniometrickym) f : arcsin, arccos, arctg, arccotg
34 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 4 Zakladnı vlastnosti funkcı 35
4.5.1 Linearnı funkce f : y = a0 + a1 x
• definicnı obor i obor hodnot jsou realna cısla
• monotonnı funkce,
– a1 > 0 ostre rostoucı
– a1 < 0 ostre klesajıcı
– a1 = 0 konstanta, nerostoucı, neklesajıcı
• neomezena funkce (pro a1 6= 0)
• inverznı funkce existuje pokud a1 6= 0
• grafem je prımka
• grafem inverznı funkce je opet prımka
Prıklady
• Sestrojte grafy funkcı f1 : y = x+ 3 a f2 : y = 2x− 1 a najdete k funkcım funkce inverznı
• Sestrojte grafy funkcı f1 : y =1
3x− 2 a f2 : y =
3− 2x
2a najdete k funkcım funkce inverznı
• Sestrojte graf funkce f1 : y =4x2 − 5x
2x
35 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 4 Zakladnı vlastnosti funkcı 36
4.5.2 Kvadraticka funkce f : y = a0 + a1 x+ a2 x2
• definicnı obor jsou realna cısla
• funkce omezena zdola pokud a2 > 0
• funkce omezena zhora pokud a2 < 0
• existujı dve vetve inverznı funkce
• grafem je parabola, parabola protına osu x v nulovych bodech
• f1 : y = x2 − 4
• f2 : y = −x2 − x+ 6 = −(x+ 3)(x− 2)
Prıklady
• Sestrojte graf funkce f : y = x2−5x+6 pro x ∈ 〈−5; 7〉 , urcete obor funkcnıch hodnot, sestrojtegraf funkce g(x) = |f(x)| a sestrojte graf funkce h(x) = x2 − 5|x|+ 6
• Sestrojte graf funkce f : y = x2 − 5x+ 6, urcete prusecıky funkce f s osami, najdete nejmensı anejvetsı hodnotu funkce f na intervalu 〈0; 4〉
36 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 4 Zakladnı vlastnosti funkcı 37
4.5.3 Polynomicke funkce x3, x4, x5, . . .
x2, x4, x6
x, x3, x5
Prıklady
• Sestrojte grafy funkcı f1 : y = x4 a f2 : y = x6 a na grafech vyznacte body funkcnıch hodnot
pro x =1
14
• Sestrojte grafy funkcı f1 : y = x3 a f2 : y = x5 a na grafech vyznacte body funkcnıch hodnot
pro x1 =1
32a pro x2 = 0, 25
37 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 4 Zakladnı vlastnosti funkcı 38
4.5.4 Linearnı lomene funkce f : y =a0 + a1 x
b0 + b1 x
• definicnı obor jsou vsechna realna cısla krome bodu −b0
b1
• obor hodnot jsou vsechna realna cısla krome bodu −a1
b1
• grafem je hyperbola
• inverznı funkcı je opet linearnı lomena funkce
• 1
xax+ 2
x− 1
Prıklady
• Sestrojte graf funkce f : y =2x− 2
x+ 1a vypoctete prusecıky s osami, urcete definicnı obor a obor
hodnot
• Sestrojte graf funkce f : y =3x+ 5
x+ 2a vypoctete prusecıky s osami, vypoctete funkcnı hodnoty
f(−1), f(−1/3), f(1)
38 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 4 Zakladnı vlastnosti funkcı 39
• Sestrojte grafy funkcı 3x, 4x a sestrojte k funkcım grafy funkcı inverznıch
39 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 4 Zakladnı vlastnosti funkcı 40
4.5.6 Logaritmicke funkce f : y = logz(x)
• Logaritmicke funkce jsou inverznı k exponencialnım funkcım
• Definicnı obor (0;∞), obor hodnot jsou vsechna realna cısla
• log10(x), loge(x), 10x
• log2(x), log1/2(x), 2x
40 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 4 Zakladnı vlastnosti funkcı 41
4.5.7 Funkce s absolutnı hodnotou
• |2x|+ 1, |2x+ 1|, 2x
• |x2 − 2x− 8|, x2 − 2|x| − 8, x2 − 2x− 8
41 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 5 Polynomy 42
5 Polynomy
Definice 5.1 Necht’ a0, . . . , an jsou prvky mnoziny T , n ≥ 0 prirozene cıslo. Polynomem (mno-hoclenem) P promenne x ∈ T nazyvame predpis
P (x) = anxn + an−1x
n−1 + . . .+ a1x+ a0 ∀x, an 6= 0
Stupen polynomu P (x) je nejvyssı mocnina promenne x u nız je nenulovy koeficient, znacıme st(P ).Nulovy polynom je polynom, ktery ma vsechny koeficienty rovny 0. Stupen nuloveho polynomu nenıdefinovan. Nekdy je vhodne dodefinovat stupen nuloveho polynomu cıslem −1.V dalsım budeme predpokladat, ze pracujeme s realnymi T = R (prıpadne komplexnımi polynomyT = C), tj. x ∈ R resp. x ∈ C.
Prıklady polynomu:
• 5x2 + 4x+ 6 ⇒ JE polynom stupne 2
• 7x10 + 23.2x ⇒ JE polynom stupne 10
• 5 ⇒ JE polynom stupne 0
• 4x3 + πx− 19 ⇒ JE polynom stupne 3
• sinx+ 7x5 ⇒ NENI polynom
• 0 ⇒ JE polynom, stupen nenı definovan
• 4
3x3 + x7 + 2 ⇒ JE polynom stupne 3
• 5x−6 + x5 ⇒ NENI polynom
• (4 + 2i )x2 + ix7 ⇒ JE polynom stupne 7
Definice 5.2 Polynomy P (x) a Q(x) se rovnajı (P (x) = Q(x)), pokud platı
P (α) = Q(α) ∀α
Veta 5.1 Polynomy P (x) = anxn+an−1x
n−1+. . .+a1x+a0 a Q(x) = bmxm+bm−1x
m−1+. . .+b1x+b0
se rovnajı prave tehdy, kdyz majı stejny stupen a rovnajı se jejich koeficienty, tj. n = m a
ai = bj i = 0, 1, . . . , n.
Prıklad: Urcete koeficienty A,B,C,D polynomuP (x) = A(x+ 1) +B(x3 + x2) + Cx2 − 3D tak, aby byl roven polynomu x3 + 2x+ 5.
Bx3 + (B + C)x2 + Ax+ (A− 3D) = 1x3 + 0x2 + 2x+ 5
B = 1
B + C = 0
A = 2
A− 3D = 5
⇒
A = 2
B = 1
C = −1
D = −1
42 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 5 Polynomy 43
Definice 5.3 Operace s polynomy Necht’ jsou dany dva polynomy
P (x) = anxn + an−1x
n−1 + . . .+ a1x+ a0 =n∑i=0
aixi
a
Q(x) = bmxm + bm−1x
m−1 + . . .+ b1x+ b0 =m∑j=0
bjxj
1. Soucet dvou polynomu P (x) +Q(x) = (P +Q)(x) je polynom stupne max {n;m}
P (x) +Q(x) = (P +Q)(x) =
max{n;m}∑i=0
(ai + bi)xi
2. Nasobenı polynomu nenulovym cıslem λ ∈ R je polynom stupne n
λ · P (x) =n∑i=0
(λ · ai)xi
3. Nasobenı polynomu polynomem je polynom stupne n+m
P (x) ·Q(x) =n+m∑k=0
ckxk,
kde
ck =n∑i=0
m∑j=0
aibj
4. Delenı polynomu polynomem NENI OBECNE POLYNOM, ale racionalnı lomena funkce.Pokud Q(x) nenulovy, pak existujı jednoznacne urcene polynomy S(x) a R(x) tak, ze
P (x) = S(x) ·Q(x) +R(x),
kde R(x) nazyvame zbytek po delenı a st(R) < st(Q).
Definice 5.4 Necht’ je dan polynom P (x) =n∑i=0
aixi. Rekneme, ze cıslo c je korenem polynomu
(nulovym bodem polynomu) P (x), jestlize platı
P (c) =n∑i=0
aici = 0.
Poznamka: Polynom s realnymi koeficienty nemusı mıt obecne zadny realny koren - naprıklad polynomp(t) = 1 + t2 nema zadny realny koren, ma vsak dva imaginarnı koreny −i a i .
43 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 5 Polynomy 44
Veta 5.2 Vlastnosti korenu polynomu s realnymi koeficienty
• ZAKLADNI VETA ALGEBRY Kazdy polynom stupne n ≥ 1 ma v C alespon jeden koren.
• Jestlize c je korenem polynomu P (x), pak polynom x− c delı polynom P (x) beze zbytku, tj.
P (x) = (x− c) · S(x);
• Jestlize c = a + i b je komplexnım korenem polynomu P (x), pak korenem polynomu je takekomplexne sdruzene cıslo c = a− i b a platı
P (x) = (x− (a+ i b)) · (x− (a− i b)) · S(x) =(x2 − 2 ax+ a2 + b2
)· S(x);
Definice 5.5 Necht’ je dan polynom P (x) =n∑i=0
aixi. Rekneme, ze cıslo c je k-nasobnym korenem
polynomu (nulovym bodem polynomu) P (x), jestlize existuje S(x) 6= 0 tak, ze platı
P (x) = (x− c)kS(x)
Veta 5.3 DUSLEDEK ZAKLADNI VETY ALGEBRY Kazdy polynom stupne n ≥ 1 s real-nymi nebo komplexnımi koeficienty ma v telese komplexnıch cısel prave n korenu, jestlize kazdy korenpocıtame tolikrat, kolik je jeho nasobnost.Oznacıme-li c1, c2, . . . cr vsechny navzajem ruzne (komplexnı) koreny polynomu P a oznacıme-li kjnasobnost j−teho korenu, pak k1 + k2 + · · ·+ kr = n a platı
P (x) = an · (x− c1)k1 · (x− c2)k2 · · · · · (x− cr)kr .
Polynomy (x− cj)kj nazyvame korenovymi ciniteli polynomu P a predchozımu vztahu rıkame rozkladpolynomu na (komplexnı) soucin korenovych cinitelu.Pokud vyuzijeme skutecnosti, ze pro komplexnı korenem polynomu platı, ze korenem je tez komplexnesdruzene cıslo a oznacıme c1, c2, . . . , cr realne koreny a cr+1, cr+1, . . . , cr+s, cr+s komplexnı koreny poly-nomu P dostavame realny rozklad na korenove cinitele tvaru
P (x) = an·(x−c1)k1 ·· · ··(x−cr)kr ·(x2−(cr+1+cr+1)x+cr+1·cr+1)kr+1·· · ··(x2−(cr+s+cr+s)x+cr+s·cr+s)kr+s
44 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 5 Polynomy 45
5.1 Delenı polynomu polynomem
Algoritmus delenı polynomu polynomem je obdobny algoritmu delenı realnych cısel a ukazeme ho naprıkladu delenı polynomu P (x) = 2x4 − 3x3 − 5x+ 6 polynomem Q(x) = x2 + 1
p je delitelem koeficientu an a cıslo q je delitelem koeficientu a0.Navıc pokud polynom ma pouze kladne koeficienty aj > 0 musı byt koren polynomu zaporne cıslo.
Prıklad: Uvazujme polynom x7 + 4x6 − 3x5 − 18x4 + x3 + 4x2 − 3x − 18. Pokud tento polynom maracionalnı koren, musı platit, ze tento koren je delitelem koeficientu a0 = 18.Koren tedy musı byt z mnoziny {±1;±2;±3;±6;±9;±18} .Pomocı Hornerova schematu dostavam
kde S(x) je polynom stupne 4, ktery nema racionalnı koreny.
46 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 5 Polynomy 47
5.2.2 Odhad poctu realnych korenu a jejich polohy
Veta 5.5 Necht’ P (x) = anxn + an−1x
n−1 + · · ·+ a1x+ a0 je polynom s realnymi koeficienty, pak
1. Descartesova veta Pocet kladnych korenu polynomu P (x) je bud’ roven poctu znamenkovychzmen v posloupnosti an, an−1, . . . , a0 jeho koeficientu nebo je o sudy pocet mensı.
2. Vsechny realne koreny polynomu P (x) lezı v intervalu 〈−A;A〉 ,kde A = max {|a0|; |a1|; . . . ; |an|}+ 1
3. Pokud alespon jeden z koeficientu polynomu je zaporny platı nasledujıcı hornı odhady realnychkorenu α.
• Maclaurinova veta α < 1 +|ai||an|
• Lagrangova veta α < 1 +n−r√B
• Tillova veta α < 1 + s−r
√|ai|as
kde
ai . . . nejmensı zaporny koeficient v posloupnosti an, an−1, . . . , a0;
ar . . . prvnı zaporny koeficient;
as . . . nejvetsı kladny koeficient pred prvnım zapornym koeficientem;
B . . . nejvetsı z absolutnıch hodnot zapornych koeficientu.
Prıklad: Uvazujme polynom P (x) = x4−2x3+x2−10x−20. Pak posloupnost koeficientu an, an−1, . . . , a0
je1,−2, 1,−10,−20
• pocet znamenkovych zmen je 3 ⇒ pocet kladnych korenu je 3 nebo 1;
• A = max {|1|; | − 2|; |1|; | − 10|; | − 20|}+ 1 = 21
•
ai = a0 = −20 . . . nejmensı zaporny koeficient v posloupnosti 1,−2, 1,−10,−20;
ar = a3 = −2 . . . prvnı zaporny koeficient;
as = a4 = 1 . . . nejvetsı kladny koeficient pred prvnım zapornym koeficientem;
B = 20 . . . nejvetsı z absolutnıch hodnot zapornych koeficientu.
a pro odhady platı
– Maclaurinova veta α < 1 +| − 20||1|
= 21
– Lagrangova veta α < 1 +n−r√B = 1 +
4−3√
20 = 21
– Tillova veta α < 1 +4−3
√| − 20|
1= 21
47 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 5 Polynomy 48
Odhady nam nepomohly, budeme opakovat postup pro polynom Q(x) = P (−x) a tım zıskame dolnıodhad korenu polynomu Q(x) = P (−x) = x4 + 2x3 + x2 + 10x − 20 a pro odhady korenu tohotopolynomu platı
• posloupnost koeficientu 1, 2, 1, 10,−20
• pocet znamenkovych zmen je 1⇒ pocet kladnych korenu polynomu Q(x) je 1⇒ pocet zapornychkorenu polynomu P (x) je 1;
• A = max {|1|; |2|; |1|; |10|; | − 20|}+ 1 = 21
•
ai = a0 = −20 . . . nejmensı zaporny koeficient v posloupnosti 1, 2, 1, 10,−20;
ar = a0 = −20 . . . prvnı zaporny koeficient;
as = a1 = 10 . . . nejvetsı kladny koeficient pred prvnım zapornym koeficientem;
B = 20 . . . nejvetsı z absolutnıch hodnot zapornych koeficientu.
a pro odhady platı
– Maclaurinova veta α < 1 +| − 20||1|
= 21
– Lagrangova veta α < 1 +n−r√B = 1 +
4−0√
20.= 3.115
– Tillova veta α < 1 +1−0
√| − 20|
10= 3
Realne koreny polynomu P (x) = x4 − 2x3 + x2 − 10x− 20 lezı v intervalu 〈−3; 21〉.Jeden koren je zaporny a bud’ tri nebo jeden koren je kladny.
48 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 5 Polynomy 49
5.3 Numericke metody odhadu realnych korenu polynomu P (x)
• Metoda pulenı intervaluPredpokladame, ze existuje interval 〈c1; c2〉 takovy, ze P (c1) · P (c2) < 0, ve kterem existujealespon jeden koren polynomu.
Pak oznacım c3 =c1 + c2
2a bud’ P (c3) = 0 a c3 je koren nebo P (c3) 6= 0. Z intervalu 〈c1; c3〉 a
〈c3; c2〉 vyberu interval, ve kterem funkcnı hodnoty v krajnıch bodech majı ruzna znamenka, tj.pro ktery platı P (ci) · P (cj) < 0.
Postup opakuji dokud urcenı korenu nenı dostatecne presne, tj. dokud nenı |ci − ci+1| < ε
• Metoda secen (metoda regula falsi)Predpokladame, ze existuje interval 〈c1; c2〉 takovy, ze P (c1) · P (c2) < 0, ve kterem existujealespon jeden koren polynomu.
Pak oznacım c3 =c2P (c1)− c1P (c2)
P (c1)− P (c2)prusecık spojnice bodu [c1;P (c1)] a [c2;P (c2)] s osou x. Z
intervalu 〈c1; c3〉 a 〈c3; c2〉 vyberu interval, ve kterem funkcnı hodnoty v krajnıch bodech majıruzna znamenka, tj. pro ktery platı P (ci) · P (cj) < 0.
Postup opakuji dokud urcenı korenu nenı dostatecne presne, tj. dokud nenı |ci − ci+1| < ε
49 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 5 Polynomy 50
• Metoda tecen (Newtonova metoda)Predpokladame, ze existuje interval 〈c1; c2〉 takovy, ze P (c1) · P (c2) < 0, ve kterem existujealespon jeden koren polynomu. A dale predpokladejme, ze derivace P ′(x) a P ′′(x) majı ve sle-dovanem intervalu stale znamenko.
Pak posloupnost bodu vytvorıme podle vztahu ck+1 = ck −P (ck)
P ′(ck).
Postup opakuji dokud urcenı korenu nenı dostatecne presne, tj. dokud nenı |ci − ci+1| < ε
50 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 5 Polynomy 51
5.4 Rozklad lomene racionalnı funkce na parcialnı zlomky
Pro funkce typuPn(x)
Qm(x), kde Pn a Qm jsou polynomy platı
1. pokud n ≥ m, pak existujı polynomy Rn−m a Pn (n < m) takove, zePn(x)
Qm(x)= Rn−m −
Pn(x)
Qm(x)a resıme rozklad pro podıl polynomu, kde polynom ve jmenovateli Qm(x) ma vyssı stupen nezpolynom v citateli Pn(x)
KMA/ZM1 (Blanka Sediva): 6 Vektory a vektorovy prostor 53
6 Vektory a vektorovy prostor
6.1 Vektorovy prostor
V prvnı prednasce jsme si upresnili a rozsırili pojem cıslo a cıselne mnoziny. Obecne uvazujme mnozinu,na ktere jsou zavedeny operace scıtanı + a nasobenı · a tyto operace splnujı zakladnı axiomy: aso-ciativita, komutativita, existence nuloveho prvku vzhledem ke scıtanı, existence jednotkoveho prvkuvzhledem k nasobenı, existence inverznıch prvku vzhledem k nasobenı a scıtanı a distributivnı zakon.Matematickou strukturu, ktere ma vsechny vyse uvedene vlastnosti nazyvame telesem a znacıme(T,+, ·).Klasickym prıkladem teles jsou mnoziny vsech realnych cısel s obvyklymi operacemi, mnoziny vsechracionalnıch cısle s obvyklymi operacemi, ale i naprıklad mnozina komplexnıch cısel.
Definice 6.1 Vektorovy prostor Predpokladejme, ze T je nejake teleso (naprıklad realna cısla).Vektor dimenze n nad telesem T je usporadana n-tice (x1, x2, x3, . . . , xn) prvku telesa T.Cıslo xi nazyvame i-ta souradnice vektoru.Vektor (x1, x2, x3, . . . , xn) znacımemathbfx, ev. −→xJsou-li x = (x1, x2, x3, . . . , xn) a y = (y1, y2, y3, . . . , yn) dva vektory stejne dimenze n nad telesem T ,pak souctem vektoru x a y rozumıme vektor
(x1 + y1, x2 + y2, x3 + y3, . . . , xn + yn).
Je-li a ∈ T prvek telesa T a vektor x = (x1, x2, x3, . . . , xn), pak soucinem prvku a a vektoru x rozumımevektor
x = (a · x1, a · x2, a · x3, . . . , a · xn).
Mnozinu vsech vektoru dimenze n nad telesem T spolu s prave definovanymi operacemi scıtanı vektorua nasobenı vektoru prvkem telesa nazyvame aritmeticky vektorovy prostor dimenze n nadtelesem T . Obvykle tento vektorovy prostor znacıme V .
Scıtanı vektoru stejne dimenze a nasobenı prvky z telesa T ma radu vlastnostı spolecnych se scıtanıma nasobenım v ramci telesa T .Pro obecne vektorove prostory nenı dulezita jejich konkretnı vycıslena podoba (konkretnı hodnotysouradnic), ale algebraicke vlastnosti scıtanı a nasobenı prvky telesa T .
• x + y ∈ V pro vsechny x,y ∈ V
• (x + y) + z = x + (y + z) pro vsechny x,y, z ∈ V
• x + y = y + x pro vsechny x,y ∈ V
• existence prvku 0 takoveho, ze x + 0 = x pro vsechny x ∈ V
• pro vsechny x ∈ V existence prvku −x takoveho, ze x +−x = 0
• a · x ∈ V pro vsechny x ∈ V a a ∈ T
53 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 6 Vektory a vektorovy prostor 54
• existence prvku 1 ∈ T takoveho, ze 1 · x = x pro vsechny x ∈ V
• a · (b · x) = (a · b) · x pro vsechny x ∈ V a a, b ∈ T
• (a+ b) · x) = a · x + b · x pro vsechny x ∈ V a a, b ∈ T
• a · (x + y) = a · x + a · y pro vsechny x,y ∈ V a a ∈ T
Prvky prostoru V , ktere splnujı vyse uvedena axiomy se nazyvajı vektory a prostor V nazyvamevektorovy prostor.Prıklady vektorovych prostoru
Mnozina Rn s operacemi scıtanı a nasobenı skalarem je mnozina vsech n-dimenzionalnıch us-poradanych n-tic realnych cısel. V prostoru R2 si muzeme predstavit geometrickou interpretacivektoru.
Mnozina vsech realnych polynomu s operacemi scıtanı polynomu a nasobenı polynomu realnychcıslem je nekonecne dimenzionalnı vektorovy prostor prvku tvaru p(x) = a0 + a1 · x + a2 · x2 +a3 · x3 + . . . nad telesem realnych cısel.
Mnozina vsech realnych polynomu stupne nejvyse n operacemi scıtanı polynomu a nasobenıpolynomu realnych cıslem je n- dimenzionalnı vektorovy prostor prvku tvaru p(x) = a0 + a1 ·x+ a2 · x2 + a3 · x3 + . . . an · xn nad telesem realnych cısel.
Mnozina vsech realnych funkcı definovanych na uzavrenem intervalu 〈0, 1〉 spolu s operacemi(f + g) (x) = f(x) + g(x) a (kf)(x) = kf(x)
KMA/ZM1 (Blanka Sediva): 6 Vektory a vektorovy prostor 55
6.2 Volny a vazany vektor, podprostor vektoroveho prostoru
Termıny volny a vazany vektor vychazı z geometricke interpretace konecne dimenzionalnıch vektoruRn.
• Pokud uvazujeme o vektorech jako o prvcıch vektoroveho prostoru V , ktere splnujı vyse uve-dena pravidla o scıtanı vektoru, nasobenı vektoru prvkem telesa T , existenci nuloveho prvkuvektoroveho prostoru V a podobne, mluvıme o volnych vektorech.
• Pokud vektor chapeme jako orientovanou spojnici dvou bodu, mluvıme o vazanych vektorech.Geometricka interpretace souctu dvou vektoru pak odpovıda nasim stredoskolskym znalostem.
Definice 6.2 Podprostor vektoroveho prostoru. Kazdou podmnozinu U vektoroveho prostoru V, kteraje uzavrena vuci operacım scıtanı vektoru a nasobenı vektoru prvkem z T nazveme vektorovym pod-prostorem U .
Prıklady vektorovych podprostoru:
1. Mnozina vsech vektoru z prostoru {(k · x1, k · x2); k ∈ R} tvorı vektorovy podprostor mnozinyR2.
2. Mnozina spojitych funkcı na intervalu 〈0, 1〉 tvo59 podprostor vektorov0ho prostoru vsech funkcıdefinovanych na intervalu 〈0, 1〉.
3. Prazdny prostor je podprostor vektoroveho prostoru a cely prostor je take podprostor vek-toroveho prostoru. (jedna se o tzv. trivialnı prostory)
55 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 6 Vektory a vektorovy prostor 56
6.3 Baze vektoroveho prostoru a souradnice vektoroveho prostoru vzh-ledem k bazi
Definice 6.3 Linearnı kombinace vektoru a linearnı obal mnoziny M .Necht’ jsou dany vektory v1,v2, . . .vk linearnı kombinacı techto vektoru rozumıme kazdy vektortvaru
α1 · v1 + α2 · v2 + α3 · v3 + · · ·+ αk · vk
Linearnım obalem mnoziny M rozumıme vsechny vektory tvaru
α1 · v1 + α2 · v2 + α3 · v3 + · · ·+ αk · vk,
kde v1,v2, . . .vk ∈M.Linearnı obal znacıme L(M).
Linearnım obalem mnoziny M jsou vsechny vektory, ktere vzniknou”linearnı kombinacı“ vektoru z
mnoziny. Rıkame, ze mnozina M generuje linearnı obal L(M).Naprıklad
1. pro vektory v1 = (1, 0) a v2 = (0, 1) je jejich linearnım obalem L({(1, 0), (0, 1)}) cely prostorR2;
2. pro vektory v1 = (1, 0) a v2 = (2, 0) je jejich linearnım obalem L({(1, 0), (2, 0)}) prostor vsechvektoru tvaru (k, 0), kde k ∈ R
Definice 6.4 Vektory v1,v2, . . .vk jsou linearne nezavisle, jestlize z rovnosti
α1 · v1 + α2 · v2 + α3 · v3 + · · ·+ αk · vk = 0
plyne, ze α1 = α2 = · · · = αk = 0.Vektory v1,v2, . . .vk jsou linearne zavisle, jestlize existujı α1, α2, . . . , αk, z nichz alespon jeden jenenulovy, pro ktera platı rovnost
α1 · v1 + α2 · v2 + α3 · v3 + · · ·+ αk · vk = 0
Dva linearne zavisle vektory se nazyvajı kolinearnı vektory (rovnobezne).
Vektory jsou linearne zavisle, pokud kazdy vektor lze napsat jako linearnı kombinaci zbylych vektoru.Tj. vektory v1,v2, . . .vk jsou zavisle, pokud vektor v1 je linearnı kombinacı vektoru v2,v3, . . .vk.
56 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 6 Vektory a vektorovy prostor 57
Prıklady:
1. vektory v1 = (1, 0) a v2 = (2, 0) jsou linearne zavisle, protoze zvolım α1 = 2 a α2 = −1 adostanu
4. vektory v1 = (1, 3) a v2 = (2, 4) nejsou linearne zavisle (jsou linearne nezavisle), protoze hledamα1 , α2 tak, aby
α1 · (1, 3) + α2 · (2, 4) = (0, 0)
tady resım soustavu
1 · α1 + 2 · α2 = 0
3 · α1 + 4 · α2 = 0
a najdu, ze jedinym resenım teto soustavy je
(α1, α2) = (0, 0)
5. Chapeme-li vektory graficky v prostoru R2 ev. R3 jsou smernice dvou linearne zavislych vektoru(kolinearnıch vektoru) jsou shodne. Vektory v1 a v2 jsou kolinearnı prave tehdy, kdyz existujeα ∈ R tak, ze
v1 = α · v2
57 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 6 Vektory a vektorovy prostor 58
Definice 6.5 Mnozinu linearne nezavislych vektoru v1,v2, . . .vk, takovych ze tyto vektory generujıcely prostor V, tj. ze
L (v1,v2, . . .vk) = V
nazyvame bazı vektoroveho prostoru.
Poznamky:
1. Baze vektoroveho prostoru jsou tedy vektory”pomocı“, kterych umıme vyjadrit vsechny ostatnı
vektory z vektoroveho prostoru.
2. Jestlize vektory e1, e2, . . . ek tvorı bazi vektoroveho prostoru, pak kazdy vektor v ∈ V lze napsatjako linearnı kombinaci bazickych vektoru
α1 · e1 + α2 · e2 + α3 · e3 + · · ·+ αk · ek = v
3. V jednom vektorovem prostoru muze existovat vıce bazı, dokonce techto bazı existuje nekonecne.
• Vektory (1, 0, 0), (0, 1, 0) a (0, 0, 1) tvorı bazi vektoroveho prostoru R3
• Vektory (1, 0, 0), (0, 1, 0) a (1, 1, 1) tvorı bazi vektoroveho prostoru R3
• Vektory (−1, 0, 0), (0,−1, 0) a (−2, 2, 5) tvorı bazi vektoroveho prostoru R3
• Vektory (1, 0, 0), (0, x, 0) a (0, 0, x2) tvorı bazi vektoroveho prostoru vsech polynomu stupnenejvyse 2.
Veta 6.1 Pocet prvku baze je roven dimenzi vektoroveho prostoru.
Aritmeticky vektorovy prostor zalozeny na souradnicıch v sobe jiz obsahuje bazi prostoru. Souradnicevektoru nam urcujı koeficienty α1, α2, . . . , αn z definice linearne zavislych vektoru.Pokud bychom zvolili jine bazicke vektory, dostaneme jine souradnice. System nenı invariantnı vucizmene souradnic.
58 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 6 Vektory a vektorovy prostor 59
6.4 Skalarnı soucin vektoru a norma vektoru, vektorovy soucin v R3
Vektorovy prostor Rn je prostor, ktery krome zakladnıch vlastnostı vektorovych prostoru splnuje jesteradu dalsıch
”dobrych“ vlastnostı.
1. V prostoru Rn jsou vzajemne jednoznacne”propojeny“ body a vektory. Libovolnym dvou bodum
A = (a1, a2, . . . , an) a B = (b1, b2, . . . , bn), muzeme priradit vektor vychazejıcı z bodu A asmerujıcı do bodu B,
v = −→v =−→AB = B − A = (b1 − a1, b2 − a2, . . . , bn − an)
Jedna se o afinnı prostor.
2. V prostoru umıme definovat normu (delku) vektoru
‖v‖ = |v| =√v2
1 + v22 + v2
3 + · · ·+ v2n
Jedna se o normovany linearnı prostor.
Libovolny vektor v muzeme normovat tak, ze vysledny vektor ma normu (delku) jedna:
u =v
|v|
3. V prostoru umıme definovat skalarnı soucin u,v ∈ Rn nasledujıcım zpusobem
ρ(u,v) = u · v = u1 · v1 + u2 · v2 + u3 · v3 + · · ·+ un · vn
Jedna se o prostor se skalarnım soucinem. V kazdem prostoru se skalarnım soucinem lze definovatnormu
‖v‖ =√ρ(u,v)
Jsou-li u,v ∈ R3 dva nenulove vektory, pak pro jejich skalarnı soucin platı
u · v = |u| · |v| · cosϕ,
kde ϕ je uhel, ktery dane vektory svırajı.
4. V prostorech se skalarnım soucinem definujeme pojem, kolme vektory.
Definice 6.6 Rekneme, ze dva nenulove vektory u,v ∈ Rn jsou kolme vektory, pokud
u · v = 0
59 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 6 Vektory a vektorovy prostor 60
V prostorech R2, resp. R3 jsou kolme vektory ty vektory, pro ktere platı
cosϕ =u · v|u| · |v|
= 0
tj. cosϕ = 0, specialne tedy vektory, ktere svırajı uhelπ
2= 90◦
5. Jsou-li vektory linearne nezavisle a kolme, nazyvame je ortogonalnı vektory. Baze tvorenaortogonalnımi vektory se nazyva ortogonalnı baze.
Jsou-li vektory navıc jednotkove (majı-li normu jedna), nazyvame je ortonormalnı vektory.Baze tvorena ortonormalnımi vektory se nazyva ortonormalnı baze.
6. V prostoru R3 lze definovat tez vektorovy soucin
Definice 7.1 Maticı A typu m × n nazyvame schema slozene z m · n prvku (realnych, komplexnıch,celych cısel, . . . ), ktere jsou usporadany do m radu a n sloupcu.
Pıseme A =
a11 a12 . . . a1n
......
am1 . . . amn
= (aij)i=1...mj=1...n
• cıslo aij nazyvame prvkem matice;
• index i oznacuje cıslo radku (radkovy index);
• index j oznacuje cıslo sloupce (sloupcovy index).
Prıklad: 1 2 3 4
5 6 3.7 0
4 −2 8 −7.89
Dalsı pojmy:
• Prvky se stejnym radkovym a sloupcovym indexem ai i nazveme diagonalnı prvky a jejich spojnicinazveme hlavnı diagonalou matice A.
• Prvky s indexy ai n−i nazveme prvky vedlejsı diagonaly.
• Matice se nazyva ctvercovou maticı, pokud n = m, cıslo n se nazyva rad matice.
• Nulova matice je matice Am,n, jejız vsechny prvky jsou nulove, nulovou matici znacıme O.
• Matice, ktera ma na hlavnı diagonale prvnıch h prvku (h ≤ m,h ≤ n) nenulovych a ostatnıprvky nulove se nazyva diagonalnı matice.
• Trojuhelnıkova matice je matice, v nız jsou prvky po jedne strane hlavnı diagonaly rovny nule.Jsou-li prvky pod hlavnı diagonalou rovny nule, mluvıme o hornı trojuhelnıkove matici. Jsou-liprvky nad hlavnı diagonalou rovny nule, mluvıme o dolnı trojuhelnıkove matici.
• Ctvercova diagonalnı matice, ktera ma diagonalnı prvky rovny jednicce, se nazyva jednotkovamatice a znacı se In nebo En.
I4 =
1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1
• Ctvercova matice A = (aij)i,j=1...n se nazyva symetricka matice, pokud pro jejı prvky platıai,j = aj,i.
• Ctvercova matice A = (aij)i,j=1...n se nazyva antisymetricka matice, pokud pro jejı prvky platıai,j = −aj,i. Z definice plyne, ze diagonalnı prvky antisymetricke matice musı byt rovny nule.
7.1 Operace s maticemi
Mezi zakladnı operace s maticemi patrı: transpozice matic, scıtanı a odcıtanı matic se stejnymirozmery, nasobenı matice realnym (komplexnım) cıslem, nasobenı dvou matic (pokud majı prıslusnerozmery).
Definice 7.2 Necht’ je dana matice A = (aij)i=1...mj=1...n typu m×n, pak matici s prvky (bij = aji) nazveme
transponovanou maticı k matici A a znacıme ji AT . (Transponovana matice vznikne”
prehozenımradku a sloupcu“ puvodnı matice)
A =
(1 0 −2 −4
5 6 0 3
)AT =
1 5
0 6
−2 0
−4 3
Definice 7.3 Scıtanı matic, odcıtanı matic a nasobenı matic konstantou Necht’ jsou danydve matice A,B stejnych rozmeru, pak matici s prvky ai j+bi j nazveme souctem matic A a B. ZnacımeA+B. (pri scıtanı provadıme operaci scıtanı prvek po prvku).Analogicky definujeme odcıtanı matic a nasobenı matic realnym cıslem (komplexnım cıslem, konstan-tou).(
1 0 −2
−5 −6 0
)+
(1 5 5
0 6 0
)=
(1 + 1 0 + 5 −2 + 5
−5 + 0 −6 + 6 0 + 0
)=
(2 5 3
−5 0 0
)
Pokud matice nemajı stejny rozmer, nelze odcıtat nebo scıtat:
Pri nasobenı matice konstantou zapisujeme λ · A a nasobıme opet prvek po prvku:
10 ·
(1 0 −2
−5 −6 0
)=
(10 0 −20
−50 −60 0
)
Veta 7.1 Pro scıtanı, odcıtanı a nasobenı matic konstantou platı nasledujıcı vztahy (predpoklademje, ze matice A,B a C majı stejne rozmery, r, s jsou realna (resp. komplexnı) cısla):
• A+B = B + A komutativnı zakon
• (A+B) + C = A+ (B + C) asociativnı zakon
• (A+B)T = AT +BT
• A+ 0 = 0 + A = A
• r A+ sA = (r + s)A distributivnı zakon
• r (A+B) = r A+ r B distributivnı zakon
• (r A)T = r AT
• (−1)A = −A
Definice 7.4 Necht’ matice A je matice s rozmery m× n a matice B je matice s rozmery n× p, pak
soucinem matic A ·B nazveme matici C s prvky cij =n∑k=1
aikbkj.
Vysledna matice C = A ·B ma rozmery m× p
Nasobek matic vznikne tak, ze prvek ci j matice soucinu je roven skalarnımu soucin i− teho radkuprvnı matice a j− teho sloupce druhe matice.
3 2 1
0 8 5
1 −1 0
0 0 1
·
7 8
6 1
0 1
=
21 + 12 + 0 24 + 2 + 1
0 + 48 + 0 0 + 8 + 5
7− 6 + 0 8− 1 + 0
0 + 0 + 0 0 + 0 + 1
=
33 27
48 13
1 7
0 1
POKUD NESOUHLASI ROZMERY MATIC, NELZE MATICE NASOBIT !
• pro n > 2 detA rozvojem podle zvoleneho radku nebo sloupce
detA = ai1 · (−1)i+1 · detAi1 +
+ ai2 · (−1)i+2 · detAi2 +
+ ai3 · (−1)i+3 · detAi3 +
+ . . . +
+ ain · (−1)i+n · detAin
kde detAij je subdeterminant matice Aij, ktera vznikne
vynechanım i-teho radku a k-teho sloupce matice A.
Prıklad na vypocet determinantu matice rozvojem podle prvnıho radku:∣∣∣∣∣∣∣∣1 2 3
4 5 6
7 8 9
∣∣∣∣∣∣∣∣ = 1 ·det
(5 6
8 9
)−2 ·det
(4 6
7 9
)+ 3 ·det
(4 5
7 8
)= 1 · (−3)−2 · (−6) + 3 · (−3) = 0
Nedostatkem teto definice je jejı nejednoznacnost, nenı urceno podle ktereho radku delam rozvoj.Lze dokazat, ze vysledek vypoctu nezavisı na zvolenem radku a navıc lze determinant matice pocıtatstejnym postupem rozvojem podle libovolne zvoleneho sloupce.
Pri vypoctu determinantu rozvojem je jedno podle ktereho sloupce nebo radku rozvojprovedu.Obvykle VOLIM SLOUPEC nebo RADEK s NEJVETSIM POCTEM NUL !
Definice 8.2 Elementarnı radkove (sloupcove) upravy matic jsou operace
1. Zmena poradı radku (sloupcu).
2. Vynasobenı radku (sloupce) nenulovym cıslem.
3. Prictenı nasobku nektereho radku k jinemu radku (totez pro sloupce).
Definice 8.3 Hodnost matice A typu m×n je pocet nenulovych radku trojuhelnıkove matice B, kteravznikne z matice A pomocı elementarnıch radkovych a sloupcovych uprav.Prevod matice na trojuhelnıkovou matici se nazyva Gaussova eliminacnı metoda.Vznikne-li matice C z matice A pomocı elementarnıch uprav, rıkame, ze C je ekvivalentnı s A.
• Hodnost matice je tedy cıslo h(A), hodnost nenulove matice je v rozmezı hodnot 1 az m
• Hodnost matice nezavisı na poradı elementarnıch uprav, kazdou nenulovou matici lze pomocıGaussovy eliminacnı metody upravit na hornı trojuhelnıkovou matici.
• Hodnost matice A je rad nejvetsıho nenuloveho subdeterminantu matice.
Subdeterminantem radu k rozumıme determinant matice vznikle z matice A vyberem prvku vezvolenych k radcıch a k sloupcıch.
Z prvnı rovnice vyjadrım prvnı neznamou a dosadım do dalsıch rovnic, tım zmensım pocet rovnic nam− 1, postup opakuji dokud nemam pouze jednu linearnı rovnici.
8.3.3 Gaussovou eliminacnı metodou
Upravuji rozsırenou matici soustavy na hornı trojuhelnıkovy tvar.
Veta 8.1 Frobeniova veta. Soustava m linearnıch rovnic o n neznamych ma alespon jedno resenı,prave kdyz hodnost matice soustavy se rovna hodnosti rozsırene matice soustavy.
Pro soustavu Ax = b s n neznamymi platı:
• h(A) = h(A|B) = n⇒ soustava ma prave jedno resenıa11 a12 . . . a1n | b1
Veta 8.3 Necht’ soustava Ax = b zahrnujıcı n rovnic o n neznamych ma regularnı matici (detA 6=0).Pak existuje inverznı matice k matici A a soustava ma jedine resenı
Pohybujeme se v prostoru R2 a predpokladame, ze pracujeme s bazickymi vektory e1 = (1, 0) ae2 = (0, 1). Graficky temto bazickym vektorum odpovıdajı souradne osy. Vzhledem k tomu, ze bazickevektory e1 a e2 jsou kolme (jejich skalarnı soucin je roven nule) tvorı tento system tzv. kartezsky systemsouradnic.Souradnice se protınajı v bode 0.Kazdy bod z prostoru R2 charakterizujeme tedy jejich souradnicemi, ktere vyjadrujı koeficientylinearnı kombinace bazickych vektoru
(x, y) = v1 · e1 + v2 · e2.
Vzdalenost dvou bodu a = (ax, ay) a b = (bx, by)v prostoru R2 odpovıda odpovıda norme vektorudaneho temito body.
d(a,b) = ‖b− a‖ =√
(bx − ax)2 + (by − ay)2
Pomocı vektoroveho a maticoveho poctu muzeme naprıklad spocıtat obsah mnohouhelnıka. Pro obsahmnohouhelnıky s vrcholy (ax, ay), (bx, by), (cx, cy), . . . (zx, zy) platı
P =1
2
∣∣∣∣∣det
(ax bx
ay by
)+ det
(bx cx
by cy
)+ · · ·+ det
(zx ax
zy ay
)∣∣∣∣∣Obsah trojuhelnıka s vrcholy (ax, ay), (bx, by) a (cx, cy) je roven
P4 =1
2
∣∣∣∣∣∣∣∣det
ax ay 1
bx by 1
cx cy 1
∣∣∣∣∣∣∣∣
9.1.1 Smernicova, usekova, obecna a vektorova rovnice prımky
Veta 9.1 Mejme dve prımky dane ve smernicovem tvaru y = k1 x+q2 a y = k2 x+q2 resp. v obecnemtvaru a1x+ b1y + c1 = 0 a a2x+ b2y + c2 = 0. Pak
• prımky jsou rovnobezne splyvajıcı, jestlize je jedna rovnice nasobkem druhe;
• prımky jsou rovnobezne, jestlize k1 = k2 resp. a1b2 + a2b1 = 0(normalove, resp. smerove vektory jsou zavisle);
• prımky jsou kolme, jestlize k2 = − 1
k1
resp. a1a2 + b1b2 = 0
(skalarnı soucin normalovych, resp. smerovych vektoru je roven nule).
9.1.4 Transformace kartezskych souradnic
Pri prechodu (transformaci) od jedne kartezske (ortonormalnı) soustavy k druhe kartezske soustavepouzijeme pouze operace posun a otocenı (rotace) o uhel α.
Veta 9.2 Pri prechodu od kartezskych (0;x; y) ke stejne orientovane kartezske soustave souradnic(0′;x′; y′) se souradnice transformujı podle vztahu
x′ = x cosα + y sinα−m′
y′ = −x sinα + y cosα− n′
resp.
x = x′ cosα− y′ sinα +m
y = x′ sinα + y′ cosα + n
kde m,n jsou souradnice noveho pocatku 0′ v soustave (0;x; y), m′ = m cosα+n sinα a n′ = −m sinα+n cosα a α je uhel otocenı os souradnic.
Pohybujeme se v prostoru R2 a predpokladame, ze pracujeme s bazickymi vektory e1 = (1, 0, 0),e2 = (0, 1, 0) a e3 = (0, 0, 1). Graficky temto bazickym vektorum odpovıdajı souradne osy. Vzhledemk tomu, ze bazicke vektory e1, e2 a e3jsou kolme (jejich skalarnı souciny jsou rovny nule) tvorı tentosystem tzv. kartezsky system souradnic.Souradnice se protınajı v bode 0 = (0, 0, 0).Kazdy bod z prostoru R3 charakterizujeme tedy jejich souradnicemi, ktere vyjadrujı koeficientylinearnı kombinace bazickych vektoru
(x, y, z) = v1 · e1 + v2 · e2 + v3 · e3.
Vzdalenost dvou bodu a = (ax, ay, az) a b = (bx, by, bz)v prostoru R3 odpovıda odpovıda normevektoru daneho temito body.
d(a,b) = ‖b− a‖ =√
(bx − ax)2 + (by − ay)2 + +(bz − az)2
Obsah ctyrstenu s vrcholy (ax, ay, az), (bx, by, bz), (cx, cy, cz) a (dx, dy, dz)je roven
P =1
6
∣∣∣∣∣∣∣∣∣∣det
ax ay az 1
bx by bz 1
cx cy cz 1
dx dy dz 1
∣∣∣∣∣∣∣∣∣∣
Objem ctyrstenu je roven nule prave tehdy, kdyz lezı vsechny ctyri body v jedne rovine.
9.2.1 Obecna, usekova a parametricka rovnice roviny
Rovnice roviny je mnozina bodu ρ ={
(x, y, z) ∈ R3; . . .}
splnujıcı predpis:
Obecna rovnice roviny Ax+By+Cz +D = 0, kde alespon jedno z cısel A,B,C je ruzne od nuly
Usekova rovnicex
p+y
q+z
r= 1,
Parametricka rovnice
x = ax + s1t1 + r1t2
y = ay + s2t1 + r2t2
z = az + s3t1 + r3t2,
kde t1, t2 ∈ R a rovina prochazı bodem A = (ax, ay, az) a s = (s1, s2, s3), r = (r1, r2, r3) jsou jejısmerove vektory.
• koeficienty a, b, c urcujı souradnice normaloveho vektoru n = (a, b, c), pozor smerovy vektornenı urcen jednoznacne, rovina ma DVA smerove vektory (vektory kolme na normalovy);
• pokud a = 0 je rovina rovnobezna s osou x
• pokud b = 0 je rovina rovnobezna s osou y
• pokud c = 0 je rovina rovnobezna s osou z
• pokud d = 0 prochazı rovina pocatkem (0, 0)
• pokud a = b = 0 je rovina rovnobezna se souradnou rovinou urcenou osami x, y
2. usekovy tvar: p, q, r jsou useky, ktere vytına rovina na osach souradnic s prihlednutım k jejichorientaci - naprıklad p = −3 znamena, ze rovina protına zapornou poloosu −x ve vzdalenosti 3,tj. rovina prochazı bodem (−3, 0, 0)
Rovina v prostoru je jednoznacne urcena:
• tremi ruznymi body, ktere nelezı na jedne prımce;
• dvema ruznobeznymi prımkami;
• dvema ruznymi rovnobeznymi prımkami;
• bodem a prımkou, ktera danym bodem neprochazı.
9.2.2 Odchylka dvou rovin, vzdalenost bodu od roviny, poloha dvou rovin
Jsou-li n1 a n2 normalove vektory dvou rovin ρ a σ, potom pro odchylku ϕ techto dvou rovin platı
cosϕ =|n1 · n2|‖n1‖ · ‖n2‖
,
kde v citateli je absolutnı hodnota skalarnıho soucinu vektoru n1 a n2.Vzdalenost bodu x0, y0, z0 od roviny ax+ by + cz + d = 0 je
d =
∣∣∣∣ax0 + by0 + cz0 + d√a2 + b2 + c2
∣∣∣∣ .Vzajemna poloha dvou rovin je analogicka vzajemnym poloham prımek v prostoru
kde t ∈ R a prımky prochazı bodem A = (ax, ay, az) a jejı smerovy vektor je s = (s1, s2, s3).
Kanonicky tvar rovnicex− axs1
=y − ays2
=z − azs3
Obecny tvar rovnice (prusecnice dvou ruznobeznych rovin)
A1x+B1y + C1z +D1 = 0 a A2x+B2y + C2z +D2 = 0
Prımky v prostoru mohou byt:
• rovnobezne splyvajıcı - smerove vektory jsou linearne zavisle a prımky majı nekonecne mnohospolecnych bodu;
• rovnobezne nesplyvajıcı - smerove vektory jsou linearne zavisle a prımky nemajı spolecny bod;
• ruznobezne - smerove vektory jsou linearne nezavisle a prımky majı prave jeden spolecny bod;
• ruznobezne kolme - ruznobezne a skalarnı soucin smerovych vektoru je roven nule;
• mimobezne - smerove vektory jsou linearne nezavisle a prımky nemajı spolecny bod.
90 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 10 Limita funkce v bode x0 ∈ R ∪ {−∞; +∞} 91
10 Limita funkce v bode x0 ∈ R ∪ {−∞; +∞}
10.1 Definice limity funkce
Definice 10.1 Vlastnı limita ve vlastnım bode limx→x0
f(x) = A.
Rekneme, ze funkce f(x) ma v bode x0 ∈ R vlastnı limitu, pokud existuje cıslo A ∈ R, tak, ze
Cauchyova definice
∀ε > 0,∃ δ > 0 tak, ze pro ∀x : x ∈ (x0 − δ, x0 + δ), platı f(x) ∈ (A− ε, A+ ε)
Heinova definice
∀ {xn}+∞n=1 ∈ D(f) takove, ze lim
n→+∞xn = x0, platı lim
n→+∞f(xn) = A
Poznamky:
1. Obe definice limit jsou ekvivalentnı. Rozdıl v prıstupu ukazema na prıkladu, kdy funkce f(x)ma ve vlastnım bode x0 vlastnı limitu A.
• Cauchyova definice pracuje s okolım: Vlastnı limita A ve vlastnım bode x0 existuje, pokudkdyz zvolım libovolne okolı bodu A - oznacıme (U(A, ε)), pak vzdy existuje okolı bodu x0
oznacım (U(x0, δ)) takove, ze pro vsechny body z tohoto okolı (U(x0, δ)) platı, ze f(x) lezıv okolı bodu A, tj. v okolı U(A, ε).
• Heinova definice pracuje s hromadnym bodem (bod, ke kteremu se blızı nejaka posloupnostbodu xn) a limitou funkcnıch hodnot posloupnosti f(xn). Vlastnı limita A ve vlastnım bodex0 existuje, pokud pro kazdou posloupnost bodu limitne smerujıcıch do x0 platı, ze jejichfunkcnı hodnoty f(xn) limitne smerujı do A.
91 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 10 Limita funkce v bode x0 ∈ R ∪ {−∞; +∞} 92
• Existujı funkce, ktere nemajı limitu ve sledovanem bode x0. Naprıklad funkce sgnx nemalimitu v bode x0 = 0.
Vyberu posloupnost
xn =
{(−1
2
)n}=
{−1
2,+
1
4,−1
8,+
1
16, . . .
},
tato posloupnost se limitne blızı k nule, limn→+∞
xn = 0, ale posloupnost funkcnıch hodnot
ma tvarf(xn) = {−1,+1,−1,+1, . . . }
a tato posloupnost nema limitu.
Proto ma nekdy smysl zkoumat chovanı funkce zvlast’ pro body blızıcı se k bodu x0 zlevaa zvlast’ pro body blızıcı se k bodu x0 zprava.
92 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 10 Limita funkce v bode x0 ∈ R ∪ {−∞; +∞} 93
Definice 10.2 Vlastnı limita ve vlastnım bode zprava limx→x0+
f(x) = A.
Rekneme, ze funkce f(x) ma v bode x0 ∈ R vlastnı limitu zprava, pokud existuje cıslo A ∈ R, tak, ze
Cauchyova definice
∀ε > 0,∃ δ > 0 tak, ze pro ∀x : x ∈ (x0, x0 + δ), platı f(x) ∈ (A− ε, A+ ε)
Heinova definice
∀ {xn}+∞n=1 ∈ D(f) takove, ze xn ≥ x0 a lim
n→+∞xn = x0, platı lim
n→+∞f(xn) = A
Vlastnı limita ve vlastnım bode zleva limx→x0−
f(x) = A. Definuji analogicky.
Definice 10.3 Nevlastnı limita ve vlastnım bode limx→x0
f(x) = +∞ nebo limx→x0
f(x) = −∞
Cauchyova definice
∀K, ∃ δ > 0 tak, ze pro ∀x : x ∈ (x0 − δ, x0 + δ), platı f(x) ∈ (K,+∞)
Heinova definice
∀ {xn}+∞n=1 ∈ D(f) takove, ze lim
n→+∞xn = x0, platı lim
n→+∞f(xn) = +∞
Nevlastnı limity zleva a zprava definuji analogicky.
Limita je v bode x0 je +∞ a limita je v bode x0 je −∞
93 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 10 Limita funkce v bode x0 ∈ R ∪ {−∞; +∞} 94
Limita je v bode x0 neexistuje, ale limita zprava je −∞ a limita zleva je +∞
Limita je v bode x0 neexistuje, ale limita zprava je −∞ a limita zleva je vlastnı (konecna) A
94 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 10 Limita funkce v bode x0 ∈ R ∪ {−∞; +∞} 95
Definice 10.4 Vlastnı limita v nevlastnım bode limx→+∞
f(x) = A
Cauchyova definice
∀ε > 0,∃M tak, ze pro ∀x : x ∈ (M,+∞), platı f(x) ∈ (A− ε, A+ ε)
Heinova definice
∀ {xn}+∞n=1 ∈ D(f) takove, ze xn ≥ x0 a lim
n→+∞xn = +∞, platı lim
n→+∞f(xn) = A
Vlastnı limita v nevlastnım bode −∞ definuji analogicky limx→−∞
f(x) = A
Limity zleva a zprava nema smysl definovat, protoze do nevlastnıho bodu se lze limitne dostat pouze zjedne strany. Do bodu +∞ se limitne blızıme zleva a do bodu −∞ se limitne blızıme zleva.
Prıklad funkcı limx→+∞
f(x) = A a funkce, ktera nema limitu v bode +∞
95 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 10 Limita funkce v bode x0 ∈ R ∪ {−∞; +∞} 96
Definice 10.5 Nevlastnı limita v nevlastnım bode limx→+∞
f(x) = +∞
Cauchyova definice
∀ε > 0,∃M tak, ze pro ∀x : x ∈ (M,+∞), platı f(x) ∈ (A− ε, A+ ε)
Heinova definice
∀ {xn}+∞n=1 ∈ D(f) takove, ze xn ≥ x0 a lim
n→+∞xn = +∞, platı lim
n→+∞f(xn) = A
Nevlastnı limity ve nevlastnıch bodech definuji analogicky. limx→−∞
f(x) = +∞, limx→+∞
f(x) = −∞,
limx→−∞
f(x) = −∞.
Prıklad funkcı s nevlastnı limitou v nevlastnım bode
96 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 10 Limita funkce v bode x0 ∈ R ∪ {−∞; +∞} 97
10.2 Vlastnosti limit funkcı
Veta 10.1 Funkce f ma v bode x0 nejvyse jednu limitu.
Veta 10.2 Funkce f ma v bode limitu prave tehdy, kdyz limita zleva se rovna limite zprava.
limx→+x0
f(x) = limx→−x0
f(x) = A⇔ limx→x0
f(x) = A
Veta 10.3 Algebra vlastnıch limit Jestlize funkce f, g majı vlastnı limity limx→x0
f(x) = A a
limx→x0
g(x) = B v bode x0 (bod muze byt vlastnı i nevlastnı), pak platı
1. limx→x0
(f(x)± g(x)) = A±B
2. limx→x0
(f(x) · g(x)) = A ·B
3. limx→x0
(f(x)
g(x)
)=A
Bpro B 6= 0
Veta 10.4 O limite sevrene funkce Jestlize, v okolı bodu x0 platı d(x) ≤ f(x) ≤ h(x) a platılimx→x0
d(x) = limx→x0
h(x) = A, pak
limx→x0
f(x) = A.
Veta 10.5 O limite slozene funkce Jsou dany dve funkce f : Df → Hf a g : Dg → Hg. Jestlizeplatı Dg ⊂ Hf a lim
x→x0f(x) = y0 a lim
y→y0g(y) = A, pak
limx→x0
g (f(x)) = A
Prıklady vyuzitı teto vety:
• limx→+∞
f(x) = limy→+0
f
(1
y
)
• limx→x0
(f(x))n =
(limx→x0
f(x)
)npro f(x) ≥ 0, n ∈ N
• limx→x0
n√f(x) = n
√limx→x0
f(x) pro f(x) ≥ 0, n ∈ N
• limx→x0
αf(x) = αlim
x→x0f(x)
pro α > 0
• jestlize, limx→x0
|f(x)| = 0, pak limx→x0
f(x) = 0
97 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 10 Limita funkce v bode x0 ∈ R ∪ {−∞; +∞} 98
10.3 Nektere limity vybranych funkcı
• limx→±∞
(1 +
a
x
)x= lim
x→±0(1 + ax)
1x = ea
• limx→+∞
ax = 0, limx→−∞
ax = +∞ pro 0 < a < 1
• limx→+∞
ax = +∞, limx→−∞
ax = 0 pro a > 1
• limx→0
sinx
x= 1
• limx→+∞
sinx
x= 0
• limx→0
sin ax
x= a
• limx→0
tgax
x= a
• limx→0
ex − 1
x= 1
• limx→0
ax − 1
x= ln a pro a > 0
• limx→0
ln(x+ 1)
x= 1
• limx→+∞
xa
ebx= 0 pro a ∈ R, b > 0
98 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 10 Limita funkce v bode x0 ∈ R ∪ {−∞; +∞} 99
10.4 Neurcite vyrazy - specialnı typy limit
Pro neurcite vyrazy, tj. limity podılu, rozdılu, nasobku a pod. dvou funkcı, kdy jedna nebo obe z limitjsou nekonecno, lze vypocıtat s pouzitım derivacı (viz. kapitola 13.).
• limita typu 0/0 nebo ∞/∞ (l’Hospitalova pravidla)Jestlize lim
x→af(x) = lim
x→ag(x) = 0 a existuje lim
x→af ′(x)/g′(x), pak existuje lim
x→af(x)/g(x) a platı
limx→a
f ′(x)
g′(x)= lim
x→a
f(x)
g(x)Jestlize lim
x→a|g(x)| = +∞ a existuje lim
x→af ′(x)/g′(x), pak existuje lim
x→af(x)/g(x) a platı
limx→a
f ′(x)
g′(x)= lim
x→a
f(x)
g(x)
• limita typu 0 · ∞ prevedeme na limitu typu 0/0 nebo ∞/∞:
limx→a
f(x) · g(x) = limx→a
f(x)1
g(x)
• limity typu 0∞, ∞0 a 1∞ prevedeme na limitu typu 0/0 nebo ∞/∞:limx→a
f(x)g(x) = limx→a
eg(x)·ln(f(x))
• limity typu ∞−∞ prevedeme na limitu typu 0/0 nebo ∞/∞:
limx→a
f(x)− g(x) = limx→a
1g(x)− 1
f(x)
1f(x)·g(x)
• nebo u limit typu ∞−∞ vyuzijeme vztah a− b =a2 − b2
a+ ba dostavame
limx→a
f(x)− g(x) = limx→a
f 2(x)− g2(x)
f(x) + g(x)
99 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 11 Spojitost realne funkce realne promenne 100
11 Spojitost realne funkce realne promenne
11.1 Spojitost v bode x0.
Definice 11.1 Necht’ f : D ⊂ R→ R je realna funkce a bod x0 je hromadny bod Df . Pak rekneme,ze funkce f je spojita funkce v bode x0, pokud limita funkce f v bode x0 je rovna funkcnı hodnote vdobe x0.
f je spojita v x0def←→ lim
x→x0f(x) = f(x0)
Obdobne definujeme spojitost zleva a spojitost zprava v bode x0
f je spojita zleva v x0def←→ lim
x→x0−f(x) = f(x0)
f je spojita zprava v x0def←→ lim
x→x0+f(x) = f(x0)
Hromadny bod je takovy bod mnoziny, ke kteremu existuje konvergentnı posloupnost. Pokud bod nenıhromadny, rıkame, ze se jedna o izolovany bod.Rekneme, ze funkce je spojita v izolovanem bode, pokud je v tomto bode definovana.Funkce je spojita v bode x0 prave tehdy, kdyz je spojite zleva a zaroven zprava v danem bode x0.Funkce nenı spojita v hromadnem bode x0, pokud limita v tomto bode neexistuje nebo nenı konecna.
Veta 11.1 (Lokalnı vlastnosti spojitych funkcı) Necht’ funkce f je spojita v bode x0, pak
(A) existuje okolı bodu x0, ve kterem je funkce omezena
(B) pokud f(x0) 6= 0, existuje okolı, ve kterem funkce f zachovava znamenko.
Veta 11.2 (Algebraicke vlastnosti spojitych funkcı a spojitost slozene funkce).
• Jsou-li funkce f a g spojite v bode x0, pak funkce f ± g, f · g , |f | af
g, g(x) 6= 0 jsou spojite
v bode x0.
• Je-li funkce f spojita v bode x0 a funkce g spojita v bode f(x0), pak funkce g(f(x)) je spojitav bode x0.
100 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 11 Spojitost realne funkce realne promenne 101
11.2 Body nespojitosti
Definice 11.2 Necht’ funkce f nenı spojita v hromadnem dobe x0, pak bod x0 je bodem nespojitosti.Bod nespojitosti muze byt nasledujıcıho druhu.
(A) Odstranitelna nespojitost, pokud limx→x0−
f(x) a limx→x0+
f(x) jsou konecne a shodne.
(B) Bod nespojitosti prvnıho druhu - skok, pokud limx→x0−
f(x) a limx→x0+
f(x) jsou konecne a ruzne.
(C) Bod nespojitosti druheho druhu, pokud alespon jedna z limit limx→x0−
f(x) a limx→x0+
f(x) je nekonecna
nebo neexistuje.
Body nespojitosti prvnıho druhu a druheho druhu jsou neodstranitelne body nespojitosti.
Odstranitelna nespojitost
Nespojitost I. druhu
101 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 11 Spojitost realne funkce realne promenne 102
Nespojitost II. druhu
11.3 Spojitost funkce v uzavrenem intervalu I = 〈a; b〉Definice 11.3 Funkce f je spojita v uzavrenem intervalu I = 〈a; b〉, prave tehdy kdyz je spojita vkazdem vnitrnım bode intervalu a v krajnıch bodech je spojita zleva resp. zprava.
f je spojita v I = 〈a; b〉 def←→ f je spojita v kazdem x ∈ (a, b) a je spojita zleva v a a zprava v b
Veta 11.3 Necht’ funkce f je spojita na intervalu 〈a; b〉 a platı f(a) · f(b) < 0, pak existuje bodc ∈ 〈a; b〉 takovy, ze f(c) = 0.
Dusledek: (Resitelnost nelinarnıch rovnic) Necht’ funkce f je spojita 〈a; b〉 a necht’ f(a) 6= f(b), pakpro libovolne y0 ∈ 〈f(a); f(b)〉, existuje alespon jedno x0 takove, ze y0 = f(x0).
Veta 11.4 Weiestrassova veta. Je-li funkce f spojita na intervalu 〈a; b〉, pak je funkce f na tomtointervalu omezena.
POZOR: Implikace naopak neplatı. Funkce omezena na intervalu ; funkce spojita na intervalu.
Veta 11.5 Globalnı vlastnosti
1. Je-li funkce f spojita na intervalu 〈a; b〉, pak je f(〈a; b〉) opet interval nebo jednobodova mnozina.
2. Je-li f ostre monotonnı na intervalu I a f(I) je opet interval, pak f je spojita.
3. Je-li f spojita a prosta na intervalu I, pak existuje funkce inverznı a je take spojita na f(I).
102 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 12 Derivace realne funkce realne promenne 103
12 Derivace realne funkce realne promenne
12.1 Definice diferencnıho podılu a derivace a jejich geometricka inter-pretace
Definice 12.1 Diferencnı podıl funkce f v bode x0. Pomer prırustku (diferencı) ∆f funkce f aprırustku (diference) ∆x argumentu x.
∆f
∆x=f(x0 + ∆x)− f(x0)
x− x0
Diferencnı podıl udava smernici secny P0P , kde bod P0 = [x0, f(x0)] a bod P = [x, f(x)].
Definice 12.2 Existuje-li vlastnı, resp. nevlastnı limita
lim∆x→0
∆f
∆x= lim
∆x→0
f(x0 + ∆x)− f(x0)
∆x= lim
x→x0
f(x)− f(x0)
x− x0
rıkame, ze funkce f ma v bode x0 vlastnı, resp. nevlastnı derivaci.
Tuto limitu oznacujeme f ′(x0) nebodf
dx(x0) nebo
df
dx
∣∣∣∣x0 nebo∂f
∂x(x0) nebo
∂f
∂x
∣∣∣∣x0 nebo f(x0).
Mısto o vlastnı derivaci mluvıme take o konecne derivaci nebo jenom o derivaci v bode x0.Derivace funkce f v bode x0 udava smernici tecny krivky dane rovnicı y = f(x) v bode P0 = [x0, f(x0)].Existuje-li vlastnı limita
limx→x0−
f(x)− f(x0)
x− x0
resp.
limx→x0+
f(x)− f(x0)
x− x0
v bode x0, nazyvame ji vlastnı derivacı zleva resp. zprava.Obdobne definujeme nevlastnı derivaci v bode zleva a zprava.
Diference a derivace funkce
103 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 12 Derivace realne funkce realne promenne 104
Definice 12.3 Funkce f je diferencovatelna v uzavrenem intervalu 〈a; b〉 prave tehdy, kdyz ma vlastnıderivaci v kazdem vnitrnım bode intervalu a v krajnıch bodech ma derivaci zleva resp. zprava. Funkce,jejız funkcnı hodnota v kazdem bode x ∈ (a, b) je f ′(x) se nazyva derivace funkce f na intervalu (a, b).
Pro uzavreny interval dodefinujeme funkcnı hodnoty f ′(x) v krajnıch bodech zleva a zprava.Funkce, ktera ma na intervalu 〈a; b〉 spojitou derivaci se nazyva spojite diferencovatelna funkce (hladkefunkce) na intervalu 〈a; b〉.Znacıme C(〈a; b〉) nebo C1(〈a; b〉).
Veta 12.1 (Souvislost existence vlastnı derivace a spojitosti) Jestlize funkce f ma vlastnı derivaci vbode x0, pak je funkce v bode x0 spojita.
POZOR: Obracena implikace neplatı. Funkce spojita v bode x0 ; funkce ma v bode x0 vlastnı derivaci.Naprıklad funkce f(x) = |x| v bode x0 = 0.
Prıklad spojite funkce, ktera ma derivaci v bode a nema derivaci v bode
Definice 12.4 (Derivace vyssıch radu) Existuje-li vlastnı, resp. nevlastnı limita
limx→x0
f ′(x)− f ′(x0)
x− x0
= f ′′(x0)
rıkame, ze funkce f ma v bode x0 vlastnı, resp. nevlastnı druhou derivaci.
Tuto limitu oznacujeme f ′′(x0) nebod2f
dx2(x0) nebo
d2f
dx2
∣∣∣∣x0 nebo∂2f
∂x2(x0) nebo
∂2f
∂x2
∣∣∣∣x0 nebo f(x0).
Obdobne definujeme derivace n−teho radu f (n)((x0), resp.dnf
dxn(x0)
104 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 12 Derivace realne funkce realne promenne 105
12.2 Pravidla pro derivovanı
Veta 12.2 Pravidla pro derivovanı. Necht’ u, v, f, g, u1, u2, . . . jsou diferencovatelne funkce promennex.
1. (konst)′ = 0
2. (u1 + u2 + . . .)′ = u′1 + u′2 + . . .
3. (u · v)′ = u′ · v + u · v′
4. (u
v)′ =
u′v − uv′
v2pro v(x) 6= 0
5. (f(g(x)))′ = f ′(g(x))g′(x) (derivace slozene fce)
6. (ln f(x))′ =f ′(x)
f(x)pro f(x) > 0
7. (f g)′ =(eg·ln(f)
)′= f g
(g′ ln (f) + g
1
ff ′)
pro f(x) > 0
8. jestlize x = g(y) je inverznı funkce k funkci y = f(x) a existuje-li v bode c derivace f ′(c) 6= 0,pak v bode d = f(c) existuje g′(d) a platı
g′(d) =1
f ′(c)
105 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 12 Derivace realne funkce realne promenne 106
12.3 Prehled derivacı elementarnıch funkcı
• (xn)′ = nxn−1 pro n ∈ N
• (x−n)′ = −nx−n−1 pro n ∈ N, x 6= 0
• (xa)′ = axa−1 pro a ∈ R, x > 0
• (ax)′ = ax ln a pro a > 0
• specialne (ex)′ = ex
• (loga x)′ =1
x ln apro x > 0, a > 0, a 6= 1
• specialne (ln x)′ =1
x
• (sinx)′ = cosx
• (cosx)′ = − sinx
• (tgx)′ =1
cos2 xpro x 6= (2k + 1)
π
2; k ∈ Z
• (cotgx)′ = − 1
sin2 xpro x 6= kπ; k ∈ Z
• (arcsinx)′ =1√
1− x2pro |x| < 1
• (arccosx)′ = − 1√1− x2
pro |x| < 1
• (arctgx)′ =1
1 + x2
• (arccotgx)′ = − 1
1 + x2
• (sinhx)′ = coshx
• (coshx)′ = sinhx
• (tghx)′ =1
cosh2 x
• (cotghx)′ = − 1
sinh2 xpro x 6= 0
106 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 12 Derivace realne funkce realne promenne 107
• (argsinhx)′ =1√
1 + x2
• (argcoshx)′ =1√
x2 − 1pro x > 1
• (argtghx)′ =1
1− x2pro |x| < 1
• (argcotghx)′ =1
1− x2pro |x| > 1
107 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 13 Vyuzitı derivace 108
13 Vyuzitı derivace
13.1 Stacionarnı body a vztah k lokalnım maximum a minimum
Definice 13.1 Bod x0 je stacionarnım bodem funkce f pokud f ′(x0) = 0.
Veta 13.1 (Nutna podmınka lokalnıho extremu) Necht’ bod x0 je bodem lokalnıho extremu(minimum nebo maximum) funkce f a necht’ existuje f ′(x0), pak f ′(x0) = 0.
POZNAMKY:
• Funkce f ma lokalnı extrem pouze ve stacionarnıch bodech (f ′(x) = 0) nebo v bodech, kde prvnıderivace neexistuje.
• Existujı stacionarnı body, ve kterych nema funkce extrem. Prıklad f(x) = x3, stacionarnı bodje bod 0 (f ′(x0) = 3x2
0 = 0⇒ x0 = 0), ale funkce nema v tomto bode lokalnı extrem.
• Existujı body, ve kterych neexistuje derivace funkce a funkce ma v tomto bode extrem. Prıkladf(x) = |x−1|ma lokalnı minimum v bode x0 = 1 a nema v tomto bode derivaci, resp f ′−(1) = −1a f ′+(1) = 1.
Veta 13.2 Postacujıcı podmınka lokalnıho extremu Necht’ funkce f je diferencovatelna naprstencovem okolı bodu x0 a spojite v bode x0. Necht’ pro kazde x z intervalu (x0 − δ;x0) je f ′(x) > 0a pro kazde x y intervalu (x0;x0 + δ) je f ′(x) < 0, pak ma funkce f v bode x0 lokalnı maximum.
Veta 13.3 O stacionarnıch bodech
• Jestlize f ′(x0) = 0 a f ′′(x0) > 0, pak ma funkce v bode x0 ostre lokalnı minimum.
• Jestlize f ′(x0) = 0 a f ′′(x0) < 0, pak ma funkce v bode x0 ostre lokalnı maximum.
• Jestlize f ′(x0) = f ′′(x0) = 0 a f ′′′(x0) > 0, pak ma funkce v bode x0 inflexnı bod (graf prechazı zpolohy pod tecnou na polohu nad tecnou).
• Jestlize f ′(x0) = f ′′(x0) = 0 a f ′′′(x0) < 0, pak ma funkce v bode x0 inflexnı bod (graf prechazı zpolohy nad tecnou na polohu pod tecnou).
Obecne necht’ platı
f ′(x0) = f ′′(x0) = · · · = fm−1(x0) = 0 a fm(x0) 6= 0
• Je-li m liche a fm(x0) > 0, pak je funkce v bode x0 rostoucı, bod x0 je inflexnı bod: prechod zkokavnıho na konvexnı.
• Je-li m liche a fm(x0) < 0, pak je funkce v bode x0 klesajıcı, bod x0 je inflexnı bod: prechod zkovexnıho na konkavnı.
• Je-li m sude a fm(x0) > 0, pak ma funkce v bode x0 minimum.
108 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 13 Vyuzitı derivace 109
• Je-li m sude a fm(x0) < 0, pak ma funkce v bode x0 maximum.
Ukazku prubehu funkce
• funkce je spojita v Df = (−∞; +∞)
• funkce ma derivaci v Df − {x4}
• prvnı derivace funkce je rovna nule (f ′(x) = 0) v bodech x1, x2 a x3
• funkce ma lokalnı extrem v bodech x1, x2, x3 a x4
• funkce je rostoucı v intervalu (−∞;x1) ∪ (x2;x3) ∪ (x4,+∞)
• funkce je klesajıcı v intervalu (x1;x2) ∪ (x3;x4)
• druha derivace funkce je rovna nule (f ′′(x) = 0) v bodech x5 a x6, toto jsou inflexnı body funkce
109 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 13 Vyuzitı derivace 110
13.2 Vety o strednı hodnote - nabyvanı hodnot na uzavrenem intervalu
Veta 13.4 Rollova veta Jestlize funkce y = f(x) je spojita na uzavrenem intervalu 〈a; b〉 a ma vkazdem bode otevreneho intervalu (a; b) vlastnı nebo nevlastnı prvnı derivaci a platı f(a) = f(b), pakexistuje alespon jeden bod c ∈ (a; b) takovy, ze platı
f ′(c) = 0.
Veta 13.5 Lagrangeova veta Jestlize funkce y = f(x) je spojita na uzavrenem intervalu 〈a; b〉 ama v kazdem bode otevreneho intervalu (a; b) vlastnı nebo nevlastnı prvnı derivaci, pak existuje alesponjeden bod c ∈ (a; b) takovy, ze platı
f ′(c) =f(b)− f(a)
b− a.
POZNAMKA:
Geometricka interpretace uvedenych vet.
110 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 13 Vyuzitı derivace 111
13.3 Vyuzitı derivacı pro vypocet limit - l´Hospitalovo pravidlo
(o funkci f nemusım nic predpokladat) a jestlize existuje limx→a
f ′(x)/g′(x), pak existuje limx→a
f(x)/g(x)
a platı
limx→a
f ′(x)
g′(x)= lim
x→a
f(x)
g(x)
Toto pravidlo vyuzıvame pri urcovanı limit typu∞∞
nebo0
0.
Jestlize hledam limitu funkce f(x) · g(x), ktera je typu 0 · ∞ prevedu problem na hledanı limity typu∞∞
podle pravidla
limx→a
f(x) · g(x) = limx→a
g(x)1
f(x)
Jestlize hledam limitu funkce f(x) − g(x), ktera je typu ∞−∞ prevedu problem na hledanı limity
typu0
0podle pravidla
limx→a
(f(x)− g(x)) = limx→a
1g(x)− 1
f(x)
1f(x)· 1g(x)
Jestlize hledam limitu funkce f(x)g(x), ktera je typu 00 nebo∞0 nebo 1∞ prevedu problem na hledanılimity typu e0·∞ podle pravidla
limx→a
f(x)g(x) = limx→a
eg(x)·ln[f(x)]
111 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 13 Vyuzitı derivace 112
13.4 Vyuzitı derivacı pro urcovanı rovnice tecen a rovnice normaly
Veta 13.7 Tecny a normaly Necht’ funkce f ∈ C(〈a; b〉) a necht’ x0 ∈ (a; b), pak pro rovnici tecnyτ funkce f v bode x0 platı
τ : y = f(x0) + f ′(x0)(x− x0)
a pro rovnici normaly η funkce f v bode x0 platı
η : y = f(x0)− 1
f ′(x0)(x− x0)
112 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 13 Vyuzitı derivace 113
13.5 Vyuzitı derivacı pro aproximaci funkce polynomem - Tayloruv poly-nom
Veta 13.8 Tayloruv rozvoj funkce v bode Necht’ funkce f(x) ma na intervalu 〈a, x〉 (x > a)spojite derivace az do n-teho radu a na intervalu (a, x) ma spojitou derivaci n+ 1-nıho radu, pak lzefunkci rozvest v mocninou radu Taylorova typu:
f(x) = f(a) +f ′(a)
1!(x− a) +
f ′′(a)
2!(x− a)2 + . . .+
f (n)(a)
n!(x− a)n +Rn+1
kde zbytek Rn+1 lze vyjadrit naprıklad ve tvaru
Rn+1 =f (n+1)(a+ ϑ(x− a))
(n+ 1)!(x− a)n+1, ϑ ∈ (0, 1)
Specialne pro x = a+ h platı
f(a+ h) = f(a) +f ′(a)
1!h+
f ′′(a)
2!h2 + . . .+
f (n)(a)
n!hn +Rn+1.
Specialne pro a = 0 dostaneme Maclaurinuv vzorec
f(x) = f(0) +f ′(0)
1!(x) +
f ′′(0)
2!(x)2 + . . .+
f (n)(0)
n!(x)n +Rn+1
Prıklady Taylorovych rad
• ex = 1 +x
1!+x2
2!+ . . ., pro |x| < +∞
• ax = 1 +x ln a
1!+
(x ln a)2
2!+ . . ., pro |x| <∞, a > 0
• lnx =x− 1
1!− (x− 1)2
2!+
(x− 1)3
3!− . . ., pro 0 < x ≤ 2
• ln (1 + x) = x− x2
2!+x3
3!− . . ., pro −1 < x ≤ 1
• sinx = x− x3
3!+x5
5!− . . ., pro |x| < +∞
• cosx = 1− x2
2!+x4
4!− . . ., pro |x| < +∞
• arcsinx = x+1
2
x3
3+
1
2
3
4
x5
5+ . . ., pro |x| < 1
• arccosx =π
2− x− 1
2
x3
3− 1
2
3
4
x5
5− . . ., pro |x| < 1
• arctgx = x− x3
3+x5
5− . . ., pro |x| ≤ 1
• arccotgx =π
2− x+
x3
3− x5
5+ . . ., pro |x| ≤ 1
113 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 13 Vyuzitı derivace 114
Prıklad: Tayloruv rozvoj funkce f(x) = sin(x) v bode x0 = 0
• f(x) = sin(x)
• T1(x) = x
• T3(x) = x− 1
3!x3
• T5(x) = x− 1
3!x3 +
1
5!x5
114 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 14 Vysetrovanı prubehu funkce 115
14 Vysetrovanı prubehu funkce
14.1 Zakladnı pojmy dulezite pro prubeh realne funkce f
Rostoucı funkce , pokud pro x1 < x2 platı f(x1) ≤ f(x2)
Ostre rostoucı funkce , pokud pro x1 < x2 platı f(x1) < f(x2)
Klesajıcı funkce , pokud pro x1 < x2 platı f(x1) ≥ f(x2)
Ostre klesajıcı funkce , pokud pro x1 < x2 platı f(x1) > f(x2)
Konvexnı (ostre konvexnı) funkce , pokud pro x1 < x < x2 platı f(x) < Y , kde bod [x, Y ] jebod, ktery lezı na usecce spojujıcı body [x1, f(x1)] a [x2, f(x2)].
Tj. platı Y = f(x1) +f(x2)− f(x1)
x2 − x1
(x− x1)
Konkavnı (ostre konkavnı) funkce , pokud pro x1 < x < x2 platı f(x) > Y , kde bod [x, Y ] jebod, ktery lezı na usecce spojujıcı body [x1, f(x1)] a [x2, f(x2)].
Tj. platı Y = f(x1) +f(x2)− f(x1)
x2 − x1
(x− x1)
A - lokalnı maximum A = [xA; yA = f(xA)] ∈ R2 - bod, ve kterem je funkcnı hodnoty maximalnı.Funkce nabyva maximum v bode xA a hodnota maxima (funkcnı hodnota v bode maxima) jeyA = f(xA)Bod xA je bodem lokalnıho maxima funkce f .
B - lokalnı minimum B = [xB; yB = f(xB)] ∈ R2 - bod, ve kterem je funkcnı hodnoty minimalnı.Funkce nabyva minima v bode xB a hodnota minima (funkcnı hodnota v bode minima) jeyB = f(xB)Bod xB je bodem lokalnıho minima funkce f .
C - inflexnı bod C = [xC ; yC = f(xC)] ∈ R2 - bod, kdy dochazı ke zmene chovanı funkce z konvexnıfunkce se stane funkce konkavnı (nebo naopak).Bod xC je inflexnım bodem funkce f .
D - nulovy bod D = [xD; 0] ∈ R2 - bod, kdy graf funkce protına osu x.Bod xD je nulovym bodem funkce f , pokud f(xD) = 0.
E - pol E = [xE;±∞] ∈ R2 - bod, kdy graf funkce diverguje do ±∞.Bod xE je polem funkce f , pokud lim
x→xEf(x) =∞ nebo lim
x→xEf(x) = −∞.
115 10. zarı 2010
KMA/ZM1 (Blanka Sediva): 14 Vysetrovanı prubehu funkce 116
14.2 Postup pri vysetrovanı prubehu funkce
1. Najdu definicnı obor funkce, prıpadne obor hodnot.
2. Rozhodnu, zda funkce nenı suda, licha nebo periodicka. V takovemto prıpade se omezıme pouzena cast definicnıho oboru.
3. Urcım limity v krajnıch bodech definicnıho oboru (ve vlastnıch bodech urcuji limity zleva azprava).
4. Urcım intervaly spojitosti a najdu body nespojitosti funkce a rozhodnu o druhu nespojitosti vdanych bodech.
5. Urcım body, ve kterych neexistuje prvnı derivace funkce a stacionarnı body (body, ve kterychje prvnı derivace rovna nule).
6. Najdu lokalnı extremy funkce a urcım intervaly monotonie:
• pokud f ′(x) > 0 pak funkce je rostoucı
• pokud f ′(x) < 0 pak je funkce klesajıcı v danem intervalu
7. Urcım body, ve kterych je druha derivace (a prıpadne dalsı derivace) funkce rovny nula. Najduinflexnı body a urcım intervaly konvexity a konkavnosti.
• pokud f ′′(x) > 0 pak funkce je konkavnı
• pokud f ′′(x) < 0 pak je funkce konvexnı v danem intervalu
8. Urcım rovnice asymptot.
• Pokud v bode x0 je alespon jedna z jednostrannych limit nevlastnı, je prımka x = x0
asymptota funkce f .
• Pokud pro x→∞ existuje prımky y = kx+ q takova, ze platı
limx→∞
f(x)− (kx+ q) = 0 a limx→∞
f(x)
kx+ q= 1
je prımky y = kx+ q asymptota funkce f v dobe ∞.
Asymptota v bode x0 = ∞ existuje prave tehdy, kdyz existujı konecne limity limx→∞
f(x)
x= k a
limx→∞
f(x)− kx = q
9. Najdu funkcnı hodnoty ve vybranych vyznamnych bodech (lokalnı extremy, inflexnı body, prusecıkys osou x a osou y, bode,ve kterych neexistuje derivace)








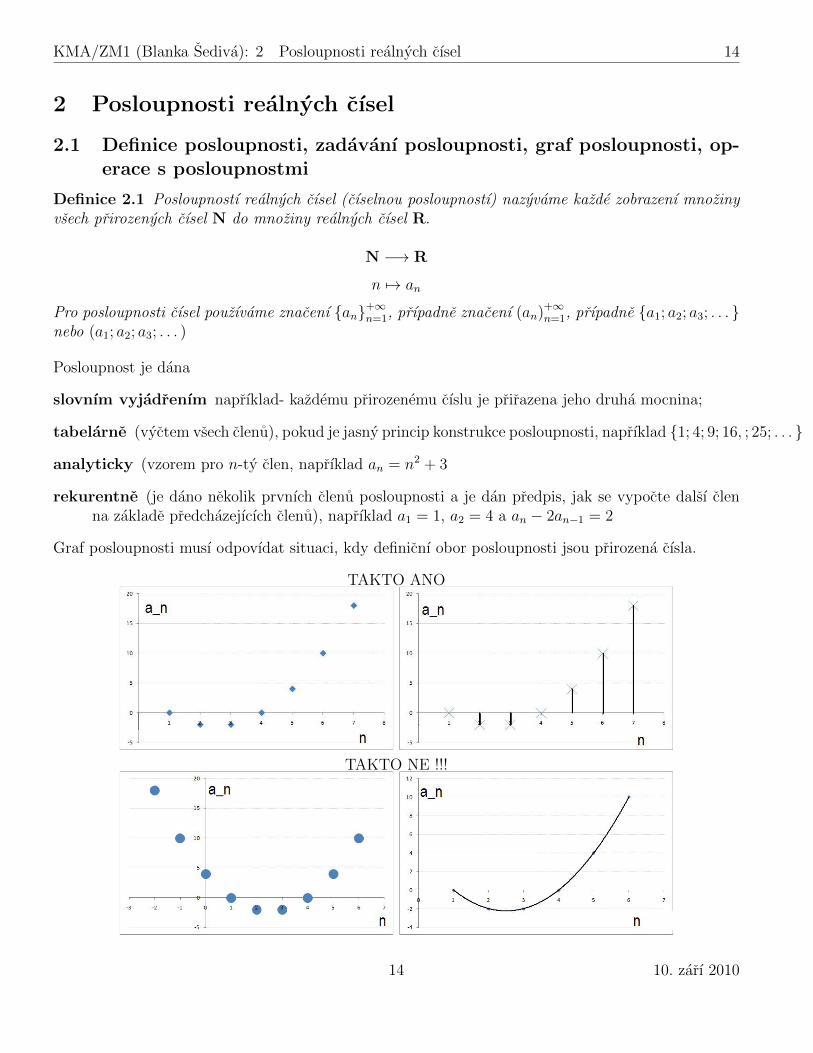
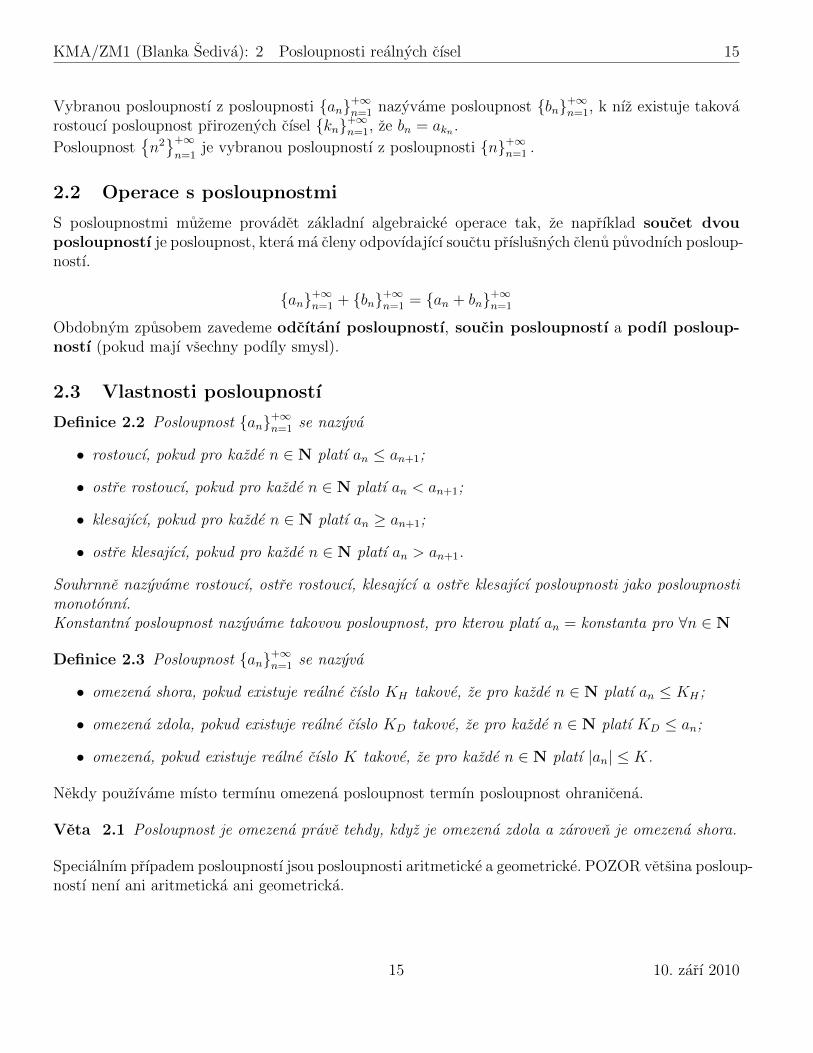

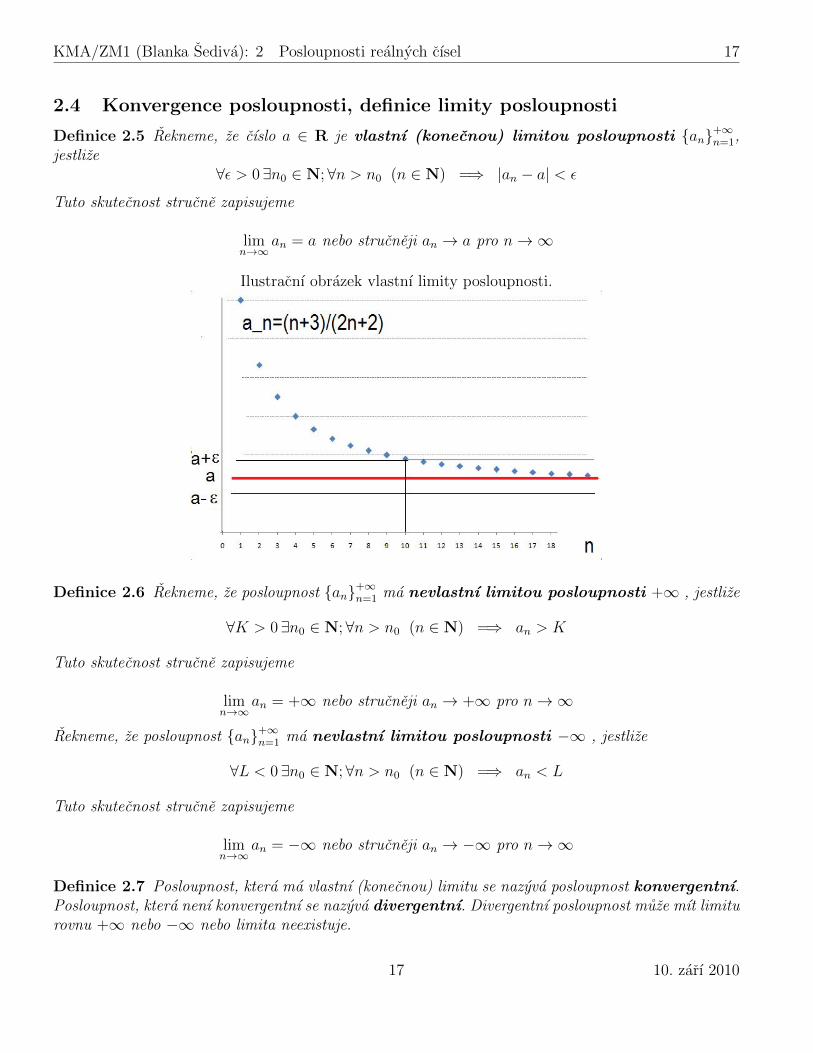










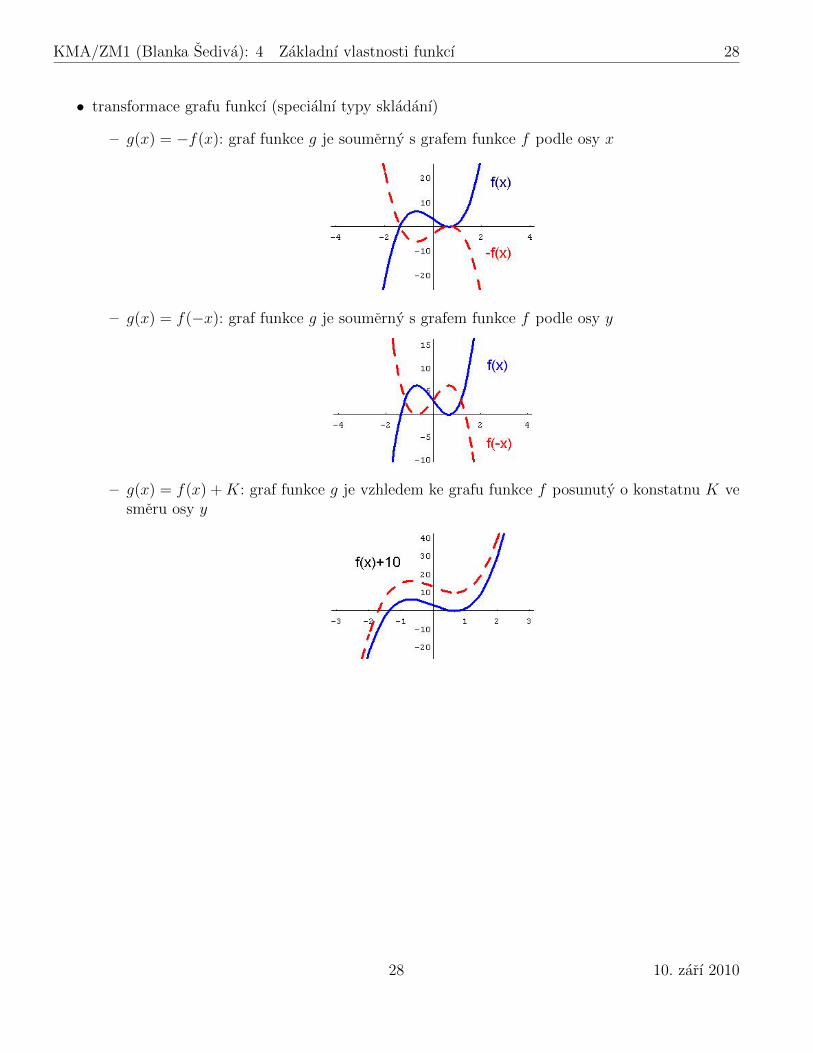
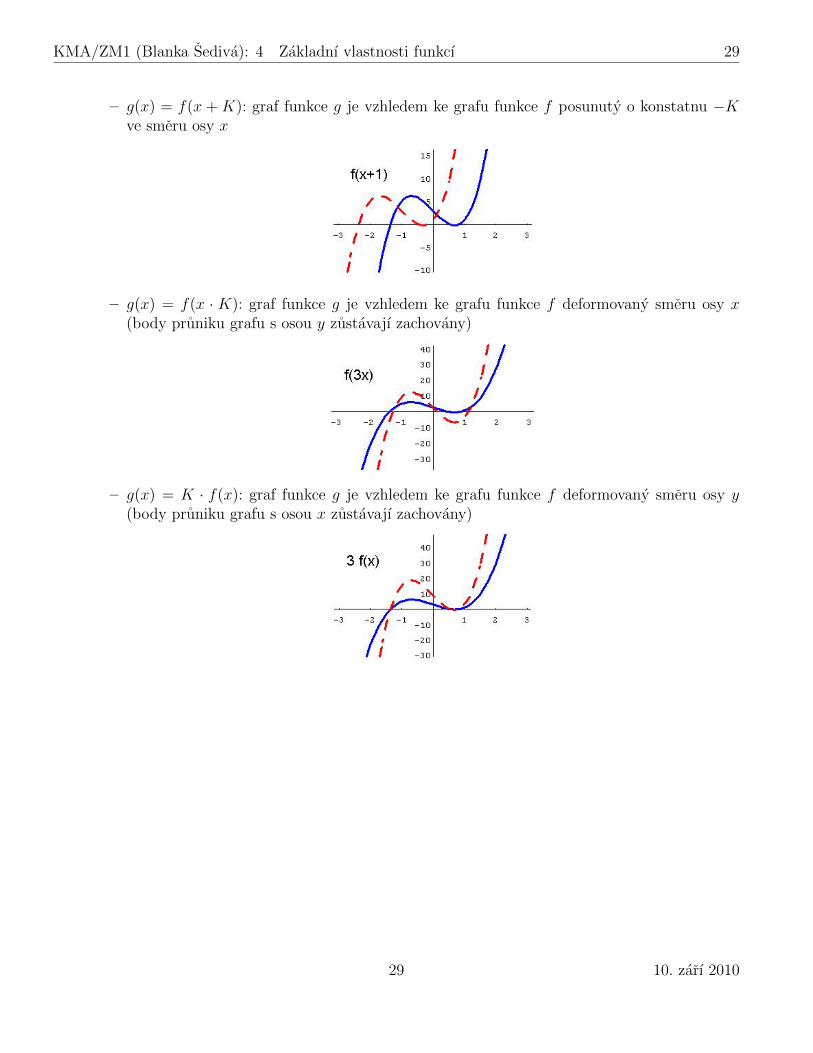
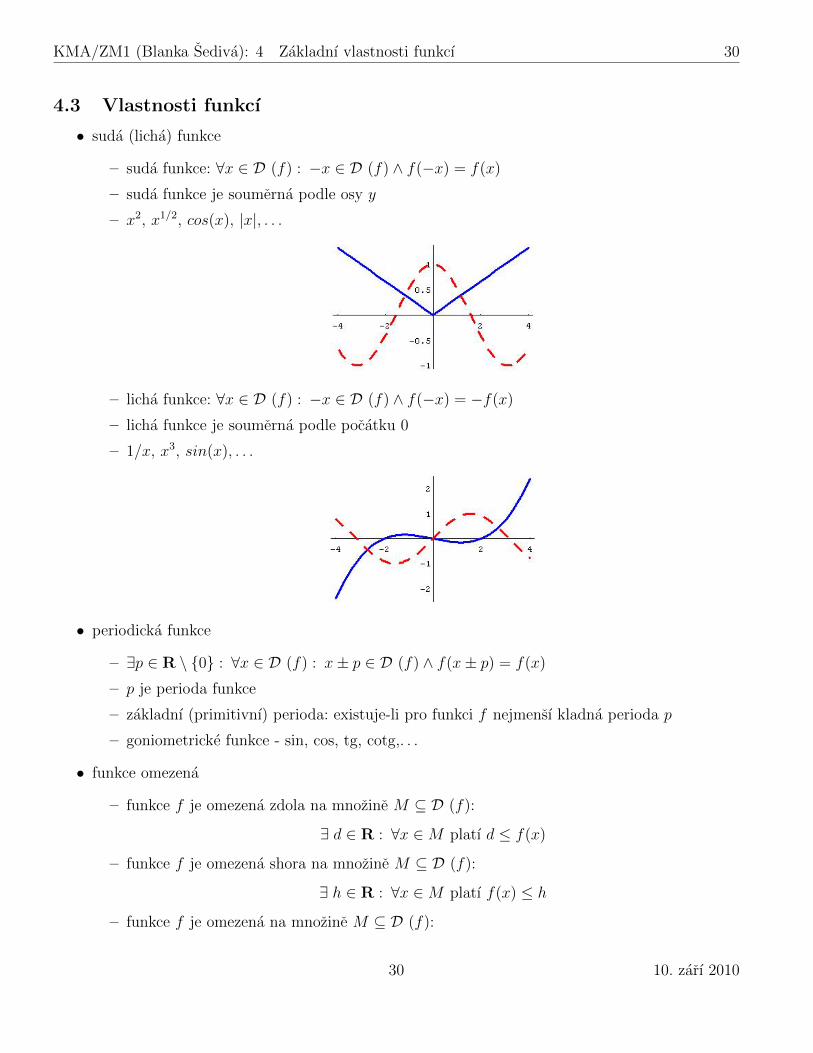


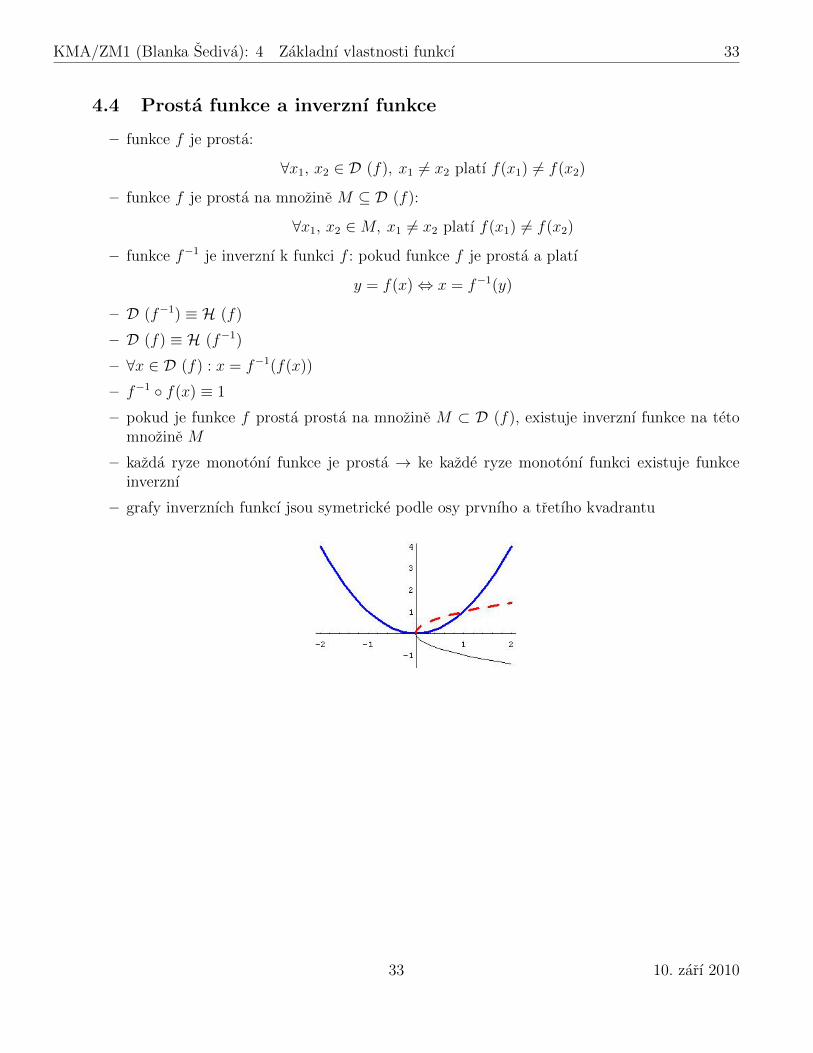


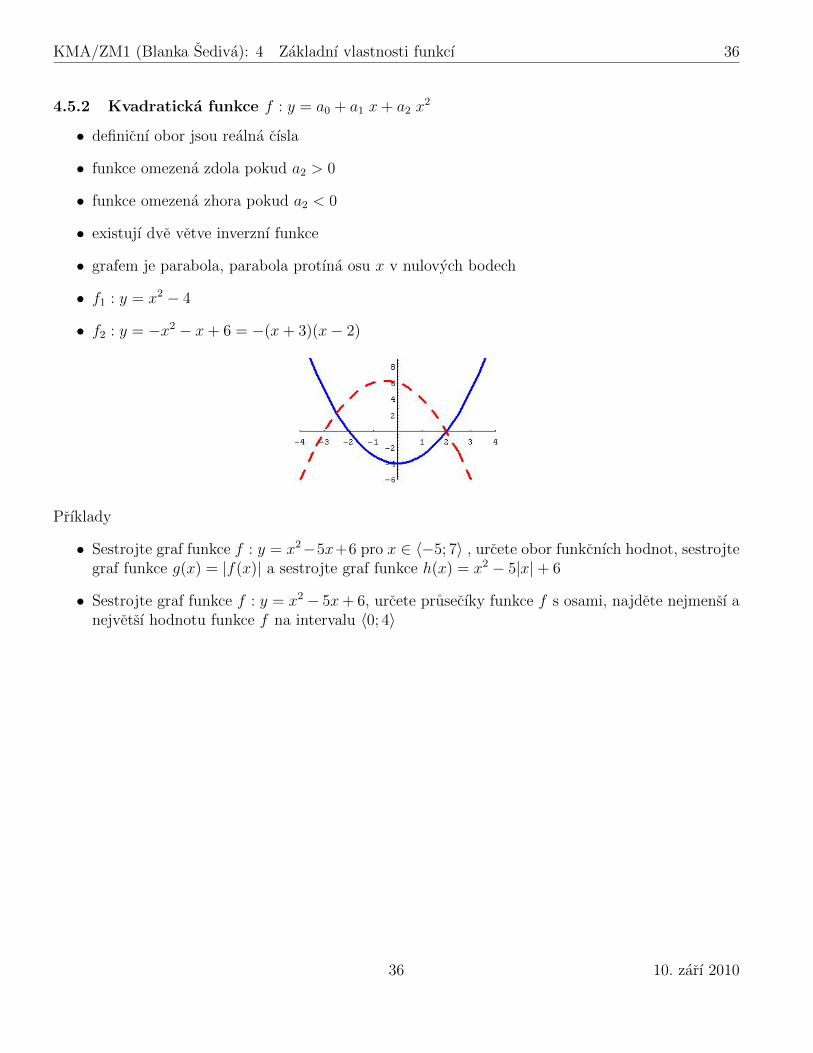

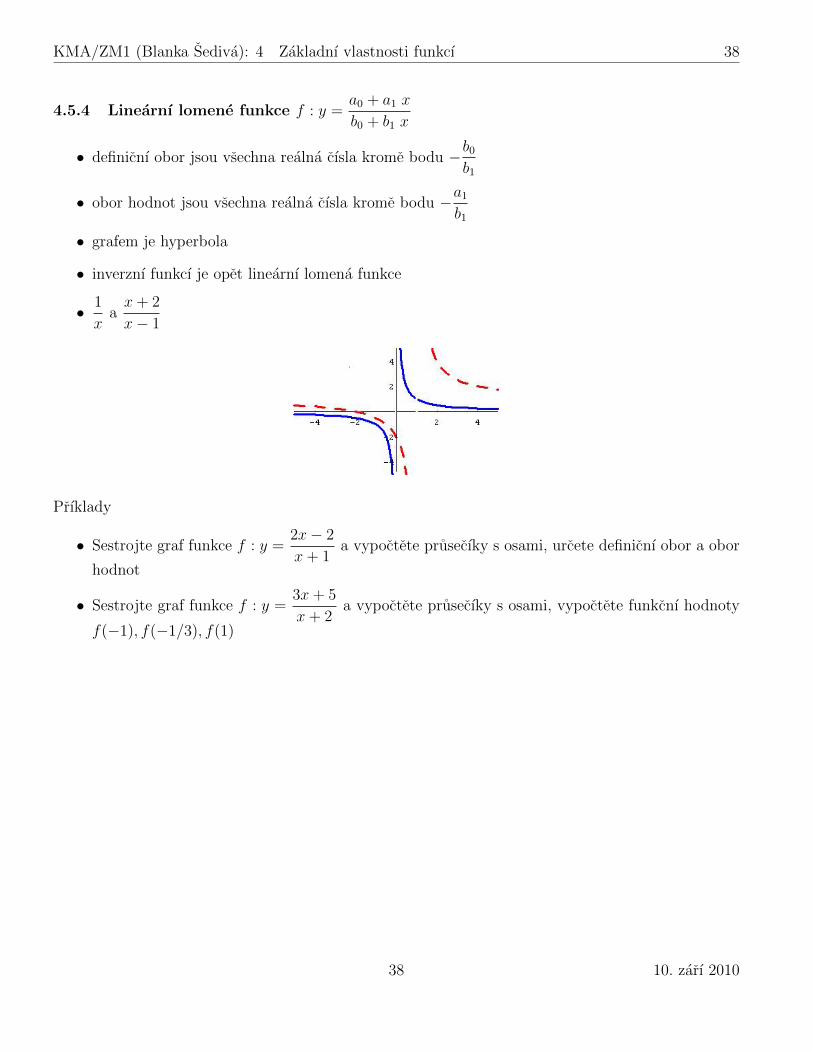

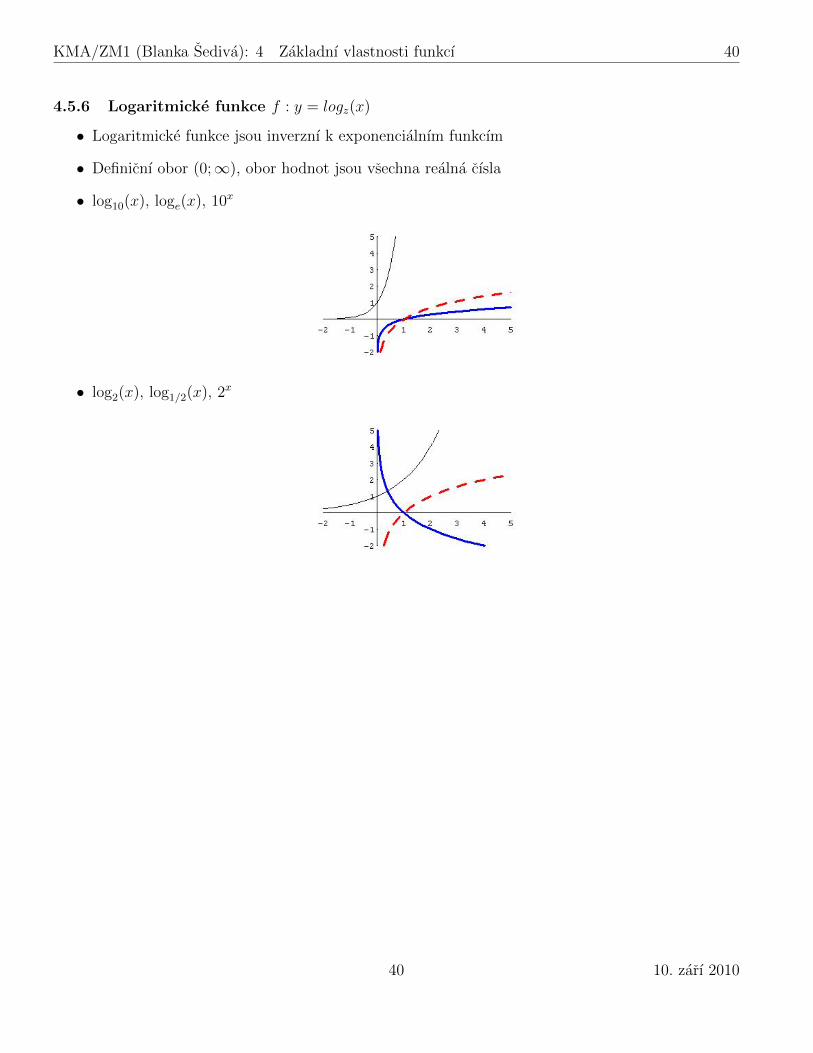
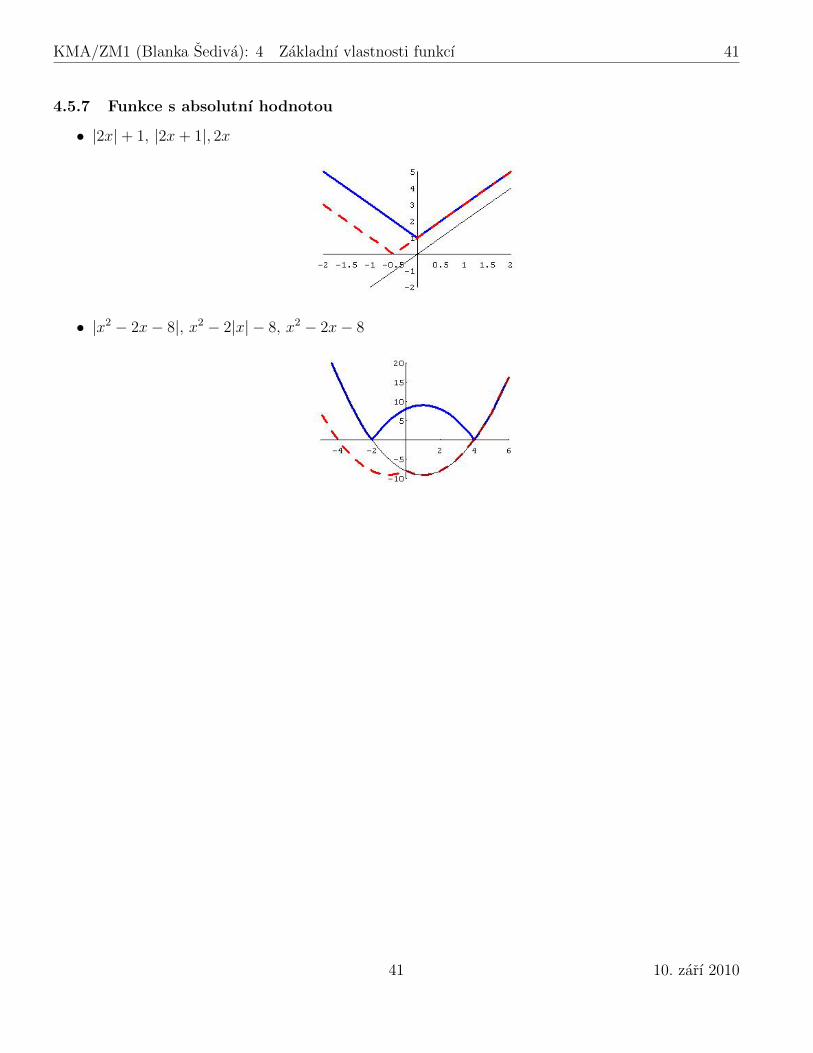







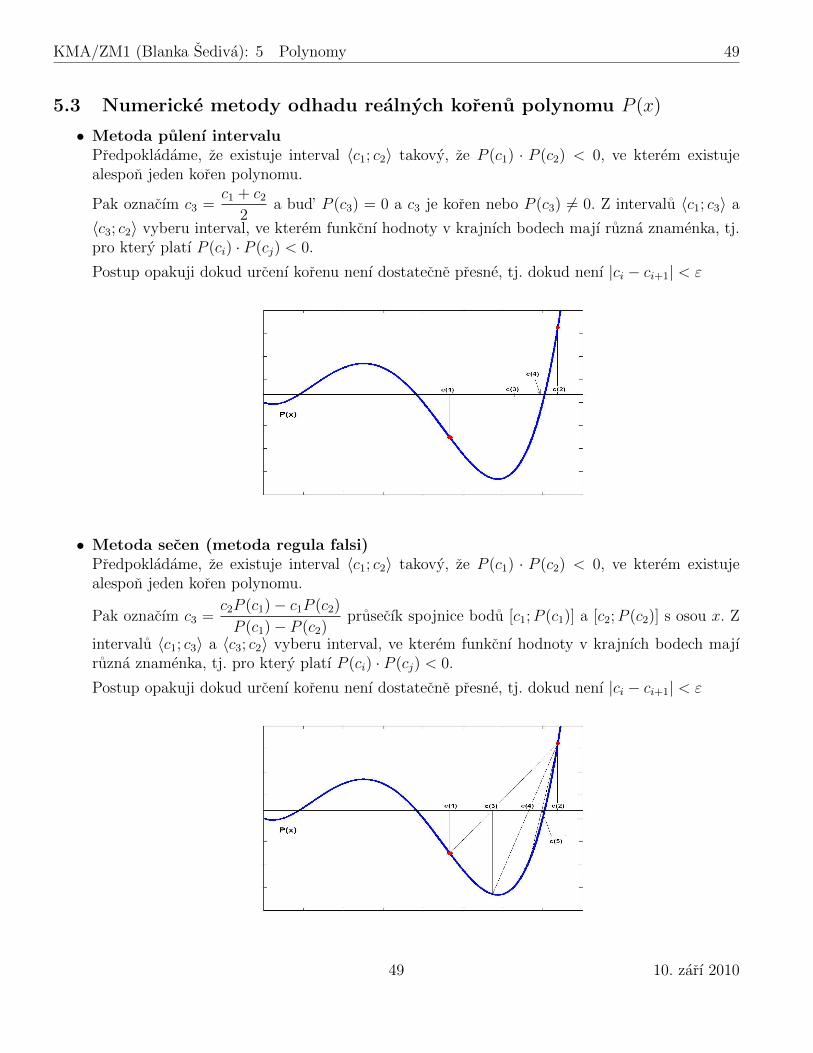
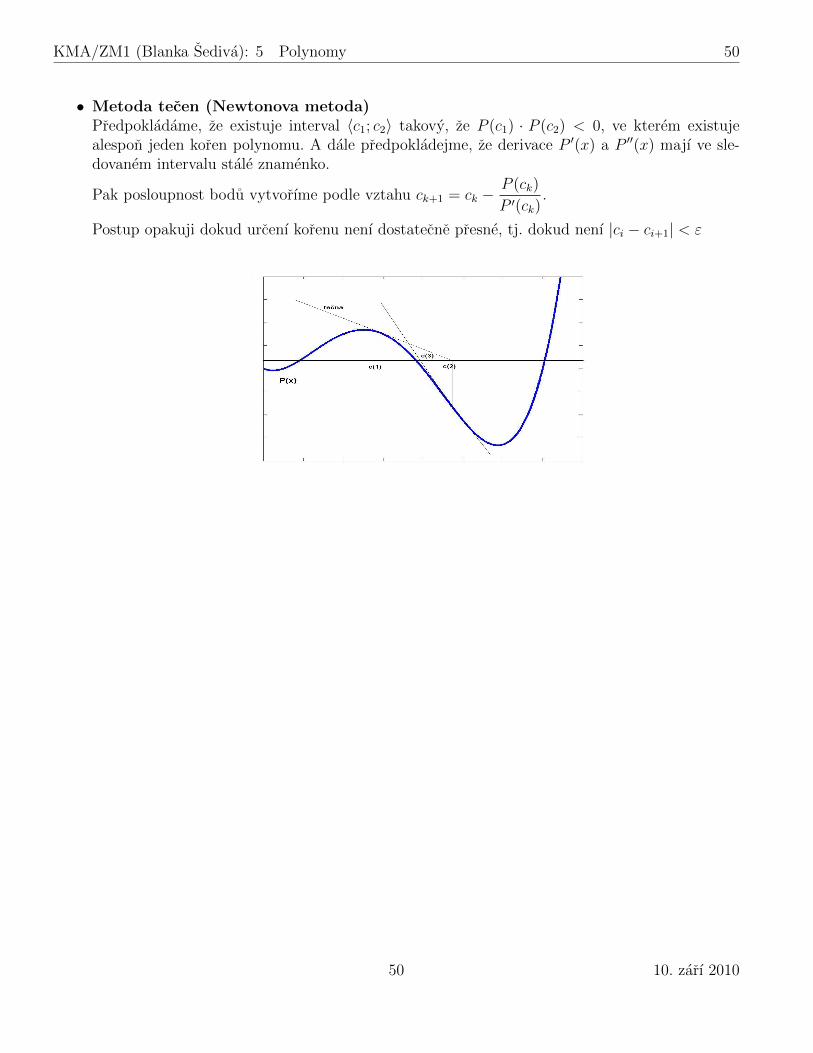



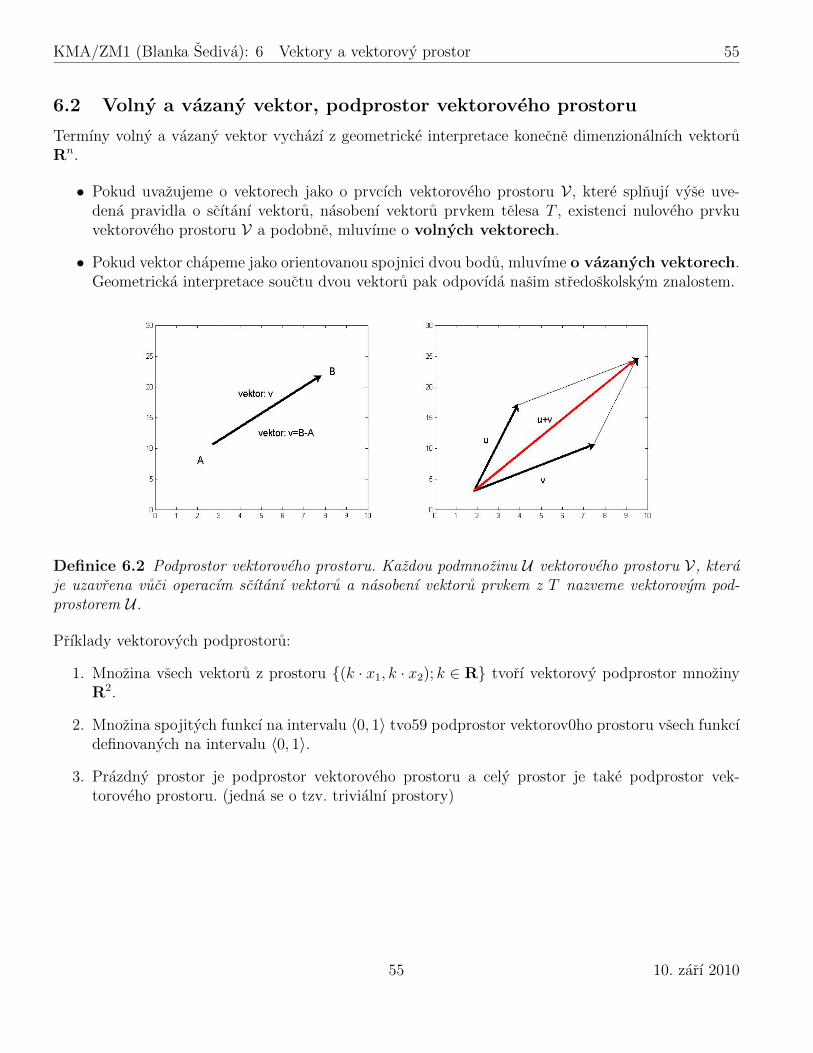

















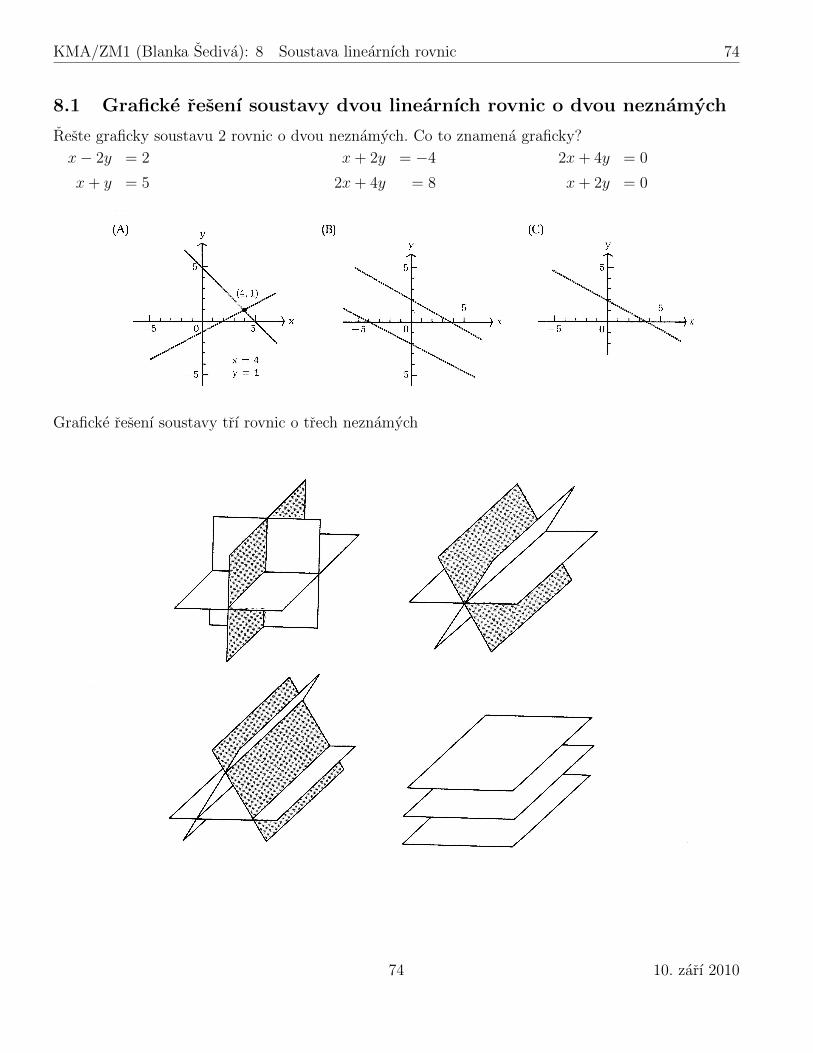





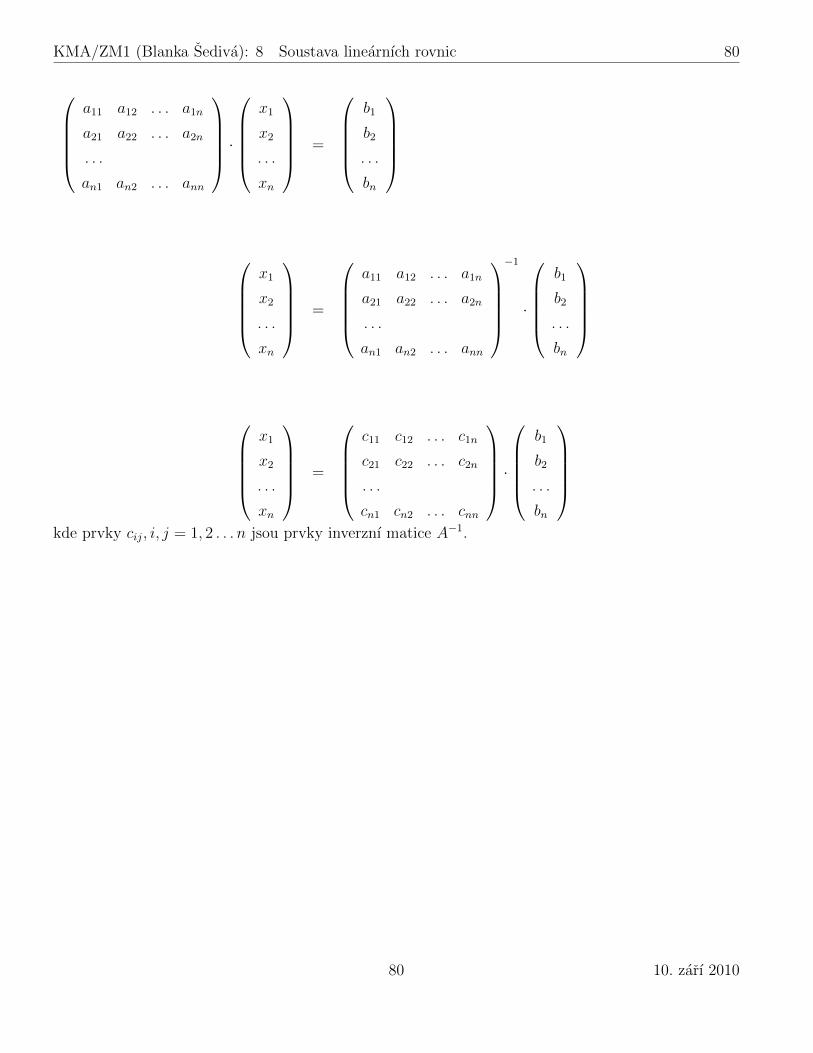


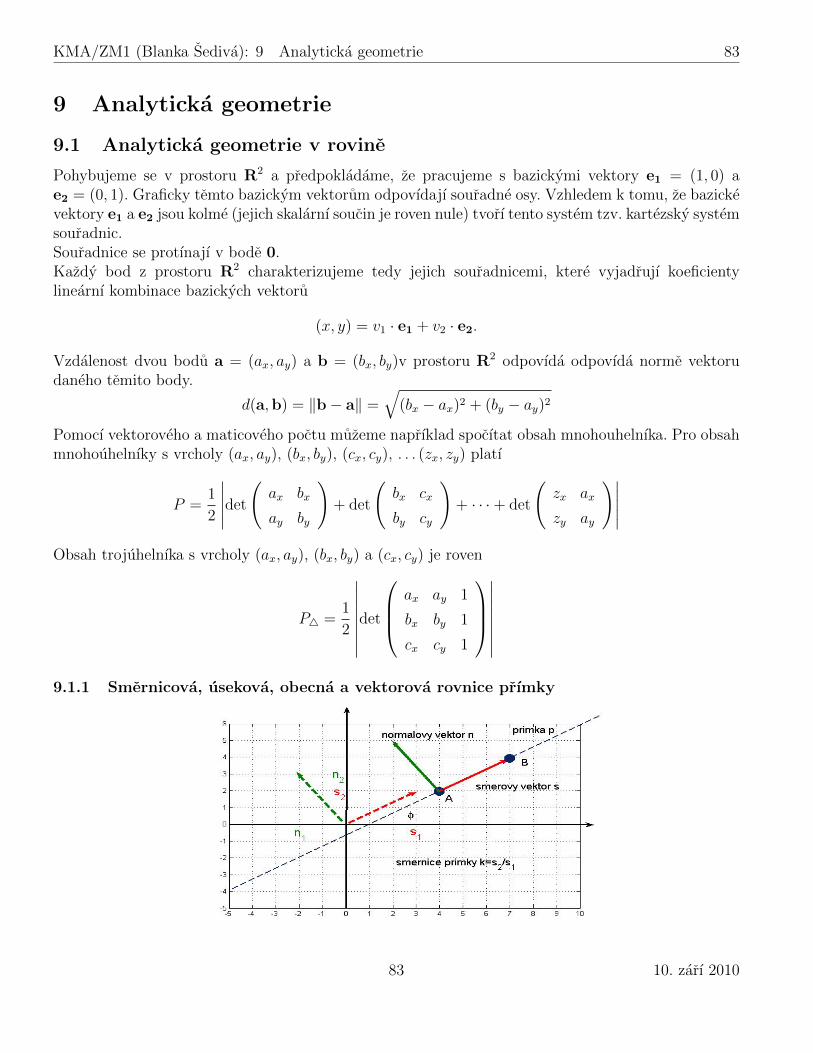



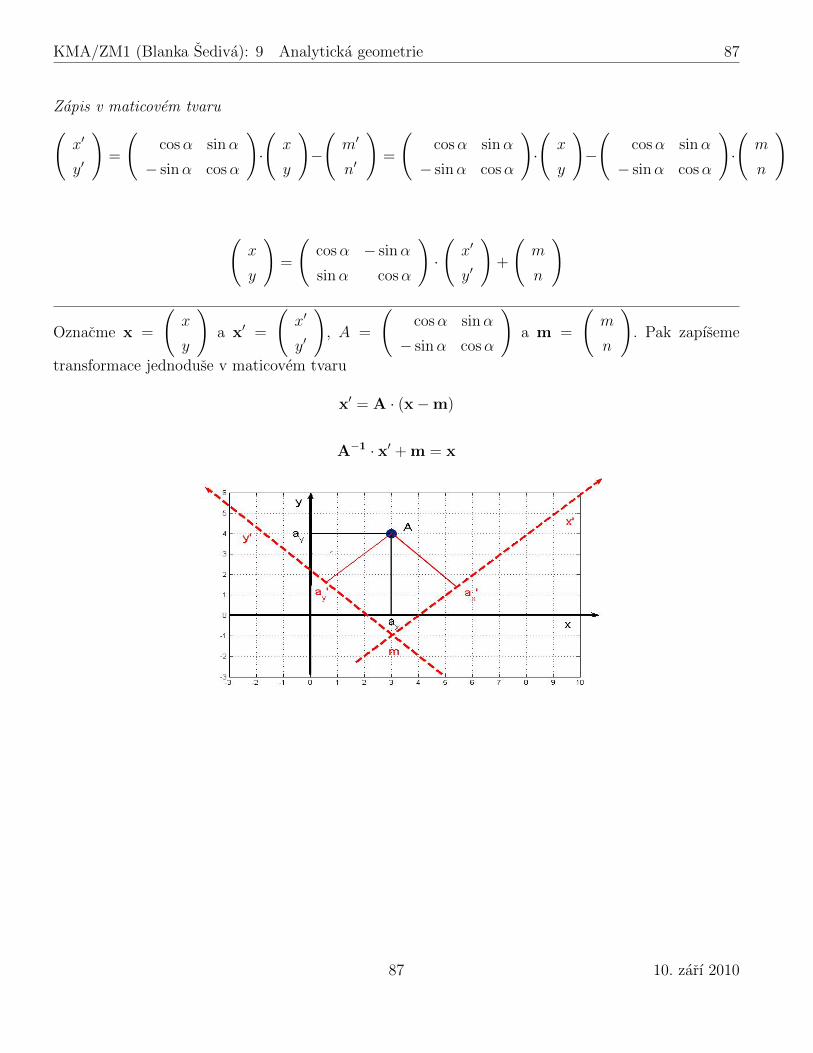



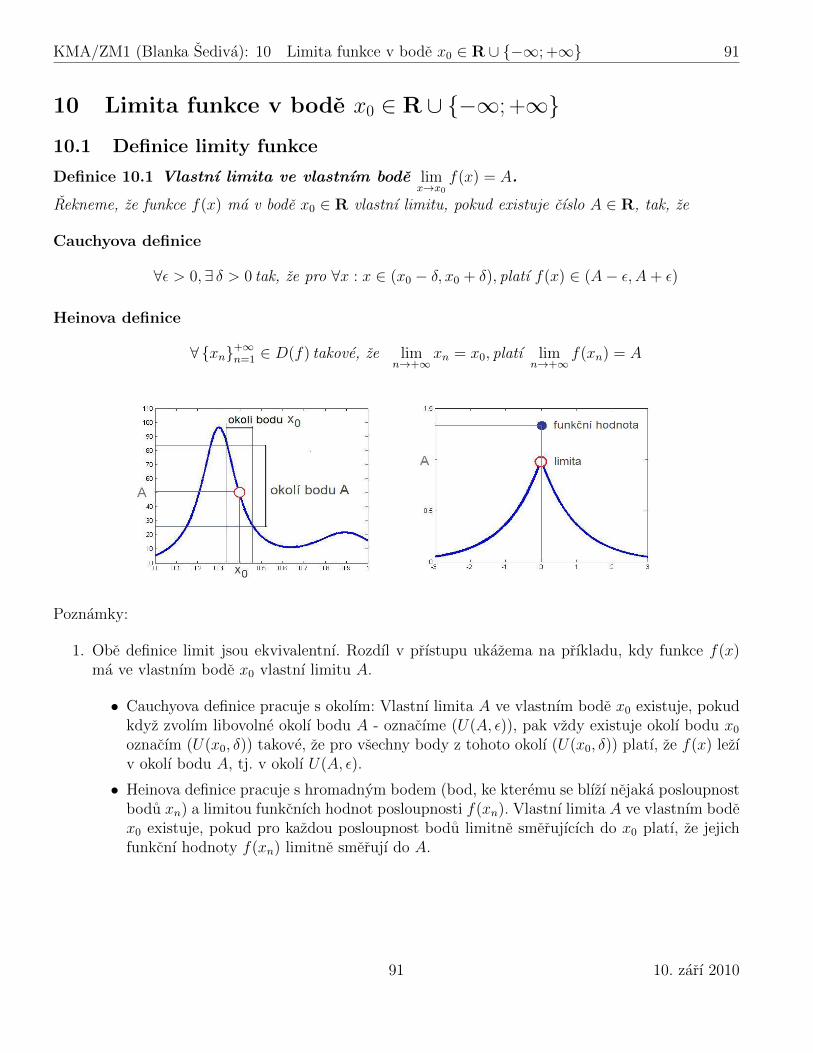
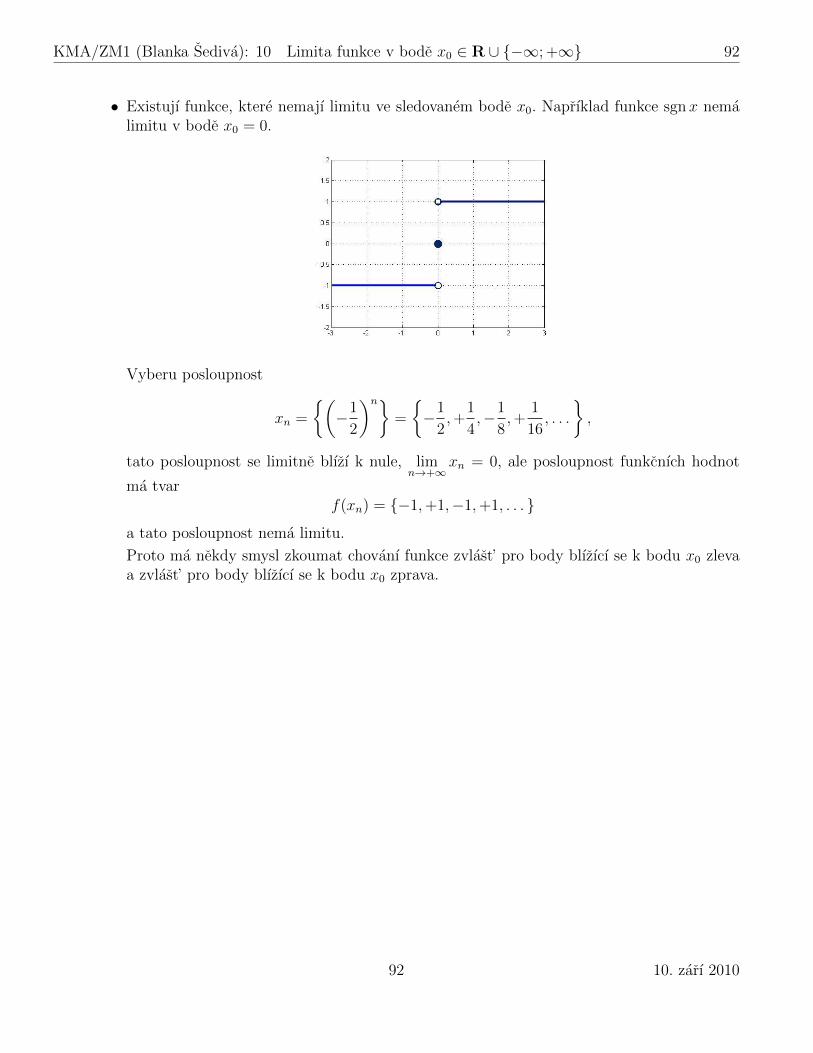
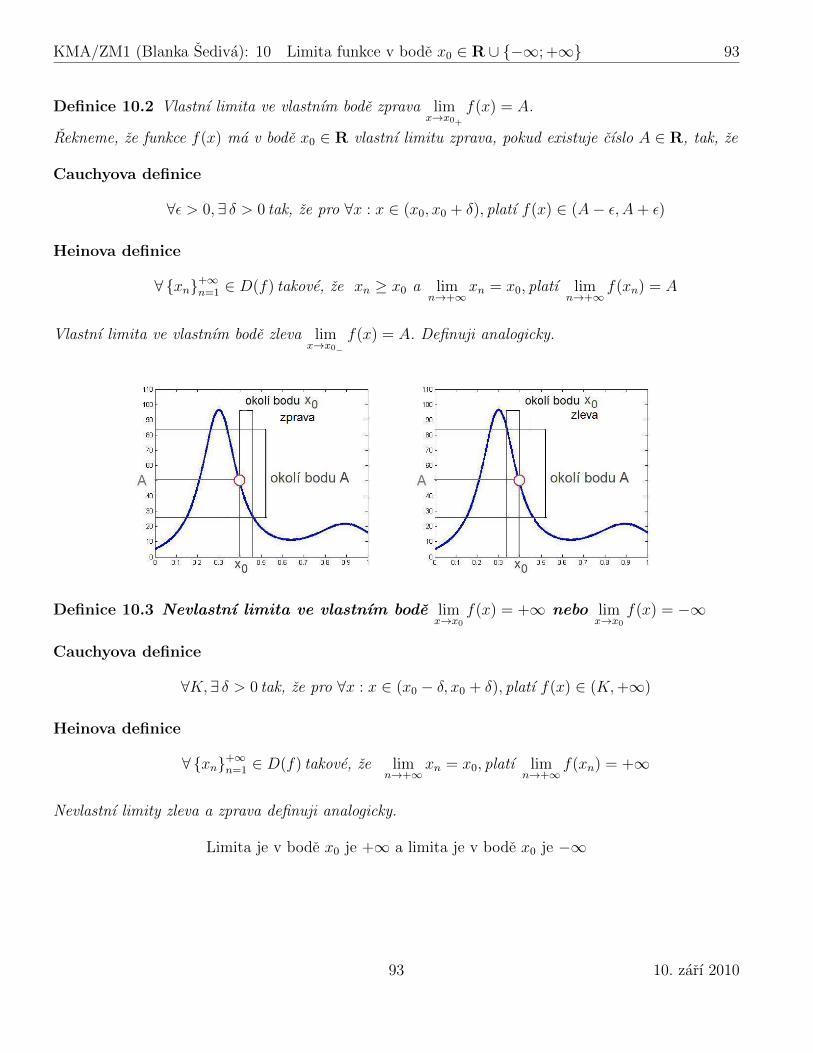
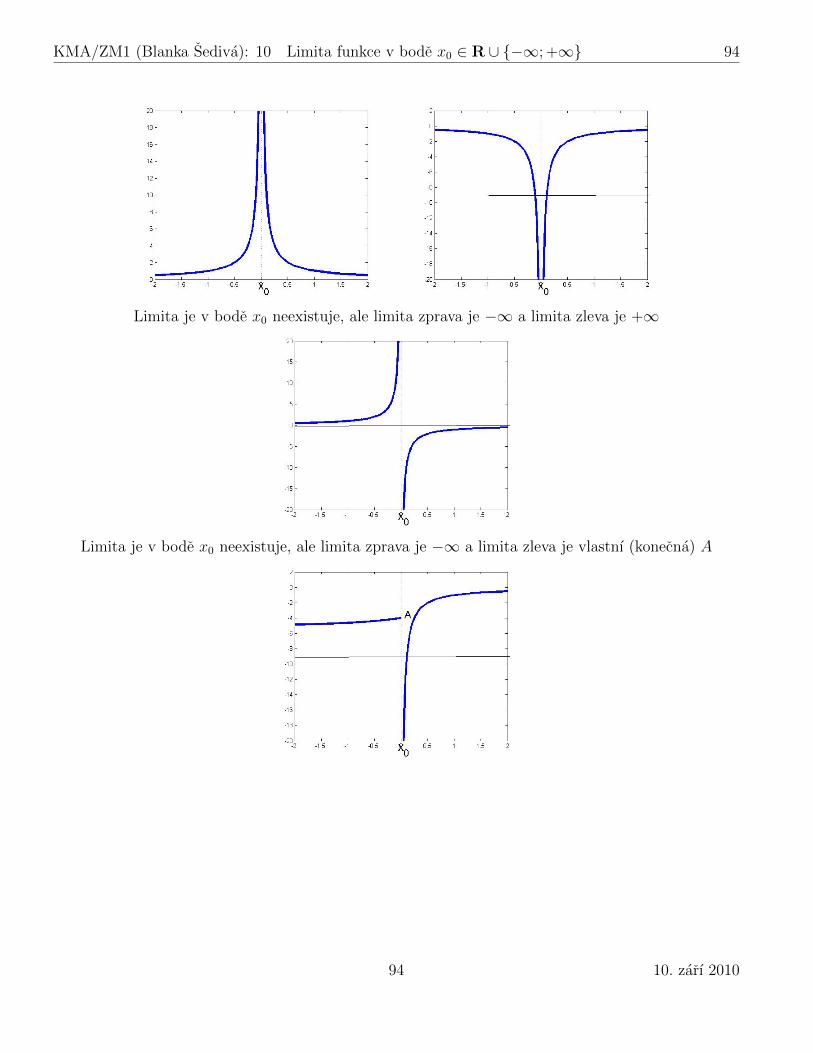
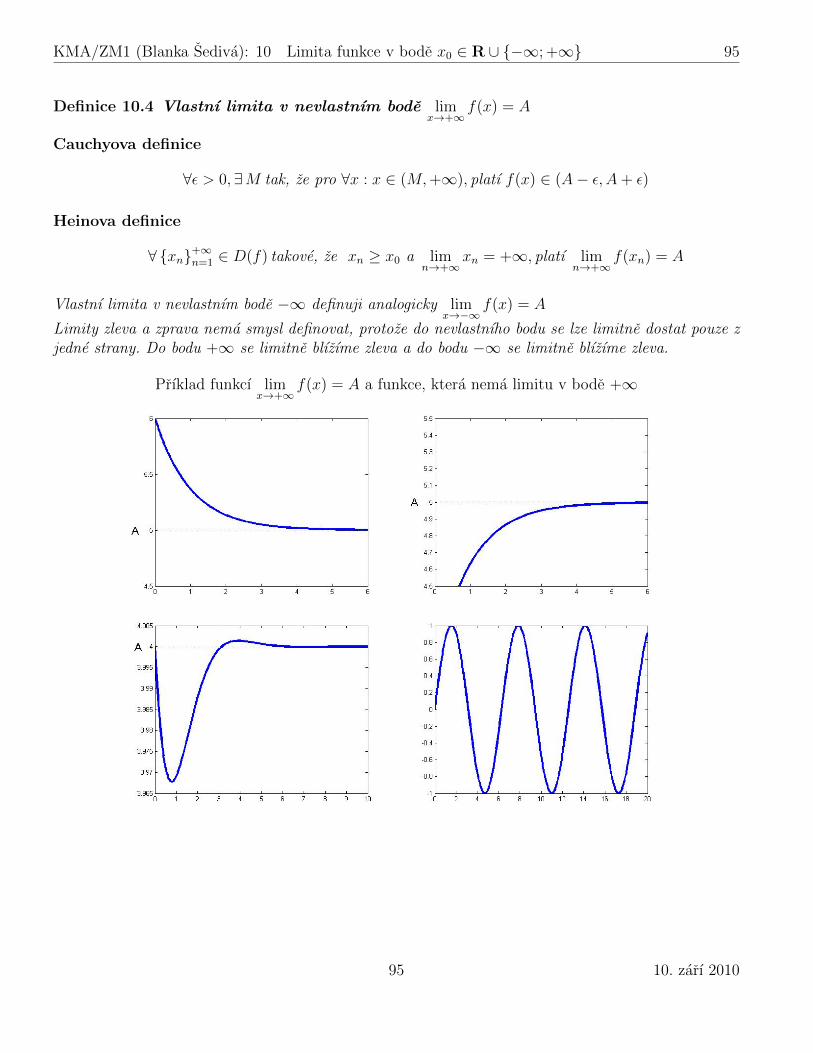
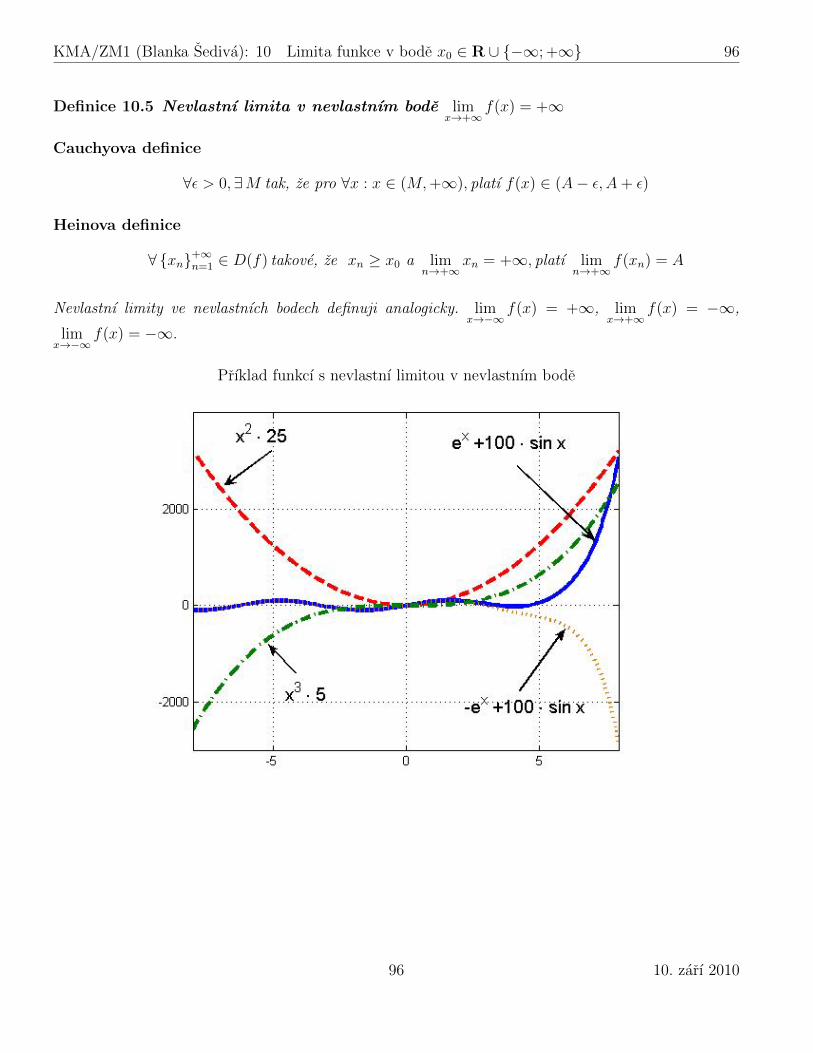




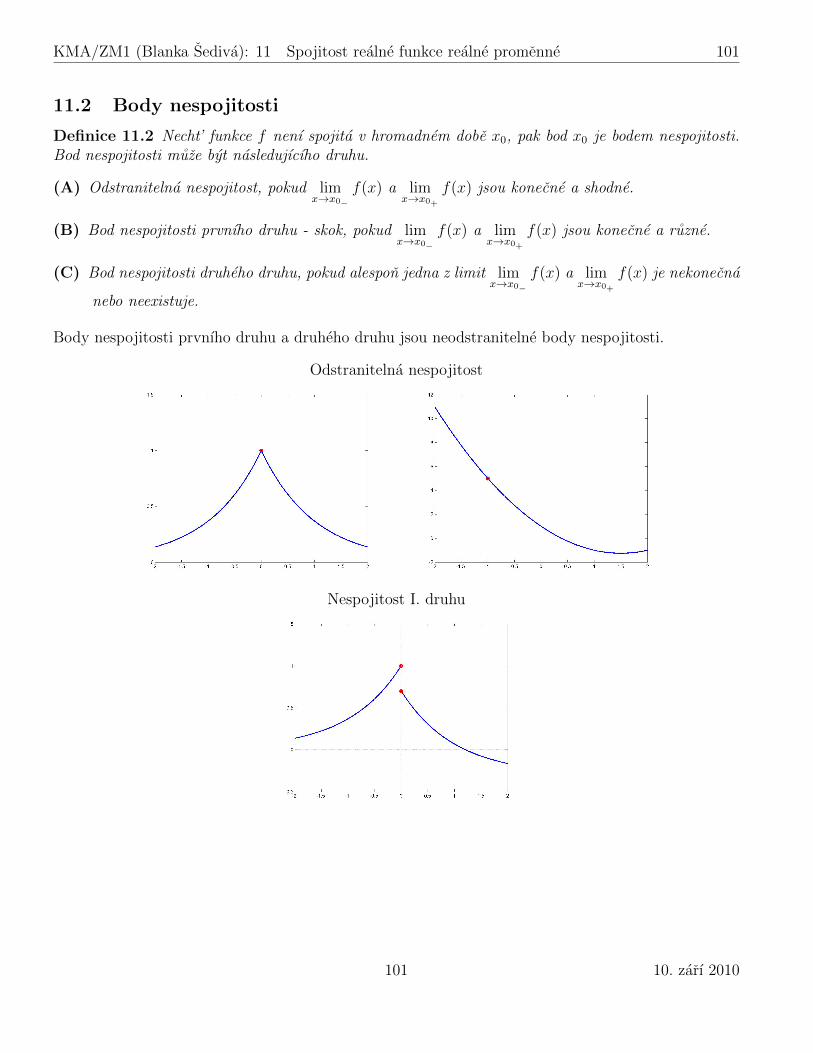

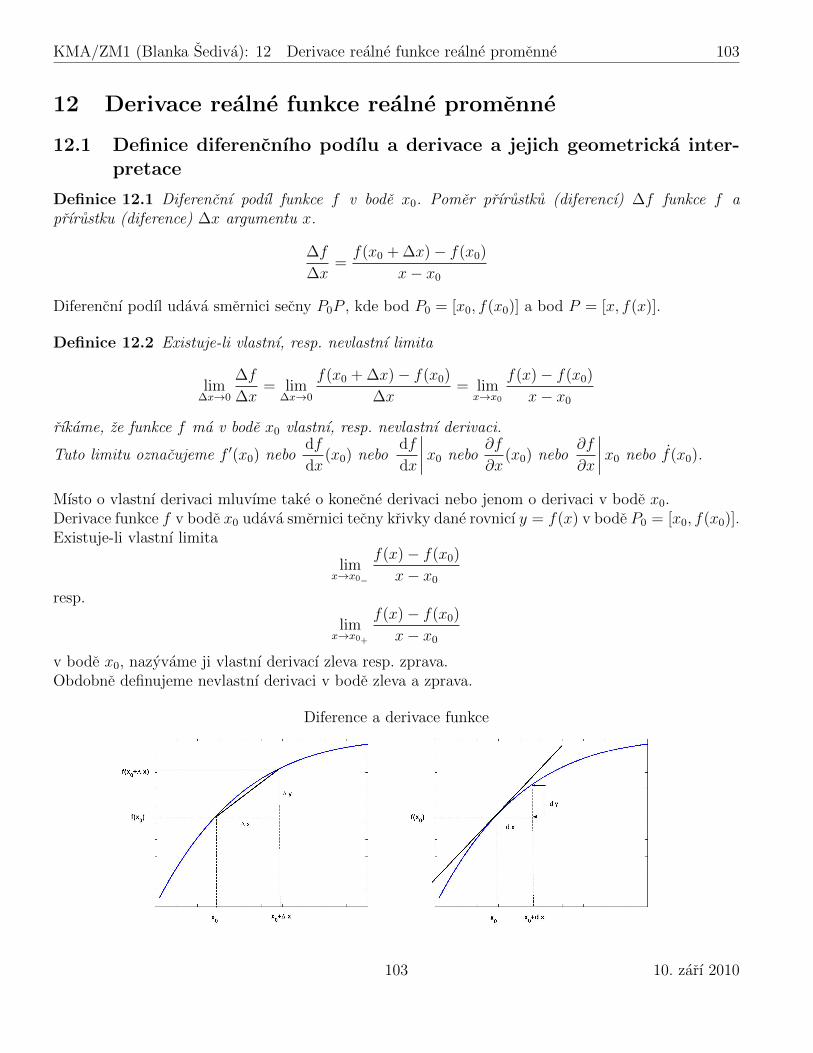
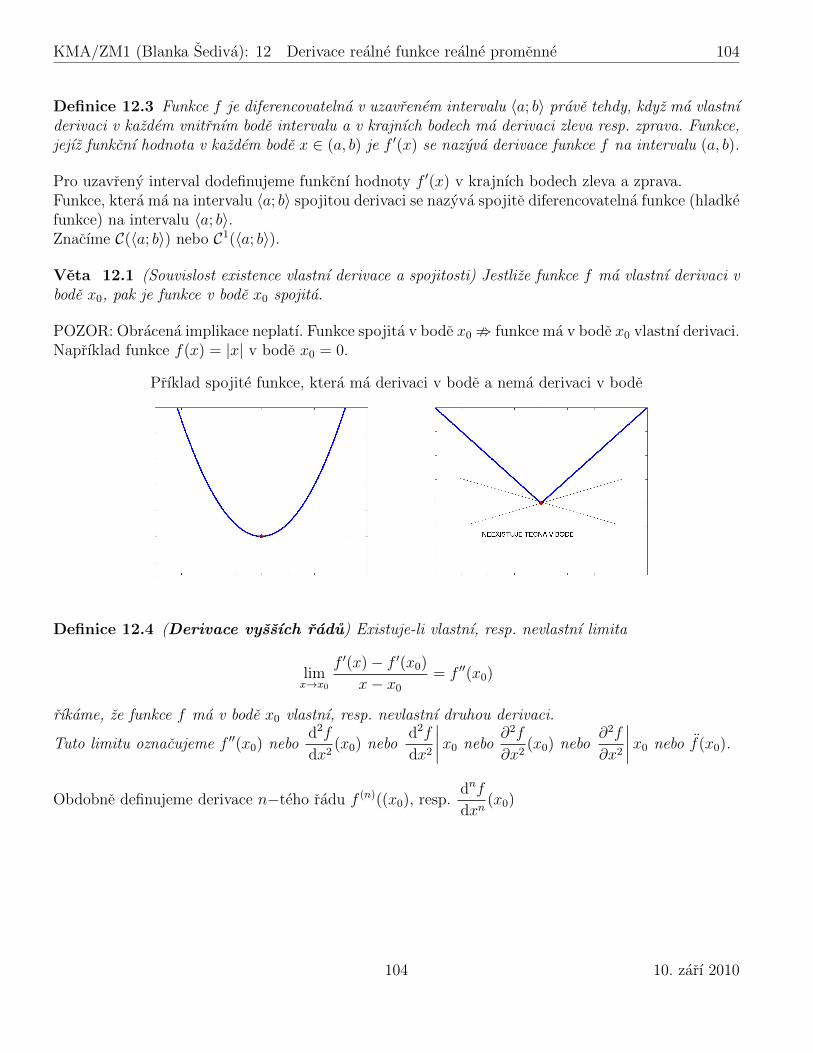



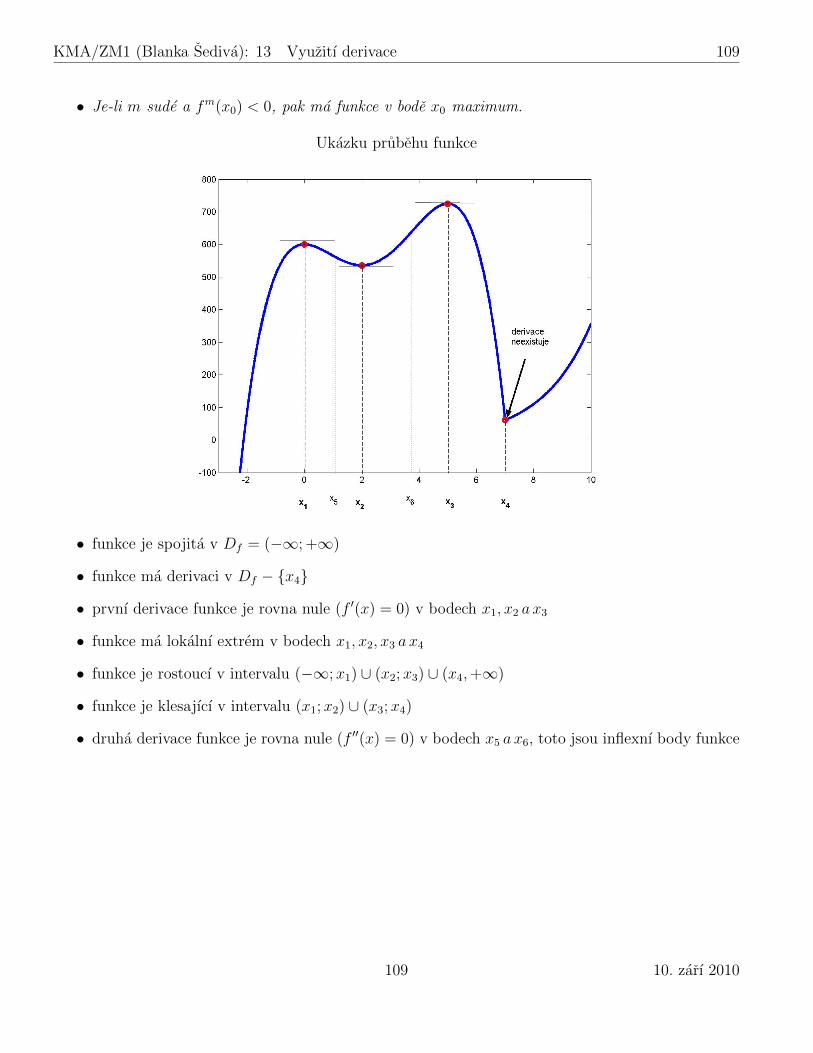
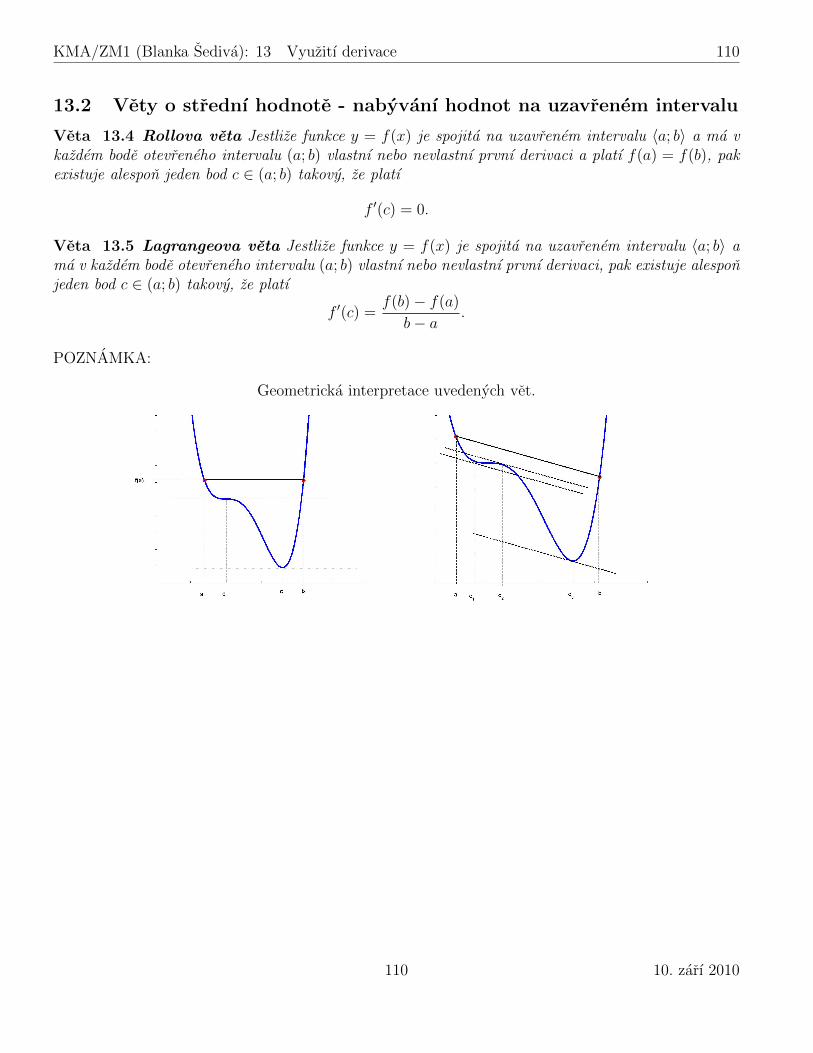

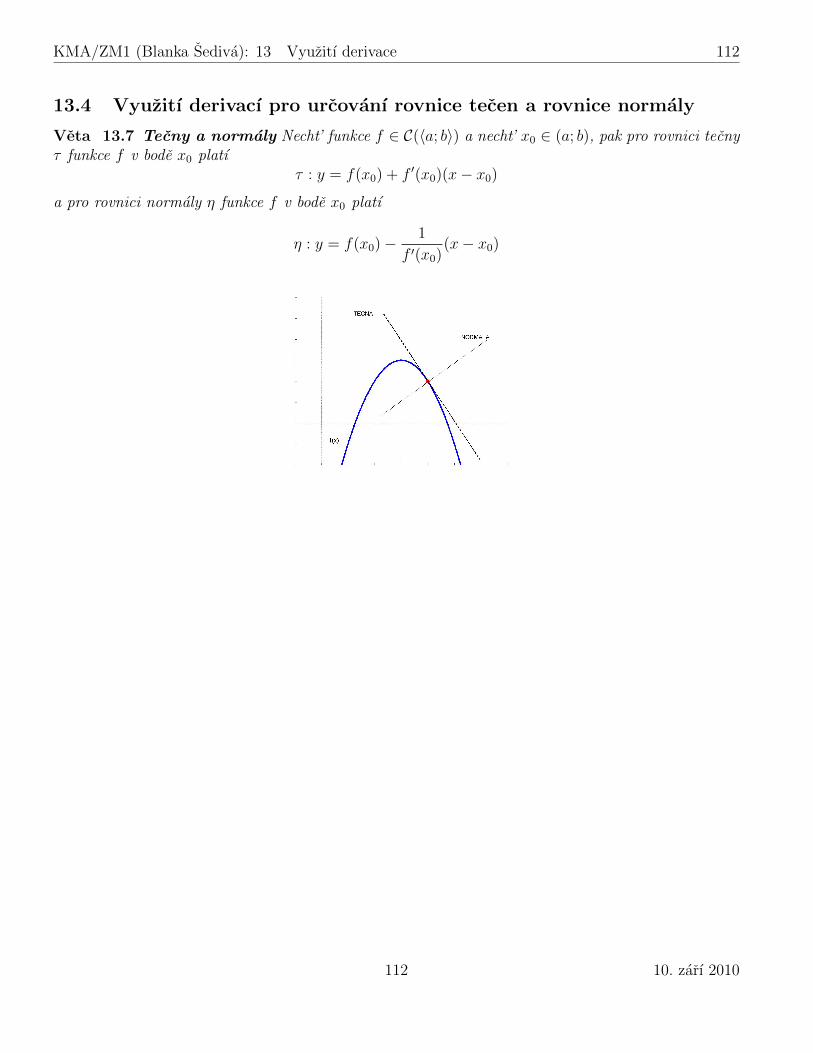

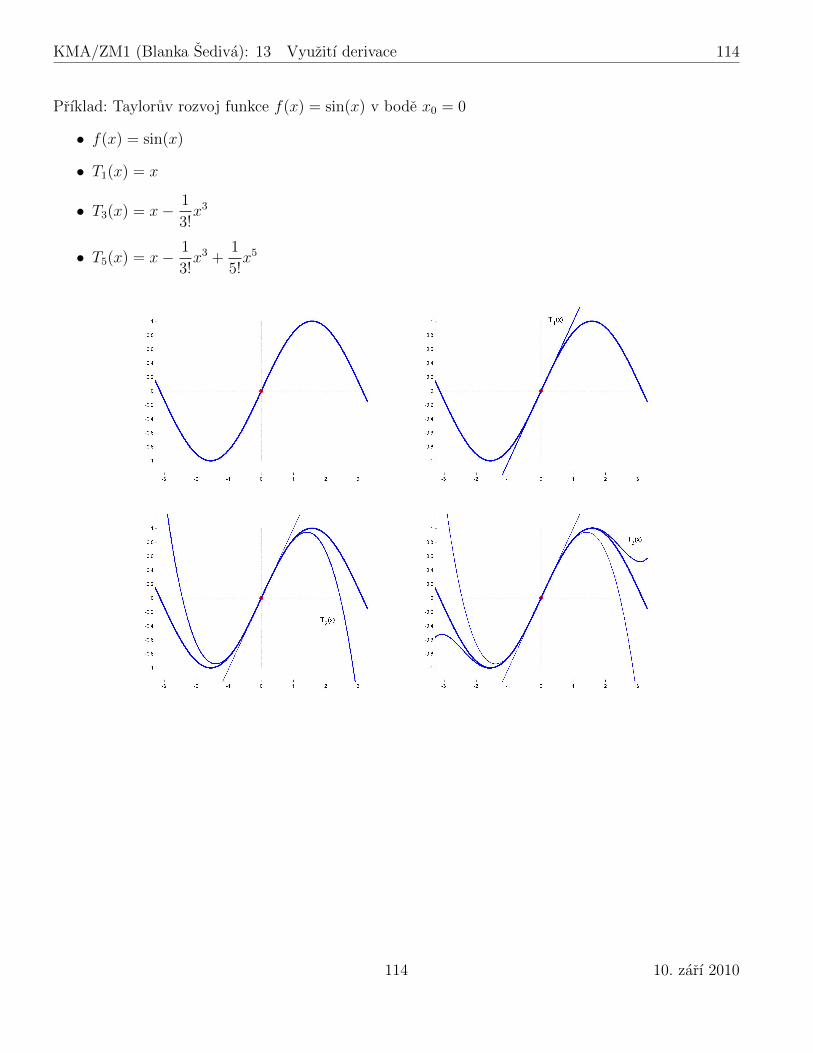












![prvaci UK 2016 [režim kompatibility] · Univerzitní knihovna ZČU Pedagogická knihovna - Klatovská 51 FPE + studovna - Veleslavínova 42 Knihovna Bory - Univerzitní 18 FAV, FEL,](https://static.dokumenty.site/doc/80x56/5f0b54c67e708231d42ffccc/prvaci-uk-2016-reim-kompatibility-univerzitn-knihovna-zoeu-pedagogick-knihovna.jpg)






![Matematika a management [3pt] Nový studijní obor na FAV ...home.zcu.cz/~honik/talks/2009-02-19-Praha-Matematika_a_management.pdf · I Matematika pro management I Základy business](https://static.dokumenty.site/doc/80x56/5d51853588c993df708bcfee/matematika-a-management-3pt-novy-studijni-obor-na-fav-homezcuczhoniktalks2009-02-19-praha-matematikaa.jpg)