1 Katedra stavební mechaniky Fakulta stavební, VŠB - Technická univerzita Ostrava Stavební statika, 1.roník bakaláského studia Pohyblivé zatížení • Píinkové áry na prostém nosníku, konzole a spojitém nosníku s vloženými klouby 2 Pohyblivé zatížení Vzniká pojíždním vozidel (vlaky, automobily, jeáby) po stavební konstrukci (mosty, jeábové dráhy, nájezdové rampy, podlahy garáží). Tlak kola – bodové síly. Nápravový tlak. Ideální vlaky (vozidla). Dynamické úinky zatížení (rázy, otesy, rozkmitání konstrukce)- výpoet lze zjednodušit využitím tzv. dynamického souinitele, kterým násobíme pohyblivé zatížení a tím lze zkoumat pouze jeho statické úinky. 3 Píinkové áry na prostém nosníku bez pevislých konc. konst c = ′ l d , 0 ∈ b R bz a R az P=1 c c´=l - c l ešení s využitím píinkových ar , které se sestrojí pro jednoduché vozidlo v podobjediné bezrozmrné jednotkové svislé bodové síly. c Pro odvození píinkových ar rzných sledovaných veliin – statická a kinematická metoda. l x , 0 ∈ . konst c = Píinková ára sleduje promnlivost statické veliiny (reakce, vnitní síly), která se váže k jedinému místu (prezu) c . l x , 0 ∈ e x d l - x Znaení délkových rozmr: l e , 0 ∈ 4 ( ) az L x R V = ( ) x R M az L x . = Nejjednodušší zatžovací stavy prostých nosníkb R bz a R az F e d l Reakce Posouvající síla Ohybový moment ( ) ↑ = l d F R az . ( ) ↑ = l e F R bz . 1 () ( ) e R M M az e x . 1 = = = - + + c l x , 0 ∈ e x , 0 ∈ l e x , ∈ ( ) F R V az L x - = e x , 0 ∈ l e x , ∈ ( ) ( ) e x F x R M az L x - - = . . ( ) ( ) x l R M bz P x - = . () ( ) d R M M bz e x . 1 = = = l d F. l e F. - d R e R bz az . . = M V c V c M c ( ) bz P x R V - = l x , 0 ∈
Transcript
1
Katedra stavební mechanikyFakulta stavební, VŠB - Technická univerzita Ostrava
Stavební statika, 1.ro�ník bakalá�ského studia
Pohyblivé zatížení
• P�í�inkové �áry na prostém nosníku, konzole aspojitém nosníku s vloženými klouby
2
Pohyblivé zatížení
Vzniká pojížd�ním vozidel (vlaky, automobily, je�áby) po stavební konstrukci (mosty, je�ábové dráhy, nájezdové rampy, podlahy garáží).
Tlak kola – bodové síly.
Nápravový tlak.
Ideální vlaky (vozidla).
Dynamické ú�inky zatížení (rázy, ot�esy, rozkmitání konstrukce)- výpo�et lze zjednodušit využitím tzv. dynamického sou�initele, kterým násobíme pohyblivé zatížení a tím lze zkoumat pouze jeho statické ú�inky.
3
P�í�inkové �áry na prostém nosníku bez p�evislých konc�
.konstc =′
ld ,0∈b
Rbz
a
Raz
P=1
c c´=l - c
l
�ešení s využitím p�í�inkových �ar, které se sestrojí pro jednoduché vozidlo v podob� jediné bezrozm�rné jednotkové svislé bodové síly.
c
Pro odvození p�í�inkových �ar r�zných sledovaných veli�in – statická a kinematická metoda.
lx ,0∈
.konstc =
P�í�inková �ára sleduje prom�nlivost statické veli�iny (reakce, vnit�ní síly), která se váže k jedinému místu (pr��ezu) c.
lx ,0∈
e � x d �l - x
Zna�ení délkových rozm�r�:
le ,0∈
4
( ) azLx RV =
( ) xRM azLx .=
Nejjednodušší zat�žovací stavy prostých nosník�
b
Rbz
a
Raz
F
e d
l
Reakce
Posouvající síla
Ohybový moment
( )↑=ldF
Raz
. ( )↑=leF
Rbz.
1
( ) ( ) eRMM azex .1 == =
-+
+
clx ,0∈ ex ,0∈
lex ,∈ ( ) FRV azLx −=
ex ,0∈
lex ,∈ ( ) ( )exFxRM azLx −−= ..
( ) ( )xlRM bzPx −= .
( ) ( ) dRMM bzex .1 == =
ldF.
leF.−
dReR bzaz .. =
M
V
c
Vc
Mc
( ) bzPx RV −=
lx ,0∈
2
5
( ) azLx RV =
( ) xRM azLx .=
Nejjednodušší zat�žovací stavy prostých nosník�
b
Rbz
a
Raz
F=1
e d
l
Reakce
Posouvající síla
Ohybový moment
( )↑=ld
Raz ( )↑=le
Rbz
1
( ) ( ) led
eRMM azex.
.1 === =
-+
+
c
lx ,0∈
ex ,0∈
lex ,∈ ( ) 1−= azLx RV
ex ,0∈
lex ,∈ ( ) ( )exxRM azLx −−= .1.
( ) ( )xlRM bzPx −= .
( ) ( ) lde
dRMM bzex.
.1 === =
ld
le−
lde
dReR bzaz.
.. ==
M
V
�ešení pro F=1
1
c
Vc
Mc
( ) bzPx RV −=
6
P�í�inkové �áry reakcí na prostém nosníku
ba
Ra=1P=1Reakce Raz a Rbz
ba
P=1
l
Rb=0
baRa=0 P=1Rb=1
4lxe =≡ ld .4
3≡
43=aR 4
1=bR
ba
P=1
l2
lxe =≡
21=aR 2
1=bR
2ld ≡
Jednotkové b�emeno P = 1
P m�ní polohu (p�sobišt�) – r�zné x
P�í�inková �ára sleduje prom�nlivoststatické veli�iny Sc, (nap�. Raz nebo Rbz)která se váže k jedinému místu (pr��ezu) c (podpora a nebo b) p�i zm�n� polohy zatížení P.
( )lx
lxl
ld
Raz −=−== 1
lx
le
Rbz ==
Statická veli�ina: reakce (Raz nebo Rbz)
Místo (pr��ez), ke kterému se p�í�inková �ára váže, je místo podpry (a nebo b)
7
P�í�inkové �áry reakcí na prostém nosníku
Po�adnice η p�í�inkové �áry reakcí jsou bezrozm�rná �ísla
Raz 1
1
le
bzR =η
le
ld
azR −== 1η
Prom�nlivé zatížení P = 1
P�í�inková �ára reakce Raz :(p�í�inková �ára vztažená k místu c�a, pro které platí x=0). Hodnota Raz od síly P=1, která m�ní své p�sobišt� (místo x) (x � ‹0,l›).
+
+
ba
P=1
e d
l
lx ,0∈
Reakce Raz a Rbz
Tady na obr.: Hodnota po�adnice �Razodpovídá velikosti reakce Raz p�i p�sobení jednotkové síly P v míst� (pr��ezu) x= d.
Rbz
ldRaz /= lxRbz /=
lx−1
lx
0=→≡ cac
lcbc =→≡
P�í�inková �ára reakce Rbz :(p�í�inková �ára vztažená k místu c�b, pro které platí x=l). Hodnota Rbz od síly P=1, která m�ní své p�sobišt� (místo x) (x� ‹0,l›).Tady na obr.: Hodnota po�adnice �Rbzodpovídá velikosti reakce Rbz p�i p�sobení jednotkové síly P v míst� (pr��ezu) x=d.
lx ,0∈
8
Definice p�í�inkové �áry
Raz
1
+
P�í�inková �ára je grafické znázorn�ní funkce, která vyjad�uje závislost sledované statické veli�iny Sc v míst� c(nap�íklad tady Raz v bod� a, tedy místo,kde x = 0� c = 0) na prom�nné poloze bezrozm�rné jednotkové síly P=1popsané nezávisle prom�nnou vzdáleností x.
b
Rbz
a
Raz
P=1
e d =l - e
l
d
lx ,0∈
.konstc =
lx−1
le
ld
azR −== 1η0=
≡c
ac
lx ,0∈
( )lx
lxl
ld
Raz −=−== 1
Pom�cka:p�i výpo�tu �
možno využít podobnosti
trojúhelník�
3
9
P�í�inkové �áry reakcí na prostém nosníku
b
Rbz
a
P=1
l
Raz
1
Rbz
14
1== lx
bRη
+
+
4lex =≡ lxld .4
3=−=
43==
azRazR η
41==
bzRbzR η
Reakce Raz a Rbz ?
Raz
431 ==−= l
dl
xaRη
4lx =
0=≡
c
ac
lc
bc
=≡
Jednotkové zatížení P=1 v poloze x=d
10
P�í�inkové �áry reakcí na prostém nosníku
η==→= azc RSP 1 pro
η.1 pro PRP az =→≠
b
Rbz
a
l
Raz
1
Rbz
1l
xbzR =η
+
+
x xld −=
Reakce Raz a Rbz ?
Raz
ld
lx
azR =−= 1η
lx ,0∈1≠P
0=≡
cac
lc
bc
=≡
Zatížení P v poloze x=d není jednotkové
11
P�í�inkové �áry reakcí na prostém nosníku - p�íklad
b
Rbz
a
P=20kN
l=7
Raz
1
Rbz
17143,075 ==Rbzη
2857,072
751 ==−=Razη
+
+
5=x 2=− xl
kN7143,572
.20. === Razaz PR η
kN2857,1475
.20. === Rbzbz PR η
Raz
Reakce Raz a Rbz ?
0=≡
c
ac
lc
bc
=≡
12
Využití p�í�inkových �ar pro výpo�et ú�ink� nehybného zatížení
Výpo�et ú�ink� nehybnéhozatížení pomocí p�í�inkové �áry
(a)
(b)
(c)
(d)
�=
=n
iiic PS
1
.η
( ) ( )�=d
caz xxxqR d.η
pro q(x)=konst.
( ) cd
d
caz AqxxqR .d. == �η
P�sobí-li na nosníku n sil Pi (i=1, 2, ..., n)
Sou�et p�ísp�vk� (p�í�ink�) jednotlivých sil
P�sobí-li na nosníku q=q(x) v úseku dxc ≤≤
V p�ípad� konstantního spojitého zatížení je velikost reakce p�ímo úm�rná ploše pod p�í�inkovou �árou v míst� p�sobení q.
4
13
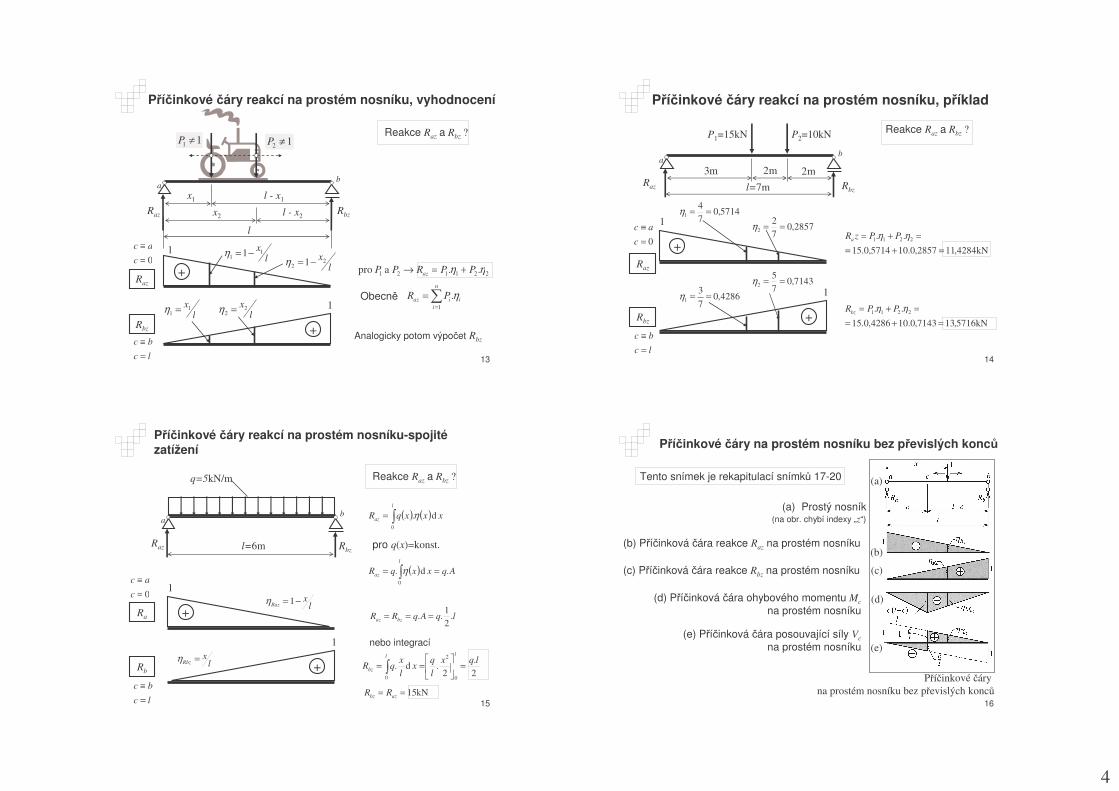
P�í�inkové �áry reakcí na prostém nosníku, vyhodnocení
b
Rbz
a
Raz
x1 l - x1
l
Raz
1
Rbz
1l
x11 =η
lx1
1 1−=η
+
+
221121 ..a pro ηη PPRPP az +=→
x2 l - x2
lx2
2 1−=η
lx2
2 =η
0=≡
c
ac
lc
bc
=≡
Reakce Raz a Rbz ?12 ≠P11 ≠P
Obecn� �=
=n
iiiaz PR
1
.η
Analogicky potom výpo�et Rbz
14
P�í�inkové �áry reakcí na prostém nosníku, p�íklad
b
Rbz
a
P2=10kN
l=7m
Raz
1
Rbz
17143,0
75
2 ==η
2857,072
2 ==η
+
+
m3
kN4284,112857,0.105714,0.15
.. 2211
=+==+= ηη PPzRa
m2 m2
P1=15kN
4286,073
1 ==η
5714,074
1 ==η
kN5716,137143,0.104286,0.15
.. 2211
=+==+= ηη PPRbz
Raz
0=≡
c
ac
lcbc
=≡
Reakce Raz a Rbz ?
15
P�í�inkové �áry reakcí na prostém nosníku-spojité zatížení
b
Rbz
a
l=6m
Ra
1
Rb
1
+
+ 2.
2.d.
0
2
0
lqxlq
xlx
qRll
bz =��
���
�== �
q=5kN/m
kN15== azbz RR
( ) ( )�=l
az xxxqR0
d.η
lx
Rbz =η
lx
Raz −= 1η
Raz
0=≡
c
ac
lc
bc
=≡
Reakce Raz a Rbz ?
pro q(x)=konst.
( ) AqxxqRl
az .d.0
== �η
lqAqRR bzaz .21
.. ===
nebo integrací
16
P�í�inkové �áry na prostém nosníku bez p�evislých konc�
P�í�inkové �áry na prostém nosníku bez p�evislých konc�
(a)
(b)
(c)
(d)
(e)
(b) P�í�inková �ára reakce Raz na prostém nosníku
(c) P�í�inková �ára reakce Rbz na prostém nosníku
(d) P�í�inková �ára ohybového momentu Mcna prostém nosníku
(e) P�í�inková �ára posouvající síly Vcna prostém nosníku
(a) Prostý nosník(na obr. chybí indexy „z“)
Tento snímek je rekapitulací snímk� 17-20
5
17
P=1
P�í�inkové �áry Vc na prostém nosníku
( )0=cV
( )0=cV
P=1
P=1
a
ba
l4
lx = l.43
43=azR 4
1=bzRc
b
P=1
l2
lx =
21=azR 2
1=bzR
2l
c
baRaz=0 Rbz=1c
baRaz=1 Rbz=0c
3lc =
25,0−=cV+75,0
V
25,0−-
5,0=cV -
5,0 V
5,0−
+
3. lkonstc == lx ,0∈
P�í�inková �ára sleduje prom�nlivoststatické veli�iny Sc, (tady posouvající sílu V) která se váže k jedinému místu(pr��ezu) c (tady c=l ⁄3) p�i zm�n�polohy P.
Posouvající síla Vc
18
P�í�inkové �áry Vc na prostém nosníku
b
Rb
a
Ra
P=1
e=x d=l - x
l
Vc
1
+
c
-1
-
caVc Vlc
lc ≅==−=′
= 6,032
1max,η
cbVc Vlc ≅−=−=−= 3,0
31
min,η
3lc = lclc ⋅=−=′ 3
2
v pr��ezu c je jednotkový skok �=1
1=δ
Po�adnice η p�í�inkové �áry posouvající síly jsou bezrozm�rná �ísla
cx ≤≤0
��
� −=−=−==le
lx
RV bzVcc η
lxc ≤≤
��
�=−===ld
lx
RV azVcc 1η
Levá v�tev
Pravá v�tev
3. lkonstc ==
lx ,0∈ bude-li P vlevo od pr��ezu c, potom Vc= -Rbz (viz snímek 17)
Velikost posouvající síly Vcv závislosti na poloze síly P :
bude-li P vpravo od pr��ezu c, pak Vc= Raz (viz snímek 17)
Velikost posouvající síly Vcv závislosti na poloze síly P :
P je v bod� (pr��ezu) c�Vca, Vcb
19
P�í�inkové �áry Mc na prostém nosníkuOhybový moment Mc
ba
P=1
l4
l ld .43=
43=azR 4
1=bzR
ba
P=1
3l
32=azR 3
1=bzR
ld .32=
3lc =
( ) llRM bzP
lc.
61
.32
.3
===
( ) ll
RM azL
lc.
92
3.
3==
=
c
c
ba
P=1
2l
21=azR 2
1=bzR
2ld =
( ) ll
RM azL
lc.
61
3.
3==
=
c
lclc .32=−=′
+M
+M
+M
P�í�inková �ára sleduje prom�nlivost statické veli�iny Sc, (tady ohybový moment M) která se váže k jedinému místu (pr��ezu) c (tady c=l ⁄3).
3. lkonstc == lx ,0∈
( ) ll
RM bzP
lc.
92
3.2
.3
===
20
( )
( ) ( )l
lll
lclc
lcc
Mclcx
⋅=⋅⋅=−⋅
=′⋅====
92323/
max,3/2 ηη
P�í�inkové �áry Mc na prostém nosníku
lcc
dRM bzMcc
′⋅=⋅==η
b
Rb
a
Ra
P=1
x d = l - x
l
Mc
c
3lc = ( ) lclc ⋅=−=′ 3
2
v pr��ezu c je jednotkové zalomení
+
Rozm�rem po�adnice η p�í�inkové �áry je délka
1=ϕ1=ϕ
( ) ll
ll
lx ⋅=⋅⋅== 61
321
44/1η ( ) ll
ll
lx .61
31
22/3 =⋅⋅==η
( ) clx
clRM bzMcc ′⋅=−⋅== η
lxc ≤≤
( )c
lxl
cRM azMcc ⋅−=⋅== η
3. lkonstc == lx ,0∈ cx ≤≤0Levá v�tevbude-li P vlevo od pr��ezu c, potom Mc= Rbz.(l-c)Velikost ohybového momentu Mcv závislosti na poloze síly P :
Pravá v�tevbude-li P vpravo od pr��ezu c, potom Mc= Raz.cVelikost ohybového momentu Mcv závislosti na poloze síly P :
c´=
l -c
= 2
/3 .
l
c =
1/3
. l
lcc
cRM azMcc⋅′=⋅==η
pro x=c�(l-c)=c´:
pro x=c�(l-c)=c´:
6
21
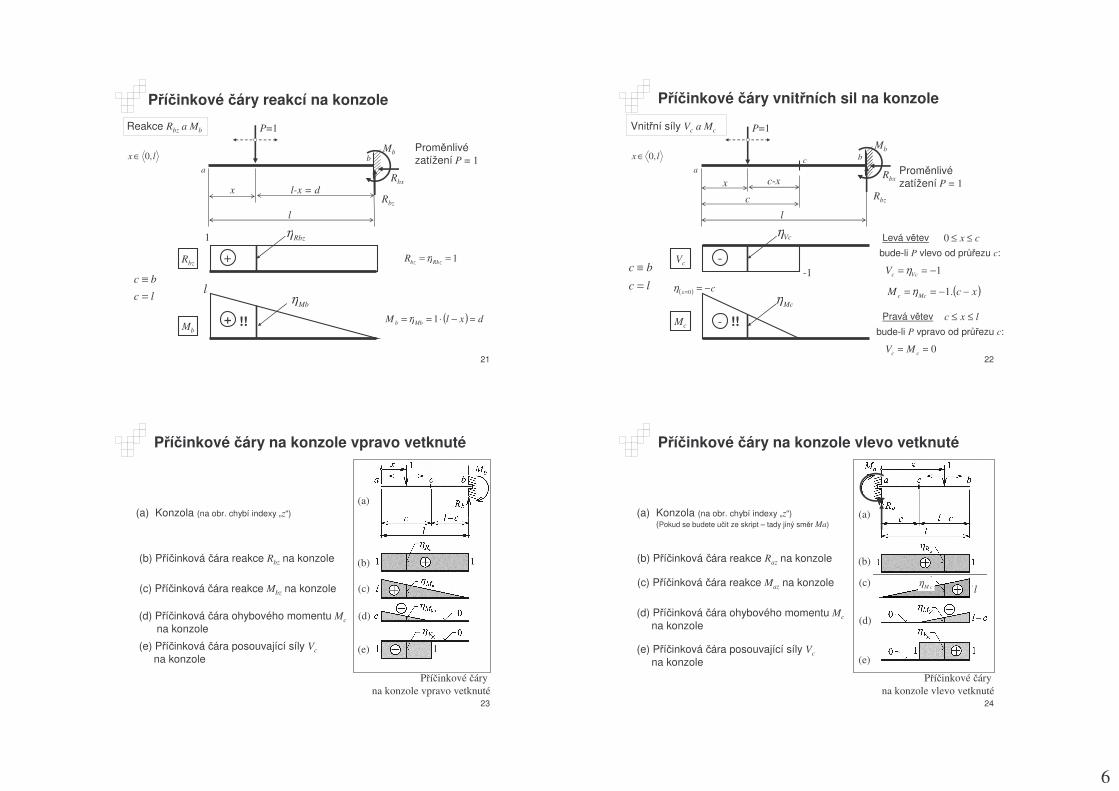
P�í�inkové �áry reakcí na konzole
Reakce Rbz a Mb
a
P=1
x
l
Rbz
1 Rbzη
Prom�nlivé zatížení P = 1
+
b
Mb+
Mbηl
lc
bc
=≡
lx ,0∈
1== RbzbzR η
( ) dxlM Mbb =−⋅== 1η
l-x = dRbz
Mb
Rbx
!!
22
P�í�inkové �áry vnit�ních sil na konzole
0== cc MV
Vnit�ní síly Vc a Mc
a
P=1
x
l
Vc
-1
Vcη
Prom�nlivé zatížení P = 1
-
bc
c
Mc -Mcη
( ) cx −==0η
lx ,0∈
1−== VccV η
( )xcM Mcc −−== .1η
cx ≤≤0Levá v�tev
bude-li P vlevo od pr��ezu c:
lxc ≤≤Pravá v�tev
bude-li P vpravo od pr��ezu c:
lc
bc
=≡
Rbz
Mb
Rbxc-x
!!
23
P�í�inkové �áry na konzole vpravo vetknuté
P�í�inkové �áry na konzole vpravo vetknuté
(a)
(b)
(c)
(d)
(e)
(b) P�í�inková �ára reakce Rbz na konzole
(c) P�í�inková �ára reakce Mbz na konzole
(d) P�í�inková �ára ohybového momentu Mcna konzole
(e) P�í�inková �ára posouvající síly Vcna konzole
(a) Konzola (na obr. chybí indexy „z“)
24
P�í�inkové �áry na konzole vlevo vetknuté
cMη
P�í�inkové �áry na konzole vlevo vetknuté
(a)
(b)
(c)
(d)
(e)
(b) P�í�inková �ára reakce Raz na konzole
(c) P�í�inková �ára reakce Maz na konzole
(d) P�í�inková �ára ohybového momentu Mcna konzole
(e) P�í�inková �ára posouvající síly Vcna konzole
l
(a) Konzola (na obr. chybí indexy „z“) (Pokud se budete u�it ze skript – tady jiný sm�r Ma)
7
25
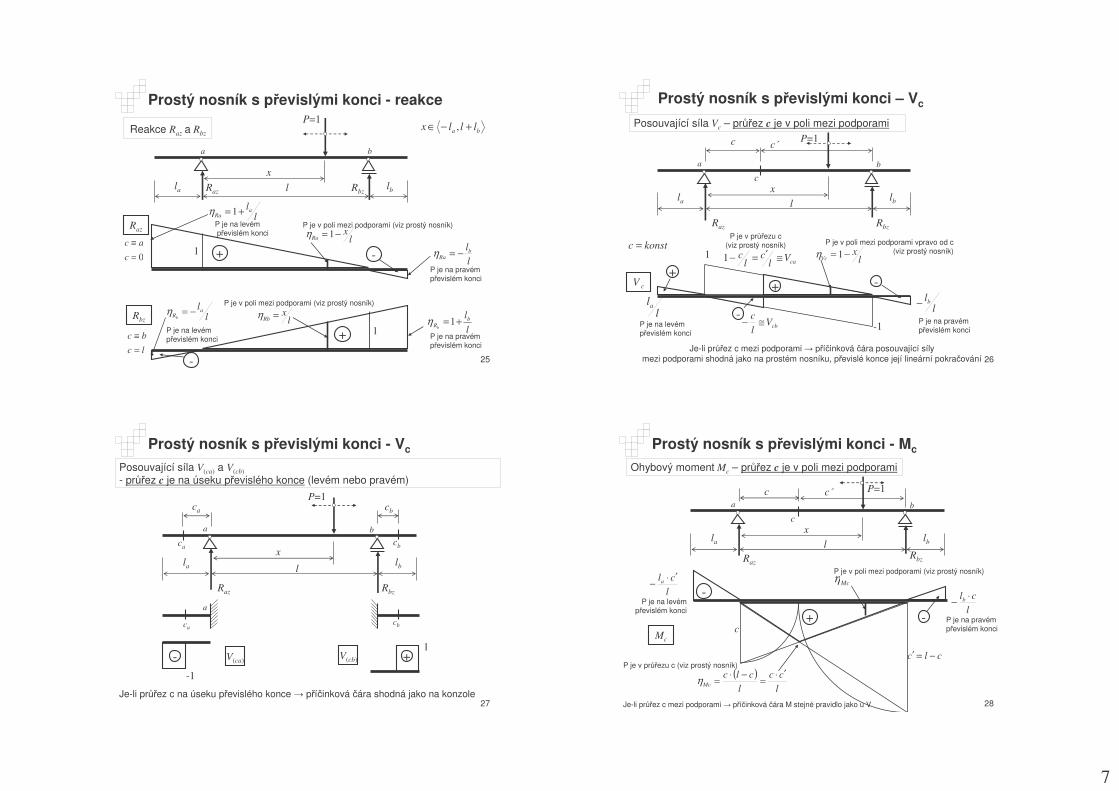
Prostý nosník s p�evislými konci - reakce
b
Rbz
a
Raz l lbla
P=1Reakce Raz a Rbz
Raz
1l
xRa −= 1η
+
lla
Ra += 1η
- llb
Ra −=η
Rbz
1+
-
ba lllx +−∈ ,
x
lla
Rb−=η
lx
Rb =ηllb
Rb+=1η
lc
bc
=≡
0=≡
c
ac
P je na levémp�evislém konci
P je na pravém p�evislém konci
P je v poli mezi podporami (viz prostý nosník)
P je v poli mezi podporami (viz prostý nosník)
P je na pravém p�evislém konci
P je na levém p�evislém konci
26
Prostý nosník s p�evislými konci – Vc
b
Rbz
a
Raz
l
c
lbla
P=1Posouvající síla Vc – pr��ez c je v poli mezi podporami
V c
1
+
-1-
caVlc
lc ≅′=−1
-+
cbVlc ≅−
lla l
lb−
lx
Vc −= 1η
x
c
konstc = P je v poli mezi podporami vpravo od c (viz prostý nosník)
P je na pravém p�evislém konci
P je na levém p�evislém konci
P je v pr��ezu c (viz prostý nosník)
Je-li pr��ez c mezi podporami � p�í�inková �ára posouvající sílymezi podporami shodná jako na prostém nosníku, p�evislé konce její lineární pokra�ování
c´
27
Prostý nosník s p�evislými konci - Vc
a
cacb
-1
- V(cb)
1+
Posouvající síla V(ca) a V(cb)- pr��ez c je na úseku p�evislého konce (levém nebo pravém)
b
Rbz
a
Raz
l
ca
lbla
P=1
x
ca cb
cb
V(ca)
Je-li pr��ez c na úseku p�evislého konce � p�í�inková �ára shodná jako na konzole28Je-li pr��ez c mezi podporami � p�í�inková �ára M stejné pravidlo jako u V
Prostý nosník s p�evislými konci - Mc
Mc
+
-
-
( )lcc
lclc
Mc
′⋅=−⋅=η
c
clc −=′
Mcη
lclb ⋅−
lcla ′⋅−
b
Rbz
a
Raz
l
c
lbla
P=1
x
c
Ohybový moment Mc – pr��ez c je v poli mezi podporami
P je v poli mezi podporami (viz prostý nosník)
P je v pr��ezu c (viz prostý nosník)
P je na levémp�evislém konci
P je na pravém p�evislém konci
c´
8
29
Prostý nosník s p�evislými konci - Mc
a
- -
Ohybový moment M(ca) a M(cb)- pr��ez c je na úseku p�evislého konce (levém nebo pravém)
b
Rb
a
Ra
l
ca
lbla
x
ca cb
cb
cacb
M(ca) M(cb)
( ) ( )aacaM cl −−=η ( ) ( )bbcbM cl −−=η
P=1
Je-li pr��ez c na úseku p�evislého konce � p�í�inková �ára shodná jako na konzole
lb-cb
30
P�í�inkové �áry na prostém nosníku s p�evislými konci
P�í�inkové �áry na prostém nosníku s p�evislými konci
(a)
(b)
(c)
(d)
(e)
(f)
(b) P�í�inková �ára reakce Raz
(c) P�í�inková �ára reakce Rbz
(d) P�í�inková �ára ohybovéhomomentu Mc v poli
(e) P�í�inková �ára posouvající síly Vcv poli
(f) P�í�inková �ára ohybovéhomomentu Ma nad podporou a
(a) Nosník s p�evislými konci(na obr. chybí indexy „z“)
31
Je-li sledovaný pr��ez i zatížení na neseném prutu � p�í�inkové �áry na nesené �ásti shodné jako na prostém nosníku. Bude-li zatížení na nesoucí �ásti, vliv se neprojeví v �ásti nesené �p�í�inková �ára za kloubem nenavazuje na pr�b�h v nesené �ásti a je nulová.
P�í�inkové �áry na spojitém nosníku s vloženými klouby
P�í�inkové �áry na spojitém nosníku s vloženým kloubem
(a)
(b)
(c)
(d)
(e)
(f)
�ást nesená a - dsledovaný pr��ez je na nesené �ásti(tady bod e)
(c) P�í�inková �ára reakce Raz
(d) P�í�inková �ára interakce Rdz
(e) P�í�inková �ára ohybovéhomomentu Me
(f) P�í�inková �ára posouvající síly Ve
32
P�í�inkové �áry na spojitém nosníku s vloženými klouby
P�í�inkové �áry na spojitém nosníku
s vloženým kloubem
(a)
(b)
(g)
(h)
(i)
(j)
(k)
(l)
�ást nesoucí d - esledovaný pr��ez je na nesoucí �ásti(tady bod g v poli nebo bod f na p�evislém konci)
(g) P�í�inková �ára reakce Rbz
(h) P�í�inková �ára reakce Rcz
(j) P�í�inková �ára posouvající síly Vg v poli
(i) P�í�inková �ára ohybového momentu Mg v poli
(l) P�í�inková �ára posouvající síly Vf na p�evislém konci
(k) P�í�inková �ára ohybového momentu Mfna p�evislém konci
Je-li sledovaný pr��ez i zatížení na nesoucím prutu � p�í�inkové �áry na nesoucí �ásti shodné jako na prostém nosníku. V kloubu se p�í�inková �ára láme a lineárn� vede do nuly na konec nosníku, p�ípadn� do nulové hodnoty ve vedlejším kloubu. Za tímto kloubem je potom �ára nulová.
9
33
P�íklad
Zadání a �ešení p�íkladu 8.3Obr. 11.9. / str. 180
(a)
(b)
(c)
Zadání: Sestrojit p�í�inkové �áry Ma a Ms
34
Domácí úkol - donést do cvi�ení, kdy se bude probírat toto téma