45
UNIVERZITA OBRANY Fakulta vojenských technologií Katedra elektrotechniky S-3708 Praktikum z výkonové elektroniky Autor: Ing. Jan Leuchter, Ph.D. ISBN 978-80-7231-210-8 BRNO 2006
UNIVERZITA OBRANY Fakulta vojenských technologií
Katedra elektrotechniky S-3708
Praktikum z výkonové elektroniky
Autor: Ing. Jan Leuchter, Ph.D.
ISBN 978-80-7231-210-8
BRNO 2006
Obsah Obsah ……………………………………………………………………………………
Předmluva ………………………………………………….……………………………
1. Úvod do výkonové elektroniky ……………………………………………………..
2. Prvky pro výkonovou elektroniku …………………………………………………..
3. Obvody výkonové elektroniky ……………………………………………...………
4. Laboratorní cvičení: …………………………………………………………………
Organizace a pokyny k laboratorním cvičením ………………………….. 1-LC: Měření základních elektrických vlastností výkonové diody ...…… 2-LC: Měření elektrických vlastností výkonových spínačů (I) ………….. 3-LC: Měření elektrických vlastností výkonových spínačů (II) …………. 4-LC: Vlastnosti neřízených diodových usměrňovačů ………………..... 5-LC: Stejnosměrný pohon napájený z řízeného usměrňovače s
tyristory 6-LC: Měření na řízených usměrňovačích s IGBT tranzistory a s PWM 7-LC: Měření DC/DC měničů s indukčností a transformátorem ……….. 8-LC: Měření na DC/DC měničích (střídačích) ……………………….…. 9-LC: Asynchronní motor s měničem frekvence ………………………... 10-LC: Měření na fotovoltaických zdrojích elektrické energie ………….
Příloha 1: Obsah a osnova předmětu: „Výkonové polovodičové měniče“ …….…
Příloha 2: Popis frekvenčního měniče SIEMENS – SIMOVERT ……………….…
Literatura ………………………………………………………………………..………
2
3
4
7
23
29
29
30 31 32
34 35
37
38
40 41
42
43
44
45
2
Předmluva
Skriptum „Praktikum z výkonové elektroniky“ je směřováno posluchačům fakulty
Vojenských technologií jak pro elektrotechnické obory, tak pro strojní obory. Je určeno jako
pomůcka pro laboratorní praktika a k prohloubení samostatného studia v předmětu
magisterské nadstavby „Výkonové polovodičové měniče“ a „Zdroje elektrické energie
zbraňových systémů“.
Předmětem jsou moderní zapojení polovodičových pulsních měničů, spínané zdroje
elektrické energie a dále obvody používané v oblasti elektrických pohonů. Skriptum obsahuje
soubor 10-ti laboratorních úloh, které plně pokrývají obsahem i rozsahem požadavky na
domácí přípravu posluchačů v souladu s učebním programem. Některé obrázky a částečně i
text obrázků je v anglickém jazyce z důvodů pro seznámení se s anglickou terminologií. Z
hlediska metodického přístupu ke studiu je třeba zdůraznit specifický rys předmětu,
spočívající v encyklopedickém pojetí předmětu se širokým rozsahem fyzikálních teorií a
funkčních principů, na nichž jsou současné výkonové polovodičové měniče založeny. S tím
souvisí znalost velkého množství druhů součástek, měničů a jejich aplikačních možností,
které vzhledem k předchozí průpravě bakalářského studia ne každý student dokáže bez
samostatné přípravy v plném rozsahu dostatečně zvládnout. Bezesporu nejlepším
motivačním prvkem je zájem průmyslu (českého i zahraničního: Siemens; ABB; Škoda; Aero
Vodochody; atd.) o absolventy v oboru Výkonová elektronika.
Závěrem se omlouvám za případné chyby, které při zpracování skript vznikly a
současně předem děkuji za případné připomínky, které mohou přispět kvalitě zpracování
učebních fondů v budoucnosti.
Jan Leuchter
3
1. Úvod do Výkonové elektroniky
Moderní složité systémy, mezi něž lze samozřejmě zařadit soudobé a postupně
nasazované zbraňové systémy, jako jsou např. bojová vozidla, letadla, rakety a systémy
jejich řízení, systémy řízení palby, systémy protivzdušné obrany, radiolokační
a telekomunikační systémy, vyžadují zcela nový přístup k jejich konstruování a výrobě, ale
i nové způsoby organizace celého cyklu užití od nasazení do provozu, obsluhy, oprav až po
vyřazení z provozu. S tím ovšem souvisí potřeba nového přístupu k přípravě a zaměření
specialistů, kteří budou takovou techniku navrhovat, vyrábět, používat a organizovat její
provoz. Klasické, dnes již překonané rozdělení na strojní a elektrotechnické specializace, již
nestačí. Mohutný technický rozvoj ve většině technických oborů, zejména v elektrotechnice
a informační technice vedl postupně ke vzniku nových studijních oborů a specializací.
Vznikají různá mezioborová studia ve snaze využít více elektrotechniky, elektroniky a
výpočetní techniky v původně strojařských oborech.
Obr. 1.1. Výkonová elektronika (Power Electronics)
Výkonová elektronika se stává součástí výkonové elektrotechniky (dříve silnoproudé
elektrotechniky) a elektroenergetiky. Při značném zjednodušení je možné říci, že právě
výkonová elektronika spojuje mechaniku s elektronikou a s řídící technikou, viz obr. 1.1.
Obvody výkonové elektroniky umožnily přechod od elektromechanických kontaktních
způsobů ovládání a přeměny elektrické energie k bezkontaktním polovodičovým zařízením
a systémům, rotační měniče elektrické energie proměnily na statické polovodičové měniče.
4
Elektrická energie je nejvýznamnější formou energie, která nalezla již na začátku tohoto
století uplatnění v široké oblasti techniky. Užitná hodnota elektrické energie se výrazně
zvyšuje s možností měnit její parametry (napětí, proud, kmitočet, fázi, atd). Jeden z prvních
měničů byl selenový usměrňovač kolem roku 1880 a sloužil hlavně jako zařízení pro dobíjení
telefonních baterií. Kvalitativním pokrokem byl objev rtuťového usměrňovače v roce 1902.
Ten byl hromadně použit ve dvacátých letech v měnírnách elektrických drah. V roce 1928
byla zahájena výroba rtuťových usměrňovačů v ČKD. Dalším kvalitativním krokem byl objev
PN přechodu v roce 1947 využitého pro slaboproudou elektrotechniku. Pro silnoproudou
elektrotechniku byly použity výkonové diody a tyristory v roce 1955 a výkonové tranzistory
v roce 1964 [1]. V roce 1970 byl realizován výkonový bipolární tranzistor umožňující stavbu
stejnosměrných a střídavých měničů s pulsně šířkovou modulací (PWM). Od roku 1980 jsou
používány výkonové unipolární tranzistory MOSFET, vypínatelné tyristory GTO a tranzistory
s izolovanou bází IGBT (1990).
Současná etapa se vyznačuje dalším zvyšováním parametrů výkonových prvků,
jednak nástupem nových prvků jako jsou MCT tyristory (MOS Controlled Thyristor),
tranzistory SIT (Static Induction Transistor) a tyristor SITh (Static Induction Thyristor).
Souběžně s rozvojem součástek docházelo také k vývoji silových zapojení měničů,
komutačních obvodů a ochran součástek. S měnícími se parametry a technickými
vlastnostmi součástek výkonové elektroniky a z nich vyráběných měničů, došlo k rozšíření
využití této techniky i do dalších oblastí. Měniče výkonové elektroniky byly používány
v měnírnách elektrické trakce (např. městské hromadné dopravy) a dále byly např.
používány stejnosměrné regulační pohony ve válcovnách a na dolech, střídavé pohony byly
nasazeny jako regulační pohony čerpadel, kompresorů atd.
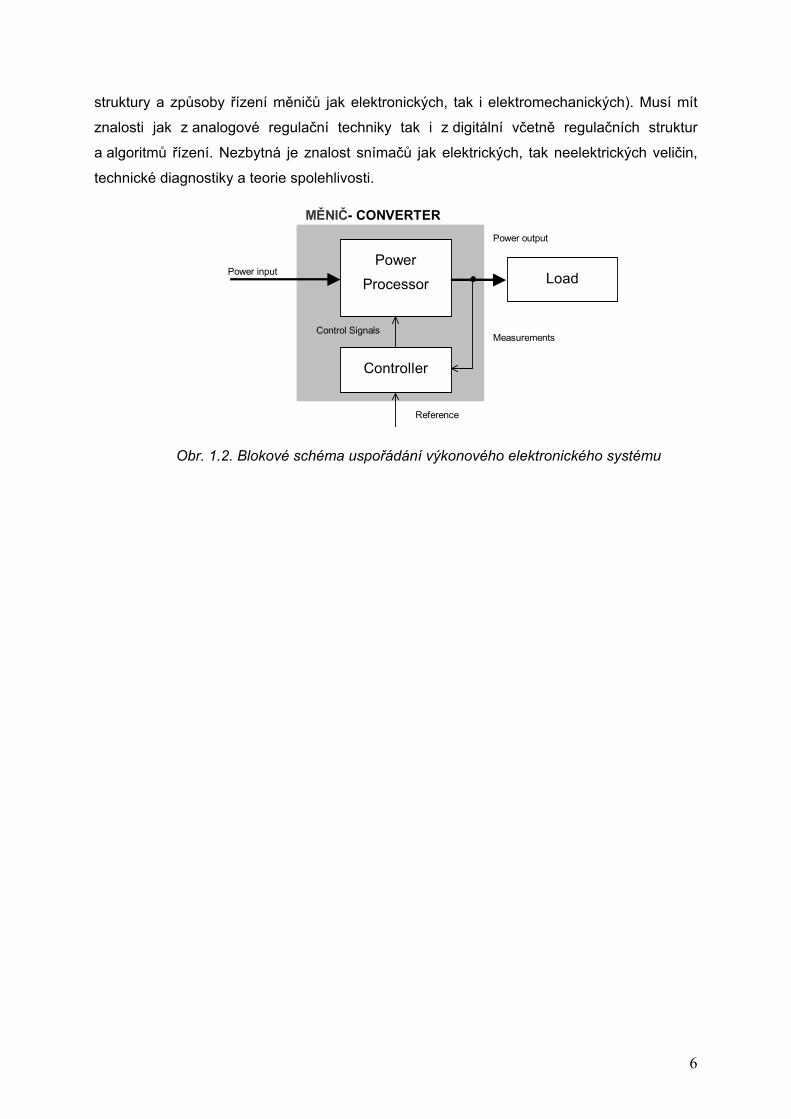
Blokové schéma základního uspořádání výkonového elektronického systému je na
obr. 1.2. Pro úplnost je obr. popsán anglickou terminologií. Systém je složen z vlastní
výkonové části (Power Processor) a dále z řídící jednotky (Controller) a zátěže (Load).
Výkonovou část tvoří elektromotor a výkonový měnič. Tuto soustavu je nutno řídit a tedy
nedílnou součástí je řídící a regulační systém, na jehož vstupy jsou přiváděny jednak žádané
hodnoty, jednak skutečné hodnoty ze zpětnovazebních snímačů. Řídící a regulační
podsystém je dnes realizován obvykle mikropočítačem s příslušnými přizpůsobovacími
obvody, realizovanými A/D a D/A převodníky, obvody programovatelných logických polí
a hardwarovými modulátory pro pulsně šířkovou modulaci. Výkonové mikropočítače
umožňují i aplikace moderních metod řízení elektrických pohonů, jakými jsou např. optimální
řízení, adaptivní řízení, fuzzy logické řízení a neuronové řízení. Systémový pohled na takový
systém vyžaduje znalost kinematického a dynamického popisu poháněcího zařízení, musí
znát metodiku dimenzování a musí mít znalosti z měničové techniky (prvky, obvodové
5
struktury a způsoby řízení měničů jak elektronických, tak i elektromechanických). Musí mít
znalosti jak z analogové regulační techniky tak i z digitální včetně regulačních struktur
a algoritmů řízení. Nezbytná je znalost snímačů jak elektrických, tak neelektrických veličin,
technické diagnostiky a teorie spolehlivosti.
Power Processor Load
Controller
Power input
Power output
Measurements
Reference
Control Signals
MĚNIČ- CONVERTER
Obr. 1.2. Blokové schéma uspořádání výkonového elektronického systému
6
2. Prvky pro výkonovou elektroniku
Výkonová elektronika má v současné době velké množství aplikací v celém rozsahu
výkonů od jednotek wattů pro obvody spotřební elektroniky po megawatty v oblasti distribuce
elektrické energie. Na jedné straně je možno ovládat stále větší výkony, na straně druhé jsou
realizovány složité výkonové integrované obvody pro náročné a velmi rychlé aplikace pro
systémy automatizovaného řízení. Těžiště pokroku je v součástkové základně výkonové
elektroniky, která se v současné době rozvíjí rychlým tempem. Kromě neustálého zvyšování
parametrů součástek se objevují i nové součástky a především klesá jejich cena. Současný
trend výrobců polovodičů pro výkonovou elektroniku je možné shrnou do následujících bodů:
nízká cena, snižování cen, vysoká spolehlivost, velké mezní proudy, velká mezní napětí,
rychlé spínání (krátká doba sepnutí a vypnutí spínače), nízké ztráty, vysoké kmitočty,
integrovatelnost, velikost a objem.
Výše uvedené trendy umožňují nové technologie ve výrobě polovodičů, nové polovodičové
prvky s velmi výhodnými statickými a dynamickými parametry, kvalitní a levnější materiály.
Nejstaršími prvky výkonové elektroniky, dodnes používanými, jsou výkonové diody
a tyristory. Pro použití tyristorů ve střídavých měničích byla nutná vnější komutace (vypnutí)
přídavnými komutačními obvody, spínací frekvence nepřevyšuje stovky Hz. Nevýhody
tyristorů – nemožnost vypnutí proudu řídícím impulsem – nemá novější typ tyristoru tzv.
vypinatelný GTO (Gate Turn Off). Významným přínosem je použití výkonových tranzistorů
s pulsní šířkovou modulací a s opakovacím kmitočtem řádově kHz.
MOS FET
IGBT
MCT
BT
GTO
Tyristory
Frekvence T
Napětí
Proud
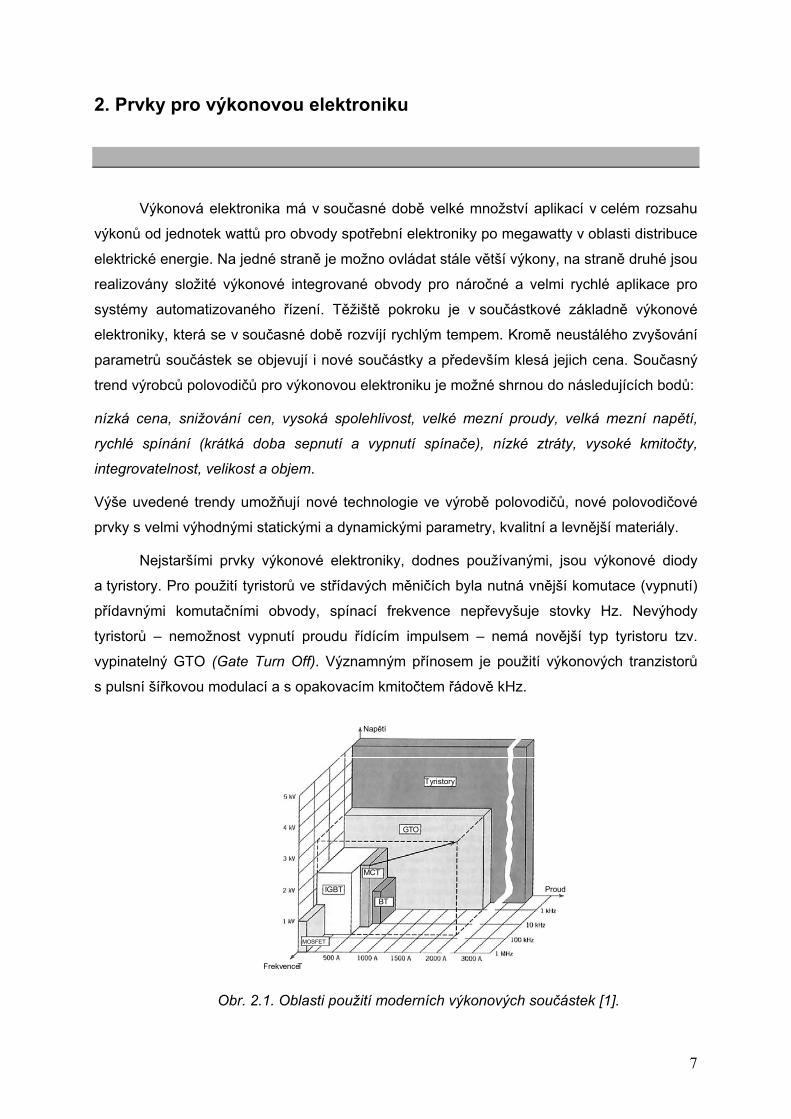
Obr. 2.1. Oblasti použití moderních výkonových součástek [1].
7
Prvním typem výkonového tranzistorového spínače byla dvojice bipolárních
tranzistorů v tzv. Darlingtonově zapojení s integrovanou diodou. Od počátku osmdesátých let
nastává rychlý rozvoj v oblasti výkonových polovodičových součástek řízených elektrickým
polem (MOSFET). Dále se prosazují struktury, které jsou založeny na spojení výhod
bipolárních součástek a součástek řízených polem, tzv. tranzistory s izolovanou bází (IGBT).
Na obr. 2.1 jsou uvedeny oblasti použití moderních výkonových součástek v závislosti na
spínaném výkonu, proudu a frekvenci spínání v letech 2000. Nejrychlejšími prvky jsou
tranzistory MOSFET, ale právě tranzistory řízené polem mají omezení možností spínání
malých výkonů. Nejvyšších výkonů dosahují tyristory, ty však umožňují spínání řádově
stovky Hz. Tranzistory IGBT jsou nepatrně pomalejší oproti tranzistorům MOSFET.
V současné době jsou vyráběny IGBT v rozsahu napětí 600 V < UCEM < 3000 V a pro proudy
2 A < IC < 1000 A při kmitočtech 10 – 80 kHz. Obr. 2.1 ukazuje důležitost IGBT
v stejnosměrných pulsních měničích a střídačích až do výkonů 500 kW.
Z výše uvedeného výčtu je zřejmé, že použití pro malé výkony (jednotky, desítky W)
jsou používány tranzistory MOSFET, které dosahují nejvyšších rychlostí spínání. Pro výkony
v řádech kilowattů jsou používány výhradně prvky IGBT a pro oblasti výkonů megawatů jsou
stále používány tyristory nebo nové moderní prvky na stejné bázi jako jsou tyristory. Použití
a význam bipolárních tranzistorů ve výkonových aplikacích klesá. Bipolární tranzistory do
proudů 10 A jsou plně nahraditelné tranzistory MOSFET. Darlingtonovy dvojice pro proudy
nad 15 A jsou nahrazeny tranzistory IGBT. Dále se nevyplatí vyrábět bipolární tranzistory
nad závěrné napětí 800 V , neboť významně klesá rychlost ve srovnání s tranzistory IGBT.
Požadavky na polovodičové spínací součástky, které na ně kladou aplikace, jsou
velmi vysoké a ve své podstatě jsou totožné s vlastnostmi ideálního spínače, který může být
charakterizován nulovým odporem v sepnutém stavu, nekonečná proudová zatížitelnost
v sepnutém stavu, nekonečný odpor ve vypnutém stavu, nekonečně velká napěťová
odolnost proti průrazu ve vypnutém stavu; nulová doba zapnutí a vypnutí.
DIODY
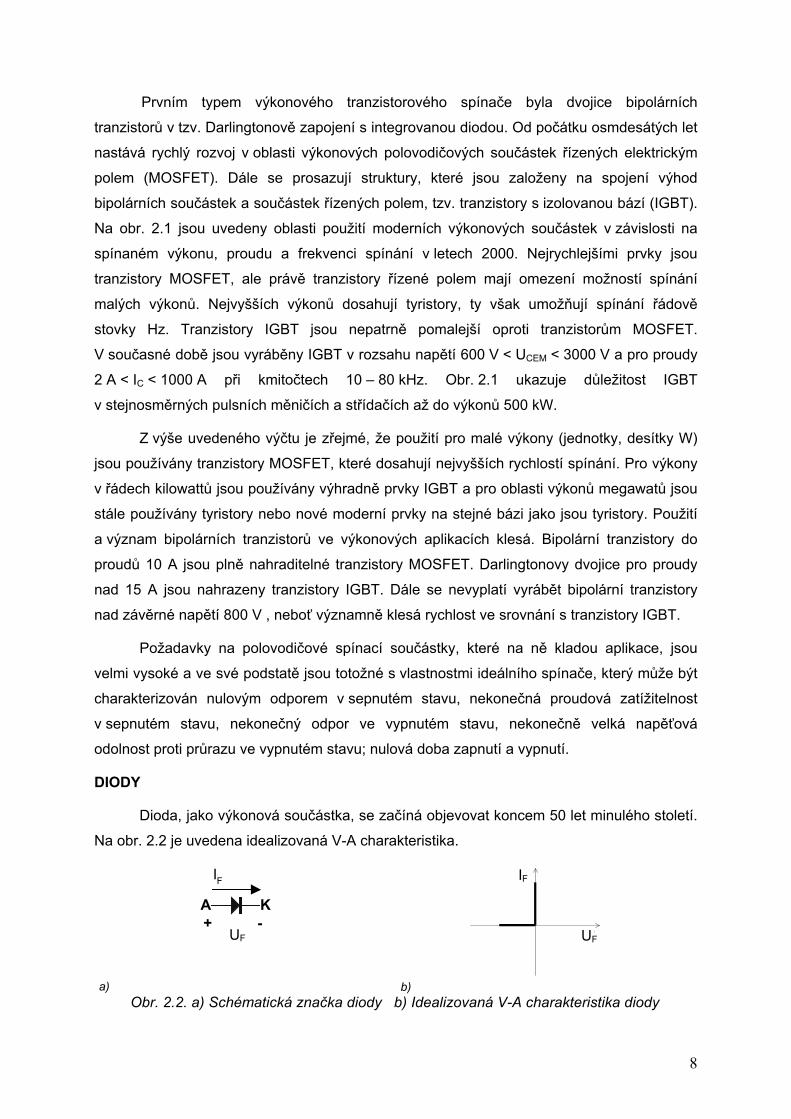
Dioda, jako výkonová součástka, se začíná objevovat koncem 50 let minulého století.
Na obr. 2.2 je uvedena idealizovaná V-A charakteristika.
I D
UF + - A K
F
U F
ID
UF
IF
a) b) Obr. 2.2. a) Schématická značka diody b) Idealizovaná V-A charakteristika diody
8
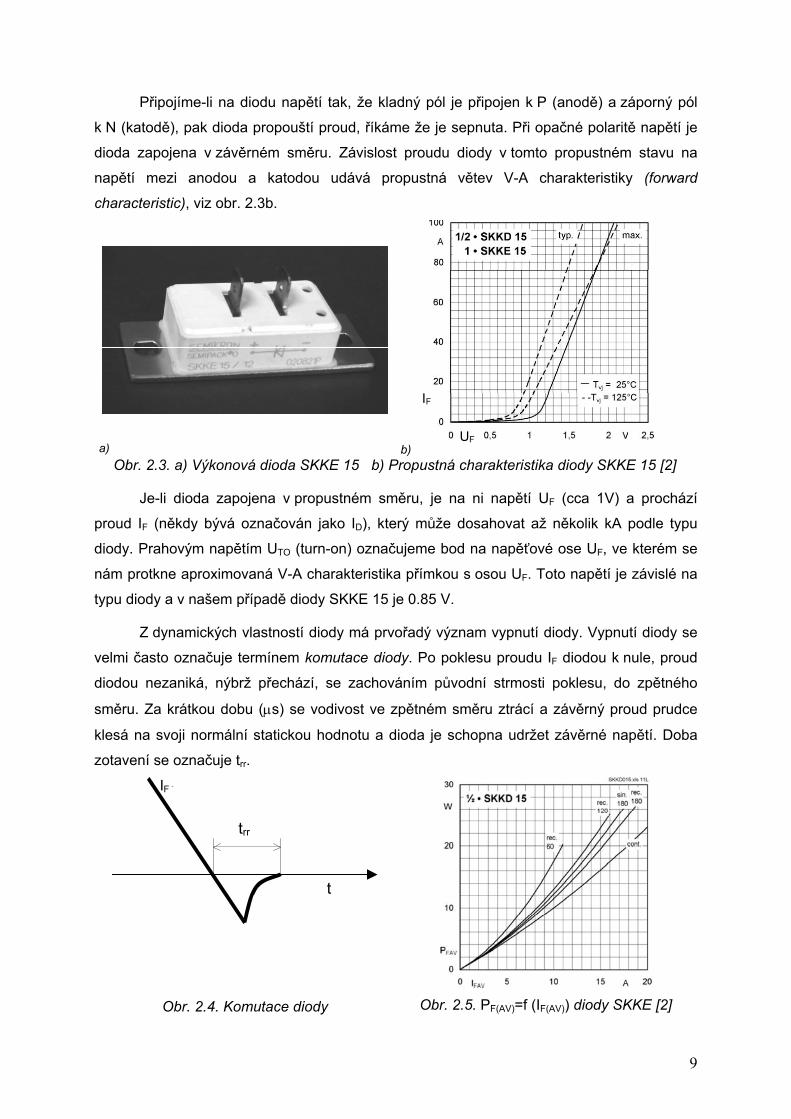
Připojíme-li na diodu napětí tak, že kladný pól je připojen k P (anodě) a záporný pól
k N (katodě), pak dioda propouští proud, říkáme že je sepnuta. Při opačné polaritě napětí je
dioda zapojena v závěrném směru. Závislost proudu diody v tomto propustném stavu na
napětí mezi anodou a katodou udává propustná větev V-A charakteristiky (forward
characteristic), viz obr. 2.3b.
a) b) Obr. 2.3. a) Výkonová dioda SKKE 15 b) Propustná charakteristika diody SKKE 15 [2]
UF
IF
Je-li dioda zapojena v propustném směru, je na ni napětí UF (cca 1V) a prochází
proud IF (někdy bývá označován jako ID), který může dosahovat až několik kA podle typu
diody. Prahovým napětím UTO (turn-on) označujeme bod na napěťové ose UF, ve kterém se
nám protkne aproximovaná V-A charakteristika přímkou s osou UF. Toto napětí je závislé na
typu diody a v našem případě diody SKKE 15 je 0.85 V.
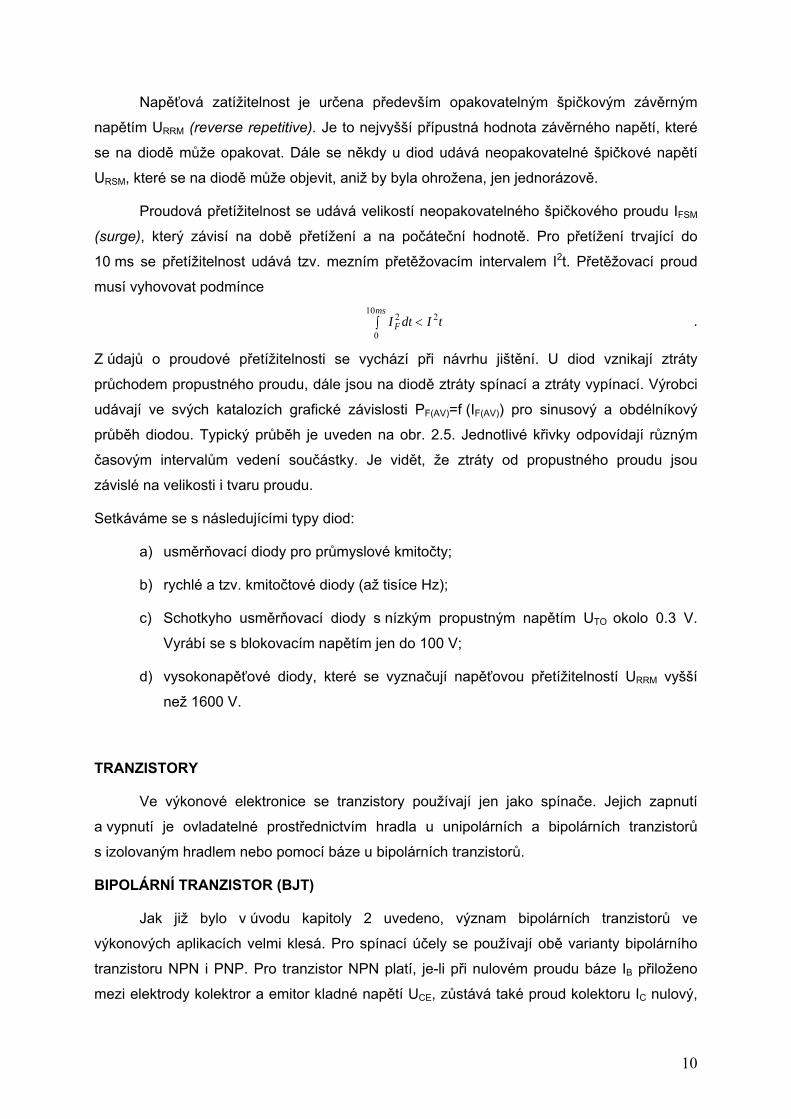
Z dynamických vlastností diody má prvořadý význam vypnutí diody. Vypnutí diody se
velmi často označuje termínem komutace diody. Po poklesu proudu IF diodou k nule, proud
diodou nezaniká, nýbrž přechází, se zachováním původní strmosti poklesu, do zpětného
směru. Za krátkou dobu (μs) se vodivost ve zpětném směru ztrácí a závěrný proud prudce
klesá na svoji normální statickou hodnotu a dioda je schopna udržet závěrné napětí. Doba
zotavení se označuje trr.
trr
t
ID IF
Obr. 2.4. Komutace diody Obr. 2.5. PF(AV)=f (IF(AV)) diody SKKE [2]
9
Napěťová zatížitelnost je určena především opakovatelným špičkovým závěrným
napětím URRM (reverse repetitive). Je to nejvyšší přípustná hodnota závěrného napětí, které
se na diodě může opakovat. Dále se někdy u diod udává neopakovatelné špičkové napětí
URSM, které se na diodě může objevit, aniž by byla ohrožena, jen jednorázově.
Proudová přetížitelnost se udává velikostí neopakovatelného špičkového proudu IFSM
(surge), který závisí na době přetížení a na počáteční hodnotě. Pro přetížení trvající do
10 ms se přetížitelnost udává tzv. mezním přetěžovacím intervalem I2t. Přetěžovací proud
musí vyhovovat podmínce
tIdtIms
F2
10
0
2 <∫ .
Z údajů o proudové přetížitelnosti se vychází při návrhu jištění. U diod vznikají ztráty
průchodem propustného proudu, dále jsou na diodě ztráty spínací a ztráty vypínací. Výrobci
udávají ve svých katalozích grafické závislosti PF(AV)=f (IF(AV)) pro sinusový a obdélníkový
průběh diodou. Typický průběh je uveden na obr. 2.5. Jednotlivé křivky odpovídají různým
časovým intervalům vedení součástky. Je vidět, že ztráty od propustného proudu jsou
závislé na velikosti i tvaru proudu.
Setkáváme se s následujícími typy diod:
a) usměrňovací diody pro průmyslové kmitočty;
b) rychlé a tzv. kmitočtové diody (až tisíce Hz);
c) Schotkyho usměrňovací diody s nízkým propustným napětím UTO okolo 0.3 V.
Vyrábí se s blokovacím napětím jen do 100 V;
d) vysokonapěťové diody, které se vyznačují napěťovou přetížitelností URRM vyšší
než 1600 V.
TRANZISTORY
Ve výkonové elektronice se tranzistory používají jen jako spínače. Jejich zapnutí
a vypnutí je ovladatelné prostřednictvím hradla u unipolárních a bipolárních tranzistorů
s izolovaným hradlem nebo pomocí báze u bipolárních tranzistorů.
BIPOLÁRNÍ TRANZISTOR (BJT)
Jak již bylo v úvodu kapitoly 2 uvedeno, význam bipolárních tranzistorů ve
výkonových aplikacích velmi klesá. Pro spínací účely se používají obě varianty bipolárního
tranzistoru NPN i PNP. Pro tranzistor NPN platí, je-li při nulovém proudu báze IB přiloženo
mezi elektrody kolektror a emitor kladné napětí U
B
CE, zůstává také proud kolektoru IC nulový,
10
neboť kolektorový přechod je záporně polarizován. Jestliže se ale připojí mezi elektrody báze
– emitor kladné napětí UBE, dojde k propustné polarizaci emitorového přechodu, začne jím
procházet proud IBB, tím se zaplaví volnými nosiči náboje kolektorový přechod a tranzistorem
začne procházet kladný proud IC. Závislost vstupních veličin IB=f (UB BE) vyjadřuje vstupní
charakteristika tranzistoru a má podobný tvar jako propustná charakteristika diody, a tedy
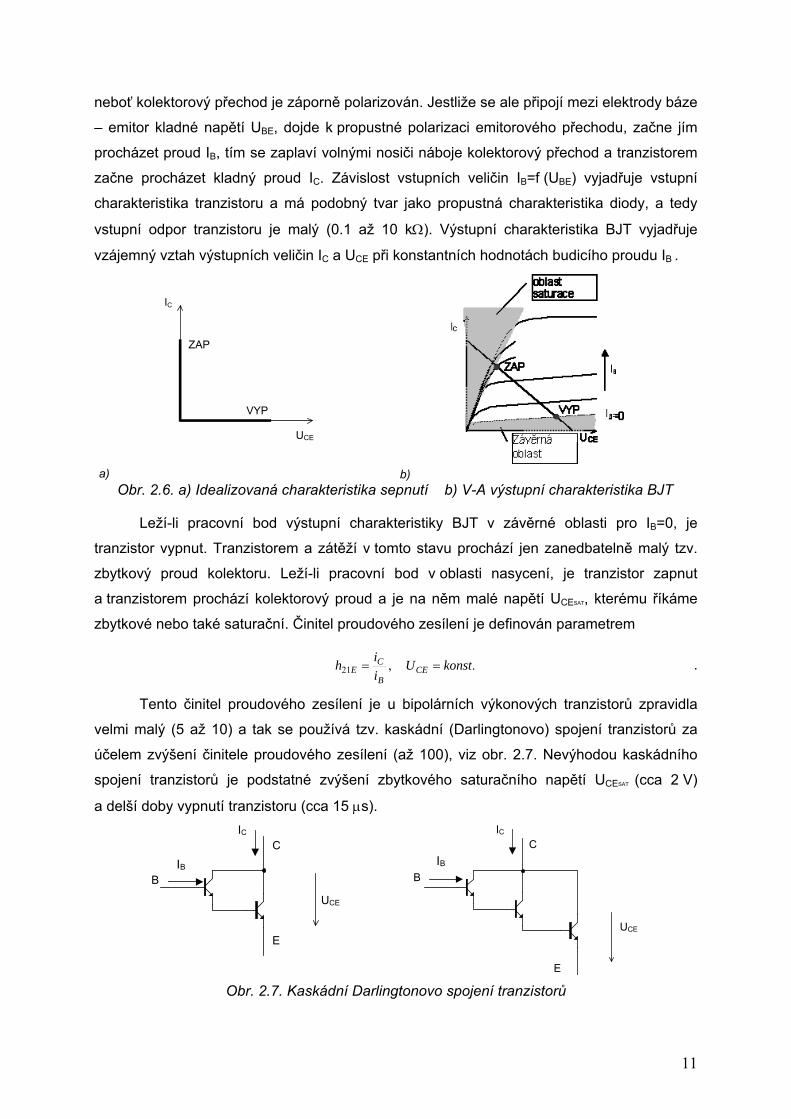
vstupní odpor tranzistoru je malý (0.1 až 10 kΩ). Výstupní charakteristika BJT vyjadřuje
vzájemný vztah výstupních veličin IC a UCE při konstantních hodnotách budicího proudu IB .
a)
b) Obr. 2.6. a) Idealizovaná charakteristika sepnutí b) V-A výstupní charakteristika BJT
UCE
iC
ZAP
VYP
IC
Leží-li pracovní bod výstupní charakteristiky BJT v závěrné oblasti pro IB=0, je
tranzistor vypnut. Tranzistorem a zátěží v tomto stavu prochází jen zanedbatelně malý tzv.
zbytkový proud kolektoru. Leží-li pracovní bod v oblasti nasycení, je tranzistor zapnut
a tranzistorem prochází kolektorový proud a je na něm malé napětí U
B
CESAT, kterému říkáme
zbytkové nebo také saturační. Činitel proudového zesílení je definován parametrem
.,21 konstUiih CEB
CE == .
Tento činitel proudového zesílení je u bipolárních výkonových tranzistorů zpravidla
velmi malý (5 až 10) a tak se používá tzv. kaskádní (Darlingtonovo) spojení tranzistorů za
účelem zvýšení činitele proudového zesílení (až 100), viz obr. 2.7. Nevýhodou kaskádního
spojení tranzistorů je podstatné zvýšení zbytkového saturačního napětí UCESAT (cca 2 V)
a delší doby vypnutí tranzistoru (cca 15 μs). IC
B
C
E
iB
UCE
IB
Obr. 2.7. Kaskádní Darlingtonovo spojení tranzistorů
IC
B
C
E
iB
UCE
IB
11
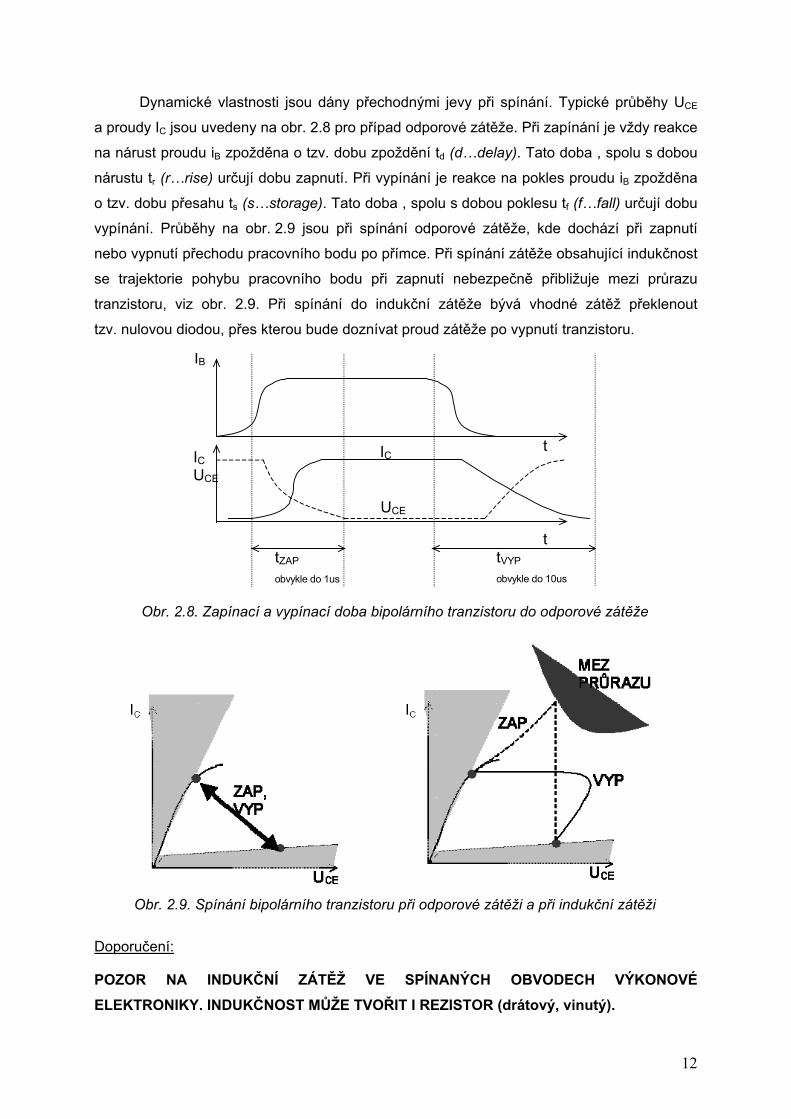
Dynamické vlastnosti jsou dány přechodnými jevy při spínání. Typické průběhy UCE
a proudy IC jsou uvedeny na obr. 2.8 pro případ odporové zátěže. Při zapínání je vždy reakce
na nárust proudu iB zpožděna o tzv. dobu zpoždění tB d (d…delay). Tato doba , spolu s dobou
nárustu tr (r…rise) určují dobu zapnutí. Při vypínání je reakce na pokles proudu iBB zpožděna
o tzv. dobu přesahu ts (s…storage). Tato doba , spolu s dobou poklesu tf (f…fall) určují dobu
vypínání. Průběhy na obr. 2.9 jsou při spínání odporové zátěže, kde dochází při zapnutí
nebo vypnutí přechodu pracovního bodu po přímce. Při spínání zátěže obsahující indukčnost
se trajektorie pohybu pracovního bodu při zapnutí nebezpečně přibližuje mezi průrazu
tranzistoru, viz obr. 2.9. Při spínání do indukční zátěže bývá vhodné zátěž překlenout
tzv. nulovou diodou, přes kterou bude doznívat proud zátěže po vypnutí tranzistoru.
t
IB
t IC
UCE
tZAP
obvykle do 1us tVYP
obvykle do 10us
IC UCE
Obr. 2.8. Zapínací a vypínací doba bipolárního tranzistoru do odporové zátěže
Obr. 2.9. Spínání bipolárního tranzistoru při odporové zátěži a při indukční zátěži
Doporučení:
POZOR NA INDUKČNÍ ZÁTĚŽ VE SPÍNANÝCH OBVODECH VÝKONOVÉ ELEKTRONIKY. INDUKČNOST MŮŽE TVOŘIT I REZISTOR (drátový, vinutý).
12
Napěťová přetížitelnost se udává největší přípustnou hodnotou UCEO. V současné
době jsou na trhu již bipolární tranzistory s hodnotami okolo 1200 V. Sériové řazení
tranzistorů se nedoporučuje. Proudová přetížitelnost je v katalozích běžně dána maximálním
přípustným trvalým proudem IC tranzistoru a dále se často udává tzv. špičková hodnota
proudu kolektoru ICM doplněna údajem tp (např. proud ICM po dobu 10 ms).
VÝKONOVÉ UNIPOLÁRNÍ TRANZISTORY
Unipolární tranzistory jsou často označovány názvem FET (Field Effect Tranzistor),
neboli tranzistor řízený polem. Elektrické pole je vytvářeno napětím přivedeným na řídicí
elektrodu G (gate). Unipolární tranzistor má další elektrody označováné S (source) a D
(drain). Unipolární tranzistory jsou děleny podle technologie výroby na dvě skupiny:
- tranzistory s přechodovým hradlem J FET (Junction FET);
- tranzistory s izolovaným hradlem IG FET (Insulated gate FET).
Tranzistory J FET se vyznačují velkým vstupním odporem (až 1012 Ω) a tedy
tranzistor je řiditelný již zanedbatelně malým proudem, respektive jen intenzitou elektrického
pole. J FET s kanálem P se z technologických důvodů neprosadil a je tedy používán
výhradně s kanálem N. Jako výkonové tranzistory však do průmyslu nepronikly. Více se
používají tranzistory IG FET nebo-li tzv. MOS FET (metal oxid semiconductors). S izolační
vrstvou hradla je možné dosáhnou vysokých vstupních odporů až 1015 Ω. Rozeznáváme dva
typy a to tranzistory MOS FET s indukovaným kanálem (obohacovací typ) a s vodivým
kanálem (ochuzovací typ). Výkonové tranzistory IG FET jsou vesměs obohacovacího typu.
Jednou z nejvýkonějších variant IG FET jsou tzv. HEX FET od firmy International Rectifier,
Dosažitelné maximální napětí mezi kolektorem a emitorem bývá až 1000 V a proud 200 A
(NE SOUČASNĚ). Mezní kmitočet bývá až do 10 MHz. V současné době patří MOS FET
mezi nejrozšířenější součástky v oblasti nízkých výkonů do jednotek kW.
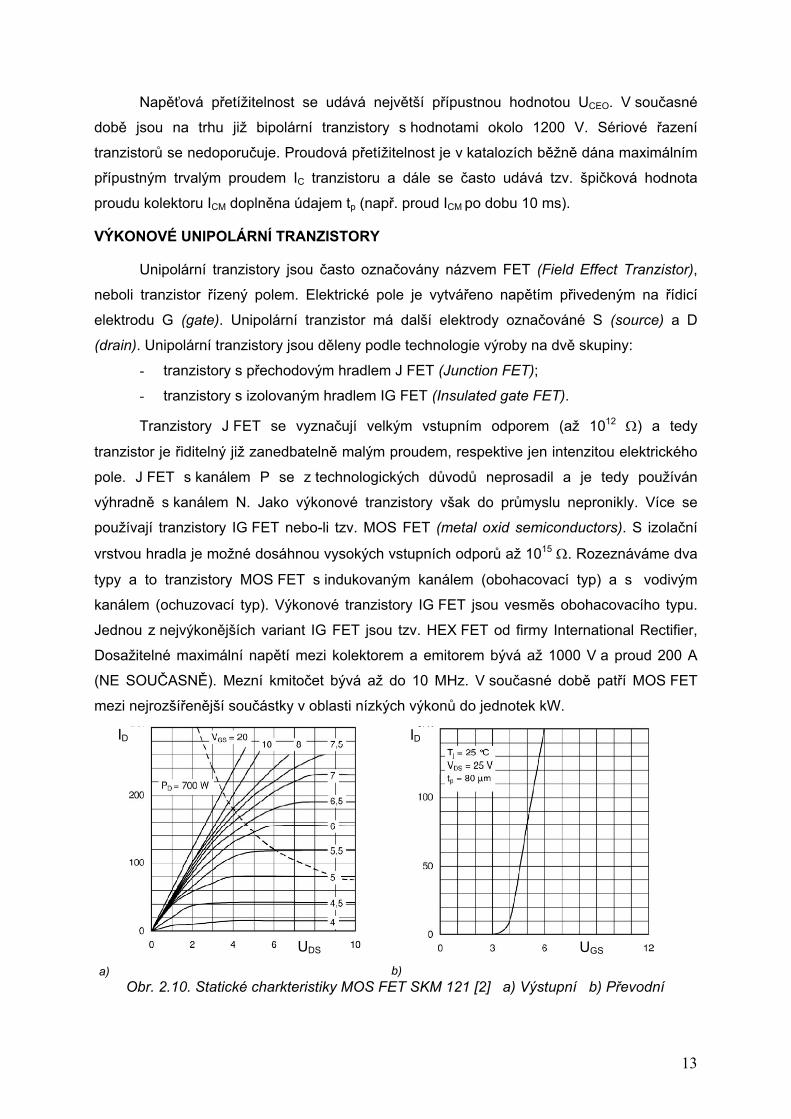
UDS
ID
UGS
ID
a) b) Obr. 2.10. Statické charkteristiky MOS FET SKM 121 [2] a) Výstupní b) Převodní
13
Princip spínání je založen na následujícím principu. Je-li napětí mezi elektrodou D a
S větší jak 0 a napětí mezi elektrodami G a S rovno 0, nemůže strukturou procházet proud,
neboť je mu v cestě závěrně polarizován PN přechod. Začne-li se postupně zvětšovat napětí
UGS do kladných hodnot, začínají se vytvářet vodivé kanály. Když dosáhne UGS tzv.
prahového napětí, které bývá 0.25 až 5 V, jsou tyto kanály ve stavu, který umožňuje průchod
proudu mezi elektrodami D a S. S dalším nárůstem napětí UGS se kanály rozšiřují a při
stejném napětí UDS umožňují průchod většího proudu. Na obr. 2.10 jsou uvedeny statické
VA charakteristiky MOS FET tranzitoru SKM 121 firmy SEMIKRON.
Napětí na sepnutém tranzistoru ovlivňuje parametr RDS(on), které vyjadřuje ekvivalentní
odpor v sepnutém stavu. U součástek na nižší napětí bývá tato hodnota 0.1 Ω a s nárůstem
napěťové zatížitelnosti se tato hodnota zvyšuje až na 1 Ω. Např. na odporu 1 Ω vzniká
průtokem proudu 5 A úbytek 5 V, nebo-li ztráta 25 W. Odpovídající bipolární tranzistor má
úbytek pouze asi 1 V, nebo-li ztrátu pouze 5 W!
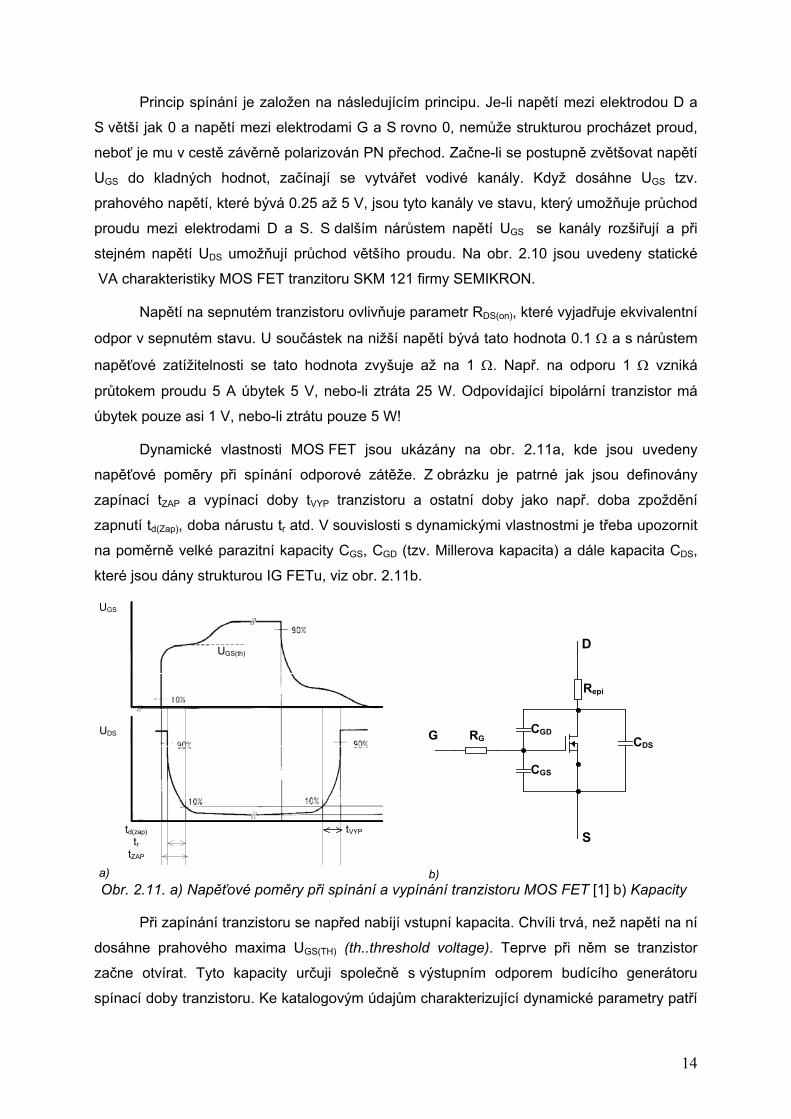
Dynamické vlastnosti MOS FET jsou ukázány na obr. 2.11a, kde jsou uvedeny
napěťové poměry při spínání odporové zátěže. Z obrázku je patrné jak jsou definovány
zapínací tZAP a vypínací doby tVYP tranzistoru a ostatní doby jako např. doba zpoždění
zapnutí td(Zap), doba nárustu tr atd. V souvislosti s dynamickými vlastnostmi je třeba upozornit
na poměrně velké parazitní kapacity CGS, CGD (tzv. Millerova kapacita) a dále kapacita CDS,
které jsou dány strukturou IG FETu, viz obr. 2.11b.
a)
b)
Obr. 2.11. a) Napěťové poměry při spínání a vypínání tranzistoru MOS FET [1] b) Kapacity
UGS
UDS
UGS(th)
td(zap) tr
tZAP
tVYP
C0
C1C2R1
R2
G
C
E
RG
Repi
CDS CGD
CGS
D
S
Při zapínání tranzistoru se napřed nabíjí vstupní kapacita. Chvíli trvá, než napětí na ní
dosáhne prahového maxima UGS(TH) (th..threshold voltage). Teprve při něm se tranzistor
začne otvírat. Tyto kapacity určuji společně s výstupním odporem budícího generátoru
spínací doby tranzistoru. Ke katalogovým údajům charakterizující dynamické parametry patří
14
vstupní kapacita tranzistoru Ciss a dále jsou uváděny běžně grafické závislosti jednotlivých
kapacit na napětí UDS. Všechny tři kapacity jsou teplotně nezávislé a spínací vlastnosti
výkonových MOS FET právě ovlivňuje napěťová závislost. V praxi se výkonový MOS FET
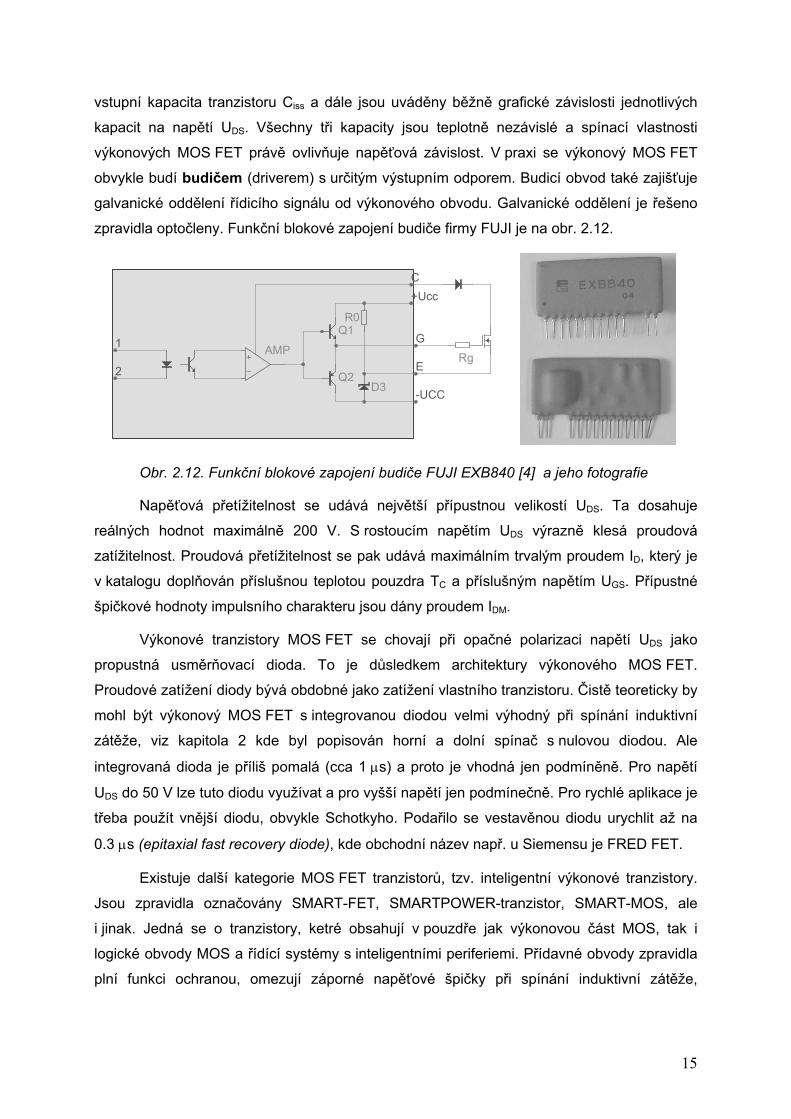
obvykle budí budičem (driverem) s určitým výstupním odporem. Budicí obvod také zajišťuje
galvanické oddělení řídicího signálu od výkonového obvodu. Galvanické oddělení je řešeno
zpravidla optočleny. Funkční blokové zapojení budiče firmy FUJI je na obr. 2.12.
AMP
Q1
Q2
R0
D3
Rg2
1
C
G
+Ucc
E
-UCC
Obr. 2.12. Funkční blokové zapojení budiče FUJI EXB840 [4] a jeho fotografie
Napěťová přetížitelnost se udává největší přípustnou velikostí UDS. Ta dosahuje
reálných hodnot maximálně 200 V. S rostoucím napětím UDS výrazně klesá proudová
zatížitelnost. Proudová přetížitelnost se pak udává maximálním trvalým proudem ID, který je
v katalogu doplňován příslušnou teplotou pouzdra TC a příslušným napětím UGS. Přípustné
špičkové hodnoty impulsního charakteru jsou dány proudem IDM.
Výkonové tranzistory MOS FET se chovají při opačné polarizaci napětí UDS jako
propustná usměrňovací dioda. To je důsledkem architektury výkonového MOS FET.
Proudové zatížení diody bývá obdobné jako zatížení vlastního tranzistoru. Čistě teoreticky by
mohl být výkonový MOS FET s integrovanou diodou velmi výhodný při spínání induktivní
zátěže, viz kapitola 2 kde byl popisován horní a dolní spínač s nulovou diodou. Ale
integrovaná dioda je příliš pomalá (cca 1 μs) a proto je vhodná jen podmíněně. Pro napětí
UDS do 50 V lze tuto diodu využívat a pro vyšší napětí jen podmínečně. Pro rychlé aplikace je
třeba použít vnější diodu, obvykle Schotkyho. Podařilo se vestavěnou diodu urychlit až na
0.3 μs (epitaxial fast recovery diode), kde obchodní název např. u Siemensu je FRED FET.
Existuje další kategorie MOS FET tranzistorů, tzv. inteligentní výkonové tranzistory.
Jsou zpravidla označovány SMART-FET, SMARTPOWER-tranzistor, SMART-MOS, ale
i jinak. Jedná se o tranzistory, ketré obsahují v pouzdře jak výkonovou část MOS, tak i
logické obvody MOS a řídící systémy s inteligentními periferiemi. Přídavné obvody zpravidla
plní funkci ochranou, omezují záporné napěťové špičky při spínání induktivní zátěže,
15
ochranu vstupů proti poškození elektrostaickým nábojem, kompatibilitu vstupů s logickými
obvody CMOS a TTL a zpětné hlášení stavů.
Dále existují výkonové tranzistory opatřený snímačem proudu za účelem ochrany
proti proudovému přetížení. Takové tranzistory jsou označovány SENSFET (Motorola),
HEXSENS (International Rectifiers) nebo MirrorFET (IXYS). Při použití čidla proudu je
možné přímo na čipu realizovat ochranu proti proudovému přetížení.
Zopakujme, že velkou předností IG FET je vysoká vstupní impedance, vysoké
výkonové zesílení, dobré kmitočtové vlastnosti, napěťové řízení a ve srovnání s bipolárními
tranzistory také vysoká teplotní stabilita i při velkých proudech. Další nespornou výhodou
jsou i malé řídící výkony. Nevýhodou je větší zbytkové napětí. Další nevýhodou součástek
MOS FET je, že hradlo je vytvořeno na tenké vrstvě izolantu a tranzistory jsou citlivé vůči
elektrostatickému náboji. Napětí UGS nesmi překročit maximální hodnotu danou výrobcem,
nebo hrozí že dojde k průrazu vrstvy izolujicí hradlo a dráha G-S a nebo G-D budou více
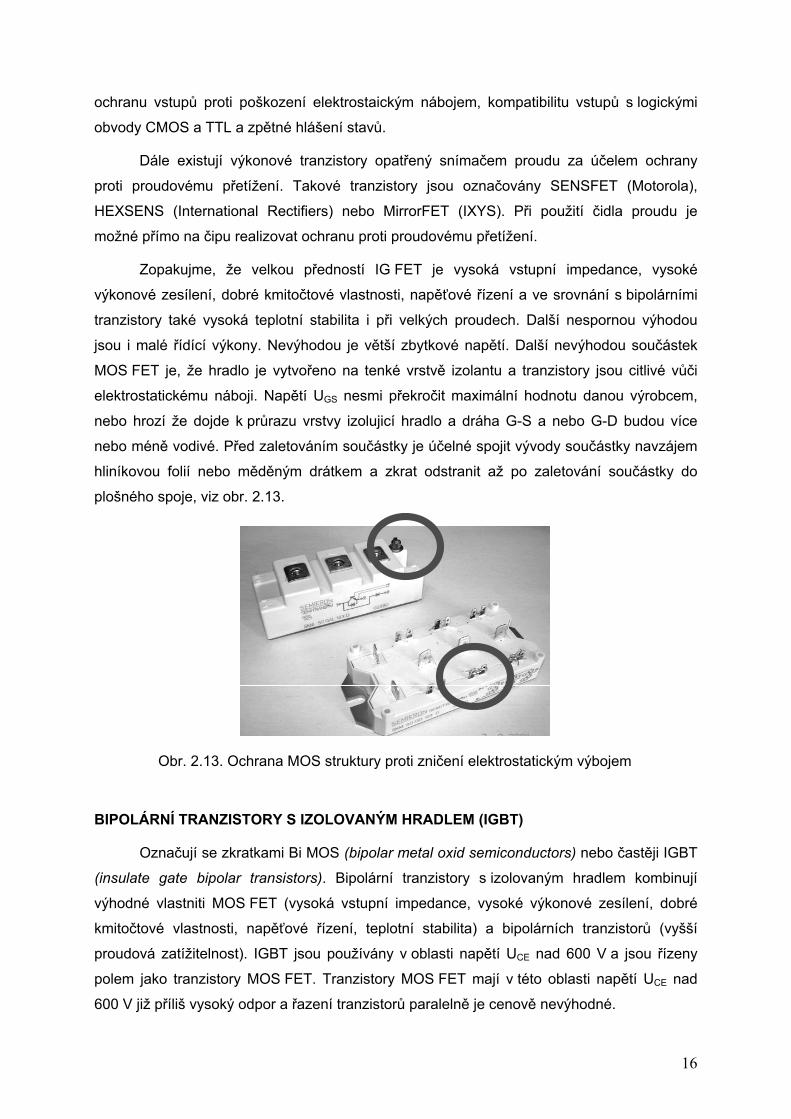
nebo méně vodivé. Před zaletováním součástky je účelné spojit vývody součástky navzájem
hliníkovou folií nebo měděným drátkem a zkrat odstranit až po zaletování součástky do
plošného spoje, viz obr. 2.13.
Obr. 2.13. Ochrana MOS struktury proti zničení elektrostatickým výbojem
BIPOLÁRNÍ TRANZISTORY S IZOLOVANÝM HRADLEM (IGBT)
Označují se zkratkami Bi MOS (bipolar metal oxid semiconductors) nebo častěji IGBT
(insulate gate bipolar transistors). Bipolární tranzistory s izolovaným hradlem kombinují
výhodné vlastniti MOS FET (vysoká vstupní impedance, vysoké výkonové zesílení, dobré
kmitočtové vlastnosti, napěťové řízení, teplotní stabilita) a bipolárních tranzistorů (vyšší
proudová zatížitelnost). IGBT jsou používány v oblasti napětí UCE nad 600 V a jsou řízeny
polem jako tranzistory MOS FET. Tranzistory MOS FET mají v této oblasti napětí UCE nad
600 V již příliš vysoký odpor a řazení tranzistorů paralelně je cenově nevýhodné.
16
Jsou používány dvě struktury NPT IGBT (non punch through) a PT IGBT (punch
through). Hlavní rozdíly mezi NPT IGBT a PT IGBT jsou v teplotní závislosti energetických
ztrát při vypínání a v propustném stavu. U PT IGBT ztráty při vypínání s teplotou rostou a
v propustném stavu klesají. U NPT IGBT sice ztráty v propustném stavu s teplotou rostou,
ale při vypínání zůstávají téměř stálé. Dnes jsou laboratorně připraveny součástky až
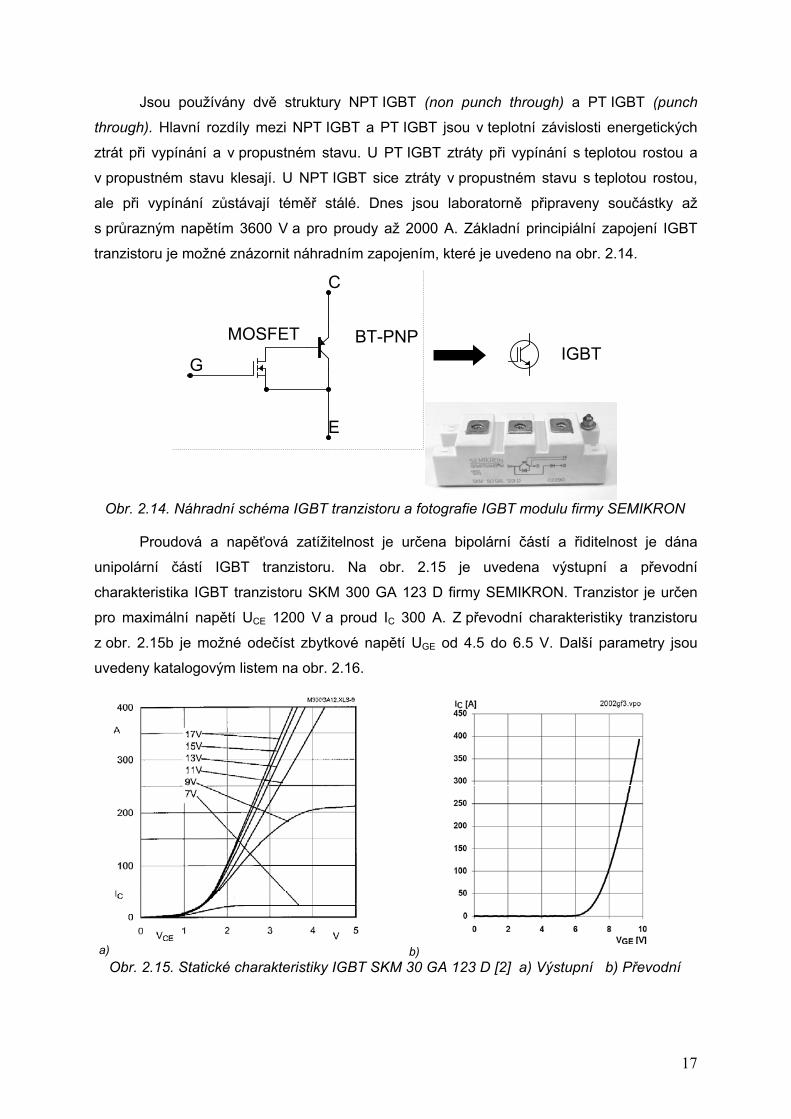
s průrazným napětím 3600 V a pro proudy až 2000 A. Základní principiální zapojení IGBT
tranzistoru je možné znázornit náhradním zapojením, které je uvedeno na obr. 2.14.
MOSFET BT-PNPIGBT
E
C
G
Obr. 2.14. Náhradní schéma IGBT tranzistoru a fotografie IGBT modulu firmy SEMIKRON
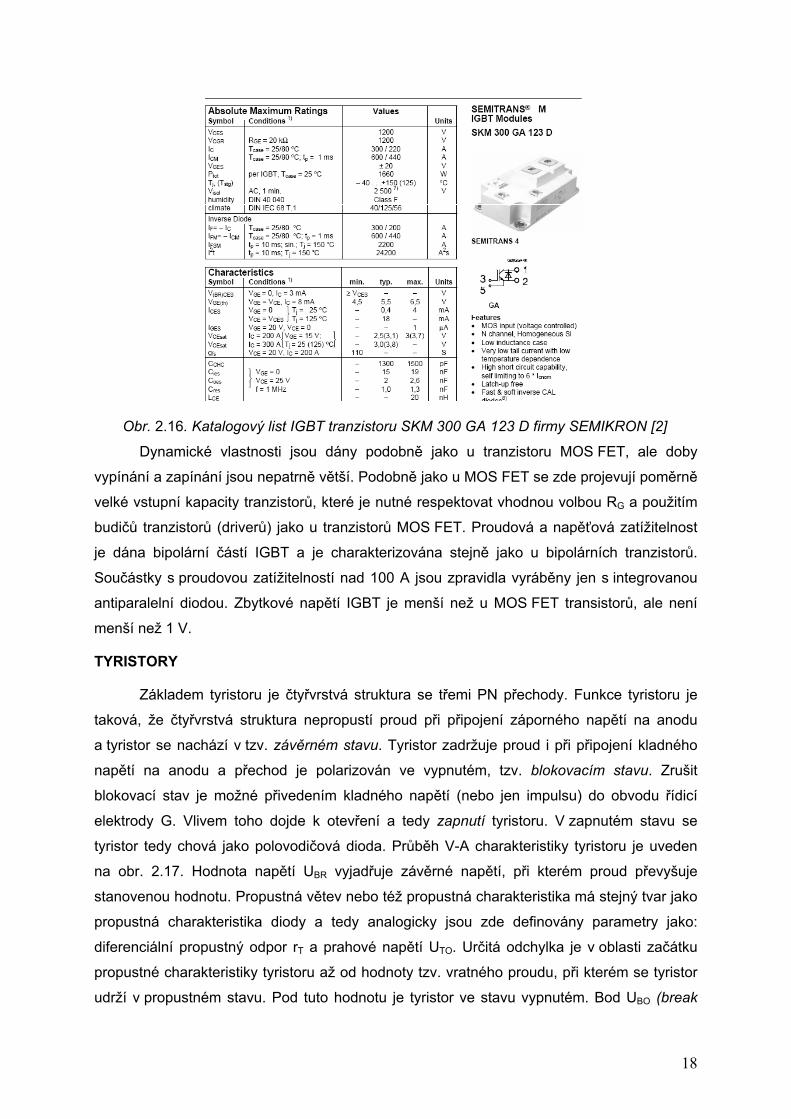
Proudová a napěťová zatížitelnost je určena bipolární částí a řiditelnost je dána
unipolární částí IGBT tranzistoru. Na obr. 2.15 je uvedena výstupní a převodní
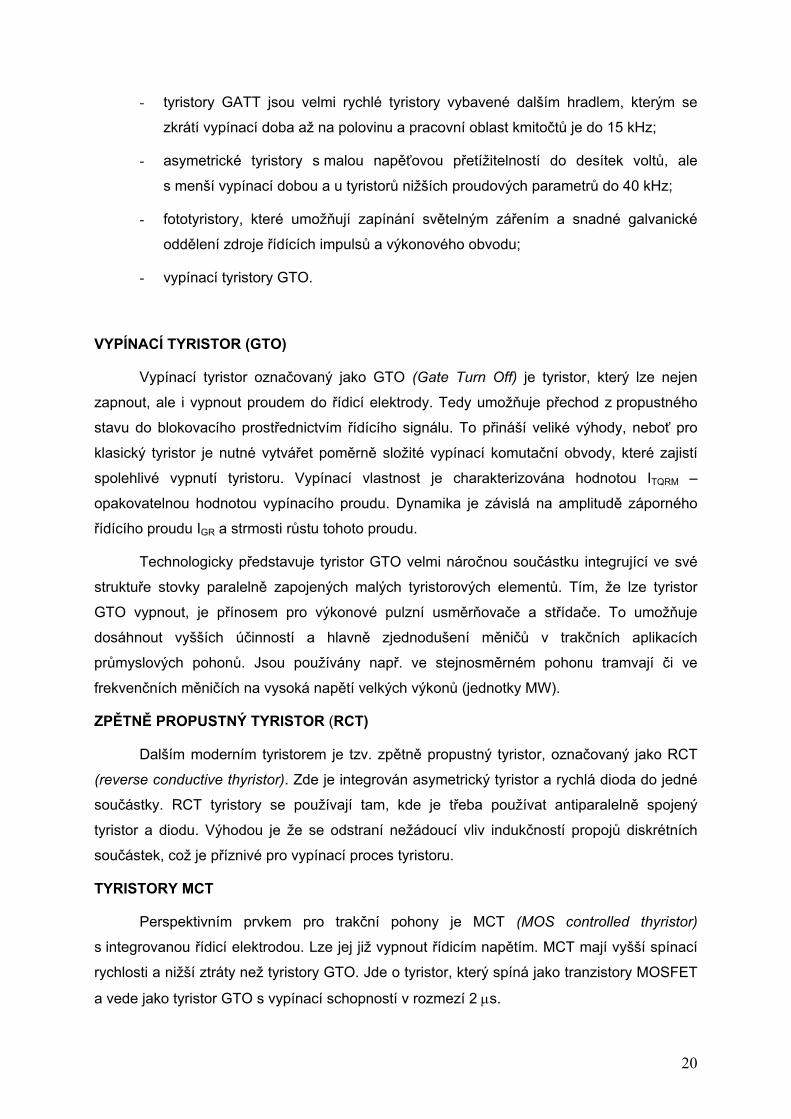
charakteristika IGBT tranzistoru SKM 300 GA 123 D firmy SEMIKRON. Tranzistor je určen
pro maximální napětí UCE 1200 V a proud IC 300 A. Z převodní charakteristiky tranzistoru
z obr. 2.15b je možné odečíst zbytkové napětí UGE od 4.5 do 6.5 V. Další parametry jsou
uvedeny katalogovým listem na obr. 2.16.
a) b) Obr. 2.15. Statické charakteristiky IGBT SKM 30 GA 123 D [2] a) Výstupní b) Převodní
17
Obr. 2.16. Katalogový list IGBT tranzistoru SKM 300 GA 123 D firmy SEMIKRON [2]
Dynamické vlastnosti jsou dány podobně jako u tranzistoru MOS FET, ale doby
vypínání a zapínání jsou nepatrně větší. Podobně jako u MOS FET se zde projevují poměrně
velké vstupní kapacity tranzistorů, které je nutné respektovat vhodnou volbou RG a použitím
budičů tranzistorů (driverů) jako u tranzistorů MOS FET. Proudová a napěťová zatížitelnost
je dána bipolární částí IGBT a je charakterizována stejně jako u bipolárních tranzistorů.
Součástky s proudovou zatížitelností nad 100 A jsou zpravidla vyráběny jen s integrovanou
antiparalelní diodou. Zbytkové napětí IGBT je menší než u MOS FET transistorů, ale není
menší než 1 V.
TYRISTORY
Základem tyristoru je čtyřvrstvá struktura se třemi PN přechody. Funkce tyristoru je
taková, že čtyřvrstvá struktura nepropustí proud při připojení záporného napětí na anodu
a tyristor se nachází v tzv. závěrném stavu. Tyristor zadržuje proud i při připojení kladného
napětí na anodu a přechod je polarizován ve vypnutém, tzv. blokovacím stavu. Zrušit
blokovací stav je možné přivedením kladného napětí (nebo jen impulsu) do obvodu řídicí
elektrody G. Vlivem toho dojde k otevření a tedy zapnutí tyristoru. V zapnutém stavu se
tyristor tedy chová jako polovodičová dioda. Průběh V-A charakteristiky tyristoru je uveden
na obr. 2.17. Hodnota napětí UBR vyjadřuje závěrné napětí, při kterém proud převyšuje
stanovenou hodnotu. Propustná větev nebo též propustná charakteristika má stejný tvar jako
propustná charakteristika diody a tedy analogicky jsou zde definovány parametry jako:
diferenciální propustný odpor rT a prahové napětí UTO. Určitá odchylka je v oblasti začátku
propustné charakteristiky tyristoru až od hodnoty tzv. vratného proudu, při kterém se tyristor
udrží v propustném stavu. Pod tuto hodnotu je tyristor ve stavu vypnutém. Bod UBO (break
18
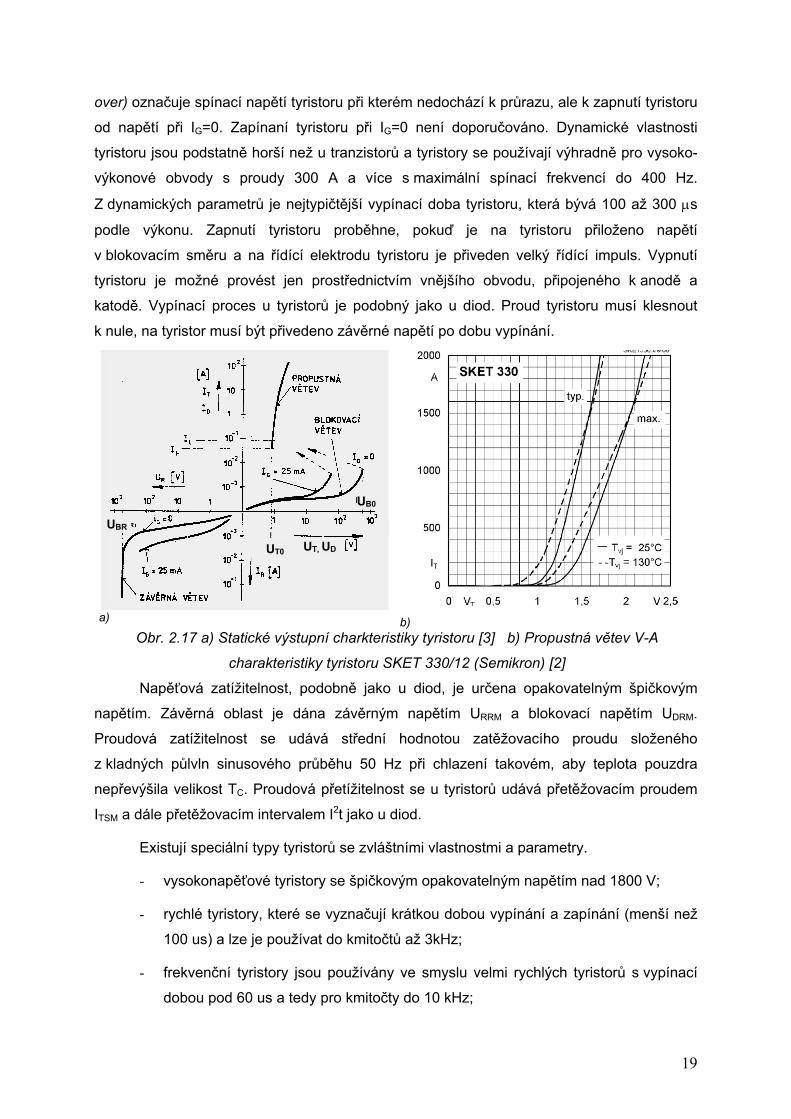
over) označuje spínací napětí tyristoru při kterém nedochází k průrazu, ale k zapnutí tyristoru
od napětí při IG=0. Zapínaní tyristoru při IG=0 není doporučováno. Dynamické vlastnosti
tyristoru jsou podstatně horší než u tranzistorů a tyristory se používají výhradně pro vysoko-
výkonové obvody s proudy 300 A a více s maximální spínací frekvencí do 400 Hz.
Z dynamických parametrů je nejtypičtější vypínací doba tyristoru, která bývá 100 až 300 μs
podle výkonu. Zapnutí tyristoru proběhne, pokuď je na tyristoru přiloženo napětí
v blokovacím směru a na řídící elektrodu tyristoru je přiveden velký řídící impuls. Vypnutí
tyristoru je možné provést jen prostřednictvím vnějšího obvodu, připojeného k anodě a
katodě. Vypínací proces u tyristorů je podobný jako u diod. Proud tyristoru musí klesnout
k nule, na tyristor musí být přivedeno závěrné napětí po dobu vypínání.
UB0
UT0 UBR
UT, UD
a) b) Obr. 2.17 a) Statické výstupní charkteristiky tyristoru [3] b) Propustná větev V-A
charakteristiky tyristoru SKET 330/12 (Semikron) [2]
Napěťová zatížitelnost, podobně jako u diod, je určena opakovatelným špičkovým
napětím. Závěrná oblast je dána závěrným napětím URRM a blokovací napětím UDRM.
Proudová zatížitelnost se udává střední hodnotou zatěžovacího proudu složeného
z kladných půlvln sinusového průběhu 50 Hz při chlazení takovém, aby teplota pouzdra
nepřevýšila velikost TC. Proudová přetížitelnost se u tyristorů udává přetěžovacím proudem
ITSM a dále přetěžovacím intervalem I2t jako u diod.
Existují speciální typy tyristorů se zvláštními vlastnostmi a parametry.
- vysokonapěťové tyristory se špičkovým opakovatelným napětím nad 1800 V;
- rychlé tyristory, které se vyznačují krátkou dobou vypínání a zapínání (menší než
100 us) a lze je používat do kmitočtů až 3kHz;
- frekvenční tyristory jsou používány ve smyslu velmi rychlých tyristorů s vypínací
dobou pod 60 us a tedy pro kmitočty do 10 kHz;
19
- tyristory GATT jsou velmi rychlé tyristory vybavené dalším hradlem, kterým se
zkrátí vypínací doba až na polovinu a pracovní oblast kmitočtů je do 15 kHz;
- asymetrické tyristory s malou napěťovou přetížitelností do desítek voltů, ale
s menší vypínací dobou a u tyristorů nižších proudových parametrů do 40 kHz;
- fototyristory, které umožňují zapínání světelným zářením a snadné galvanické
oddělení zdroje řídících impulsů a výkonového obvodu;
- vypínací tyristory GTO.
VYPÍNACÍ TYRISTOR (GTO)
Vypínací tyristor označovaný jako GTO (Gate Turn Off) je tyristor, který lze nejen
zapnout, ale i vypnout proudem do řídicí elektrody. Tedy umožňuje přechod z propustného
stavu do blokovacího prostřednictvím řídícího signálu. To přináší veliké výhody, neboť pro
klasický tyristor je nutné vytvářet poměrně složité vypínací komutační obvody, které zajistí
spolehlivé vypnutí tyristoru. Vypínací vlastnost je charakterizována hodnotou ITQRM –
opakovatelnou hodnotou vypínacího proudu. Dynamika je závislá na amplitudě záporného
řídícího proudu IGR a strmosti růstu tohoto proudu.
Technologicky představuje tyristor GTO velmi náročnou součástku integrující ve své
struktuře stovky paralelně zapojených malých tyristorových elementů. Tím, že lze tyristor
GTO vypnout, je přínosem pro výkonové pulzní usměrňovače a střídače. To umožňuje
dosáhnout vyšších účinností a hlavně zjednodušení měničů v trakčních aplikacích
průmyslových pohonů. Jsou používány např. ve stejnosměrném pohonu tramvají či ve
frekvenčních měničích na vysoká napětí velkých výkonů (jednotky MW).
ZPĚTNĚ PROPUSTNÝ TYRISTOR (RCT)
Dalším moderním tyristorem je tzv. zpětně propustný tyristor, označovaný jako RCT
(reverse conductive thyristor). Zde je integrován asymetrický tyristor a rychlá dioda do jedné
součástky. RCT tyristory se používají tam, kde je třeba používat antiparalelně spojený
tyristor a diodu. Výhodou je že se odstraní nežádoucí vliv indukčností propojů diskrétních
součástek, což je příznivé pro vypínací proces tyristoru.
TYRISTORY MCT
Perspektivním prvkem pro trakční pohony je MCT (MOS controlled thyristor)
s integrovanou řídicí elektrodou. Lze jej již vypnout řídicím napětím. MCT mají vyšší spínací
rychlosti a nižší ztráty než tyristory GTO. Jde o tyristor, který spíná jako tranzistory MOSFET
a vede jako tyristor GTO s vypínací schopností v rozmezí 2 μs.
20
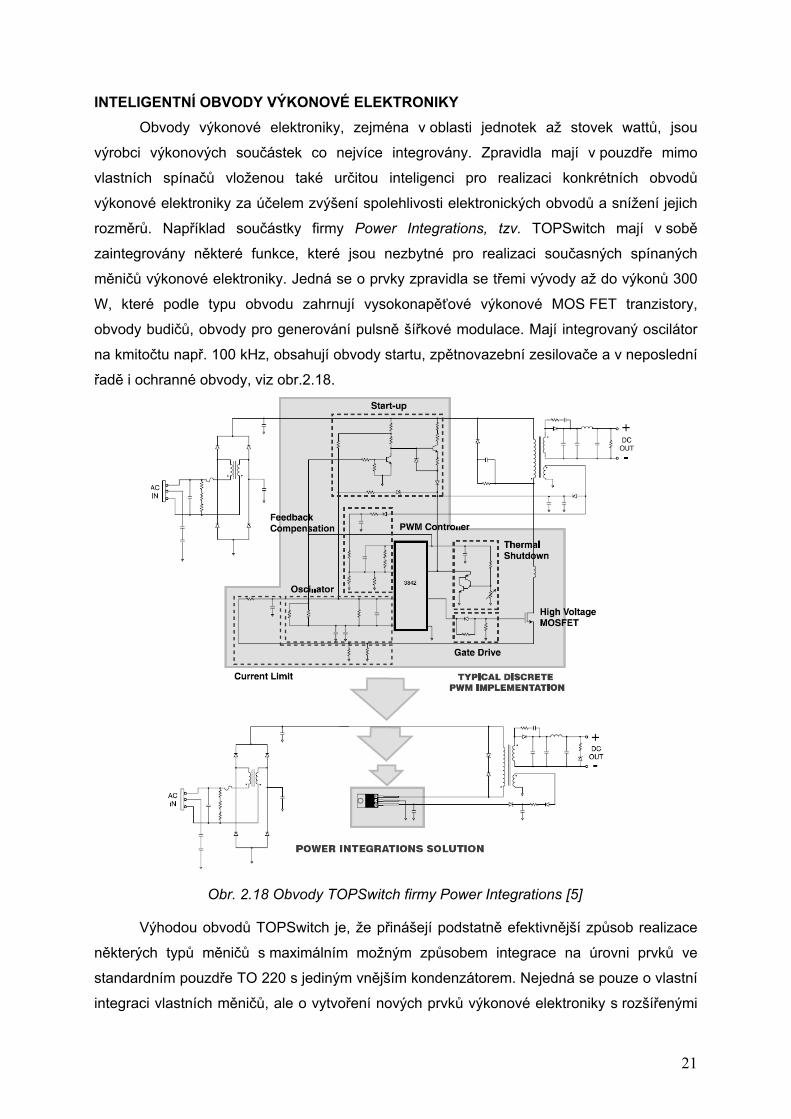
INTELIGENTNÍ OBVODY VÝKONOVÉ ELEKTRONIKY Obvody výkonové elektroniky, zejména v oblasti jednotek až stovek wattů, jsou
výrobci výkonových součástek co nejvíce integrovány. Zpravidla mají v pouzdře mimo
vlastních spínačů vloženou také určitou inteligenci pro realizaci konkrétních obvodů
výkonové elektroniky za účelem zvýšení spolehlivosti elektronických obvodů a snížení jejich
rozměrů. Například součástky firmy Power Integrations, tzv. TOPSwitch mají v sobě
zaintegrovány některé funkce, které jsou nezbytné pro realizaci současných spínaných
měničů výkonové elektroniky. Jedná se o prvky zpravidla se třemi vývody až do výkonů 300
W, které podle typu obvodu zahrnují vysokonapěťové výkonové MOS FET tranzistory,
obvody budičů, obvody pro generování pulsně šířkové modulace. Mají integrovaný oscilátor
na kmitočtu např. 100 kHz, obsahují obvody startu, zpětnovazební zesilovače a v neposlední
řadě i ochranné obvody, viz obr.2.18.
Obr. 2.18 Obvody TOPSwitch firmy Power Integrations [5]
Výhodou obvodů TOPSwitch je, že přinášejí podstatně efektivnější způsob realizace
některých typů měničů s maximálním možným způsobem integrace na úrovni prvků ve
standardním pouzdře TO 220 s jediným vnějším kondenzátorem. Nejedná se pouze o vlastní
integraci vlastních měničů, ale o vytvoření nových prvků výkonové elektroniky s rozšířenými
21
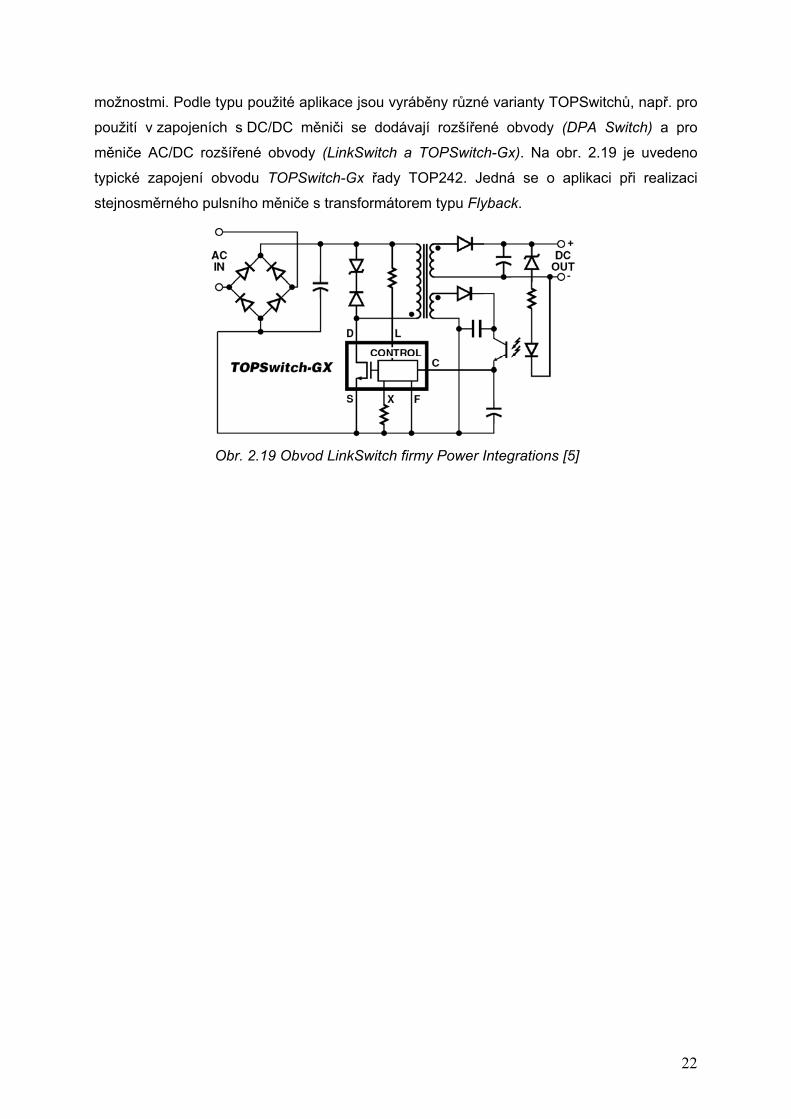
možnostmi. Podle typu použité aplikace jsou vyráběny různé varianty TOPSwitchů, např. pro
použití v zapojeních s DC/DC měniči se dodávají rozšířené obvody (DPA Switch) a pro
měniče AC/DC rozšířené obvody (LinkSwitch a TOPSwitch-Gx). Na obr. 2.19 je uvedeno
typické zapojení obvodu TOPSwitch-Gx řady TOP242. Jedná se o aplikaci při realizaci
stejnosměrného pulsního měniče s transformátorem typu Flyback.
Obr. 2.19 Obvod LinkSwitch firmy Power Integrations [5]
22
3. Obvody výkonové elektroniky
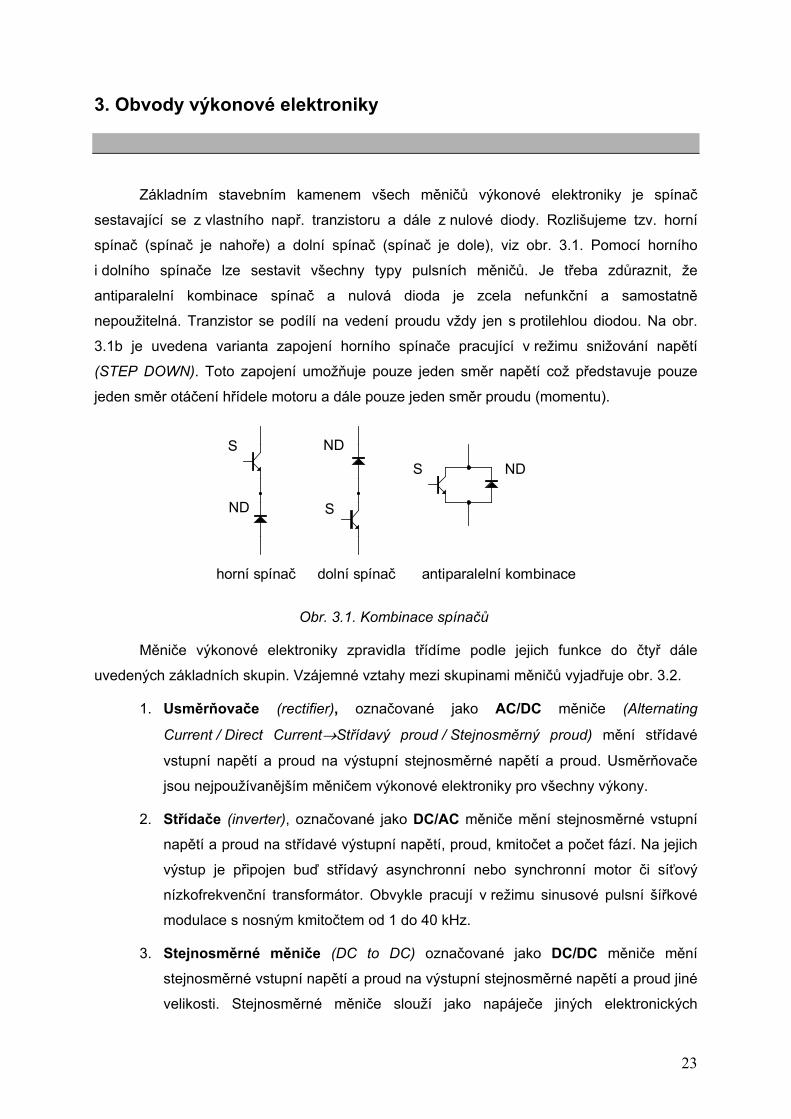
Základním stavebním kamenem všech měničů výkonové elektroniky je spínač
sestavající se z vlastního např. tranzistoru a dále z nulové diody. Rozlišujeme tzv. horní
spínač (spínač je nahoře) a dolní spínač (spínač je dole), viz obr. 3.1. Pomocí horního
i dolního spínače lze sestavit všechny typy pulsních měničů. Je třeba zdůraznit, že
antiparalelní kombinace spínač a nulová dioda je zcela nefunkční a samostatně
nepoužitelná. Tranzistor se podílí na vedení proudu vždy jen s protilehlou diodou. Na obr.
3.1b je uvedena varianta zapojení horního spínače pracující v režimu snižování napětí
(STEP DOWN). Toto zapojení umožňuje pouze jeden směr napětí což představuje pouze
jeden směr otáčení hřídele motoru a dále pouze jeden směr proudu (momentu).
S NDS
ND S
ND
horní spínač dolní spínač antiparalelní kombinace
Obr. 3.1. Kombinace spínačů
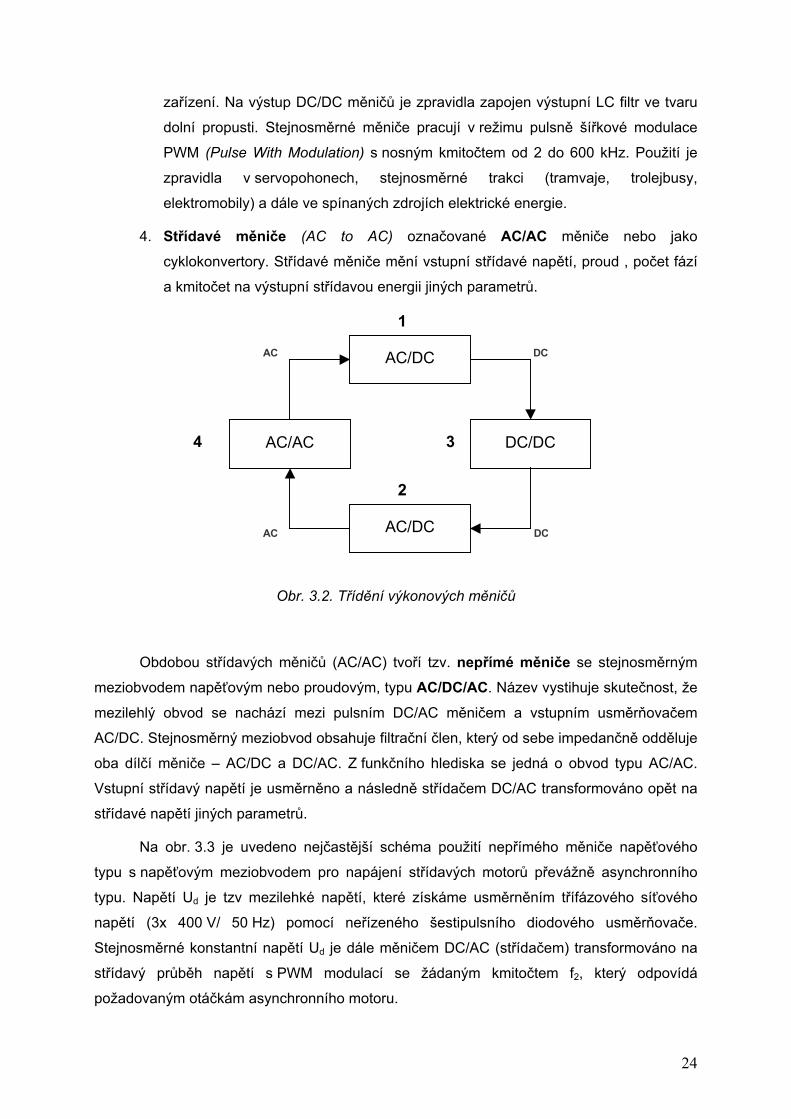
Měniče výkonové elektroniky zpravidla třídíme podle jejich funkce do čtyř dále
uvedených základních skupin. Vzájemné vztahy mezi skupinami měničů vyjadřuje obr. 3.2.
1. Usměrňovače (rectifier), označované jako AC/DC měniče (Alternating
Current / Direct Current→Střídavý proud / Stejnosměrný proud) mění střídavé
vstupní napětí a proud na výstupní stejnosměrné napětí a proud. Usměrňovače
jsou nejpoužívanějším měničem výkonové elektroniky pro všechny výkony.
2. Střídače (inverter), označované jako DC/AC měniče mění stejnosměrné vstupní
napětí a proud na střídavé výstupní napětí, proud, kmitočet a počet fází. Na jejich
výstup je připojen buď střídavý asynchronní nebo synchronní motor či síťový
nízkofrekvenční transformátor. Obvykle pracují v režimu sinusové pulsní šířkové
modulace s nosným kmitočtem od 1 do 40 kHz.
3. Stejnosměrné měniče (DC to DC) označované jako DC/DC měniče mění
stejnosměrné vstupní napětí a proud na výstupní stejnosměrné napětí a proud jiné
velikosti. Stejnosměrné měniče slouží jako napáječe jiných elektronických
23
zařízení. Na výstup DC/DC měničů je zpravidla zapojen výstupní LC filtr ve tvaru
dolní propusti. Stejnosměrné měniče pracují v režimu pulsně šířkové modulace
PWM (Pulse With Modulation) s nosným kmitočtem od 2 do 600 kHz. Použití je
zpravidla v servopohonech, stejnosměrné trakci (tramvaje, trolejbusy,
elektromobily) a dále ve spínaných zdrojích elektrické energie.
4. Střídavé měniče (AC to AC) označované AC/AC měniče nebo jako
cyklokonvertory. Střídavé měniče mění vstupní střídavé napětí, proud , počet fází
a kmitočet na výstupní střídavou energii jiných parametrů.
AC/DC DC
DC/DC
AC/DC
AC/AC
AC DC
AC
1
2
3 4
Obr. 3.2. Třídění výkonových měničů
Obdobou střídavých měničů (AC/AC) tvoří tzv. nepřímé měniče se stejnosměrným
meziobvodem napěťovým nebo proudovým, typu AC/DC/AC. Název vystihuje skutečnost, že
mezilehlý obvod se nachází mezi pulsním DC/AC měničem a vstupním usměrňovačem
AC/DC. Stejnosměrný meziobvod obsahuje filtrační člen, který od sebe impedančně odděluje
oba dílčí měniče – AC/DC a DC/AC. Z funkčního hlediska se jedná o obvod typu AC/AC.
Vstupní střídavý napětí je usměrněno a následně střídačem DC/AC transformováno opět na
střídavé napětí jiných parametrů.
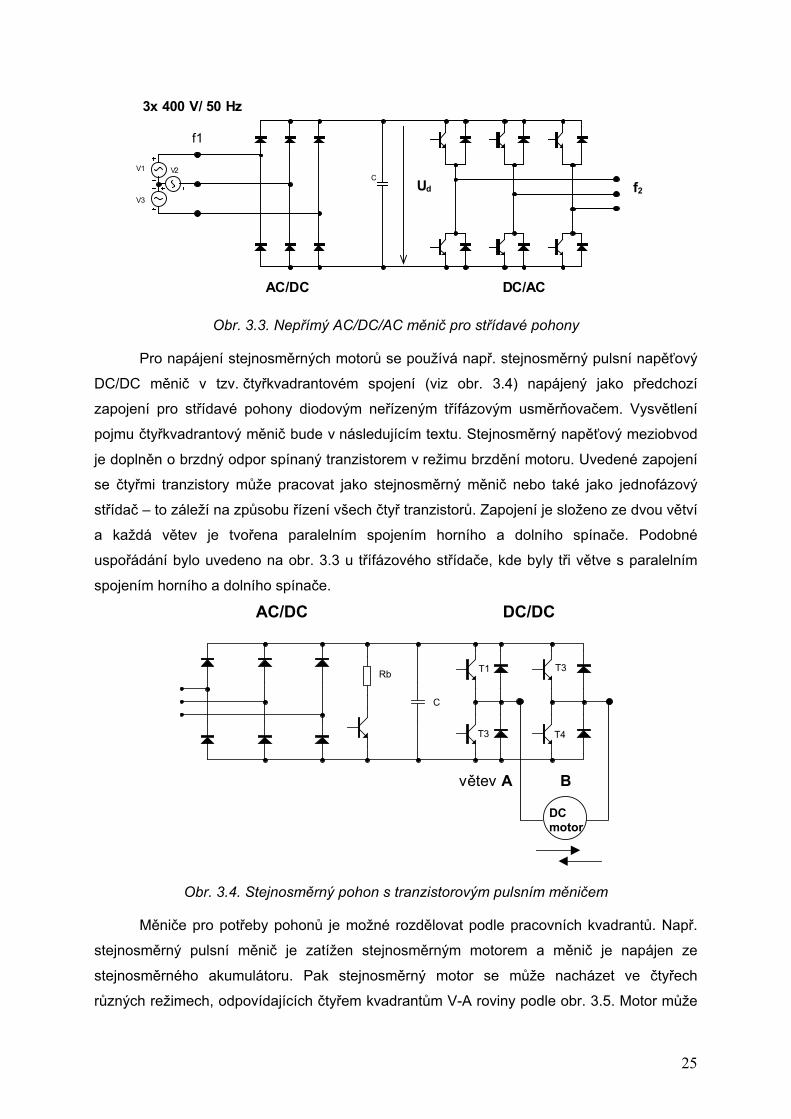
Na obr. 3.3 je uvedeno nejčastější schéma použití nepřímého měniče napěťového
typu s napěťovým meziobvodem pro napájení střídavých motorů převážně asynchronního
typu. Napětí Ud je tzv mezilehké napětí, které získáme usměrněním třífázového síťového
napětí (3x 400 V/ 50 Hz) pomocí neřízeného šestipulsního diodového usměrňovače.
Stejnosměrné konstantní napětí Ud je dále měničem DC/AC (střídačem) transformováno na
střídavý průběh napětí s PWM modulací se žádaným kmitočtem f2, který odpovídá
požadovaným otáčkám asynchronního motoru.
24
CV1 V2
V3
f1
f2
3x 400 V/ 50 Hz
AC/DC DC/AC
f2 Ud
Obr. 3.3. Nepřímý AC/DC/AC měnič pro střídavé pohony
Pro napájení stejnosměrných motorů se používá např. stejnosměrný pulsní napěťový
DC/DC měnič v tzv. čtyřkvadrantovém spojení (viz obr. 3.4) napájený jako předchozí
zapojení pro střídavé pohony diodovým neřízeným třífázovým usměrňovačem. Vysvětlení
pojmu čtyřkvadrantový měnič bude v následujícím textu. Stejnosměrný napěťový meziobvod
je doplněn o brzdný odpor spínaný tranzistorem v režimu brzdění motoru. Uvedené zapojení
se čtyřmi tranzistory může pracovat jako stejnosměrný měnič nebo také jako jednofázový
střídač – to záleží na způsobu řízení všech čtyř tranzistorů. Zapojení je složeno ze dvou větví
a každá větev je tvořena paralelním spojením horního a dolního spínače. Podobné
uspořádání bylo uvedeno na obr. 3.3 u třífázového střídače, kde byly tři větve s paralelním
spojením horního a dolního spínače.
Rb
C
T1 T3
T3 T4
DC motor
AC/DC
DC/DC
větev A B
Obr. 3.4. Stejnosměrný pohon s tranzistorovým pulsním měničem
Měniče pro potřeby pohonů je možné rozdělovat podle pracovních kvadrantů. Např.
stejnosměrný pulsní měnič je zatížen stejnosměrným motorem a měnič je napájen ze
stejnosměrného akumulátoru. Pak stejnosměrný motor se může nacházet ve čtyřech
různých režimech, odpovídajících čtyřem kvadrantům V-A roviny podle obr. 3.5. Motor může
25
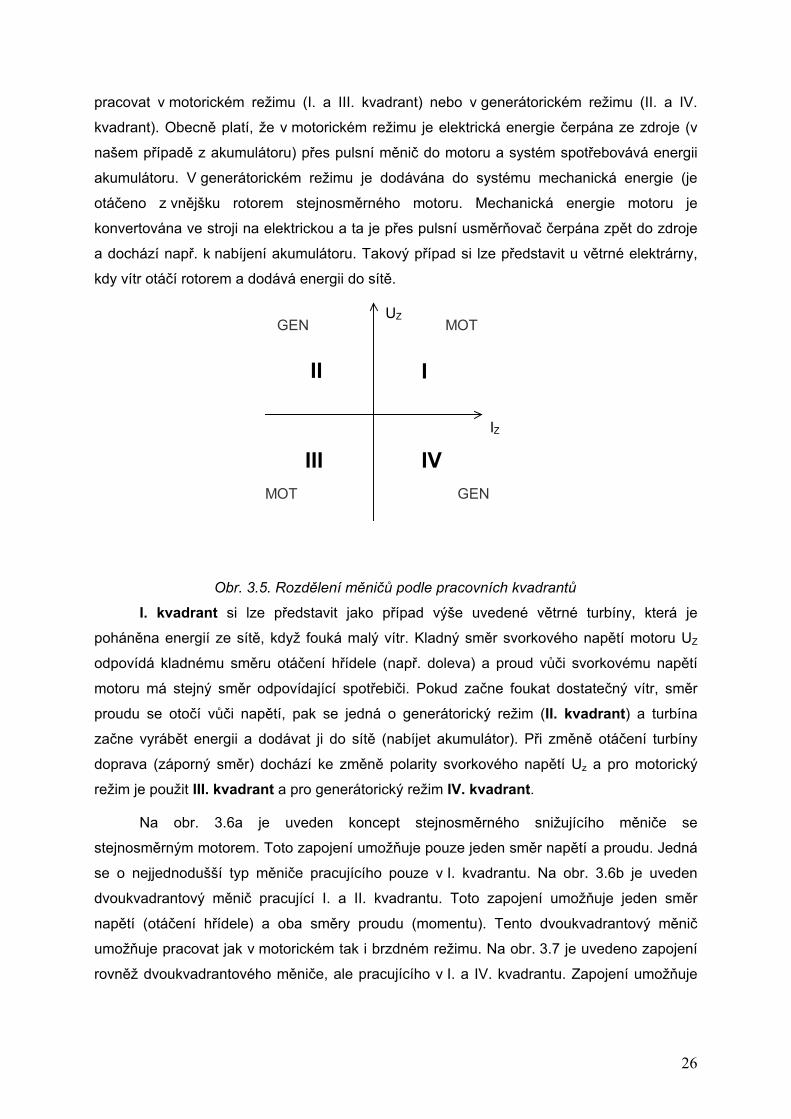
pracovat v motorickém režimu (I. a III. kvadrant) nebo v generátorickém režimu (II. a IV.
kvadrant). Obecně platí, že v motorickém režimu je elektrická energie čerpána ze zdroje (v
našem případě z akumulátoru) přes pulsní měnič do motoru a systém spotřebovává energii
akumulátoru. V generátorickém režimu je dodávána do systému mechanická energie (je
otáčeno z vnějšku rotorem stejnosměrného motoru. Mechanická energie motoru je
konvertována ve stroji na elektrickou a ta je přes pulsní usměrňovač čerpána zpět do zdroje
a dochází např. k nabíjení akumulátoru. Takový případ si lze představit u větrné elektrárny,
kdy vítr otáčí rotorem a dodává energii do sítě.
IZ
UZ
I
III IV
MOT
MOT
GEN
GEN
II
Obr. 3.5. Rozdělení měničů podle pracovních kvadrantů
I. kvadrant si lze představit jako případ výše uvedené větrné turbíny, která je
poháněna energií ze sítě, když fouká malý vítr. Kladný směr svorkového napětí motoru UZ
odpovídá kladnému směru otáčení hřídele (např. doleva) a proud vůči svorkovému napětí
motoru má stejný směr odpovídající spotřebiči. Pokud začne foukat dostatečný vítr, směr
proudu se otočí vůči napětí, pak se jedná o generátorický režim (II. kvadrant) a turbína
začne vyrábět energii a dodávat ji do sítě (nabíjet akumulátor). Při změně otáčení turbíny
doprava (záporný směr) dochází ke změně polarity svorkového napětí Uz a pro motorický
režim je použit III. kvadrant a pro generátorický režim IV. kvadrant.
Na obr. 3.6a je uveden koncept stejnosměrného snižujícího měniče se
stejnosměrným motorem. Toto zapojení umožňuje pouze jeden směr napětí a proudu. Jedná
se o nejjednodušší typ měniče pracujícího pouze v I. kvadrantu. Na obr. 3.6b je uveden
dvoukvadrantový měnič pracující I. a II. kvadrantu. Toto zapojení umožňuje jeden směr
napětí (otáčení hřídele) a oba směry proudu (momentu). Tento dvoukvadrantový měnič
umožňuje pracovat jak v motorickém tak i brzdném režimu. Na obr. 3.7 je uvedeno zapojení
rovněž dvoukvadrantového měniče, ale pracujícího v I. a IV. kvadrantu. Zapojení umožňuje
26
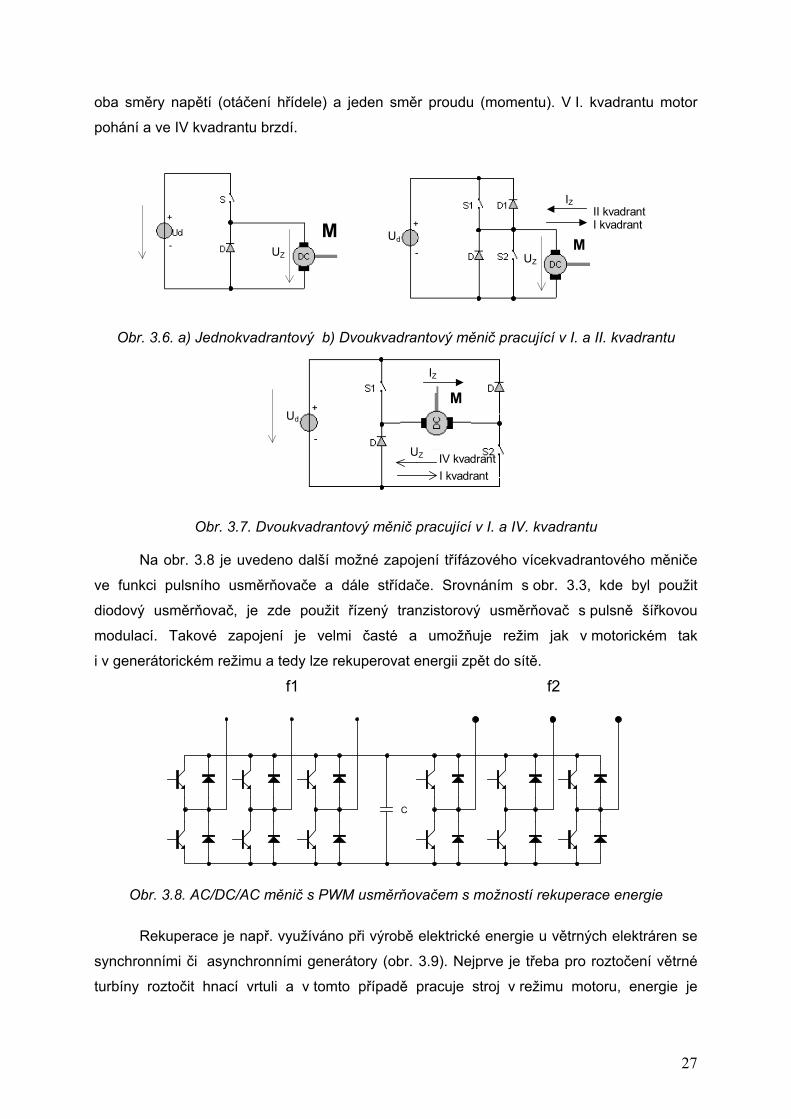
oba směry napětí (otáčení hřídele) a jeden směr proudu (momentu). V I. kvadrantu motor
pohání a ve IV kvadrantu brzdí.
UZ
MUZ
M Ud
IZ
I kvadrant II kvadrant
Obr. 3.6. a) Jednokvadrantový b) Dvoukvadrantový měnič pracující v I. a II. kvadrantu
IZ
M Ud
I kvadrantIV kvadrantUZ
Obr. 3.7. Dvoukvadrantový měnič pracující v I. a IV. kvadrantu
Na obr. 3.8 je uvedeno další možné zapojení třífázového vícekvadrantového měniče
ve funkci pulsního usměrňovače a dále střídače. Srovnáním s obr. 3.3, kde byl použit
diodový usměrňovač, je zde použit řízený tranzistorový usměrňovač s pulsně šířkovou
modulací. Takové zapojení je velmi časté a umožňuje režim jak v motorickém tak
i v generátorickém režimu a tedy lze rekuperovat energii zpět do sítě.
C
f1 f2
Obr. 3.8. AC/DC/AC měnič s PWM usměrňovačem s možností rekuperace energie
Rekuperace je např. využíváno při výrobě elektrické energie u větrných elektráren se
synchronními či asynchronními generátory (obr. 3.9). Nejprve je třeba pro roztočení větrné
turbíny roztočit hnací vrtuli a v tomto případě pracuje stroj v režimu motoru, energie je
27
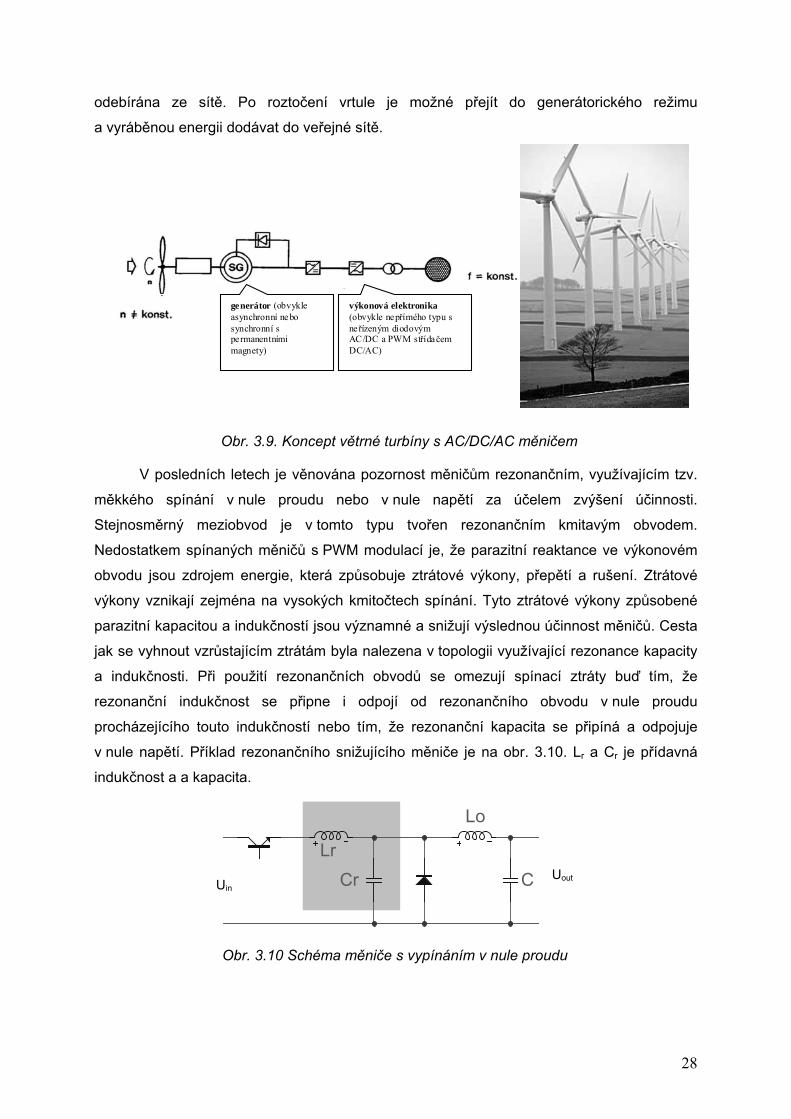
odebírána ze sítě. Po roztočení vrtule je možné přejít do generátorického režimu
a vyráběnou energii dodávat do veřejné sítě.
generátor (obvykle asynchronní nebo synchronní s permanentními magnety)
výkonová elektronika (obvykle nepřímého typu s ne řízeným diodovým AC/DC a PWM střídačem DC/AC)
Obr. 3.9. Koncept větrné turbíny s AC/DC/AC měničem
V posledních letech je věnována pozornost měničům rezonančním, využívajícím tzv.
měkkého spínání v nule proudu nebo v nule napětí za účelem zvýšení účinnosti.
Stejnosměrný meziobvod je v tomto typu tvořen rezonančním kmitavým obvodem.
Nedostatkem spínaných měničů s PWM modulací je, že parazitní reaktance ve výkonovém
obvodu jsou zdrojem energie, která způsobuje ztrátové výkony, přepětí a rušení. Ztrátové
výkony vznikají zejména na vysokých kmitočtech spínání. Tyto ztrátové výkony způsobené
parazitní kapacitou a indukčností jsou významné a snižují výslednou účinnost měničů. Cesta
jak se vyhnout vzrůstajícím ztrátám byla nalezena v topologii využívající rezonance kapacity
a indukčnosti. Při použití rezonančních obvodů se omezují spínací ztráty buď tím, že
rezonanční indukčnost se připne i odpojí od rezonančního obvodu v nule proudu
procházejícího touto indukčností nebo tím, že rezonanční kapacita se připíná a odpojuje
v nule napětí. Příklad rezonančního snižujícího měniče je na obr. 3.10. Lr a Cr je přídavná
indukčnost a a kapacita.
LrCr
Lo
CUin Uout
Obr. 3.10 Schéma měniče s vypínáním v nule proudu
28
4. Laboratorní cvičení
Organizace a pokyny k laboratorním cvičení
• Zapojovat, přepojovat přístroje je dovoleno jen pouze při rozpojení napájení.
• Při práci v blízkosti točících se strojů se nesmí nosit kovové řetízky, náramky,
prstýnky.
• Studenti jsou povinni sledovat při měření stav přístrojů a zařízení a v případě
nebezpečí musí vypnout rozvody červeným bezpečnostním tlačítkem.
• Zjištěné nedostatky na pracovišti a např. poškození přístrojů je třeba neprodleně
hlásit učiteli.
• Je dovoleno se zdržovat jen na určeném pracovišti.
• Trvale opustit laboratoř smí student jen se souhlasem učitele.
• Není-li student jist svými schopnostmi nebo zdravotním stavem, musí to včas ohlásit
učiteli a nesmí na zařízení pracovat.
• Učitel určí z řad studentů ve skupině vedoucího, který bude vést dané praktikum.
• Povinností studentů je řádně se na cvičení připravit ze skript, návodů, přednášek,
nebo z jiné literatury.
• Studenti jsou povinni mít přípravu, která bude obsahovat metodiku měření, schéma
zapojení úlohy, stručný popis měření a způsob hodnocení naměřených výsledků.
• Měření každý student zaznamenává do poznámkového sešitu. Měření zpracuje
každý student do příštího cvičení individuálně pomocí PC ve formě protokolu.
• Aktivní účast v laboratorním cvičení a zpracované výsledky měření jsou podkladem
pro udělení zápočtu.
• Jakákoli manipulace se zařízením je dovolena jen se souhlasem učitele.
• V laboratořích je bezpodmínečně nutné dodržovat laboratorní řád.
29
1-LC: Měření základních elektrických vlastností výkonové diody
Cíl měření:
Ověření základních vlastností výkonových diod. Měřením porovnejte vlastnosti výkonových
diod s běžně používanými diodami mimo oblast výkonové elektroniky
Zadání:
a) U zadaného vzorku běžné polovodičové diody (např. KY 132), výkonové diody SKKE
15/12 a speciálních typů Shotkyho diod (1N5822, PBYR 1645) změřte propustnou
charakteristiku metodou bod po bodu.
b) Určete z naměřených propustných charakteristik diod statický a dynamický odpor
v zadaném pracovním bodě (např. IF=1 A u běžné diody a u výkonové 10 A). Dále
určete prahové napětí.
c) Určete ztrátový výkon na diodě. Měřením ověřte katalogové hodnoty výkonové diody.
d) Měřením ověřte a porovnejte spínací vlastnosti jednotlivých diod v závislosti na
frekvenci. Zejména se zaměřte na závěrnou zotavovací dobu trr při vypnutí vedení
diod. Porovnejte dynamické vlastnosti diod.
Použité přístroje:
stabilizovaný zdroj DC napětí 0-40 V/ 40 A;
digitální osciloskop;
proudová bezkontaktní sonda a diferenciální napěťová sonda.
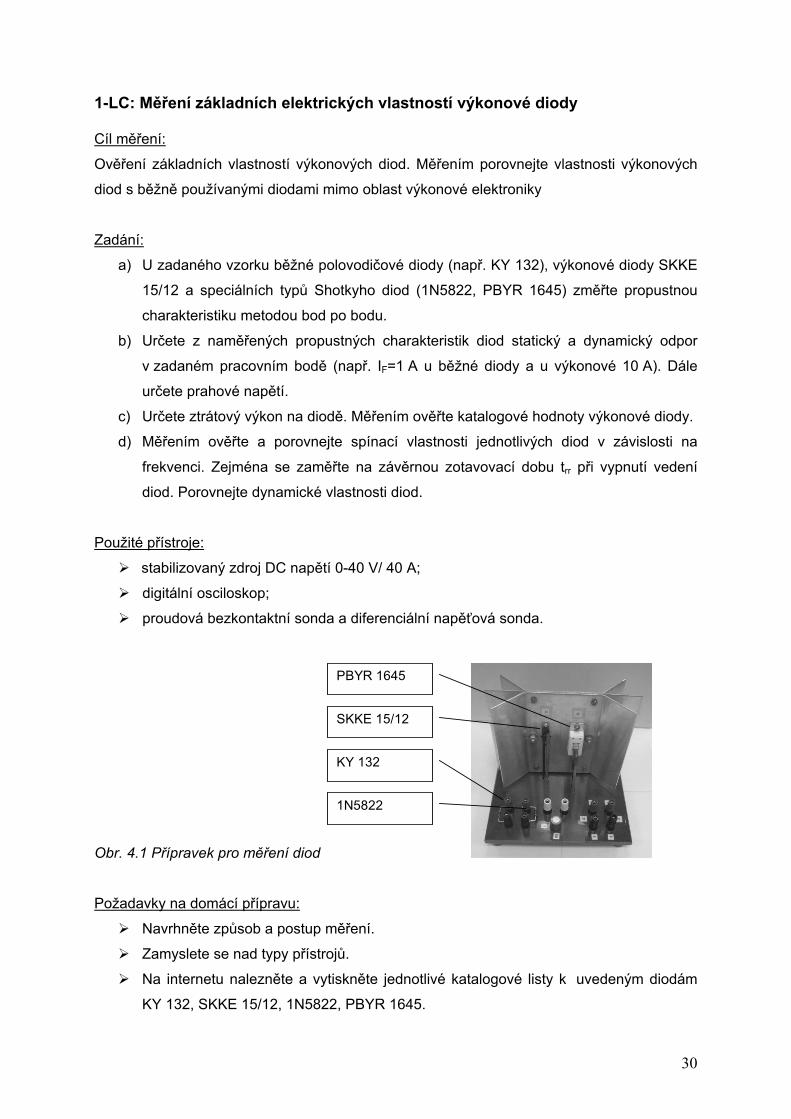
Obr. 4.1 Přípravek pro měření diod
SKKE 15/12
PBYR 1645
KY 132
1N5822
Požadavky na domácí přípravu:
Navrhněte způsob a postup měření.
Zamyslete se nad typy přístrojů.
Na internetu nalezněte a vytiskněte jednotlivé katalogové listy k uvedeným diodám
KY 132, SKKE 15/12, 1N5822, PBYR 1645.
30
2-LC: Měření elektrických vlastností výkonových spínačů (I)
Cíl měření:
Ověření a porovnání vlastností výkonových spínačů: BJT, MOSFET a tyristoru
Zadání:
a) Změřte u předloženého vzorku MOSFET s kanálem N (např. IRF 540, IRF 840,
BUZ 71) soustavu výstupních stejnosměrých VA charakteristik a určete závislost
odporu tranzistoru v sepnutém stavu na proudu kolektoru IDS s parametrem UGS.
b) U předložených vzorků tranzistorů změřte spínací vlastnosti, zejména sepnutí
a vypnutí tranzistorů. Porovnejte vlastnosti BJT a MOSFET.
c) U předložených vzorků tyristorů určete zda se jedná o tyristor GTO.
d) Změřte propustnou charakteristiku vybraného tyristoru a měřením určete zapínací
a vypínací doby.
Použité přístroje:
stabilizovaný zdroj DC napětí 0-40 V/ 40 A;
digitální osciloskop;
proudová bezkontaktní sonda a diferenciální napěťová sonda.
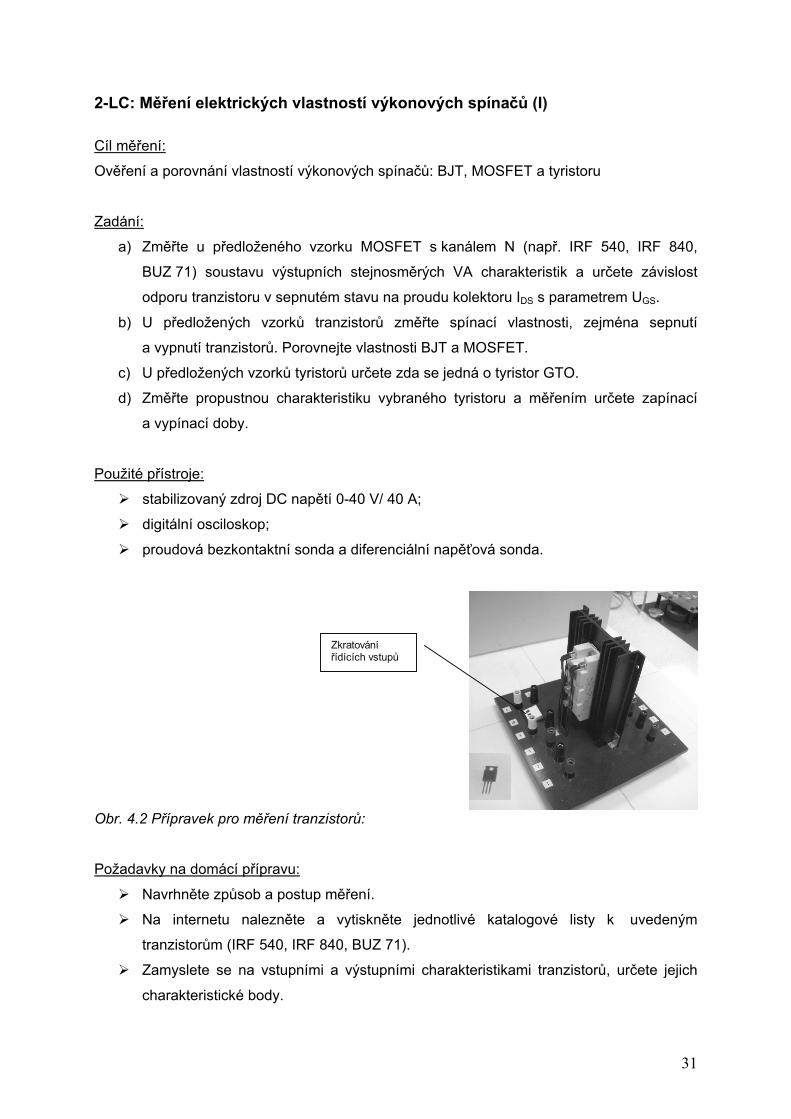
Zkratování řídících vstupů
Obr. 4.2 Přípravek pro měření tranzistorů:
Požadavky na domácí přípravu:
Navrhněte způsob a postup měření.
Na internetu nalezněte a vytiskněte jednotlivé katalogové listy k uvedeným
tranzistorům (IRF 540, IRF 840, BUZ 71).
Zamyslete se na vstupními a výstupními charakteristikami tranzistorů, určete jejich
charakteristické body.
31
3-LC: Měření elektrických vlastností výkonových spínačů (II)
Cíl měření:
Porovnání vlastností výkonových MOSFETů a IGBT tranzistorů
Zadání:
a) Ověřte dynamické vlastnosti spínače MOSFET (IRF 540).
b) Sestavte podle pokynů obvod s budičem (FUJI 840) na nepájívém poli a porovnejte
dynamické vlastnosti tranzistoru s budičem a bez budiče. Dále určete přibližně mezní
kmitočet spínání. Porovnejte s katalogem.
c) Ověřte spínací vlastnosti IGBT (IRG4BC10KD) a porovnejte jeho statické
a dynamické vlastnosti s výsledky u tranzistoru MOSFET.
d) Určete vliv RL zátěže na dynamické vlastnosti spínačů.
e) Seznamte se s bezpotenciálovými moduly (např.SKM 100GB 128 DN a SEMIX
101GD066HDS). Ověřte jejich vlastnosti.
Použité přístroje:
stabilizovaný zdroj DC napětí 0-40 V/ 40 A;
digitální osciloskop;
proudová bezkontaktní sonda a diferenciální napěťová sonda.
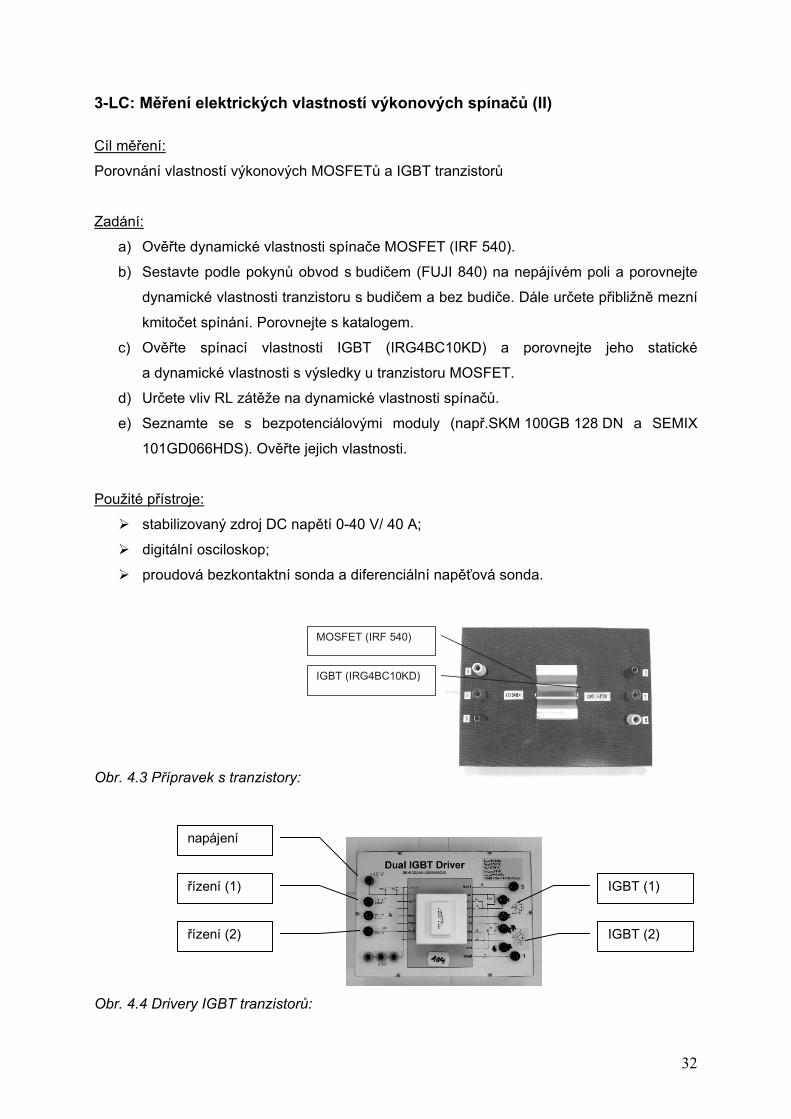
Obr. 4.3 Přípravek s tranzistory:
MOSFET (IRF 540)
IGBT (IRG4BC10KD)
napájení
řízení (1)
řízení (2)
IGBT (1)
IGBT (2)
Obr. 4.4 Drivery IGBT tranzistorů:
32

Požadavky na domácí přípravu:
Navrhněte způsob a postup měření.
Na internetu nalezněte a vytiskněte jednotlivé katalogové listy k uvedeným
tranzistorům (IRF 540, IRF 840, BUZ 71).
Zamyslete se na vstupními a výstupními charakteristikami tranzistorů, určete jejich
charakteristické body.
33

4-LC: Vlastnosti neřízených diodových usměrňovačů.
Cíl měření:
Měření vstupních a výstupních charakteristik jednopulsního usměrňovače a šestipulsního
usměrňovače s odporovou, RL a RC zatěží.
Zadání:
a) Zapojení jednopulsního usměrňovače napájíme z jednofázového transformátoru.
Zatěžovací odpor určete s ohledem na jmenovité hodnoty diody. Osciloskopem
zobrazte proud a napětí na zátěži a dále i proud na vstupu měniče.
b) Jednopulsní usměrňovač zapojte s RL zatéží a porovnejte výstupní proud. Podobně
realizujte zapojení s RC zátěží.
c) Pomocí simulačního programu MicroCAP analyzujte vlastnosti šestipulsního
usměrňovače. Určete výsledné napětové a proudové spektrum. Dále určete spektrum
vstupního proudu a zamyslete se nad jeho vlivem v obvodu.
d) Analyzujte v MicroCAPU ztráty na diodě vlivem vyšší frekvence vstupního napětí.
e) Měřením ověřte výše uvedené počítačové analýzy.
Použité přístroje:
AC napětí 0-400 V/ 50 HZ;
digitální osciloskop;
proudová bezkontaktní sonda a diferenciální napěťová sonda;
1 fázový a 3 fázový neřízený usměrňovač.
Požadavky na domácí přípravu:
v prostředí MicroCAP namodelujte jednotlivé topologie diodových usměrňovačů,
určete vliv vstupního kmitočtu na požadavky diod usměrňovače;
analyzujte vliv kapacity na výstupu usměrňovače.
34
5-LC: Stejnosměrný pohon napájený z řízeného usměrňovače s tyristory
Cíl měření:
Měření vstupních a výstupních charakteristik tyristorových řízených usměrňovačů. Analyzujte
způsoby řízení v závislosti na topologii měniče. Použijte řízených usměrňovačů jako
regulátorů otáček DC pohonů. Měření má především ozřejmit jeho funkčnost a zjištění jeho
pracovních a provozních charakteristik.
Zadání:
a) Ověřte vstupní a výstupní a charakteristiky tyristorového 1 fázový usměrňovače
RT 380 M v topologii B2C a 3 fázového usměrňovače MP380T. Určete jejich rozsah
řízení a schopnost práce s indukční zátěží.
b) Digitálním osciloskopem sejměte výstupní napětí a proud a určete jejich parametry (f,
T, Ustř,Istř, zvlnění, zatěžovatel)
c) Změřte řídící charakteristiku pro různé mody MP380T v rozsahu 0 až 100%
s možností linearizování výstupní charakteristiky pomocí přepínače 9_0 a 9_L (viz
katalogový list).
d) Použijte 1 fázový a 3 fázový tyristorový usměrňovač jako regulátory pro pohon DC
motoru (v našem případě motoru z pračky). Určete rozsahy regulace otáček. (Pozn.
regulace otáček motoru se realizuje změnou napětí na kotvě DC motoru s konstantním buzením.) e) Změřte charakteristiku 3 fázového regulátoru MP380T naprázdno U=f(Ib) při různých
otáčkách, které jsou pro každé měřené konstantní.
Použité přístroje:
AC napětí 0-400 V/ 50 Hz;
digitální osciloskop;
1 fázový regulátor RT 380 M v topologii B2C a 3 fázový regulátor MP380T;
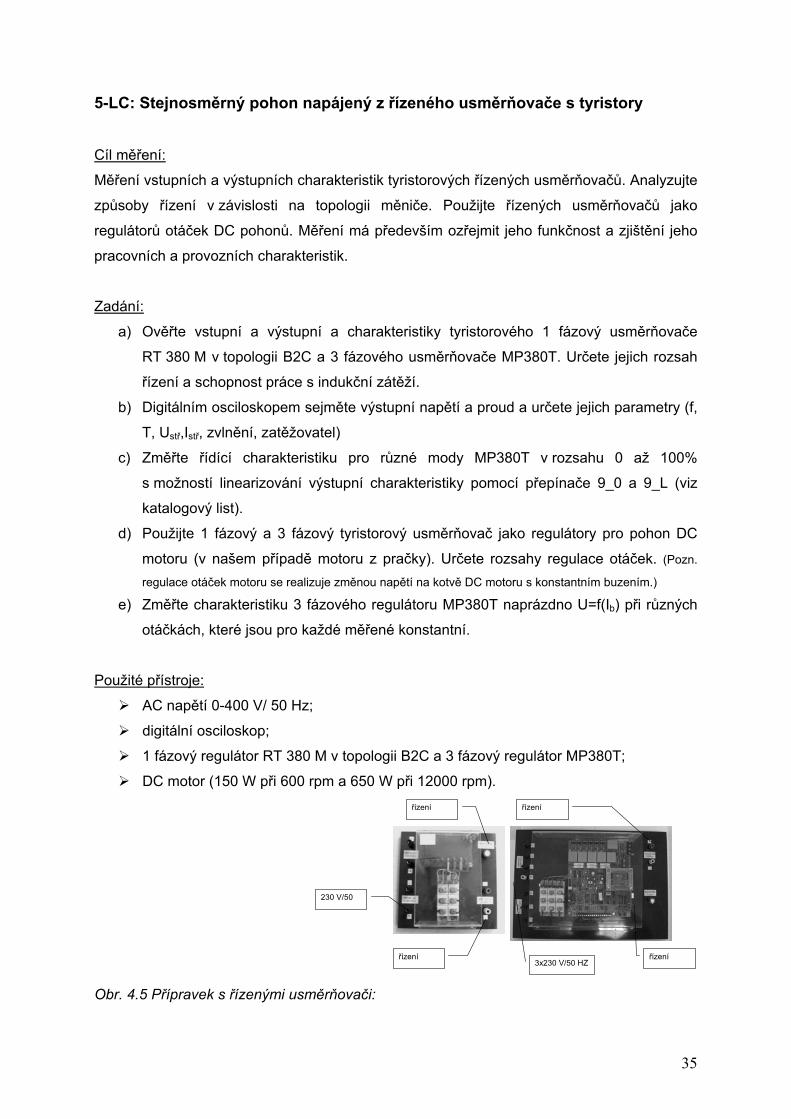
DC motor (150 W při 600 rpm a 650 W při 12000 rpm). řízení
řízenířízení
řízení
230 V/50
3x230 V/50 HZ
Obr. 4.5 Přípravek s řízenými usměrňovači:
35

Obr. 4.6 Přípravek DC pohonu
DC motor
Regulátor otáček
Požadavky na domácí přípravu:
v prostředí MicroCAP namodelujte 3 fázový tyristorový usměrňovač,
určete vliv α na výstupní střední hodnotu napětí;
analyzujte vliv kmitočtu a indukčnosti na výstupní napětí.
36
6-LC: Měření na řízených usměrňovačích s IGBT tranzistory a s PWM
Cíl měření:
Měření vstupních a výstupních charakteristik IGBT třífázových řízených usměrňovačů
s PWM modulací. Analyzujte a realizujte takový způsob řízení na přípravku hradlovými poli.
Zadání:
a) V prostředí MicroCAP namodelujte třífázový tranzistorový PWM usměrňovač.
b) Navrhněte řízení IGBT usměrňovače s PWM modulací, aby v měziobvodu bylo
konstantní napětí 600 V.
c) Ověřte vámi navrhnuté řízení na přípravku s hradlovými poli, které umožňuje spojení
s prostředí MicroCAP a připojte k silovému modelu s třífázovým IGBT
usměrňovačem.
d) Měřením ověřte vámi sestavený model.
Použité přístroje:
AC napětí 0-400 V/ 50 Hz;
digitální osciloskop;
systém 3f. můstku s IGBT tranzistory;
hradlové pole;
3 fázová odporová zátěž.
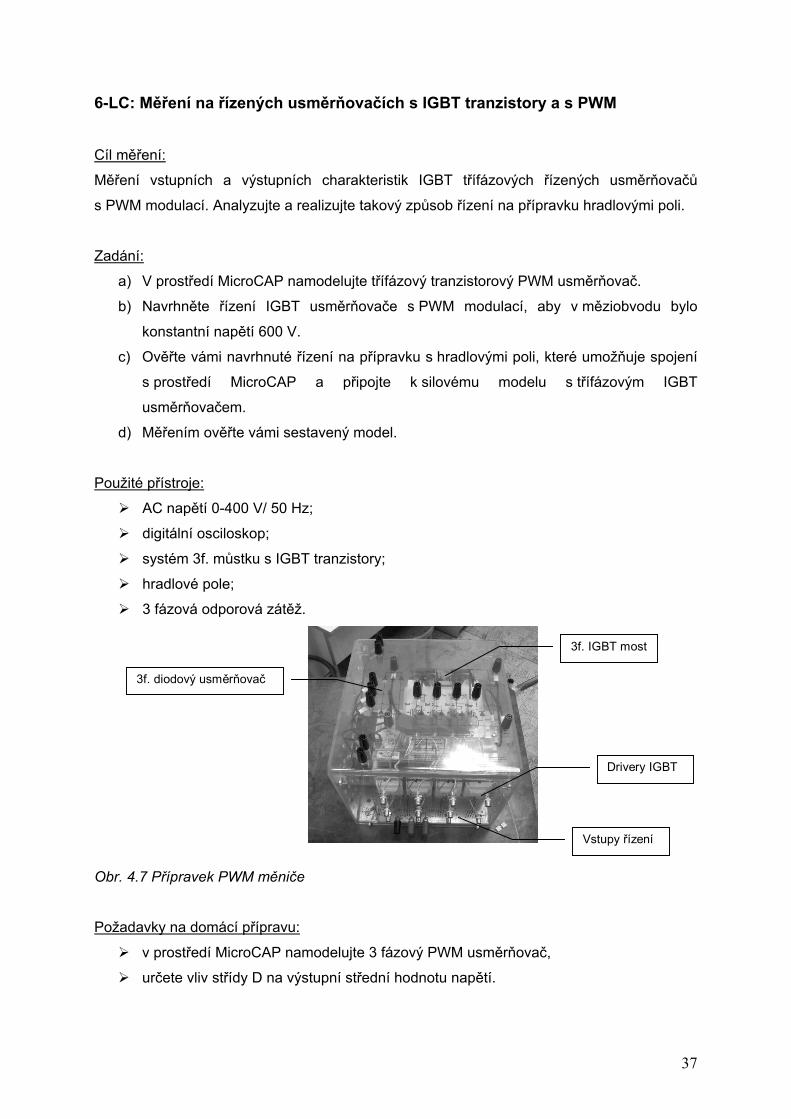
3f. diodový usměrňovač
3f. IGBT most
Drivery IGBT
Vstupy řízení
Obr. 4.7 Přípravek PWM měniče
Požadavky na domácí přípravu:
v prostředí MicroCAP namodelujte 3 fázový PWM usměrňovač,
určete vliv střídy D na výstupní střední hodnotu napětí.
37
7-LC: Měření na DC/DC měničích s indukčností a transformátorem
Cíl měření:
Porovnání vlastností jednotlivých typů DC/DC měničů. Cílem je taky pochopit princip
a činnost jednotlivých typů měničů.
Zadání:
a) Změřte vlastnosti a funkci snižujícího měniče Buck.
b) Ověřte vliv indukčnosti na zvlnění proudu tlumivkou.
c) Dále ověřte vliv výstupní kapacity měniče na zvlnění výstupního napětí.
d) Ověřte vlastnosti dalších měničů pulsních měničů Boost, Buck-Boost a Cuk.
Srovnejte jejich vlastnosti, elektrické parametry a možnosti řízení.
e) Změřte vlastnosti DC/DC měniče Forward a vliv velikosti zátěže na výstupní napětí.
f) Ověřte vlastnosti DC/DC měniče Lambda se svorkami „senze“, určete k čemu slouží.
Měřením určete kmitočet spínání měniče. Navrhněte způsob měření.
Použité přístroje:
stabilizovaný zdroj DC napětí 0-40V/ 4A;
digitální osciloskop;
bezkontaktní snímače proudu, diferenciální napěťové sondy.
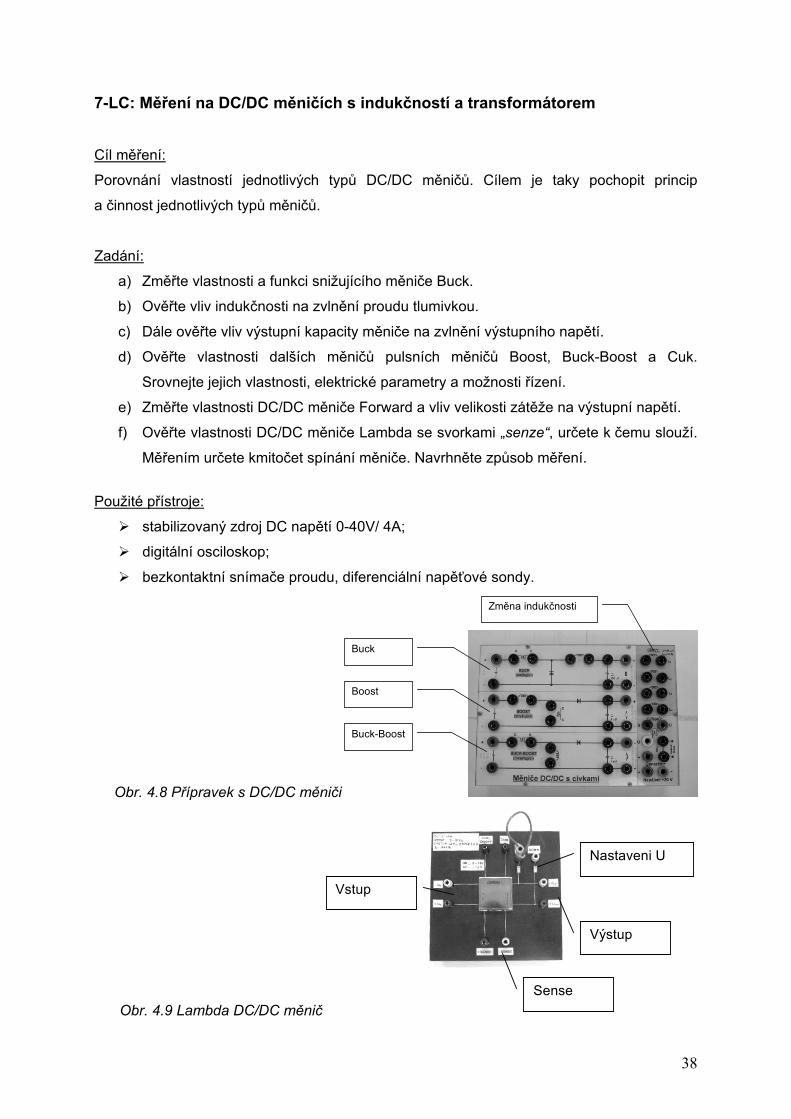
Obr. 4.8 Přípravek s DC/DC měniči
Buck
Boost
Buck-Boost
Změna indukčnosti
Obr. 4.9 Lambda DC/DC měničSense
Výstup
Nastaveni U
Vstup
38

Požadavky na domácí přípravu:
v prostředí MicroCAP namodelujte Boost.
určete vliv střídy D na výstupní střední hodnotu napětí.
určete vliv kmitočtu na velikost tlumivky a dále na zvlnění proudu.
V prostředí MicroCAP namodelujte měniče Forward a srovnejte jeho vlastnosti
s měničem Boost.
39
8-LC: Měření na DC/AC měničích (střídačích)
Cíl měření:
Střídače, jejich principy a vlastnosti
Zadání:
a) Změřte výstupní charakteristiky jednofázových střídačů a dále změřte spektrum
výstupního napětí střídače. Určete vyšší harmonické a navrhněte způsob řízení
střídače tak, aby bylo dosaženo redukce těchto vyšších harmonických.
b) Namodelujte 3 fázový střídač s PWM v prostředí MicroCAP.
c) Zapojte 3 fázový střídač s PWM a ověřte jeho vlastnosti.
d) Použijte 3 fázového střídače pro pohon s asynchroním motorem.
Použité přístroje:
AC napětí 0-400 V/ 50 Hz;
digitální osciloskop;
systém 3 fázového můstku s IGBT tranzistory (viz. obr. 4.7);
hradlové pole jako systém řízení s PWM modulací;
3 fázová odporová zátěž;
3 fázový asynchronní motor.
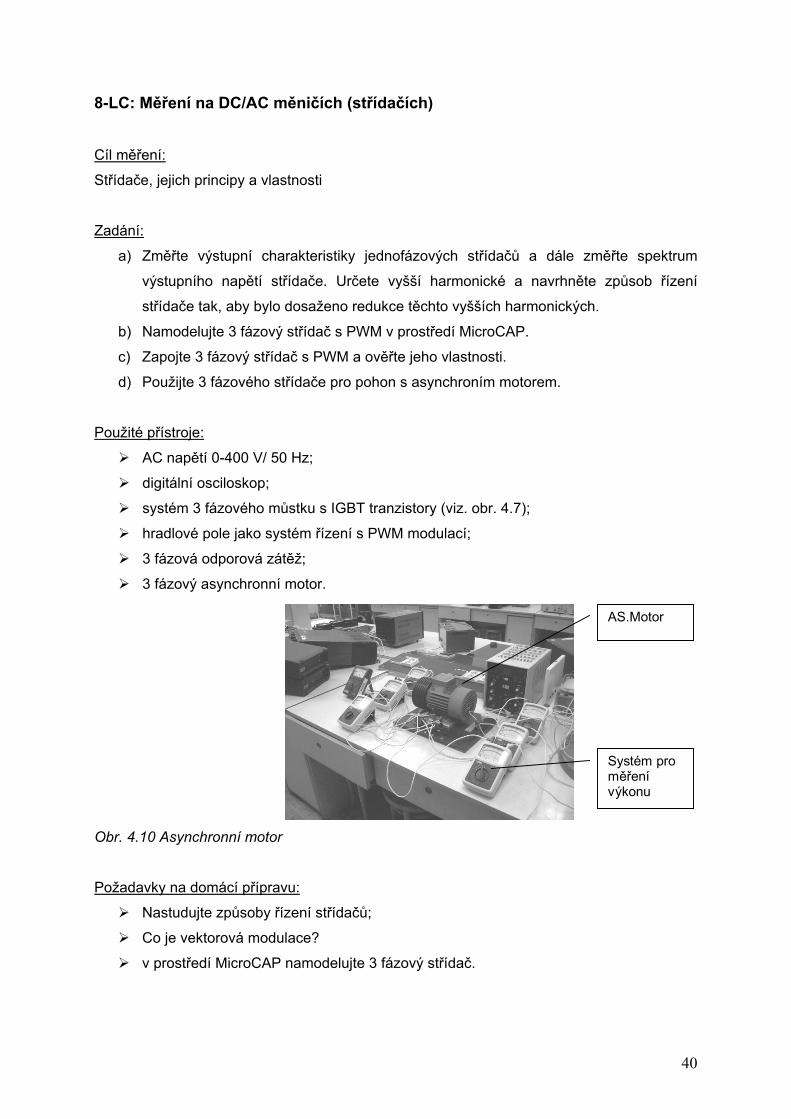
AS.Motor
Systém pro měření výkonu
Obr. 4.10 Asynchronní motor
Požadavky na domácí přípravu:
Nastudujte způsoby řízení střídačů;
Co je vektorová modulace?
v prostředí MicroCAP namodelujte 3 fázový střídač.
40
9-LC: Asynchronní motor s měničem frekvence
Cíl měření:
Cíl měření je prakticky si odzkoušet řízení otáček asynchronního motoru s kotvou nakrátko
při zatížení. Cílem je také naučit se nastavit a parametrizovat pohon.
Zadání:
a) Asynchronní motor připojte k výstupu měniče frekvence a proměřte závislost
výstupního napětí měniče na nastavení výstupní frekvence měniče zatíženého
asynchronním motorem běžícím naprázdno U1=f(f1).
b) Proveďte nastavení vybraných parametrů měniče.
c) Změřte síť momentových charakteristik s kotvou nakrátko pro frekvence napájecího
napětí 20; 40; 50 a 90 Hz.
d) Změřte závislost efektivní hodnoty výstupního napětí měniče frekvence na frekvenci
tohoto napětí U1=f(f1) v rozsahu 10-100 Hz při chodu naprázdno.
e) Proměřte přechodné děje elektrického pohonu, měření časových konstant.
f) Použijte zařízení a Soft-start a ověřte jeho funkci.
Použité přístroje:
AC napětí 0-400 V/ 50 Hz;
digitální osciloskop;
3 fázová odporová zátěž;
3 fázový asynchronní motor.
Požadavky na domácí přípravu:
Nastudujte přílohu č. 2 ze skript, kde je uvedena metodiky ovládání měniče Siemens.
41
10-LC: Měření na fotovoltaických zdrojích elektrické energie
Cíl měření:
Cílem měření je seznámit se s fotovoltaickými zdroji elektrické energie a dále s obsluhou
fotovoltaických modulů a jejich vzájemným spojováním.
Zadání:
a) Změřte napětí naprázdno a proud nakrátko dvou jednotlivý monokrystalických
fotovoltaických článků pro různé úrovně intenzity osvětlení.
b) Dále změřte zatěžovací charakteristiku fotovoltaického článku;
c) Seznamte se s obsluhou a kostrukcí fotovoltaického článku a jejich spojováním do
série a paralelně. Určete výhody a nevýhody sériového a paralelního spojení;
d) Změřte napětí naprázdno a proud nakrátko solárního modulu TRIMEX TESLA M-36-
53 při různých úrovních osvětlení;
e) Změřte V-A zatěžovací charakteristiku modulu pro dvě úrovně osvětlení;
Použité přístroje:
stabilizovaný zdroj DC napětí 0-40V/ 4A;
fotovoltaické panely;
multimetr.
Obr. 4.11 Přípravek s fotovoltaickými články
Požadavky na domácí přípravu:
Seznamte se s aplikacemi fotovoltaiky.
Na jakém principů fungují fotovoltaické články?
Spočítejte, kolik je potřeba energie při výrobě 2 kW s použitím fotovoltaiky. Je
účinnost fotovoltaického panelu funkcí teploty?
42
Příloha 1: Obsah a osnova předmětu „Výkonové polovodičové měniče 1.téma: Úvod do Výkonové elektroniky a Elektrických pohonů
Prvky, stavební bloky, obvody a aplikace Výkonové elektroniky (VE). Výkonová elektronika versus obvody s lineárními prvky.
2.téma: Přehled a popis výkonových spínačů, elektrických a magnetických obvodů VE
Výkonové spínací součástky; elektrické a magnetické obvody Výkonové elektroniky.
3.téma: Ztráty a chlazení v obvodech výkonové elektroniky; činný výkon Tepelné jevy, činný a ztrátový výkon, chlazení v obvodech výkonové elektroniky. Měření.
4.téma: Pulsně šířková modulace (PWM) Matematický popis PWM modulace, obvodové řešení sinusového PWM modulátoru napěťového typu.
5.téma: Obvody VE: diodové usměrňovače a pulsní AC/DC a DC/AC měniče Základní koncepce, matematická analýza a princip činnosti jednofázového a třífázového usměrňovače, střídače. Vektorová modulace.
6.téma: Pulsní DC/DC měniče Pulsní DC/DC měniče s tlumivkou (Boost, Buck, Cuk) a s transformátorem (Forward, Flyback). Dvojčinný čtyřkvadrantový DC/DC měnič.
7.téma: Návrh DC/DC měniče typu Buck-Boost včetně jeho tlumivky a jeho PWM řízení
Obvodový návrh DC/DC měniče typu Buck-Boost včetně jeho tlumivky a jeho řízení PWM modulací
8.téma: Rezonační měniče
Klasifikace rezonačních měničů. Popis měkkého spínání v nule napětí a v nule proudu
9.téma: Spínané napájecí zdroje elektrické energie. PFC obvody.
Klasifikace spínaných napájecích zdrojů elektrické energie. Zpětnovazební řízení stejnosměrných zdrojů elektrické energie. PFC obvody.
10.téma: Elektrické pohony.
Elektrické pohony a jejich klasifikace. Způsoby řízení a nastavování AC a DC pohonů.
43
Příloha 2: Popis frekvenčního měniče SIEMENS – SIMOVERT Jmenovitá hodnota napájecího napětí 3x380 V, až 480 V Jmenovitá hodnota výstupního napětí 3x0 až napájecí napětí Jmenovitá hodnota napětí v meziobvodu 510 V, až 650 V Střídač umožňuje měnit frekvenci 0-600 Hz při U/f
8-300 Hz při U=k Display: - číslo parametru Musí se přepínat P - index parametru - hodnota parametru Tlačítka: I…zapnutí měniče O… vypnutí měniče Jog…tip ⇔…reverzace P…přepínání parametrů na indexy a jejich hodnoty Reset…opuštění menu a potvrzení poruchy (kvitování) ⇑⇓…více a méně ±…změna tlačítka 0 až 9…numerická klávesnice
Zobrazení vybraných parametrů: R002 …frekvence R015 …otáčky R004 …výstupní proud R007 …moment R006 …DC napětí Parametrování: P060=6…tovární nastavení, P060- výběr menu P060=3…rychlé parametrování, str. 9-13 P060=8…podrobné nastavení, definice silové části, str. 9-35 P060=5…podrobné nastavení, NASTAVENÍ POHONU, str. 9-43 Parametry: P068=…výstupní filtr P095=…typ motoru P100=…mód řízení a regulace P101 až P109…štítkové údaje motoru P340=…hodnota modulační frekvence
44
Literatura [1] Mohan, N.: „Power Electronics”, Knižní publikace - Prentice Hall, ISBN 0-02-351182-6.
New Jersey, USA 1997
[2] www.semicron.com/
[3] Vondrášek.K.: „Výkonová elektronika“. Učební texty ČVUT Praha 1995
[4] www.fuji.com
[5] www.powerint.com
[6] Čeřovský.Z.: „Výkonová elektronika I“. Učební texty ZČU Plzeň 1996
[7] Patočka, J.: „Vybrané stati z výkonové elektroniky“. Učební texty VUT FEI Brno. 1995
[8] Krejcirik, A.: „DC/DC měniče“. Knižní publikace, ISBN 80-7300-045-8, BEN - technická
literatura. Praha 2001
[9] Faktor, Z.: „Transformátory a tlumivky pro spínané zdroje“. Knižní publikace, ISBN 80-
86056-91-0, BEN - technická literatura. Praha 2002
[10] Bláha, E. – Havlik, L.: „Měření polovodičových součástek“. Knižní publikace, ISBN 04-
542-70, SNTL - Nakladatelství technické literatury, Praha 1970
[11] Elberg, S.: „Odvod tepla z elektronických zařízení“. Knižní publikace, ISBN 04-533-83,
SNTL - Nakladatelství technické literatury, Praha 1983
[12] Skalický, J.: „Elektrické pohony a výkonová elektronika: současný stav, perspektivy a
výuka. Transformátory a tlumivky pro spínané zdroje“. Inaugurační přednáška ke jmenování
profesorem, ISBN 80-214-1601-7, VUT Brno 2000
[13] Patočka, J.: „Vybrané stati z výkonové elektroniky“. Učební texty VUT FEI Brno. 1995
[14] www.siemens.de/automation
[15] U-206; učebnice UO
45

















