FYZIKA Vědní obor zkoumající zákonitosti přírodních jevů. Popisuje vlastnosti a projevy hmoty ve všech jejích známých podobách (hmota, antihmota, vakuum, interakce mezi různými formami hmoty, atd.) Vztahy mezi těmito objekty fyzika obvykle vyjadřuje matematickými prostředky. Mechanika Termika Elektromagnetismus Optika Atomová a molekulová fyzika Jaderná a subjaderná fyzika Astrofyzika Aplikovaná fyzika Chemická fyzika, Fyzikální chemie, Biofyzika, Biomechanika, atd. HMOTA základní atributy hmoty – pohyb, prostor, čas – vždy a všude jsou spojeny s každou z forem hmoty Definice! každý hmotný objekt je charakterizován dvěmi vlastnostmi – setrvačností a schopností konat práci ⇓ Setrvačnost – schopnost hmotného objektu setrvávat v okamžitém stavu – fyzikální veličinou charakterizující kvantitativně setrvačnost je hmotnost m Schopnost konat práci – schopnost hmotného objektu za vhodných podmínek samovolně měnit stav svůj i stav s ním interagujících objektů – schopnost konat práci je charakterizována fyzikální veličinou energie E diskrétní (látky) energie, klidová hmotnost m 0 ≠ 0 korpuskulární charakter (tvar) elementární částice, složitější mikročástice, makroskopická tělesa, biologické útvary, kosmické útvary pole energie, klidová hmotnost m 0 =0 vlnový charakter zprostředkovávají vzájemné působení mezi diskrétními formami hmoty, nositeli informací jsou tzv. kvanta FORMY HMOTY klasická fyzika – I. Newton částice –přesná lokalizace v prostoru – pohyb po definované trajektorii – ostré vymezení povrchu pole – šíření vzruchu prostorem – difrakční a interferenční jevy kvantová fyzika dualismus chování hmoty - nelze jednoznačně vymezit zda se jedná o částici či vlnu (pole), přičemž jedno může přecházet v druhé FYZIKÁLNÍ DŮSLEDKY ( ) ( ) ( ) γ + ⎯⎯⎯⎯⎯→ anihilace - + e elektron e pozitron 2 foton HMOTNOST A ENERGIE Hmotnost – míra setrvačnosti těles a jejich gravitačních vlastností – setrvačnost těles se projeví při působení síly – hmotnost je neoddělitelnou vlastností hmoty v obou jejích formách Váha tělesa – míra působení tělesa na podložku v důsledku „zemské“ přitažlivosti – je úměrná jeho hmotnosti m, konstantou úměrnosti je gravitační zrychlení g Energie – z fyzikálního pohledu neexistuje „obecná definice“ pojmu energie – má mnoho různých forem – gravitační, kinetická, tepelná, elektrická, elastická, chemická, jaderná, energie vázaná na hmotnost, apod. –různé druhy energie se mohou navzájem přeměňovat, pro vzájemnou přeměnu jednotlivých druhů energií platí přesné vztahy = . G gm – základem fyziky je měření, tedy kvalitativní a kvantitativní vyhodnocování veličin, které používáme k popisu fyzikálních vlastností hmoty a jejich změn (délka, čas, hmotnost, energie, teplota, atd.) – k popisu fyzikální veličiny je třeba stanovit její jednotku, tzn. takovou míru této veličiny, které přisoudíme číselnou hodnotu přesně 1,0 – každá veličina i její jednotka mají kromě názvu také značku – poté vytvoříme standard, s nímž budeme všechny ostatní hodnoty dané fyzikální veličiny porovnávat MĚŘENÍ Příklad: veličina: délka jednotka: metr standard: vzdálenost, kterou světlo urazí za 1 / 299 792 458 s – fyzikálních veličin je značné množství, řada z nich ale není navzájem nezávislá ⇒ lze vybrat malý počet základních veličin a definovat jejich vlastní standardy ostatní veličiny jsou vyjádřitelné pomocí zvolených veličin základních – standardy základních veličin musí být dostupné a při opakovaném měření neměnné PROBLÉMY: – volba měřícího zařízení – vliv měření na hodnotu měřené veličiny (kvantová mechanika) Dělení fyzikálních veličin – skalární veličiny (jednorozměrné) veličiny, kterým nelze přisoudit směr; jsou určeny jediným číslem (velikostí) a při počítání s nimi užíváme pravidel běžné algebry; např. hmotnost, energie, tlak, atd. – vektorové veličiny (dvourozměrné) veličiny, které mají velikost a směr; práce s vektory se řídí speciálními pravidly např. rychlost, zrychlení, síla, atd. – tenzorové veličiny (vícerozměrné) veličiny reprezentované vyšším počtem složek (skalár – tenzor 0. řádu, vektor – tenzor 1. řádu) např. tenzor elektrické vodivosti, tenzor napětí, atd. – extenzivní veličiny (aditivní) veličiny závisející na počtu částic soustavy (tedy látkovém množství, popřípadě hmotnosti) např. hmotnost, energie, rozměry, atd. – intenzivní veličiny (neaditivní) veličiny na počtu částic v soustavě nezávislé nelze je kvantifikovat přímo, je nutné provést nepřímé měření vhodné extenzivní veličiny např. teplota, tlak, hustota, atd. – protenzivní veličiny trvale spojitě se vyvíjející veličiny bez možnosti zpětné reprodukce, např. čas A a B Souřadnicové soustavy Kartézská Sférická Cylindrická – soustava vzhledem k níž je poloha libovolného bodu v trojrozměrném prostoru jednoznačně určena uspořádanou trojící veličin nazývaných souřadnice – zavádí se zpravidla tak, že se zvolí její počátek (počáteční bod) O a tři navzájem kolmé orientované přímky procházející počátkem O a nazývané osy souřadnic (osy soustavy souřadnic, souřadnicové osy) – souřadnicové soustavy Práce s vektory = + = + + 2 2 1 2 2 2 2 1 2 3 2D: 3D: u u u u u u u velikost vektoru vektorový součet (rozdíl) ( ) ( ) ( ) ( ) α = = = + = + = + = + + = + + 1 2 1 2 1 1 2 2 2 2 , , , 2 cos u uu v vv w u v w u v v u u vu v w u v uv Skalární součin α α ⋅ = + ⋅ = ⋅ ⋅ ⋅ + = = ⋅ + + + 11 2 2 11 2 2 2 2 2 2 1 2 1 2 cos cos uv uv uv uv u v uv uv uv u v u u v v – skalární součin se definuje mezi dvěma vektory a zachycuje vztah mezi velikostí vektorů a jejich úhlem
Transcript
FYZIKAVědní obor zkoumající zákonitosti přírodních jevů. Popisuje vlastnosti a projevy hmoty ve všech jejích známých podobách (hmota, antihmota, vakuum, interakce mezi různými formami hmoty, atd.) Vztahy mezi těmito objekty fyzika obvykle vyjadřuje matematickými prostředky.
Mechanika
Termika
Elektromagnetismus
Optika
Atomová a molekulová fyzika
Jaderná a subjaderná fyzika
Astrofyzika
Aplikovaná fyzika
Chemická fyzika, Fyzikální chemie, Biofyzika, Biomechanika, atd.
HMOTA
základní atributy hmoty – pohyb, prostor, čas– vždy a všude jsou spojeny s každou z forem hmoty
Definice!
každý hmotný objekt je charakterizován dvěmi vlastnostmi – setrvačností a schopností konat práci
⇓Setrvačnost – schopnost hmotného objektu setrvávat v okamžitém stavu
– fyzikální veličinou charakterizující kvantitativně setrvačnost je hmotnost m
Schopnost konat práci – schopnost hmotného objektu za vhodných podmínek samovolně měnit stavsvůj i stav s ním interagujících objektů
– schopnost konat práci je charakterizována fyzikální veličinou energie E
diskrétní (látky)energie, klidová hmotnost m0 ≠ 0
korpuskulární charakter (tvar) elementární částice, složitější
vlnový charakter zprostředkovávají vzájemné působení mezi
diskrétními formami hmoty, nositeli informací jsou tzv. kvanta
FORMY HMOTY
klasická fyzika – I. Newtončástice – přesná lokalizace v prostoru
– pohyb po definované trajektorii– ostré vymezení povrchu
pole – šíření vzruchu prostorem– difrakční a interferenční jevy
kvantová fyzikadualismus chování hmoty - nelze jednoznačně vymezit zda se jedná o částici či vlnu (pole), přičemž jedno může přecházet v druhé
FYZIKÁLNÍ DŮSLEDKY
( ) ( ) ( )γ+ ⎯⎯⎯⎯⎯→anihilace- +e elektron e pozitron 2 foton
HMOTNOST A ENERGIE
Hmotnost – míra setrvačnosti těles a jejich gravitačních vlastností
– setrvačnost těles se projeví při působení síly
– hmotnost je neoddělitelnou vlastností hmoty v obou jejích formách
Váha tělesa – míra působení tělesa na podložku v důsledku „zemské“ přitažlivosti
– je úměrná jeho hmotnosti m, konstantou úměrnosti je gravitační zrychlení g
Energie – z fyzikálního pohledu neexistuje „obecná definice“ pojmu energie
– má mnoho různých forem – gravitační, kinetická, tepelná, elektrická, elastická, chemická, jaderná, energie vázaná na hmotnost, apod.
– různé druhy energie se mohou navzájem přeměňovat, pro vzájemnou přeměnujednotlivých druhů energií platí přesné vztahy
= .G g m
– základem fyziky je měření, tedy kvalitativní a kvantitativní vyhodnocování veličin, které používáme k popisu fyzikálních vlastností hmoty a jejich změn (délka, čas, hmotnost, energie, teplota, atd.)
– k popisu fyzikální veličiny je třeba stanovit její jednotku, tzn. takovou míru této veličiny, které přisoudímečíselnou hodnotu přesně 1,0
– každá veličina i její jednotka mají kromě názvu také značku
– poté vytvoříme standard, s nímž budeme všechny ostatní hodnoty dané fyzikální veličiny porovnávat
MĚŘENÍ
Příklad:veličina: délka
jednotka: metr
standard: vzdálenost, kterou světlo urazí za 1 / 299 792 458 s– fyzikálních veličin je značné množství, řada z nich ale není navzájem nezávislá ⇒ lze vybrat malý počet
základních veličin a definovat jejich vlastní standardy
ostatní veličiny jsou vyjádřitelné pomocí zvolených veličin základních
– standardy základních veličin musí být dostupné a při opakovaném měření neměnné
PROBLÉMY:– volba měřícího zařízení
– vliv měření na hodnotu měřené veličiny (kvantová mechanika)
Dělení fyzikálních veličin – skalární veličiny (jednorozměrné)
veličiny, kterým nelze přisoudit směr; jsou určeny jediným číslem (velikostí) a při počítání s nimi užívámepravidel běžné algebry; např. hmotnost, energie, tlak, atd.
– vektorové veličiny (dvourozměrné)
veličiny, které mají velikost a směr; práce s vektory se řídí speciálními pravidlynapř. rychlost, zrychlení, síla, atd.
– tenzorové veličiny (vícerozměrné)
veličiny reprezentované vyšším počtem složek (skalár – tenzor 0. řádu, vektor – tenzor 1. řádu)např. tenzor elektrické vodivosti, tenzor napětí, atd.
– extenzivní veličiny (aditivní)veličiny závisející na počtu částic soustavy (tedy látkovém množství, popřípadě hmotnosti)např. hmotnost, energie, rozměry, atd.
– intenzivní veličiny (neaditivní)veličiny na počtu částic v soustavě nezávislénelze je kvantifikovat přímo, je nutné provést nepřímé měření vhodné extenzivní veličinynapř. teplota, tlak, hustota, atd.
– protenzivní veličiny trvale spojitě se vyvíjející veličiny bez možnosti zpětné reprodukce, např. čas
A
a B
Souřadnicové soustavy
Kartézská Sférická Cylindrická
– soustava vzhledem k níž je poloha libovolného bodu v trojrozměrném prostoru jednoznačně určenauspořádanou trojící veličin nazývaných souřadnice
– zavádí se zpravidla tak, že se zvolí její počátek (počáteční bod) O a tři navzájem kolmé orientovanépřímky procházející počátkem O a nazývané osy souřadnic (osy soustavy souřadnic, souřadnicové osy)
– souřadnicové soustavy
Práce s vektory
= +
= + +
2 21 2
2 2 21 2 3
2D:
3D:
u u u
u u u u
velikost vektoru vektorový součet (rozdíl)
( ) ( )( )
( )α
= = = +
= + = + = + +
= + +
1 2 1 2
1 1 2 2
2 2
, ,
,
2 cos
u u u v v v w u v
w u v v u u v u v
w u v uv
Skalární součin
α
α
⋅ = +
⋅ = ⋅ ⋅
⋅ += =
⋅ + + +
1 1 2 2
1 1 2 22 2 2 21 2 1 2
cos
cos
u v u v u v
u v u v
u v u v u vu v u u v v
– skalární součin se definuje mezi dvěma vektory a zachycuje vztah mezi velikostí vektorů a jejich úhlem
Vektorový součin
α= ⋅ ⋅
= × = − − −2 3 2 3 3 1 3 1 1 2 1 2
sin
( , , )
w u v
w u v u v v u u v v u u v v u
u = (4,0,0) a v = (0,5,0), α = 90°
u 0 0 4 0
v 5 0 0 5
u x v 0 0 20
α= = ⋅ ⋅ = ⋅ ⋅ ° =20 sin 4 5 sin90 20w u v
– vektorový součin je operace v prostoru mezi dvěma vektory, která nám dává nový vektor, který je na tyto dva vektory kolmý
MEZINÁRODNÍ JEDNOTKOVÁ SOUSTAVA SI
Základní jednotky SI
molmollátkové množstvícdkandelasvítivostAampérelektrický proudKkelvintermodynamická teplotassekundačaskgkilogramhmotnostmmetrdélkaSymbol Název jednotky Veličina
definice jednotek a uchování etalonů mezinárodně garantuje Bureau International des Poids et Mesures
v Sèvres (Francie)
v České republice garance zajišťuje Český metrologický institut v Brně
soustava sestává ze základních jednotek, odvozených jednotek, předpon a vedlejších jednotek
Základní jednotky SI
Metr [m] je délka dráhy, kterou urazí světlo ve vakuu za 1/299 792 458 s
Kilogram [kg] je hmotnost mezinárodního prototypu kilogramu uloženého u Mezinárodního úřadu pro míry a váhy v Sèvres (Francie)
Sekunda [s] časový interval vymezený 9 192 631 770 kmity elektromagnetického záření, jež vznikáv atomu základního izotopu cesia 133 při změně jeho energetického stavu mezi hladinami F(3,0) a F(4,0) v nulovém magnetickém poli
Kelvin [K] je 1/273,16 termodynamické teploty trojného bodu vody
Ampér [A] je stálý elektrický proud, který při průchodu dvěma přímými rovnoběžnými nekonečnědlouhými vodiči zanedbatelného kruhového průřezu umístěnými ve vakuu ve vzájemnévzdálenosti 1 metr vyvolá mezi nimi stálou sílu 2 . 10-7 N na 1 metr délky vodiče
Kandela [cd] ke svítivost zdroje, který v daném směru emituje monochromatické záření o frekvenci540.1012 Hz, jehož zářivost v tomto směru je 1/683 W na jeden steradián
Mol [mol] je látkové množství, které obsahuje právě tolik elementů, kolik je obsaženo atomů ve 12 g nuklidu uhlíku 12C
K273.15000(30)T0bod tuhnutí vodypřesněPa101 325p0standardní tlak7.6 x 10 -12m -110 973 731.568 549(83) R ∞Rydbergova konstantapřesněF.m -18.854 187 817 ... x 10 -12ε 0 permitivita vakuapřesněN.A -212.566 370 614 ... x 10 -7μ 0 permeabilita vakua1.7 x 10 -6J.mol -1.K -18.314 472(15) R molární plynová konstanta4.0 x 10 -8C.mol -196 485.341 5(39) F Faradayova konstanta7.9 x 10 -8mol -16.022 141 99(47) x 10 23N AAvogadrova konstanta7.9 x 10 -8kg 1.660 538 73(13) x 10 -27u atomová hmotnostní jednotka7.9 x 10 -8kg 9.109 381 88(72) x 10 -31m ehmotnost elektronu7.9 x 10 -8kg 1.672 621 58(13) x 10 -27m phmotnost protonu3.9 x 10 -8C 1.602 176 462(63) x 10 -19e elementární náboj1.7 x 10 -6J.K -11.380 650 3(24) x 10 -23k Boltzmannova konstanta7.8 x 10 -8J.s 6.626 068 76(52) x 10 -34h Planckova konstantapřesněm.s -1299 792 458 c, c 0rychlost světla ve vakuuChyba Jednotka Hodnota Symbol Konstanta
– hmotný bod – myšlený bodový (bezrozměrný) objekt mající hmotnost objektu, který nahrazuje skutečnétěleso v případech, kdy pro popis jeho pohybu nejsou rozhodující jeho vlastní rozměry
– vztažná soustava – souřadnicová soustava vůči které vztahujeme (popisujeme) polohu (pohyb) sledovaného tělesa
– vztažné těleso – zvolené těleso, vzhledem k němuž určujeme polohu jiných těles. Nemění-li se polohanějakého tělesa vzhledem k v.t., je toto těleso vzhledem k v.t. v klidu, pokud se jeho poloha mění, tělesose vzhledem k v.t. pohybuje – koná mechanický pohyb
– inerciální vztažná soustava – vztažná soustava v níž platí první i druhý Newtonův pohybový zákon.Jestliže je soustava S inerciální, potom každá vztažná soustava S‘, která se vzhledem k soustavě S pohybuje konstantní rychlostí (a to tak, že její osy mají vzhledem k osám soustavy S konstantní směr), je také inerciální
– neinerciální vztažná soustava – vztažná soustava, která není inerciální, neplatí v ní tedy první i druhýNewtonův pohybový zákon. Je to jakákoliv vztažná soustava S‘, jejíž počátek O‘ se vzhledem k zvolenéinerciální soustavě S pohybuje s nenulovým zrychlením nebo jejíž osy souřadnic se vzhledem k osám soustavy S otáčejí (případně koná-li soustava S‘ vůči soustavě S oba tyto pohyby)
– Galileiův princip relativity – všechny inerciální vztažné soustavy jsou rovnocenné, neboť mechanický pohyb těles vzhledem ke každé z nich se řídí týmiž zákony, a to Newtonovými pohybovými zákony)
– Einsteinův princip relativity – speciální – všechny inerciální vztažné soustavy jsou pro popis všech fyzikálních dějů rovnocenné; obecný – všechny vztažné soustavy jsou pro popis všech fyzikálních dějůrovnocenné
MECHANIKA – KINEMATIKA HMOTNÉHO BODU
– poloha hmotného bodu – polohu objektu určujeme vždy vzhledem k nějakému vztažnému bodu,obvykle počátku souřadnicové osy (soustavy); za kladný směr osy považujeme směr rostoucísouřadnice, opačný směr nazýváme záporný
– změnu polohy objektu, např. z bodu o souřadnici x1 do bodu o souřadnici x2, nazýváme posunutím a značíme Δx (vektorová veličina)
– trajektorie (dráha) hmotného bodu – křivka po níž se hmotný bod pohybuje (souhrn všech poloh jimižhmotný bod v průběhu pohybu prošel)
přímočarý pohyb – pohyb hmotného bodu po přímce
křivočarý pohyb – pohyb hmotného bodu po obecné křivce
rovinný pohyb – pohyb hmotného bodu po rovinné křivce, např. pohyb po kružnici
Δ = −2 1x x x
– polohový vektor – vektor vedený ze zvoleného počátku (počátečního bodu) O, pevně spojeného se vztažným tělesem (soustavou) do bodu, jehož polohu určuje; značí se r
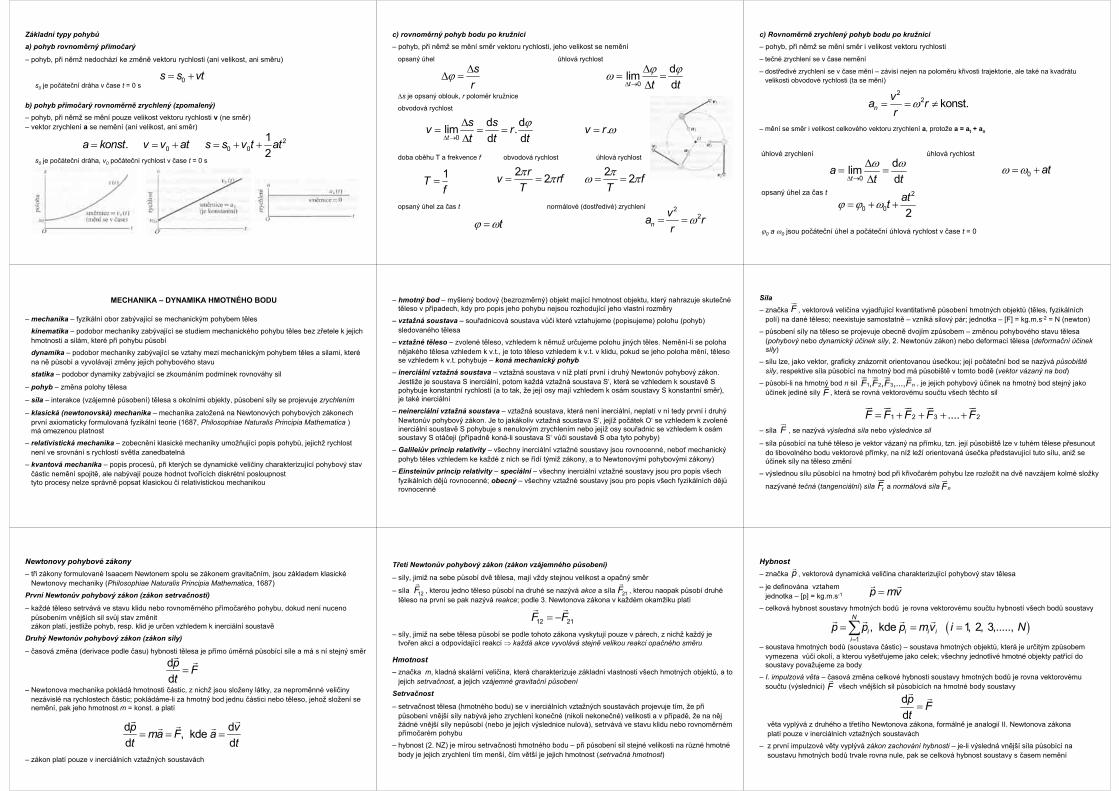
Rychlost pohybu hmotného bodu – průměrná rychlost – veličina definovaná jako podíl posunutí Δx v určitém časovém intervalu Δt (skalár)
Δ −= =
Δ −2 1
2 1x
x x xvt t t
Rychlost pohybu hmotného bodu – okamžitá rychlost – okamžitou rychlost získáme
z průměrné rychlosti tak, že budeme časový intervalΔt, měřený od okamžiku t, zmenšovat bez omezeník nule. S poklesem hodnoty Δt se průměrná rychlost měřená v intervalu od t do t + Δt blíží jisté limitníhodnotě, která pak definuje rychlost v okamžiku t(vektorová veličina)
– plošná rychlost – vektorová veličina definovanávztahem
kde S je velikost elementární plochy opsanépolohovým vektorem
Δ →
Δ= =
Δ0
dlimdx t
x xvt t
=ddxSvt
×=
dd2
r rS
Derivace – matematická operace vyjadřující míru změny nějaké veličiny v závislosti na veličině jiné
obecně:
d d, , atd.d dt x
Δ →
Δ= =
Δ0
dlimdx t
x xvt t
Zrychlený pohyb hmotného bodu – pohyb, při kterém dochází ke změně vektoru rychlosti
průměrné zrychlení okamžité zrychlení
Δ −= =
Δ −2 1
2 1
x x xx
v v vat t t
⎛ ⎞= = =⎜ ⎟⎝ ⎠
2
2
d d d dd d d d
xx
v x xat t t t
– tečné (tangenciální) zrychlení at – vektor zrychlení je promítnut do tečny k trajektorii pohybu
– normálové zrychlení an – vektor je orientován do směru hlavní normály k trajektorii (do středu křivosti)
= + = =2d
dt n t nv va a a a at R
R je poloměr křivosti
⇒ změna rychlosti závisí pouze na tečném zrychlení, změna směru rychlosti závisí pouze na zrychlenínormálovém !!!
Základní typy pohybůa) pohyb rovnoměrný přímočarý
– pohyb, při němž nedochází ke změně vektoru rychlosti (ani velikost, ani směru)
s0 je počáteční dráha v čase t = 0 s= +0s s vt
b) pohyb přímočarý rovnoměrně zrychlený (zpomalený)– pohyb, při němž se mění pouze velikost vektoru rychlosti v (ne směr)– vektor zrychlení a se nemění (ani velikost, ani směr)
s0 je počáteční dráha, v0 počáteční rychlost v čase t = 0 s
= = + = + + 20 0 0
1. 2
a konst v v at s s v t at
c) rovnoměrný pohyb bodu po kružnici– pohyb, při němž se mění směr vektoru rychlosti, jeho velikost se nemění
opsaný úhel úhlová rychlost
Δs je opsaný oblouk, r poloměr kružnice
obvodová rychlost
doba oběhu T a frekvence f obvodová rychlost úhlová rychlost
opsaný úhel za čas t normálové (dostředivé) zrychlení
ϕ ΔΔ =
sr
ϕ ϕωΔ →
Δ= =
Δ0
dlimdt t t
ϕ ωΔ →
Δ= = = =
Δ0
d dlim . .d dt
s sv r v rt t t
=1Tf
π π= =2 2rv rfT
πω π= =2 2 fT
ϕ ω= t ω= =2
2n
va rr
c) Rovnoměrně zrychlený pohyb bodu po kružnici– pohyb, při němž se mění směr i velikost vektoru rychlosti
– tečné zrychlení se v čase nemění
– dostředivé zrychlení se v čase mění – závisí nejen na poloměru křivosti trajektorie, ale také na kvadrátuvelikosti obvodové rychlosti (ta se mění)
– mění se směr i velikost celkového vektoru zrychlení a, protože a = at + an
úhlové zrychlení úhlová rychlost
opsaný úhel za čas t
ϕ0 a ω0 jsou počáteční úhel a počáteční úhlová rychlost v čase t = 0
ω= = ≠2
2 konst.nva rr
ω ωΔ →
Δ= =
Δ0
dlimdt
at t
ω ω= +0 at
ϕ ϕ ω= + +2
0 0 2att
– mechanika – fyzikální obor zabývající se mechanickým pohybem těles
kinematika – podobor mechaniky zabývající se studiem mechanického pohybu těles bez zřetele k jejichhmotnosti a silám, které při pohybu působí
dynamika – podobor mechaniky zabývající se vztahy mezi mechanickým pohybem těles a silami, kteréna ně působí a vyvolávají změny jejich pohybového stavu
statika – podobor dynamiky zabývající se zkoumáním podmínek rovnováhy sil
– pohyb – změna polohy tělesa
– síla – interakce (vzájemné působení) tělesa s okolními objekty, působení síly se projevuje zrychlením
– klasická (newtonovská) mechanika – mechanika založená na Newtonových pohybových zákonechprvní axiomaticky formulovaná fyzikální teorie (1687, Philosophiae Naturalis Principia Mathematica )má omezenou platnost
– relativistická mechanika – zobecnění klasické mechaniky umožňující popis pohybů, jejichž rychlostnení ve srovnání s rychlostí světla zanedbatelná
– kvantová mechanika – popis procesů, při kterých se dynamické veličiny charakterizující pohybový stav částic nemění spojitě, ale nabývají pouze hodnot tvořících diskrétní posloupnosttyto procesy nelze správně popsat klasickou či relativistickou mechanikou
MECHANIKA – DYNAMIKA HMOTNÉHO BODU – hmotný bod – myšlený bodový (bezrozměrný) objekt mající hmotnost objektu, který nahrazuje skutečnétěleso v případech, kdy pro popis jeho pohybu nejsou rozhodující jeho vlastní rozměry
– vztažná soustava – souřadnicová soustava vůči které vztahujeme (popisujeme) polohu (pohyb) sledovaného tělesa
– vztažné těleso – zvolené těleso, vzhledem k němuž určujeme polohu jiných těles. Nemění-li se polohanějakého tělesa vzhledem k v.t., je toto těleso vzhledem k v.t. v klidu, pokud se jeho poloha mění, tělesose vzhledem k v.t. pohybuje – koná mechanický pohyb
– inerciální vztažná soustava – vztažná soustava v níž platí první i druhý Newtonův pohybový zákon.Jestliže je soustava S inerciální, potom každá vztažná soustava S‘, která se vzhledem k soustavě S pohybuje konstantní rychlostí (a to tak, že její osy mají vzhledem k osám soustavy S konstantní směr), je také inerciální
– neinerciální vztažná soustava – vztažná soustava, která není inerciální, neplatí v ní tedy první i druhýNewtonův pohybový zákon. Je to jakákoliv vztažná soustava S‘, jejíž počátek O‘ se vzhledem k zvolenéinerciální soustavě S pohybuje s nenulovým zrychlením nebo jejíž osy souřadnic se vzhledem k osám soustavy S otáčejí (případně koná-li soustava S‘ vůči soustavě S oba tyto pohyby)
– Galileiův princip relativity – všechny inerciální vztažné soustavy jsou rovnocenné, neboť mechanický pohyb těles vzhledem ke každé z nich se řídí týmiž zákony, a to Newtonovými pohybovými zákony)
– Einsteinův princip relativity – speciální – všechny inerciální vztažné soustavy jsou pro popis všech fyzikálních dějů rovnocenné; obecný – všechny vztažné soustavy jsou pro popis všech fyzikálních dějůrovnocenné
Síla– značka , vektorová veličina vyjadřující kvantitativně působení hmotných objektů (těles, fyzikálních
polí) na dané těleso; neexistuje samostatně – vzniká silový pár; jednotka – [F] = kg.m.s-2 = N (newton)
– působení síly na těleso se projevuje obecně dvojím způsobem – změnou pohybového stavu tělesa(pohybový nebo dynamický účinek síly, 2. Newtonův zákon) nebo deformací tělesa (deformační účineksíly)
– sílu lze, jako vektor, graficky znázornit orientovanou úsečkou; její počáteční bod se nazývá působištěsíly, respektive síla působící na hmotný bod má působiště v tomto bodě (vektor vázaný na bod)
– působí-li na hmotný bod n sil , je jejich pohybový účinek na hmotný bod stejný jakoúčinek jediné síly , která se rovná vektorovému součtu všech těchto sil
– síla , se nazývá výsledná síla nebo výslednice sil
– síla působící na tuhé těleso je vektor vázaný na přímku, tzn. její působiště lze v tuhém tělese přesunoutdo libovolného bodu vektorové přímky, na níž leží orientovaná úsečka představující tuto sílu, aniž seúčinek síly na těleso změní
– výslednou sílu působící na hmotný bod při křivočarém pohybu lze rozložit na dvě navzájem kolmé složky
nazývané tečná (tangenciální) síla a normálová síla
F
= + + + +1 2 3 2.... F F F F F
1 2 3, , ,..., nF F F FF
F
tF nF
Newtonovy pohybové zákony– tři zákony formulované Isaacem Newtonem spolu se zákonem gravitačním, jsou základem klasické
Newtonovy mechaniky (Philosophiae Naturalis Principia Mathematica, 1687)
První Newtonův pohybový zákon (zákon setrvačnosti)
– každé těleso setrvává ve stavu klidu nebo rovnoměrného přímočarého pohybu, dokud není nuceno působením vnějších sil svůj stav změnitzákon platí, jestliže pohyb, resp. klid je určen vzhledem k inerciální soustavě
Druhý Newtonův pohybový zákon (zákon síly)
– časová změna (derivace podle času) hybnosti tělesa je přímo úměrná působící síle a má s ní stejný směr
– Newtonova mechanika pokládá hmotnosti částic, z nichž jsou složeny látky, za neproměnné veličinynezávislé na rychlostech částic; pokládáme-li za hmotný bod jednu částici nebo těleso, jehož složení se nemění, pak jeho hmotnost m = konst. a platí
– zákon platí pouze v inerciálních vztažných soustavách
=ddp Ft
= = =d d, kde d dp vma F at t
Třetí Newtonův pohybový zákon (zákon vzájemného působení)
– síly, jimiž na sebe působí dvě tělesa, mají vždy stejnou velikost a opačný směr
– síla , kterou jedno těleso působí na druhé se nazývá akce a síla , kterou naopak působí druhétěleso na první se pak nazývá reakce; podle 3. Newtonova zákona v každém okamžiku platí
– síly, jimiž na sebe tělesa působí se podle tohoto zákona vyskytují pouze v párech, z nichž každý je tvořen akcí a odpovídající reakcí ⇒ každá akce vyvolává stejně velikou reakci opačného směru
= −12 21F F
12F 21F
Hmotnost– značka m, kladná skalární veličina, která charakterizuje základní vlastnosti všech hmotných objektů, a to
jejich setrvačnost, a jejich vzájemné gravitační působení
Setrvačnost
– setrvačnost tělesa (hmotného bodu) se v inerciálních vztažných soustavách projevuje tím, že při působení vnější síly nabývá jeho zrychlení konečné (nikoli nekonečné) velikosti a v případě, že na něj žádné vnější síly nepůsobí (nebo je jejich výslednice nulová), setrvává ve stavu klidu nebo rovnoměrném přímočarém pohybu
– hybnost (2. NZ) je mírou setrvačnosti hmotného bodu – při působení sil stejné velikosti na různé hmotnébody je jejich zrychlení tím menší, čím větší je jejich hmotnost (setrvačná hmotnost)
Hybnost– značka , vektorová dynamická veličina charakterizující pohybový stav tělesa
– je definována vztahem jednotka – [p] = kg.m.s-1
– celková hybnost soustavy hmotných bodů je rovna vektorovému součtu hybností všech bodů soustavy
– soustava hmotných bodů (soustava částic) – soustava hmotných objektů, která je určitým způsobem vymezena vůči okolí, a kterou vyšetřujeme jako celek; všechny jednotlivé hmotné objekty patřící dosoustavy považujeme za body
– I. impulzová věta – časová změna celkové hybnosti soustavy hmotných bodů je rovna vektorovémusoučtu (výslednici) všech vnějších sil působících na hmotné body soustavy
věta vyplývá z druhého a třetího Newtonova zákona, formálně je analogií II. Newtonova zákona platí pouze v inerciálních vztažných soustavách
– z první impulzové věty vyplývá zákon zachování hybnosti – je-li výsledná vnější síla působící na soustavu hmotných bodů trvale rovna nule, pak se celková hybnost soustavy s časem nemění
p
F
( )=
= = =∑1
, kde 1, 2, 3,....., N
i i i ii
p p p mv i N
= p mv
=ddp Ft
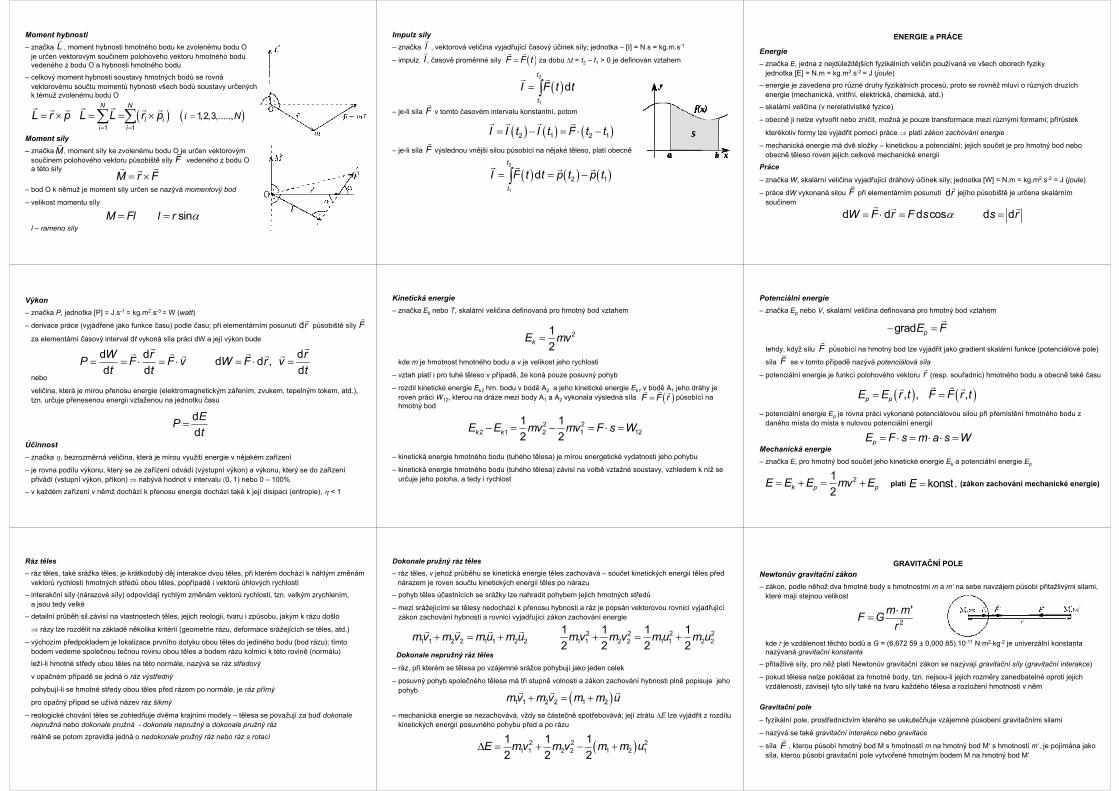
Moment hybnosti– značka , moment hybnosti hmotného bodu ke zvolenému bodu O
je určen vektorovým součinem polohového vektoru hmotného boduvedeného z bodu O a hybnosti hmotného bodu
– celkový moment hybnosti soustavy hmotných bodů se rovnávektorovému součtu momentů hybnosti všech bodů soustavy určenýchk témuž zvolenému bodu O
Moment síly– značka , moment síly ke zvolenému bodu O je určen vektorovým
součinem polohového vektoru působiště síly vedeného z bodu Oa této síly
– bod O k němuž je moment síly určen se nazývá momentový bod
– impulz , časově proměnné síly za dobu Δt = t2 – t1 > 0 je definován vztahem
– je-li síla v tomto časovém intervalu konstantní, potom
– je-li síla výslednou vnější silou působící na nějaké těleso, platí obecně
I
( )= ∫2
1
dt
t
I F t t
( )=F F tI
F
( ) ( ) ( )= − = ⋅ −2 1 2 1I I t I t F t tF
( ) ( ) ( )= = −∫2
1
2 1dt
t
I F t t p t p t
ENERGIE a PRÁCE
Energie– značka E, jedna z nejdůležitějších fyzikálních veličin používaná ve všech oborech fyziky
jednotka [E] = N.m = kg.m2.s-2 = J (joule)
– energie je zavedena pro různé druhy fyzikálních procesů, proto se rovněž mluví o různých druzíchenergie (mechanická, vnitřní, elektrická, chemická, atd.)
– skalární veličina (v nerelativistiké fyzice)
– obecně ji nelze vytvořit nebo zničit, možná je pouze transformace mezi různými formami; přírůstek
kterékoliv formy lze vyjádřit pomocí práce ⇒ platí zákon zachování energie
– mechanická energie má dvě složky – kinetickou a potenciální; jejich součet je pro hmotný bod neboobecně těleso roven jejich celkové mechanické energii
– práce dW vykonaná silou při elementárním posunutí jejího působiště je určena skalárnímsoučinem
F dr
α= ⋅ = =d d d cos d dW F r F s s r
Výkon– značka P, jednotka [P] = J.s-1 = kg.m2.s-3 = W (watt)
– derivace práce (vyjádřené jako funkce času) podle času; při elementárním posunutí působiště síly
za elementární časový interval dt vykoná síla práci dW a její výkon bude
nebo
veličina, která je mírou přenosu energie (elektromagnetickým zářením, zvukem, tepelným tokem, atd.),tzn. určuje přenesenou energii vztaženou na jednotku času
= = ⋅ = ⋅ = ⋅ =d d d d d , d d dW r rP F F v W F r vt t t
Fdr
=ddEPt
Účinnost– značka η, bezrozměrná veličina, která je mírou využití energie v nějakém zařízení
– je rovna podílu výkonu, který se ze zařízení odvádí (výstupní výkon) a výkonu, který se do zařízenípřivádí (vstupní výkon, příkon) ⇒ nabývá hodnot v intervalu ⟨0, 1) nebo 0 – 100%
– v každém zařízení v němž dochází k přenosu energie dochází také k její disipaci (entropie), η < 1
Kinetická energie– značka Ek nebo T, skalární veličina definovaná pro hmotný bod vztahem
kde m je hmotnost hmotného bodu a v je velikost jeho rychlosti
– vztah platí i pro tuhé těleso v případě, že koná pouze posuvný pohyb
– rozdíl kinetické energie Ek2 hm. bodu v bodě A2 a jeho kinetické energie Ek1 v bodě A1 jeho dráhy jeroven práci W12, kterou na dráze mezi body A1 a A2 vykonala výsledná síla působící na hmotný bod
– kinetická energie hmotného bodu (tuhého tělesa) je mírou energetické vydatnosti jeho pohybu
– kinetická energie hmotného bodu (tuhého tělesa) závisí na volbě vztažné soustavy, vzhledem k níž seurčuje jeho poloha, a tedy i rychlost
( )=F F r
= 212kE mv
− = − = ⋅ =2 22 1 2 1 12
1 12 2k kE E mv mv F s W
Potenciální energie– značka Ep nebo V, skalární veličina definovaná pro hmotný bod vztahem
tehdy, když sílu působící na hmotný bod lze vyjádřit jako gradient skalární funkce (potenciálové pole)
síla se v tomto případě nazývá potenciálová síla
– potenciální energie je funkcí polohového vektoru (resp. souřadnic) hmotného bodu a obecně také času
– potenciální energie Ep je rovna práci vykonané potenciálovou silou při přemístění hmotného bodu z daného místa do místa s nulovou potenciální energií
Mechanická energie– značka E, pro hmotný bod součet jeho kinetické energie Ek a potenciální energie Ep
platí (zákon zachování mechanické energie)
( ) ( )= =, , ,p pE E r t F F r t
− =grad pE F
= ⋅ = ⋅ ⋅ =pE F s m a s W
FF
r
= + = +212k p pE E E mv E = konst.E
Ráz těles– ráz těles, také srážka těles, je krátkodobý děj interakce dvou těles, při kterém dochází k náhlým změnám
vektorů rychlostí hmotných středů obou těles, popřípadě i vektorů úhlových rychlostí
– interakční síly (nárazové síly) odpovídají rychlým změnám vektorů rychlosti, tzn. velkým zrychlením,a jsou tedy velké
– detailní průběh sil závisí na vlastnostech těles, jejich reologii, tvaru i způsobu, jakým k rázu došlo
⇒ rázy lze rozdělit na základě několika kritérií (geometrie rázu, deformace srážejících se těles, atd.)
– výchozím předpokladem je lokalizace prvního dotyku obou těles do jediného bodu (bod rázu); tímto bodem vedeme společnou tečnou rovinu obou těles a bodem rázu kolmici k této rovině (normálu)
leží-li hmotné středy obou těles na této normále, nazývá se ráz středový
v opačném případě se jedná o ráz výstředný
pohybují-li se hmotné středy obou těles před rázem po normále, je ráz přímý
pro opačný případ se užívá název ráz šikmý
– reologické chování těles se zohledňuje dvěma krajními modely – tělesa se považují za buď dokonalenepružná nebo dokonale pružná - dokonale nepružný a dokonale pružný ráz
reálně se potom zpravidla jedná o nedokonale pružný ráz nebo ráz s rotací
Dokonale pružný ráz těles– ráz těles, v jehož průběhu se kinetická energie těles zachovává – součet kinetických energií těles před
nárazem je roven součtu kinetických energií těles po nárazu
– pohyb těles účastnících se srážky lze nahradit pohybem jejich hmotných středů
– mezi srážejícími se tělesy nedochází k přenosu hybnosti a ráz je popsán vektorovou rovnicí vyjadřujícízákon zachování hybnosti a rovnicí vyjadřující zákon zachování energie
Dokonale nepružný ráz těles
– ráz, při kterém se tělesa po vzájemné srážce pohybují jako jeden celek
– posuvný pohyb společného tělesa má tři stupně volnosti a zákon zachování hybnosti plně popisuje jeho pohyb
– mechanická energie se nezachovává, vždy se částečně spotřebovává; její ztrátu ΔE lze vyjádřit z rozdílu kinetických energií posuvného pohybu před a po rázu
+ = + + = +2 2 2 21 1 2 2 1 1 2 2 1 1 2 2 1 1 2 2
1 1 1 1 2 2 2 2
mv m v mu m u mv m v mu m u
( )+ = +1 1 2 2 1 2mv m v m m u
( )Δ = + − +2 2 21 1 2 2 1 2 1
1 1 12 2 2
E mv m v m m u
GRAVITAČNÍ POLENewtonův gravitační zákon– zákon, podle něhož dva hmotné body s hmotnostmi m a m‘ na sebe navzájem působí přitažlivými silami,
které mají stejnou velikost
kde r je vzdálenost těchto bodů a G = (6,672 59 ± 0,000 85).10-11 N·m2·kg-2 je univerzální konstantanazývaná gravitační konstanta
– přitažlivé síly, pro něž platí Newtonův gravitační zákon se nazývají gravitační síly (gravitační interakce)
– pokud tělesa nelze pokládat za hmotné body, tzn. nejsou-li jejich rozměry zanedbatelné oproti jejichvzdálenosti, závisejí tyto síly také na tvaru každého tělesa a rozložení hmotnosti v něm
Gravitační pole
– fyzikální pole, prostřednictvím kterého se uskutečňuje vzájemné působení gravitačními silami
– nazývá se také gravitační interakce nebo gravitace
– síla , kterou působí hmotný bod M s hmotností m na hmotný bod M‘ s hmotností m‘, je pojímána jakosíla, kterou působí gravitační pole vytvořené hmotným bodem M na hmotný bod M‘
Gravitační potenciál– skalární veličina lokálně charakterizující gravitační pole
tyto vztahy platí i pro potenciál gravitačního pole tělesa kulového tvaru se středově souměrnýmrozložením hmotnosti o poloměru R pro r ≥ R (např. Země)
Tíha (tíhová síla)
– značka nebo , tíha tělesa v dané vztažné soustavě je síla, která by tomuto tělesu udělovala (přiabsenci jiných sil) zrychlení rovnající se místnímu zrychlení volného pádu v této vztažné soustavě
– dříve se běžně nazývala váha
– je-li těleso ve vakuu podepřeno nebo zavěšeno tak, že je vzhledem k vztažnému tělesu v klidu, působína něj podpěra nebo závěs silou , která je s tíhou v rovnováze
= = − = − a gradpE mU G K Um r
gF G
= ⋅GF m g
− GF
Tíha na Zemi
– tíha tělesa na Zemi je výslednicí působení gravitační síly a odstředivé síly vyvolané rotací Země
tíhové zrychlení g je závislé na zeměpisné šířce a nadmořské výšce
normální tíhové zrychlení: gn = 9,80665 m.s-2
ω= + = ⋅ + = ⋅2G g s gF F F m a m r m g
ϕ= + + 2 cosG g s g sF F F F F
ω ϕ= = 22 cosZ
g s ZZ
M mF G F RR
Beztížný stav– stav tělesa v neinerciální vztažné soustavě, vzhledem k níž je v klidu, který nastává, působí-li ostatní
tělesa na něj pouze gravitačními silami a jejich výslednice je v rovnováze s výslednicí všech setrvačnýchsil působících na toto těleso v dané neinerciální soustavě
– zrychlení volného pádu tělesa vzhledem k takovéto vztažné soustavě, a tedy i jeho tíha v této soustavějsou rovny nule
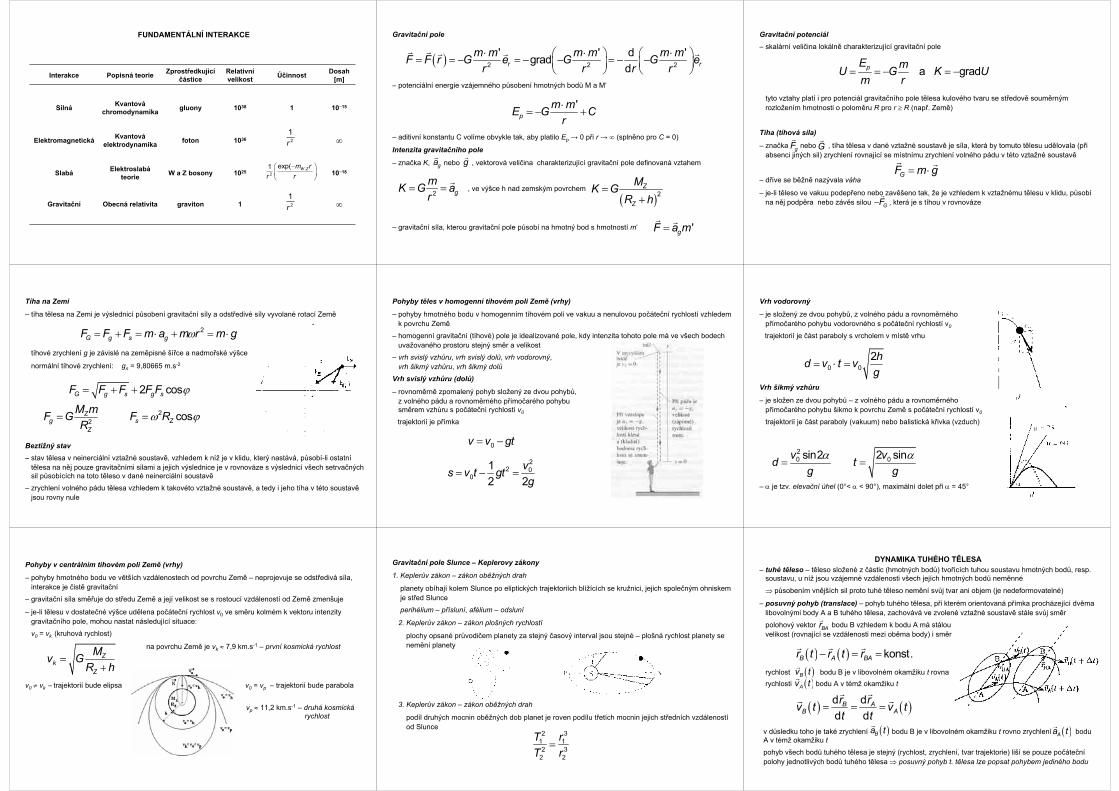
Pohyby těles v homogenní tíhovém poli Země (vrhy)
– pohyby hmotného bodu v homogenním tíhovém poli ve vakuu a nenulovou počáteční rychlostí vzhledemk povrchu Země
– homogenní gravitační (tíhové) pole je idealizované pole, kdy intenzita tohoto pole má ve všech bodechuvažovaného prostoru stejný směr a velikost
– vrh svislý vzhůru, vrh svislý dolů, vrh vodorovný, vrh šikmý vzhůru, vrh šikmý dolů
Vrh svislý vzhůru (dolů)
– rovnoměrně zpomalený pohyb složený ze dvou pohybů,z volného pádu a rovnoměrného přímočarého pohybusměrem vzhůru s počáteční rychlostí v0
trajektorií je přímka
= −
= − =
0
22 0
012 2
v v gt
vs v t gtg
Vrh vodorovný
– je složený ze dvou pohybů, z volného pádu a rovnoměrného přímočarého pohybu vodorovného s počáteční rychlostí v0
trajektorií je část paraboly s vrcholem v místě vrhu
Vrh šikmý vzhůru
– je složen ze dvou pohybů – z volného pádu a rovnoměrnéhopřímočarého pohybu šikmo k povrchu Země s počáteční rychlostí v0
trajektorií je část paraboly (vakuum) nebo balistická křivka (vzduch)
– α je tzv. elevační úhel (0°< α < 90°), maximální dolet při α = 45°
= ⋅ =0 02 hd v t vg
α α= =
20 0sin2 2 sin v vd t
g g
Pohyby v centrálním tíhovém poli Země (vrhy)
– pohyby hmotného bodu ve větších vzdálenostech od povrchu Země – neprojevuje se odstředivá síla,interakce je čistě gravitační
– gravitační síla směřuje do středu Země a její velikost se s rostoucí vzdáleností od Země zmenšuje
– je-li tělesu v dostatečné výšce udělena počáteční rychlost v0 ve směru kolmém k vektoru intenzity gravitačního pole, mohou nastat následující situace:
v0 = vk (kruhová rychlost)
na povrchu Země je vk ≈ 7,9 km.s-1 – první kosmická rychlost
v0 ≠ vk – trajektorií bude elipsa v0 = vp – trajektorií bude parabola
vp ≈ 11,2 km.s-1 – druhá kosmickárychlost
=+
Zk
Z
Mv GR h
Gravitační pole Slunce – Keplerovy zákony
1. Keplerův zákon – zákon oběžných drah
planety obíhají kolem Slunce po eliptických trajektoriích blížících se kružnici, jejich společným ohniskem je střed Slunce
perihélium – přísluní, afélium – odsluní
2. Keplerův zákon – zákon plošných rychlostí
plochy opsané průvodičem planety za stejný časový interval jsou stejné – plošná rychlost planety se nemění planety
3. Keplerův zákon – zákon oběžných drah
podíl druhých mocnin oběžných dob planet je roven podílu třetích mocnin jejich středních vzdálenostíod Slunce
=2 3
1 12 3
2 2
T rT r
– tuhé těleso – těleso složené z částic (hmotných bodů) tvořících tuhou soustavu hmotných bodů, resp.soustavu, u níž jsou vzájemné vzdálenosti všech jejích hmotných bodů neměnné
⇒ působením vnějších sil proto tuhé těleso nemění svůj tvar ani objem (je nedeformovatelné)
– posuvný pohyb (translace) – pohyb tuhého tělesa, při kterém orientovaná přímka procházející dvěma libovolnými body A a B tuhého tělesa, zachovává ve zvolené vztažné soustavě stále svůj směr
polohový vektor bodu B vzhledem k bodu A má stálou velikost (rovnající se vzdálenosti mezi oběma body) i směr
rychlost bodu B je v libovolném okamžiku t rovnarychlosti bodu A v témž okamžiku t
v důsledku toho je také zrychlení bodu B je v libovolném okamžiku t rovno zrychlení bodu A v témž okamžiku t
pohyb všech bodů tuhého tělesa je stejný (rychlost, zrychlení, tvar trajektorie) liší se pouze počátečnípolohy jednotlivých bodů tuhého tělesa ⇒ posuvný pohyb t. tělesa lze popsat pohybem jediného bodu
DYNAMIKA TUHÉHO TĚLESA
( ) ( )− = = konst.B A BAr t r t r
( ) ( )= = =d dd d
B AB A
r rv t v tt t
( )Bv t( )Av t
( )Ba t ( )Aa t
BAr
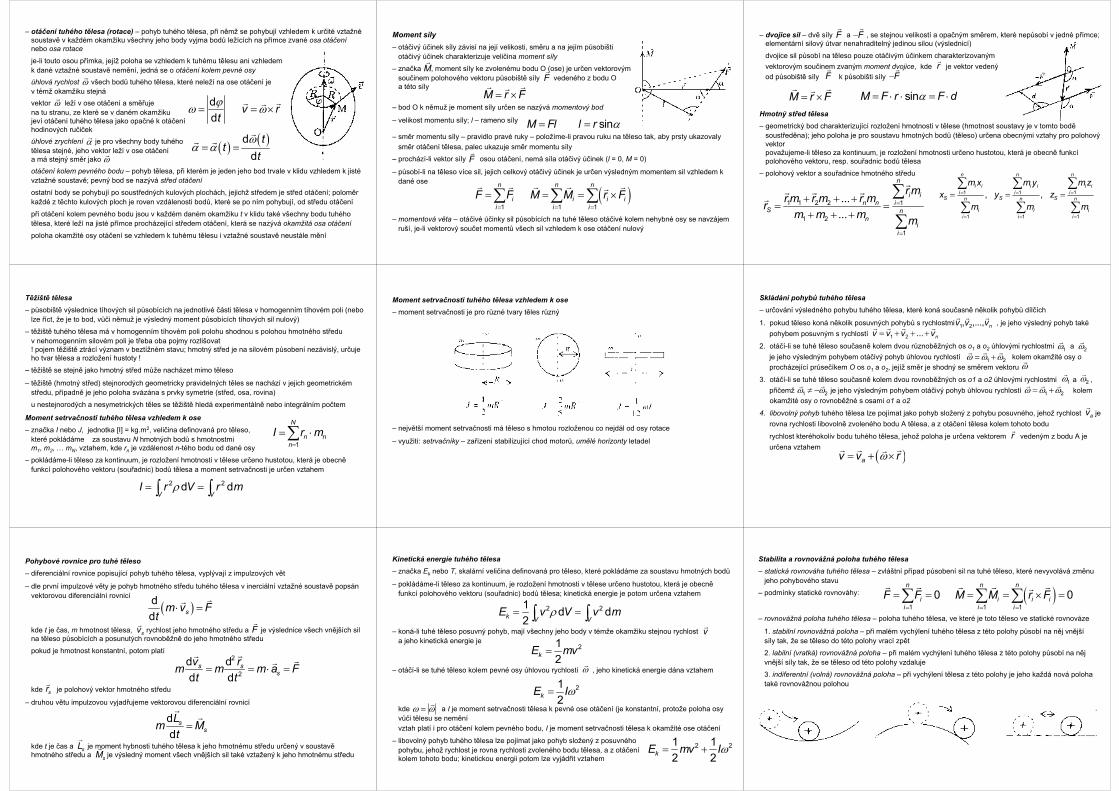
– otáčení tuhého tělesa (rotace) – pohyb tuhého tělesa, při němž se pohybují vzhledem k určité vztažnésoustavě v každém okamžiku všechny jeho body vyjma bodů ležících na přímce zvané osa otáčenínebo osa rotace
je-li touto osou přímka, jejíž poloha se vzhledem k tuhému tělesu ani vzhledem k dané vztažné soustavě nemění, jedná se o otáčení kolem pevné osyúhlová rychlost všech bodů tuhého tělesa, které neleží na ose otáčení je v témž okamžiku stejnávektor leží v ose otáčení a směřujena tu stranu, ze které se v daném okamžikujeví otáčení tuhého tělesa jako opačné k otáčeníhodinových ručičekúhlové zrychlení je pro všechny body tuhého tělesa stejné, jeho vektor leží v ose otáčenía má stejný směr jakootáčení kolem pevného bodu – pohyb tělesa, při kterém je jeden jeho bod trvale v klidu vzhledem k jistévztažné soustavě; pevný bod se nazývá střed otáčení
ostatní body se pohybují po soustředných kulových plochách, jejichž středem je střed otáčení; poloměrkaždé z těchto kulových ploch je roven vzdálenosti bodů, které se po ním pohybují, od středu otáčení
při otáčení kolem pevného bodu jsou v každém daném okamžiku t v klidu také všechny bodu tuhého tělesa, které leží na jisté přímce procházející středem otáčení, která se nazývá okamžitá osa otáčení
poloha okamžité osy otáčení se vzhledem k tuhému tělesu i vztažné soustavě neustále mění
ϕω ω= = ×d d
v rt
ω
ω
( ) ( )ωα α= =
dd
tt
tα
ω F
Moment síly– otáčivý účinek síly závisí na její velikosti, směru a na jejím působišti
otáčivý účinek charakterizuje veličina moment síly
– značka , moment síly ke zvolenému bodu O (ose) je určen vektorovým součinem polohového vektoru působiště síly vedeného z bodu Oa této síly
– bod O k němuž je moment síly určen se nazývá momentový bod
– velikost momentu síly; l – rameno síly
– směr momentu síly – pravidlo pravé ruky – položíme-li pravou ruku na těleso tak, aby prsty ukazovaly směr otáčení tělesa, palec ukazuje směr momentu síly
– prochází-li vektor síly osou otáčení, nemá síla otáčivý účinek (l = 0, M = 0)
– působí-li na těleso více sil, jejich celkový otáčivý účinek je určen výsledným momentem sil vzhledem k dané ose
– momentová věta – otáčivé účinky sil působících na tuhé těleso otáčivé kolem nehybné osy se navzájemruší, je-li vektorový součet momentů všech sil vzhledem k ose otáčení nulový
MF
= ×M r F
α= = sinM Fl l r
( )= = =
= = = ×∑ ∑ ∑1 1 1
n n n
i i i ii i i
F F M M r F
Hmotný střed tělesa – geometrický bod charakterizující rozložení hmotnosti v tělese (hmotnost soustavy je v tomto bodě
soustředěna); jeho poloha je pro soustavu hmotných bodů (těleso) určena obecnými vztahy pro polohovývektorpovažujeme-li těleso za kontinuum, je rozložení hmotnosti určeno hustotou, která je obecně funkcípolohového vektoru, resp. souřadnic bodů tělesa
– polohový vektor a souřadnice hmotného středu
– dvojice sil – dvě síly a , se stejnou velikostí a opačným směrem, které nepůsobí v jedné přímce; elementární silový útvar nenahraditelný jedinou silou (výslednicí)
dvojice sil působí na těleso pouze otáčivým účinkem charakterizovaným vektorovým součinem zvaným moment dvojice, kde je vektor vedený od působiště síly k působišti síly
−FF
= ×M r F
F −Fr
α= ⋅ ⋅ = ⋅sinM F r F d
=
=
+ + += =
+ + +
∑
∑1 1 2 2 1
1 2
1
......
n
i in n i
S nn
ii
r mr m r m r mr
m m m m
= = =
= = =
= = =∑ ∑ ∑
∑ ∑ ∑1 1 1
1 1 1
, ,
n n n
i i i i i ii i i
S S Sn n n
i i ii i i
m x m y m zx y z
m m m
Těžiště tělesa – působiště výslednice tíhových sil působících na jednotlivé části tělesa v homogenním tíhovém poli (nebo
lze říct, že je to bod, vůči němuž je výsledný moment působících tíhových sil nulový)
– těžiště tuhého tělesa má v homogenním tíhovém poli polohu shodnou s polohou hmotného středuv nehomogenním silovém poli je třeba oba pojmy rozlišovat! pojem těžiště ztrácí význam v beztížném stavu; hmotný střed je na silovém působení nezávislý, určujeho tvar tělesa a rozložení hustoty !
– těžiště se stejně jako hmotný střed může nacházet mimo těleso
– těžiště (hmotný střed) stejnorodých geometricky pravidelných těles se nachází v jejich geometrickémstředu, případně je jeho poloha svázána s prvky symetrie (střed, osa, rovina)
u nestejnorodých a nesymetrických těles se těžiště hledá experimentálně nebo integrálním počtem
Moment setrvačnosti tuhého tělesa vzhledem k ose– značka I nebo J, jednotka [I] = kg.m2, veličina definovaná pro těleso,
které pokládáme za soustavu N hmotných bodů s hmotnostmi m1, m2, … mN, vztahem, kde rn je vzdálenost n-tého bodu od dané osy
– pokládáme-li těleso za kontinuum, je rozložení hmotnosti v tělese určeno hustotou, která je obecněfunkcí polohového vektoru (souřadnic) bodů tělesa a moment setrvačnosti je určen vztahem
=
= ⋅∑1
N
n nn
I r m
ρ= =∫ ∫2 2d dV V
I r V r m
Moment setrvačnosti tuhého tělesa vzhledem k ose– moment setrvačnosti je pro různé tvary těles různý
– největší moment setrvačnosti má těleso s hmotou rozloženou co nejdál od osy rotace
Skládání pohybů tuhého tělesa – určování výsledného pohybu tuhého tělesa, které koná současně několik pohybů dílčích
1. pokud těleso koná několik posuvných pohybů s rychlostmi , je jeho výsledný pohyb taképohybem posuvným s rychlostí
2. otáčí-li se tuhé těleso současně kolem dvou různoběžných os o1 a o2 úhlovými rychlostmi a je jeho výsledným pohybem otáčivý pohyb úhlovou rychlostí kolem okamžité osy oprocházející průsečíkem O os o1 a o2, jejíž směr je shodný se směrem vektoru
3. otáčí-li se tuhé těleso současně kolem dvou rovnoběžných os o1 a o2 úhlovými rychlostmi a ,přičemž je jeho výsledným pohybem otáčivý pohyb úhlovou rychlostí kolem okamžité osy o rovnoběžné s osami o1 a o2
4. libovolný pohyb tuhého tělesa lze pojímat jako pohyb složený z pohybu posuvného, jehož rychlost jerovna rychlosti libovolně zvoleného bodu A tělesa, a z otáčení tělesa kolem tohoto bodu
rychlost kteréhokoliv bodu tuhého tělesa, jehož poloha je určena vektorem vedeným z bodu A je určena vztahem
1 2, ,..., nv v v= + + +1 2 ... nv v v v
ω1 ω2ω ω ω= +1 2
ωω1 ω2
ω ω≠ −1 2 ω ω ω= +1 2
av
r
( )ω= + ×av v r
Pohybové rovnice pro tuhé těleso– diferenciální rovnice popisující pohyb tuhého tělesa, vyplývají z impulzových vět
– dle první impulzové věty je pohyb hmotného středu tuhého tělesa v inerciální vztažné soustavě popsán vektorovou diferenciální rovnicí
kde t je čas, m hmotnost tělesa, rychlost jeho hmotného středu a je výslednice všech vnějších silna těleso působících a posunutých rovnoběžně do jeho hmotného středu
pokud je hmotnost konstantní, potom platí
kde je polohový vektor hmotného středu
– druhou větu impulzovou vyjadřujeme vektorovou diferenciální rovnicí
kde t je čas a je moment hybnosti tuhého tělesa k jeho hmotnému středu určený v soustavěhmotného středu a je výsledný moment všech vnějších sil také vztažený k jeho hmotnému středu
( )⋅ =dd sm v F
tsv F
= = ⋅ =2
2
d dd d
s ss
v rm m m a Ft t
sr
=dd
ss
Lm Mt
sLsM
v
Kinetická energie tuhého tělesa – značka Ek nebo T, skalární veličina definovaná pro těleso, které pokládáme za soustavu hmotných bodů
– pokládáme-li těleso za kontinuum, je rozložení hmotnosti v tělese určeno hustotou, která je obecněfunkcí polohového vektoru (souřadnic) bodů tělesa; kinetická energie je potom určena vztahem
– koná-li tuhé těleso posuvný pohyb, mají všechny jeho body v témže okamžiku stejnou rychlost a jeho kinetická energie je
– otáčí-li se tuhé těleso kolem pevné osy úhlovou rychlostí , jeho kinetická energie dána vztahem
kde a I je moment setrvačnosti tělesa k pevné ose otáčení (je konstantní, protože poloha osy vůči tělesu se neměnívztah platí i pro otáčení kolem pevného bodu, I je moment setrvačnosti tělesa k okamžité ose otáčení
– libovolný pohyb tuhého tělesa lze pojímat jako pohyb složený z posuvného pohybu, jehož rychlost je rovna rychlosti zvoleného bodu tělesa, a z otáčeníkolem tohoto bodu; kinetickou energii potom lze vyjádřit vztahem
ρ= =∫ ∫2 21 d d2k V V
E v V v m
= 212kE mv
ω
ω ω=
ω= 212kE I
ω= +2 21 12 2kE mv I
Stabilita a rovnovážná poloha tuhého tělesa – statická rovnováha tuhého tělesa – zvláštní případ působení sil na tuhé těleso, které nevyvolává změnu
jeho pohybového stavu
– podmínky statické rovnováhy:
– rovnovážná poloha tuhého tělesa – poloha tuhého tělesa, ve které je toto těleso ve statické rovnováze
1. stabilní rovnovážná poloha – při malém vychýlení tuhého tělesa z této polohy působí na něj vnějšísíly tak, že se těleso do této polohy vrací zpět
2. labilní (vratká) rovnovážná poloha – při malém vychýlení tuhého tělesa z této polohy působí na něj vnější síly tak, že se těleso od této polohy vzdaluje
3. indiferentní (volná) rovnovážná poloha – při vychýlení tělesa z této polohy je jeho každá nová poloha také rovnovážnou polohou
( )= = =
= = = = × =∑ ∑ ∑1 1 1
0 0n n n
i i i ii i i
F F M M r F
Tření– jev vyvolaný složitými procesy interakce mezi dotýkajícími se makroskopickými hmotnými objekty či
jejich různými částmi; projevuje se vznikem sil, které působí proti vzájemnému přemístění těchto objektůnebo jejich částí
– síly vznikající při tření jsou disipativními silami a obecně se nazývají třecí síly, někdy se užívá názvuodpor, mechanický odpor, odporová síla
– vnitřní tření – tření vznikající při vzájemnou posouvání částí téže látky, projevuje se tečnými silamipůsobícími mezi dotýkajícími se částmi (viskozita kapalin)
– vnější tření – tření vznikající mezi tuhými tělesy, která se navzájem dotýkají a jsou k sobě přitlačována určitou silou, vnější tření se projevuje silami působícími proti směru vzájemného pohybu těles
rozlišujeme smykové a valivé tření
– smykové tření – dva různé případy – dynamické tření a statické tření
dynamické tření vzniká při posouvání jednoho tělesa po jiném tělesejehož se dotýká a k němuž je přitlačováno určitou silou
je-li styčná plocha plochou rovinnou, platí přibližný Amontonůvzákon, kde μ je koeficient dynamického tření
μ μ ϕ= ⋅ = =, tg tt n
n
FF FF
statické tření působící mezi dotýkajícími se tuhými tělesy přitlačovanými k sobě určitou silou, která jsou vůči sobě v klidu vzniká tehdy, když na jedno z těles začne působit síla rovnoběžná s rovinou dotyku,tedy síla jejímž účinkem by se těleso při absenci tření začalo po druhém tělese pohybovat
mezní síla statického tření – síla působící proti síle právě v okamžiku přechodu tělesa z klidu dopohybu; platí
kde je velikost normálové složky síly působící v rovině dotyku
μs je koeficient statického tření, platí μs > μ– valivé tření – odpor působící při valení oblého pevného tělesa po jiném tělese, k němuž je přitlačováno
určitou silou
odpor při valení je vyvolán deformacemi obou těles v okolí bodu (přímky) jejich dotyku, které vznikají tím,že jsou tělesa přitlačována
pro sílu valivého odporu platí
kde ξ je rameno valivého odporu (dříve též součinitel valivého tření), veličina závisející na materiálu těles a kvalitě jejich povrchu, r je poloměr valeného tělesa a síla, kterou těleso působí na podložku
μ= ⋅t s nF F
F
0tF F
nF
ξ= ⋅ nv
FFr
nF
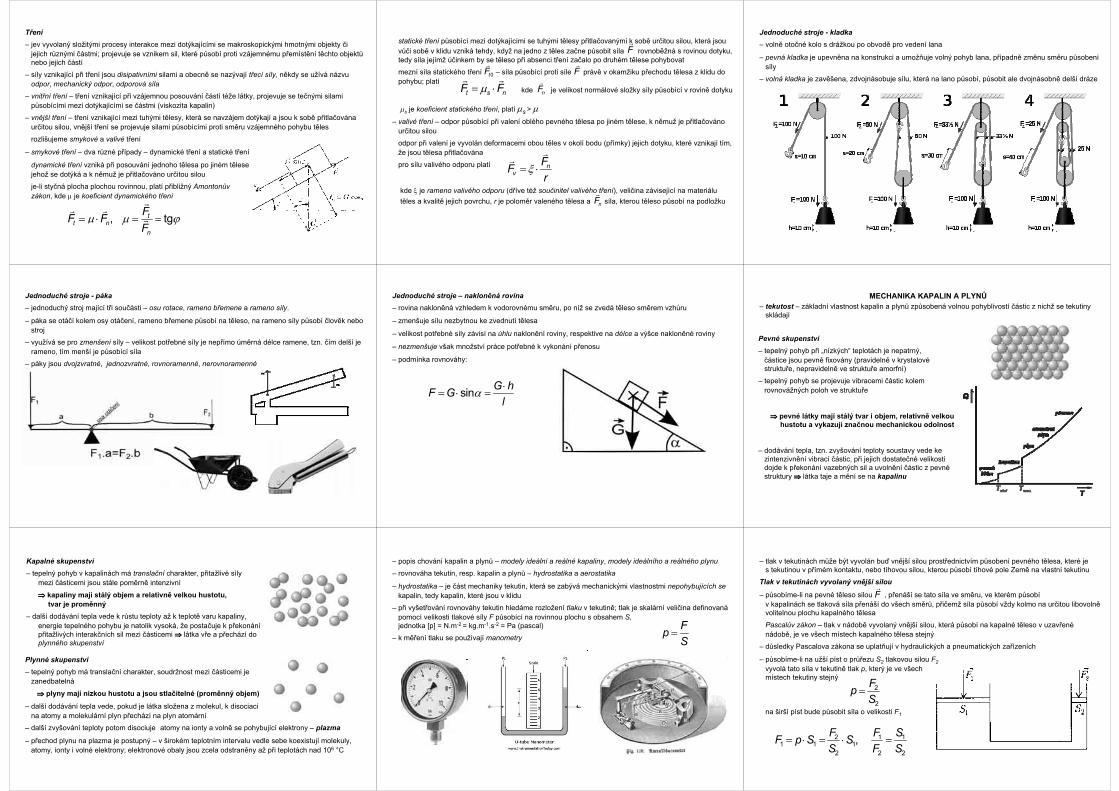
Jednoduché stroje - kladka– volně otočné kolo s drážkou po obvodě pro vedení lana
– pevná kladka je upevněna na konstrukci a umožňuje volný pohyb lana, případně změnu směru působenísíly
– volná kladka je zavěšena, zdvojnásobuje sílu, která na lano působí, působit ale dvojnásobně delší dráze
Jednoduché stroje - páka– jednoduchý stroj mající tři součásti – osu rotace, rameno břemene a rameno síly.
– páka se otáčí kolem osy otáčení, rameno břemene působí na těleso, na rameno síly působí člověk nebo stroj
– využívá se pro zmenšení síly – velikost potřebné síly je nepřímo úměrná délce ramene, tzn. čím delší je rameno, tím menší je působící síla
– páky jsou dvojzvratné, jednozvratné, rovnoramenné, nerovnoramenné
Jednoduché stroje – nakloněná rovina– rovina nakloněná vzhledem k vodorovnému směru, po níž se zvedá těleso směrem vzhůru
– zmenšuje sílu nezbytnou ke zvednutí tělesa
– velikost potřebné síly závisí na úhlu naklonění roviny, respektive na délce a výšce nakloněné roviny
– nezmenšuje však množství práce potřebné k vykonání přenosu
– podmínka rovnováhy:
α ⋅= ⋅ =sin G hF G
l
– tekutost – základní vlastnost kapalin a plynů způsobená volnou pohyblivostí částic z nichž se tekutinyskládají
MECHANIKA KAPALIN A PLYNŮ
Pevné skupenství– tepelný pohyb při „nízkých“ teplotách je nepatrný, částice jsou pevně fixovány (pravidelně v krystalovéstruktuře, nepravidelně ve struktuře amorfní)
– tepelný pohyb se projevuje vibracemi částic kolem rovnovážných poloh ve struktuře
⇒ pevné látky mají stálý tvar i objem, relativně velkou hustotu a vykazují značnou mechanickou odolnost
– dodávání tepla, tzn. zvyšování teploty soustavy vede ke zintenzivnění vibrací částic, při jejich dostatečné velikostidojde k překonání vazebných sil a uvolnění částic z pevnéstruktury ⇒ látka taje a mění se na kapalinu
Plynné skupenství– tepelný pohyb má translační charakter, soudržnost mezi částicemi je
zanedbatelná
⇒ plyny mají nízkou hustotu a jsou stlačitelné (proměnný objem)
– další dodávání tepla vede, pokud je látka složena z molekul, k disociaci na atomy a molekulární plyn přechází na plyn atomární
– další zvyšování teploty potom disociuje atomy na ionty a volně se pohybující elektrony – plazma
– přechod plynu na plazma je postupný – v širokém teplotním intervalu vedle sebe koexistují molekuly, atomy, ionty i volné elektrony; elektronové obaly jsou zcela odstraněny až při teplotách nad 106 °C
Kapalné skupenství– tepelný pohyb v kapalinách má translační charakter, přitažlivé síly
mezi částicemi jsou stále poměrně intenzivní
⇒ kapaliny mají stálý objem a relativně velkou hustotu, tvar je proměnný
– další dodávání tepla vede k růstu teploty až k teplotě varu kapaliny, energie tepelného pohybu je natolik vysoká, že postačuje k překonánípřitažlivých interakčních sil mezi částicemi ⇒ látka vře a přechází do plynného skupenství
– popis chování kapalin a plynů – modely ideální a reálné kapaliny, modely ideálního a reálného plynu
– rovnováha tekutin, resp. kapalin a plynů – hydrostatika a aerostatika
– hydrostatika – je část mechaniky tekutin, která se zabývá mechanickými vlastnostmi nepohybujících sekapalin, tedy kapalin, které jsou v klidu
– při vyšetřování rovnováhy tekutin hledáme rozložení tlaku v tekutině; tlak je skalární veličina definovanápomocí velikosti tlakové síly F působící na rovinnou plochu s obsahem S, jednotka [p] = N.m-2 = kg.m-1.s-2 = Pa (pascal)
– k měření tlaku se používají manometry =FpS
– tlak v tekutinách může být vyvolán buď vnější silou prostřednictvím působení pevného tělesa, které je s tekutinou v přímém kontaktu, nebo tíhovou silou, kterou působí tíhové pole Země na vlastní tekutinu
Tlak v tekutinách vyvolaný vnější silou
– působíme-li na pevné těleso silou , přenáší se tato síla ve směru, ve kterém působív kapalinách se tlaková síla přenáší do všech směrů, přičemž síla působí vždy kolmo na určitou libovolněvolitelnou plochu kapalného tělesa
Pascalův zákon – tlak v nádobě vyvolaný vnější silou, která působí na kapalné těleso v uzavřenénádobě, je ve všech místech kapalného tělesa stejný
– důsledky Pascalova zákona se uplatňují v hydraulických a pneumatických zařízeních
– působíme-li na užší píst o průřezu S2 tlakovou silou F2vyvolá tato síla v tekutině tlak p, který je ve všech místech tekutiny stejný
na širší píst bude působit síla o velikosti F1
F
= 2
2
FpS
= ⋅ = ⋅ =2 1 11 1 1
2 2 2
, F F SF p S SS F S
Tlak v kapalinách vyvolaný tíhovou silou– v tíhovém poli Země působí na všechny částice kapalného tělesa přitažlivá tíhová síla
– výsledkem tohoto působení je hydrostatická tlaková síla , kterou kapalina působí na dno a stěny nádoby, nebo na ponořená tělesa
– velikost hydrostatické síly, kterou působí kapalina o hustotě ρ v hloubce h na dno nádoby o plošném obsahu S je dána vztahem
⇒ hydrostatický paradox (hydrostatické paradoxon) velikost hydrostatické tlakové síly nezávisí na tvaru a celkovém objemu kapalného tělesa
hF
ρ= ⋅ = ⋅ ⋅ ⋅hF m g S h g
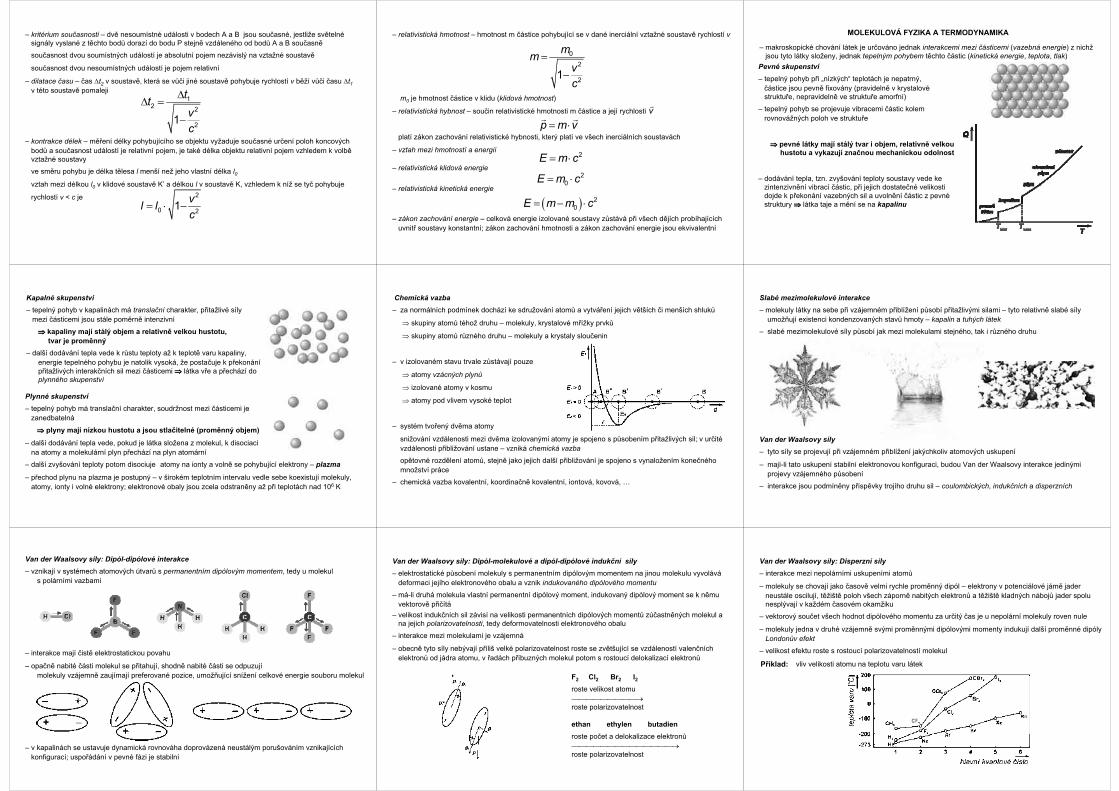
Tlak vzduchu vyvolaný tíhovou silou– tlak vzduchu je vyvolaný tíhou atmosféry působící kolmo k dané rovině – atmosférická tíhová síla
– síla působí na všechna tělesa i na celý povrch Země; tlak touto silou vyvolaný se nazývá atmosférický tlak pa
– normální atmosférický tlak u hladiny moře je 101,325 kPa, každých 100 m výšky se jeho velikost snížío cca 1,3 kPa
Torricelliův pokus
– existence atmosférického tlaku byla prokázána tím, že tento tlak ve shora zatavené skleněné trubiciudrží sloupec rtuti (nad rtutí je vakuum) o výšce přibližně 0,760 m
– skutečná výška sloupce potom měří aktuální atmosférickýtlak v místě nádobky se rtutí
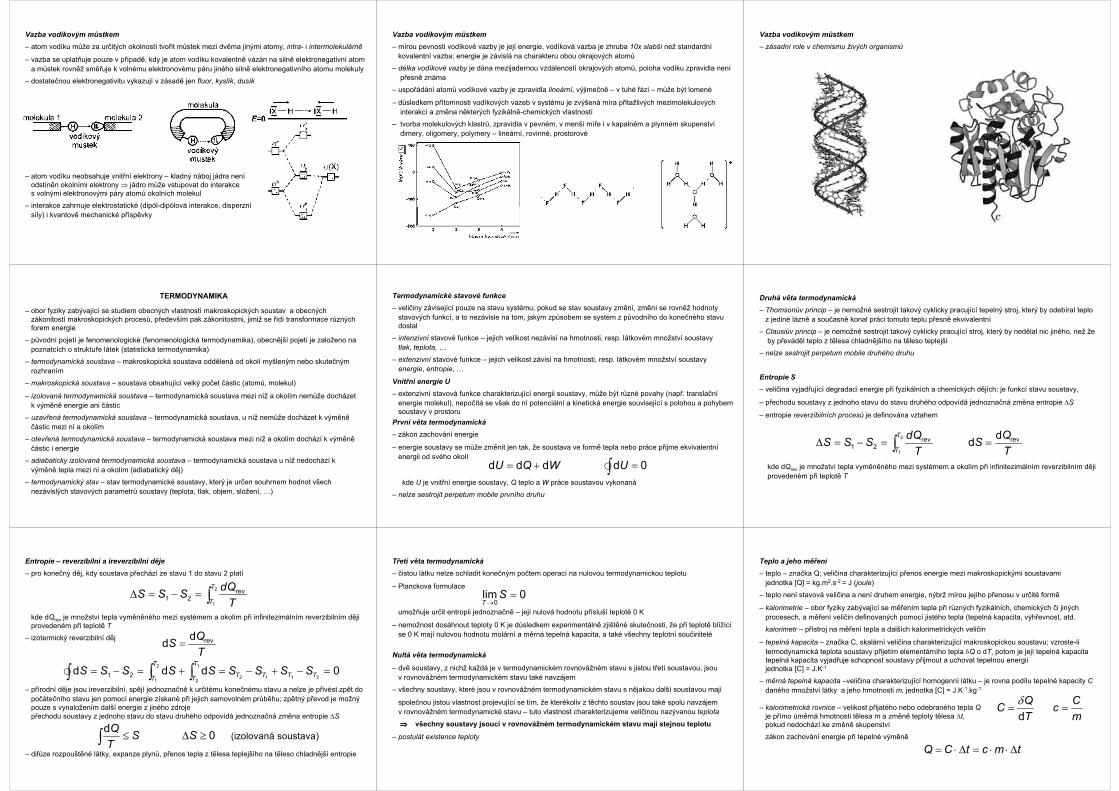
aFZávislost tlaku vzduchu na nadmořské výšce
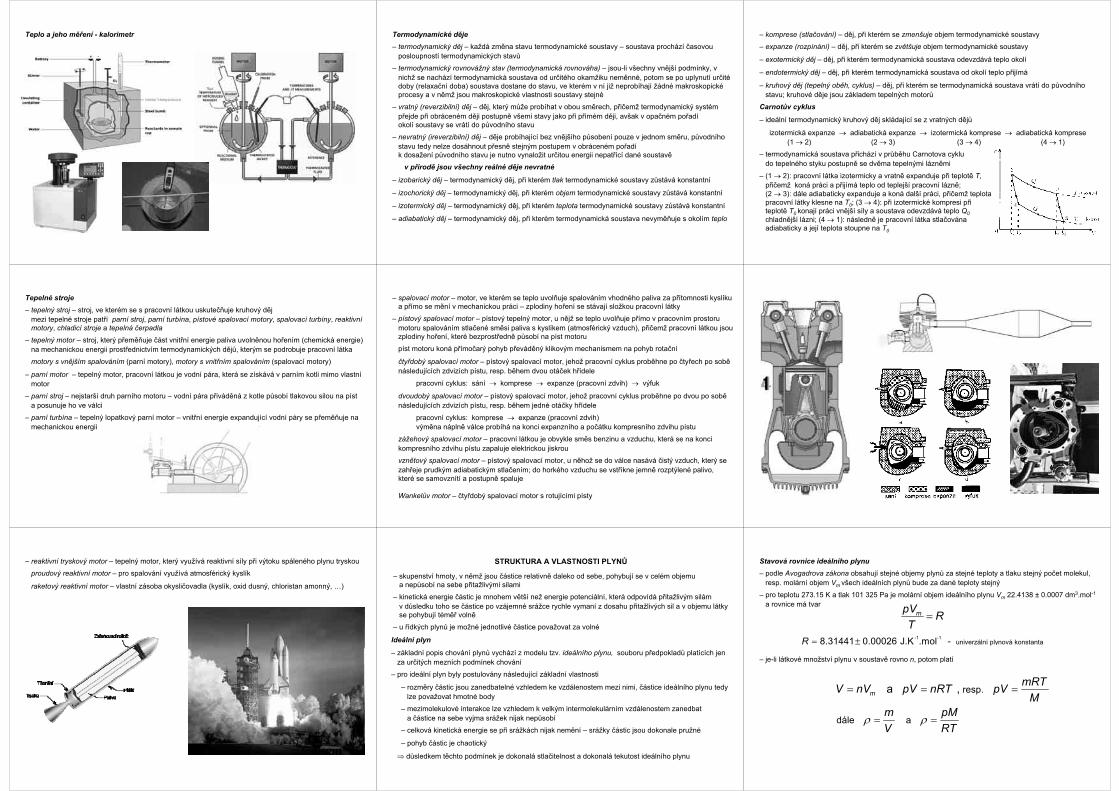
Těleso ponořené v tekutině – Archimédův zákon– těleso ponořené do tekutiny je nadlehčováno silou, která je rovna tíze tekutiny tělesem vytlačené
nadlehčující síla je orientována proti směru tíhového zrychlení a nazývá se vztlaková síla (vztlak)
Vp je objem ponořené části tělesa, ρk je hustota kapaliny
těleso se ponoří do kapaliny tím větší částí svého objemu, čím je jeho hustota větší, nebo čím je hustota kapaliny menší
– tři možné situace: FG > Fvz nebo FG = Fvz nebo FG < Fvz
– objem ponořené části
ρ= ⋅ ⋅vz p kF V gvzF
ρ ρ= −
= ⋅ ⋅ − ⋅ ⋅G vz
t t p k
F F FF V g V g
ρ ρ
ρρ
⋅ ⋅ = ⋅ ⋅
=
t t p k
p t
t k
V g V gVV
Proudění tekutin– pohyb tekutin , kdy u částic, z nichž je tekutina složena, převažuje pohyb v jednom směru; tento pohyb
je složitější než u pohybu pevných látek, protože jednotlivé částice mohou měnit vzájemnou polohu
– každá částice v proudící tekutině má určitou rychlost v, její velikost a směr se může měnit; pokud serychlost nemění, jedná se o ustálené (stacionární) proudění
– trajektorie proudící částice se znázorňuje proudnicí – myšlená čára, jejíž tečna v libovolné bodě má směr rychlosti v pohybující se částice; při ustáleném proudění prochází každým bodem proudící tekutiny pouzejedna proudnice
– proudová trubice – válcová plocha vytvořená z proudnic
– proudové vlákno – je tvořeno tekutinou uzavřenou v proudové trubici (průřez trubice)
– objemový průtok – objem kapaliny Qv, který proteče daným průřezem trubice za jednotku času,protéká-li průřezem o plošném obsahu S kapalina tekutina rychlostí v, je dán objemový průtok vztahem
– ideální kapalina je nestlačitelná, nemůže se na žádném místě hromadit, proto při jejím ustáleném proudění je součin obsahu průřezu S a rychlosti proudu v v každém místě proudové trubice stejný
rovnice kontinuity
= ⋅vQ S v
= ⋅ = konst.vQ S v
– hmotnostní průtok – hmotnost látky, která projde průřezem trubice za jednotku časumezi hmotnostním a objemovým průtokem platí vztah
vhodný pro plynyrovnice kontinuity
ρ= ⋅m vQ Q
= konst.mQBernoulliho rovnice– zákon zachování energie pro proudění ideální tekutiny
ve vodorovném potrubí
⇒ v jednotkovém objemu proudící tekutiny je ve všechčástech vodorovné trubice stálý součet kinetickéa potenciální tlakové energie
– při obecném nevodorovném proudění je třebazohlednit i potenciální tíhovou energii tekutiny
– Pitotova trubice – zařízení na měření rychlosti proudící tekutiny (rychloměry letadel)
ρ ⋅ + =21 konst.2
v p
Hydrodynamický paradox (hydrodynamické paradoxon)– s nárůstem rychlosti v proudící tekutiny při stacionárním proudění dochází k poklesu tlaku p
– proudí-li kapalina v tíhovém poli vodorovnou trubicí, plyne z Bernoulliovy rovnice následující vztah meziveličinami vztaženými ke dvěma bodům
z tohoto vztahu plyne, že pro v2 > v1 je p2 < p1, velikosti těchto tlaků odpovídají výškám h1 a h2
– tlak p2 v místě 2 může klesnout i pod hodnotu okolníhoatmosférického tlaku a otvor v místě 2 potom nasáváokolní vzduch – vodní vývěva, rozprašovače
ρ ρ⋅ + = ⋅ +2 21 1 2 2
1 12 2
v p v p
Obtékání těles reálnou kapalinou– jev, ke kterému dochází při pohybu tělesa vzhledem ke kapalině
– při obtékání mezi kapalinou a tělesem působí hydrodynamická, resp. aerodynamická síla
– při malých rychlostech je proudění tekutiny kolem tělesa laminární, při rychlostech vyšších turbulentní
– velikost odporové síly se zvětšuje s druhou mocninou rychlosti
C je součinitel odporu, ρ hustota tekutiny, S obsah průřezu tělesakolmého ke směru pohybu a v relativní rychlost ρ= ⋅ ⋅ ⋅ 21
2F C S v
– A. Einstein (1905)
– teorie relativity – teorie studující zákonitosti prostoru a času pro libovolné fyzikální jevy v libovolných vztažných soustavách
– speciální teorie relativity – teorie zabývající se vlastnostmi prostoročasu v přiblížení, v němž lze zanedbat gravitační působení; studuje takové fyzikální děje v inerciálních vztažných soustavách, u nichž se významně projevuje existence mezní rychlosti šíření signálů
– prostoročas – čtyřrozměrné kontinuum sjednocující trojrozměrný prostor a čas
– Einsteinovy postuláty speciální teorie relativity
1. speciální princip relativity – všechny inerciální vztažné soustavy jsou pro popis všech fyzikálních dějůrovnocenné
2. princip konstantní rychlosti světla ve vakuu – rychlost světla c ve vakuu je ve všech inerciálních vztažných soustavách a ve všech směrech stejná a nezávisí na pohybu zdroje ani pozorovatele
c = 299 792 458 m.s-1
– událost – nebo bodová událost; to, co nastane v určitém bodě o souřadnicích x, y, z v určitém okamžiku t
– současné události – bodové události, které nastanou v dané inerciální soustavě v témž okamžiku
– soumístné události – bodové události nastávající v dané inerciální soustavě v tomtéž bodě
– světočára – křivka v prostoročase vystihující pohyb částice
SPECIÁLNÍ TEORIE RELATIVITY
– kritérium současnosti – dvě nesoumístné události v bodech A a B jsou současné, jestliže světelnésignály vyslané z těchto bodů dorazí do bodu P stejně vzdáleného od bodů A a B současně
současnost dvou soumístných událostí je absolutní pojem nezávislý na vztažné soustavě
současnost dvou nesoumístných událostí je pojem relativní
– dilatace času – čas Δt2 v soustavě, která se vůči jiné soustavě pohybuje rychlostí v běží vůči času Δt1v této soustavě pomaleji
– kontrakce délek – měření délky pohybujícího se objektu vyžaduje současné určení poloh koncových bodů a současnost událostí je relativní pojem, je také délka objektu relativní pojem vzhledem k volběvztažné soustavy
ve směru pohybu je délka tělesa l menší než jeho vlastní délka l0vztah mezi délkou l0 v klidové soustavě K’ a délkou l v soustavě K, vzhledem k níž se tyč pohybuje
rychlostí v < c je
ΔΔ =
−
12 2
21
ttvc
= ⋅ −2
0 21 vl lc
– relativistická hmotnost – hmotnost m částice pohybující se v dané inerciální vztažné soustavě rychlostí v
m0 je hmotnost částice v klidu (klidová hmotnost)
– relativistická hybnost – součin relativistické hmotnosti m částice a její rychlosti
platí zákon zachování relativistické hybnosti, který platí ve všech inerciálních soustavách
– vztah mezi hmotností a energií
– relativistická klidová energie
– relativistická kinetická energie
– zákon zachování energie – celková energie izolované soustavy zůstává při všech dějích probíhajících uvnitř soustavy konstantní; zákon zachování hmotnosti a zákon zachování energie jsou ekvivalentní
=
−
02
21
mmvc
v
= ⋅p m v
= ⋅ 2E m c
= ⋅ 20E m c
( )= − ⋅ 20E m m c
MOLEKULOVÁ FYZIKA A TERMODYNAMIKA
Pevné skupenství– tepelný pohyb při „nízkých“ teplotách je nepatrný, částice jsou pevně fixovány (pravidelně v krystalovéstruktuře, nepravidelně ve struktuře amorfní)
– tepelný pohyb se projevuje vibracemi částic kolem rovnovážných poloh ve struktuře
⇒ pevné látky mají stálý tvar i objem, relativně velkou hustotu a vykazují značnou mechanickou odolnost
– dodávání tepla, tzn. zvyšování teploty soustavy vede ke zintenzivnění vibrací částic, při jejich dostatečné velikostidojde k překonání vazebných sil a uvolnění částic z pevnéstruktury ⇒ látka taje a mění se na kapalinu
– makroskopické chování látek je určováno jednak interakcemi mezi částicemi (vazebná energie) z nichžjsou tyto látky složeny, jednak tepelným pohybem těchto částic (kinetická energie, teplota, tlak)
Plynné skupenství– tepelný pohyb má translační charakter, soudržnost mezi částicemi je
zanedbatelná
⇒ plyny mají nízkou hustotu a jsou stlačitelné (proměnný objem)
– další dodávání tepla vede, pokud je látka složena z molekul, k disociaci na atomy a molekulární plyn přechází na plyn atomární
– další zvyšování teploty potom disociuje atomy na ionty a volně se pohybující elektrony – plazma
– přechod plynu na plazma je postupný – v širokém teplotním intervalu vedle sebe koexistují molekuly, atomy, ionty i volné elektrony; elektronové obaly jsou zcela odstraněny až při teplotách nad 106 K
Kapalné skupenství– tepelný pohyb v kapalinách má translační charakter, přitažlivé síly
mezi částicemi jsou stále poměrně intenzivní
⇒ kapaliny mají stálý objem a relativně velkou hustotu, tvar je proměnný
– další dodávání tepla vede k růstu teploty až k teplotě varu kapaliny, energie tepelného pohybu je natolik vysoká, že postačuje k překonánípřitažlivých interakčních sil mezi částicemi ⇒ látka vře a přechází do plynného skupenství
Chemická vazba– za normálních podmínek dochází ke sdružování atomů a vytváření jejich větších či menších shluků
⇒ skupiny atomů téhož druhu – molekuly, krystalové mřížky prvků
⇒ skupiny atomů různého druhu – molekuly a krystaly sloučenin
– v izolovaném stavu trvale zůstávají pouze
⇒ atomy vzácných plynů
⇒ izolované atomy v kosmu
⇒ atomy pod vlivem vysoké teplot
– systém tvořený dvěma atomy
snižování vzdálenosti mezi dvěma izolovanými atomy je spojeno s působením přitažlivých sil; v určitévzdálenosti přibližování ustane – vzniká chemická vazba
opětovné rozdělení atomů, stejně jako jejich další přibližování je spojeno s vynaložením konečného množství práce
Slabé mezimolekulové interakce– molekuly látky na sebe při vzájemném přiblížení působí přitažlivými silami – tyto relativně slabé síly
umožňují existenci kondenzovaných stavů hmoty – kapalin a tuhých látek
– slabé mezimolekulové síly působí jak mezi molekulami stejného, tak i různého druhu
Van der Waalsovy síly – tyto síly se projevují při vzájemném přiblížení jakýchkoliv atomových uskupení
– mají-li tato uskupení stabilní elektronovou konfiguraci, budou Van der Waalsovy interakce jedinýmiprojevy vzájemného působení
– interakce jsou podmíněny příspěvky trojího druhu sil – coulombických, indukčních a disperzních
Van der Waalsovy síly: Dipól-dipólové interakce– vznikají v systémech atomových útvarů s permanentním dipólovým momentem, tedy u molekul
s polárními vazbami
– interakce mají čistě elektrostatickou povahu
– opačně nabité části molekul se přitahují, shodně nabité části se odpuzujímolekuly vzájemně zaujímají preferované pozice, umožňující snížení celkové energie souboru molekul
– v kapalinách se ustavuje dynamická rovnováha doprovázená neustálým porušováním vznikajících konfigurací; uspořádání v pevné fázi je stabilní
Van der Waalsovy síly: Dipól-molekulové a dipól-dipólové indukční síly– elektrostatické působení molekuly s permanentním dipólovým momentem na jinou molekulu vyvolává
deformaci jejího elektronového obalu a vznik indukovaného dipólového momentu
– má-li druhá molekula vlastní permanentní dipólový moment, indukovaný dipólový moment se k němuvektorově přičítá
– velikost indukčních sil závisí na velikosti permanentních dipólových momentů zúčastněných molekul a na jejich polarizovatelnosti, tedy deformovatelnosti elektronového obalu
– interakce mezi molekulami je vzájemná
– obecně tyto síly nebývají příliš velké polarizovatelnost roste se zvětšující se vzdáleností valenčníchelektronů od jádra atomu, v řadách příbuzných molekul potom s rostoucí delokalizací elektronů
F2 Cl2 Br2 I2roste velikost atomu⎯⎯⎯⎯⎯⎯⎯⎯⎯→roste polarizovatelnost
ethan ethylen butadienroste počet a delokalizace elektronů⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯→roste polarizovatelnost
Van der Waalsovy síly: Disperzní síly– interakce mezi nepolárními uskupeními atomů
– molekuly se chovají jako časově velmi rychle proměnný dipól – elektrony v potenciálové jámě jader neustále oscilují, těžiště poloh všech záporně nabitých elektronů a těžiště kladných nábojů jader spolunesplývají v každém časovém okamžiku
– vektorový součet všech hodnot dipólového momentu za určitý čas je u nepolární molekuly roven nule
– molekuly jedna v druhé vzájemně svými proměnnými dipólovými momenty indukují další proměnné dipólyLondonův efekt
– velikost efektu roste s rostoucí polarizovatelností molekul
Příklad: vliv velikosti atomu na teplotu varu látek
Vazba vodíkovým můstkem– atom vodíku může za určitých okolností tvořit můstek mezi dvěma jinými atomy, intra- i intermolekulárně
– vazba se uplatňuje pouze v případě, kdy je atom vodíku kovalentně vázán na silně elektronegativní atoma můstek rovněž směřuje k volnému elektronovému páru jiného silně elektronegativního atomu molekuly
– dostatečnou elektronegativitu vykazují v zásadě jen fluor, kyslík, dusík
– atom vodíku neobsahuje vnitřní elektrony – kladný náboj jádra neníodstíněn okolními elektrony ⇒ jádro může vstupovat do interakce s volnými elektronovými páry atomů okolních molekul
– interakce zahrnuje elektrostatické (dipól-dipólová interakce, disperznísíly) i kvantově mechanické příspěvky
Vazba vodíkovým můstkem– mírou pevnosti vodíkové vazby je její energie, vodíková vazba je zhruba 10x slabší než standardní
kovalentní vazba; energie je závislá na charakteru obou okrajových atomů
– délka vodíkové vazby je dána mezijadernou vzdáleností okrajových atomů, poloha vodíku zpravidla nenípřesně známa
– uspořádání atomů vodíkové vazby je zpravidla lineární, výjimečně – v tuhé fázi – může být lomené
– důsledkem přítomnosti vodíkových vazeb v systému je zvýšená míra přitažlivých mezimolekulovýchinterakcí a změna některých fyzikálně-chemických vlastností
– tvorba molekulových klastrů, zpravidla v pevném, v menší míře i v kapalném a plynném skupenstvídimery, oligomery, polymery – lineární, rovinné, prostorové
Vazba vodíkovým můstkem– zásadní role v chemismu živých organismů
TERMODYNAMIKA
– obor fyziky zabývající se studiem obecných vlastností makroskopických soustav a obecných zákonitostí makroskopických procesů, především pak zákonitostmi, jimiž se řídí transformace různýchforem energie
– původní pojetí je fenomenologické (fenomenologická termodynamika), obecnější pojetí je založeno na poznatcích o struktuře látek (statistická termodynamika)
– termodynamická soustava – makroskopická soustava oddělená od okolí myšleným nebo skutečnýmrozhraním
– makroskopická soustava – soustava obsahující velký počet částic (atomů, molekul)
– izolovaná termodynamická soustava – termodynamická soustava mezi níž a okolím nemůže docházet k výměně energie ani částic
– uzavřená termodynamická soustava – termodynamická soustava, u níž nemůže docházet k výměněčástic mezi ní a okolím
– otevřená termodynamická soustava – termodynamická soustava mezi níž a okolím dochází k výměněčástic i energie
– adiabaticky izolovaná termodynamická soustava – termodynamická soustava u níž nedochází k výměně tepla mezi ní a okolím (adiabatický děj)
– termodynamický stav – stav termodynamické soustavy, který je určen souhrnem hodnot všech nezávislých stavových parametrů soustavy (teplota, tlak, objem, složení, …)
Termodynamické stavové funkce– veličiny závisející pouze na stavu systému; pokud se stav soustavy změní, změní se rovněž hodnoty
stavových funkcí, a to nezávisle na tom, jakým způsobem se systém z původního do konečného stavu dostal
– intenzivní stavové funkce – jejich velikost nezávisí na hmotnosti, resp. látkovém množství soustavytlak, teplota, …
– extenzivní stavové funkce – jejich velikost závisí na hmotnosti, resp. látkovém množství soustavyenergie, entropie, …
Vnitřní energie U– extenzivní stavová funkce charakterizující energii soustavy, může být různé povahy (např. translační
energie molekul), nepočítá se však do ní potenciální a kinetická energie související s polohou a pohybem soustavy v prostoru
První věta termodynamická– zákon zachování energie
– energie soustavy se může změnit jen tak, že soustava ve formě tepla nebo práce přijme ekvivalentníenergii od svého okolí
kde U je vnitřní energie soustavy, Q teplo a W práce soustavou vykonaná
– nelze sestrojit perpetum mobile prvního druhu
= + =∫d d d d 0 U Q W U
Druhá věta termodynamická– Thomsonův princip – je nemožné sestrojit takový cyklicky pracující tepelný stroj, který by odebíral teplo
z jediné lázně a současně konal práci tomuto teplu přesně ekvivalentní
– Clausiův princip – je nemožné sestrojit takový cyklicky pracující stroj, který by nedělal nic jiného, než že by převáděl teplo z tělesa chladnějšího na těleso teplejší
– nelze sestrojit perpetum mobile druhého druhu
Entropie S– veličina vyjadřující degradaci energie při fyzikálních a chemických dějích; je funkcí stavu soustavy,
– přechodu soustavy z jednoho stavu do stavu druhého odpovídá jednoznačná změna entropie ΔS
– entropie reverzibilních procesů je definována vztahem
kde dQrev je množství tepla vyměněného mezi systémem a okolím při infinitezimálním reverzibilním ději provedeném při teplotě T
= revdd QST
Δ = − = ∫2
1
rev1 2
T
T
dQS S ST
Entropie – reverzibilní a ireverzibilní děje– pro konečný děj, kdy soustava přechází ze stavu 1 do stavu 2 platí
kde dQrev je množství tepla vyměněného mezi systémem a okolím při infinitezimálním reverzibilním dějiprovedeném při teplotě T
– izotermický reverzibilní děj
– přírodní děje jsou ireverzibilní, spějí jednoznačně k určitému konečnému stavu a nelze je přivést zpět dopočátečního stavu jen pomocí energie získané při jejich samovolném průběhu; zpětný převod je možnýpouze s vynaložením další energie z jiného zdroje přechodu soustavy z jednoho stavu do stavu druhého odpovídá jednoznačná změna entropie ΔS
– difúze rozpouštěné látky, expanze plynů, přenos tepla z tělesa teplejšího na těleso chladnější entropie
= revdd QST
Δ = − = ∫2
1
rev1 2
T
T
dQS S ST
= − = + = − + − =∫ ∫ ∫2 1
2 1 1 21 2
1 2d d d 0 T T
T T T TT TS S S S S S S S S
≤ Δ ≥∫ (izolovaná soustava) d 0 Q S ST
Třetí věta termodynamická– čistou látku nelze ochladit konečným počtem operací na nulovou termodynamickou teplotu
– Planckova formulace
umožňuje určit entropii jednoznačně – její nulová hodnotu přísluší teplotě 0 K
– nemožnost dosáhnout teploty 0 K je důsledkem experimentálně zjištěné skutečnosti, že při teplotě blížícíse 0 K mají nulovou hodnotu molární a měrná tepelná kapacita, a také všechny teplotní součinitelé
Nultá věta termodynamická
– dvě soustavy, z nichž každá je v termodynamickém rovnovážném stavu s jistou třetí soustavou, jsouv rovnovážném termodynamickém stavu také navzájem
– všechny soustavy, které jsou v rovnovážném termodynamickém stavu s nějakou další soustavou mají
společnou jistou vlastnost projevující se tím, že kterékoliv z těchto soustav jsou také spolu navzájemv rovnovážném termodynamické stavu – tuto vlastnost charakterizujeme veličinou nazývanou teplota
⇒ všechny soustavy jsoucí v rovnovážném termodynamickém stavu mají stejnou teplotu
– postulát existence teploty
→=
0lim 0T
S
Teplo a jeho měření– teplo – značka Q; veličina charakterizující přenos energie mezi makroskopickými soustavami
jednotka [Q] = kg.m2.s-2 = J (joule)
– teplo není stavová veličina a není druhem energie, nýbrž mírou jejího přenosu v určité formě
– kalorimetrie – obor fyziky zabývající se měřením tepla při různých fyzikálních, chemických či jiných procesech, a měření veličin definovaných pomocí jistého tepla (tepelná kapacita, výhřevnost, atd.
kalorimetr – přístroj na měření tepla a dalších kalorimetrických veličin
– tepelná kapacita – značka C, skalární veličina charakterizující makroskopickou soustavu; vzroste-li termodynamická teplota soustavy přijetím elementárního tepla δQ o dT, potom je její tepelná kapacitatepelná kapacita vyjadřuje schopnost soustavy přijmout a uchovat tepelnou energiijednotka [C] = J.K-1
– měrná tepelná kapacita –veličina charakterizující homogenní látku – je rovna podílu tepelné kapacity Cdaného množství látky a jeho hmotnosti m, jednotka [C] = J.K-1.kg-1
– kalorimetrická rovnice – velikost přijatého nebo odebraného tepla Qje přímo úměrná hmotnosti tělesa m a změně teploty tělesa Δt, pokud nedochází ke změně skupenství
zákon zachování energie při tepelné výměně
= Ccm
δ=
dQCT
= ⋅ Δ = ⋅ ⋅ ΔQ C t c m t
Teplo a jeho měření - kalorimetr Termodynamické děje– termodynamický děj – každá změna stavu termodynamické soustavy – soustava prochází časovou
posloupností termodynamických stavů
– termodynamický rovnovážný stav (termodynamická rovnováha) – jsou-li všechny vnější podmínky, v nichž se nachází termodynamická soustava od určitého okamžiku neměnné, potom se po uplynutí určitédoby (relaxační doba) soustava dostane do stavu, ve kterém v ní již neprobíhají žádné makroskopicképrocesy a v němž jsou makroskopické vlastnosti soustavy stejné
– vratný (reverzibilní) děj – děj, který může probíhat v obou směrech, přičemž termodynamický systém přejde při obráceném ději postupně všemi stavy jako při přímém ději, avšak v opačném pořadíokolí soustavy se vrátí do původního stavu
– nevratný (ireverzibilní) děj – děje probíhající bez vnějšího působení pouze v jednom směru, původního stavu tedy nelze dosáhnout přesně stejným postupem v obráceném pořadík dosažení původního stavu je nutno vynaložit určitou energii nepatřící dané soustavě
v přírodě jsou všechny reálné děje nevratné
– izobarický děj – termodynamický děj, při kterém tlak termodynamické soustavy zůstává konstantní
– izochorický děj – termodynamický děj, při kterém objem termodynamické soustavy zůstává konstantní
– izotermický děj – termodynamický děj, při kterém teplota termodynamické soustavy zůstává konstantní
– adiabatický děj – termodynamický děj, při kterém termodynamická soustava nevyměňuje s okolím teplo
– komprese (stlačování) – děj, při kterém se zmenšuje objem termodynamické soustavy
– expanze (rozpínání) – děj, při kterém se zvětšuje objem termodynamické soustavy
– exotermický děj – děj, při kterém termodynamická soustava odevzdává teplo okolí
– endotermický děj – děj, při kterém termodynamická soustava od okolí teplo přijímá
– kruhový děj (tepelný oběh, cyklus) – děj, při kterém se termodynamická soustava vrátí do původního stavu; kruhové děje jsou základem tepelných motorů
Carnotův cyklus
– ideální termodynamický kruhový děj skládající se z vratných dějů
– termodynamická soustava přichází v průběhu Carnotova cyklu do tepelného styku postupně se dvěma tepelnými lázněmi
– (1 → 2): pracovní látka izotermicky a vratně expanduje při teplotě T, přičemž koná práci a přijímá teplo od teplejší pracovní lázně;(2 → 3): dále adiabaticky expanduje a koná další práci, přičemž teplota pracovní látky klesne na T0; (3 → 4): při izotermické kompresi přiteplotě T0 konají práci vnější síly a soustava odevzdává teplo Q0chladnější lázni; (4 → 1): následně je pracovní látka stlačována adiabaticky a její teplota stoupne na T0
Tepelné stroje– tepelný stroj – stroj, ve kterém se s pracovní látkou uskutečňuje kruhový děj
mezi tepelné stroje patří parní stroj, parní turbína, pístové spalovací motory, spalovací turbíny, reaktivnímotory, chladicí stroje a tepelná čerpadla
– tepelný motor – stroj, který přeměňuje část vnitřní energie paliva uvolněnou hořením (chemická energie) na mechanickou energii prostřednictvím termodynamických dějů, kterým se podrobuje pracovní látka
motory s vnějším spalováním (parní motory), motory s vnitřním spalováním (spalovací motory)
– parní motor – tepelný motor, pracovní látkou je vodní pára, která se získává v parním kotli mimo vlastnímotor
– parní stroj – nejstarší druh parního motoru – vodní pára přiváděná z kotle působí tlakovou silou na píst a posunuje ho ve válci
– parní turbína – tepelný lopatkový parní motor – vnitřní energie expandující vodní páry se přeměňuje na mechanickou energii
– spalovací motor – motor, ve kterém se teplo uvolňuje spalováním vhodného paliva za přítomnosti kyslíku a přímo se mění v mechanickou práci – zplodiny hoření se stávají složkou pracovní látky
– pístový spalovací motor – pístový tepelný motor, u nějž se teplo uvolňuje přímo v pracovním prostoru motoru spalováním stlačené směsi paliva s kyslíkem (atmosférický vzduch), přičemž pracovní látkou jsou zplodiny hoření, které bezprostředně působí na píst motoru
píst motoru koná přímočarý pohyb převáděný klikovým mechanismem na pohyb rotační
čtyřdobý spalovací motor – pístový spalovací motor, jehož pracovní cyklus proběhne po čtyřech po soběnásledujících zdvizích pístu, resp. během dvou otáček hřídele
dvoudobý spalovací motor – pístový spalovací motor, jehož pracovní cyklus proběhne po dvou po soběnásledujících zdvizích pístu, resp. během jedné otáčky hřídele
pracovní cyklus: komprese → expanze (pracovní zdvih)výměna náplně válce probíhá na konci expanzního a počátku kompresního zdvihu pístu
zážehový spalovací motor – pracovní látkou je obvykle směs benzinu a vzduchu, která se na konci kompresního zdvihu pístu zapaluje elektrickou jiskrou
vznětový spalovací motor – pístový spalovací motor, u něhož se do válce nasává čistý vzduch, který sezahřeje prudkým adiabatickým stlačením; do horkého vzduchu se vstříkne jemně rozptýlené palivo, které se samovznítí a postupně spaluje
Wankelův motor – čtyřdobý spalovací motor s rotujícími písty
– reaktivní tryskový motor – tepelný motor, který využívá reaktivní síly při výtoku spáleného plynu tryskou
proudový reaktivní motor – pro spalování využívá atmosférický kyslík
raketový reaktivní motor – vlastní zásoba okysličovadla (kyslík, oxid dusný, chloristan amonný, …) – skupenství hmoty, v němž jsou částice relativně daleko od sebe, pohybují se v celém objemu
a nepůsobí na sebe přitažlivými silami
– kinetická energie částic je mnohem větší než energie potenciální, která odpovídá přitažlivým silámv důsledku toho se částice po vzájemné srážce rychle vymaní z dosahu přitažlivých sil a v objemu látky se pohybují téměř volně
– u řídkých plynů je možné jednotlivé částice považovat za volné
Ideální plyn
– základní popis chování plynů vychází z modelu tzv. ideálního plynu, souboru předpokladů platících jen za určitých mezních podmínek chování
– pro ideální plyn byly postulovány následující základní vlastnosti
– rozměry částic jsou zanedbatelné vzhledem ke vzdálenostem mezi nimi, částice ideálního plynu tedy lze považovat hmotné body
– mezimolekulové interakce lze vzhledem k velkým intermolekulárním vzdálenostem zanedbata částice na sebe vyjma srážek nijak nepůsobí
– celková kinetická energie se při srážkách nijak nemění – srážky částic jsou dokonale pružné
– pohyb částic je chaotický
⇒ důsledkem těchto podmínek je dokonalá stlačitelnost a dokonalá tekutost ideálního plynu
STRUKTURA A VLASTNOSTI PLYNŮ Stavová rovnice ideálního plynu– podle Avogadrova zákona obsahují stejné objemy plynů za stejné teploty a tlaku stejný počet molekul,
resp. molární objem Vm všech ideálních plynů bude za dané teploty stejný
– pro teplotu 273.15 K a tlak 101 325 Pa je molární objem ideálního plynu Vm 22.4138 ± 0.0007 dm3.mol-1a rovnice má tvar
– je-li látkové množství plynu v soustavě rovno n, potom platí
Směs ideálních plynů– z definice ideálního plynu vyplývá skutečnost, že ani ve směsi více plynů se jednotlivé molekuly
vzájemně neovlivňují
⇒ každý plyn se chová, jako kdyby byl ve společném prostoru o objemu V sám
– pro každý plyn platí stavová rovnice
kde ni je látkové množství i-tého plynu a pi je jeho parciální tlak (tlak, který by tento plyn vykazoval, byl-liby v celém objemu sám)
– celkový tlak p směsi ideálních plynů je dán součtem parciálních tlaků všech složek směsi
Daltonův zákon aditivity parciálních tlaků
pro i-tou složku potom platí
=i iRTp nV
= =∑ ∑i ii i
RTp p nV
= = = = , resp. i
i ii i i
RTnp nV x p pxRTp nnV
= = , resp. i i i iRTV n V Vxp
Kinetická teorie ideálního plynu– kinetická teorie plynů vysvětluje na základě chování molekul některé makroskopické vlastnosti soustavy
– teorie vychází z několika základních předpokladůvšechny molekuly se pohybují střední rychlostí ū (nezávisle na skutečnosti, že rychlosti jednotlivýchmolekul se vlivem vzájemných srážek neustále mění)
při nárazu na stěnu nádoby se molekula pružně odrazí stejnou rychlostí ū
je-li hmotnost molekuly m, je změna její hybnosti při nárazu 2mū (pružný odraz)
při chaotickém pohybu se ke stěně nádoby pohybuje 1/6 N molekul
– celková změna hybnosti za časový interval dt
– časová změna hybnosti je rovna síle F, síla F působící na jednotkovou plochu je rovna tlaku p
= ⋅1 2 d6
dP SNu mu t
= = =2 2ad 1 1 d 3 3P FF SNmu p Nmut S
Kinetická teorie ideálního plynu– stavová rovnice ideálního plynu
– střední kinetická energie všech molekul plynu
– střední kinetická energie jedné molekuly
k = (1.380 662 ± 0.000 044).10-23 J.K-1
ε = = =kde je Boltzmannova konstanta1 3 3 2 2k
A A
RT RkT kN N
= = =21 1 3 32 2 2k
RTE Mu M RTM
ρ ρ ρ⇒= = = = = = =2 2a a1 1 konst.3 3m
m
m MNm p u pV Mu RTV V
Reálné plyny– definice ideálního plynu používá zjednodušující skutečnosti, které snižují přesnost popisu chování plynů
reálných (zanedbatelný vlastní objem, zanedbatelné mezimolekulové interakce)
– odchylky od ideálního chování se u reálných plynů projevují především
v odlišném stavovém chování
v odlišném chování při expanzi do vakua
při zkapalňování
Van der Waalsova stavová rovnice
– rovnice zavádí jednoduché korekce, které zohledňují objem molekul a působení přitažlivých sil
– při kompresi plynu se zmenšuje jen volný objem, tzn. celkový objem zmenšený o nestlačitelný vlastníobjem molekul b
molekuly na povrchu plynu jsou vtahovány do objemu plynu určitou silou, která působí ve směru tlakuvnějšího; tzv. vnitřní tlak je nepřímo úměrný čtverci molárního objemu (koeficient a)
( ) ( )⎛ ⎞ ⎛ ⎞+ − = + − =⎜ ⎟ ⎜ ⎟⎝ ⎠⎝ ⎠
2 2a mm
a ap V b RT p V b nRTV V
STRUKTURA A VLASTNOSTI KAPALIN– charakteristickou vlastností kapalin je, že jsou jejich molekuly poměrně stěsnané při současném
zachování volné pohyblivosti – objem je velmi málo závislý na tlaku a kapalina se přizpůsobuje tvarunádoby
– korekční člen na kohezní síly ve Van der Walsově rovnici nabývá hodnot nesrovnatelně vyšších, nežjsou hodnoty vnějšího tlaku – pro kapaliny jsou navrženy speciální stavové rovnice
– kapaliny jeví určité charakteristické vlastnosti – patří k nim vypařování, povrchové napětí a vnitřní tření
Vypařování, tenze páry nad kapalinami
– snižuje-li se vnější tlak působící na kapalinu, dochází ke vzniku plynné fáze (při stejném tlaku, za kterého v případě stlačování plynu došlo k jeho kondenzaci)
⇒ za dané teploty mohou při tomto tlaku vedle sebe koexistovat kapalná i plynná fáze
⇒ vnější tlak se rovná tlaku páry v soustavě, tzn. rovnovážnému tlaku (tenzi) páry nad kapalinou
– rovnováha mezi kapalinou a její párou je dynamická – v daném časovém intervalu zkondenzuje z páry stejné množství molekul, jaké se z kapaliny vypaří
– tenze páry nad kapalinou je funkcí teploty – se vzrůstající teplotou tenze roste– při teplotě, při niž dosáhne tenze páry vnějšího tlaku a kapalina začne vřít – tato teplota se nazývá
teplota varu
– během varu se teplota kapaliny nemění, všechna dodávaná energie se spotřebovává na překonánímezimolekulových sil a uvolnění molekul z kapaliny do plynné fáze
Teplota varu vody při různých tlacích
– kritický bod – bod fázového diagramu reprezentující kritický stav látky (kritická teplota, tlak, objem)nad kritickou teplotou se látka vyskytuje již jen ve formě plynu (nekondenzovaný stav)
Povrchové napětí– na molekulu uvnitř kapaliny působí přitažlivé (kohezní) síly
okolních molekul; síly působí ze všech směrů a navzájem se ruší
– u povrchu působí jednak síly kohezní, jednak síly adhezní(síly mezi molekulami kapaliny a molekulami plynné fáze)
– kohezní síly převažují nad silami adhezními – molekuly z povrchu jsou vtahovány do kapaliny a povrch jeví snahu nabýt co nejmenšíhodnoty (koule)
– má-li být povrch zvětšen, je třeba dodat energii
γ - povrchové napětí kapaliny
– hodnota povrchového napětí nezávisí na velikosti povrchu
– hodnota povrchového napětí závisí na teplotě – se stoupajícíteplotou klesá, při teplotě kritické je potom nulová
γ = = =2 d
d 2 dW F x FS l x l
Povrchové napětí– mezipovrchové napětí a energie se uplatňují obecně, tedy v soustavách kapalina/plyn, kapalina/kapalina,
kapalina/pevná fáze, pevná fáze/plyn
⇒ převažují-li adhezní síly na silami kohezními, pokryje kapalina co největší část povrchu druhé fáze
⇒ převáží-li síly kohezní, snaží se kapalina styčnou plochu s druhou fází omezit na minimum
– kapka kapaliny na jiné, nemísitelné kapalině (např. olej/voda)
působí mezipovrchová napětí γgl, γgl’ a γll’, a kapka zaujme takový tvar, aby se síly vzájemně vykompenzovaly
je-li |γgl| + |γll’| > |γgl’|, kapka se udrží, je-li nerovnost opačná, kapka se rozptýlí
– kapka kapaliny na pevné podložcev rovnováze platí |γgs| = |γls| > |γgl|cos ϑ (směr vektorů γgs a γlsje dán povrchem pevné fáze a nemění se, mění se jen vektor γglcharakterizovaný krajovým úhlem ϑ)
⇒ je-li ϑ menší než 90°, kapalina příslušnou pevnou fázi smáčí (voda/sklo)
⇒ je-li ϑ větší než 90°, kapalina danou pevnou fázi nesmáčí(rtuť/sklo)
Kapilární jevy– při ponoření úzké trubice malého vnitřního průměru (kapiláry) svisle do kapaliny v široké nádobě dochází
k zakřivení povrchu kapaliny v trubici a jejímu vzestupu či snížení vzhledem k hladině kapaliny v nádobě
vzestup hladiny v kapiláře nastává, smáčí-li kapalina povrch kapiláry a nazývá se kapilární elevacepovrch kapaliny v kapiláře je dutý
nesmáčí-li kapalina povrch kapiláry, nastává pokles hladiny – kapilární depresepovrch kapaliny v kapiláře je vypouklý
– jevy jsou důsledkem interakce molekul kapaliny s molekulami vnitřního povrchu kapiláry
Kapilární tlak– kapilární tlak je příčinou změn výšky hladiny v kapilárách
– kapilární elevace – těsně pod dutým povrchem je vnitřní tlak menší než těsně pod rovinným povrchem kapaliny v okolí kapiláry; rozdíl tlaků reprezentuje kapilární tlak
⇒ kapalina vystoupí v kapiláře do takové výšky h, aby hydrostatický tlak odpovídající tomuto sloupci vyrovnal rozdíl vnitřní tlaků
– kapilární deprese – opačný efekt, těsně pod vypuklým povrchem v kapiláře je vnitřní tlak větší než těsněpod rovinným povrchem kapaliny v okolí kapiláry, opět o kapilární tlak
⇒ kapalina klesne v kapiláře o takovou výšku, aby byl kapilární tlak kompenzován
– pro volný povrch kapaliny kulového tvaru je kapilární tlak pk dán vztahem
– kapalina o hustotě ρ v kapiláře o poloměru R vystoupí (poklesne) do výšky
γ=
2kp
r
γρ
=2h
R g
Viskozita– protéká-li kapalina trubicí, nepohybují se všechny částice
stejnou rychlostí – částice v těsné blízkosti stěny trubice se nepohybují prakticky vůbec, částice vzdálenější se pohybují rychleji
– kapalina je „složena“ ze souosých vrstviček, z nichž každáje charakterizována tím, že všechny částice v ní majístejnou rychlost
– dvě sousední vrstvičky kapaliny se pohybují různou rychlostí a vzájemně se ovlivňují vnitřním třením, které je příčinou viskozity kapaliny
– má-li se kapalina pohybovat, musí na ni působit tečné napětí, které způsobí, že se souosé laminárnívrstvičky posunou oproti ostatní vrstvičkám v jeho směru – je to síla vztažená na jednotku plochy posunuté vrstvičky
– celková síla , která překoná vnitřní tření vrstviček o stykové ploše S způsobí, že vrstvičky vzdálené o dx se pohybují rychlostmi lišícími se o
je tečné napětí, η je koeficient viskozity – pro kapaliny charakteristická veličina a silně závisející na teplotě
Fdv
η τ η= =resp.d d, d d
v vF Sx x
τ
– difuze – samovolné pronikání molekul z oblasti vyšší koncentrace do oblasti nižší koncentrace vlivem vlivem tepelného pohybu částic a jejich srážek (atomy, molekuly, skupiny molekul, micely, …)
jedná se o přenos látek proti gradientu koncentrace
difuzí se uskutečňují všechny mezifázové procesy (vznik roztoků, absorpce plynů, atd.)
difuze probíhá ve všech třech skupenstvích
– tepelná difuze – difuze, která nastává v homogenní směsi dvou tekutin, jestliže termodynamická teplota není ve všech místech stejná
– transfuze – vzájemné pronikání molekul plynů órovitými stěnami nebo blanami, které plyny oddělují, i když je tlak na obou stranách stěny stejný; je způsobena tepelným pohybem molekul
– osmóza – samovolné pronikání kapaliny přes polopropustnou membránu (propustná pro molekuly rozpouštědla; průnik molekul kapaliny trvá do ustavení rovnováhy (vyrovnání koncentrací)
– osmotický tlak – značka Π, přetlak potřebný k udržení osmotické rovnováhy mezi roztokem a čistým rozpouštědlem odděleným polopropustnou membránou propustnou pouze pro rozpouštědlo
pro velmi zředěné pravé roztoky neelektrolytů platí van‘t Hoffův zákon
pro elektrolyty je třeba brát v úvahu koncentrace disociovaných iontů
Π = = BB B
nc RT cV
STRUKTURA A VLASTNOSTI PEVNÝCH LÁTEK
– atomy, resp. molekuly zaujímají „fixní“ strukturu; látky v pevném skupenství jsou mechanicky pevné, mají stálý tvar, objem, oproti kapalné fázi většinou vyšší hustotu, atd.
– krystalické látky – částice jsou uspořádány v pravidelné struktuře
amorfní látky – uspořádání částic je nepravidelné
tekuté krystaly – látky s charakterem kapaliny, mající však pravidelnou vnitřní strukturu a jevícíněkteré vlastnosti typické pro pevné krystalické látky
– pravidelné vnitřní uspořádání krystalických látek se většinou navenek projevuje pravidelným krystalovýmtvarem a anizotropií fyzikálních vlastností (index lomu, pružnost, stlačitelnost, tepelná a elektrickávodivost, atd.)
– amorfní látky jsou izotropní
Typy krystalových struktur
– podle druhu částic tvořících krystalové struktury a charakteru soudržných sil mezi nimi se rozlišují čtyřizákladní typy krystalových struktur – iontové, atomové, molekulové a kovové
Iontové krystaly– jsou tvořeny pravidelně se střídajícími kationy a aniony, navzájem přitahovanými elektrostatickými
přitažlivými silami
– přitažlivé síly nejsou směrově orientovány, působí všemi směry rovnoměrně – nelze tedy hovořit o vazběmezi dvěma konkrétními opačně nabitými ionty a krystal se chová spíše jako „jediná“ molekula
– coulombické přitažlivé síly jsou poměrně velké – iontové krystaly jsou málo těkavé, jsou poměrně tvrdéa křehké, mají vysoké teploty tání a varu
– sloučeniny jsou obvykle dobře rozpustné v polárních rozpouštědlech, přičemž se ionizují, v důsledku volného pohybu iontů jsou roztoky elektricky vodivé
– vzhledem k tomu, že interakce v krystalu nejsou orientované, je struktura krystalu determinována pouzepoměrem počtů jednotlivých druhů iontů (a jejich náboje) a jejich poměrnou velikostí – ta určujegeometrii, resp. koordinační číslo
– základní buňka krystalu chloridu sodného
Atomové krystaly– jsou složeny z atomů, které jsou navzájem spojeny kovalentními vazbami – krystal tvoří „jedinou“
molekulu
– energie kovalentní vazby je obvykle vysoká – krystaly se vyznačují značnou tvrdostí, látky které je tvořímají vysoké teploty tání a varu, jsou prakticky nerozpustné ve vodě i ostatních rozpouštědlech
Molekulové krystaly– krystaly jsou tvořeny z jednotlivých molekul složených z konečného počtu
– molekuly jsou vzájemně vázány van der Waalsovými silami nebo vodíkovými můstky
– krystaly jsou měkké, látky z nichž jsou složeny mají nízké teploty tání i varu
– při normální teplotě jsou tyto látky obvykle plynné nebo kapalné, pouze v případě silně polarizovatelnýchmolekul se za normálních podmínek vyskytují v pevném stavu
– van der Waalsovy síly nejsou směrově orientovány – uspořádání molekul v krystalu se v podstatě řídígeometrickými faktory
– krystal jodu
Krystaly s kovovou vazbou– základní skelet je tvořen kationy kovu, mezi kterými se relativně volně pohybují valenční elektrony všech
atomů kovu
– volná pohyblivost elektronů je příčinou výborné tepelné a elektrické vodivosti kovů
– krystalická struktura se odvozuje z představy optimálního skládání koulí
Vrstevnaté krystaly– mohou vznikat v případě sloučenin, které obsahují malé kationty s vyšším nábojem a snadno
polarizovatelné anionty
– krystaly se skládají z rovin obsazených pouze kationy, ke nimž oboustranně přiléhají vrstvy složenépouze z anionů
struktura jodidu kademnatého
struktura grafitu Polymorfie a izomorfie– látka stejného složení může existovat v závislosti na vnějších podmínkách existovat v různých
krystalových formách – polymorfie, v případě prvků alotropie– každá krystalická forma polymorfní látky existuje jen v jistém rozmezí tlaku a teploty
– některé látky s podobnou chemickou strukturou vytvářejí krystaly takřka shodného tvaru, které příslušejído stejné krystalografické soustavy – tyto látky se označují jako izomorfní (jev se nazývá izomorfie)např. MgSO4.7H2O x ZnSO4.7H2O x FeSO4.7H2O
– charakteristickou vlastností izomorfních látek je schopnost vytvářet směsné krystaly, ve kterých se jednotlivé složky zastupují v prakticky libovolných poměrechnapř. směsné kamence – K(Al, Cr)(SO4)2.12H2O
Deformace pevných těles– působením sil na reálné pevné těleso dochází ke změně jeho tvaru nebo objemu – deformaci
pružná (elastická) deformace
tvárná (plastická) deformace
– těleso může být dle povahy působících sil deformováno tahem, tlakem, ohybem, smykem a kroucením
– je-li pevné těleso deformováno tahem silami o velikosti F, vyvolává struktura tělesa v rovnovážném stavu stejně velké síly pružnosti Fp, které působí proti deformujícím silám
– míru ochoty tělesa se vracet do původní polohy charakterizuje normálové napětí σn
jednotkou normálového napětí je Pa
při F = Fp (rovnovážný stav), lze velikost normálovéhonapětí určit z velikostí sil na těleso působících
– mez úměrnosti σu – deformace tahem, největší hodnota normálového napětí pro kterou ještě platíHookův zákon
Hookův zákon – normálové napětí je přímo úměrné relativnímu prodloužení
– mez pružnosti σe – nejvyšší hodnota normálového napětí, kdy je deformace tlakem ještě pružnápři jeho překročení se deformace stává trvalou
– mez kluzu σk – nejvyšší hodnota normálového napětí, při které deformace narůstá aniž by se napětízvyšovalo
– mez pevnosti σp – nejvyšší hodnota nejvyšší normálového napětí, při které deformace ještě narůstá;následuje pokles napětí a porušení soudržnosti
– dovolené napětí – nejvyšší přípustná hodnota normálového napětí při deformaci tahem nebo tlakem
jeho velikost je volena zpravidla výrazně nižší než je mez pevnosti
podíl meze pevnosti a dovoleného napětí je tzv. koeficient bezpečnosti
σ = pn
FS
Teplotní roztažnost látek– jev projevující se tím, že při změně teploty látky dojde ke změně jejího objemu (objemová teplotní
roztažnost) a u pevných těles také jejich délkové rozměry (délková teplotní roztažnost)
– objemovou roztažnost látky charakterizuje její teplotní součinitel objemové roztažnosti αv
– délkovou roztažnost látky charakterizuje její teplotní součinitel délkové roztažnosti αv
– skupenské teplo – teplo přijaté nebo odevzdané soustavou při izotermické změně skupenství za stálého tlaku
– tání – změna skupenství pevné látky v kapalnou, která nastává při určité teplotě za daného vnějšího tlaku, přijímá-li látka teplo
teplota tání Tt – pro čisté krystalické látky je za definovaných fyzikálních podmínek konstantou
interval měknutí – amorfní látky
měrné skupenské teplo tání lt – teplo, které přijme homogenní pevné těleso o hmotnosti 1 kg zahřáté na teplotu tání při daném tlaku, aby změnilo skupenství za téže teploty a tlaku (tabelovaná veličina)
– tuhnutí – změna skupenství kapalné látky v pevnou (opačný děj k tání); nastává, odevzdává-li kapalina teplo za daného vnějšího tlaku při určité teplotě nazývané teplota tuhnutí
měrné skupenské teplo tuhnutí lt– vypařování – změna skupenství kapalné látky v látku plynnou při teplotě nižší než je teplota varu při
daném tlaku
nastává na volném povrchu kapaliny při každé teplotě; při vypařování přijímá kapalina teplo z okolí
var – tlak nasycených par nad kapalinou se rovná tlaku vnějšímu, k vypařování dochází v celém objemu kapaliny
Skupenské změny – fázový diagramFyzikální pole (pole)– nositel a zprostředkovatel vzájemného působení (M. Faraday, 1852)
– každému druhu vzájemného působení je připisováno pole, v němž se vzruch šíří konečnou rychlostía je s ním spojen přenos energie, hybnosti, apod.
stacionární pole – jeho charakteristické veličiny jsou v dané vztažné soustavě nezávislé na čase
nestacionární pole – jeho charakteristické veličiny jsou v dané vztažné soustavě na čase závislé
Elektrické pole (pole)
– fyzikální pole vyvolávané elektricky nabitým tělesem nebo časově proměnný magnetickým polem
– prostor, ve kterém se projevuje působení elektrické síly
– složka elektromagnetického pole
– elektrický náboj – značka Q; vlastnost hmotných objektů, která je spojována se vznikem vzájemného působení mezi těmito objekty, jednotka [Q] = A.s = C (coulomb)
je vázán na hmotnou částici (těleso) – elektricky nabitá tělesa
– elektrický náboj je kvantován ⇒ jednotkový (elementární) náboj – 1,602 176 462(63) x 10-19 Ccelkový elektrický náboj (kladný i záporný) je vždy celistvým násobkem náboje elementárního
– zákon zachování elektrického náboje – v izolované soustavě se celkový náboj zachovává
ELEKTROSTATIKA A ELEKTŘINA
Elektrostatické pole – speciální případ stacionárního pole (časově neměnného pole), v němž se elektricky nabité částice
nepohybují (nevyskytují se v něm elektrické proudy)
– Coulombův zákon (1785) – vyjadřuje vztah mezi elektrickým nábojem a elektrickou silou
kde ε je permitivita prostředí a r vzdálenost mezi náboji
směr elektrické síly určuje polarita nábojů – opačné náboje se přitahují, souhlasné odpuzují
– intenzita elektrického pole – značka , veličina vyjadřující účinky síly na nosič náboje q
směr intenzity elektrického pole je určen tečnou k siločářev daném místě elektrického pole, orientace je ve směru od kladného k zápornému náboji (dohodnuto)
v homogenním elektrickém poli má intenzita ve všech místech stejnou velikost i směr
elektrické pole vzniklé složením dílčích elektrických polí soustavy N nábojů platí princip superpozice
πε πε= = = − = 1 21 2
1 22 2resp.1 1
4 4e e e e
Q QQQF F r F Fr r
eFE
= eFEQ
= + + +1 2 ... NE E E E
Elektrické siločáry– orientované křivky, které mají ve všech bodech (kde ) tečnu ve směru , vystupují z nosičů
kladného elektrického náboje a vstupují do nosičů záporného elektrického náboje, případně začínajínebo končí v nekonečnu; jejich hustota je úměrná silovým účinkům pole
≠ 0E EElektrický potenciál– značka ϕ, skalární veličina vyjadřující potenciální energii jednotkového elektrického náboje ve
stacionárním elektrickém poli, tedy množství práce potřebné pro přenesení jednotkového elektrického náboje ze vztažného bodu, kterému je přisouzen nulový potenciál (zpravidla nekonečně vzdálený bodnebo zemský povrch), do daného místa
potenciál bodového náboje
kde a ϕ0 hodnota potenciálu v nekonečnu (zpravidla je nulový)
elektrický potenciál je tedy číselně roven potenciální energii jednotkového náboje v daném místě
– ekvipotenciální hladina (plocha) – hladina v jejíchž všech bodech je elektrický potenciál konstantní
Elektrické napětí
– značka U, veličina vyjadřující rozdíl potenciálů dvou bodů v prostorujednotka [U] = J.C-1= kg.m2.s-3.A = V (volt)
– práce vykonaná elektrickou silou při přemísťování kladného jednotkového elektrického náboje mezi dvěma body (hladinami) v prostoru
W je práce vykonaná při přenesení náboje
ϕ = PEQ
( )ϕ ϕπε
= + 01
4Qrr
r
( ) ( )ϕ ϕ= − = =∫2
1
1 2 ad r
r
U r r E l W UQ
– vodič – látka, která obsahuje nosiče volného náboje
vodiče 1. třídy – obsahují volné elektrony (kovy)
vodiče 2. třídy – roztoky elektrolytů a ionizované plyny
– dielektrikum (izolant) – látky se silně vázanými nosiči elektrického náboje – ve vnějším elektrickém poli se nemohou pohybovat
– elektrický dipól – soustava dvou seskupení nosičů náboje shodné velikosti q a opačné polarity, jejichžtěžiště jsou ve vzdálenosti ve vzdálenosti orientované od těžiště záporného náboje k těžišti nábojekladného (nerovnoměrné rozdělení náboje, např. v polárních molekulách)
polární molekula – molekula působící navenek jako trvalý (permanentní) elektrický dipól
nepolární molekula – molekula, ve které těžiště kladného a záporného náboje splývají
l
p =p Ql
Elektrická polarizace– děj, při kterém dochází ke změně rozložení nosičů vázaného náboje – vzniká nebo se mění elektrický
dipólový moment
vázaný (polarizační) náboj – elektrický náboj nosiče, který se nemůže volně pohybovat (makroskopicky),může se přemisťovat pouze na úrovni atomární (molekulární)
– atomová (elektronová) polarizace – deformace elektronového obalu atomů – vzájemné posunutí těžištěkladného elektrického náboje jádra a těžiště záporného náboje elektronů
iontová polarizace – přeměna nepolárních molekul v polarizované molekuly navenek se projevující jako elektrické dipóly
orientační polarizace – natáčení polárních molekul vlivem vnějšího elektrického pole doprovázenázměnou dipólového momentu
– polarizovatelnost – veličina kvantifikující míruschopnosti elektrické polarizovatelnosti atomunebo molekuly
– elektrická kapacita – značka C, skalární veličina kvantifikující schopnost vodiče jímat a akumulovat volný náboj, jednotka [C] = C.V-1 = F (farad)
– kondenzátor – vodič upravený tak, aby měl velkou kapacitupasivní elektrotechnická akumulační součástka používaná v elektrických obvodech k dočasnému uchování elektrického náboje, a tedy i potenciální elektrické energie
deskový kondenzátor – soustava dvou plochých vodičů oddělenýchvrstvou dielektrika
při připojení desek kondenzátoru o kapacitě C, tak aby mezi nimibylo napětí U, bude pro hromadící se náboj platit
kapacita kondenzátoru C závisí na vzdálenosti desek d, obsahu účinnéplochy S a permitivitě dielektrika ε
energie kondenzátoru
ϕ=
QC
= ⋅Q C U
ε εε= = r oSSC
d d
= = =2
21 1 12 2 2c
QE UQ CUC
– zapojení kondenzátoru
– nabíjení kondenzátoru – po zapojení kondenzátoru do obvodu se zdrojem stejnosměrného napětí se na jeho deskách hromadí elektrický náboj – dochází k nabíjení, které je ukončeno vyrovnáním elektrickéhopotenciálu na každé z desek s potenciálem příslušného pólu zdroje.
– vybíjení kondenzátoru – desky kondenzátoru se vodivě propojí a elektrický náboj z desek se odvede, dochází k vybíjení, které vyvolá v obvodu elektrický proud.
v obvodu střídavého proudu se kondenzátor střídavě nabíjí a vybíjí
– typy kondenzátorů – vzduchové, fóliové, keramické, elektrolytické, olejové, …
– využití – fotografický blesk, defibrilátor, počítačové paměti, stabilizátory elektrických obvodů, atd.
= +1 2C C C = +1 2
1 1 1C C C
Elektrický proud– značka I, skalární veličina popisující uspořádaný pohyb nosičů elektrického náboje
jednotka [I] = A (ampér) – základní jednotka SI
1 ampér je stálý elektrický proud, který při průchodu dvěma přímými rovnoběžnými nekonečně dlouhými vodiči zanedbatelného kruhového průřezu umístěnými ve vakuu ve vzájemné vzdálenosti 1 metr vyvolámezi nimi stálou sílu 2.10-7 N na 1 metr délky vodiče
dohodnutým směrem proudu (technický směr proudu) je směr pohybu od kladného pólu k zápornému pólu (elektrony se ve skutečnosti pohybují opačným směrem)
– velikost elektrického proudu odpovídá množství kladného elektrického náboje Q přeneseného za dobu t
– zdroje elektrického proudu – zařízení přeměňující určitý druh energie na energii elektrickou
chemické zdroje (galvanické články) – využití chemické energie (alkalický článek, olověný akumulátor,…)
mechanické zdroje – využití mechanické energie (dynamo, alternátor)
tepelné zdroje (termočlánky), fotovoltaické články (energie elektromagnetického záření), palivové články
– měření elektrického proudu – ampérmetr, sériové zapojení
Δ →
Δ Δ= = =
Δ Δ0
d, resp. limdt
Q Q QI It t t
Elektrický proud ve vodičích– schopnost vést elektrický proud je podmíněna uspořádáním vnitřní struktury látek
– vodiče prvního druhu – elektrony valenční sféry mohou být snadno excitovány a delokalizovány vkrystalové mřížce kovu – vzniká soubor kladně nabitých iontů kovu a volných elektronů (elektronový plyn)
připojením vodiče ke zdroji napětí se pohyb elektronů usměrní a směřuje od záporného ke kladnémupólu
– při konstantní teplotě je proud vodičem procházející přímo úměrný napětí mezi oběma konci vodiče
konstantou úměrnosti je elektrický odpor R (Ohmův zákon)jednotka [R] = V.A-1 = kg.m2.s-3.A-2 = Ω (ohm)
elektrický odpor vzniká jako důsledek vzájemných interakcí nosičů náboje a jejich atomárního nebomolekulárního okolí
– elektrická vodivost – značka G, veličina vyjadřující schopnost vodiče vést elektrický proud, má obdobný význam jako elektrický odpor, jednotka [G] = Ω-1 = S (siemens)
– velikost odporu vodiče je závislé na jeho složení (materiálu),jeho délce l a na jeho průřezu S
ρ je měrný elektrický odpor – materiálová konstanta
= ⋅U I R
=1GR
ρ=lRS
– teplotní závislost elektrického odporu – s rostoucí teplotou elektrický odpor roste a v poměrně velkém rozsahu teplot je takřka lineární
α je teplotní součinitel odporu (vyjadřuje, jak se změní odpor vodiče při nárůstu teploty o 1 °C), Δt je teplotní rozdíl a R0 odpor vodiče při výchozí teplotě
– při teplotách blížících se absolutní nule může měrný odpor v důsledku zpomalení pohybu částicvázaných v krystalové mřížce poklesnout téměř k nule – supravodivost
– rezistor - je pasivní elektrotechnická součástka projevující se v elektrickém obvodu v ideálním případěpouze elektrickým odporem
využívá se ke snížení velikosti elektrického proudu nebo získání určitého úbytku napětí
– zapojení rezistorů
( )α= + ⋅ Δ0 1R R t
= +1 2R R R= +
1 2
1 1 1R R R
Kirchhoffovy zákony– zákony o rozvětvení elektrického proudu a o rozložení elektrického potenciálu v elektrických obvodech
– uzel elektrického obvodu – místo v obvodu, kde se stýkají minimálně tři vodiče
větev elektrického obvodu – část obvodu mezi dvěma uzly
síť – rozvětvený obvod s více zdroji napětí
– 1. Kirchhoffův zákon – celkový stacionární proud vstupující do uzluje nulový
– 2. Kirchhoffův zákon – součet elektromotorických napětí jednotlivých
zdrojů se rovná součtu úbytků napětí na jednotlivých odporech
– obou zákonů se využívá při konstrukci obvodů s více větvemi a zdroji elektrického napětí
Práce elektrického proudu
– při přenesení náboje Q mezi svorkami zdroje o napětí U se koná práce W
=
=∑1
0N
kk
I
= =
=∑ ∑1 2
1 1
N N
k k ek j
R I U
= ⋅ = ⋅ ⋅ = ⋅ ⋅ = ⋅ = ⋅ = ⋅ =2 2
2 2 a U UW U Q U I t R I t t P U I R IR R
Pásový model elektrických vlastností krystalických látek– energetické spektrum modelu tvoří střídavě pásy dovolených energií a pásy zakázaných energií
– dovolené pásy vznikají delokalizací molekulových orbitalů
– klíčová je poloha valenčního pásu a jeho obsazení elektrony (energeticky nejvýše položený pás), poloha dalšího volného vodivostního pásu a šířka pásu zakázaného
– dle obsazení valenčního a vodivostního pásu, a šířky zakázaného pásu látky dělíme na izolanty, vodičea polovodiče
vodič izolant polovodič
Polovodiče– látky, které mají zakázaný pás mezi vodivostním a valenčním pásem relativně malý
– při nižších teplotách se tyto látky chovají jako izolanty – vodivostní pás je neobsazen energetické
při vyšších teplotách dochází k excitaci elektronů do vodivostního pásu, vzniká pár volný elektron – díra,a látka se stává vodivou
– vlastní polovodič – krystalická látka bez příměsí
vlastní vodivost – vodivost vlastního polovodiče, její příčinou je přítomnost elektronů ve vodivostníma děr ve valenčním pásu
– příměsový polovodič – krystalická látka s relativně malou příměsí vhodné jiné látky
donor – příměsová látka mající oproti vlastnímu polovodiči přebytek valenčních elektronů, vytvářídodatečnou hladinu v zakázaném pásu v blízkosti pásu vodivostního
akceptor - příměsová látka mající oproti vlastnímu polovodiči nedostatek valenčních elektronů, vytvářídodatečnou hladinu v zakázaném pásu v blízkosti pásu valenčního
vodivost typu N – vodivost polovodiče s donorovou příměsí, je způsobena přebytkem elektronů ve vodivostním pásu (vznikl přechodem elektronu z donorové hladiny)
vodivost typu P – vodivost polovodiče s akceptorovou příměsí, je způsobena přebytkem děr ve valenčním pásu (vznikl přechodem elektronů z valenčního pásu na akceptorovou hladinu)
– PN přechod – nehomogenní polovodič, jehož jedna část je tvořena polovodičem typu P a druhá polovodičem typu N,a obě oblasti jsou vytvořeny na jednom polovodiči
v místě kontaktu dochází k difúzi děr z polovodiče typu P do polovodiče typu N a elektronů z polovodiče typu N do polovodiče typu P – ustaví se dynamická rovnováha a vznikne vnitřní elektrické pole
– zapojení PN přechodu – polovodičová dioda
propustný směr – je-li polovodič typu P připojen ke kladnému pólu zdroje a polovodič typu N k pólu zápornému, dochází v polovodiči typu P k tvorbě děr a do polovodiče typu N jsou dodávány elektronyvnější pole uvádí do pohybu díry v oblasti P a elektrony v oblasti N směrem k přechodu a je umožněn průchod proudu
závěrný směr – k vytváření děr, dodávání elektronů a rekombinaci na PN přechodu nedochází
– PN přechod vede proud pouze jedním směrem (diodový jev)
– usměrňovače střídavého proudu, pojistky proti změně polarity, …
propustný směr závěrný směr
– PNP a NPN přechod – tranzistory
tranzistory jsou tvořeny krystalem polovodiče se dvěma PN přechody v zapojení PNP nebo NPN
střední část se nazývá báze, PN přechody ji oddělují od oblastí s opačným typem vodivosti – kolektorua emitoru (zdroj volných nosičů náboje)
tranzistory se využívají jako zesilovače – na bázi je přivedeno napětí, čímž jsou elektrony převedeny z pásu valenčního do vodivostního – přechod NPN se stane vodivým, přičemž kolektorový proud jemnohem větší než malý proud v bázi
z obvodového hlediska se zpravidla jedná o tzv. dvojbran – vstupní brána je mezi vývody báze a emitoru,výstupní brána mezi vývody kolektoru a emitoru
Elektrický proud v kapalinách– většina kapalin v čistém stavu elektrický proud nevede
– rozpouštění látek v roztoku – neelektrolyty, pravé elektrolyty, potenciální elektrolyty
neelektrolyty – látky nízkomolekulárního charakteru v jejíchž molekulách se uplatňují nepolární nebo slabě polární kovalentní vazby, při přechodu do roztoku se výrazně nemění atomová ani elektronovástruktura; interakce s molekulami rozpouštědla je zprostředkována slabými van der Walsovými silami
pravé elektrolyty – iontové sloučeniny u nichž při rozpouštění dochází pouze k rozpadu kondenzovanéhoiontového systému a k rozptýlení iontů mezi molekuly rozpouštědla
potenciální elektrolyty – elektrolyty mající molekulární strukturu, v kondenzovaném skupenském stavu se vyskytují v podobě molekul s polární kovalentní vazbou; při přechodu do roztoku se jejich molekuly ionizují a posléze rozptylují mezi molekuly rozpouštědla
Elektrolýza– elektrolyty jsou vodiče druhé třídy – náboj je přenášen migrací iontů v elektrickém poli
– elektroda – vodič první třídy (kov), kterým je do elektrolytu přiváděn elektrický nábojkatoda – elektroda, kterou jsou elektrony do soustavy přiváděnyanoda – elektroda, jíž jsou elektrony ze soustavy odváděny
– směr elektrického proudu je konvenčně dán směrem přenosu kladných nábojů (je opačný než směr pohybu elektronů)
– v místech styku vodičů první a druhé třídy dochází při průchodu elektrického proudu k chemickýmzměnám – na katodě je z vnějšku přiváděný elektron předán iontu nebo molekule v roztoku
⇒ na katodě dochází vždy k redukci látek: ox + z e- ↔ red
⇒ na anodě dochází vždy k oxidacii látek: red ↔ ox + z e-
– uvedené děje nemohou probíhat izolovaně – vždy proběhne oxidační i redukční děj současně
1. Faradayův zákon– množství látky přeměněné při elektrolýze na elektrodě vyjádřené hmotností m je přímo úměrné prošlému
náboji
A je elektrochemický ekvivalent, který udává množství látky vyloučené proudem 1A za dobu 1s
2. Faradayův zákon
– látková množství vyloučená stejným nábojem jsou pro všechny látky chemicky ekvivalentní
– k vyloučení M/z kterékoliv látky (M je molární hmotnost, z nábojové číslo iontu) je zapotřebí shodného
elektrického náboje, který je reprezentován Faradayovou konstantou (96 485,341 5(39) C.mol -1)
= ⋅ = ⋅ ⋅ m A Q A I t
= ⋅ = =a AA
M MF N e AzeN zF
Elektrodové rovnováhy– v širším významu pojem elektroda zahrnuje soustavu tvořenou vodičem prvního s druhého druhu, mezi
kterými může probíhat elektrodový děj
– elektrodový děj je spojený s přenosem náboje – přes fázové rozhraní se přenášejí buď elektrony neboionty ⇒ tato soustava se nazývá poločlánek
při ponoření kovu do elektrolytu se projeví snaha kovu se rozpouštět (do roztoku přecházejí ionty kovu), odpovídající množství elektronů zůstává v pevné fázi
Cu(kov) ↔ 2e-(kov) + Cu2+(roztok)
kationy z roztoku mají naopak tendenci se včlenit do krystalové struktury kovu
Cu2+(roztok) + 2e-(kov) ↔ Cu(kov)
na fázovém rozhraní se ustaví rovnováha
Cu(kov) ↔ 2e-(kov) + Cu2+(roztok)
Příklad: kov ponořený do roztoku elektrolytu obsahujícího kationy tohoto kovu
Galvanické články– spojením dvou vhodných poločlánků lze získat galvanický článek schopný produkovat elektrickou práci
katoda – elektroda, kterou jsou elektrony do soustavy přiváděnyanoda – elektroda, jíž jsou elektrony ze soustavy odváděny
– vnitřní okruh článku je tvořen dvěma kovy (které nejsou v přímém kontaktu) a elektrolytovým systémem (může být jeden společný nebo má každý poločlánek elektrolyt svůj)
– ve vnějším okruhu je zařízení k odběru elektrické práce nebo měřící zařízení
– je-li článek v termodynamické rovnováze (není odebírán proud), je změřený potenciálový rozdíl roven rovnovážnému napětí článku U (elektromotorické napětí)
Akumulátory– akumulátory jsou speciálním případem článků, tzv. sekundární galvanické články, které lze po vybití
znovu nabít
– např. olověný akumulátor, alkalické akumulátory
Elektrochemická koroze
– magnetické jevy všeho druhu
– vědní obor zabývající se výkladem magnetických jevů
– magnetické pole – pole jehož zdrojem je pohybující se elektrický náboj (elektrický proud), lze jej tedydetekovat v okolí elektrických vodičů (zdrojem je volný elektrický proud) nebo kolem tzv. permanentních magnetů (zdrojem pole jsou vázané elektrické proudy)
magnetické pole může být také vyvoláno změnami elektrického pole
vírové pole (uzavřené siločáry)
projevuje se působením magnetických sil
složka elektromagnetického pole
– magnetické indukční čáry - uzavřené neprotínající se orientované křivky,jejichž tečna v daném bodě má směr vektoru magnetické indukce a jejichž hustota je úměrná velikosti vektoru magnetické indukce
rovina magnetických indukčních čar je kolmá ke směru pohybujícího se náboje (proudu) a vždy směřujíod severu (vektor magnetické indukce vychází ven z tělesa) k jihu (vektor magnetické indukce směřuje dovnitř tělesa, vychází se z obdoby s magnetickým polem Země)
Ampérovo pravidlo pravé ruky – pokud palec pravé ruky ukazuje směr elektrického proudu ve vodiči, pak pokrčené prsty ukazují orientaci magnetických indukčních čar
MAGNETISMUS
– na vodič, kterým protéká proud I, působí v homogenním magnetickém poli síla Fm
kde l je délka vodiče a α úhel sevřený vodičem a vektorem
platí pro přímý vodič
– Flemingovo pravidlo levé ruky – určuje směr působení síly Fmpoložíme-li levou ruku k vodiči tak, aby prsty ukazovaly směr proudu a indukční čáry vstupovaly do dlaněukazuje odtažený palec směr síly Fm působící na vodič
– magnetická indukce – značka B, veličina vyjadřující silové účinky magnetického pole na nosičelektrického náboje Q, jednotka [B] = N.A-1.m-1 = kg. s-2.A-1 = T (tesla)
velikost magnetické indukce závisí jen na magnetickém poli, její směr určuje tečna k magnetickým indukčním čarám, orientace je od N k S
I je proud procházející vodičem, d je vzdálenost od vodičea μ je magnetická permeabilita, μr relativní magnetická permeabilita
permeabilita vakua: μ0 = 12.566 370 614 ... x 10-7 N.A-2 = 12.566 370 614 ... x 10-7 H.m-1
– magnetická indukce ve středu proudové smyčky cívky
r je poloměr smyčky N je počet závitů cívkyL je délka cívky
α= ⋅ ⋅ ⋅sinmF B I LB
μπ
=⋅2
IBd
μ=2IBr
μ=NIBL
μ μ μ= ⋅0 r
– Ampérův zákon – zákon vzájemného silového působení dvou lineárních vodičů protékaných elektrickýmproudem (obdoba Newtonova zákona)
kde I1 a I2 jsou velikosti proudů protékajících vodiči, d je vzdálenost vodičů a L jejich délka
je-li směr proudů souběžný, vodiče se přitahují, je-li opačný, vodiče se odpuzují
pomocí Ampérova zákona je definována jednotka elektrického proudu
Chování látek ve vnějším magnetickém poli
– magnetická susceptibilita – míra schopnosti látky magnetovat se ve vnějším magnetickém poli
– magnetický dipólový moment – vektorová veličina charakterizující magnetické vlastnosti elementárních částic, atomů, molekul, zmagnetizovaných těles, ale i cívek s elektrickými proudy
velikost magnetického momentu se rovná podílu maximálního momentu síly působícího v magnetickém poli na objekt s magnetickým momentem a magnetické indukce tohoto pole.
I je proud a S obsah smyčky
μπ
⋅= ⋅1 2
2mI IF L
d
χ μ= −1m r
= ⋅m I S
Chování látek ve vnějším magnetickém poli– pohybující se nabitá částice (elektron nebo nukleon) se chová jako elektromagnet (tzn. magnetický dipól)
a přísluší mu magnetický moment
– vektorový součet magnetických momentů všech elektronů a nukleonů dané molekuly dává celkový magnetický moment
– magnetické momenty elektronových párů se navzájem ruší, k celkovému magnetickému momentu molekul přispívají pouze nespárované elektrony
stejně se projeví také nespárované protony či neutrony v jádře
– diamagnetismus – snaha látek odstínit vnitřek tělesa od vnějšího magnetického pole – jejich vlastnímagnetické pole působí proti změnám vyvolaným vnějším magnetickým polem
diamagnetické látky – látky bez permanentního magnetického momentu, χm < 0, μr < 1
– paramagnetismus – jev projevující se určitým uspořádáním magnetických momentů atomů či molekul ve vnějším magnetickým polem orientovaným ve směru tohoto pole – dochází k zesílení vnějšího pole
paramagnetické látky – látky mající permanentní magnetický dipólový moment, χm > 0, μr > 1
– ferromagnetické látky – u feromagnetických látek (Fe, Co, Ni) dochází k samovolné orientaci permanentních dipólů a jejich magnetická susceptibilita je o několik řádů vyšší než v případě látek paramagnetických, permanentní magnety, χm > > 0
ferromagnetismus silně závisí na teplotě, nad tzv. Curieovou teplotou látka přestává být ferromagnetikem
m
Elektromagnetická indukce– jev nastávající v nestacionárním magnetickém poli, které může být generováno
vodičem, který se nepohybuje, ale mění se proud, který jím prochází
pohybujícím se vodičem s proudem konstantním nebo proměnným
pohybujícím se permanentním magnetem nebo elektromagnetem
– magnetický indukční tok – značka Φ, slouží pro kvantitativní popis elektromagnetické indukce, kdyžvyjadřuje úhrnný tok magnetické indukce procházející určitou plochou
B je magnetická indukce, α je úhel, který svírá vektor magnetické indukce s normálovým vektorem plochy
– Faradayův zákon elektromagnetické indukce – určuje velikost indukovaného napětízmění-li se magnetický indukční tok uzavřeným vodičem za dobu Δt o ΔΦ, indukuje se ve vodičielektromotorické napětí
– Lenzův zákon – indukovaný elektrický proud v uzavřeném obvodu má takový směr, že svým magnetickým polem působí proti změně magnetického indukčního toku, který jej vyvolává
– pro indukovaný proud platí
αΦ = ⋅ ⋅cosB S
ΔΦ=
ΔiUt
= ii
UIR
– indukčnost – značka L, fyzikální veličina vyjadřující velikost magnetického indukčního toku kolem cívkypři jednotkovém elektrickém proudu procházejícím cívkoujednotka [L] = V.s.A-1 = kg.m2.s-2.A-2 = H (henry)
vyjadřuje schopnost cívky měnit elektrickou energii na energii magnetického pole
Φ = ⋅L I
– kmitání – je změna, typicky časová, nějaké veličiny vykazující opakování nebo tendenci k němu – mechanické kmitání – což je takový mechanický pohyb hmotného bodu (tělesa), při kterém je tento
hmotný bod vázán na určitou rovnovážnou polohu; hmotný bod se při svém pohybu vzdaluje od této rovnovážné polohy pouze do určité konečné vzdálenosti (kyvadlo, píst motoru, …)
trajektorie pohybu – úsečka, kružnice
– rovnovážná poloha – poloha,ve které má bod (těleso) nejmenší potenciální energii
– periodický kmitavý pohyb – bod (těleso) rovnovážnou polohou prochází v pravidelných intervalech;je popsán periodickými funkcemi času
perioda periodického kmitání – značka T, doba po které se jeho průběh pravidelně opakuje; [T] = s
frekvence (kmitočet) – značka f, počet opakování za jednotku času; [f] = s-1
Harmonické kmitání– časový průběh harmonického kmitání vyjadřuje funkce sinus (fázorový diagram)
– kmity lze graficky znázornit otáčejícím se amplitudovým vektorem otáčejícím se kolem zvoleného počátečního bodu s konstantní úhlovou rychlostí ωrovnající se se úhlové frekvenci daných harmonických kmitů
úhel ϕ se nazývá fáze kmitavého pohybu, jednoznačně určuje okamžitou výchylku ξ (ksí)
– pokud harmonický pohyb nezačíná v rovnovážné poloze, je třeba vzít v úvahu, že v čase t = 0 hmotný bod urazil úhel ϕ0
počáteční fáze se projeví posunem funkce sinus po časové ose
ϕω =t
( )ξ ϕ ω= ⋅ = ⋅sin sinA A t
( )=A A t
( )ξ ω ϕ= ⋅ + 0sinA t
– dva harmonické pohyby mají stejnou fázi, je-li jejich fázový rozdíl roven 2kπ radiánů, k je celé číslo
mají-li fázový rozdíl (2k+1)π radiánů, mají pohyby opačnou fázi
– rychlost harmonického pohybu – změna výchylky ξ za čas t
rychlost harmonického pohybu je největší v rovnovážné poloze, v amplitudě výchylky je nulová
amplituda rychlosti vm – nejvyšší rychlost harmonického pohybu
– zrychlení harmonického pohybu
zrychlení harmonického pohybu míří proti výchylce a maximální je v amplitudě
amplituda zrychlení am
( )ω ω= ⋅ ⋅cosv A t
ω= ⋅mv A( )ω= ⋅cosmv v t
( )ω ω= − ⋅ ⋅2 sina A t
ω= ⋅2ma A
( )ω= − ⋅sinma a t
Skládání kmitů (superpozice)– pokud hmotný bod (těleso) koná současně několik harmonických kmitavých pohybů téhož směru
s okamžitými výchylkami A1, A2, …, An, je okamžitá výchylka A výsledného kmitání rovna součtu jednotlivých výchylek
– skládají-li se pohyby se stejnou frekvencí, vznikne harmonický pohyb se stejnou frekvencí
pokud mají jednotlivé kmity frekvenci různou, vzniknou složené kmity s anharmonickým průběhem
zvláštní případ nastává, jsou-li dvě frekvence přibližně stejně velké – amplituda periodické výchylky
se periodicky zvětšuje a zmenšuje – vznikají rázy (složené kmitání), jejich amplituda se mění
s frekvencí f = f2 – f1
= + + +1 2 ... nA A A A
– celková síla vyvolávající harmonické kmitání – pohybová rovnice harmonického pohybu
– úhlová frekvence volně kmitajícího harmonického oscilátoru závisí jen na jeho vlastnostech určených jeho parametry
závaží zavěšené na pružině – parametry jsou hmotnost závaží m a tuhost pružiny k
tuhost je definována pomocí síly potřebné k prodloužení pružiny o jednotku délky; [k] = N.m-1 = kg.s-2
– úhlová frekvence vlastního kmitání oscilátoru ω0, vlastní perioda T0 a vlastní frekvence f0
ω= ⋅ = − ⋅ ⋅ = − ⋅2F m a m A k A
ω= ⋅ Δ = ⋅ 2a F k l k m
Příklad:
πω πω π
= = = = =0 0 00 0
2 1 1 2 2
k m kT fm k T m
Kyvadlo– fyzické kyvadlo – jakékoliv těleso zavěšené nad těžištěm, které se může otáčet kolem vodorovné osy
nad těžištěm
– matematické kyvadlo – myšlenkový model – hmotný bod zavěšený na tenkém vlákně se zanedbatelnou hmotností, zanedbává se rovněž odpor prostředí i deformace vlákna
– má vlastnosti mechanického oscilátoru
– perioda matematického kyvadla závisí pouze na délce závěsu a tíhovém zrychlení
kyv t – doba, za kterou kyvadlo projde z jednoho maxima do druhého; t = T/2
– energie mechanického oscilátoru (kyvadla) – skládá se z kinetické energie Ek, potenciální tíhové energieEpt a potenciální energie pružnosti Epr
při harmonickém pohybu se periodicky mění potenciální energie kmitání v energii kinetickou a naopak
celková energie oscilátoru je konstantní – je rovna součtu klidové energie oscilátoru a energie kmitánídodané při uvedení oscilátoru do kmitavého pohybu
( )= ⋅ = ⋅ = ⋅ ⋅ = ⋅ Δ22 21 1 1
2 2 2k pt prE m v k A E m g h E k l
π= 2 lTg
Tlumené a nucené kmitání– při tlumeném kmitavém pohybu působí na kmitající těleso disipativní síly (např. odpor vzduchu), dochází
k disipaci energie, tzn. celková mechanická energie kmitajícího objektu i amplituda jeho výchylky jsou klesajícími funkcemi času
– vlastní kmitání oscilátoru je vždy tlumené – mají-li být získány kmity netlumené, je nutné na oscilátor působit silou, která bude odporové síly překonávat – nucené kmitání oscilátoru
frekvence nuceného kmitání závisí na frekvenci působící síly, nezávisí na vlastnostech kmitajícího objektu
– blíží-li se frekvence nutící síly vlastní frekvenci oscilátoru, vzrůstá amplituda kmitů – dochází k rezonanci
rezonance se využívá např. u hudebních nástrojů
– vlnění – fyzikální děj, jehož podstatou je šíření určitého rozruchu látkovým prostředím nebo polem
– rozruch – lokální změna stavu látky tvořící dané prostředí nebo lokální změna stavu pole
– zdroj vlnění – hmotný objekt (těleso), který vyvolává rozruch a od něhož se rozruch šíří
– vlna – rozruch šířící se prostředím nebo polem
– mechanické vlnění – děj, při němž se rozruch (vlna) šíří látkovým prostředím; šíření vln není spojenos přenosem látky, přenáší se však energie
– příčné vlnění (transverzální vlnění) – výchylka kmitů částic prostředí je v každém bodě kolmá ke směrušíření vlnění v tomto bodě
– lineárně polarizované vlnění – zvláštní případ příčného vlnění – kmity částic prostředí ve všech bodech ležících na přímce, podél níž se vlnění šíří, dějí v přímkách navzájem rovnoběžných a kolmých ke směru šíření
– podélné vlnění (longitudinální vlnění) – kmitání každého elementu prostředí se děje podél přímky rovnoběžné se směrem šíření vlnění
– harmonické vlnění – vlna, při jejímž šíření látkovým prostředím konají jednotlivé částice prostředíharmonické kmity
– postupné vlnění – vlnění, při kterém se vlna v každém bodě prostoru šíří stále týmž směrem
MECHANICKÉ VLNĚNÍ – vlnová délka – vzdálenost dvou bodů na téže přímce, v nichž se fáze harmonické vlny v každém okamžiku liší o 2π
– vlnočet – převrácená hodnota vlnové délky
– vlnoplocha – plocha, u níž má ve všech bodech uvažovaná vlna v každém daném okamžiku t stejnou fázi
– čelo vlny – vlnoplocha, která odděluje oblast prostředí, do níž se v daném okamžiku vlna již rozšířila, od oblasti, do níž vlna v tomto okamžiku ještě nedospěla
– rychlost šíření mechanického vlnění (fázová rychlost) – závisí na vlastnostech prostředí
– okamžitá výchylka – závisí na čase t a vzdálenosti od zdroje vlnění x
rovnice postupné vlny
Interference vlnění– proces, při němž vzniká v prostředí, jímž se současně šíří dvě nebo více vln stejné fyzikální povahy,
výsledná vlna
– výsledné kmity jsou v každém bodě, do něhož se interferující vlny rozšířily, složenými kmity
– interferencí dvou stejných vlnění vzniká vlnění výsledné, jehož amplituda je největší v místech, v nichž se vlnění setkávají se stejnou fází (interferenční maximum) a nejmenší (nulová) v místech, kde se setkávajís fází opačnou (interferenční minimum)
ξ π ϕ πλ λ
⎛ ⎞ ⎛ ⎞= ⋅ − = −⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
sin2 2t x t xAT T
– o charakteru složení vln rozhoduje jejich fázový rozdíl
d – dráhový posun – fázový rozdíl vlnění je přímo úměrný dráhovému posunu
– interferenční maximum – vzniká, je-li dráhový rozdíl roven sudému počtu půlvln
– interferenční minimum – vzniká, je-li dráhový rozdíl roven lichému počtu půlvln
( )π πϕλ λ
= − =2 12 2x x d
( )λ λλ= ⋅ = ⋅ = + ⋅max min2 2 12 2i id k k d k
– stojaté vlnění – vlnění vznikající superpozicí dvou postupných vln se stejnou frekvencí, které se šířínavzájem v opačných směrech, a jejichž amplitudy jsou vyjádřeny touž funkcí souřadnic
zvláštní případ interference vlnění
kmitny – nejvíce kmitající body, uzly – nekmitající bodysousedící dvě kmitny a sousedící dva uzly jsou od se vzdáleny o λ/2
Vlnění v izotropním prostředí– izotropní prostředí – prostředí, které má z hlediska šíření vlnění ve všech směrech stejné vlastnosti
(fázová rychlost je stejná)
– Huygensův princip – každý bod vlnoplochy, do něhož dospělo vlnění v určitém okamžiku, můžeme pokládat za zdroj elementárního vlnění, které se z něho šíří v elementárních vlnoplocháchvlnoplocha v dalším časovém okamžiku je vnější obalovou vlnoplochou všech vlnoploch elementárních
– odraz vlnění – nastává, když vlnění narazí na pro ně neprostupnou plochu
zákon odrazu – úhel odrazu vlnění se rovná úhlu dopadu a odražený paprsek leží v rovině dopadu (určena dopadajícím paprskem a kolmicídopadu)
– lom vlnění (refrakce) – při přechodu vlnění z jednoho prostředí do prostředídruhého se mění směr vlnění
příčinou změny směru šíření je změna rychlosti šíření paprsku v důsledkuzměn ve vlastnostech prostředí
platí
kde nAB je index lomu pro daná prostředí (konstanta)
αβ
= =sinsin
AAB
B
v nv
– difrakce vlnění (ohyb) – jev spočívající v pronikání vlnění do oblasti geometrického stínu
stín – oblast za přepážkou,kam vlnění za předpokladu jeho přímočarého šíření neproniká
dle Huygensova principu je každé místo čelní vlnoplochy elementárním zdrojem vlnění – vlnění z míst čelní vlnoplochy poněkud vzdálených od přepážky proniká i za přepážku
– Dopplerův jev - frekvence f’ periodického vlnění, kterou zjistí pozorovatel, se liší od frekvence kmitánízdroje, od něhož se toto vlnění šíří, jestliže se pozorovatel a zdroj vůči sobě navzájem pohybují
c – velikost rychlosti šíření vlnění v daném prostředí, v1 – rychlost pohybu zdrojev2 – rychlost pohybu pozorovatele
+=
+2
1
' c vf fc v
– zvukvjem sluchového orgánu
objektivní příčina vjemu – zvukové (akustické) vlnění, tzn. mechanické elastické vlnění (podélné),jehož frekvence je v intervalu od 16 Hz do 20 kHz (práh slyšení, práh bolesti)frekvenční omezení slyšitelnosti není zvuku zapříčiněno jeho fyzikální podstatou, je dáno vlastnostmi sluchového orgánu
– zdroje zvuku – obecně tělesa přenášející chvění do okolního pružného prostředí
– akustický tlak – rozdíl mezi okamžitým celkovým tlakem prostředí a jeho statickým tlakem při šířenízvukového vlnění tímto prostředím statický tlak – tlak který by v daném místě prostředí byl, pokud by se jím nešířilo zvukové vlnění
– hladina akustického tlaku – značka Lp, bezrozměrná veličina
pef – efektivní hodnota daného akustického tlaku
p0 – referenční tlak (p0 = 2.10-5 Pa)
ve skutečnosti se používá jednotka bel (značka B) založená na vyjádřenív dekadických logaritmech
ZVUK
=0
ln efp
pLp
= =0 0
2log B 20log dBef efp
p pLp p
– rychlost zvuku – rychlost šíření zvukové vlny, závisí na prostředí a teplotě
ve vzduchu přibližně (331,8 +0,6t) m.s-1 (t = teplota)
– tón – zvuk, u nějž se akustický tlak mění periodicky nebo alespoň přibližně periodicky
tóny vznikají periodickým chvěním zdroje (struna, reproduktor, hlasivky, atd.)
– absolutní výška tónu – u jednoduchých tónu určena frekvencí f, u složených frekvencí základního tónu fzrelativní výška tónu – poměr absolutní výšky daného tónu a frekvence tónu zvoleného za základ (hudební akustika 440 Hz – komorní A, technika 1000 Hz)
– barva tónu – závisí na počtu, frekvenci a amplitudě vyšších harmonických tónů
– spektrum zvukové vlny zdroje tónu – obsahuje základní frekvenci a vyšší harmonické frekvence, kteréjsou celočíselnými násobky frekvence základní
– intenzita zvuku – značka I nebo J, veličina charakterizující jednosměrný přenos akustického výkonu Pjednotka [I] = W.m-2 = kg.s-3
ΔP je akustický výkon procházející plochou kolmou ke směru šířenízvuku, jejíž obsah je ΔS
– akustický výkon – výkon přenášený nebo přijímaný prostřednictvím zvukového vlnění
okamžitý akustický výkon procházející danou plochou při průchoduenergie ΔE za dobu Δt touto plochou
– hladina hlasitosti – pro vyšetřovaný zvuk je rovna hladině akustického tlaku čistého tónu s frekvencí1 kHz, který je považován posluchačem s normální sluchem při standardních poslechových podmínkách za stejně hlasitý jako vyšetřovaný zvuk
– hlasitost – jednotka fon, fon je hlasitost, kterou člověk vnímá při poslouchání referenčního tónu 1 kHzs hladinou akustického tlaku 40 dB
– biologický účinek hluku – hluk nad 75 dB je škodlivý, hluk nad 100 dB je vnímán jako bolest, nad 140 dBmůže dojít k poškození sluchového orgánu
infrazvuk – nebezpečné jsou frekvence shodující se biologickými rytmy (např. tep srdce)
práh slyšitelnosti – nejnižší akustický tlak, který je ještě lidským uchem vnímán
práh bolesti – ejvyšší akustický tlak, který ještě lidské ucho snese
Δ →
Δ= =
Δ0
dlimdS
P PIS S
Δ →
Δ= =
Δ0
dlimdt
E EPt t
– elektromagnetické pole – časově proměnné pole ze dvou fyzikálně propojených polí – elektrického a magnetického, časově proměnné pole s nekonečným dosahem
– elektromagnetická interakce – jedna ze čtyř základních interakcí; předpokladem pro její působení je existence elektrického náboje nebo magnetického momentu u interagujícího objektu či částice
– elektromagnetická vlna – šíření časově proměnného elektromagnetického pole konečnou rychlostí(ve vakuu c = 299 792 458 m.s-1); příčné vlnění
elektromagnetické vlny jsou popsány závislostí veličin elektromagnetického pole na prostorovýchsouřadnicích a čase
šíření elektromagnetických vln je spojeno s přenosem energie, hybnosti a momentu hybnosti
– rovnice postupného elektromagnetického vlnění
– rychlost šíření elektromagnetické vlny, vlnová délka
Elektromagnetické pole– optika – obor fyziky zabývající se podstatou optického záření a zákonitostmi jevů, které nastávají při
jeho šíření a při vzájemné interakci optického záření a látky
– optické záření – elektromagnetické záření v rozsahu vlnových délek 10 nm až 1 mm; pásmo se dále
rozděluje na tři základní oblasti – oblast ultrafialového záření, oblast viditelného záření a oblast zářeníinfračerveného
neionizující záření
– světlo – elektromagnetické záření, které je vnímáno lidským okem (380 – 760 nm)
užší pásma v rámci tohoto rozsahu lidské oko vnímá jako barvy, v pořadí fialová, modrá, zelená, žlutá,oranžová a červená (v pořadí dle rostoucí vlnové délky)
– optické prostředí – část látky nebo vakua, v níž se zkoumá šíření optického záření (světla)
homogenní prostředí – optické prostředí, jehož index lomu je ve všech bodech prostředí stejný
nehomogenní prostředí
izotropní prostředí – optické prostředí, jehož index lomu je ve všech směrech stejný
anizotropní prostředí – index lomu závisí na směru šíření záření
opticky hustší / opticky řidší prostředí – při porovnání dvou prostředí z hlediska jejich schopnosti lámat
světlo, vyšší / nižší index lomu
SVĚTLO A OPTIKA – čiré prostředí – nedochází k pohlcování ani rozptylu záření
průhledné prostředí – záření je částečně absorbováno, k rozptylu nedochází
zbarvené prostředí – selektivně pohlcuje záření některých vlnových délek
šedé (až černé) prostředí – pohlcování se týká všech vlnových délek stejně
průsvitné prostředí / neprůsvitné prostředí – dle míry rozptylu záření
– lom světla – jev, kdy světlo dopadající na rozhraní dvou optických prostředí o různých indexech lomu prochází částečně z jednoho prostředí do druhého
směr lomeného paprsku je určen zákonem lomu (Snellův zákon)
– index lomu – veličina charakterizující průchod světla prostředím; je dána poměrem rychlosti světla ve vakuu c a rychlosti v jednokmitočtové světelné vlny v daném prostředí
lom ke kolmici – vA > vB, přechod z prostředí opticky řidšího do prostředíopticky hustšího
lom od kolmice – vA < vB, přechod z prostředí opticky hustšího do prostředíopticky řidšího
úplný odraz – vlnění do druhého prostředí neprochází
αβ
= = =sinsin
A BAB
B A
v n nv n
λ =cnv
– disperze světla – závislost rychlosti světla na jeho vlnové délce (frekvenci) normální disperze – rychlost s rostoucí frekvencí klesáanomální disperze – rychlost s rostoucí frekvencí narůstá (v oblasti absorpčních pásů)
– interference světla – skládání navzájem koherentních (dobře definovaných) světelných vlnprojevuje se podobnými jevy jako interference mechanických vln, např. zesilováním a zeslabováním intenzity světla v různých místech
Youngův pokus – důkaz vlnové povahy světla, vznik interferenčního obrazce
interferenční maximum
interferenční minimum
λ λ =Δ = = 1, 2, 3,...2 , 2
kd k k
( ) λ=Δ = − 1, 2, 3,...2 1 ,
2kd k
– difrakce světla – šíření světla do geometrického stínu za překážkami pro šíření (Huygensův princip)
Fraunhoferova difrakce – světlo přichází z bodového zdroje umístěného velmi daleko (nekonečně) od předmětu, tzn. dopadající vlnoplochy jsou téměř rovinné), pozorovatel je rovněž daleko od předmětu
Fresnelova difrakce – zdroj světla je v konečné vzdálenosti od předmětu (dopadající vlnoplochy nejsou ani přibližně rovinné), intenzita je zjišťována v malé vzdálenosti od předmětu
– polarizace světla – geometrická orientace kmitání vektoru intenzity elektrického pole světelné vlny, resp. činnost směřující k získání definovaného stavu kmitání
odraz, lom, dvojlom, absorpce (polaroid)
Optické zobrazování– založeno na principech paprskové optiky
1. přímočaré šíření světla – v homogenním optické prostředí se světlo šíří přímočaře, v rovnoběžných,sbíhavých nebo rozbíhavých svazcích světelných paprsků
2. zákon odrazu
3. zákon lomu
4. nezávislost chodu světelných paprsků – pro odraz i lom platí, že dopadající a odražený, respektivedopadající a lomený paprsek lze vzájemně zaměnit (obecný zákon paprskové optiky)
Zrcadla– zobrazovací prvky tvořené zpravidla kulovou odraznou optickou plochou, podle tvaru proti chodu paprsku
se třídí na vypuklá zrcadla, vydutá zrcadla a rovinné zrcadlo
o – optická osa zrcadla zobrazovací rovnice zvětšení
V – vrchol zrcadla, průsečík osy odraznou plochou zrcadla
S – střed křivosti, střed kulové plochy tvořící zrcadlo
F – ohnisko zrcadla, střed úsečky SV
r – poloměr křivosti, vzdálenost středu křivosti od vrcholu zrcadla označujeme r
f – ohnisková vzdálenost , vzdálenost ohniska od vrcholu zrcadla
+ =1 1 1
'x x f=
'xZx
Duté zrcadlo – zobrazení Duté zrcadlo – zobrazení
zvětšený, vzpřímený, zdánlivý f < x’ < ∞x < f
obraz je v nekonečnux’ → ∞x = f
zvětšený, převrácený, skutečný x’ > rf < x < r
stejně vysoký, převrácený, skutečný x’ = rx = r
zmenšený, převrácený, skutečný f < x’ < rx > r
obrazupředmětuVlastnosti obrazu
Vzdálenost
Vypuklé a rovinné zrcadlo – zobrazení Optická čočka– zobrazovací prvek tvořený obvykle skleněným prostředím ohraničeným dvěma optickými plochami ve
formě zpravidla kulových rozhraní nebo jedním kulovým a jedním rovinným rozhraním
– zobrazení se uskutečňuje prostřednictvím lomu světla na rozhraních
– optická osa čočky – spojnice středů křivosti obou ploch
vrcholy ploch – průsečíky osy s plochami
– spojná čočka (spojka, kladná čočka) – čočka s větší tloušťkou ve vrcholu než na okraji, způsobuje lom paprsků směrem k ose
rozptylná čočka (rozptylka, záporná čočka) – čočka s větší tloušťkou na okraji než ve vrcholu, způsobuje lom paprsků směrem od osy
– zobrazovací rovnice a zvětšení
– optická mohutnost, značka ϕ, jednotka [ϕ] = m-1 = D (dioptrie)
n1 – index lomu prostředí, n2 – index lomu čočkyr1 – poloměr kulové plochy čočky v předmětovém prostorur2 – poloměr kulové plochy čočky v předmětovém prostoruf – ohnisková vzdálenost čočky
+ =1 1 1
'x x f= −
'xZx
ϕ⎛ ⎞ ⎛ ⎞
= = − ⋅ +⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
2
1 1 2
1 1 11nf n r r
Typy čoček
a – dvojvypuklá čočka a-c – spojky
b – ploskovypuklá čočka d-f – rozptylky
c – dutovypuklá čočka
d – dvojvydutá čočka
e – ploskodutá čočka
f – vypuklodutá čočka
Spojka a rozptylka – zobrazení
o – optická osa čočkyV – vrcholy, průsečík osy odraznou plochou zrcadla O – optický střed čočkyF1 – předmětové ohnisko čočky, nachází se ve stejné části prostoru jako předmětF2 – obrazové ohnisko čočkyr1/r2 – poloměry křivosti optických plochf1 – předmětová ohnisková vzdálenost f2 – obrazová ohnisková vzdálenost
Spojka má obě ohniska skutečná, rozptylka má obě ohniska neskutečná.
Spojka a rozptylka – zobrazení
Duté zrcadlo – zobrazení
zvětšený, vzpřímený, zdánlivý 0 < a’ < ∞a < f
obraz je v nekonečnua’ → ∞a = f
zvětšený, převrácený, skutečný a’ > 2ff < a < 2f
stejně vysoký, převrácený, skutečný a’ = 2fa = 2f
zmenšený, převrácený, skutečný f < a’ < 2fa > 2f
obrazupředmětuVlastnosti obrazu
Vzdálenost
Zrcadla a čočky – znaménkové konvence– kulová zrcadla
všechny vzdálenosti, které se nacházejí před zrcadlící plochou, mají znaménko kladné
všechny vzdálenosti, které se nacházejí za zrcadlící plochou, mají znaménko záporné
ohnisková vzdálenost dutého zrcadla je kladná, vypuklého zrcadla záporná
vzniká-li obraz přímý, pak má velikost obrazu znaménko kladné, vzniká-li obraz převrácený, pak mávelikost obrazu znaménko záporné
– čočky
předmětová vzdálenost má vždy znaménko kladné
obrazová vzdálenost má znaménko kladné, je-li ve směru paprsků procházejících čočkou (obraz vzniká„za“ čočkou), jestliže obraz vzniká ve stejné části prostoru jako leží předmět, pak má obrazovávzdálenost znaménko záporné
ohnisková vzdálenost spojky je kladná, rozptylky záporná
vzniká-li obraz přímý, pak má velikost obrazu znaménko kladné, vzniká-li obraz převrácený, pak mávelikost obrazu znaménko záporné.
Optické přístroje– lupa – vytváří přímý, zdánlivý a zvětšený obraz prostředí, předmět se umisťuje mezi vrchol a ohnisko
– mikroskop – přístroj používající se ke zobrazení velmi malých předmětů, skládá se z objektivu a okulárupozorovaný předmět se umisťuje blízko před předmětové ohnisko objektivu, takže vzniká skutečný, zvětšený a převrácený obraz, který se nachází mezi okulárem a jeho předmětovým ohniskem
tento obraz je dále pozorován okulárem podobně jako lupou, čímž získáváme další zvětšení
zvětšení je dáno součinem zvětšení objektivu a okuláru
– dalekohled – optický přístroj určený k pozorování velmi vzdálených předmětů při zvětšení jejich úhlu zorného pole; zvětšení úhlu způsobí zdánlivé přiblížení předmětu
je tvořen objektivem a okulárem
refraktory – optická soustava je tvořena čočkou nebo soustavou čoček
reflektory – objektiv je tvořen zrcadlem
zvětšení je dáno poměrem ohniskových vzdáleností objektivu a okuláru
rovnoběžné paprsky velmi vzdáleného předmětu procházejí objektivem s velkou ohniskovou vzdálenostía v obrazovém ohnisku objektivu splývajícím s předmětovým ohniskem okuláru se vytváří obraz, kterýje okulárem pozorován pod zvětšeným zorným úhlem
Oční optika– obor optiky zabývající se stavbou a funkcí zrakového orgánu a vznikem zrakového vjemu, vadami zraku,
jejich měřením a korekcí (optometrie) a zhotovováním korekčních pomůcek
– vidění – schopnost zrakového orgánu vnímat jas a barvy, a dále tyto vjemy vyhodnotit a vytvořit představu předmětů včetně jejich barvy, kontrastu, jasu, velikosti, tvaru, pohybu a pozice v prostoru
binokulární vidění – schopnost současného vidění oběma očima (tři úrovně)
– oko – zrakový orgán, ve kterém se vytváří obraz okolního světa a dále se transformuje v nervové vjemy
optická soustava oka – rohovka, komorová voda, čočka, sklivec
zornice – otvor v duhovce měnící svoji velikost v závislosti na osvětlení (2 – 6 mm)
oční čočka – součást optické soustavy oka, mění lámavost
sítnice – v zadní části oka, složena ze tří vrstev – fotoreceptorů
gangliových buněk a bipolárních buněk
fotoreceptory – tyčinky - nebarevné vidění
čípky - barevné vidění
žlutá skvrna – obsahuje pouze čípky, místo nejostřejšího vidění
slepá skvrna – místo, kde z oka vystupuje zrakový nerv, neobsahujeani tyčinky, ani čípky
Oční vady– akomodace oka – schopnost zvětšit optickou mohutnost oka tak, aby se všechny objekty ležící mezi
dalekým a blízkým bodem zobrazili ostře na sítnici
daleký bod – bod na optické ose, který se zobrazí na sítnici oka při minimální akomodaci oka
blízký bod – bod na optické ose, který se zobrazí na sítnici při minimální akomodaci oka
– krátkozrakost (myopie) – vzniká tehdy, když daleký bod oka R je v konečné vzdálenosti před okemnormálních vlastností oko nabude použitím rozptylné čočky, jejíž obrazové ohnisko splývá s bodem R
– dalekozrakost (hypermetropie) – vzniká, je-li vzdálený bod oka R v konečné vzdálenosti za okemnormálních vlastností oko nabude pomocí spojné čočky
Metrologická optika– obor optiky zabývající se měřením optických veličin, zahrnuje nejen energetické vlastnosti, ale i vztah k
lidskému zrakovému orgánu, a barevné charakteristiky záření i těles
– radiometrie – zabývá se studiem a měřením energetických charakteristik optického záření
zdroj záření – objekt, který vysílá optické záření
zářivá energie – značka W (Q), energie vyslaná, přenesená nebo přijatá formou elektromagnetického izotropní
zářivý tok (zářivý výkon) – značka Φe (P), výkon vysílaný, přenášený nebo přijímaný jako optické záření
– fotometrie – část metrologické optiky zabývající se studiem a měřením energetických charakteristik světla posuzovaných podle jeho účinků na zrakový receptor (či jiný detektor)
světelný tok – značka Φv , fotometrická veličina udávající intenzitu zrakového vjemu normálního oka, který je vyvolán zářivým tokem Φe, Φv = KΦe (K je světelná účinnost), jednotka lm (lumen)
svítivost – značka I, základní fotometrická veličina charakterizující vysílání světla z bodového zdrojejako podíl části světelného toku ΔΦ, který vychází ze zdroje v daném směru do malého prostorového úhlu ΔΩ a velikosti tohoto úhlu, jednotka cd (candela)
– osvětlení – značka E, podíl světelného toku ΔΦ dopadající na element povrchu a velikosti plochy tohoto
elementu ΔS, jednotka lx (lux) ΔΦ ΔΦ ΔΦ= = =
ΔΩ Δ ΔΩ 2 I ES r
– kvantová fyzika – fyzika založená na kvantové teorii, zahrnuje kvantovou mechaniku, kvantovou teorii polí a kvantovou statistickou fyziku
– kvantová mechanika – zobecnění a rozšíření klasické (Newtonovy) mechaniky; stav částice není popsánpolohou a hybností, nýbrž vlnovou funkcí
pravděpodobnostní popis; kvantování – diskrétnost a nespojitost veličin
popis chování malých objektů (elementární částice, atomy, molekuly, …)
speciální matematický formalismus
KVANTOVÁ FYZIKA
klasická fyzika – I. Newtončástice – přesná lokalizace v prostoru
– pohyb po definované trajektorii– ostré vymezení povrchu
pole – šíření vzruchu prostorem– difrakční a interferenční jevy
kvantová fyzikadualismus chování hmoty - nelze jednoznačně vymezit zda se jedná o částici či vlnu (pole), přičemž jedno může přecházet v druhé
( ) ( ) ( )γ+ ⎯⎯⎯⎯⎯→anihilace- +e elektron e pozitron 2 foton
– elektromagnetické pole – časově proměnné pole ze dvou fyzikálně propojených polí – elektrického a magnetického, časově proměnné pole s nekonečným dosahem
– elektromagnetická interakce – jedna ze čtyř základních interakcí; předpokladem pro její působení je existence elektrického náboje nebo magnetického momentu u interagujícího objektu či částice
– elektromagnetická vlna – šíření časově proměnného elektromagnetického pole konečnou rychlostí(ve vakuu c = 299 792 458 m.s-1); příčné vlnění
elektromagnetické vlny jsou popsány závislostí veličin elektromagnetického pole na prostorovýchsouřadnicích a čase
šíření elektromagnetických vln je spojeno s přenosem energie, hybnosti a momentu hybnosti
– rovnice postupného elektromagnetického vlnění
– rychlost šíření elektromagnetické vlny, vlnová délka
ELEKTROMAGNETICKÉ VLNĚNÍ
πλ
⎛ ⎞= −⎜ ⎟⎝ ⎠
sin2mt xu UT
ε μ=
⋅cv
ε μ=
⋅0 0
1c λ = =ccTf
Elektromagnetické pole Problémy klasické fyziky– nesoulad experimentálně zjištěných měrných tepel některých látek (např. diamantu) s hodnotami
předpovězenými statistickou mechanikou
– vyzařování a absorpce energie „absolutně“ černým tělesem – měrné teplo elektromagnetického záření
absolutně černé těleso – ideální těleso, které pohlcuje veškeré záření všech vlnových délek,dopadajícího na jeho povrch; současně je ideálním zářičem – ze všech možných těles o stejné teplotěvysílá maximální možné množství zářivé energie (č.t. je v termodynamické rovnováze s okolím)
celkové množství energie vyzářené povrchem absolutně černého tělesa za jednotku času a rozloženíintenzity záření podle vlnových délek závisí jen na jeho teplotě
aproximace dutým tělesem s velmi malým otvorem – všechno záření vnikající do dutiny zůstává v dutiněa postupně je stěnami dutiny pohlcené, stěny dutiny neustále vysílají a pohlcují záření a záření, kteréz dutiny uniká přes malý otvor má vlastnosti blížící se záření absolutně černého tělesa
vysílané záření obsahuje elektromagnetické vlny různé vlnové délky, a množství energie záření s jistou vlnovou délkou se též mění – množství vysílané energie kvantifikuje spektrální hustota záření I(λ)
– Wienův posunovací zákon – v záření absolutně černého tělesa je maximální energie vyzařována na vlnové délce, která se s rostoucí termodynamickou teplotou snižuje (čím teplejší je těleso, tím vyzařuje na kratších vlnových délkách, resp. vyšších frekvencích):
( )λ −= ×= 3
max 2,8977685 51 10 m.K bbT
– Stefanův-Boltzmannův zákon – popisuje celkovou intenzitu záření absolutně černého tělesa
σ - Stefanova-Boltzmannova konstanta
– Rayleighův-Jeansův zákon záření absolutně černého tělesa
při snižovaní λ k hodnotám ultrafialové části spektra směřuje I k nekonečnu (nesoulad s experimentem)
ultrafialová katastrofa
σ σ −= ×= 84 -2 -45,670 400 10 W.m .K I T
( ) πλ λλ
= 48 dkTl
⇒ energie tělesa se může měnit jen po určitých celistvých násobcích elementárního kvanta energie
⇒ dualistické chování elektromagnetického záření – paralelní existence vlnění a korpuskulárních světelných kvant
Základy kvantové teorie – Max Planck (1900)
Planckovo řešení:
νλ
=
= =
-34 2 -1
Planckova konstanta
6,626 176(3
, kde j
6).10
e tzv.
kg.m .s
vcQ h
h
h h
těleso energii vyzařuje nespojitě, po tzv. kvantech, velikost tohoto elementárního kvanta energie Qvzávisí na frekvenci záření
νε
νλ
= =
= = =
22 f f
f f
hm c mc
h hp m cc
ε – energie fotonu; mf – hmotnost fotonu při pohybu
rychlostí světla c; ν , λ – frekvence, resp. vlnová délka
záření, ν = c/λ; pf – hybnost fotonu
Fotoelektrický jev – Albert Einstein (1905)
– fyzikální jev, při němž jsou elektrony uvolňovány (vyzařovány, emitovány) z látky (zpravidla kovu) v důsledku absorpce elektromagnetického záření (fotoelektrony, fotoelektrická emise)
vnější fotoelektrický jev – elektrony jsou emitovány ven z látky
vnitřní fotoelektrický jev – elektrony látku neopouštějí, zůstávajív ní jako elektrony vodivostní
Comptonův jev – Arthur Holly Compton (1923)
– pružný rozptyl fotonů na volných elektronech
– vlnová délka rozptýleného záření je delší než vlnová délka záření dopadajícího, rozdíl vlnových délek je závislý na úhlu rozptylu
– čím větší energii elektron od fotonu získá, tím méně se změnísměr jeho pohybu
Atom – elektroneutrální útvar přibližně kulového tvaru
– střed je tvořen kladně nabitým atomovým jádrem vystavěným z protonů a neutronů
– záporně nabitý obal atomu je tvořen elektrony
– náboj jádra je ve své absolutní hodnotě vždy stejný jako náboj obalu
ATOM A PRVEK
základní vlastnosti stavebních částic atomu
STRUKTURA ATOMU
John Dalton (1808)
– látky se skládají z velmi malých nedělitelných částic – atomů, navzájem vázaných přitažlivými silami
– atomy jednoho prvku jsou shodné v kvalitě, velikosti a hmotnosti, a těmito vlastnostmi se liší od prvkůostatních
– při chemickém slučování dochází ke spojení určitého počtu atomů jednoho prvku s určitým počtem atomů prvku jiného
– přirozeným důsledkem jsou zákon stálých i zákon násobných slučovacích poměrů
Démokritos z Abdér (asi 460-370 př. n. l.)
teorie atomů a prázdna – atomy jsou nepatrné, jednotlivé a dále nedělitelné částice, lišící se pouzetvarem a polohou; existují pouze atomy a prázdný prostor mezi nimi
Joseph Thomson (1898)
atom je homogenní koule tvořená kladně nabitou hmotou, v níž jsou ponořeny elektrony
– nestabilita atomu v intencích klasické mechaniky a elektrodynamiky
– čárová (nespojitá) atomová emisní spektra
– teoretická interpretace Mendělejevova periodického zákona
Planetární model atomu – Ernest Rutherford (1905)
– experiment s částicemi α (4He2+) procházejícími kovovou fólií
– hmotnost atomů je soustředěna v kladně nabitém jádře majícím oproti celému atomu nepatrné rozměry
– záporně nabité elektrony se pohybují v prostoru kolem jádra
– poloměr atomu ≈ 10-10 m; poloměr jádra ≈ 10-14 m
PROBLÉMY:
Emisní spektrum vodíku (Balmerova série čar):
Bohrův model atomu vodíku – Niels Bohr (1913)
– k vysvětlení experimentálně pozorovaných vlastností zavádí do Rutherfordova planetárního modelupodmínky kvantování
– elektron ve vodíkovém atomu obíhá okolo jádra jen po určitých kruhových drahách, na kterých jeho energie zůstává konstantní
– moment hybnosti elektronu rmev je na povolených drahách roven celistvému násobku Planckovykonstanty
π= =,
2ehrm v n r – poloměr dráhy, me – hmotnost elektronu, v – obvodová rychlost
elektronu, n – celé číslo určující pořadí elektronových drah
– elektron vyzařuje energii pouze při přechodu z jednoho stacionárního stavu s vyšší energií E′ do jiného, ve kterém má nižší energii E″, energetický rozdíl je vyzářen formou světelného kvanta – fotonu
ν− =i IIE E h
opačný vztah potom platí pro pohlcování energie atomem a přechod elektronu do stavu s vyšší energií
Změny v elektronové struktuře atomu Emisní spektrum atomu vodíku
υε
⎛ ⎞−= = −⎜ ⎟
⎝ ⎠
4
2 2 2 20
1 18
i f
f i
E E meh h n n
364,6∞
……
383,59
388,98
397,07
410,26
434,15
486,14
656,33
λ [nm]n → 2
Balmerova série
PROBLÉMY:– jemná struktura čar ve spektru atomového vodíku
– štěpení spektrálních čar účinkem silného magnetického pole (Zeemanův jev)
Emisní spektrum atomu vodíku
υε
⎛ ⎞−= = −⎜ ⎟
⎝ ⎠
4
2 2 2 20
1 18
i f
f i
E E meh h n n
Částicově-vlnový charakter hmoty – Luis de Broglie (1924)
λ= =p hmv
– pohyb jakékoliv částice je vždy spojen s určitým vlněním – tzv. hmotovými vlnami
– pro hybnost fotonu, resp. jakékoliv jiné částice platí vztah⇒ pohyb elektronu je spojen s hmotovou vlnou
volný elektron – postupová vlna, přípustná je jakákoliv energie
vázaný elektron – stojatá vlna, může nabývat jen zcela určitých frekvencí, resp. energií
⇒ atom může být stabilní pouze tehdy, má-li „elektronové vlnění“ na uzavřené dráze celistvý početvlnových délek; jiné vlny vlivem interference zanikají
Částicově-vlnový charakter hmoty – Luis de Broglie (1924)
⇒ čím přesněji měříme hybnost částice, tím větší nepřesnost se objeví v údaji o poloze
Heisenbergovy relace neurčitosti – Werner Heisenberg (1926)
Δ Δ ≥ Δ Δ ≥ nebo xp x h E t h
– součin každé dvojice dynamicky proměnných veličin, který má rozměr Planckovy konstanty (kg.m2.s-1),nemůže být stanoven s menší nepřesností, než je hodnota Planckovy konstanty (6,626176.10-34 kg.m2.s-1)
– není tedy možné současně přesně změřit např. polohu a hybnost částice nebo energii a čas
– princip neurčitosti je přirozeným důsledkem faktu, že částicím příslušejí vlny
– má-li mít vlnová délka/frekvence (hybnost) elektronové vlny zcela určitou hodnotu, musí se tato vlna bez omezení šířit; uzavření vlny do omezeného prostoru (pokus o lokalizaci) způsobí interferenci a snížení amplitud k nulové hodnotě
⇒ vlna o přesně známé frekvenci musí být prostorově neomezená – neznáme polohu
⇒ přesné zjištění polohy vyžaduje použití vlnového svazku různých frekvencí – neznáme hybnost
– zásadní důsledek pro výklad stability atomu, pohybu elektronu v atomu, existenci chemické vazby, atd. !!! !!!
Heisenbergovy relace neurčitosti
– princip neurčitosti je přirozeným důsledkem faktu, že částicím příslušejí vlny
– má-li mít vlnová délka/frekvence (hybnost) elektronové vlny zcela určitou hodnotu, musí se tato vlna bez omezení šířit; uzavření vlny do omezeného prostoru (pokus o lokalizaci) způsobí interferenci a snížení amplitud k nulové hodnotě
⇒ vlna o přesně známé frekvenci musí být prostorově neomezená – neznáme polohu
⇒ přesné zjištění polohy vyžaduje použití vlnového svazku různých frekvencí – neznáme hybnost
Kvantově mechanický model atomu
Erwin Schrödinger, Werner Heisenberg (1926)
– nové matematické postupy umožňující postihnout částicově vlnový dualismus hmoty a energie
E. Schrödinger – vlnová mechanika
W. Heisenberg – maticová mechanika
πψ ψ
ψ ψ
∇ + − =
=
22
2
8 ( ) 0
nebo
m E Uh
H E
Schrödingerova rovnice– obecná diferenciální rovnice formulovaná na základě analogie s rovnicemi popisujícími chování
klasických vln
– pohyb, resp. vlastnosti částice jsou v kvantové mechanice popsány vlnovou funkcí ψ, kterou lze získat řešením Schrödingerovy rovnice
π
∂ ∂ ∂∇ = + + −
∂ ∂ ∂
= − ∇ + −
2 2 22
2 2 2
22
2
Laplaceův operátor
Hamiltonův operátor
8
x y zhH U
mx, y, z – kartézské souřadnice částice; m – hmotnost částice; E, U – celková a potenciální energie částice
Atomové orbitaly– nové vlastní hodnoty energie E a vlastní vlnová funkce ψ charakterizují stav elektronu v atomu,
resp. vymezují existenční oblast elektronu v atomu, tzv. atomový orbital
– vlastní vlnová funkce každého AO je určena závislostí na souřadnicovém systému s počátkem umístěným do jádra atomu
– vlnová funkce každého AO může být vyjádřena jako součin dvou funkcí, tzv. radiální a polární(angulární) části vlnové funkce
ψ ϑ ϕ ϑ ϕ=, , , ,( , , ) ( ) ( , )l ln l m n l l mr R r Y
Atomové orbitaly– soubor vlnových funkcí, charakterizujících atomové orbitaly je dán komplikovaným matematickým
výrazem vždy obsahujícím tři druhy veličin
– některé základní fyzikální konstanty – Planckova konstanta, hmotnost elektronu, náboj elektronu, číslo π
– veličiny charakteristické pro daný systém – atomové číslo Z, souřadnice
– tři kvantová čísla – n, l, ml – vyplývající z řešení Schrödingerovy rovnice
– každá přípustná kombinace kvantových čísel definuje jediný atomový orbital (AO) !!!
Řešení Schrödingerovy rovnice poskytuje:
– vlnové funkce jednotlivých AO, charakterizované určitou kombinací kvantových čísel
– hodnoty všech energií AO, získané energie jsou vlastními hodnotami energie řešené Schrödingerovyrovnice
– průběh vlnové funkce ψ, resp. jejího čtverce ψ2 v závislosti na prostorových souřadnicích okolí jádraatomu, tedy představu rozprostření hustoty pravděpodobnosti výskytu elektronu v prostoru atomu
Kvantová čísla
– hlavní kvantové číslo n určuje energii daného AO a nabývá výhradně kladných celočíselných hodnotn = 1, 2, 3, …
vlnová funkce ψn,l,m je vlastní funkcí řešené Schrödingerovy rovnice výhradně pro tyto hodnoty čísla n
– vedlejší kvantové číslo l charakterizuje směr a tvar rozložení elektronové hustoty; u složitějších systémů (s více než jedním elektronem) ovlivňuje energii příslušného AO
nabývá n kladných celočíselných hodnot včetně nuly a je limitováno hlavním kvantovým číslem n tak, že může mít hodnotu nejvýše n – 1
l = 0, 1, 2, 3, …, n – 1, tedy například pro n = 1 ⇒ l = 0
n = 2 ⇒ l = 0, l = 1
n = 3 ⇒ l = 0, l = 1, l = 2
– magnetické kvantové číslo ml určuje orientaci AO k souřadnému systému
vlnové funkci s vedlejším kvantovým číslem l přísluší 2l + 1 hodnot magnetického kvantového čísla
ml = –l, –l + 1,…, –1, 0, 1, +l –1, +l, tedy například pro n = 2 ⇒ l = 0 ⇒ m = 0
l = 1 ⇒ m = -1, m = 0, m = 1
ψ ϑ ϕ ϑ ϕ=, , , ,( , , ) ( ) ( , )l ln l m n l l mr R r Y
Kvantová čísla– obecně se v praxi označování AO kombinací n, l, ml nepoužívá, orbitaly se označují symbolem
obsahujícím hlavní kvantové číslo n a písmeno odpovídající vedlejšímu kvantovému číslu l
l = 0 → s
l = 1 → p, ml = –1, 0, 1
l = 2 → d, ml = –2, –1, 0, 1, 2 ⇒ 1s, 2s, 2p, 3s, 3p, 3d …
l = 3 → f, ml = –3, –2, –1, 0, 1, 2, 3kvantové číslo ml se neuvádí
– orbitaly typu p, d, f, … jsou ze zřetelem k hodnotěml realizovány několikrát
⇒ v každé skupině orbitalů se stejným hlavním a vedlejším kvantovým číslem leží jednotlivéorbitaly na téže energetické hladině,
orbitaly jsou degenerované
Degenerace atomových orbitalů Elektronový spin – Wolfgang Pauli (1925)
– spektrální čáry v atomových spektrech nejsou jednoduché (podle Bohrova modelu by být měly), nýbržjsou tvořeny dvojicemi čar ležících těsně u sebe;
– existence těchto dubletů je vysvětlitelná existencí elektronu ve dvou různých stavech
– jedná se o dva stavy, lišící se od sebe momentem hybnosti
⇒ elektron tedy má vnitřní moment hybnosti – spin
– zavádí se další souřadnice a spinová funkce σ charakterizující stav elektronu v atomu, která nabývádvou číselných hodnot
σ σ ψ ψ σ ψ ψ σπ π
ψ ϑ ϕ σ
= = − ⇒ = =1 2 1 , , 1 2 , , 2
, , ,
1 1 a a 2 2 2 2
( , , , )
l l
l s
n l m n l m
n l m m
h h
r
ELEMENTÁRNÍ ČÁSTICEBosony – částice, které mají v jednotkách Planckovy konstanty celočíselný spin (0, 1, 2, …)
– mezi bosony patří všechny intermediální částice fundamentálních interakcí; dále částice složené ze sudého počtu fermionových konstituentů (např. částice α - 4He nebo mezony)
– chování je řízeno Boseho-Einsteinovou statistikou, symetrická vlnová funkce, snášenlivé částiceFermiony – částice, které mají v jednotkách Planckovy konstanty poločíselný spin (1/2, 3/2, 5/2, …)
– mezi fermiony patří kvarky (a tedy i proton a neutron) a leptony (elektron)– chování je řízeno Fermiho-Diracovou statistikou, antisymetrická vlnová funkce, nesnášenlivé částice
Emisní spektrum atomu vodíku
PROBLÉMY:– jemná struktura čar ve spektru atomového vodíku
– štěpení spektrálních čar účinkem silného magnetického pole (Zeemanův jev)
Pauliho princip výlučnosti– žádné dva elektrony nemohou v atomu existovat ve stejném kvantovém stavu, vlnová funkce každého
elektronu musí být odlišitelná od vlnových funkcí ostatních elektronů
– každý AO určený vlnovou funkcí ψn,l,m může být obsazen pouze dvěma elektrony a ty musí mít opačnýspin – jejich vlnové funkce jsou
ψ ψ+ −1 1, , , , , ,2 2
a l ln l m n l m
– PP spolu s Heisenbergovým principem neurčitosti, resp. kvantová mechanika (na rozdíl od mechanikyklasické) vysvětlují fenomén neprostupnosti hmoty – dva atomy nebo dvě molekuly lze vzájemněpřibližovat tak dlouho, dokud se nezačnou překrývat jejich elektronové obaly, poté systém začne klástodpor, který není možné vysvětlit elektrickým ani jiným klasickým způsobem
– pokud by PP neplatil, mohly by se všechny elektrony stěsnat blízko jádra do stavu s nejnižší energií, atomy by byly mnohem menší, a atomy s různým počtem elektronů (a tedy i atomy různých prvků) byměli praktický stejné vlastnosti (ve skutečnosti se už přidáním jediného elektronu vlastnosti atomumění velmi výrazně, např. He → Li)
Obsazování atomových orbitalů – jednoelektronový systém– žádné dva elektrony nemohou v atomu existovat ve stejném kvantovém stavu, vlnová funkce každého
elektronu musí být odlišitelná od vlnových funkcí ostatních elektronů
– energie atomových orbitalů jednoelektronového systému ψ ψ+ −1 1, , , , , ,2 2
a l ln l m n l m
Obsazování atomových orbitalů – víceelektronové systémy, výstavbový princip– energie orbitalů téže n-kvantové sféry jsou diferencovány, zůstává zachována pouze degenerace
skupin orbitalů p, d, f ..
– každá n-kvantová sféra je tvořena n energetickými hladinami
Pravidlo n + 1
se vzrůstající energií orbitalu se zvyšuje hodnotasoučtu kvantových čísel n a l, ze dvou orbitalů mámenší energii ten, který má menší hodnotu součtun + l
při stejném součtu má energii ten orbital, který mámenší hodnotu n
Příklad:orbitaly 4s a 3d
n + l: 4 + 0 = 4 a 3 + 2 = 5energeticky níže je orbital 4s
orbitaly 4s a 3p
n + l: 4 + 0 = 4 a 3 + 1 = 4energeticky níže je orbital 3p, který má menšíhodnotu n
Obsazování atomových orbitalů – multiplicita elektronového spinu– multiplicita spinu je veličina vyjadřující přítomnost či nepřítomnost nepárových elektronů v atomu
∑ms – celkové spinové číslo získané součtem spinových čísel ms všech elektronů v atomu
= +∑2 1sm m
Hundovo pravidlo – pravidlo maximální multiplicity– elektrony se vždy na degenerovaném souboru orbitalů rozmístí tak, aby co největší počet AO orbitalů
byl obsazen jen jediným elektronem
⇒ v základním stavu nabývá multiplicita vždy nejvyšší hodnotu
Tvar atomových orbitalů a průběh vlnové funkce – orbitaly typu s
Tvar atomových orbitalů a průběh vlnové funkce – orbitaly typu p Tvar atomových orbitalů – orbitaly typu d a f Absorpce a emise elektromagnetického záření – spektrometrické metody– při průchodu elektromagnetického záření látkami dochází k vzájemné interakci, při níž atomy a molekuly
absorbují fotony vhodné vlnové délky a přecházejí do excitovaného stavu
– intenzita prošlého záření IP je nižší než intenzita záření dopadajícího IO zeslabení intenzity prošlého světla dané poměrem IP / IO se nazývá transmitance Tzáporný dekadický logaritmus transmitance je absorbance A
– Lambert-Beerův zákon
ελ je molární absorpční koeficient (dříve extinkční)
– v analytické praxi se Lambert-Beerova zákona využívá např. ke kolorimetrickému stanovení koncentracíbarevných roztoků
– obecně jsou spektra dvojího druhu – absorpční a emisní
emisní spektrum látky se získává analýzou záření látkou emitovaného
absorpční spektrum vzniká analýzou záření procházejícího vzorkem látky, který část záření pohlcuje
λ λε= − =log PM
O
IA c lI
absorpční spektrum
emisní spektrum
Atomová spektra– atomová spektra jsou čárová, složená z ostrých, od sebe zřetelně oddělených čar
– elektrony v atomech mohou nabývat jen zcela určitých energií
přechod elektronu z jednoho energetického stavu (orbitalu) do stavu jiného se může uskutečnit pouze přijetím nebo vysláním odpovídajícího fotonu o energii hυ
– emisní atomová spektra jsou tvořena čarami, které odpovídají fotonům vysílaným atomy při návratu elektronů ze vzbuzeného (excitovaného) do některého energeticky nižšího stavu
– absorpční spektra vznikají ozářením atomu např. bílým světlem, atom z tohoto světla pohltí pouzefotony s energiiíodpovídající právě energii nutné k excitaci elektronů ze základního stavu do některého stavu energeticky vyššího prošlé světlo je ochuzeno o vlnové délky odpovídající pohlceným fotonům, a ve spojitém spektru seobjeví tmavé čáry
Atomová spektra – emisní spektrum vodíku– pro každou čáru emisního spektra existuje přeskok elektronu z hladiny s energií En(j) na hladinu s nižší
energií En(i)
– všechny čáry emisního spektra lze rozdělit do sérií; do jedné série patří všechny čáry odpovídajícípřeskokům ze všech energeticky vyšších hladin (různé j) do jediné, pro danou sérii charakteristickéhladiny i
( ) ( ) ν νλ
− = Δ = = =n j n jhcE E E h hc
Molekulová spektra– kromě změn v důsledku pohybu elektronů mezi jednotlivými molekulovými orbitaly dochází u molekul ke
změnám energetických stavů souvisejících s pohybem atomových jader
– celková energie molekuly může být vyjádřena jako součet tří přibližně nezávislých energetických členů
energie elektronů Ee – největší příspěvek, energie fotonů ultrafialového a viditelného záření
vibrační energie molekuly Ev – středně velký příspěvek, fotony infračerveného záření
rotační energie molekuly Er – nejmenší příspěvek, fotony vzdálené infračervené oblastia mikrovlnné oblasti
Δ = Δ + Δ + Δ
Δ Δ Δ
e v r
e v r
E E E E
E E E
ATOMOVÉ JÁDROVazebná energie jádra– energie jádra Ej, která se uvolní při vzniku tohoto jádra z volných nukleonů (protonů a neutronů); až na
znaménko je tato energie shodná s energií potřebnou pro rozštěpení jádra na volné nukleony
– vznik atomu je spojen s hmotnostním úbytkem – hmotnost atomu je vždy menší než součet hmotnostíelementárních částic, z nichž je vystavěn
Příklad:
( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )
1 1 11 0 1
1 1 11 0 1
2
−
−
< + − +
Δ = + − + −
= Δ
AZ
AZ
X p n e
p n e X
.j
M ZM A Z M ZM
M ZM A Z M ZM M
E M c
( )( ) ( )( )
27
27 27
31
29 12 12
1 67252 10
1 67482 10 6 64644 10
9 21091 10
5 00618 10 4 50 10 2 71 10
−
− −
−
− −
=
= =
=
Δ = ⇔ = ⇒ =
11
1 40 2
0-1
42
p kg
n kg He kg
e kg
kg J; 1 mol He J
, .
, . , .
, .
, . , . , .j j
M
M M
M
M E E– energie spojené s jadernými procesy jsou zhruba 105 až 106-krát větší než energie spojené s procesy
probíhajícími v elektronovém obalu
MODELY ATOMOVÉHO JÁDRAKapkový model– jádro je popisováno jako kapka nestlačitelné kapaliny
– hustota látky vytvářející jádro je pro všechna jádra konstantní, objemy jader jsou úměrné počtu nukleonů, měrná vazebná energie nukleonu je v různých jádrech přibližně stejná
– lze aplikovat veličiny známé z termodynamiky kapalin, lze definovat teplotu jádra a uvažovat „vypařování“ nukleonů při dostatečné excitaci
– model vhodný pro výklad teorie složeného jádra, jaderného štěpení, jaderných kmitůlze odvodit obecný vzorec pro hmotnost jádra
Hladinový (slupkový) model– jádro má definovanou strukturu a nukleonům lze připisovat určité konfigurace
– jaderné částice mohou podobně jako elektrony v atomovém obalu nabývat pouze určitých diskrétních energií, tzn. jsou přítomny na určitých energetických hladinách jejichž počet determinuje Pauliho princip
– kvantové stavy jsou charakterizovány pomocí kvantových čísel
– model dobře vysvětluje existenci magických čísel, nábojovou nezávislost jaderných sil, problematikujaderné izomerie
Kolektivní model, shlukový model, supratekutý model
Stabilita atomových jader– jádra s velkou vazebnou energií obecně nejeví tendenci k samovolným přeměnám – rozpadu nebo
slučování
– prvky s nukleonovými čísly v intervalu ⟨30,120⟩ jsou velmi stabilní, zbývající jádra mají nukleárnístabilitu více či méně stabilní (podléhají fúzi nebo rozpadu)
Stabilita atomových jader– lehká jádra podléhají syntetickým procesům (nezbytná energetická dotace); tokamak, hvězdy
γ
→
→
1 1 2 11 1 1 +1
2 1 31 1 2
H + H H + e
H + H He + – těžká jádra podléhají spontánnímu štěpení; všechny prvky s hodnotou protonového čísla vyšší než 3
jsou přirozeně radioaktivní
→
→
235 1 93 140 192 0 36 56 0
235 1 90 144 192 0 38 54 0
U + n Kr + Ba + 3 n
U + n Sr + Xe + 2 n– stabilita nuklidů souvisí s poměrem počtu protonů a neutronů v jádře
⇒ stabilní přírodní nuklidy mají vyvážený a velmi málo proměnný počet protonů a neutronů(N je 1,0 – 1,6 Z); lehké prvky – 1:1, nejtěžší prvky – 3:2
⇒ nejhojněji jsou rozšířeny nuklidy se sudými Z i N
⇒ jádra s lichou hodnotou některého z čísel jsou méně stabilní
⇒ jádra s oběma lichými čísly se samovolně rozpadají výjimkou jsou jádra s A < 14
⇒ nuklidy s nukleonovými čísly 4, 8, 12, 16, 20, 24 a 28 vykazují zvlášť vysokou stabilitu
⇒ magická čísla – 2, 8, 20, 28, 50, 82 a zřejmě i 114, 126, 164 a 184; pokud protonové nebo neutronové číslo nabývá těchto hodnot, vykazuje jádro zvýšenou stabilitu
2016 24 28 408 12 14O, Mg, Si, Ca
71 6 10 141 3 5H, Li, B, N
Radioaktivita– samovolná eliminace některých elementárních částic nebo jejich skupin z prostoru jádra
– je doprovázena třemi typy záření – α, β, γ
→1 1 00 1 -1n p + e
→
→
A A 0Z Z+1 -1
32 32 015 16 -1
X Y + e
P S + e
Přeměna β-– jádra s nadbytkem neutronů snižují jejich počet vnitrojaderným procesem
proton zůstává v jádru, elektron atom opouští jako β- záření